1. Introduction
An accurate estimation of real-time vehicle position is a crucial requirement for the success of many protocols, algorithms, and applications of vehicle safety and intelligent transportation systems (ITS) [
1,
2,
3,
4]. For example, in the medium-access control (MAC) layer, a vehicle at a longer distance from the sending vehicle is likely to be chosen as a relay node for message dissemination [
2]. In the geographic routing algorithms, a message is forwarded to the closest neighbor vehicle to its destination [
3]. In addition, limiting the uncertainty of vehicle position to the width of a lane is of utmost importance in vehicle tracking and many cooperative safety-critical applications, such as cooperative collision avoidance, lane change warning, etc. [
1,
4].
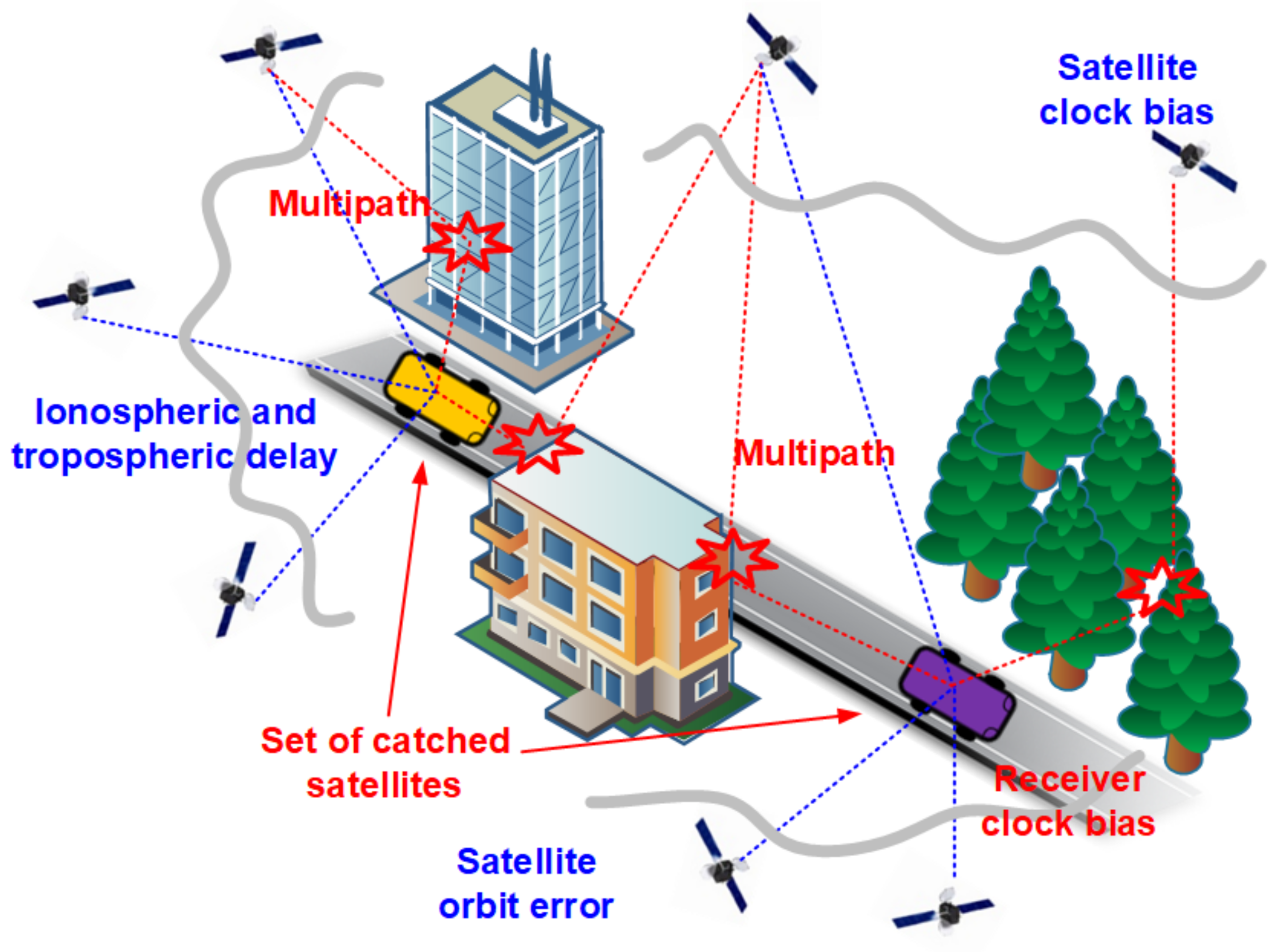
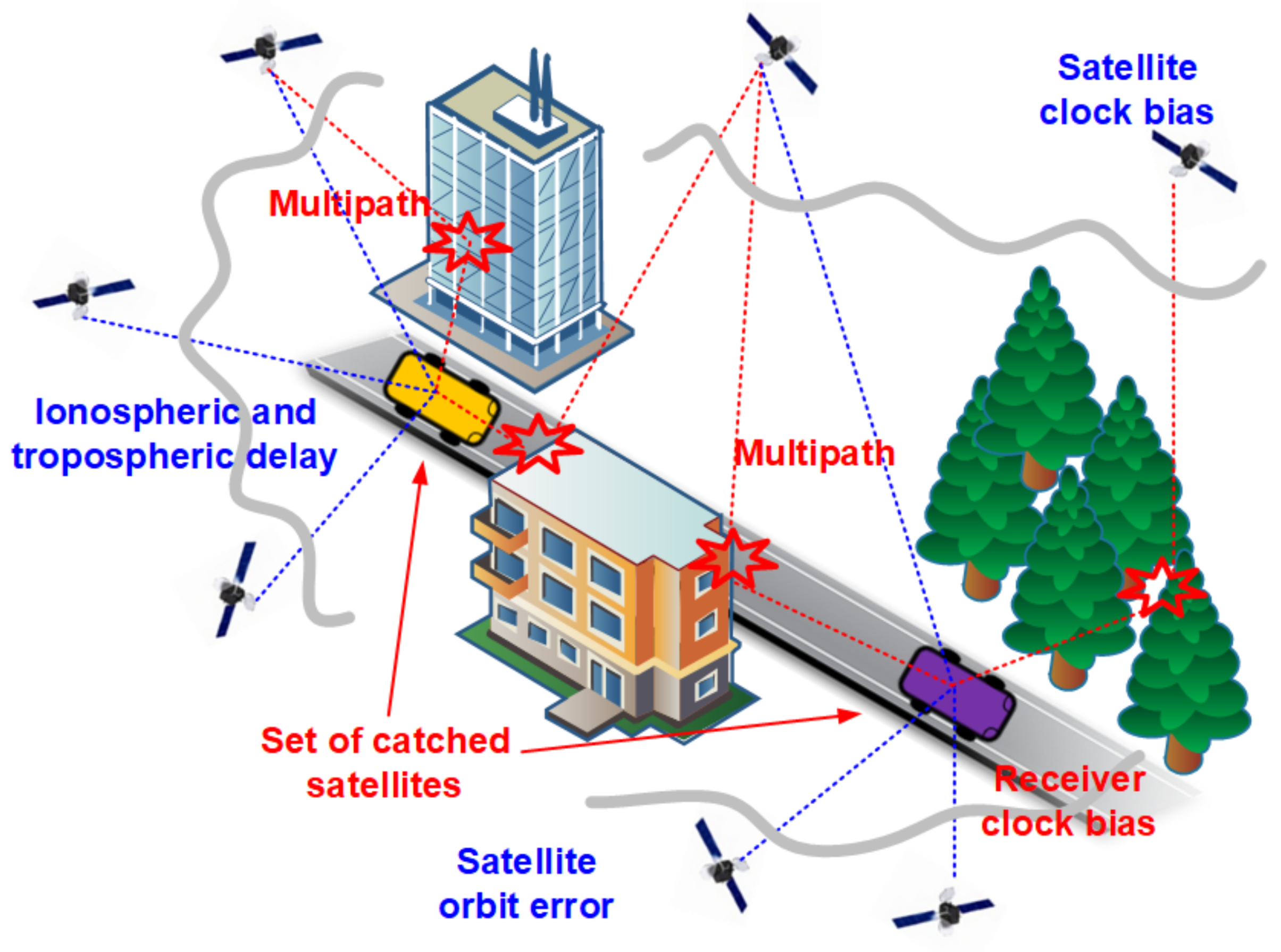
The Global Navigation Satellite System (GNSS), such as the Global Positioning System (GPS) or the Galileo system, is widely adopted for vehicle positioning due to the cost efficiency, the global coverage, and the availability of commodity GPS receivers in the marketplace. In this system, both the position and the reference time of a vehicle are estimated by real-time processing of radio-frequency (RF) signals sent from at least four different satellites [
5]. However, it is shown that its position estimate has the uncertainty up to tens of meters, and is temporarily unavailable in harsh environments, such as tunnels, buildings, vegetations, etc. [
4,
5,
6]. In this paper, we focus on the vehicle positioning scheme that can reduce the uncertainty of GPS position estimate.
In the last few decades, extensive studies have been devoted to accurate and reliable estimation of vehicle state, which is defined as the combination of vehicle kinematics including position, speed, and/or heading. The basic idea of this approach is the use of sequential estimator incorporating direct and indirect observations of vehicle state, which consists of the following two state estimations [
7,
8,
9]: first, the predicted vehicle state is represented by a set of system equations in terms of the current vehicle state, the measured control inputs, and the system noises. Second, the measurement of vehicle state is also formulated by system equations with respect to the predicted state and the measurement of on-board sensors, such as the GPS, accelerometer, compass, and/or gyroscope. When a GPS outage happens, the accumulation of predicted vehicle states can be used for the position reference, which is called the dead reckoning [
5,
7]. When both estimates are available, the accuracy of vehicle state can be significantly improved by using a linear least-square optimal estimator, called the Kalman filter [
7,
8,
9].
In the last decade, the automotive industry has commercialized many on-board exteroceptive sensors, such as radars, cameras, and laser scanners, for estimating the relative state of surrounding objects [
10,
11,
12,
13,
14,
15,
16,
17]. This estimate is called the local sensing estimate (LSE) in this paper. These sensors were initially introduced to the high-end cars only, currently also being mounted on the mid-range cars, and expected to be present all kinds of cars soon. The richness and high precision of these devices make it possible to estimate both relative and absolute positionings with high accuracy [
10]. In detail, the relative positioning of each surrounding vehicle is a key parameter of collision risk assessment [
10,
11,
12], whereas the absolute positioning with high-precision environment map is the essential functionality of autonomous driving [
13,
14,
15,
16]. The primary goal of this paper is to improve the accuracy of absolute positioning without high-precision environment map.
With the recent standardization of vehicle-to-everything (V2X) communications in [
18,
19,
20,
21,
22], the on-board V2X communication device can be seen as a virtual sensor that cooperatively provides the proprioceptive sensing data of neighbor vehicles, such as sensing time, position, speed, heading, etc. To collect these sensing data, an on-board unit (OBU) usually has a GPS receiver and the interface to in-vehicle networks, such as the controller-area networks (CAN) [
23]. Furthermore, information sharing via the V2X communications relaxes the limitations of on-board exteroceptive sensors: The V2X communication signal reaches up to one kilometer and is less susceptible to the requirement of direct visibility. In this paper, the state estimate of neighbor vehicle via the cooperative V2X communications is called the remote sensing estimate (RSE).
Given both estimates of vehicle state, it is natural to ask the following questions:
How should the framework of sensor-data fusion between these two sets of sensing estimates be designed? and
How can the statistical characteristics of estimated pairs be exploited to improve the accuracy of vehicle positioning? In highly dynamic vehicular environments, it is challenging to find the answers to these questions, due to the uncertainty of GPS device, no common reference of vehicle state between them, the cardinality of both estimates spanning up to a hundred of vehicles, highly dynamic connectivity and visibility conditions, and possibly incorporating indirect, inaccurate, and intermittent observations. Although a few different approaches, such as the GPS pseudorange sharing [
24,
25] and the crosslayer V2X positioning [
26,
27,
28,
29], have recently been introduced in the area of cooperative vehicle positioning, these research questions still remain open.
In this paper, based on our earlier works in [
30,
31], we present a novel framework of
spatiotemporal local-remote sensor fusion (ST-LRSF) that improves the accuracy of absolute vehicle positioning using the statistical correction information extracted from the data association between two sets of state estimates. In order to identify the sets of surrounding and neighbor vehicles, the ST-LRSF first presents a constant-speed model to estimate the present state of missed LSE and RSE, respectively. It also determines the reference vehicle state to which both sensing estimates can be easily converted. To mitigate the instant randomness of GPS position estimate, the ST-LRSF proposes a spatiotemporal dissimilarity metric between two reference vehicle states. Then, the greedy sensor-data association (GSA) algorithm is presented to compute a minimal weighted matching (MWM) between both sets of sensing estimates. Given the outcome of MWM with cardinality
M, the position refinement with center of mass (PRCoM) is proposed to refine the vehicle positioning whose theoretical lower bound (LB) on the uncertainty is down to
of GPS error. It is also shown that the positioning uncertainty can be further reduced by taking the refined position of ST-LRSF as a measurement input of extended Kalman filter (EKF). The numerical results show that the ST-LRSF schemes achieve the best positioning accuracy for a wide range of parameters: the standard deviation (STD) of GPS error, vehicle density, sensing range, sensing period, and vehicle speed. Our contributions are summarized as follows:
A comprehensive model for cooperative vehicle positioning is established to clearly address the detailed characteristics of multiple different on-board sensors.
The framework of ST-LRSF is shown to be computationally efficient, robust to the instant randomness of GPS error, adaptive to the dynamic change of estimation sets, and not incurring any additional overhead to the V2X communications.
The spatiotemporal dissimilarity metric is proposed for the sensor-data association, and is shown to be effective for the mitigation of instant random GPS error.
To the best of our knowledge, the PRCoM is the first approach that exploits the aggregated statistical characteristics of surrounding vehicles to improve the positioning accuracy of vehicle itself. In addition, the lower bound on the root-mean-square error (RMSE) of PRCoM is proven to be of GPS RMSE.
The remainder of this paper is organized as follows. We first summarize the related work in
Section 2, and introduce the model for cooperative vehicle positioning in
Section 3. Based on this model, the cooperative vehicle positioning problem is specified in
Section 4. To address this problem, we present the framework of ST-LRSF in
Section 5. In
Section 6, the numerical results from extensive simulations are presented and discussed. Finally, we conclude this paper in
Section 7.
4. Problem Specification
Sensor fusion techniques intelligently combine multiple heterogeneous sensor data so that the resulting data have less uncertainty than the individual sensor data [
35]. Since each piece of sensor data is a mixture of the ground truth and the measurement errors, there is the origin uncertainty problem in the fusion of multiple heterogeneous sensing data [
13,
14,
33]. The existing approaches to tackling this problem are classified into two categories: the probabilistic and the distance-based approaches. The former approach addresses this problem by integrating a tracking filter with a probabilistic estimator, such as the Bayesian MAP and the maximum likelihood (ML) estimator [
13,
33]. This approach can obtain the optimal solution, but the complexity of computing the association probability of all valid pairs may grow exponentially with the number of targets. On the other hand, the latter approach utilizes the fact that the two sensing estimates originated from the same source will have similar values in their representation. If the metric for evaluating the dissimilarity between two points is defined well, the remaining problem is how to associate them based on the metric [
14].
In this paper, we formulate our research problem based on the distance-based approach. We attempt to improve the position accuracy of pivot vehicle p at the end of i-th frame based on a new framework of sensor fusion: given its own RSE , the set of RSEs via the V2X communications, and the set of LSEs detected by its on-board radar, the objectives of sensor fusion framework are:
to define a spatiotemporal dissimilarity metric between two sensing estimates to reduce the instant randomness of GPS device,
to design the association algorithm between an element of (absolute) RSEs and an element of (relative) LSEs, i.e., , that minimizes a dissimilarity metric; and
to design the position refinement algorithm that reduces the impacts of dominant random GPS error based on the LSE-RSE pairs of sensing data.
In vehicular environments, it is challenging to achieve these objectives, due to the uncertainty of GPS device [
5], no common reference of vehicle state [
10], the cardinality spanning up to a hundred of vehicles [
36], and highly dynamic connectivity and visibility conditions [
37]. Since the DSRC channel congestion can significantly deteriorate the performance of safety-critical applications [
36], it is also within our interests to find the solution that achieves these challenging goals without incurring any additional messages to the V2X communications.
5. Spatiotemporal Local-Remote Sensor Fusion (ST-LRSF)
In this section, we present the ST-LRSF scheme that improves the position accuracy of pivot vehicle through the fusion of (absolute) RSE and (relative) LSE . The ST-LRSF scheme first addresses the problem of identifying the vehicles in both RSR and LSR . Next, it defines the reference vehicle state to which both RSE and LSE can be converted. It also defines the dissimilarity metric for a pair of reference vehicle states. Then, a GSA algorithm is presented to find an MWM between both reference states. Based on the outcome of MWM, the ST-LRSF scheme finally refines the position of pivot vehicle by comparing the center of mass (CoM) of RSE polygon with that of LSE polygon.
We also show that the refined position of ST-LRSF can be used as a measurement input of EKF model in order to further improve the accuracy of vehicle positioning.
5.1. Identification of Sensed/Neighbor Vehicles
At each frame
i, the set of RSVs
and the set of LSVs
are constructed from the received RSEs
and the sensed LSEs
, respectively. In general, these sets do not reflect the ground truth because of the following two factors: the lost RSEs due to the beacon loss at the DSRC channel, and the missed LSEs originating from the RF-signal obstruction. To better estimate the ground truth, the ST-LRSF scheme employs the
constant-speed estimator (CSE) that linearly interpolates the current position of vehicles based on the latest estimate of vehicle state [
36].
To distinguish the beacon loss at the DSRC channel from the neighbor vehicle out of RSR
, the pivot vehicle defines the candidate set of RSVs
. On receiving RSE
, the pivot vehicle inserts vehicle
k to sets
and
. At the end of frame
i, the pivot vehicle estimates the relative distance to each vehicle
based on the CSE, i.e.,
where
j is the frame index in which the latest beacon of vehicle
is received by the pivot vehicle. If the distance in Equation (
9) is no greater than the RSR, the pivot vehicle interprets that the beacon of vehicle
is lost at the DSRC channel, and thus keeps it in set
. Otherwise, it does not insert vehicle
to set
and discards all corresponding weights
because it is considered as the target out of RSR.
The pivot vehicle also utilizes the candidate set of LSVs
to distinguish the obstruction of RF signal from the target out of LSR
. For each LSE
, the pivot vehicle inserts vehicle
n to sets
and
. At the end of frame
i, the pivot vehicle estimates the relative distance to each vehicle
using the CSE, as follows:
where
j is the index of the latest frame where vehicle
is detected by the pivot vehicle. If the distance in Equation (
10) is no greater than the LSR, the pivot vehicle infers that the radar signal to vehicle
is obstructed by an object, and still keeps vehicle
in set
. Otherwise, it does not insert vehicle
to set
and discards all corresponding weights
because it is considered to be out of LSR.
5.2. Conversion to the Reference Vehicle State
Notice that RSE
in Equation (
4) includes a few absolute vehicle kinematic parameters, while LSE
in Equation (
8) has a few relative vehicle kinematic parameters to those of pivot vehicle. Since both of them also have random measurment errors, a unified vehicle state must be determined to match a pair of RSE
and LSE
based on the dissimilarity metric
. To make a common metric either relative or absolute, the ST-LRSF scheme must incorporate the RSE of pivot vehicle
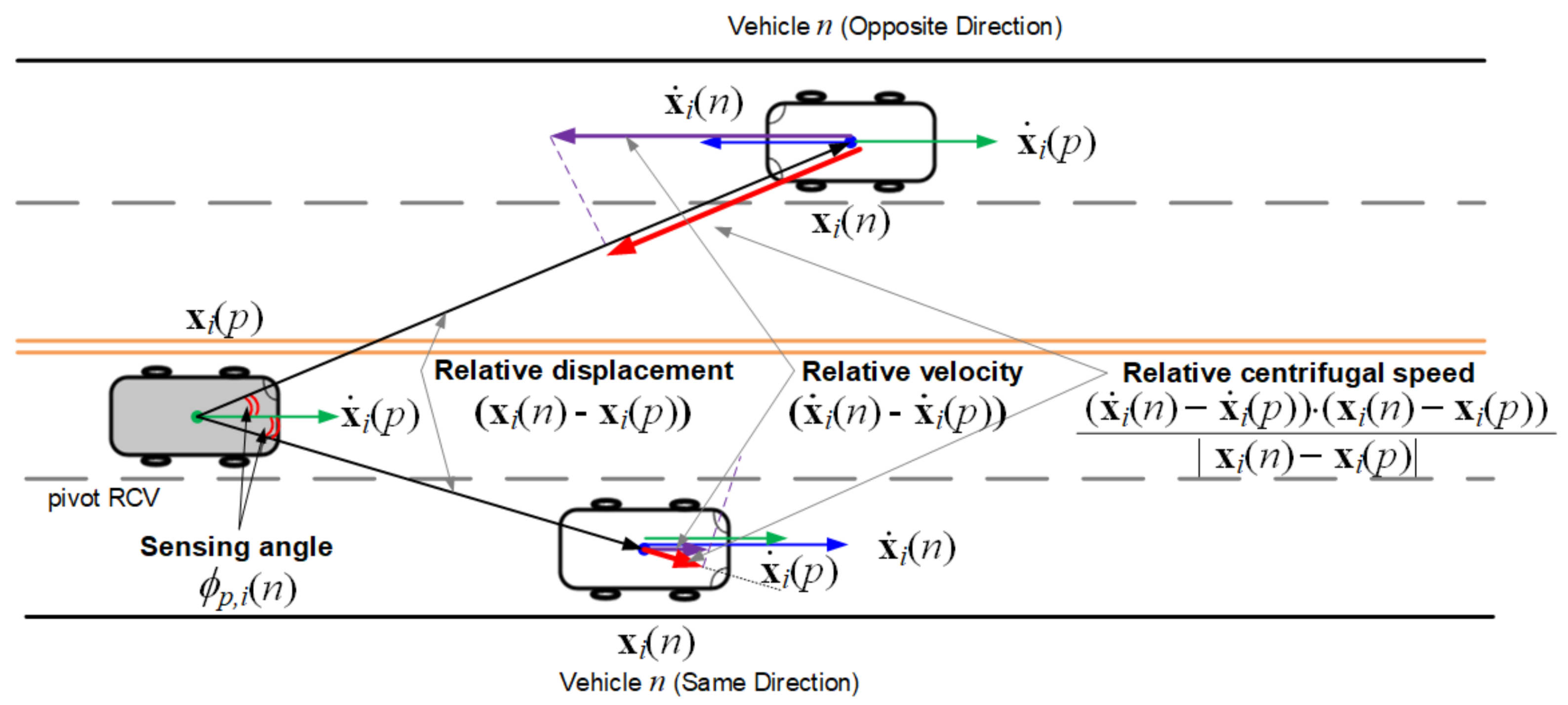
. Furthermore, it must consider the limitation of on-board radar that it cannot estimate the relative tangential speed. Taking into account both constraints, we define the
reference state of vehicle
v as the absolute position in a two-dimenstional Cartesian coordinate and the absolute centrifugal speed:
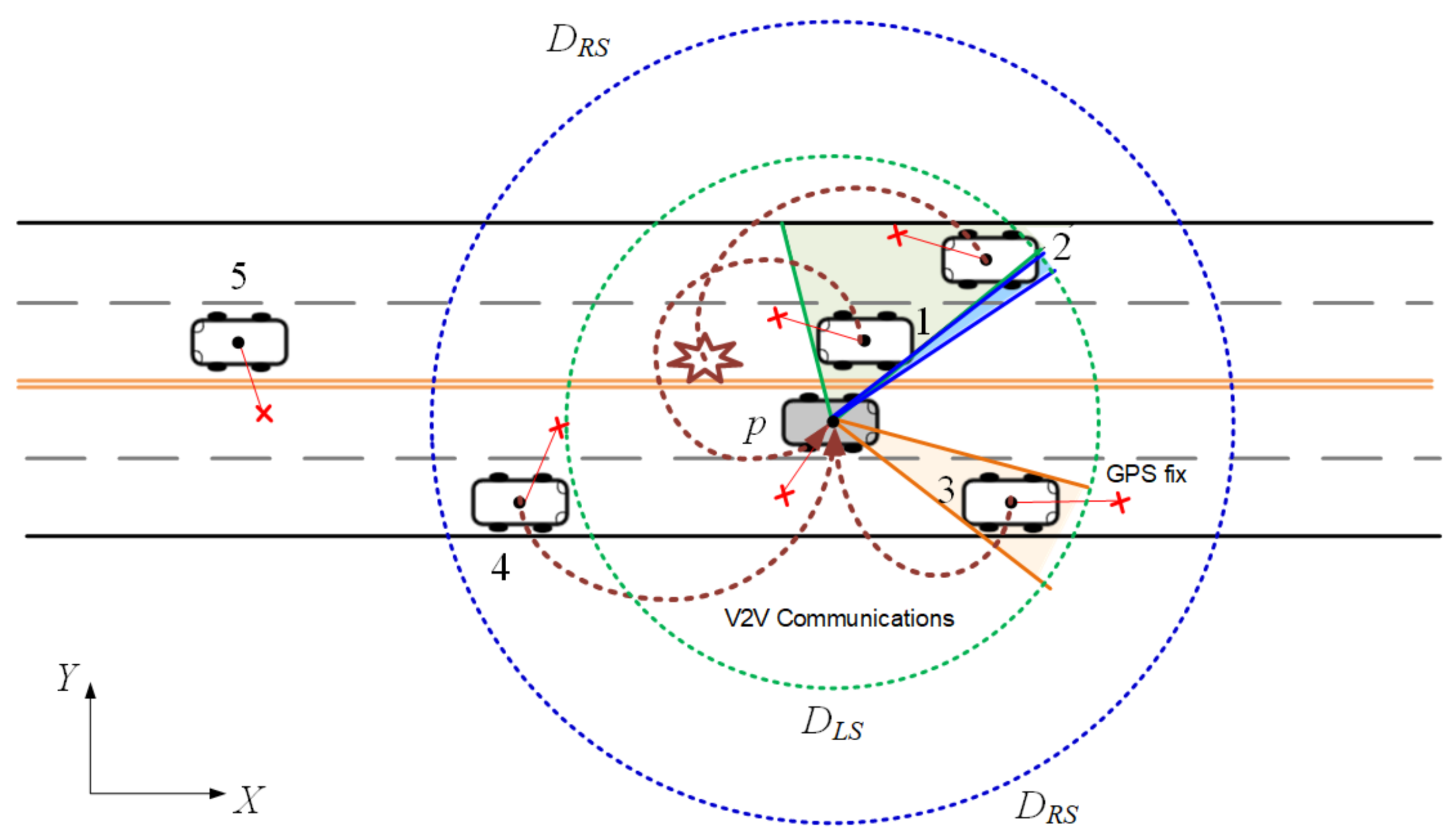
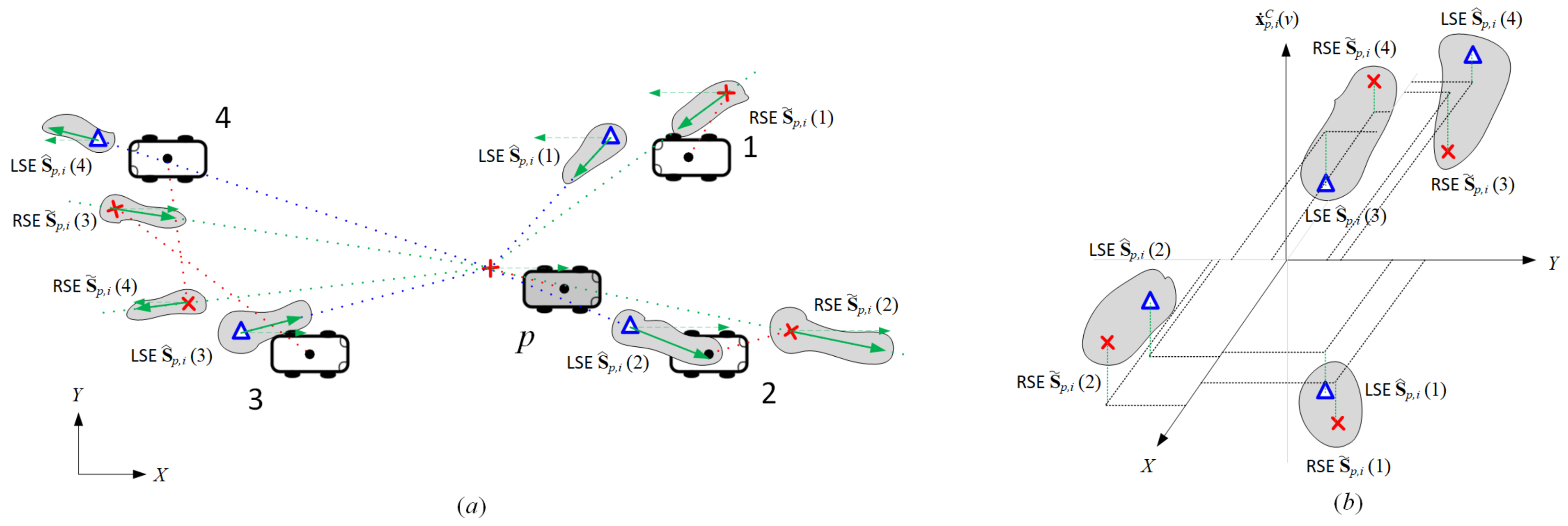
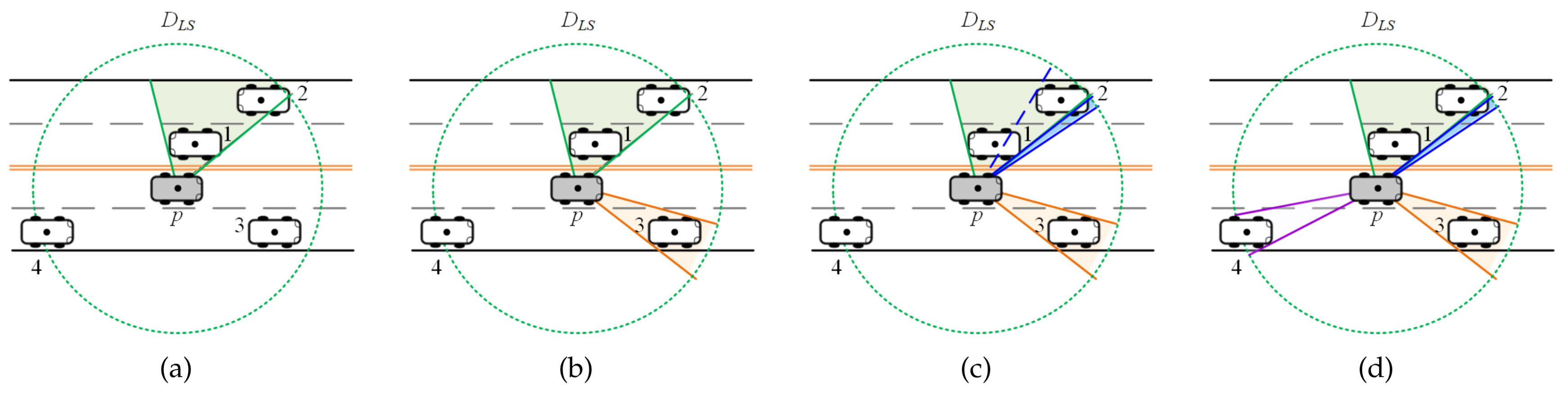
In
Figure 4, each vehicle in
has two corresponding shaded regions: one for the reference RSE
and the other for the reference LSE
. For
, the corresponding reference RSE
is denoted by
Since the GPS position estimate
marked with red cross in
Figure 4 is an absolute metric, we can reuse it as the corresponding element of reference vehicle state. The absolute centrifugal speed represented by green solid arrow in each RSE region can be obtained from the projection of vehicle speed
onto the sensing angle, i.e.,
For
, the ST-LRSF scheme combines the relative LSE
with the RSE of pivot vehicle
to obtain the reference LSE
:
First, the absolute position estimate
marked with blue triangle in
Figure 4 can be represented by the sum of RSE
and relative distance
, as follows:
Second, the relative centrifugal speed
depicted with the green solid arrow in each LSE region is also formulated into the projection of pivot-vehicle speed onto the sensing angle plus the relative centrifugal speed
:
5.3. The Design of Dissimilarity Metric
The computation of reference RSE
and reference LSE
in Equations (
12)–(
16) involves the measurement noise of multiple different sensors possibly detecting different physical quantities, e.g., position, speed, angle, etc. Then, both estimates can be represented by a point in three-dimensional Cartesian coordinates in
Figure 5b, where two axes correspond to the vehicle position and the remaining one to the absolute centrifugal speed. Since all sensor measurement errors are assumed to be zero-mean white Gaussian, the two estimates originated from the same vehicle are expected to be in close distance from each other. The goal of this section is to design a fair dissimilarity metric for given RSE
and LSE
. When the variance of
in each axis is the same, a simple Euclidean distance would be a viable solution to the dissimilarity metric. However, in general cases where the samples of
are spread out over each axis differently, the dissimilarity metric should reflect how many standard deviations away the LSE is from the RSE along each axis and vice versa, which is known as the Mahalanobis distance. Then, the spatial dissimilarity
between RSE
and LSE
is represented by
where
is the covariance matrix of
that is derived in the
Appendix A. Since each measurement noise is an uncorrelated Gaussian, the spatial dissimilarity
can be approximated by the chi distribution with three degrees of freedom.
Given that pivot vehicle
p correctly matches neighbor vehicle
k with sensed vehicle
n in the latest frame
j, the corresponding weight
is likely to be the smallest among all contending pairs, as frame index
i increases, i.e.,
On the other hand, if there is an mismatch in the latest frame, the corresponding weight will increase with the growth of disparity in the kinematics between neighbor vehicle k and sensed vehicle n.
Due to the instant randomness of measurement noise, the spatial dissimilarity metric results in more frequent matched pairs, as shown in
Figure 5. In this example, the GPS position estimates of vehicles 3 and 4 are flipped over, which may lead to a mismatch in the GSA algorithm. To reliably match a pair of estimates against this instant randomness, the ST-LRSF scheme adopts the
spatiotemporal dissimilarity. In this metric, weight
and counter
of matched pair
and
are computed by the cumulative moving average (CMA), as follows:
where
j is the latest frame index where both RSE
and LSE
are available in pivot vehicle
p.
5.4. A Greedy Sensor-Data Association Algorithm
In this section, we construct bipartite graph
to address the association problem, where the edge connecting neighbor vehicle
and sensed vehicle
has weight
. To reduce the computational complexity of assocation, we use gating threshold
to filter out the assoication pairs with high spatial dissimilarity. In other words, an edge whose spatial dissimilarity in Equation (
17) is no less than
is removed in bipartite graph
G. Then, the objective of GSA algorithm is to find a subset of edges whose vertices are all disjoint, called a matching [
38]. We denote by
, the MWM consisting of
edges, as follows:
Notice that MWM is a matching having the following two characteristics:
saturates all vertices in either or , or there is no edge that connects a pair of new vertices in both sets; and
The sum of edge weights in is minimal, i.e., given , it is not possible to further reduce the sum of weights without breaking the requirements of matching.
Algorithm 1 illustrates the pseudocode of GSA algorithm that takes bipartite graph
G and the weight for each edge as input parameters and outputs MWM
. First, output
and priority queue
are initialized to be empty (line 1). For each edge (
) whose spatial dissimilarity is less than
, the GSA algorithm computes the weight of each edge, and inserts it into priority queue
(lines 2–9). Denoting the number of edges satisfying
by
, the running time of this operation is
, where the first term is for computing the spatial dissimilarity and the second term is for building binary heap
[
39]. Then, it repeats the following statements until priority queue
becomes empty (lines 10–16): The GSA algorithm first extracts the least-cost edge
from
(line 11). If neithor
nor
exists in the existing MWM
, the GSA algorithm inserts it into the MWM
. Otherwise, simply discards edge
(lines 12–15). The running time of while loop is
. Finally, it terminates the procedure by returning
, where the overall running time of GSA algorithm is
(line 17).
| Algorithm 1 Greedy Sensor-Data Association (GSA) Algorithm. |
| Input: Vertex sets and , and weight for edge . |
| Output: Minimal weighted matching . |
| 1: | Initialize and priority queue . |
| 2: | fordo |
| 3: | for do |
| 4: | if then |
| 5: | Compute weight of . |
| 6: | Insert edge e into priority queue . |
| 7: | end if |
| 8: | end for |
| 9: | end for |
| 10: | while is not empty do |
| 11: | Extract the least-cost edge from . |
| 12: | if and then |
| 13: | . |
| 14: | else Discard edge . |
| 15: | end if |
| 16: | end while |
| 17: | return |
We define the set of neighbor/sensed vehicles in the output of GSA algorithm
, as follows:
where
. Assuming that
and
of MWM
in Equation (
20) indicates the same vehicle for
, we can partition each of these sets’ two subsets: First, the set of neighbor vehicles
is partitioned into
and
Similarly, the set of sensed vehicles
is partitioned into
and
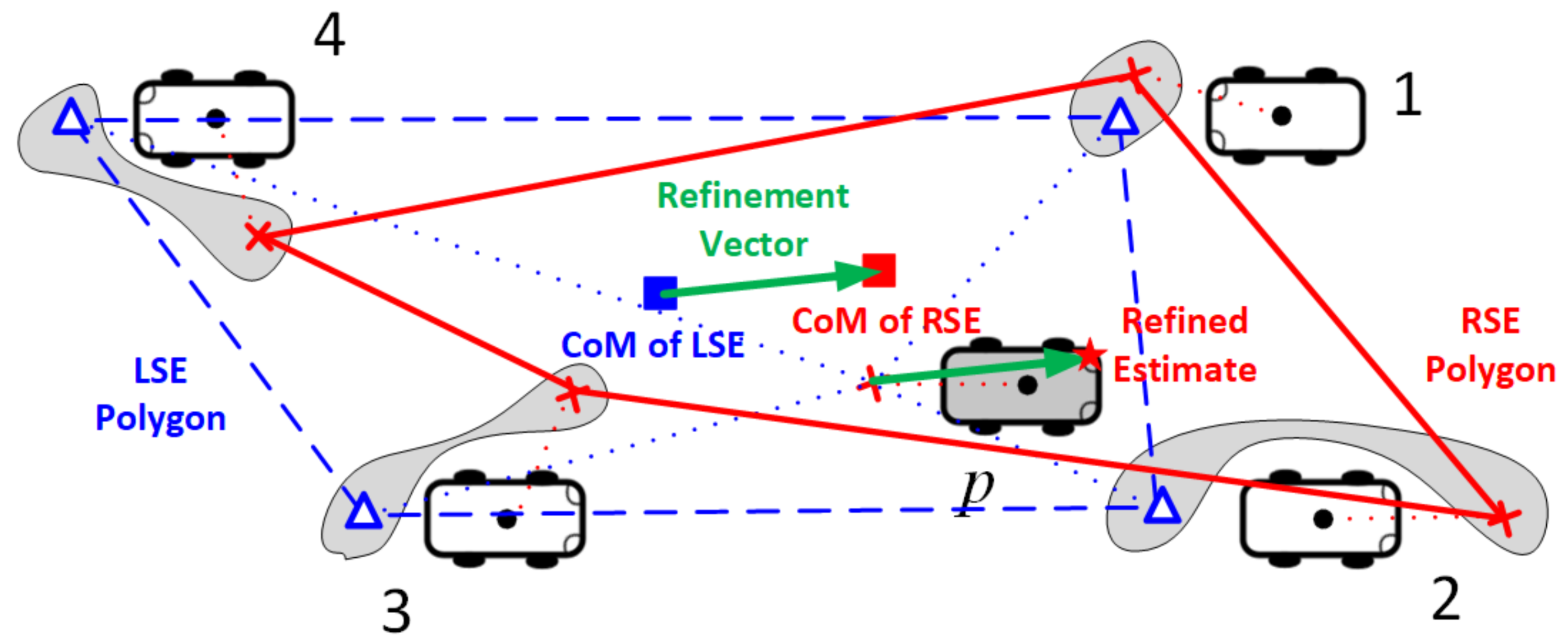
5.5. Position Refinement by Center of Mass (PRCoM)
Given the set of matched pairs in
, we next address the design problem of the position refinement algorithm that can accurately estimate the position of pivot vehicle
p.
Figure 6 illustrates a road environment in which the pivot vehicle is running with four surrounding vehicles, each of which has a remote position estimate
, marked with red cross, and a ranging measurement
by the on-board radar, marked with blue triangle. The basic idea of the PRCoM is
to refine the accuracy of position estimate through the comparision of the CoM of the RSE polygon, consisting of all remote position estimates of , with that of LSE polygon, comprising of all local position estimates of .
The PRCoM conceptually draws the RSE polygon by visiting each position vector
at once. It also draws the LSE polygon by visiting each two-dimensional position vector
at once. In
Figure 6, an example of RSE polygon is represented by red solid lines, while that of LSE polygon is drawn with blue dashed lines. Notice that, regardless of visiting order, the CoM of polygon consisting of the same position vectors is the same. This is because the CoM is the average of all position vectors in the polygon. The PRCoM scheme estimates the final position of pivot vehicle by summing the self position estimate
and the refinement vector, which is defined as the CoM of RSE polygon subtracted by that of LSE polygon (See
Figure 6).
Theorem 1. In the situation where GPS error is the dominant source of measurement noise, the RMSE of PRCoM scheme is , given that there is no mismatching in MWM ().
Proof. The position error of a neighbor vehicle has no correlation with the others because the random GPS error
is
i.i.d, as shown in
Figure 6. Using Equation (
2), the CoM
of RSE polygon is formulated by
On the other hand, the position estimate of each sensed vehicle is the true position estimation biased by the random GPS error
. Since the GPS error is the dominant source of position uncertainty in Equations (
15) and (
A4), the CoM
of LSE polygon is formulated as follows:
The refinement vector
of pivot vehicle is defined as the CoM of RSE polygon subtracted by that of CSE polygon. Using Equations (
21) and (
22),
is represented by
The final estimate
for the position of pivot vehicle
p can be represented by the sum of its GPS position fix
and the refinement vector
,
Since
, the second term on the right-hand side (RHS) of Equation (
24) cancels itself out. Then, the refined position estimate
can be obtained by the sum of unknown true position and the sample average of
i.i.d zero-mean Gaussian random variables in
:
From the law of large numbers (LLN), the refined position estimate converges to the true position, i.e., , and the STD of final position error becomes of the original GPS error . ☐
When there exist mismatched pairs in the MWM
, the position difference between the neighbor vehicles in
and the sensed vehicles in
becomes the additional source of PRCoM positioning uncertainty, as follows:
5.6. Extended Kalman Filter Model with ST-LRSF
In this section, we design the EKF model whose state
is defined as that in Equation (
1) (In this section, we omit the index of pivot vehicle
p between parenthesis in all notations for the expressional simplicity.):
. In this model, the refined position of PRCoM scheme in Equation (
24) is used as a part of measurement
, i.e.,
.
The trace of vehicle mobility simulator in this paper consists of the true position
and speed
[
40]. To simultaneously match both position and speed of pivot vehicle in two consecutive frames, we consider a linear-acceleration mobility model whose acceleration at time
is represented by
, where
In a straight road, the predicted state estimate
is formulated by a nonlinear differentiable function
, i.e.,
where
is the updated estimate of EKF at the previous frame, and
is the control input of vehicle
. The predicted covariance estimate
is also represented by
, where
is the Jacobian of function
, and noise covariance matrix
is set to zero.
Given the measurement
and the predicted estimate of state
and its covariance
, the expression of optimal Kalman gain
, the update equations for the state
and its covariance
are identical to those of (linear) Kalman filter, as follows:
where
is the identity matrix
, and measurement covariance matrix
is
6. Numerical Results
In this section, we present the numerical results of three vehicle positioning schemes obtained from extensive simulations: the raw GPS, marked "GPS", the LRSF using spatial weight in Equation (
17) only, marked "S-LRSF", and the LRSF with spatiotemporal weight in Equation (
19), marked "ST-LRSF". We also compare the LRSF schemes with two ideal positioning schemes:
To identify the best achievable performance of LRSF scheme, we present the numerical results of LRSF with perfect matching, marked with “LRSF-PM”, by which the correct pairs of both estimates are always found for given and .
We also compare the numerical results of LRSF schemes with those of the ideal IVCAL scheme, marked with “IVCAL” [
28]. In this scheme, we assume that the system can always make the best choice between the GPS position estimate and the one by the trilateration of three position anchors having the best positioning accuracy. In other words, the position estimate closer to the ground truth is always used for the measurement input of KF.
We sequentially conduct three simulations for collecting the numerical results of these schemes. The Simulation of Urban MObility (SUMO) is used for the trace of all vehicles based on the car-following model [
40]. At each time of trace, the vehicle sensing simulator (VSS) constructs the set of sensed vehicles
for each pivot vehicle
p using the algorithm in
Appendix B. Taking this trace and the set of sensed vehicles as inputs, a detailed packet-level network simulation is done using the QualNet simulator [
41].
Two vehicle mobility models are considered in a straight road segment: a ten-vehicle mobility (TVM) and a large-scale mobility (LSM). In the TVM, a group of five vehicles enters at each end of road segment, and runs toward the opposite end. On the other hand, in the LSM, a large-scale vehicle trace is produced to examine the impacts of key parameters on the positioning accuracy of LRSF schemes. The LSM simulation were carried out until positioning samples were gathered for each point of a graph. To minimize the boundary effects in the LSM, we also exclude the numerical results of vehicles in 500-m distance from both ends of road segment.
The list of simulation parameters is summarized in
Table 2. In the QualNet simulation, the IEEE 802.11a physical- and MAC-layer parameters are modified to be compatible with IEEE 802.11p standard [
19]. The DSRC channel is modelled by the Nakagami fading channel using the parameters from the Highway 101 bay area [
34]. The association gate
corresponds to the 99-percentile of chi distribution with three degrees of freedom in Equation (
17).
Table 3 also lists the STDs of RSE/LSE measurement noise in the simulation. In this table, the standard deviations of proprioceptive sensors are taken from those of sensor equipments in Table II of paper [
42], while the standard deviations of exteroceptive sensors are the generic parameters of 77-GHz long-range radars in Table IV of paper [
17].
6.1. Ten-Vehicle Mobility Model
We first investigate the performance of LRSF schemes obtained from a randomly chosen vehicle in the TVM. In this section, we also present the estimation accuracy of EKF models in
Section 5.6, marked “EKF-GPS”, “EKF-IVCAL”, “EKF-S-LRSF”, “EKF-ST-LRSF”, and “EKF-LRSF-PM”.
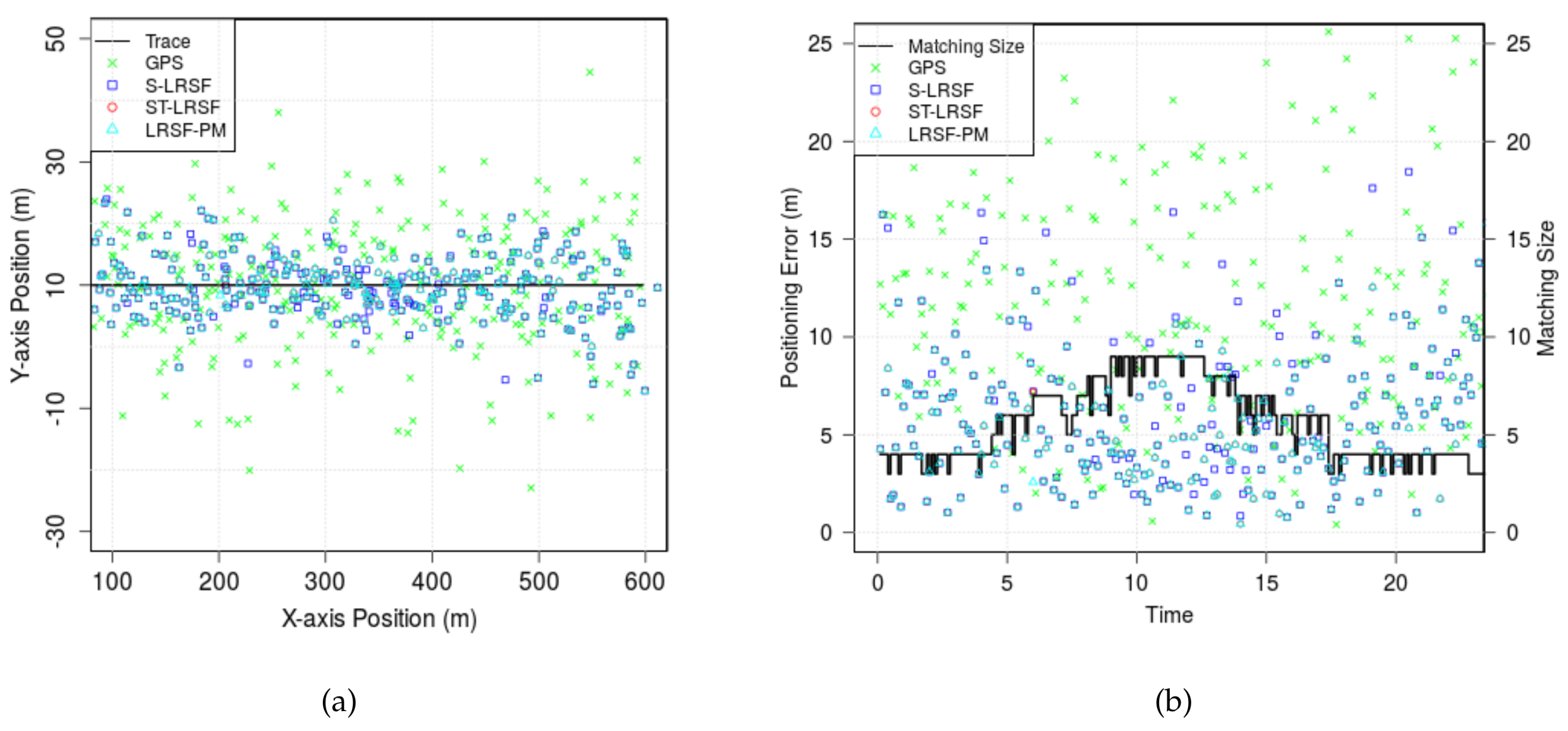
Figure 7 shows the estimates of positioning schemes, when
s,
m,
m, and
m/sec. In
Figure 7a, the trajectory of vehicle is shown in thick black curve, while the position estimates are represented by the marks. It is observed that the position estimates of raw GPS have the highest deviation from the trajectory, while those of three LRSF schemes are relatively close to the trajectory.
Figure 7b shows a solid staircase line for the matching size
and the markers for the positioning errors,
and
, at each frame. We notice that the matching size is initially four, gradually increases up to nine when two vehicle groups are within each other’s sensing range, and finally decreases to four. The occasional drops in the matching size origniate from the obstruction of vehicle sensing and/or the beacon loss in the DSRC channel. We observe that both ST-LRSF and LRSF-PM schemes show the best positioning accuracy among the positioning schemes.
To evaluate the performance of the GSA algorithm, we define the probability of correct matching (PCM) as the probability that there is no mismatched entry in the MWM , i.e., . We notice that the ST-LRSF scheme achieves much higher PCM than the S-LRSF scheme: on average, for the former, and for the latter. From this result, we validate that the temporal CMA of ST-LRSF scheme successfully mitigates the instant randomness of spatial GPS errors.
Figure 8 shows the boxplots for the RMSE of the positioning schemes and their corresponding EKF models in the TVM, where the bottom, the middle, and the top horizontal lines of each box correspond to the 25 percentile, the median, and the 75 percentile of distribution, respectively. The whiskers and the circle mark of each scheme stand for the 99 percentiles and the maximum/minimum values from the simulation results, respectively. We make several observations in this figure: First, the experimental RMSE of raw GPS is
m, which closely matches with parameter
m. Second, the RMSE of optimal IVCAL scheme (
m) is not much better than GPS RMSE because the relative distance estimate based on the received signal strength indicator (RSSI) tends to be highly inaccurate in the Nakagami fading channel [
32,
34]. On the other hand, the PRCoM of LRSF schemes can achieve much lower RMSE compared to the raw GPS errors:
m,
m, and
m for the S-LRSF, ST-LRSF, and LRSF-PM schemes, respectively. Third, the EKF models can significantly reduce the RMSE of positioning schemes: on average,
,
,
, and
reduction for the GPS, S-LRSF, ST-LRSF, and LRSF-PM schemes, respectively. Surprisingly, the RMSE of EKF-IVCAL scheme is
higher than the EKF-GPS RMSE. This is because the position estimate of optimal IVCAL scheme tends to be more biased than the GPS scheme—the average bias error of the former is
m, while that of the latter is
m. For comparison, the average bias errors of S-LRSF, ST-LRSF, and LRSF-PM schemes are
m,
m, and
m, respectively. Finally, the EKF-ST-LRSF scheme achieves the least RMSE (
m), which is approximately
of EKF-GPS RMSE.
6.2. Large-Scale Mobility Model
In this section, we examine the impacts of five parameters on the positioning accuracy of LRSF schemes: STD of raw GPS error, vehicle density, sensing range, sensing period, and vehicle speed. If not otherwise mentioned, the default settings of parameters are s, m, m, m/s, and vehicle density of each direction veh/km.
6.2.1. Standard Deviation of GPS Error
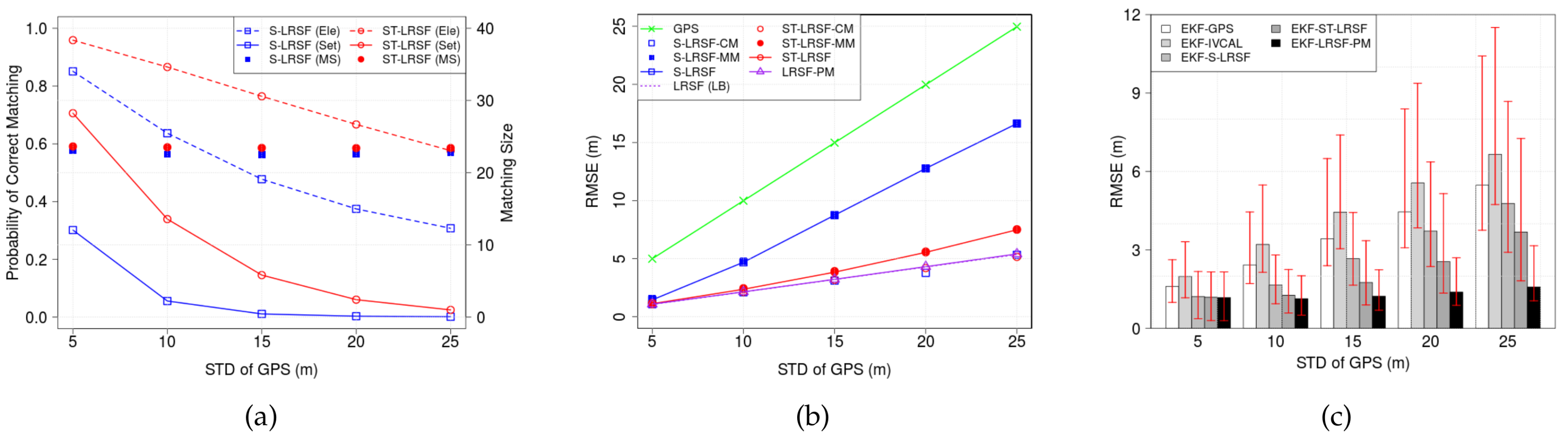
Figure 9 shows (a) the PCM and matching size
, (b) the RMSE of LRSF schemes, and (c) the RMSE of EKT-LRSF schemes, when the STD
of GPS error ranges from 5 m to 25 m. For comparison, the element-wise PCM of
is also shown by the dashed lines in
Figure 9a. For given vehicle density
veh/km and LSR
m, we observe that the matching size is almost the same regardless of the spatial GPS error. On the contrary, both element- and set-wise PCMs decrease with the GPS error. This is because the increased GPS uncertainty incurs more frequent mismatchings, as shown in
Figure 5. We also observe that the ST-LRSF scheme achieves higher PCM than the S-LRSF scheme, which validates that the spatiotemporal dissimilarity metric can effectively mitigate the impacts of instant GPS randomness.
In
Figure 9b, we show the RMSE of three LRSF schemes. For comparison, we also plot the RMSE of correct matching (CM)
with hollow marks, mismatching (MM)
with filled marks, and theoretical LB
with dotted lines. We make four observations: First, the RMSE of raw GPS is the highest almost the same as
. Second, the RMSE of ST-LRSF scheme is the lowest and no greater than
of raw GPS RMSE. Third, the RMSEs of S-LRSF-CM, ST-LRSF-CM, and LRSF-PM are almost the same as the RMSE of theoretical LB which is determined by the cardinality of MWM
, while the RMSE of S-LRSF-MM is much higher than that of ST-LRSF-MM. We can infer that the spatiotemporal dissimilarity metric not only increases the PCM but also decreases the impacts of mismatching term in Equation (
26). Fourth, the RMSE of each LRSF scheme can be seen as the weighted RMSE sum of CM and MM: If the PCM is high, all RMSEs are close to the RMSE of theoretical LB, but the RMSE of each LRSF scheme quickly deviates from the RMSE of theoretical LB due to the fast decrease of the PCM.
Figure 9c shows the RMSEs of EKF-GPS, EKF-S-LRSF, EKF-ST-LRSF, and EKF-LRSF-PM schemes, where the bar corresponds to the average RMSE, and the bottom and the top of red whisker represent the 5 percentile and the 95 percentile of RMSE, respectively. We observe that the RMSE of EKF-GPS scheme is proportional to the GPS error, while that of EKF-LRSF-PM scheme is almost the same thanks to the PRCoM scheme. We also notice that, as the GPS error increases, the ratio of EKF-ST-LRSF RMSE to EKF-LRSF-PM RMSE in
Figure 9c becomes higher than that of ST-LRSF RMSE to LRSF-PM RMSE in
Figure 9b. This is because the EKF model in
Section 5.6 does not take into account the error from mismatched entries in Equation (
26). As a result, the Kalman gain
in Equation (
28) is not optimal for both S-LRSF and ST-LRSF schemes when the PCM is low. However, we still observe that the RMSE of EKF-ST-LRSF scheme is
higher than the EKF-LRSF-PM RMSE on average, but is
of EKF-GPS RMSE and
of EKF-S-LRSF RMSE.
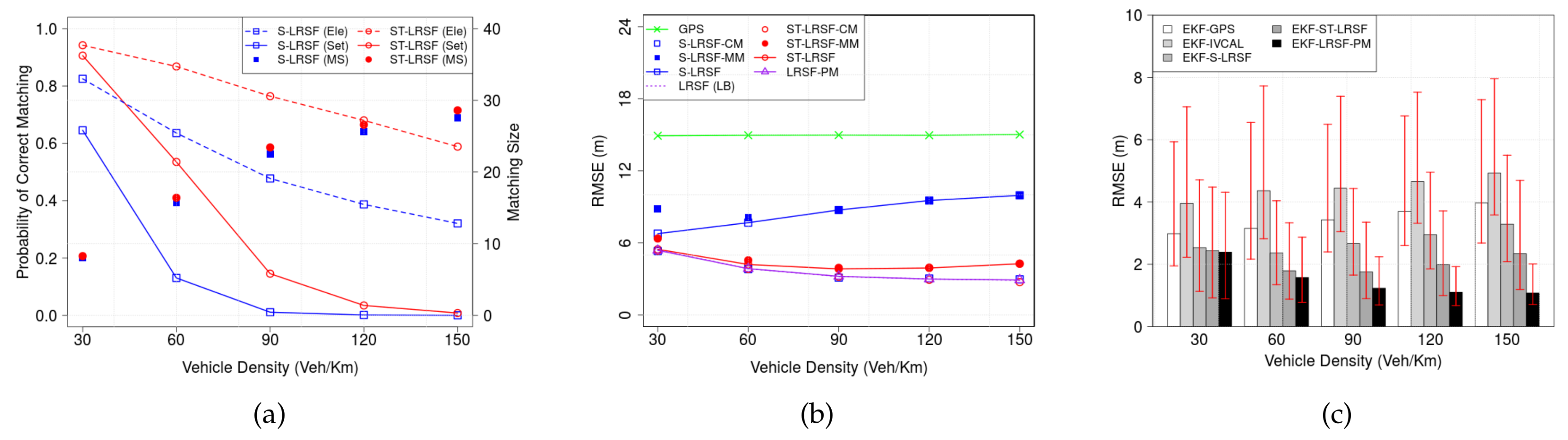
6.2.2. Vehicle Density
Figure 10 shows (a) the PCM and matching size, (b) the RMSE of LRSF schemes, and (c) the RMSE of EKT-LRSF schemes, when vehicle density
ranges from 30 veh/Km to 150 veh/Km. In
Figure 10a, the matching size increases sublinearly with vehicle density due to the obstruction. From the LLN, the RMSE of theoretical LB is inversely proportional to the square root of matching size, as shown in
Figure 10b. On the contrary, the RMSE of raw GPS can be seen as a horizontal line, because the position uncertainty of standalone GPS device is independent of vehicle density. We also make similar observations: when the PCM is high, the RMSE of each LRSF scheme is close to that of correct matching, but it approaches the RMSE of mismatching as the PCM decreases with vehicle density. Since the inter-vehicle distance is inversely proportional to vehicle density, the increase of vehicle density results in more frequent mismatchings. Although the RMSE of ST-LRSF scheme is the lowest and close to the RMSE of theoretical LB, the RMSE of EKF-ST-LRSF scheme also deviates from that of EKF-LRSF-PM scheme at high vehicle density whose PCM is close to zero. Finally, the average EKF-ST-LRSF RMSE
higher than the EKF-LRSF-PM RMSE, but is
of EKF-GPS RMSE and
of EKF-S-LRSF RMSE.
6.2.3. Sensing Range
Figure 11 shows (a) the PCM and matching size, (b) the RMSE of LRSF schemes, and (c) the RMSE of EKT-LRSF schemes, when LSR
ranges from 150 m to 250 m. In
Figure 11a, we see that the matching size increases with LSR, which slightly reduces the RMSE of corresponding LBs in
Figure 11b. We also observe that the set-wise PCM slightly decreases with LSR, which may result in the increase of RMSE in
Figure 11b. Among these two conflicting factors, the RMSE in
Figure 11b shows that the former seems to be more significant than the latter. We also notice that the ST-LRSF scheme achieves the lowest RMSE, which is almost close to that of LRST-PM scheme. Finally, the EKF-ST-LRSF RMSE is
higher than the EKF-LRSF-PM RMSE, but is
of EKF-GPS RMSE and
of EKF-S-LRSF RMSE.
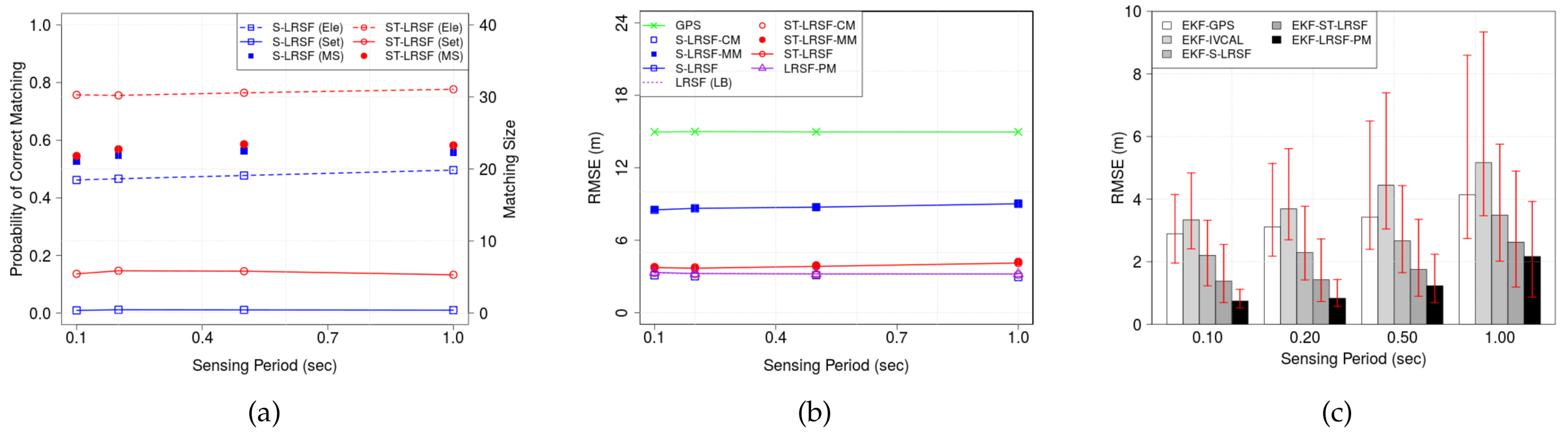
6.2.4. Sensing Period
Figure 12 shows (a) the PCM and matching size, (b) the RMSE of LRSF schemes, and (c) the RMSE of EKT-LRSF schemes, when sensing period
T ranges from
s to
s. In
Figure 12a, we observe that the matching size slightly increases with sensing period because of the reduced DSRC channel congestion, which results in less number of lost beacons. This phenomenon leads to a slight increase in the element-wise PCM of both LRSF schemes. In
Figure 12b, the RMSE of each LRSF scheme slightly increases with sensing period, which means that the impact of increased matching size is almost negligible. We also make three observations: first, both the raw GPS error and the LBs have a constant value because they are independent of sensing period; second, the RMSE of ST-LRSF scheme is the least and close to the corresponding LB on average. Finally, the EKF-ST-LRSF RMSE is
higher than the EKF-LRSF-PM RMSE but is about
of EKF-GPS RMSE and
of EKF-S-LRSF RMSE.
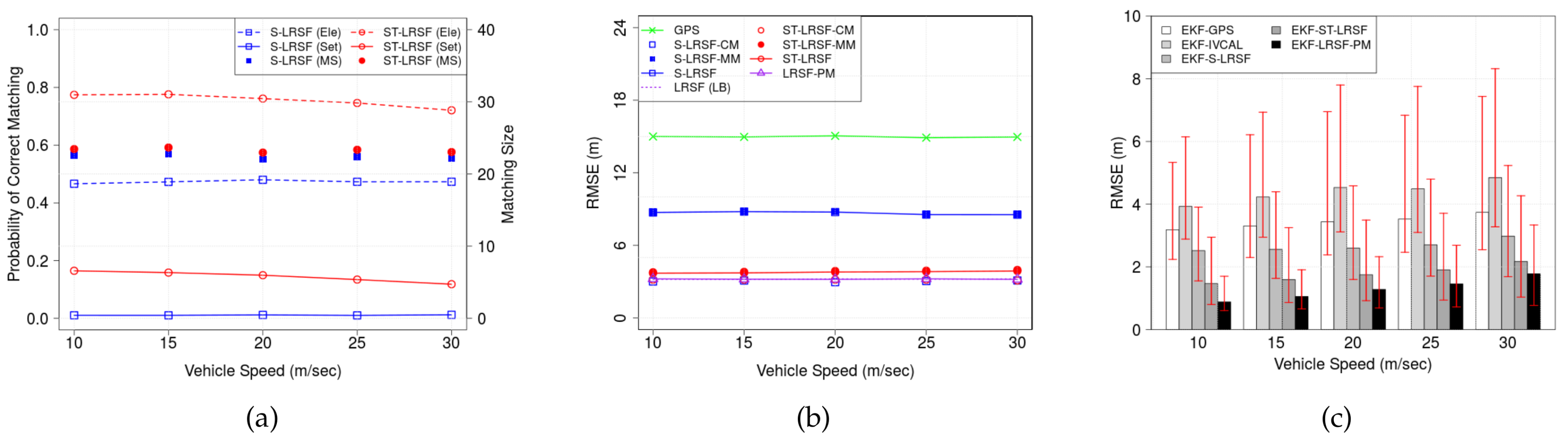
6.2.5. Vehicle Speed
Figure 13 shows (a) the PCM and matching size, (b) the RMSE of LRSF schemes, and (c) the RMSE of EKT-LRSF schemes, when vehicle speed
ranges from 10 m/s to 30 m/s. In
Figure 13a, the PCM of ST-LRSF scheme slightly decreases with vehicle speed due to the reduced temporal correlation originating from vehicle dynamics, while that of S-LRSF scheme is almost a constant. In addition, a high vehicle speed may increase multipath fading, which results in a slight decrease of matching size. The mixture of above factors leads to the opposite trend in both LRSF schemes: The RMSE of ST-LRSF scheme slightly increases with vehicle speed, while that of S-LRSF scheme slightly decreases in
Figure 13b. We also observe that the EKF-ST-LRSF RMSE is
higher than the EKF-LRSF-PM RMSE, but is
of EKF-GPS RMSE and
of EKF-S-LRSF RMSE.
From all aforementioned results, we conclude that both the basic and the EKF ST-LRSF schemes achieve the best RMSE performance for a wide range of parameters, when compared with the corresponding GPS, IVCAL, and S-LRSF schemes.
7. Conclusions
In this paper, we present the framework of spatiotemporal local-remote sensor fusion scheme that can reduce the random GPS error by comparing the relative state measured at the on-board radar with the absolute state received from neighbor vehicles. The ST-LRSF scheme formulates the state association problem between both estimates of vehicle state into the MWM problem in a bipartite graph, where the edge cost represents the spatiotemporal dissimilarity. Based on the MWM, we also present the PRCoM scheme, where the resulting position uncertainty is reduced by aggregating the random GPS errors of all vehicles in the MWM. Assuming that every matched entry in the MWM is a correct matching, we prove that the position accuracy is improved by the square root of matching size. We also present an EKF model, where the output of PRCoM scheme is used as the measurement input of EKF. Numerical results show that the ST-LRSF scheme can achieve the best positioning performance, regardless of raw GPS error, vehicle density, LSR, sensing period, and vehicle speed.
A generalization of the ST-LRSF framework to the positioning reference of a real vehicle may require a few directions for future work. First, considering the current penetration ratio of the automotive radars, further research is necessary to design an extended ST-LRSF scheme by which a vehicle without radar can improve its position accuracy based on the sharing of LSEs through V2X communications. Since the bias error in the position estimate may degrade the performance of (E)KF, an efficient technique for GPS bias cancellation in Equation (
3) has to be studied as further work. Next, this paper presents a simple GSA algorithm for the matching between LSE and RSE, but the numerical results show that an improved sensor-data association algorithm may additionally reduce the RMSE of EKF-ST-LRSF scheme approximately up to
. Finally, this work proposes the PRCoM scheme to reduce the RMSE of pivot vehicle based on the assumption that the GPS error of each vehicle has the same STD, but a new positioning refinement model relaxing this assumption should also be investigated as further work.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}