A Teleo-Reactive Node for Implementing Internet of Things Systems



Abstract
:
1. Introduction
2. The Teleo-Reactive Approach
3. Related Work
4. The TR Node
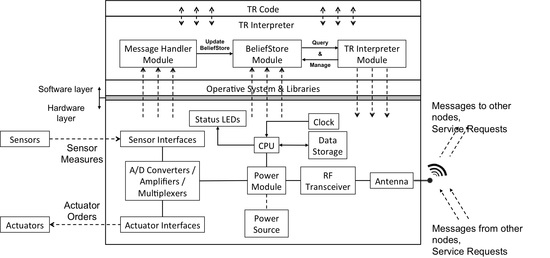
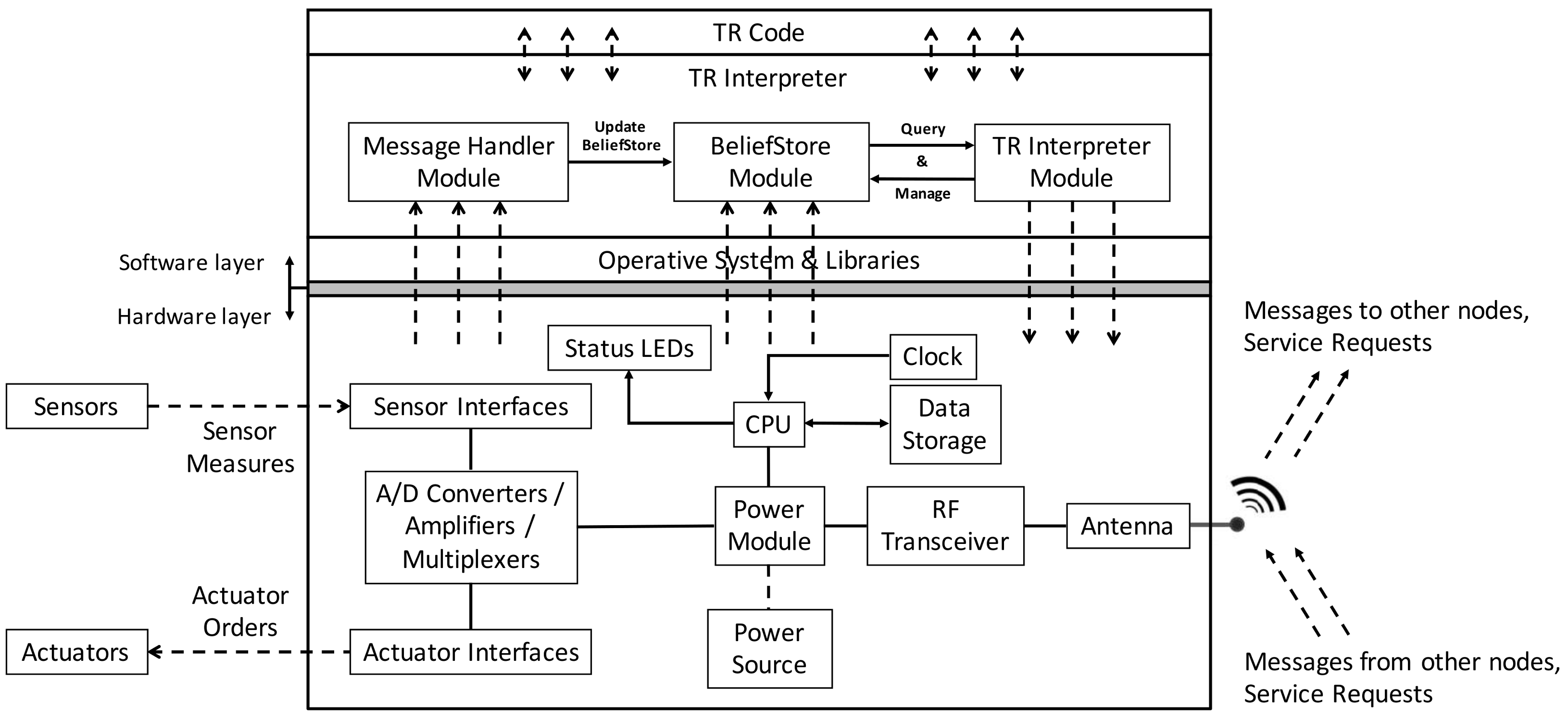
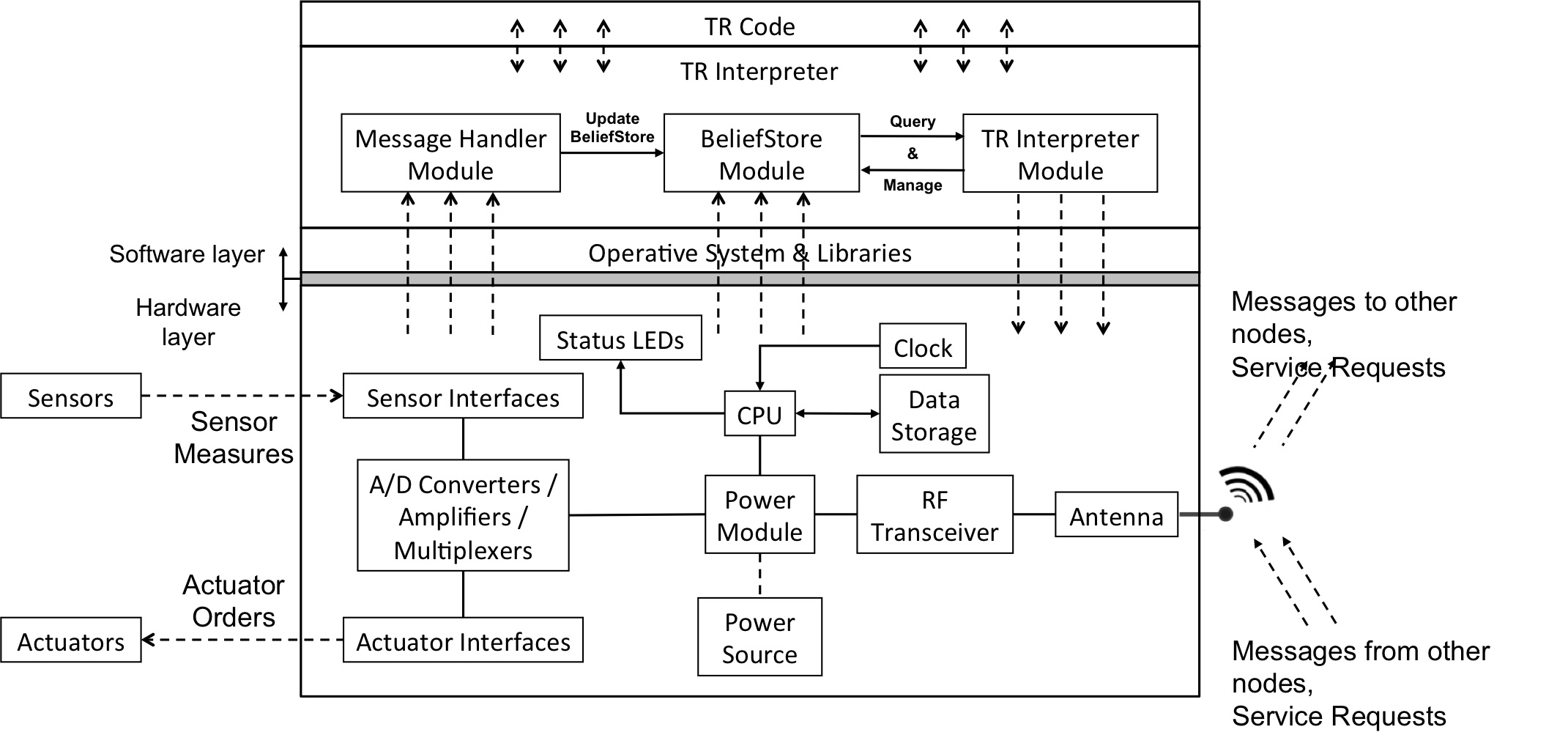
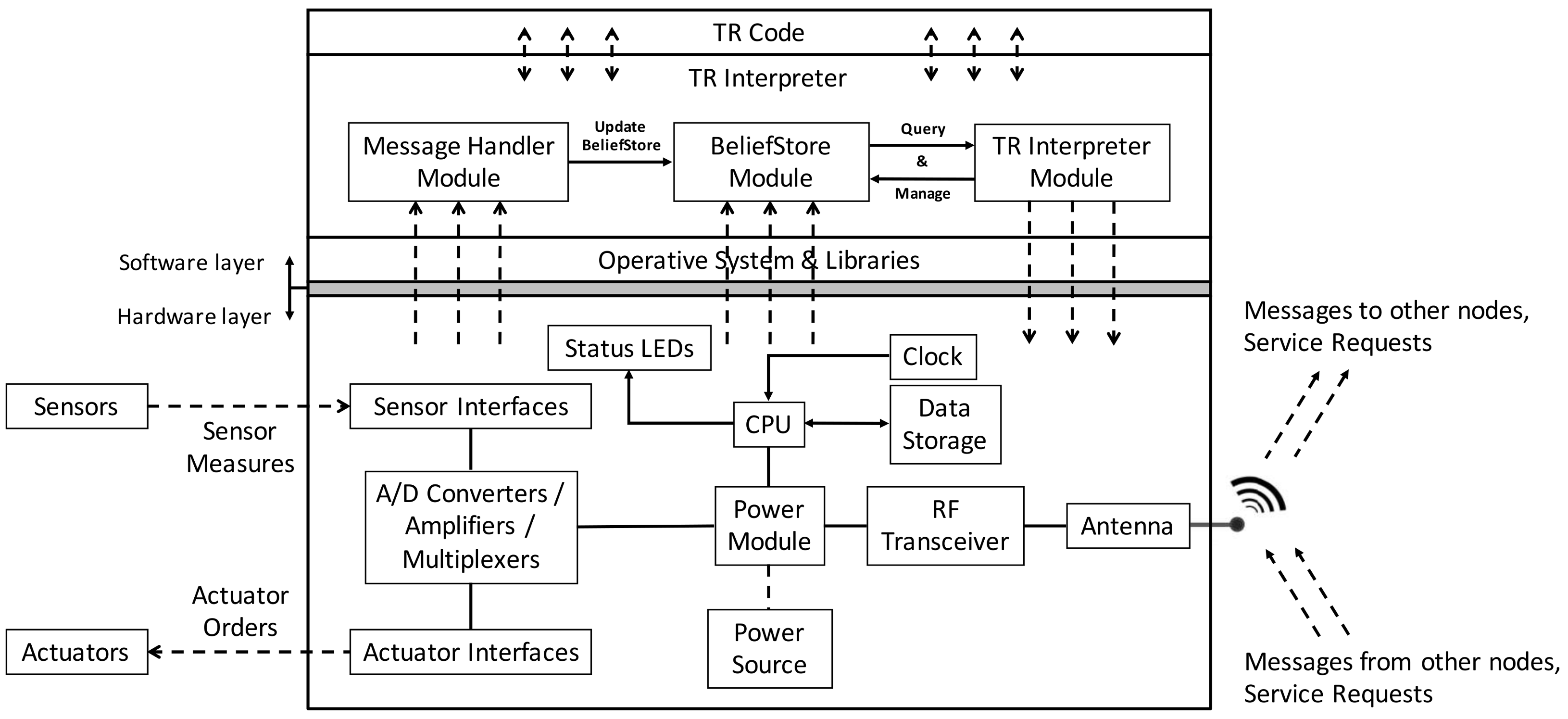
4.1. Hardware, Software and Functional Modes
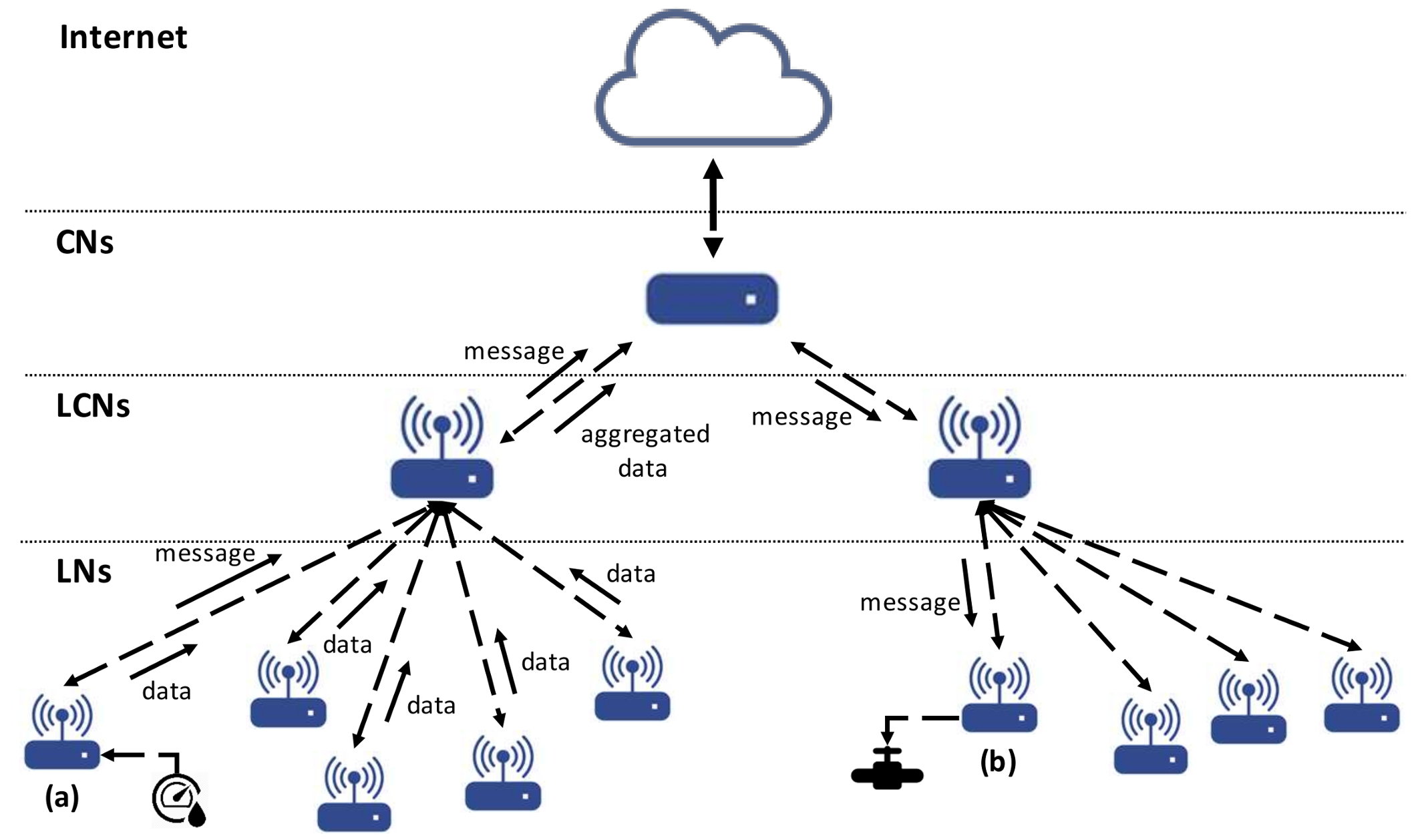
- Local Node (LN): When configured as an LN, the TR node assumes its simplest behavior and lowest hierarchical position in the TR network. In this situation, its main function is to sense the environment and to react accordingly. The node can also exchange messages with other nodes or ask for web services, although this is not its main purpose. It is a final node in the physical domain.
- Local Coordination Node (LCN): Configured as an LCN, the TR node adopts a middle hierarchical level in the TRIoT architecture. With this setup, the main purpose of the node is to coordinate the different LN networks and to act as a broker with external agents, services or other LCNs. Although it is not a must, sensing and actuating capabilities are also possible.
- Coordination Node (CN): This configuration places the node at the top of the hierarchy. When configured in this way, the node has no sensing or actuating capabilities and focuses its behavior solely on coordinating the different LCN networks, on serving as a broker with external agents, services or other CNs, and on connecting to the Internet. These nodes may also be virtually implemented and deployed instead of physically by using cloud-computing facilities.
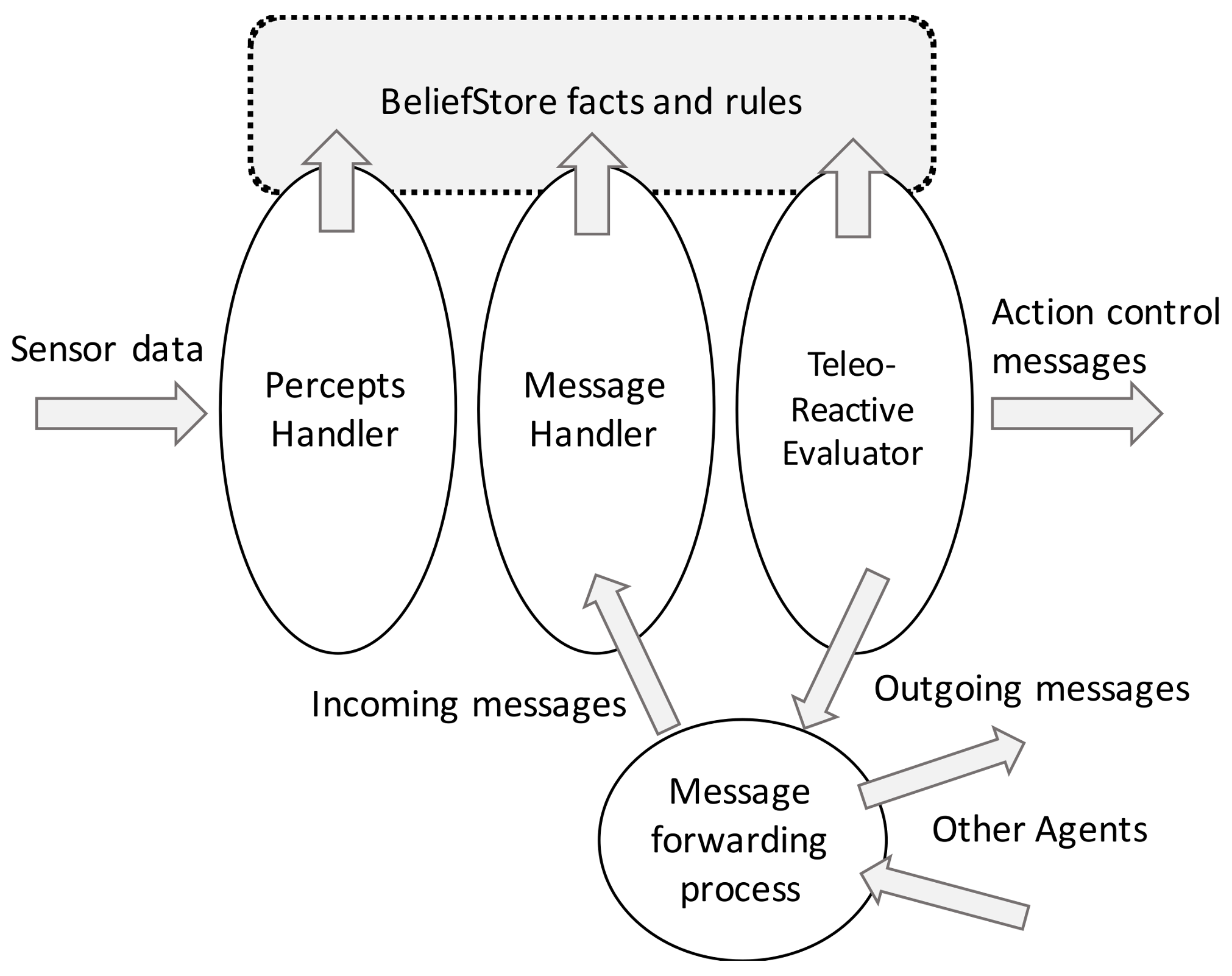
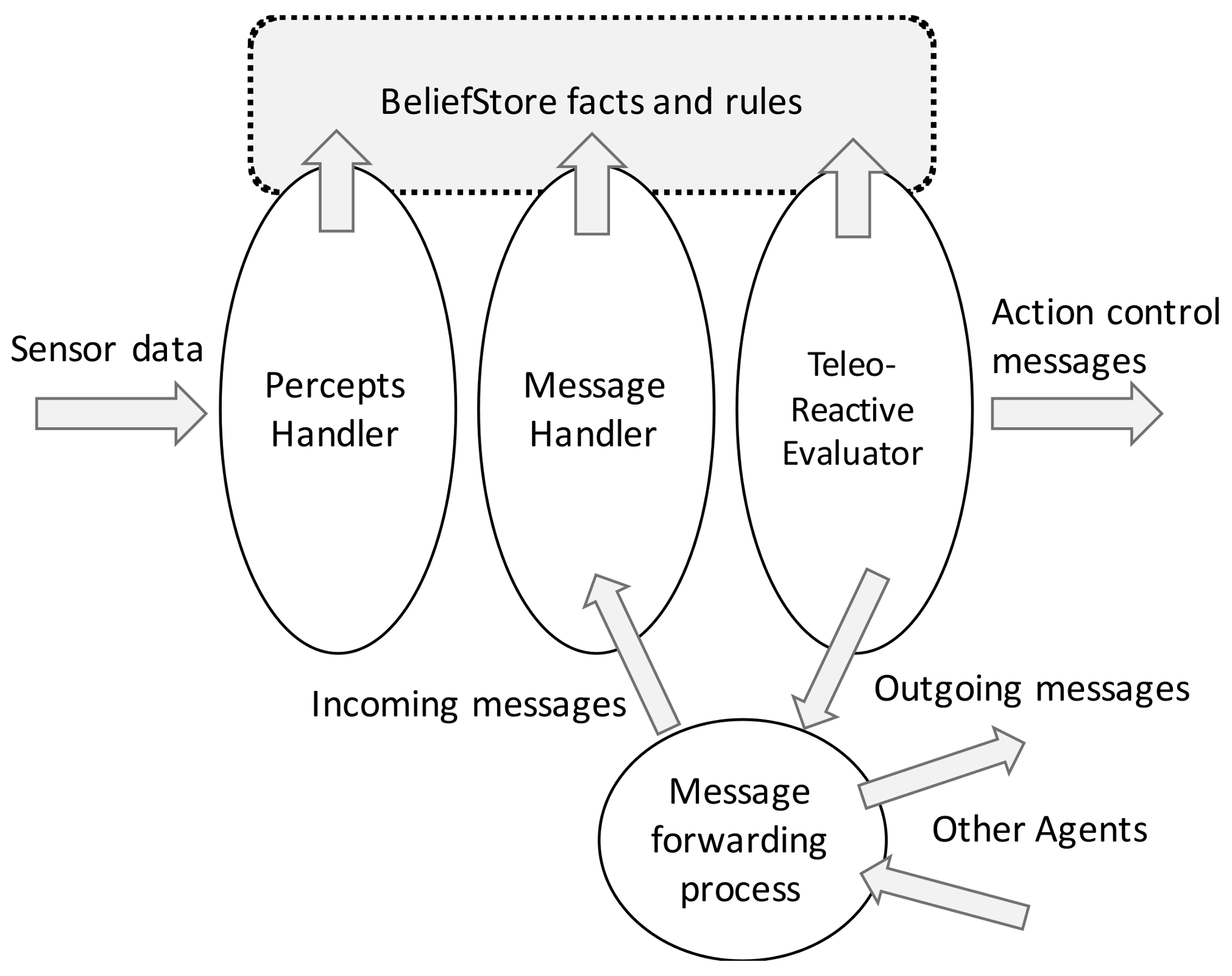
4.2. TR Interpreter
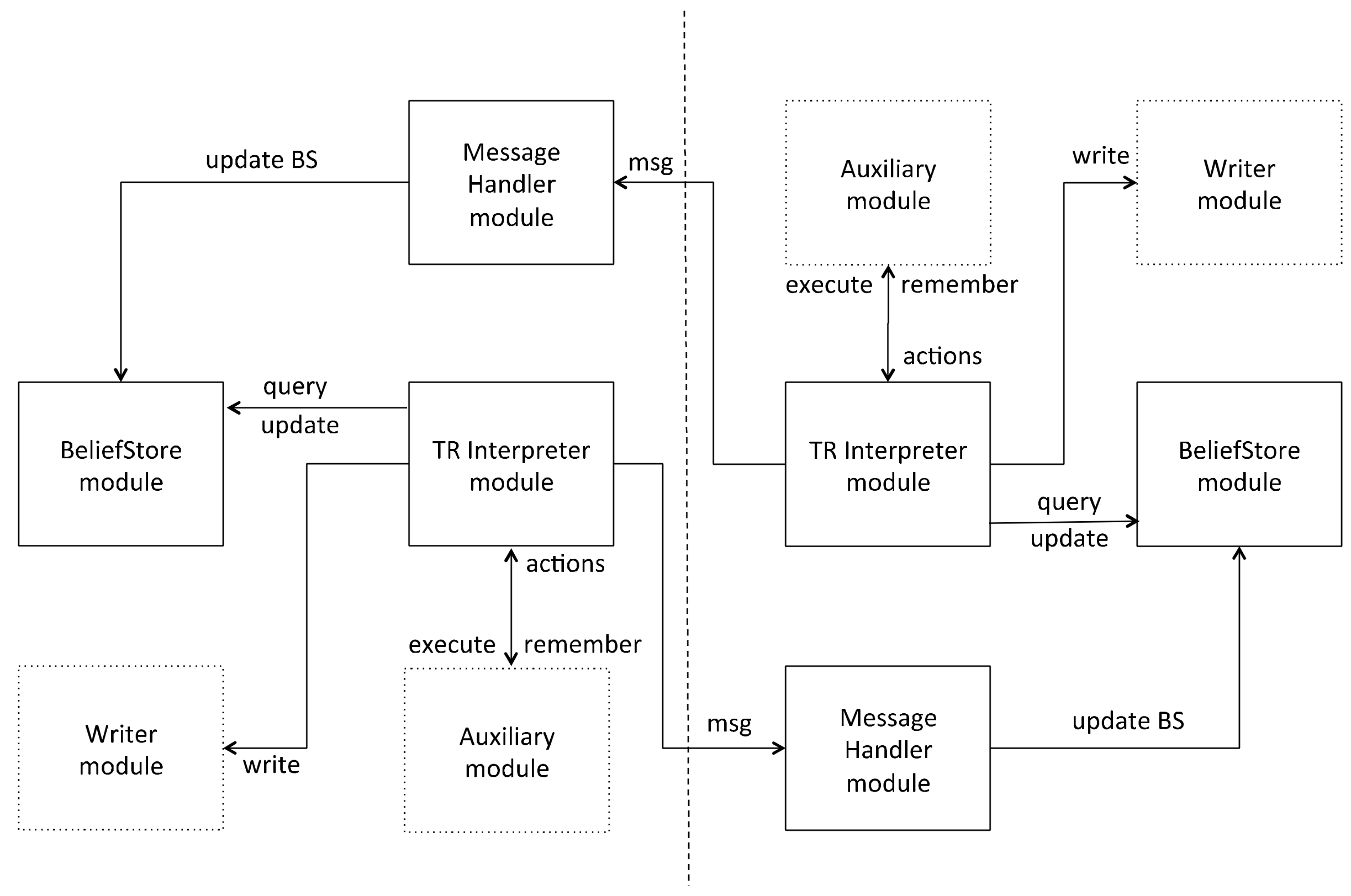
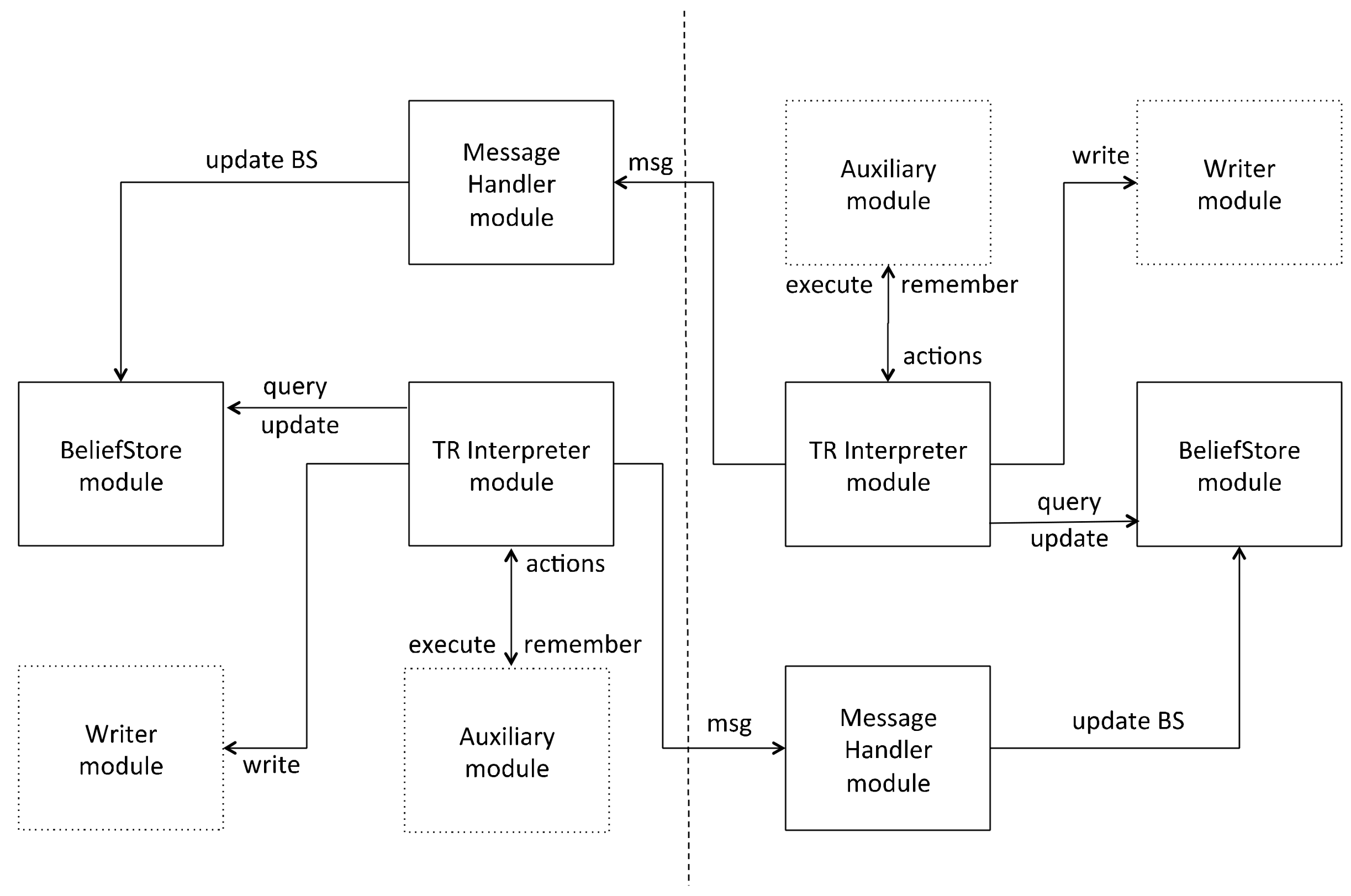
4.2.1. TR Interpreter Module
- First, the main structure of the TR program is created in Erlang by considering the goals. For each goal, the interpreter generates a new entry within the Erlang “case ... of” structure, as shown in Table 3. Thanks to the Erlang pattern matching mechanism, by which variables are bound to values by the evaluation of the conditions from top to bottom, the execution of the first satisfied condition is achieved.
- If the condition is expressed on a percept or belief, then the Erlang condition checks if the percept/belief exists in the BS by using the function bs:is_belief, defined in the BeliefStore module. This function returns a true or false value when a belief exists or not, respectively (see Table 4).
- If the condition compares a variable/belief/percept with a certain value or arithmetic expression, the implementation is made by using the function auxiliary:compare_value(Key, KeyList, Mode, Value), where Key is the belief/percept that is going to be compared and KeyList is the list where the belief/percept is stored. For variables, the function used is bs:get_belief, where bs is the instance of the BeliefStore module (see example in Table 6).
- 2.
- The second step is concerned with data management, and it consists of updating the variables/beliefs of the BS as a consequence of the execution of a rule. This process is accomplished by the function bs:update_belief (see Table 8).
- 3.
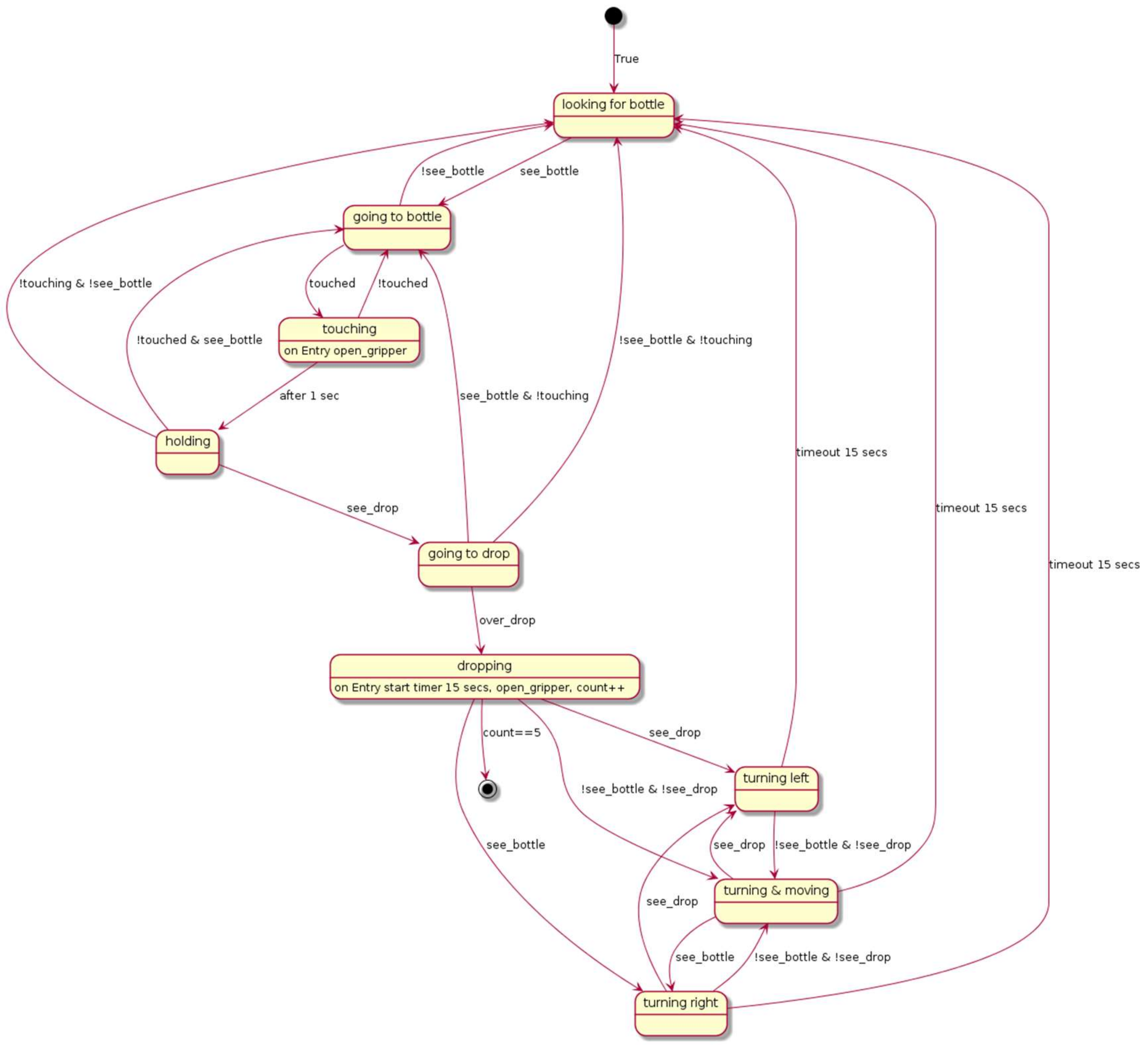
- The third step of the algorithm consists of remembering and forgetting beliefs as stated in the execution of the rules (for details see TeleoR [11]). These instructions are accomplished with the auxilary:remember(Belief,Time) function, the bs:remove_belief (which removes the whole belief set), and the bs:remove_one_belief function (which removes a value from a multi-value belief). For example, the robot could be able to see other robots and remember this fact with the ‘seen’ belief and for fifteen seconds.
- 4.
- The last step consists of managing the sending and reception of messages to/from other agents. The case study includes sending a message to the other robot with the number of bottles collected (count(_collected) to OtherAg). The message handler section in the TR program is in charge of processing the incoming messages, in this case storing the value in the _other_collected variable, which is used as part of the condition to stop the task. Table 10 shows the equivalence between both languages.
4.2.2. BeliefStore Module
4.2.3. Auxiliary Module
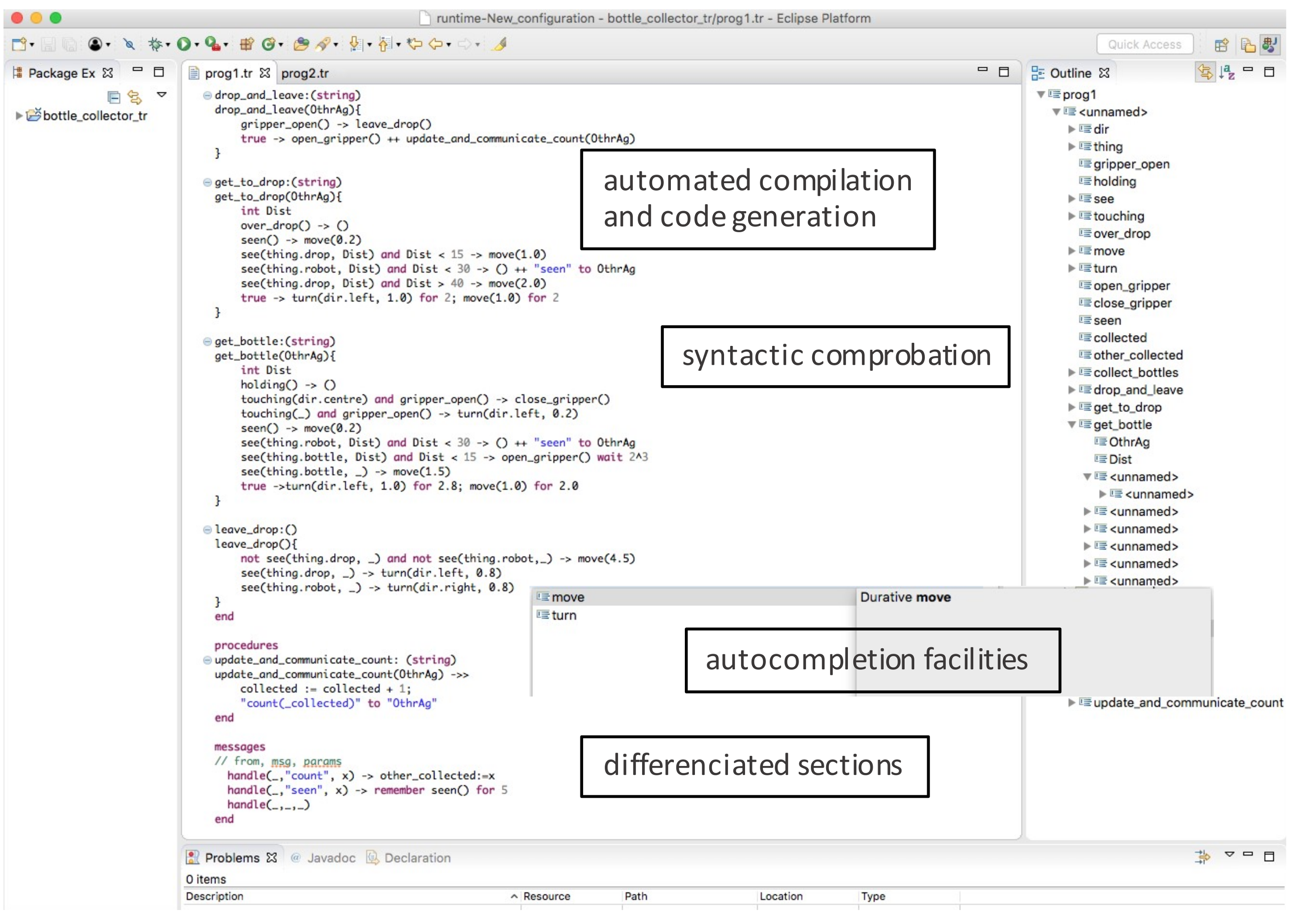
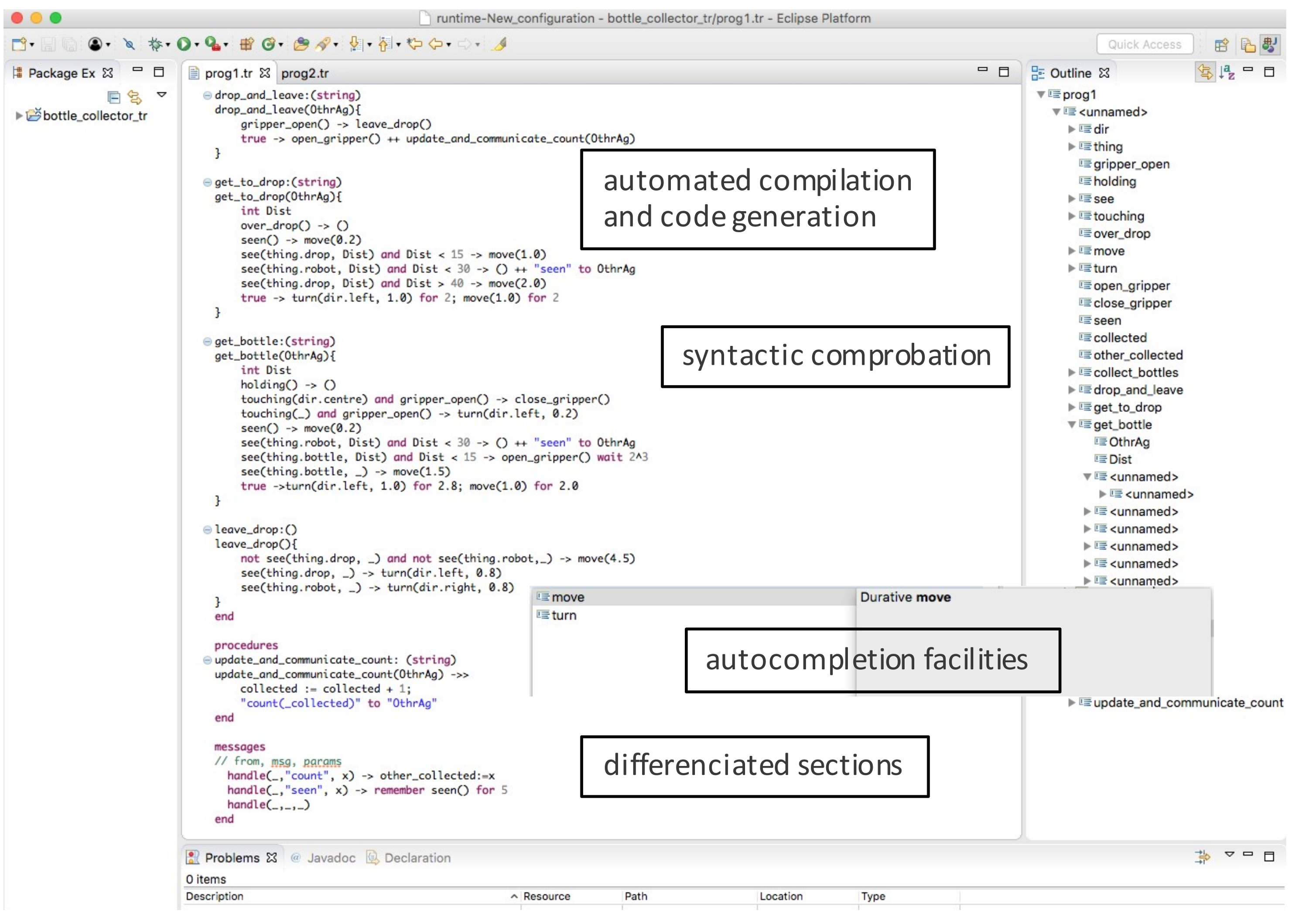
4.2.4. An MDE Based TR Editor
5. Validation of the Approach: Deployment on a Raspberry Pi
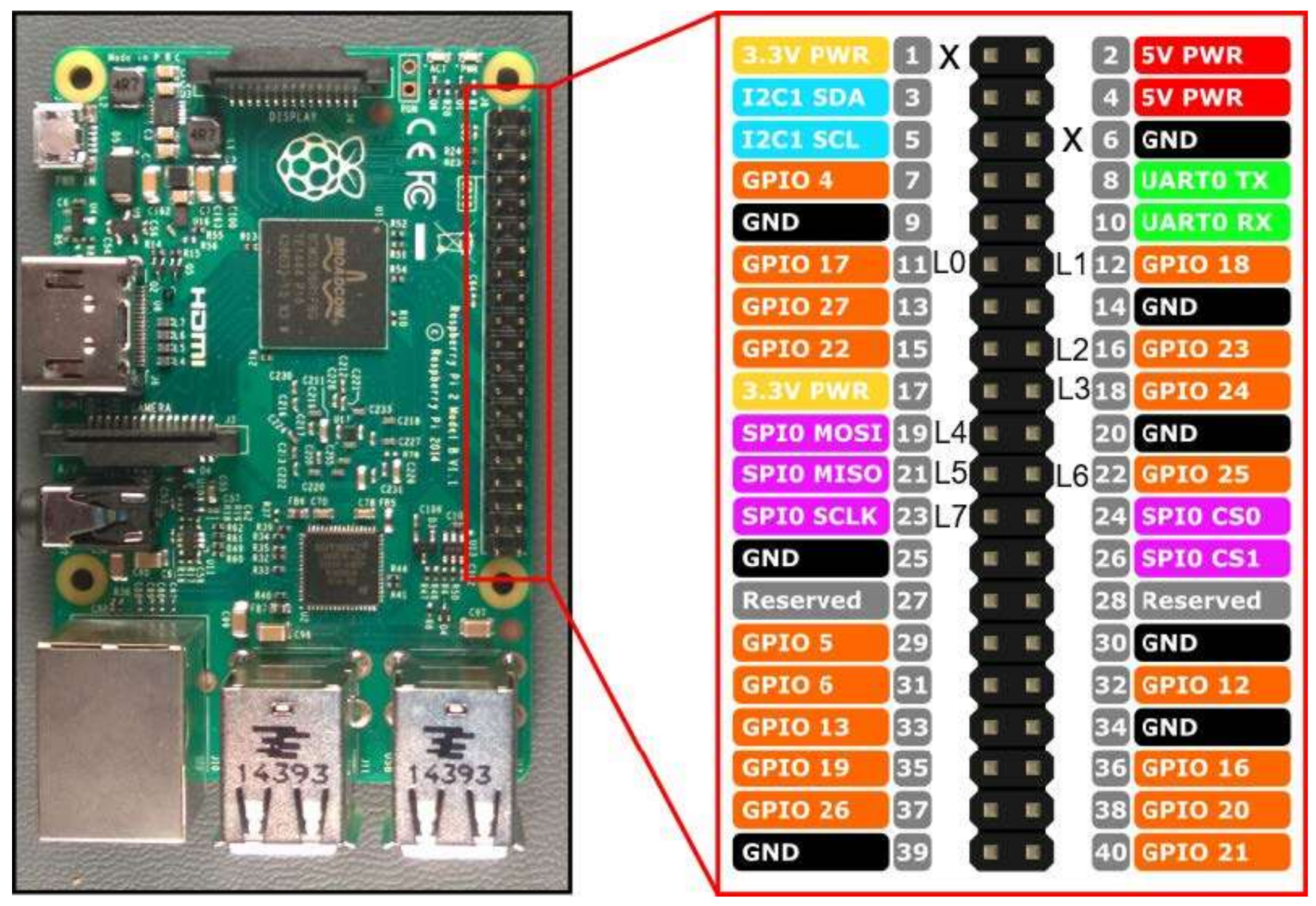
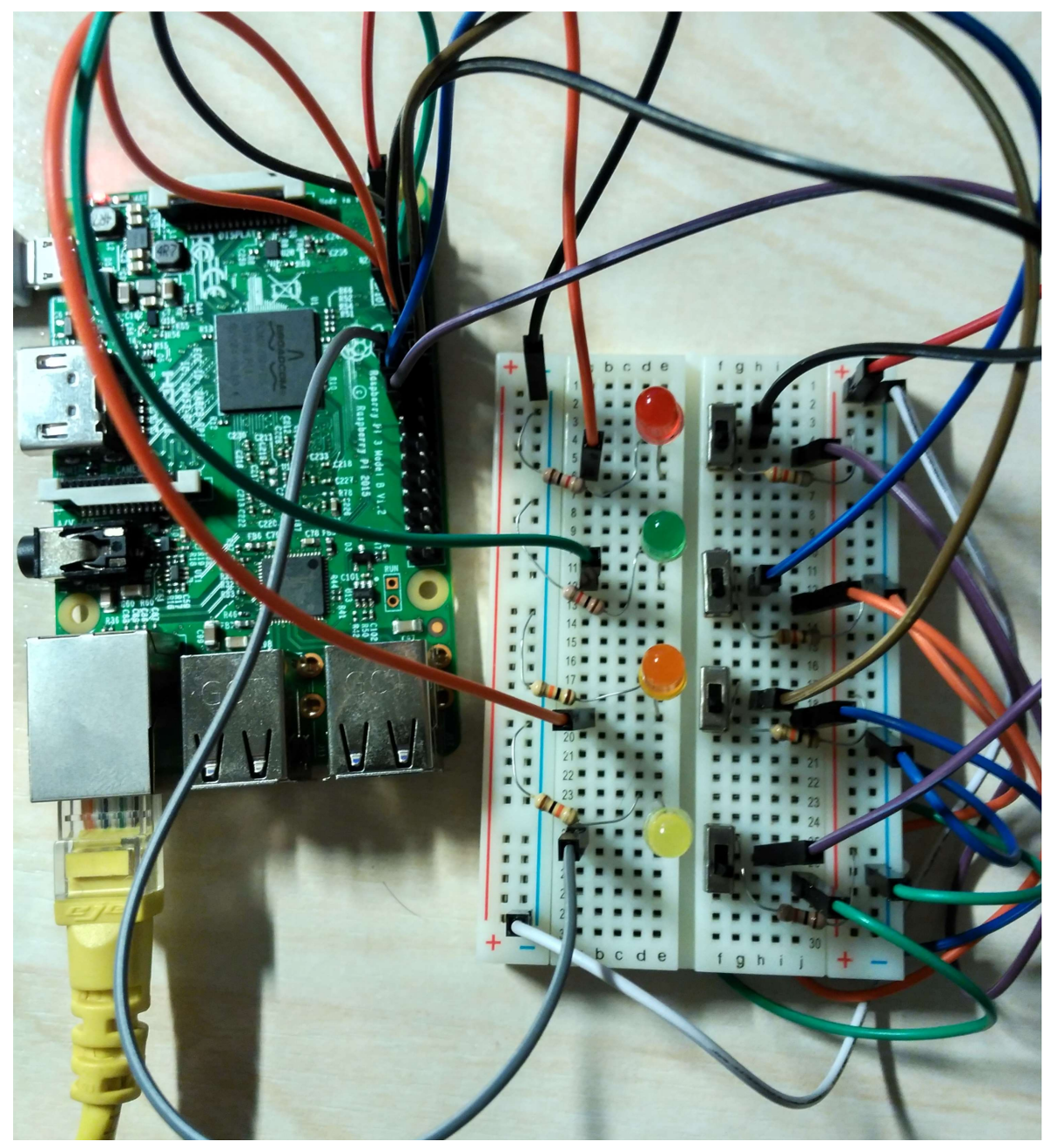
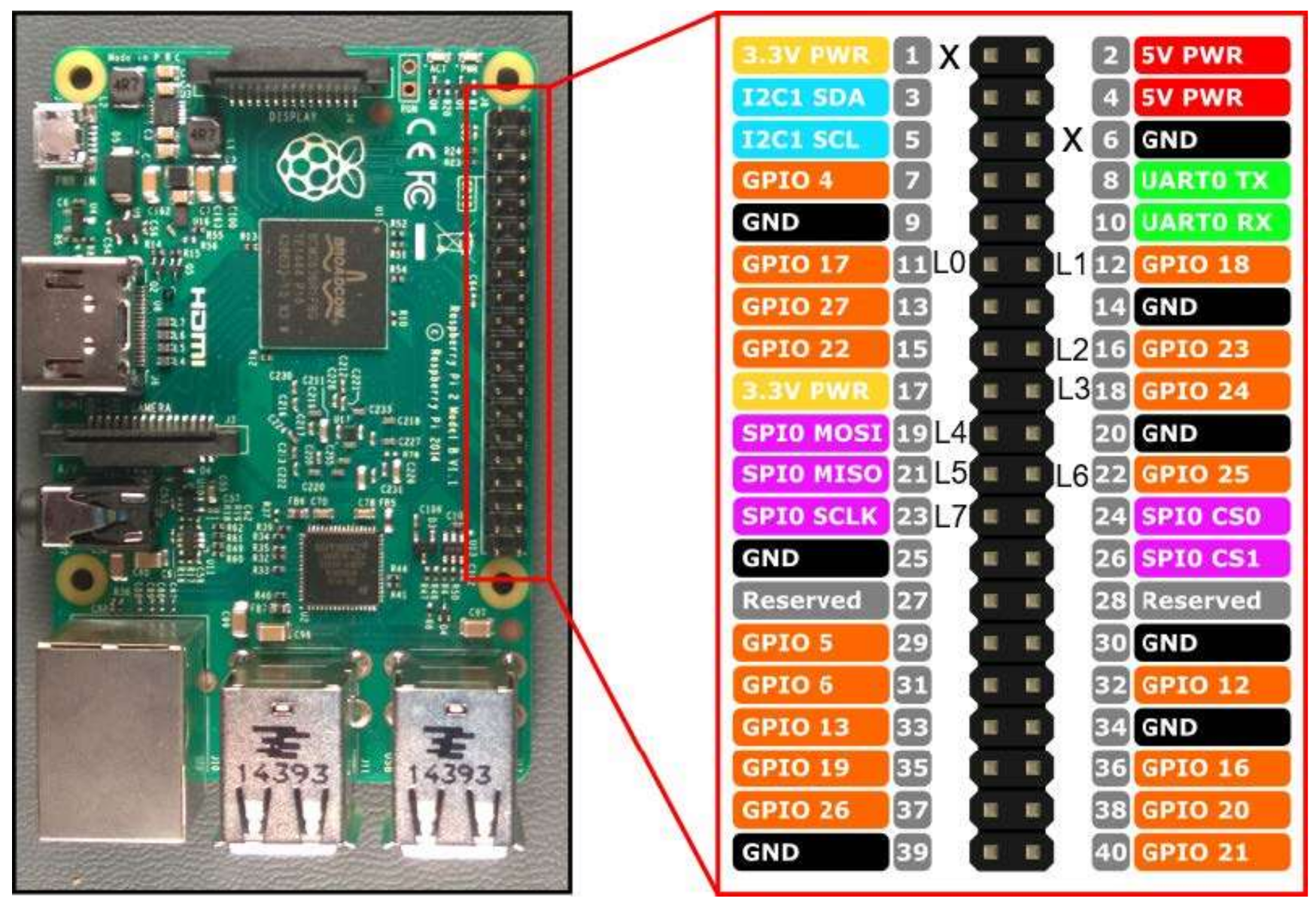
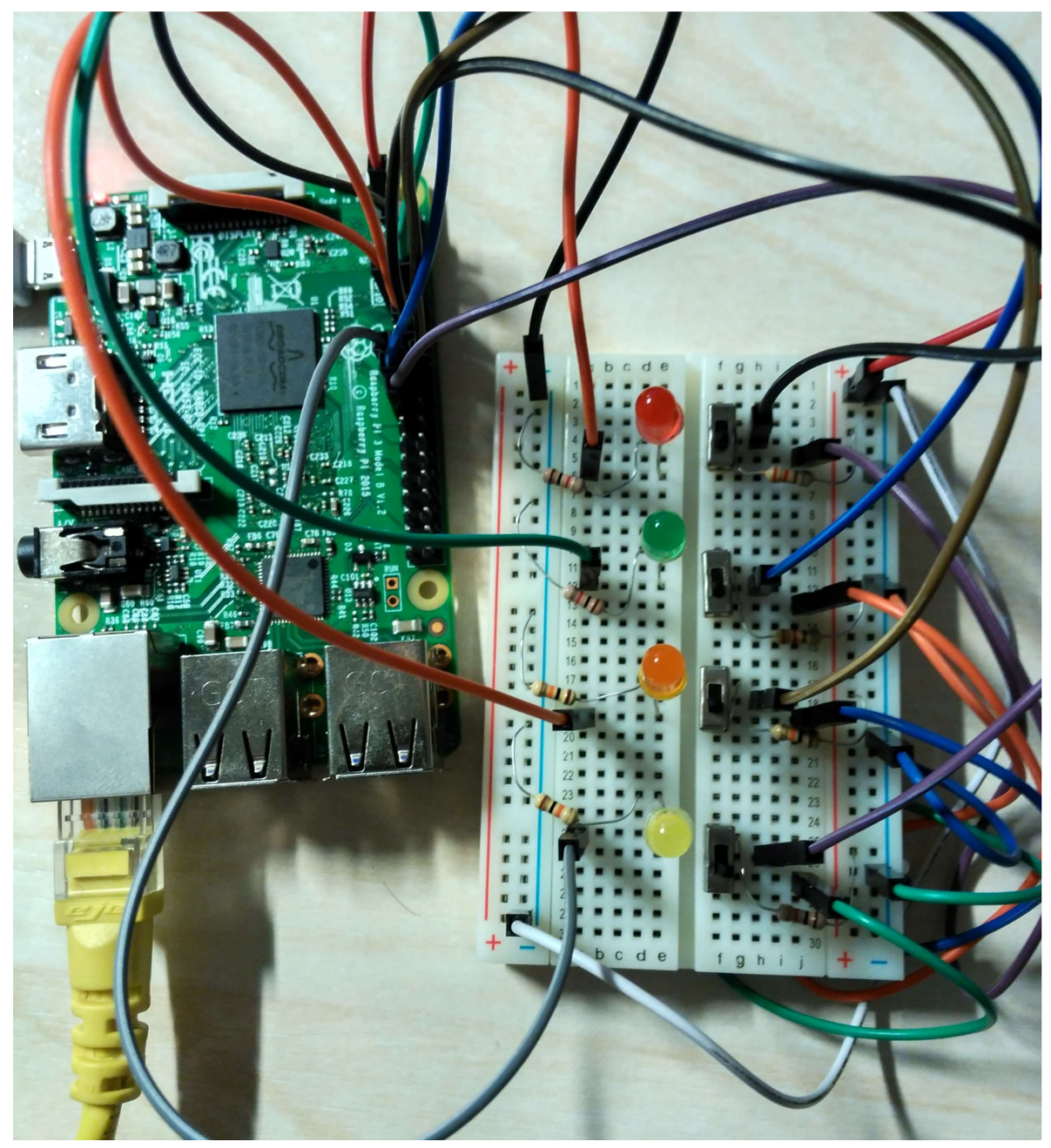
5.1. Hw/Sw Implementation
5.2. Comparative Execution Results
6. Discussion
leave_drop(){
not see(drop) & not see(bottle) ~> move(1.0)
see(drop) ~> turn(left, 0.8)
see(bottle) ~> turn(right, 0.8)
}
to
leave_drop(){
not see(drop) & not see(bottle) ~> move(1.0)
see(bottle) ~> turn(right, 0.8)
see(drop) ~> turn(left, 0.8)
}
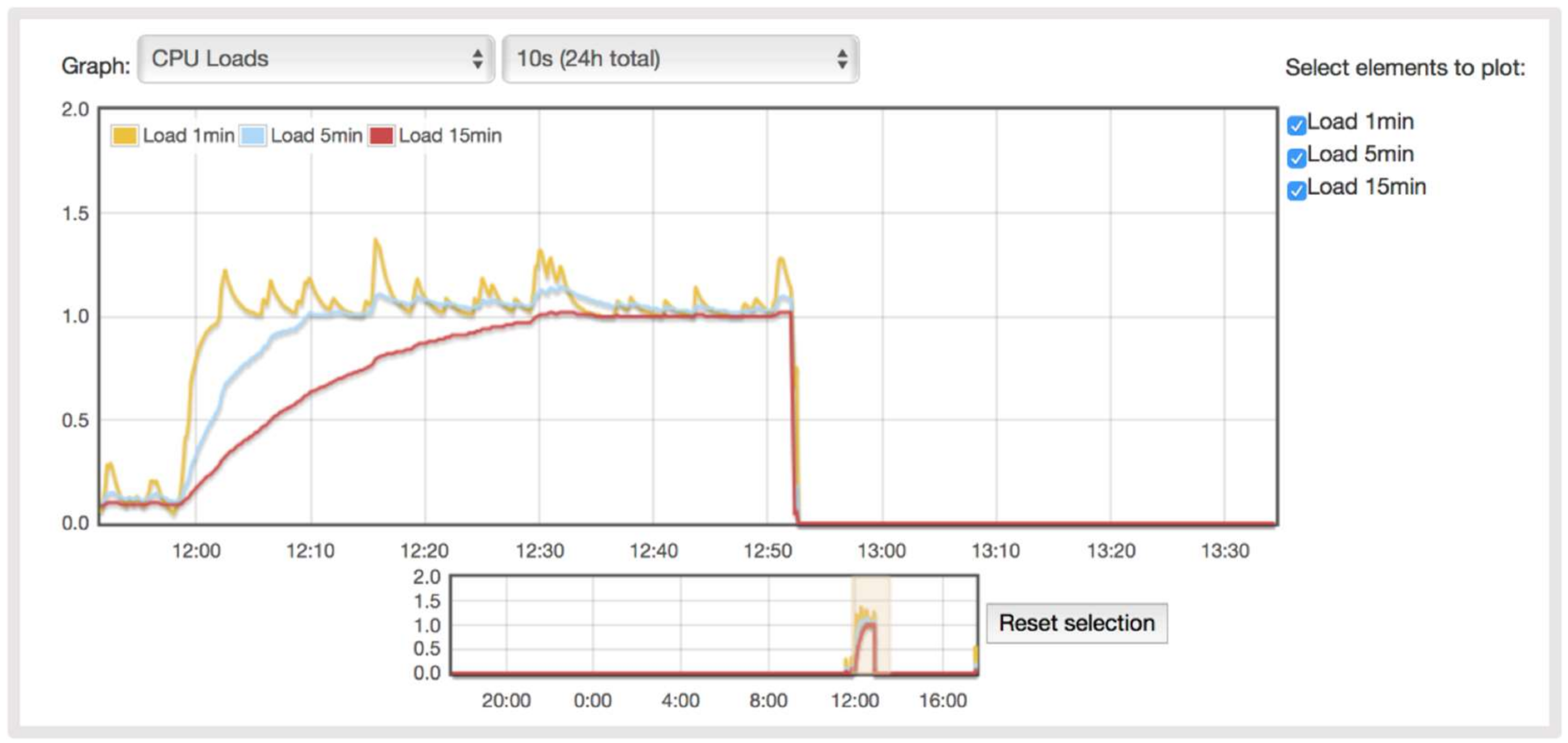
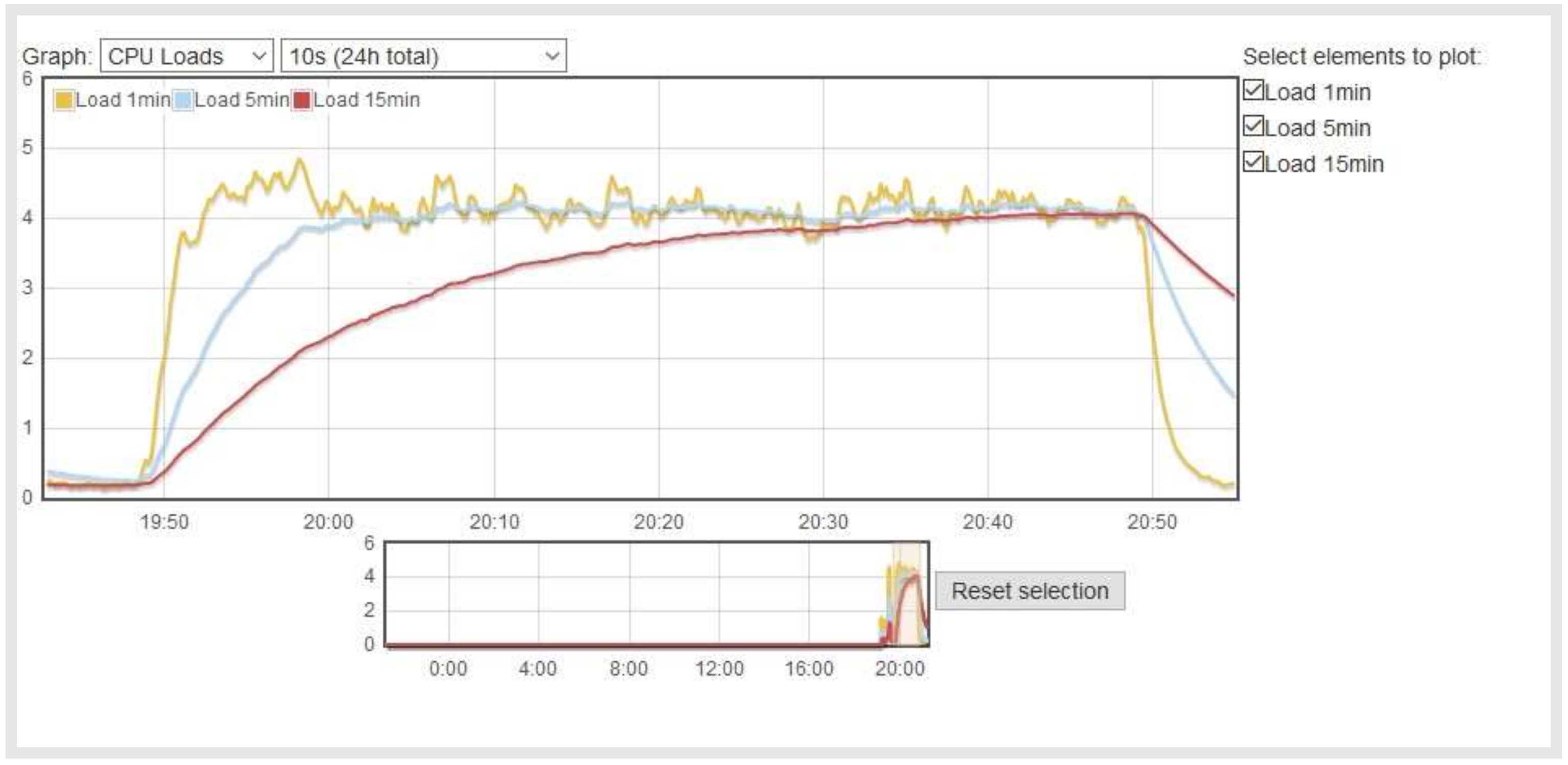
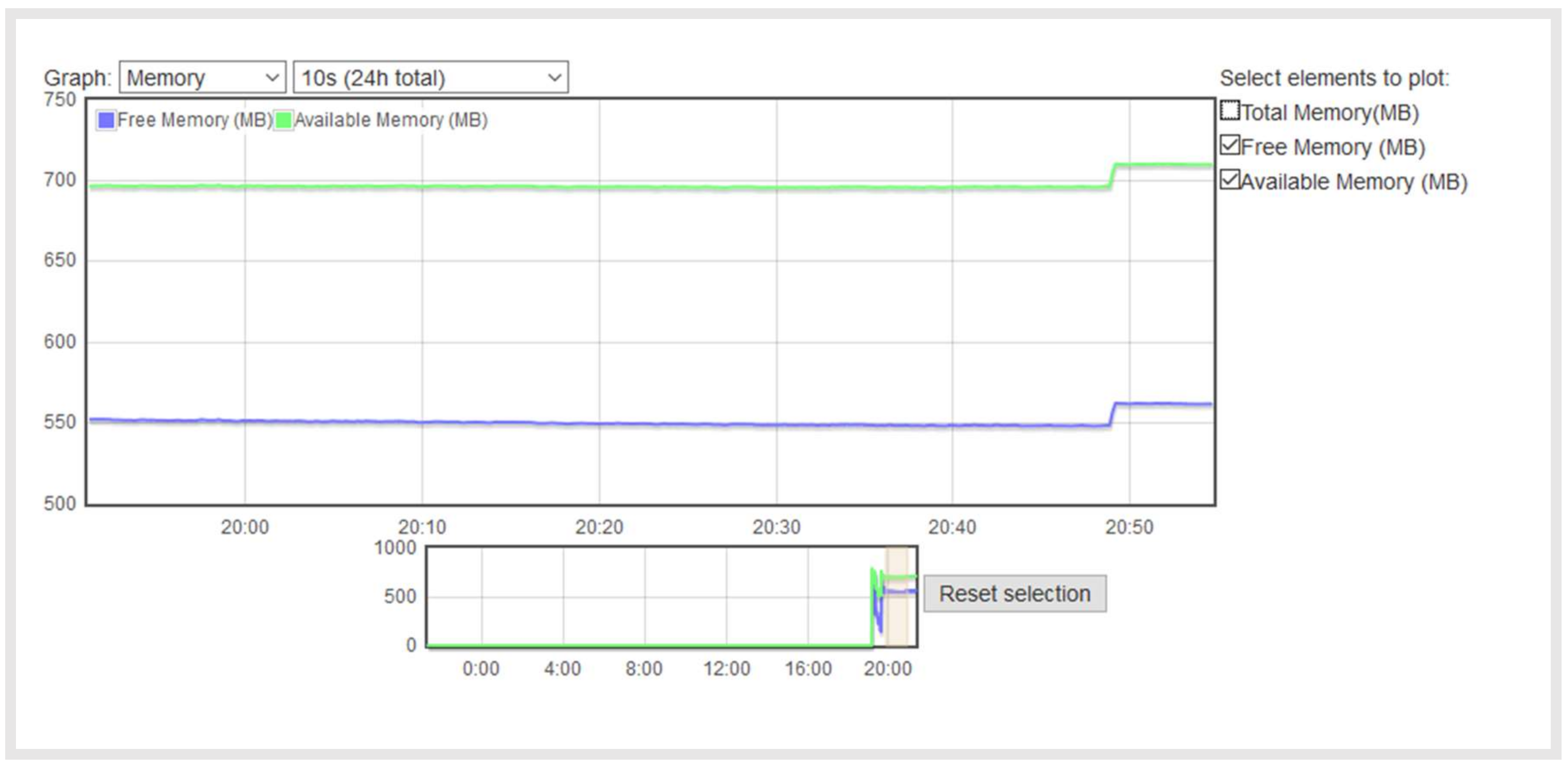
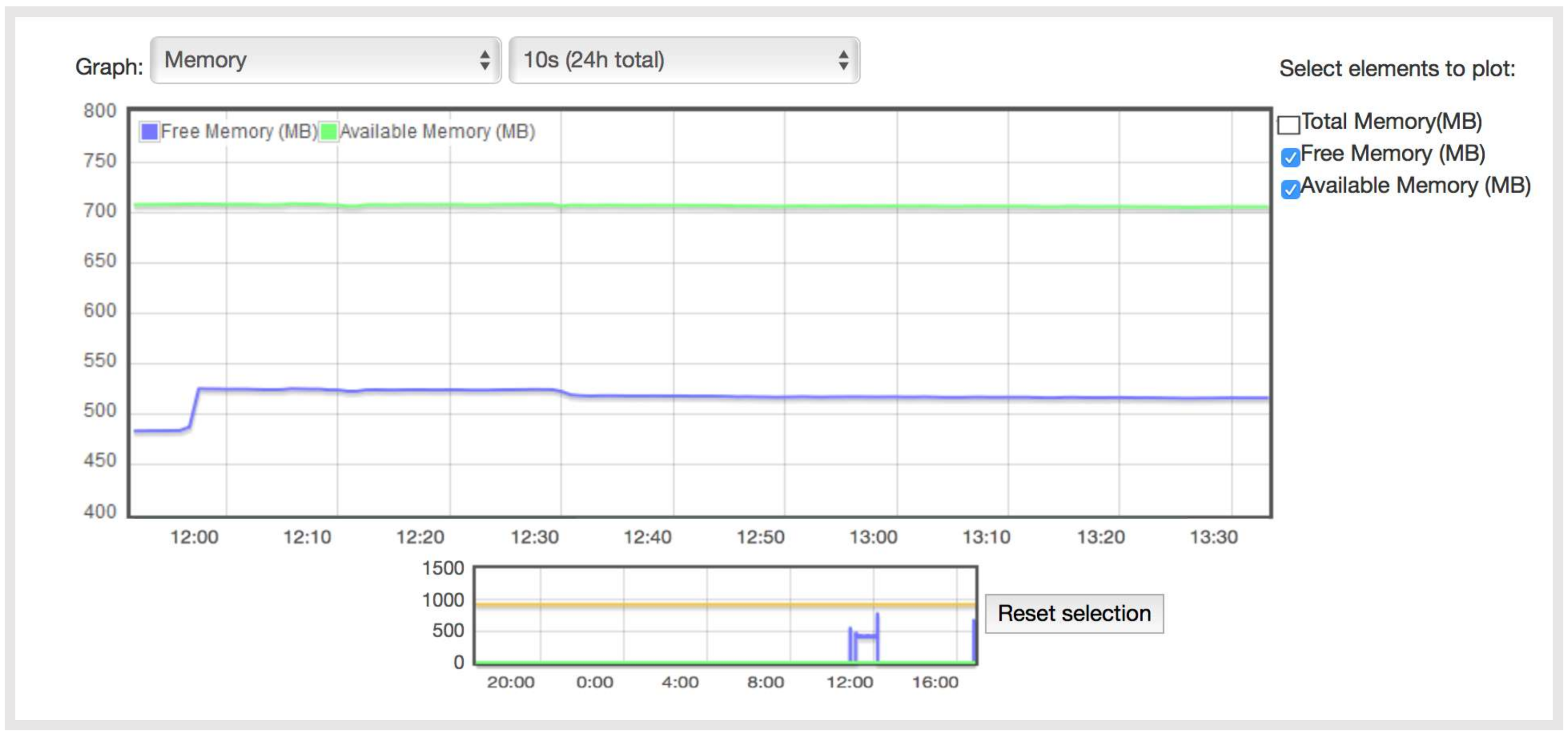
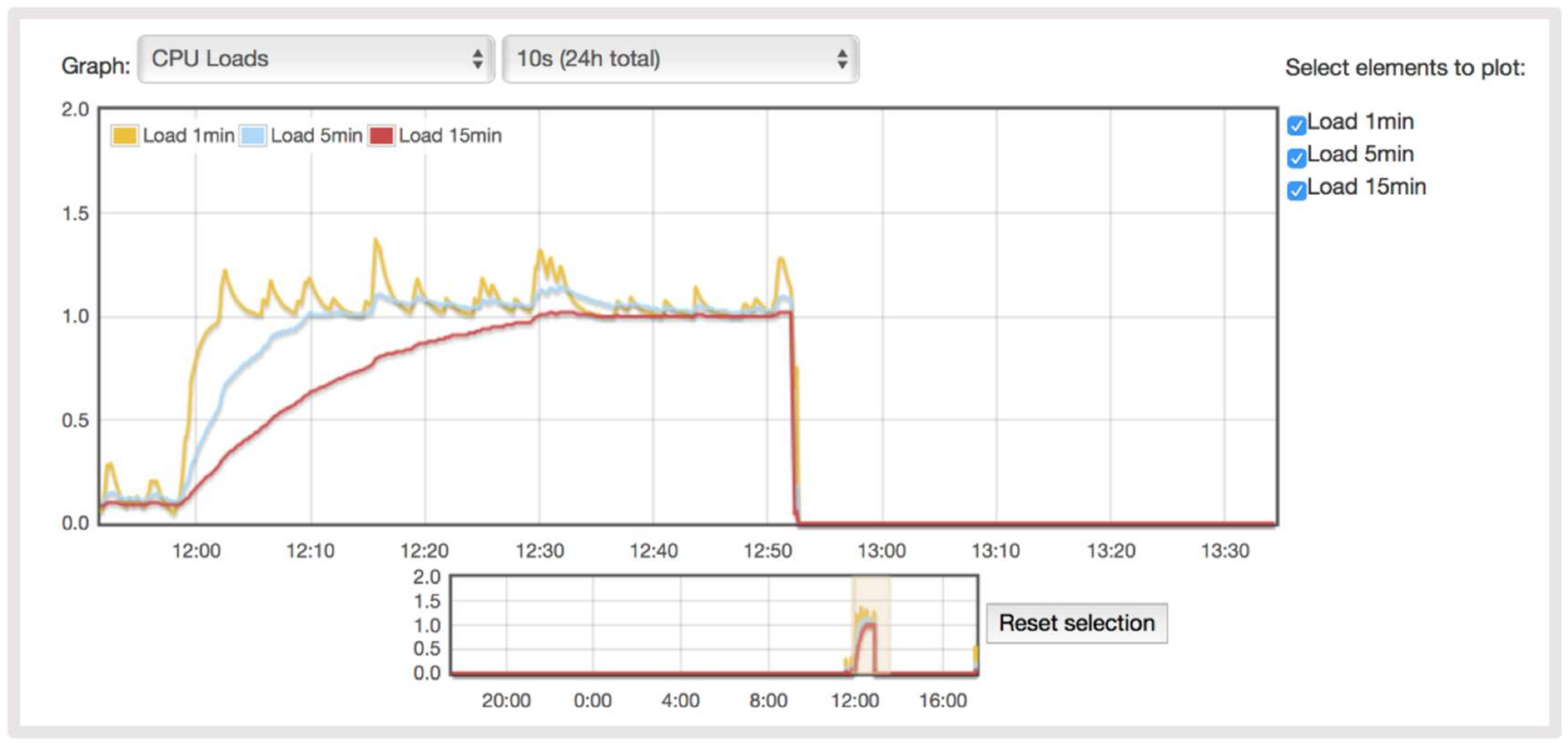
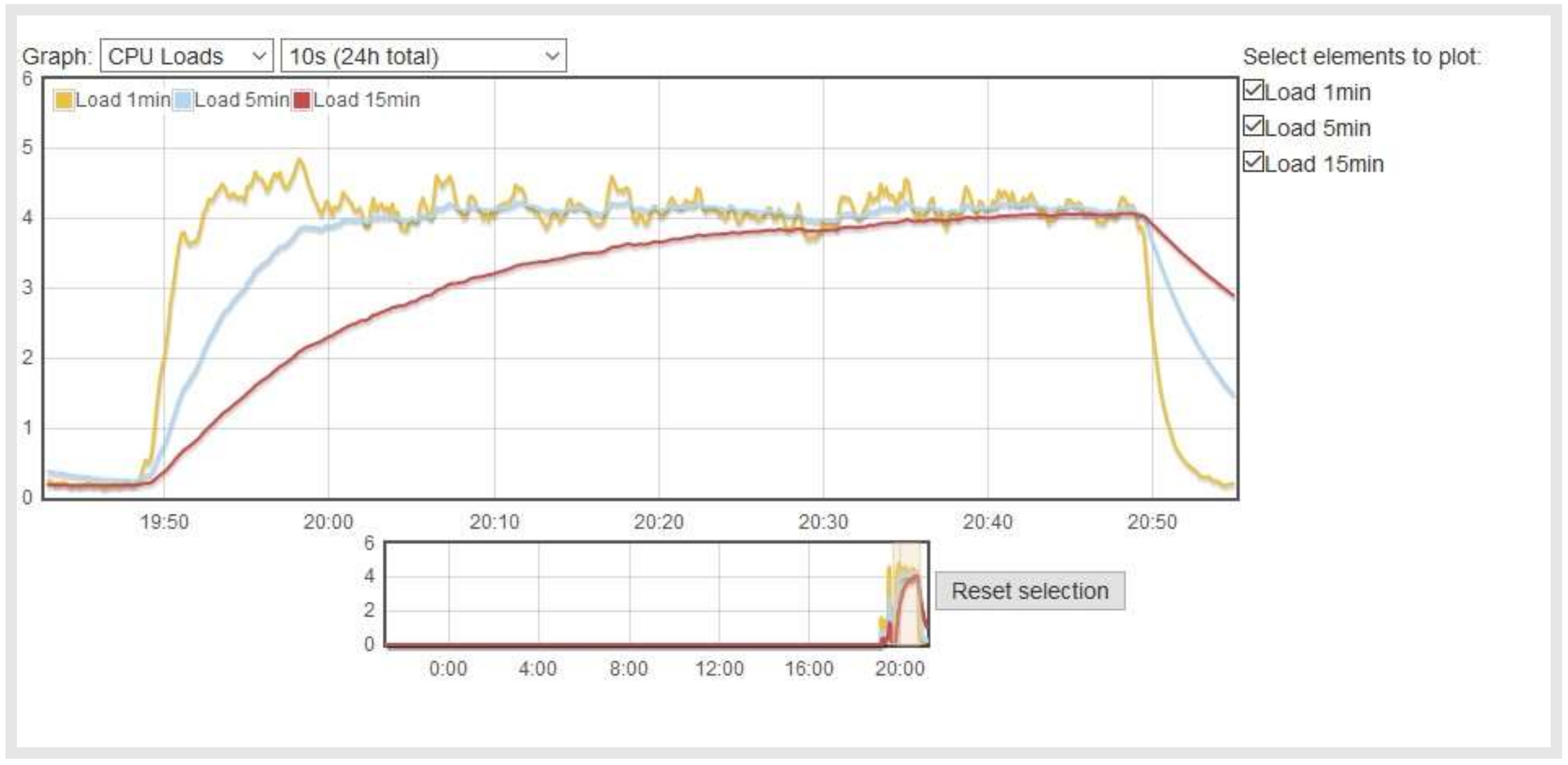
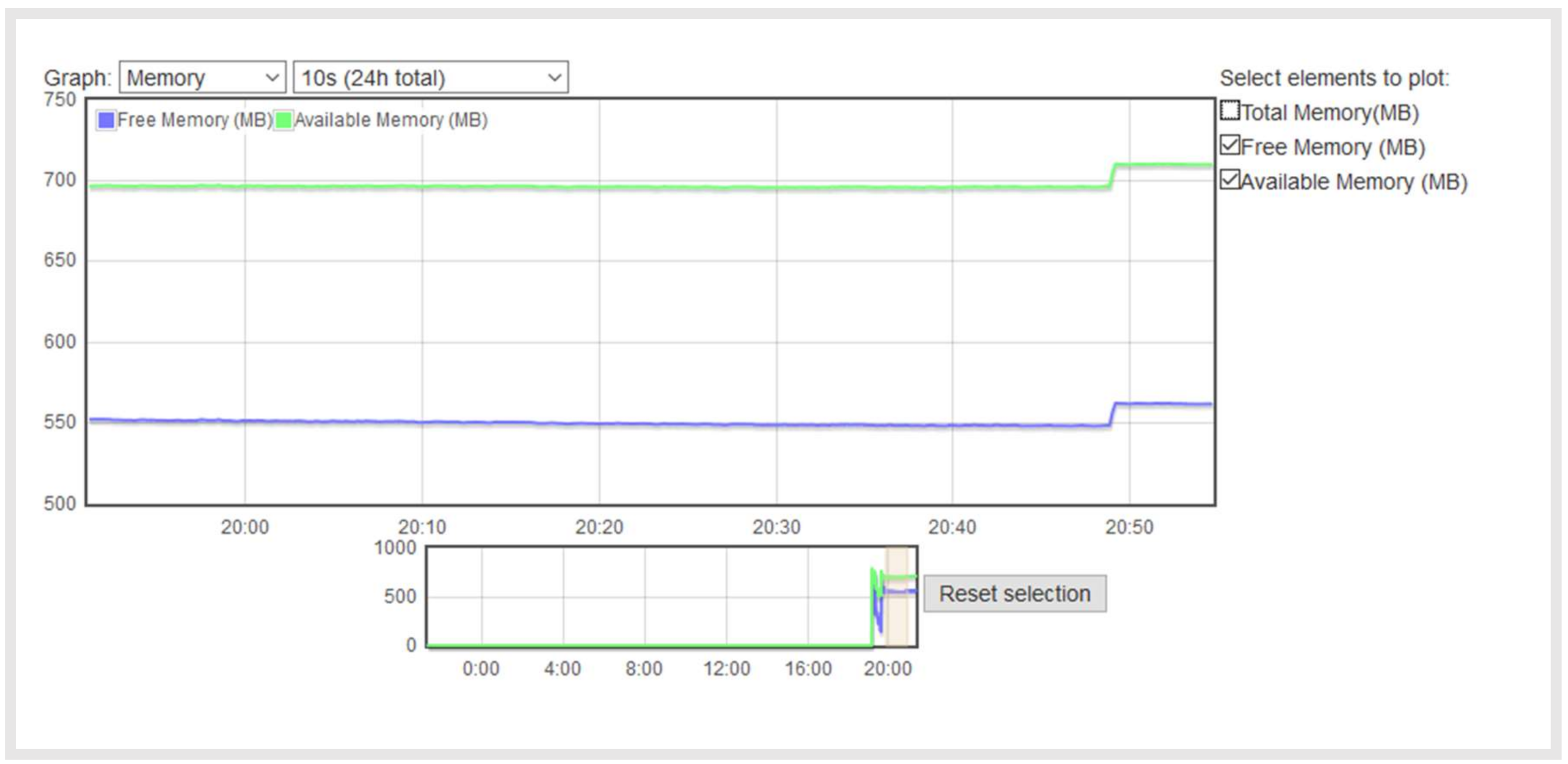
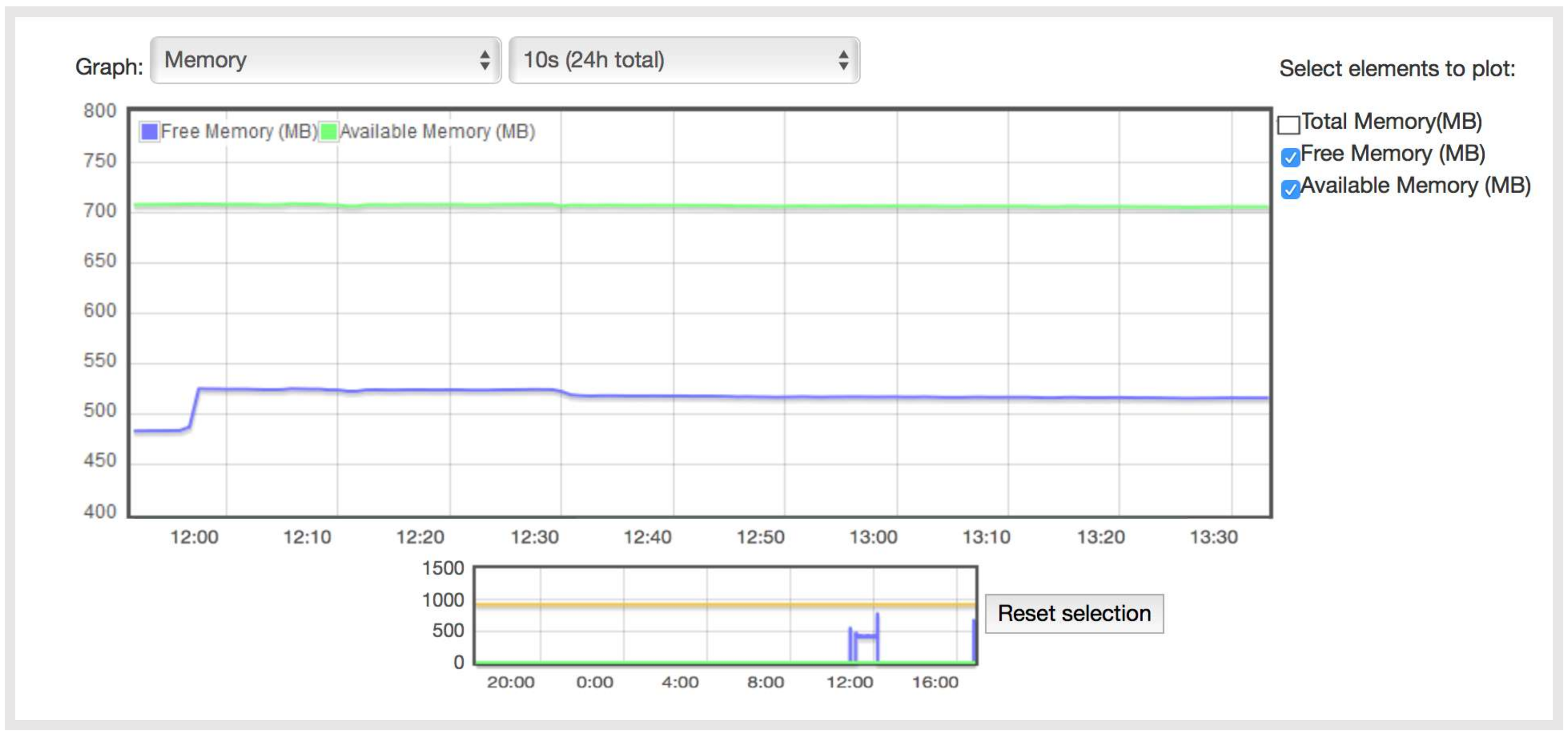
- Conclusion validity: In the experiment to compare both implementations, the TR program demands longer computation times and higher memory but the same power. The test was not performed to demonstrate that Erlang was better than Python programming language, but to identify really which approach provided better support for the specification of IoT systems. A threat to the validity of the results could be the programmer’s knowledge of the languages used (TeleoR vs. general-purpose programming languages). The experiment compares two implementations carried out by an IoT developer who knows both languages. The experiment could be repeated with users who do not know any of the two languages and even make comparisons between implementations with a third language.
- Internal validity: The case study was complex enough to test the necessary mechanisms when implementing IoT applications (many sensors and actuators, message exchanging with other agents, etc.). A threat to the validity of the results could be the fact of not considering all types of TR nodes. The use of all levels of the hierarchy should be incorporated in future experiments. The feasibility from a technological point of view has been demonstrated in Section 4.2.1.
- Construct validity: As construct validity is mainly related to the method used to evaluate the outcomes of the task of the experiment, some threats were avoided by using RPi-Monitor that enjoys reputation for Raspberry Pi resources usages.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Mulani, T.; Pingle, S. Internet of Things. Int. Res. J. Multidiscip. Stud. SPPP’s 2016, 2, 1–4. [Google Scholar]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Chen, C.; Helal, S.; de Deugd, S.; Smith, A.; Chang, C.K. Toward a collaboration model for smart spaces. In Proceedings of the 2012 3rd International Workshop on Software Engineering for Sensor Network Applications, SESENA 2012, Zurich, Switzerland, 2 June 2012. [Google Scholar]
- Patel, P.; Cassou, D. Enabling high-level application development for the Internet of Things. J. Syst. Softw. 2015, 103, 62–84. [Google Scholar] [CrossRef]
- Nilsson, N. Teleo-Reactive programs for agent control. J. Artif. Intell. Res. 1994, 1, 139–158. [Google Scholar]
- Nilsson, N. TR Programs. Available online: http://teleoreactiveprograms.net (accessed on 31 March 2018).
- Morales, J.L.; Sánchez, P.; Alonso, D. A systematic literature review of the teleo-reactive paradigm. Artif. Intell. Rev. 2014, 42, 945–964. [Google Scholar] [CrossRef]
- Clark, K.L.; Robinson, P.J. Robotic agent programming in TeleoR. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5040–5047. [Google Scholar]
- Sánchez, P.; Álvarez, B.; Morales, J.M.; Alonso, D.; Iborra, A. An approach to modeling and developing teleo-reactive systems considering timing constraints. J. Syst. Softw. 2016, 117, 317–333. [Google Scholar] [CrossRef]
- Qulog/TeleoR Home Page. Available online: http://staff.itee.uq.edu.au/pjr/HomePages/QulogHome.html (accessed on 31 March 2018).
- The Object Management Group Website. Available online: http://www.omg.org/spec/UML (accessed on 31 March 2018).
- Kent, S. Model Driven Engineering. In Integrated Formal Methods. IFM 2002; Lecture Notes in Computer Science; Butler, M., Petre, L., Sere, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2002; Volume 2335. [Google Scholar]
- Cassou, D.; Bruneau, J.; Consel, C.; Balland, E. Towards a Tool-based Development Methodology for Pervasive Computing Applications. IEEE TSE Trans. Softw. Eng. IEEE Comput. Soc. 2012, 38, 1445–1463. [Google Scholar] [CrossRef]
- Serral, E.; Valderas, P.; Pelechano, V. Towards the model driven development of context-aware pervasive systems. Pervasive Mob. Comput. 2010, 6, 254–280. [Google Scholar] [CrossRef]
- Cubo, J.; Brogi, A.; Pimentel, E. Behaviour-aware compositions of things. In Proceedings of the IEEE International Conference on Green Computing and Communications, Besancon, France, 20–23 November 2012. [Google Scholar]
- Cubo, J.; Brogi, A.; Pimentel, E. A cloud-based Internet of Things platform for ambient assisted living. Sensors 2014, 14, 14070–14105. [Google Scholar] [CrossRef] [PubMed]
- Fernández, D.; Sánchez, P.; Álvarez, B.; Riquelme, J.A.; Iborra, A. TRIoT: A Proposal for Deploying Teleo-Reactive Nodes for IoT Systems. In Advances in Cyber-Physical Multi-Agent Systems; The PAAMS Collection, Chapter 5; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Erlang Official Website. Available online: https://www.erlang.org/ (accessed on 31 March 2018).
- Logan, M.; Merritt, E.; Carlsson, R. Erlang and OTP in Action; Manning Publications: Shelter Island, NY, USA, 2010. [Google Scholar]
- Dongol, B.; Hayes, I.J.; Robinson, P.J. Reasoning about goal-directed real-time teleo-reactive programs. Form. Asp. Comput. 2014, 26, 563. [Google Scholar]
- Erlang/OTP Documentation. Available online: http://erlang.org/doc/man/gen_server.html (accessed on 31 March 2018).
- Antolinos, E. Erlang Implementation of a Virtual Machine for Executing Teleo-Reactive Programmes in the Internet of Things. Final Degree Thesis, Universidad Politécnica de Cartagena, Cartagena, Spain, July 2017. Available online: http://repositorio.upct.es/handle/10317/6561?locale-attribute=en (accessed on 31 March 2018).
- Eclipse Xtext Documentation. Available online: https://www.eclipse.org/Xtext/ (accessed on 31 March 2017).
- McEwen, A.; Cassimally, H. Designing the Internet of Things; Wiley: Chichester, UK, 2014. [Google Scholar]
- Raspberry 2 Model B Features. Available online: https://www.raspberrypi.org/products/raspberry-pi-2-model-b/ (accessed on 31 March 2018).
- Morales, J.M.; Navarro, E.; Sánchez, P.; Alonso, D. A family of experiments to evaluate the understandability of TRiStar and i* for modeling teleo-reactive systems. J. Syst. Softw. 2016, 114, 82–100. [Google Scholar] [CrossRef]
- Wohlin, C.; Runeson, P.; Höst, M.; Ohlsson, M.C.; Regnell, B.; Wesslén, A. Experimentation in Software Engineering: An Introduction, 1st ed.; Kluwer Academic Publishers: Norwell, MA, USA, 2000. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition | Action | |
|---|---|---|
| K1 | → | a1 |
| K2 | → | a2 |
| … | ||
| Ki | → | ai |
| … | ||
| Km | → | am |
%% ================================================================================== %% %% Bottle Collecting Robot %% %% ================================================================================== %% enums dir ::= left | right %% dir and thing are enums thing ::= bottle | drop end percepts %% directly linked to sensors gripper_open: (), holding: (), see: (thing), touching: (), over_drop: () end beliefs %% other beliefs. None in the current example end durative %% durative actions (actuators) move : (double), turn : (dir) end discrete %% ballistic actions (actuators) open_gripper: (), close_gripper: () end vars int _collected := 0 %% an internal variable to keep the account of bottles int _other_collected := 0 %% account of bottles of the other robot end goals collect_bottles:(string) %% main goal of the TR program where the execution starts collect_bottles(OtherAg){ _collected + _other_collected >= 10 ~> () %% do nothing holding & over_drop ~> drop_and_leave(OtherAg) holding ~> get_to_drop() true ~> get_bottle() } drop_and_leave:(string) drop_and_leave(OtherAg){ gripper_open ~> leave_drop() %% update _collected variable and send msg to the other robot true ~> open_gripper() ++ _collected := _collected + 1; count (_collected) to OtherAg } leave_drop:() leave_drop(){ not see(drop) & not see(bottle) ~> move(1.0) see(drop) ~> turn(left, 0.8) see(bottle) ~> turn(right, 0.8) } get_to_drop:() get_to_drop(){ over_drop ~> () see(drop) ~> move(1.5) %% turn left for 2s, then move for 2s and repeat true ~> turn(left,1.0) for 2; move(1.0) for 2 } get_bottle:() get_bottle(){ holding ~> () touching & gripper_open ~> close_gripper() touching ~> open_gripper() see(bottle) ~> move(1.5) true ~> turn(left,1.0) for 2.8; move(1.0) for 2 } end |
| messages %% from, msg, params handle(_,”count”, val) -> _other_collected := val %% update the variable with the param handle(_,_,_) %% do nothing for other messages end |
task1:() ~> task1(){ Condition1 ~> Action1 . . . ConditionN-1 ~> ActionN-1 true ~> ActionN } | task1()-> case {Condition1, ..., ConditionN-1} of {true,_,...,_} -> Action1; . . . {_,_,...,true} -> ActionN-1; {_,_,...,_} -> ActionN end. |
task1:() ~> task1(){ Percept1 ~> Action1 . . . BeliefN-1 ~> ActionN-1 true ~> ActionN } | task1()-> case {bs:is_belief(Percept1),..., bs:is_belief(BeliefN-1} of {true,_,...,_}-> Action1; . . . {_,_,...,true}-> ActionN-1; {_,_,...,_} -> ActionN end. |
leave_drop:() ~> leave_drop (){ not see(drop) & not see(bottle) ~> move(1.0) %% {false,false} see(drop) ~> turn(left, 0.8) %% {_,true} see(bottle) ~> turn(right, 0.8) %% {true,_} } |
leave_drop() -> case {bs:is_belief(see,bottle),bs:is_belief(see,drop)} of {false,false} -> %% execute_while because it is a durative action. %% {leave_drop,not_see} to register the goal and rule initiating the action %% move is the action and {1.0} is its parameter %% true is indicating that there is no time limit for the action execution %% collect_bottles() is a parameter to know the main goal auxilary:execute_while([{leave_drop,not_see},move,{1.0},true]), collect_bottles(); {_,true} -> auxilary:execute_while([{leave_drop,see_drop},turn,{left,0.8},true]), collect_bottles(); {true,_} -> auxilary:execute_while([{leave_drop,see_bottle},turn,{right,0.8},true]), collect_bottles() end. |
task1:()~> task1(){ var1 + var2 < A ~> Action1 percept1(C) & C < F ~> Action2 true ~> Action3 } | task1()-> case { (bs:get_belief(var1)+bs:get_belief(var2))<A, auxilary:compare_value(C,bs:get_belief(percept1),minor,F)} of {true,_} -> Action1; {_,true} -> Action2; {_,_} -> Action 3 end. |
collect_bottles(){ _collected + _other_collected >= 10 ~> () %% do nothing holding & over_drop ~> drop_and_leave holding ~> get_to_drop true ~> get_bottle } |
collect_bottles()-> case {bs:get_belief(_collected)+ bs:get_belief(_other_collected)>=10, bs:is_belief(holding) & bs:is_belief(over_drop), bs:is_belief(holding)} of {true,_,_}-> nil; {_,true,_}-> drop_and_leave(bs:get_belief(otherAg)); {_,_,true}-> get_to_drop(); {_,_,_} -> get_bottle() end. |
variable1 := variable1 + 1 | bs:update_belief({variable1, variable1 + 1}) |
drop_and_leave:(string) ~> drop_and_leave(OtherAg){ gripper_open ~> leave_drop %% update _collected variable true ~> open_gripper() ++ _collected := _collected + 1; count (_collected) to OtherAg } |
drop_and_leave(OtherAg) -> case bs:is_belief(gripper_open) of true -> leave_drop(); _ -> auxilary:execute([{drop_and_leave,true},open_gripper,[]]), bs:update_belief({collected,bs:get_belief(_collected)+1}), OtherAg ! {count,bs:get_belief(_collected)} collect_bottles() end. |
| ... ++ count(_collected) to OtherAg ... messages %% from, msg, params handle(_,”count”, val) -> _other_collected := val %% update the variable with the param handle(_,_,_) %% do nothing for other messages end |
| drop_and_leave()-> ... {_} -> executor:execute([{drop_and_leave,true},open_gripper,[]]), bs:update_belief({_collected,bs:get_belief(_collected)+1}), OtherAg ! {count,bs:get_belief(_collected)},... ... handle_message()-> receive {_,count,Num}-> bs:update_belief({_other_collected,Num}), handle_message(); %% recursive call: always waiting for incoming messages {_,_,_}-> handle_message() end. |
-module(bs). %% This tell Erlang that we’ll be using gen_server module for the behavior. -behaviour(gen_server). %% ==================== %% API Function Exports %% The number is the arity of the function %% ==================== -export([start_link/0, add_belief/1, update_belief/1, remove_belief/1, remove_one_belief/1, get_belief/1, get_bs/0, is_belief/1, is_belief/2, stop/0]). %% ==================================== %% gen_server Function Exports, %% are wrappers for calls to the server %% ==================================== -export([init/1, %% called when a connection is made to the server handle_call/3, %% called in response to gen_server:call handle_cast/2, handle_info/2, terminate/2, code_change/3]). |
%% ======================== %% API Function Definitions %% ======================== start_link() -> gen_server:start_link({local, ?MODULE}, ?MODULE, [], []). add_belief(Belief)-> gen_server:cast(?MODULE,{add, Belief}). update_belief(Belief)-> gen_server:cast(?MODULE, {update, Belief}). remove_belief(Belief)-> gen_server:cast(?MODULE, {remove, Belief}). remove_one_belief(Belief)-> gen_server:cast(?MODULE, {remove_one, Belief}). get_belief(Belief)-> gen_server:call(?MODULE,{get, Belief}). is_belief(Key)-> gen_server:call(?MODULE,{is_belief, Key}). is_belief(Key1, Key2)-> gen_server:call(?MODULE,{is_belief, Key1, Key2}). get_bs()-> gen_server:call(?MODULE,{get_bs}). stop()-> gen_server:cast(?MODULE, stop). |
-module(auxilary). %% ============= %% API functions %% ============= -export([execute_while/1, execute_while/5, execute/1, add_timeout/3, remember/2, compare_value/4, while_condition/1]). |
| Concept in TR Program | Artifact in Erlang |
|---|---|
| goal | function declaration with case expression |
| rule | function clause |
| rule condition | guard sequence |
| rule action | function call |
| variable, percept, belief | variable accessible through the BS |
| arithmetic expression | arithmetic expression on function calls accessing the BS |
| assignment statement in rule | function call updating the BS |
| message to another agent | message to an Erlang process |
| message handle | clause of the handle_message function |
| remember/forget operation | ad hoc implementations of Erlang functions for accessing the BS |
| while condition in rule | ad hoc implementations of Erlang functions for extending the rule conditions |
| timed sequence of rule durative actions | sequence of function calls triggering alarms for finishing the action execution |
| enums | atoms |
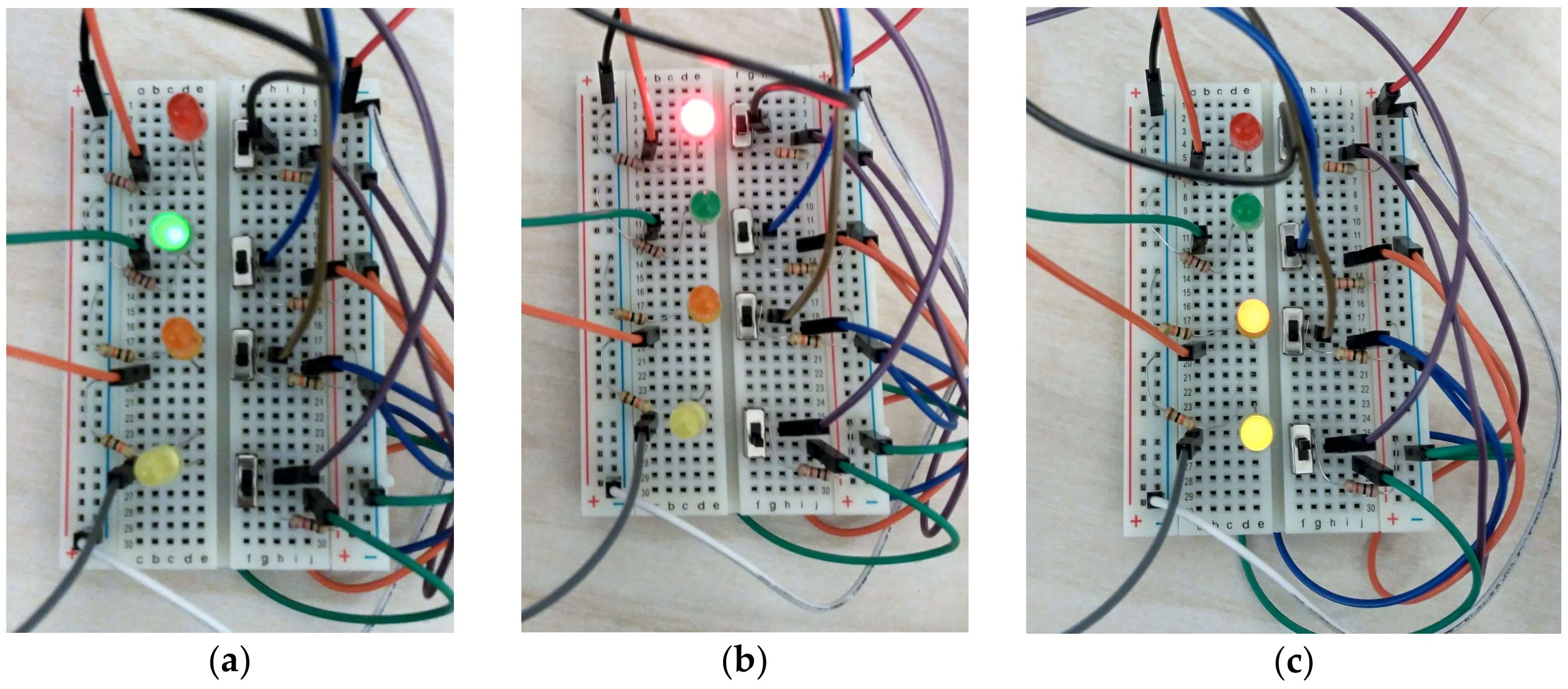
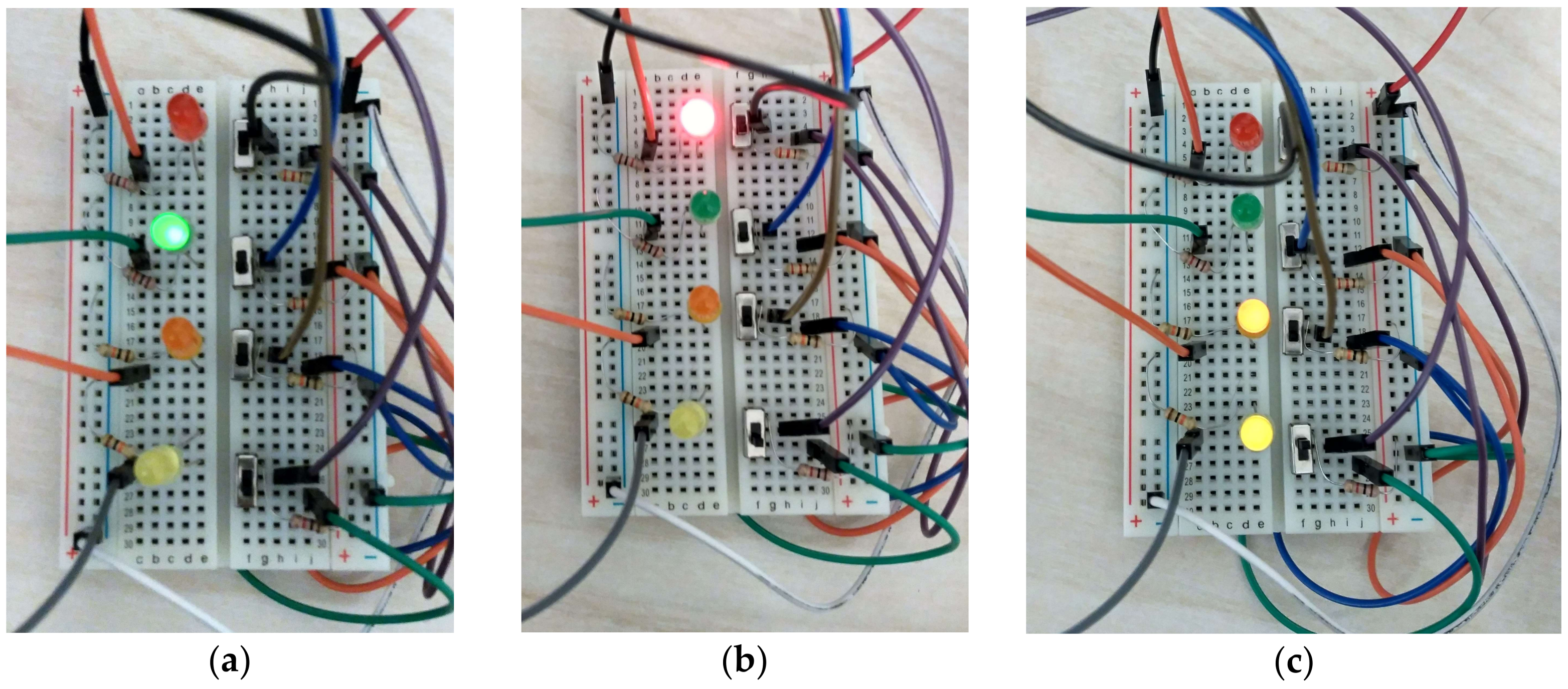
| Pin | I/O Attached | Action | States |
|---|---|---|---|
| L0 | Red LED | move | |
| L1 | Green LED | turn | |
| L2 | Orange LED | gripper is open | |
| L4 | Yellow LED | bottle is collected | |
| L3 | Switch A | touching | |
| L5 | Switch B | see drop | |
| L6 | Switch C | see bottle | |
| L7 | Switch D | over drop |
| Version | Pi State | Power Consumption (Input 5 V) |
|---|---|---|
| Python | powering on | 100–440 mA (0.5–2.2 W) |
| idle | 320–330 mA (1.6–1.65 W) | |
| running the robot example | 340–370 mA (1.7–1.85 W) | |
| Erlang interpreter | powering on | 107–400 mA (0.535–2 W) |
| idle | 310–330 mA (1.55–1.65 W) | |
| running the robot example | 414–450 mA (2.07–2.25 W) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez, P.; Álvarez, B.; Antolinos, E.; Fernández, D.; Iborra, A. A Teleo-Reactive Node for Implementing Internet of Things Systems. Sensors 2018, 18, 1059. https://doi.org/10.3390/s18041059
Sánchez P, Álvarez B, Antolinos E, Fernández D, Iborra A. A Teleo-Reactive Node for Implementing Internet of Things Systems. Sensors. 2018; 18(4):1059. https://doi.org/10.3390/s18041059
Chicago/Turabian StyleSánchez, Pedro, Bárbara Álvarez, Elías Antolinos, Diego Fernández, and Andrés Iborra. 2018. "A Teleo-Reactive Node for Implementing Internet of Things Systems" Sensors 18, no. 4: 1059. https://doi.org/10.3390/s18041059
APA StyleSánchez, P., Álvarez, B., Antolinos, E., Fernández, D., & Iborra, A. (2018). A Teleo-Reactive Node for Implementing Internet of Things Systems. Sensors, 18(4), 1059. https://doi.org/10.3390/s18041059