Infrastructure-Less Communication Platform for Off-The-Shelf Android Smartphones


Abstract
:1. Introduction
- We introduce a tree-structured network topology construction method which can connect multiple Wi-Fi Direct groups without sharing prior knowledge. Since the method is assumed to be performed autonomously and decentralized, users can construct an ad hoc private D2D network.
- We also introduce a novel routing method based on the relationship of the tree topology rather than IP address. Since arbitrary device ID is used for device identification, there is no need to worry about IP address conflicts.
- We show that the above functions can be realized on off-the-shelf smartphones. Our experiments indicate that users can freely communicate with unknown peripheral smartphones with low delay even when no local network or hotspot is available.
2. Related Works
2.1. Wi-Fi Direct
- Standard: After discovering a neighboring device, negotiations are conducted to determine which device will be the GO; decide the roles of the other devices; and assign IP addresses, etc.
- Autonomous: If either device is already a GO, then it assumes that role without negotiation and proceeds to assign IP addresses, etc.
- Persistent: If devices have previously experienced connection, then the previous GO resumes that role without renegotiating and proceeds to assign IP addresses, etc.
2.2. Wi-Fi Direct-Based Multi-Hop Communication Platform
2.3. Challenges
- (R1)
- Connection with unknown devices without prior setting sharing: It is difficult to build a topology between the devices without modifying their OS and/or sharing settings with other devices, such as reporting their IP addresses.
- (R2)
- Low-latency multi-hop communication among arbitrary devices: Since Wi-Fi Direct provides only single-hop communication within the star topology, it is difficult to construct efficient low-delay communication with arbitrary devices.
3. Preliminary Experiment
3.1. Setup
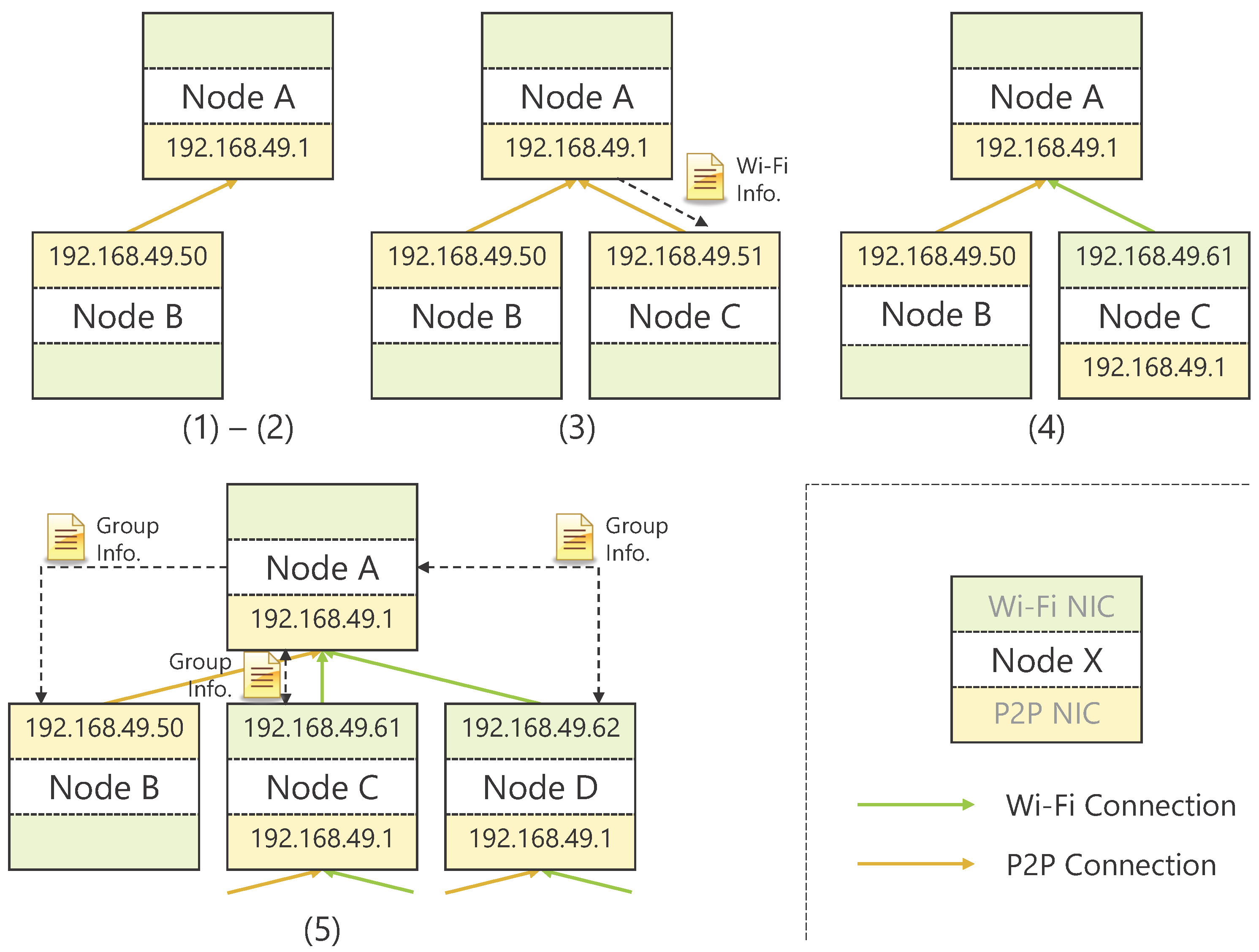
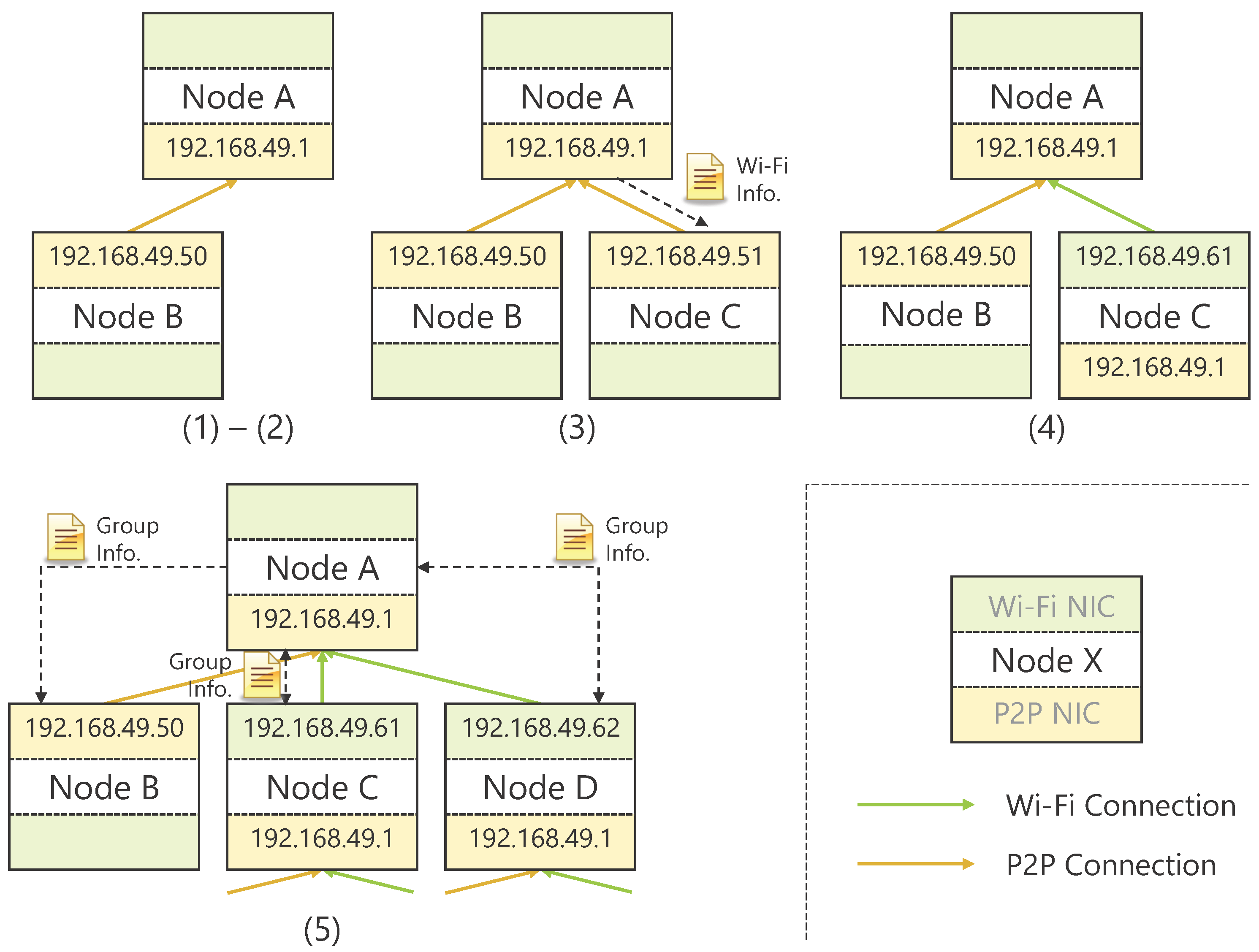
- When sending a message to the GO of a group to which it belongs as a CL, the destination IP address is equal to the IP address assigned to its own P2P-side NIC (192.168.49.1/24), which means that it is processed as a message addressed to itself.
3.2. Results
4. Tree-Type Structured D2D Communication Platform
4.1. Topology Construction Mechanism
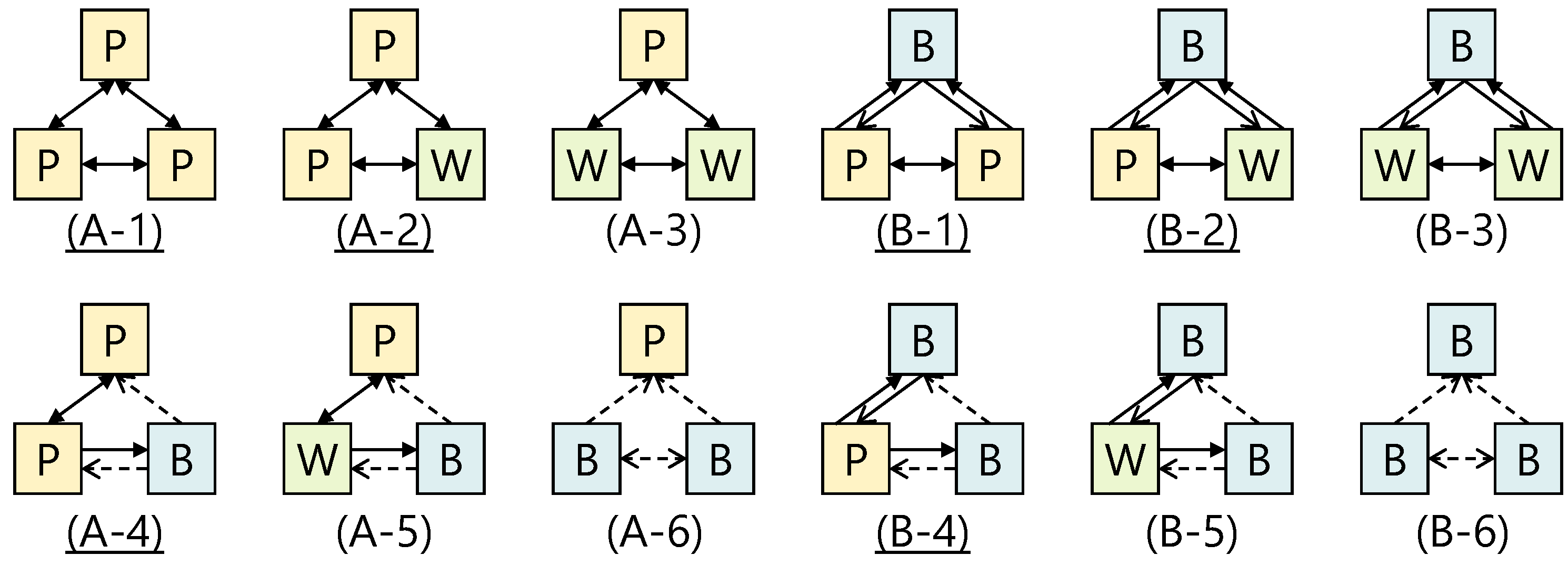
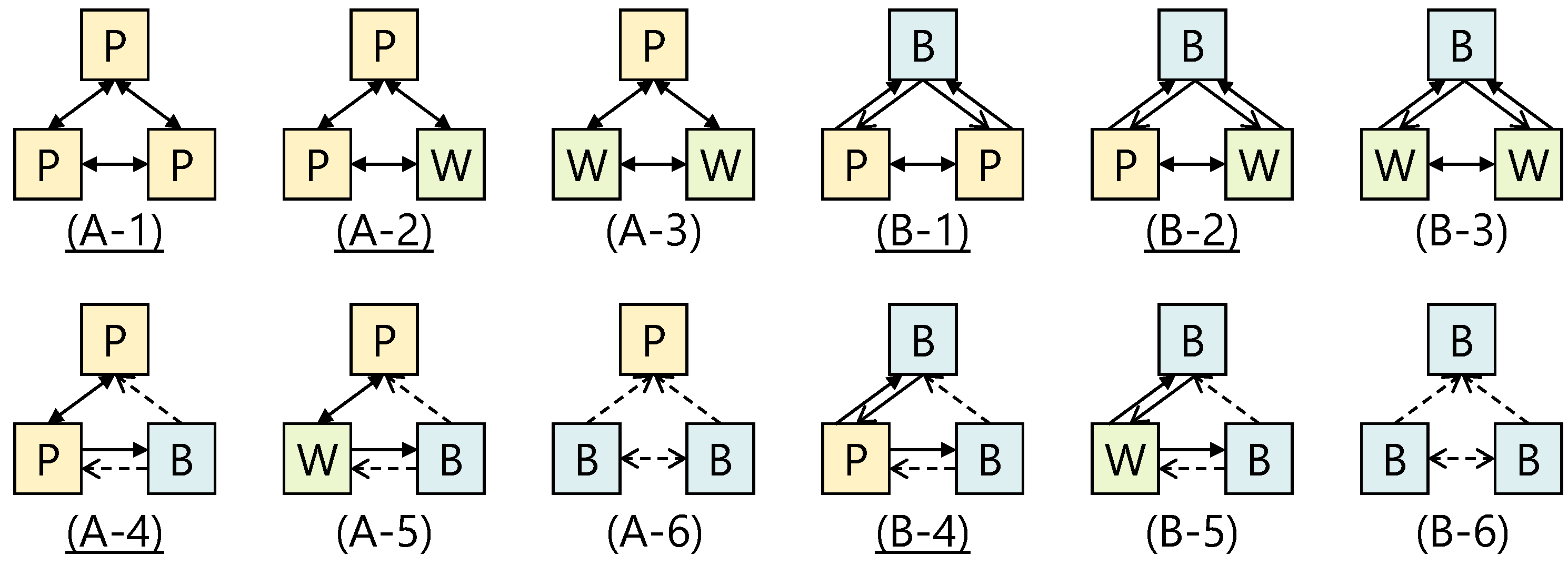
- A user who wishes to construct a D2D network makes its device a GO and invites peripheral devices to its group as CLs.
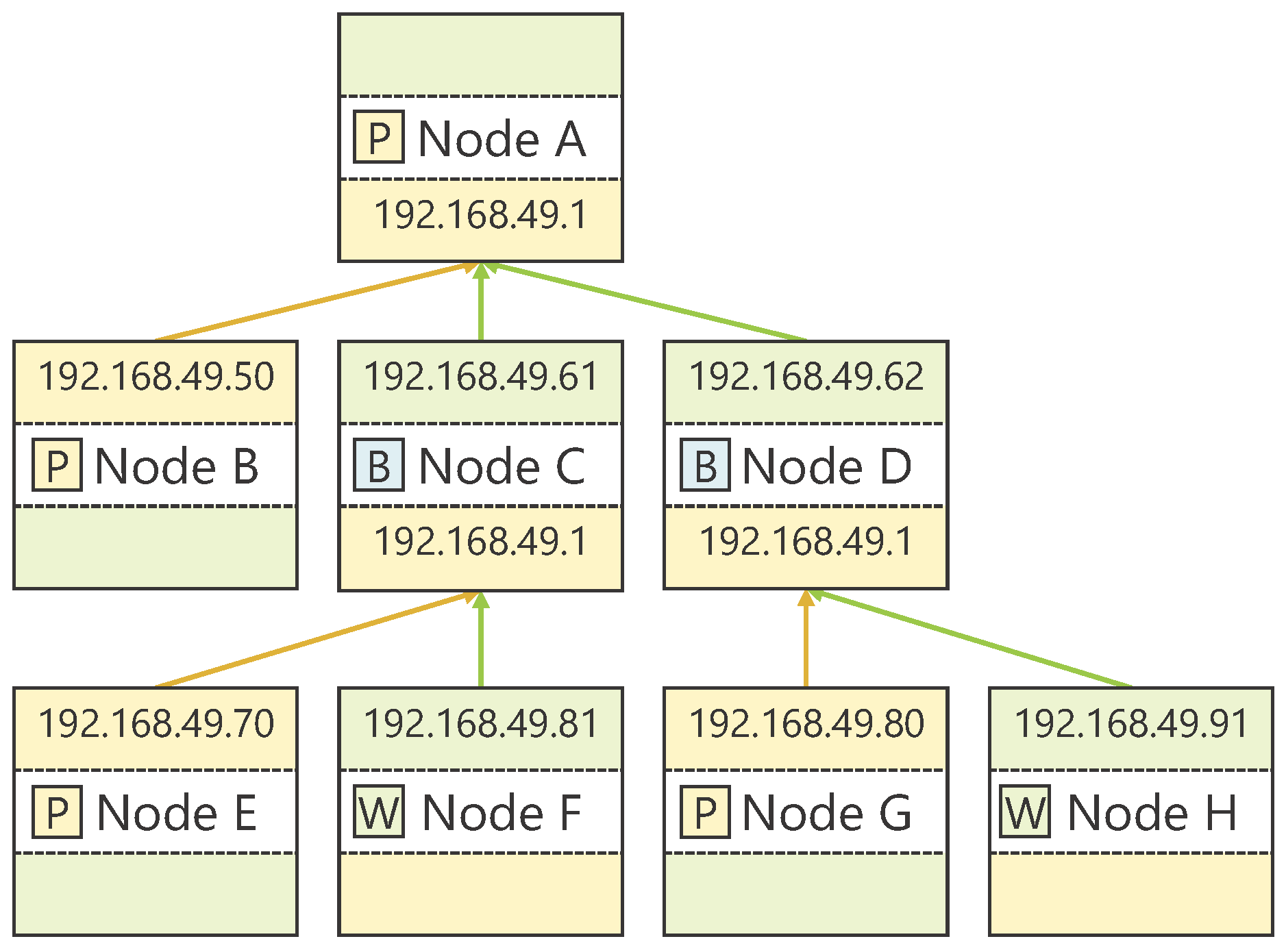
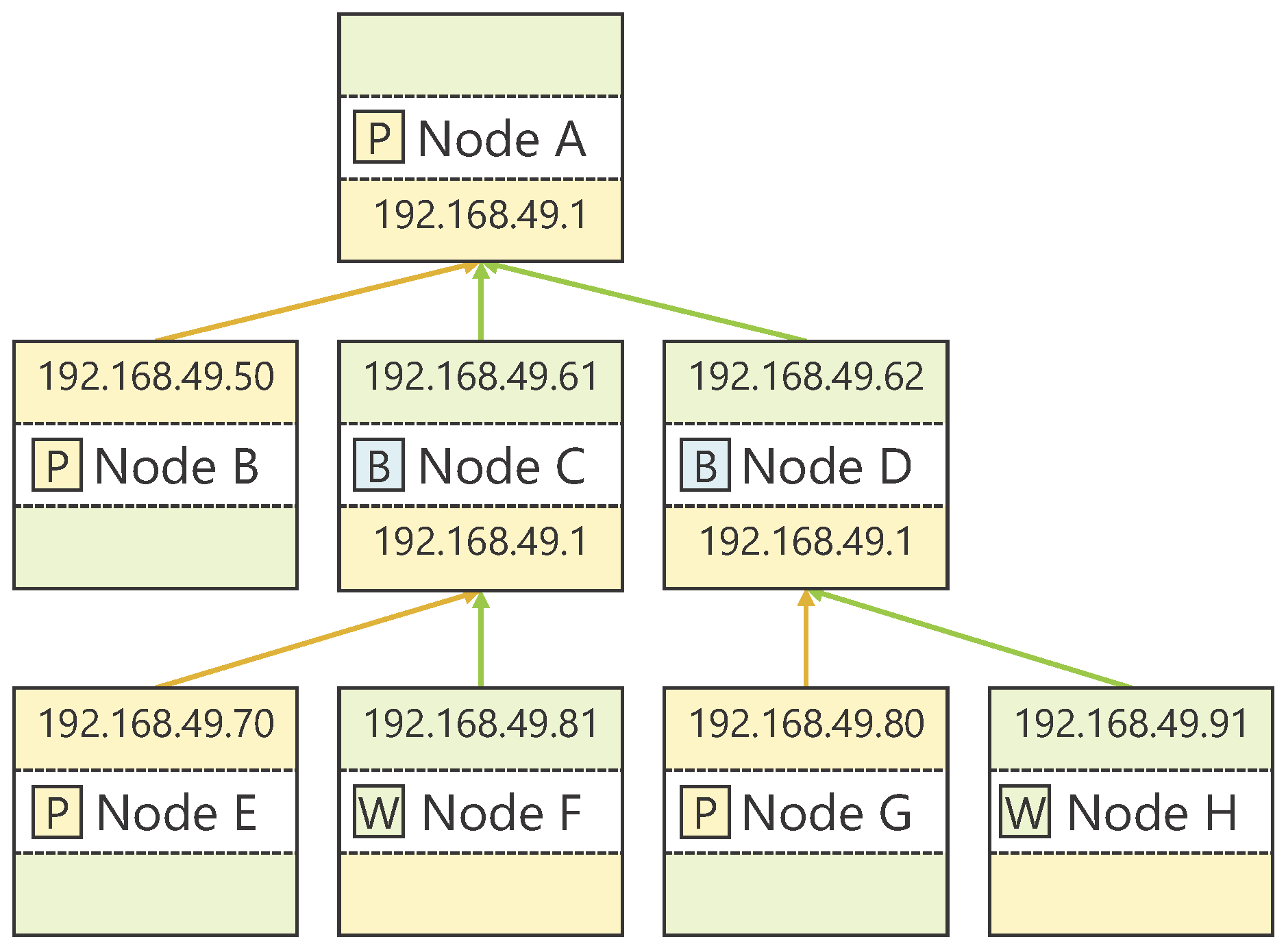
- The role of RN is given to the first connected CL and only P2P connection is allowed.
- The information necessary for Wi-Fi connection is given to CLs that connect after that, and any connection is allowed.
- A CL that has switched to a Wi-Fi connection becomes the GO of a new group and waits for connections from other devices.
- The GO periodically advertises its group information to all devices connected to itself.
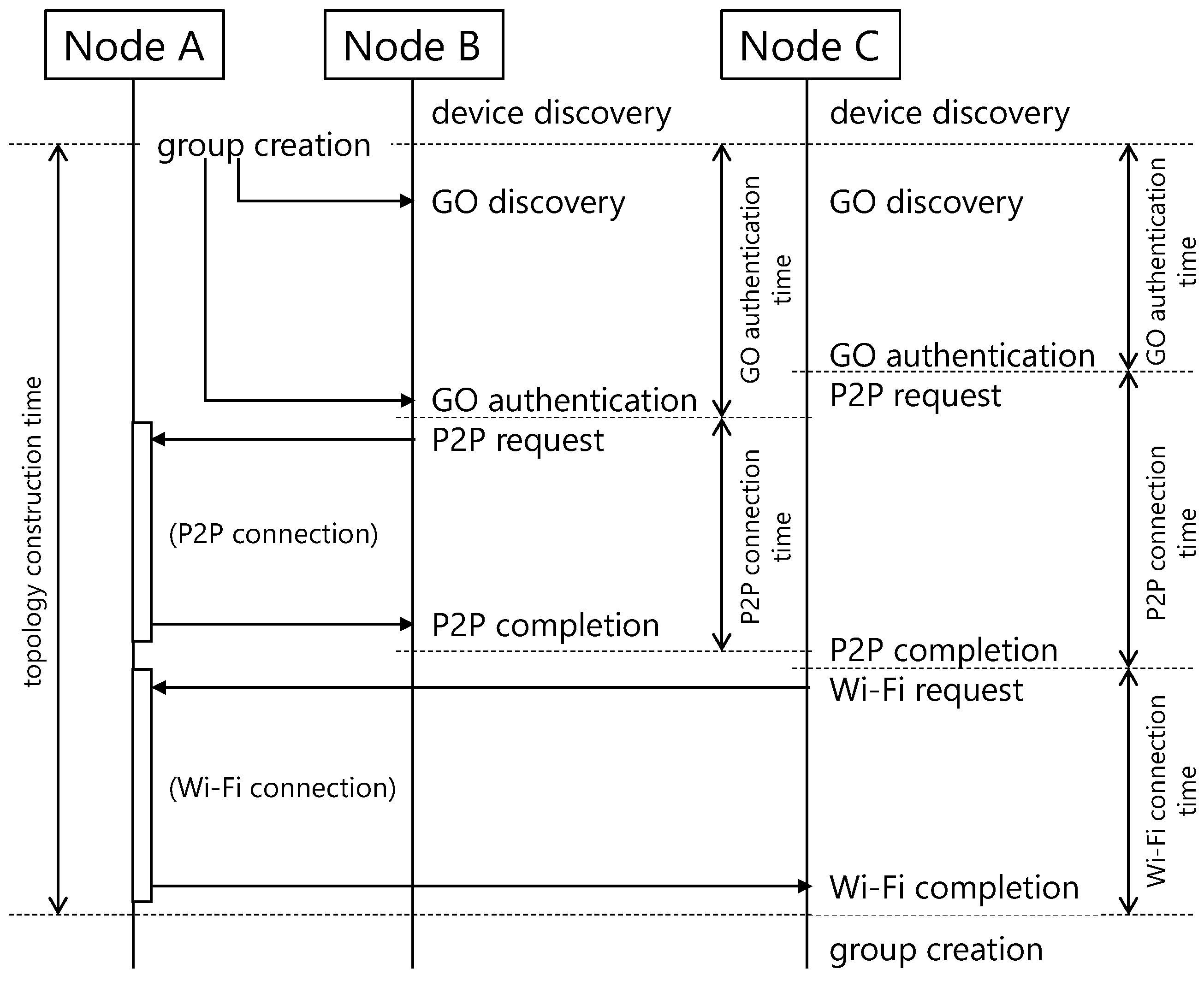
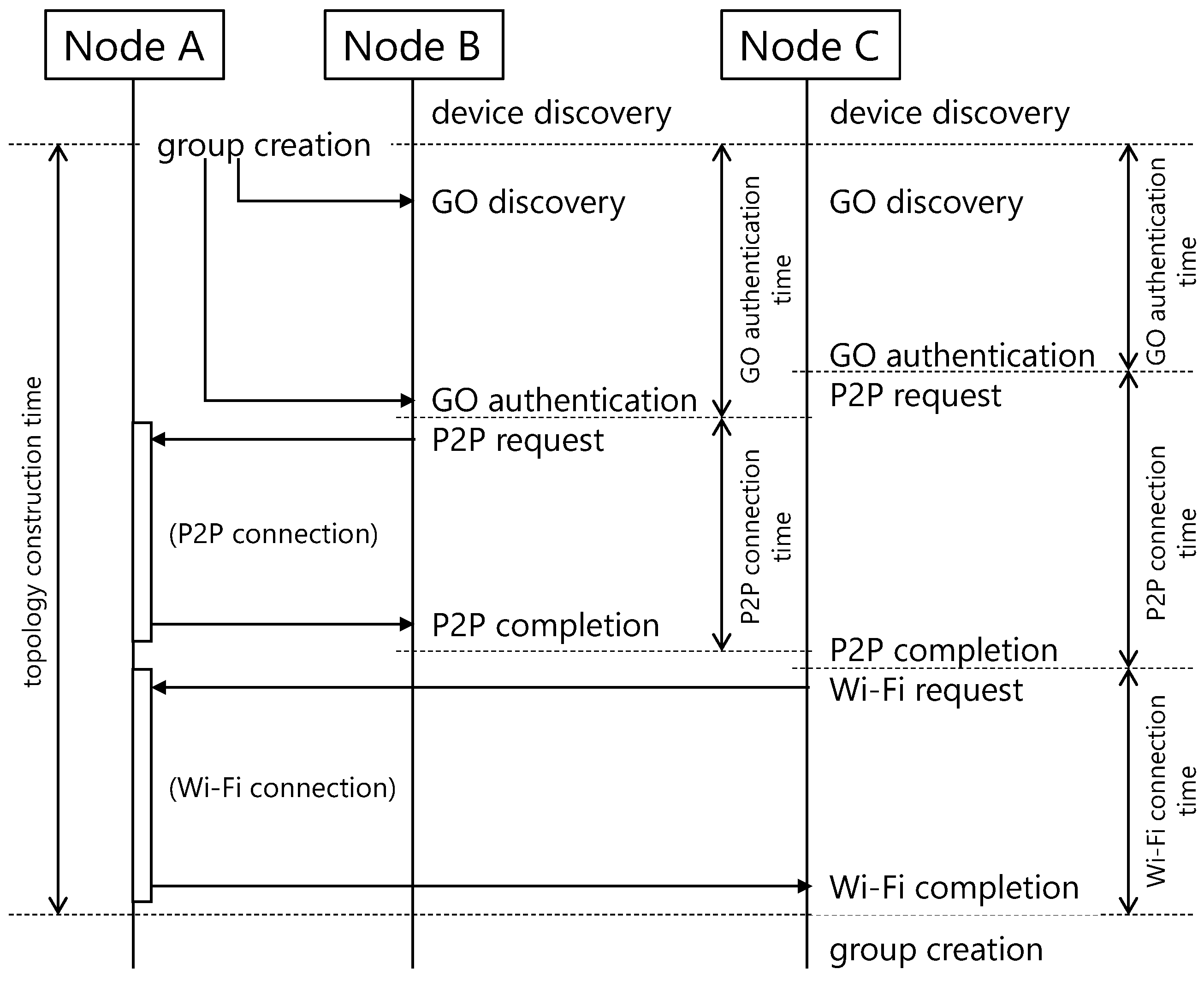
- Each node transitions to the “device discovery” state using ICOS in order to discover peripheral devices.
- Node A executes “group creation” as the GO and starts constructing a D2D network.
- Node B and Node C discover Node A (“GO discovery”) and authenticate that it is a GO that is using ICOS (“GO authentication”).
- Node B and Node C attempt a P2P connection to Node A using Wi-Fi Direct (“P2P request”).
- Node A establishes P2P connections with the requesting devices (“P2P completion”).
- Node A sends the Wi-Fi connection information that was established during the second connection to Node C.
- Node C disconnects the P2P connection to Node A and attempts a Wi-Fi connection (“Wi-Fi request”).
- Node A establishes a Wi-Fi connection with the requesting device (“Wi-Fi completion”).
- Node C becomes the new group’s GO and waits for connection requests from other devices (“group creation”).
- device discovery
- starts searching neighboring devices and Local Services in Wi-Fi Direct and begins scanning Advertise message in Bluetooth. Searching for devices and services is accomplished with standard functions of Wi-Fi Direct. Advertise message, including device name and status (GO or not), is distributed by advertise/scan functions of Bluetooth. Note that since the search function in Wi-Fi Direct is particularly unstable, the system will retry the search every 10 s. However, the retry is not performed during either the P2P or Wi-Fi connection requests.
- group creation
- creates a new group as the GO, registers Local Services in Wi-Fi Direct, and then sends an Advertise message in Bluetooth. At this time, by including the ICOS-specific character string in the Local Service service name and the Advertise message payload, the new GO advertises that it is a device currently using ICOS to connect with peripheral devices.
- GO discovery
- obtains device information in Wi-Fi Direct. At this time, only the GO devices identified from the acquired device information are held. At this point, it is not possible to determine whether the discovered devices are currently using ICOS.
- GO authentication
- obtains Local Service information in Wi-Fi Direct or the Advertise message in Bluetooth. At this time, it determines whether ICOS-specific character string is included in the service name of the Local Service or the Advertise message payload, and only retains information on devices having information satisfying that requirement. Next, by comparing it with the information obtained by “GO discovery”, it authenticates that it is a GO that is using ICOS.
- P2P request
- requests a connection to the discovered GO in Wi-Fi Direct. However, since the Wi-Fi Direct connection request may fail, the system retries the connection request every 10 to 20 s. The time between reconnection requests is determined based on the Wi-Fi Direct state of the device requesting the connection. More specifically, when the state is WifiP2pDevice.INVITED, a retry is executed 10 s after the first request is sent, but if it is WifiP2pDevice.CONNECTED, then the waiting time is extended by 10 s.
- P2P completion
- holds group information sent from the GO. At this time, if the device is registered in the group information as a CL instead of an RN, it may continue to “Wi-Fi request”.
- Wi-Fi request
- leaves the group in Wi-Fi Direct and attempts to connect to the GO by Wi-Fi. Since the Wi-Fi connection request may fail in the same way as the “P2P request”, the system retries the connection request every 10 s.
- Wi-Fi completion
- immediately transits to the “group creation” state.
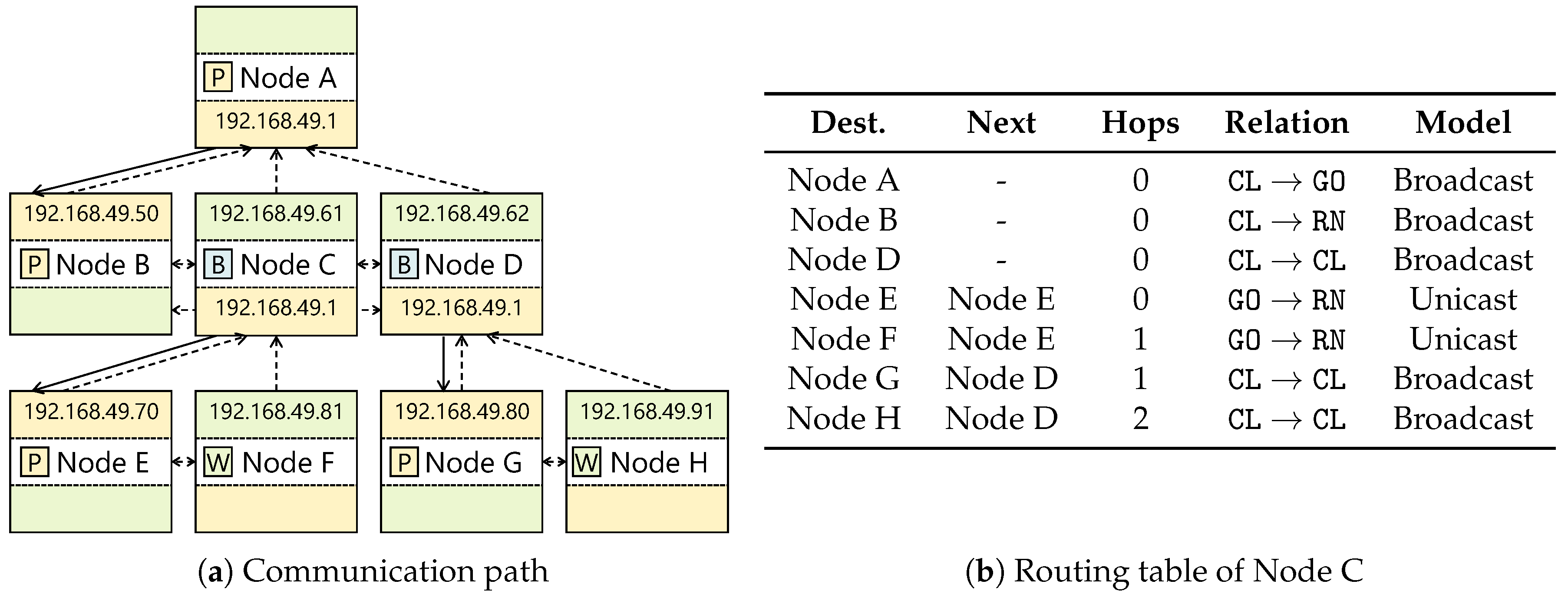
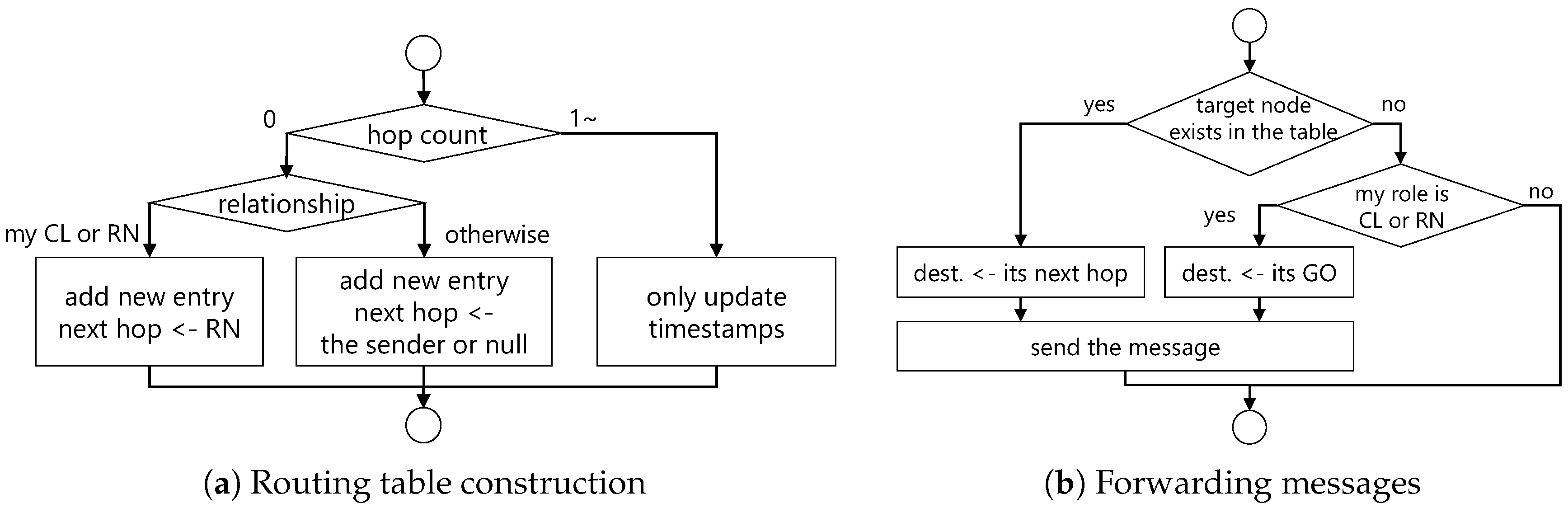
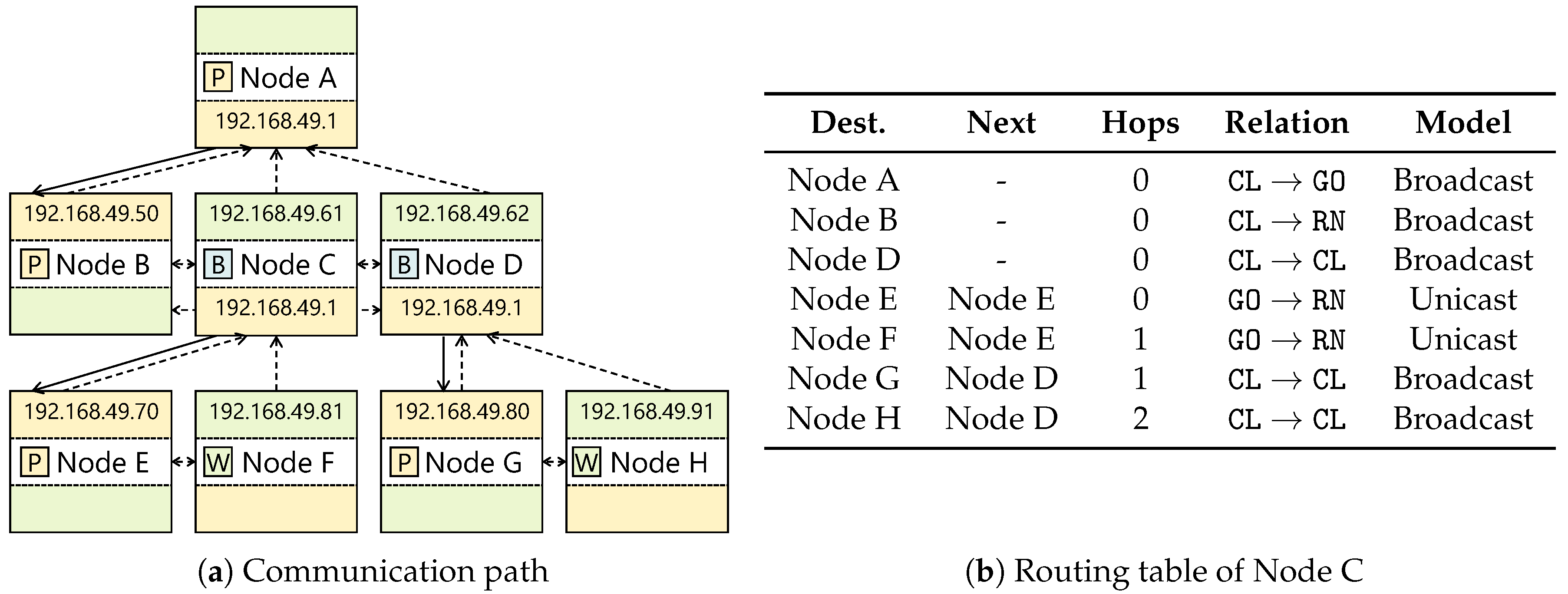
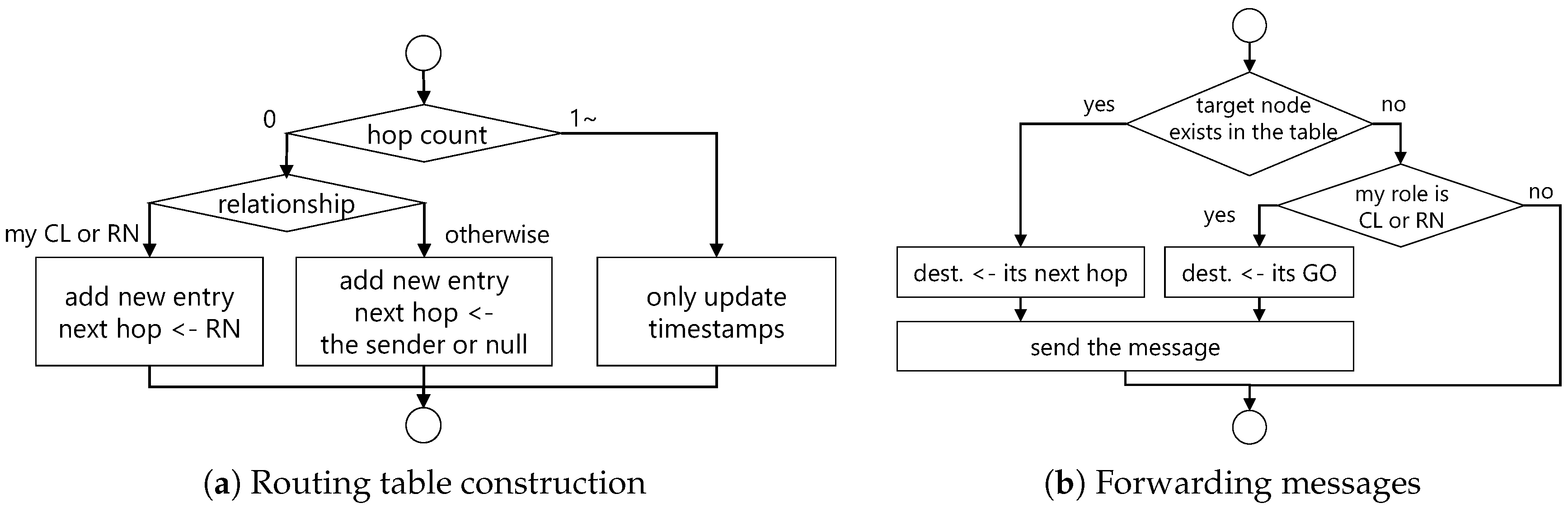
4.2. Multi-Hop Communication Mechanism
- GO
- When a message arrives from devices of its group, the GO updates both the group information and routing table to ensure that group members can always communicate with each other via the RN. When messages arrive from other groups, only their information is updated.
- CL
- When a message arrives from devices of its group, the CL updates the information about both the group and the routing table to ensure that they can always communicate with each other directly. When messages arrive from other groups, only their information is updated.
- RN
- Same as CL.
5. Evaluation
5.1. Implementation of ICOS-Based Application
- IDE: Android Studio 3.0.1
- Compiled SDK: Version 25 (Android 7.1)
- minimum SDK: Version 18 (Android 4.3)
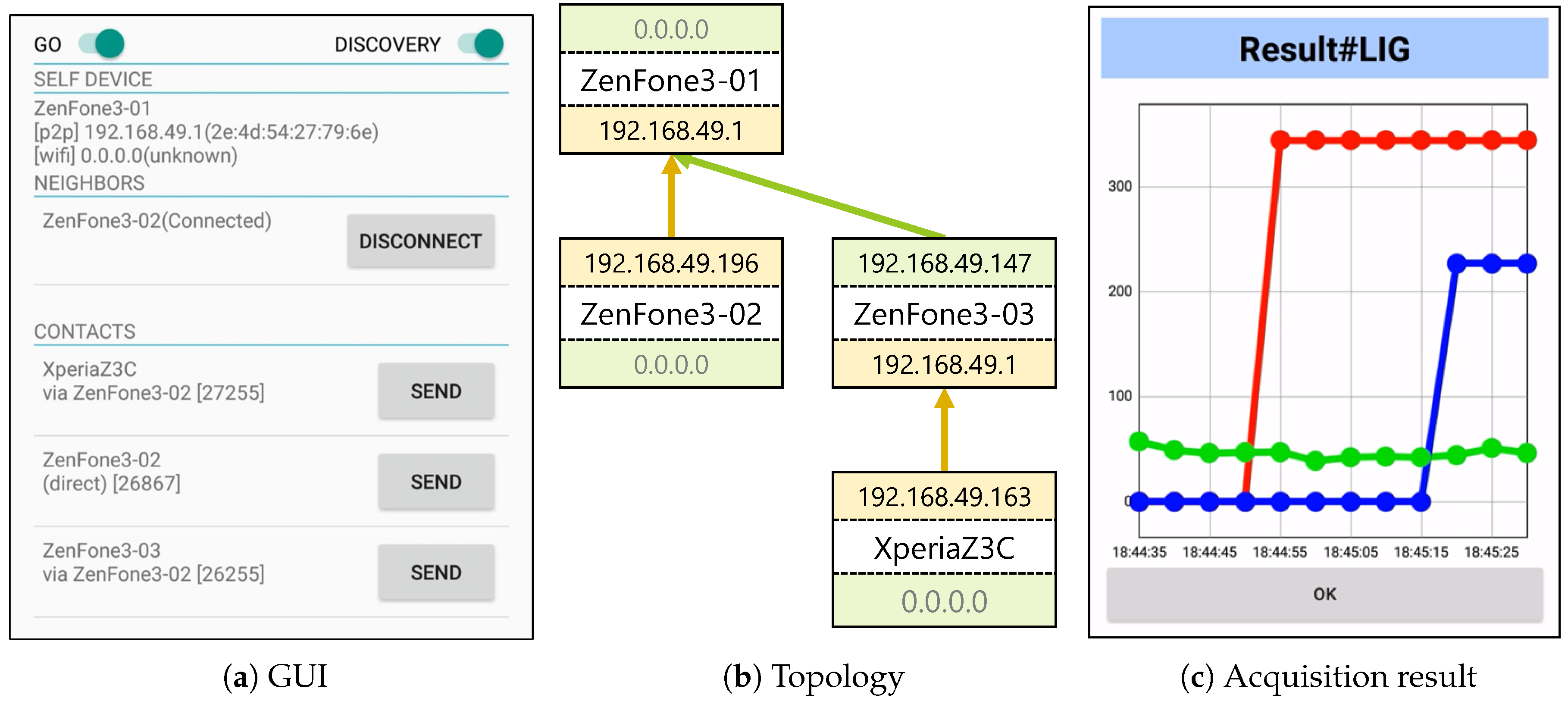
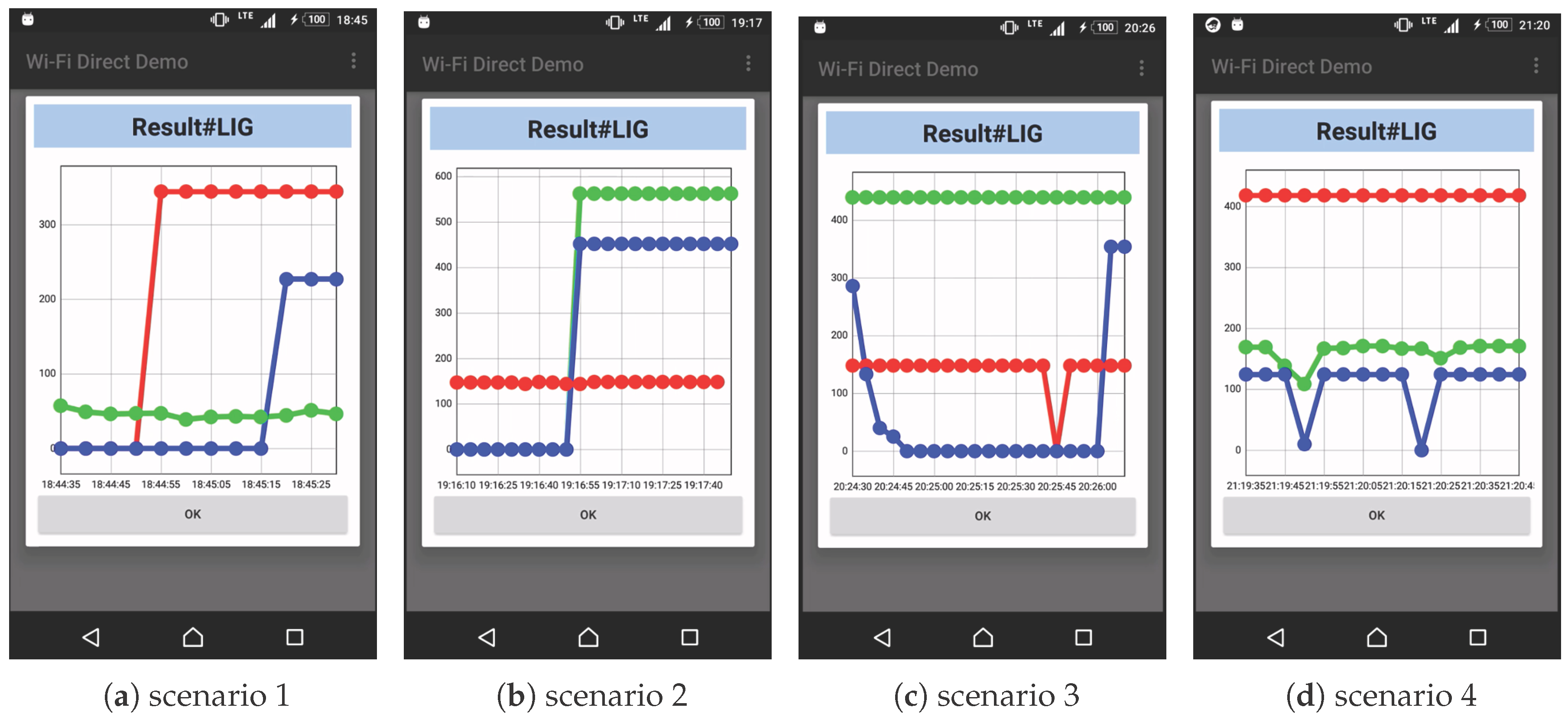
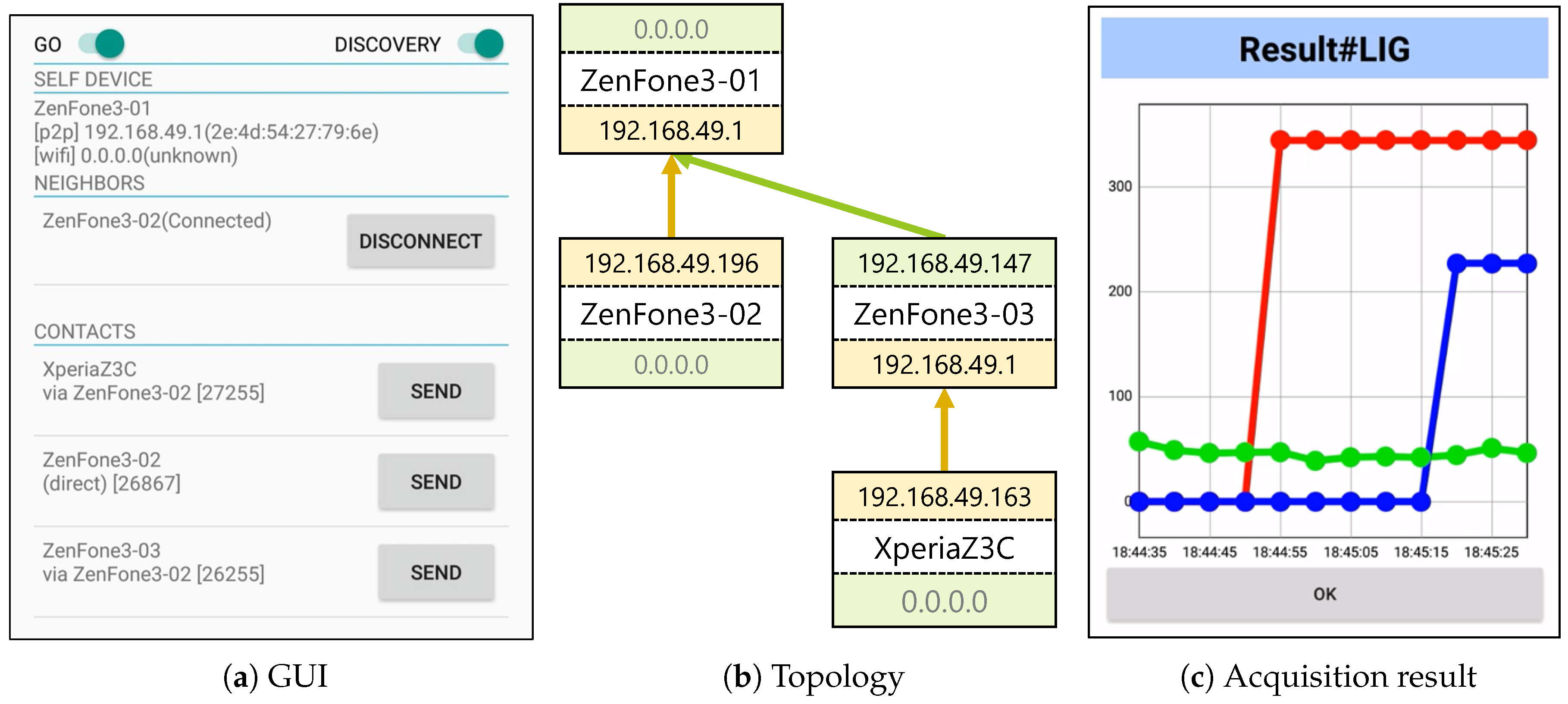
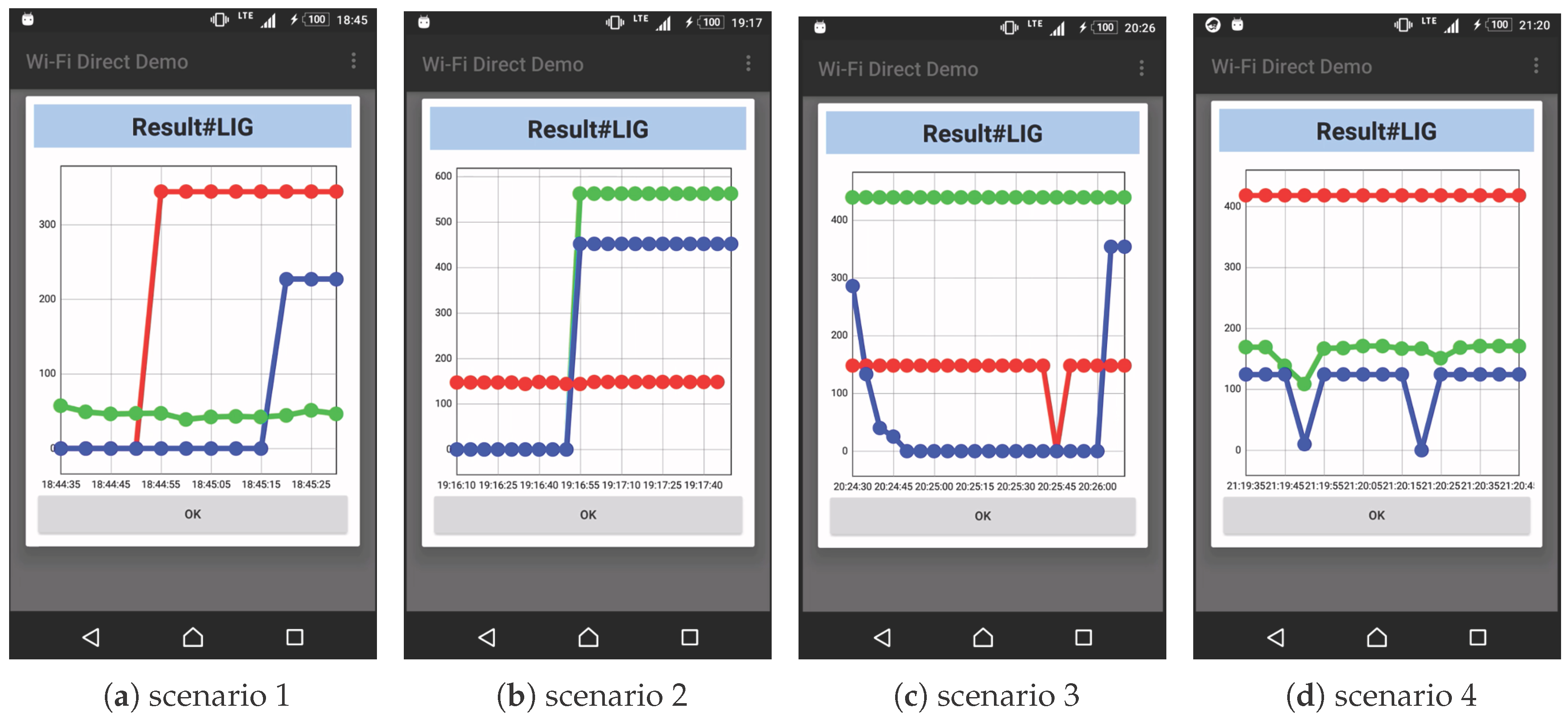
5.2. Operation Verification of Sensor Data Sharing System
5.2.1. Setup
5.2.2. Results
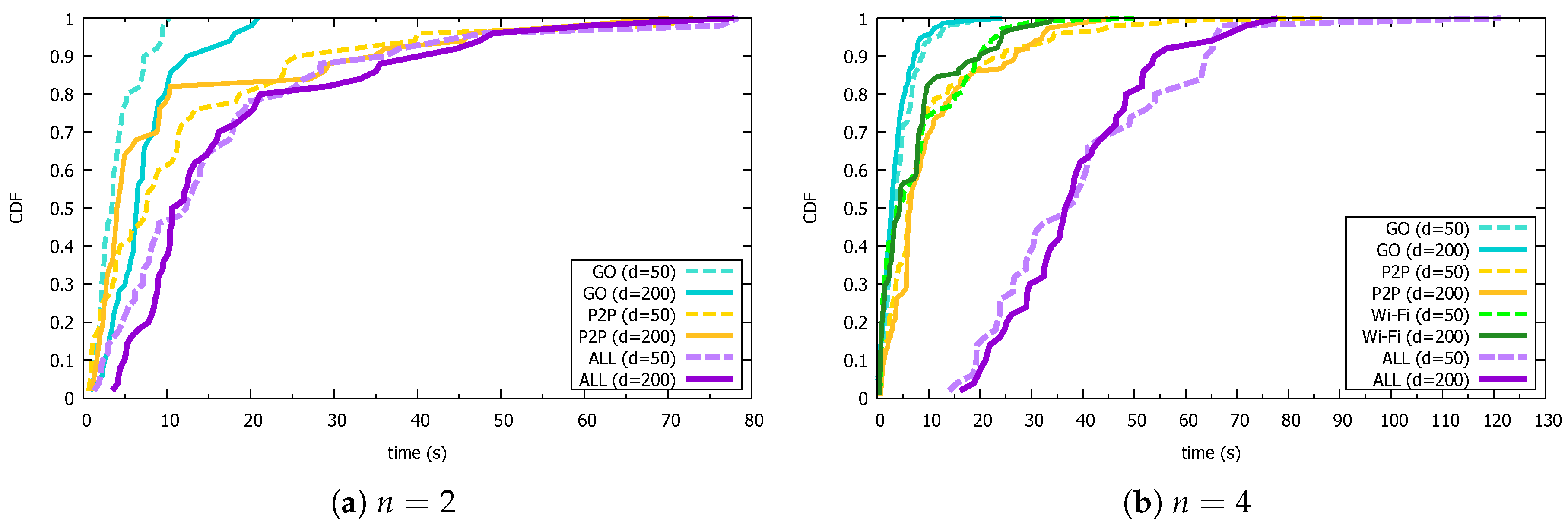
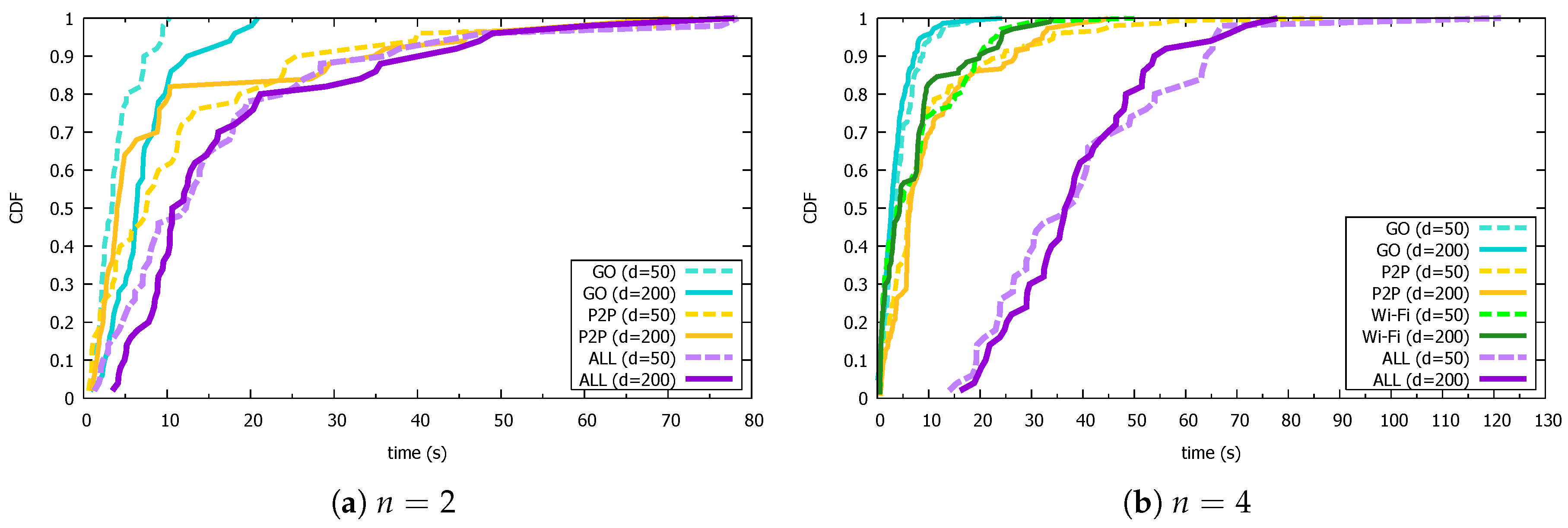
5.3. Performance Evaluation of Topology Construction Mechanism
5.3.1. Setup
5.3.2. Results
5.4. Performance Evaluation of Multi-Hop Communication Mechanism
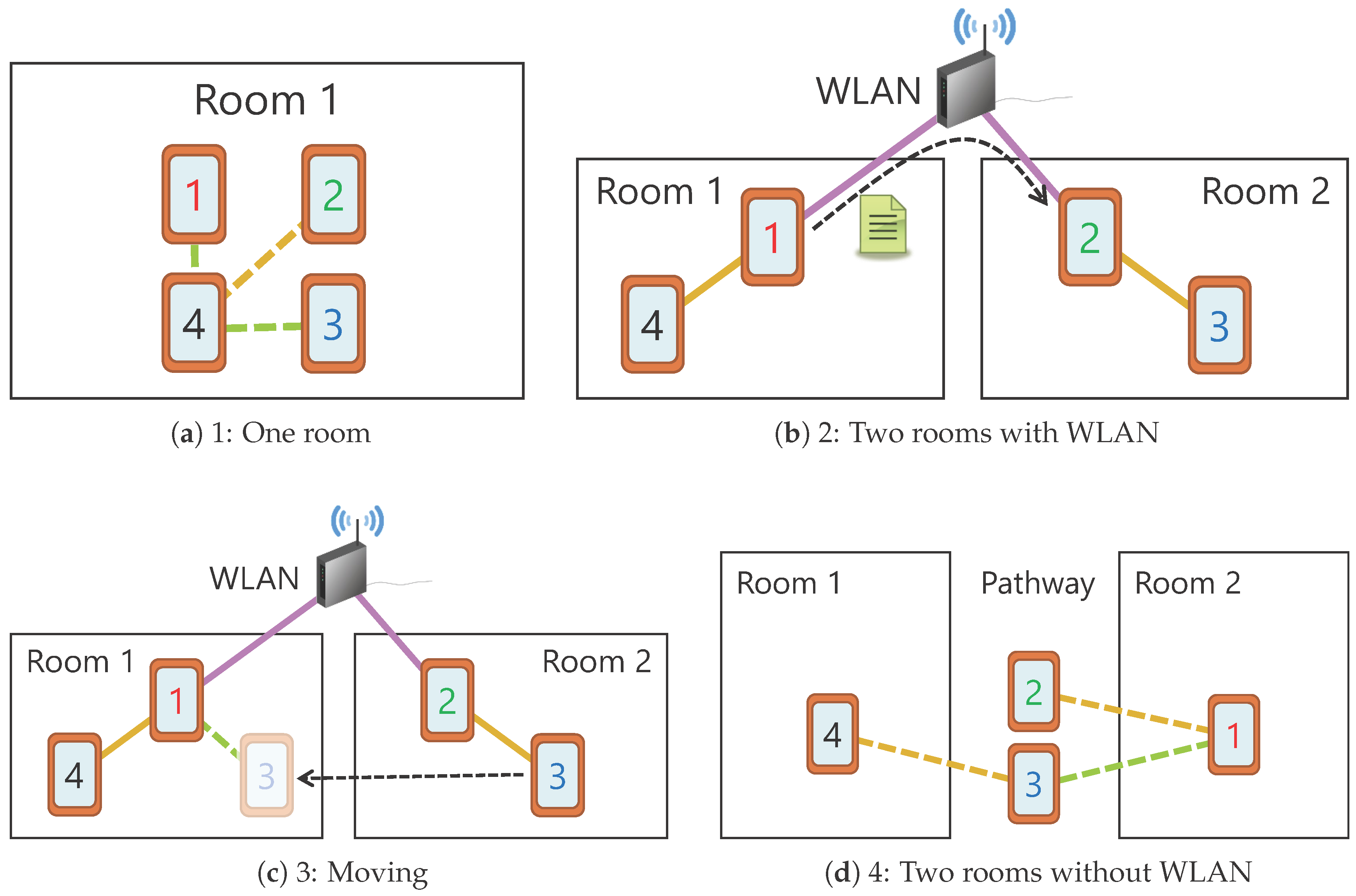
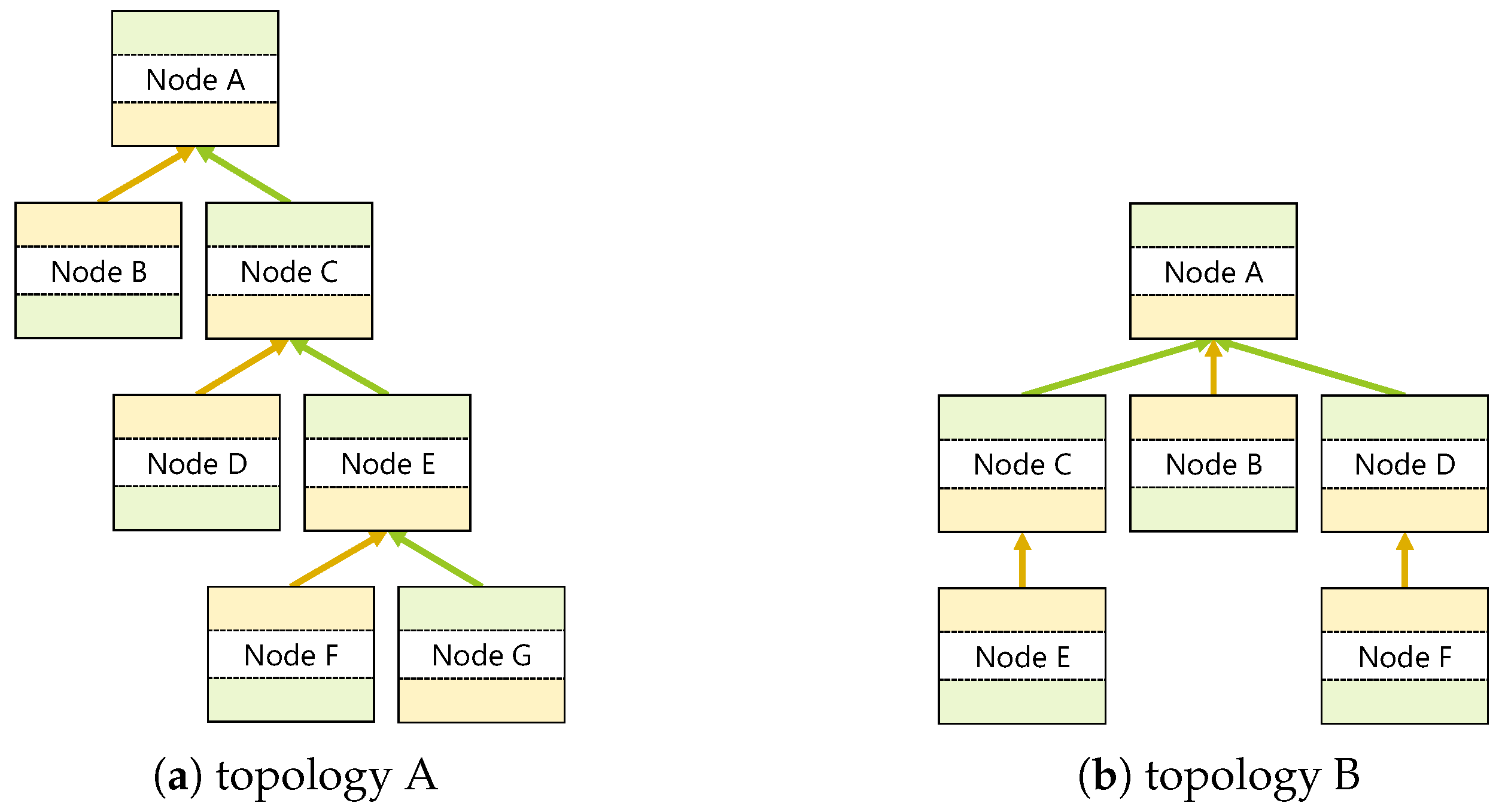
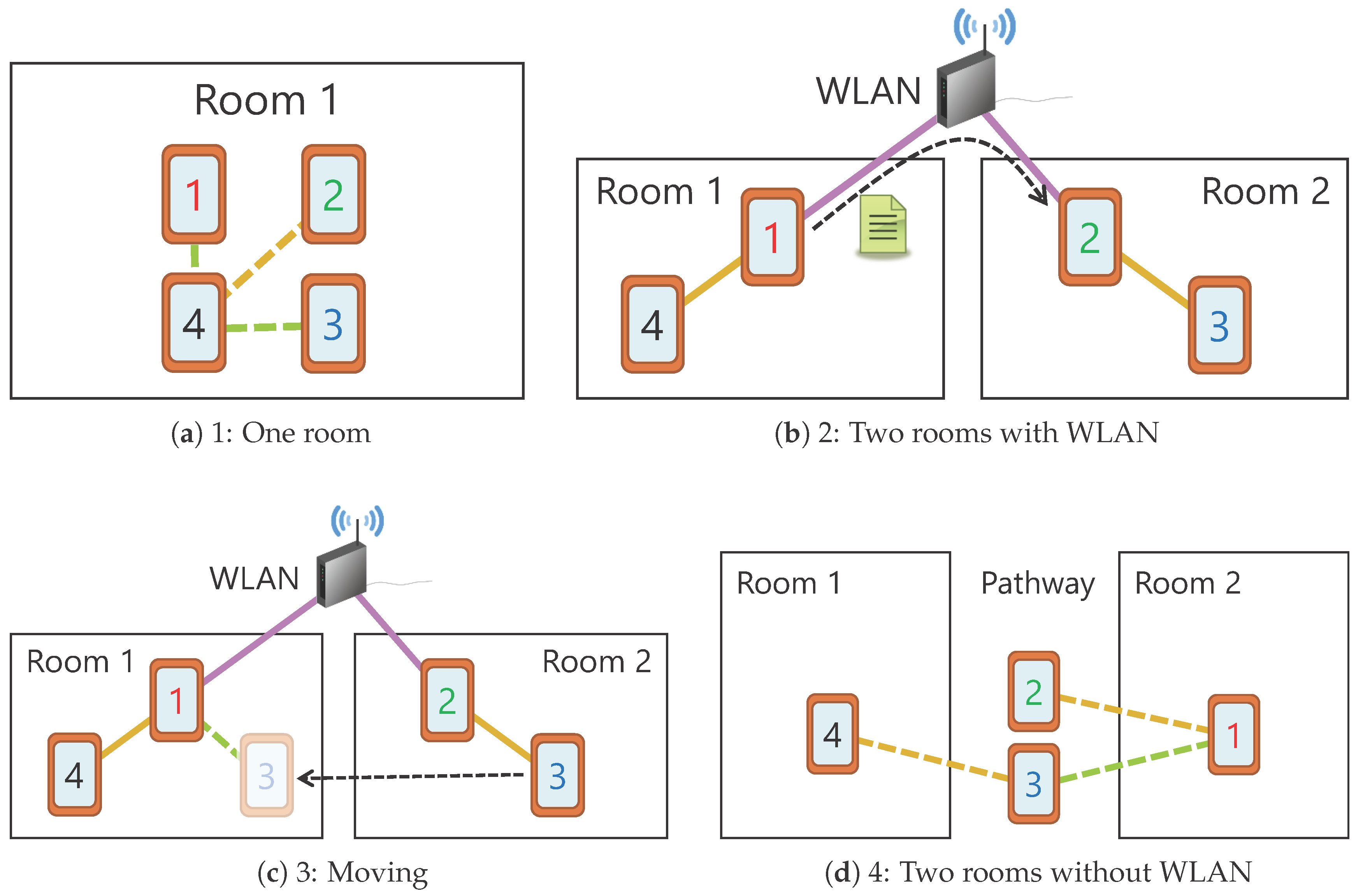
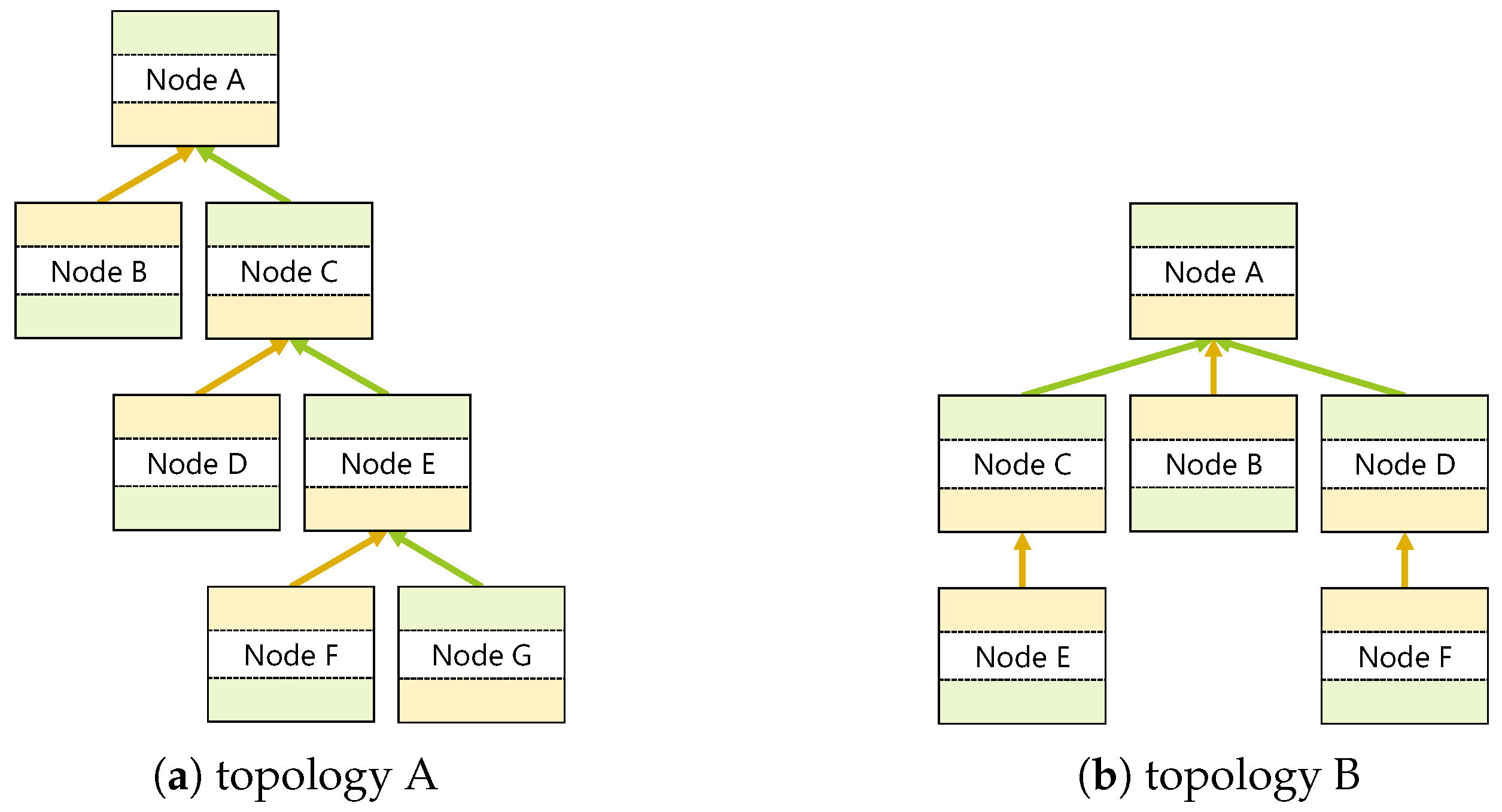
5.4.1. Setup
- Select an arbitrary device as GO and build a new group.
- Attempt to connect to the GO via Wi-Fi Direct from a peripheral device.
- Repeat Step (2) for devices that have become new GOs.
- Repeat Step (3) to build the desired topology.
- Synchronize the routing tables of the devices.
- Exchange messages among all devices and measure the success rates and delays.
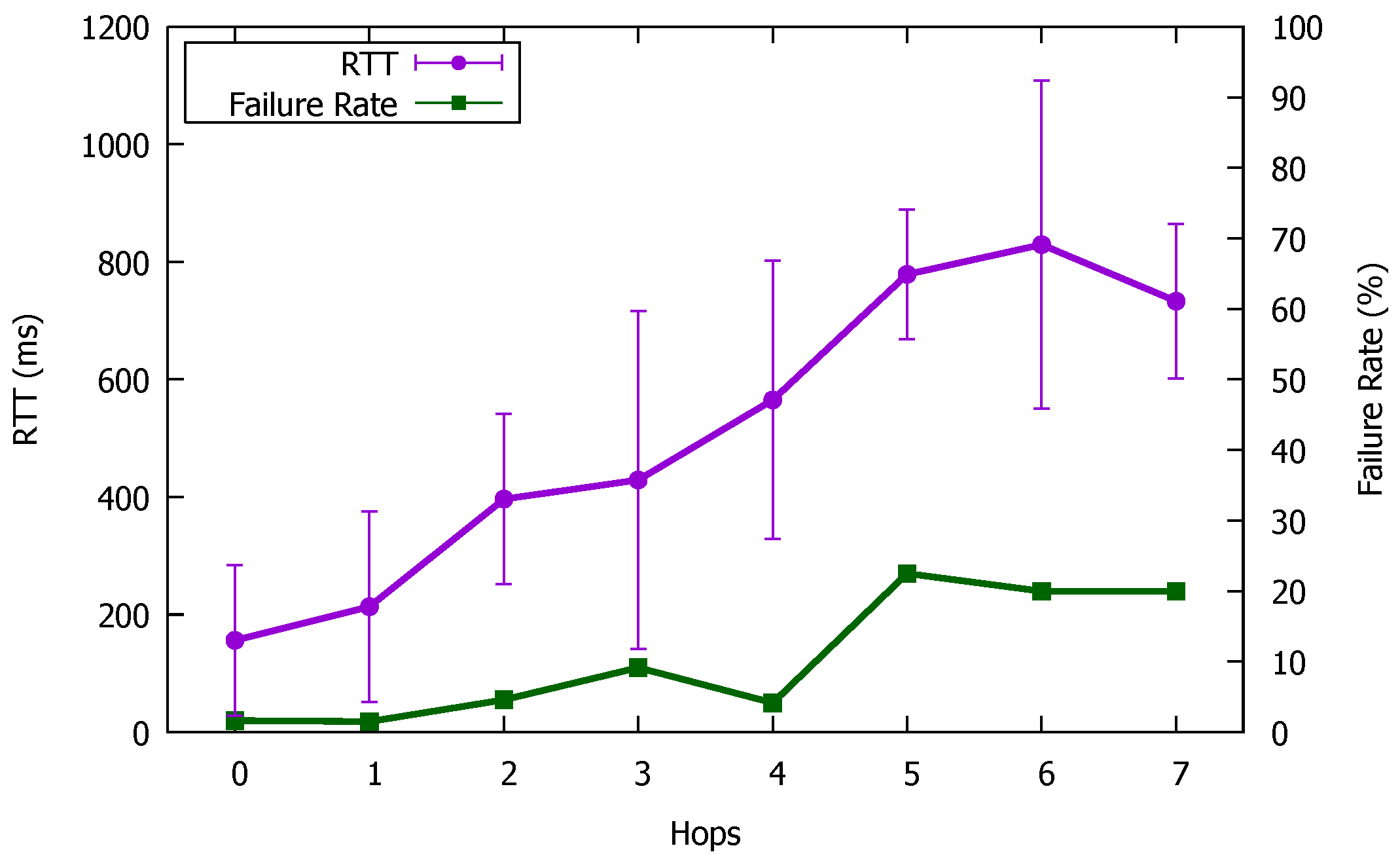
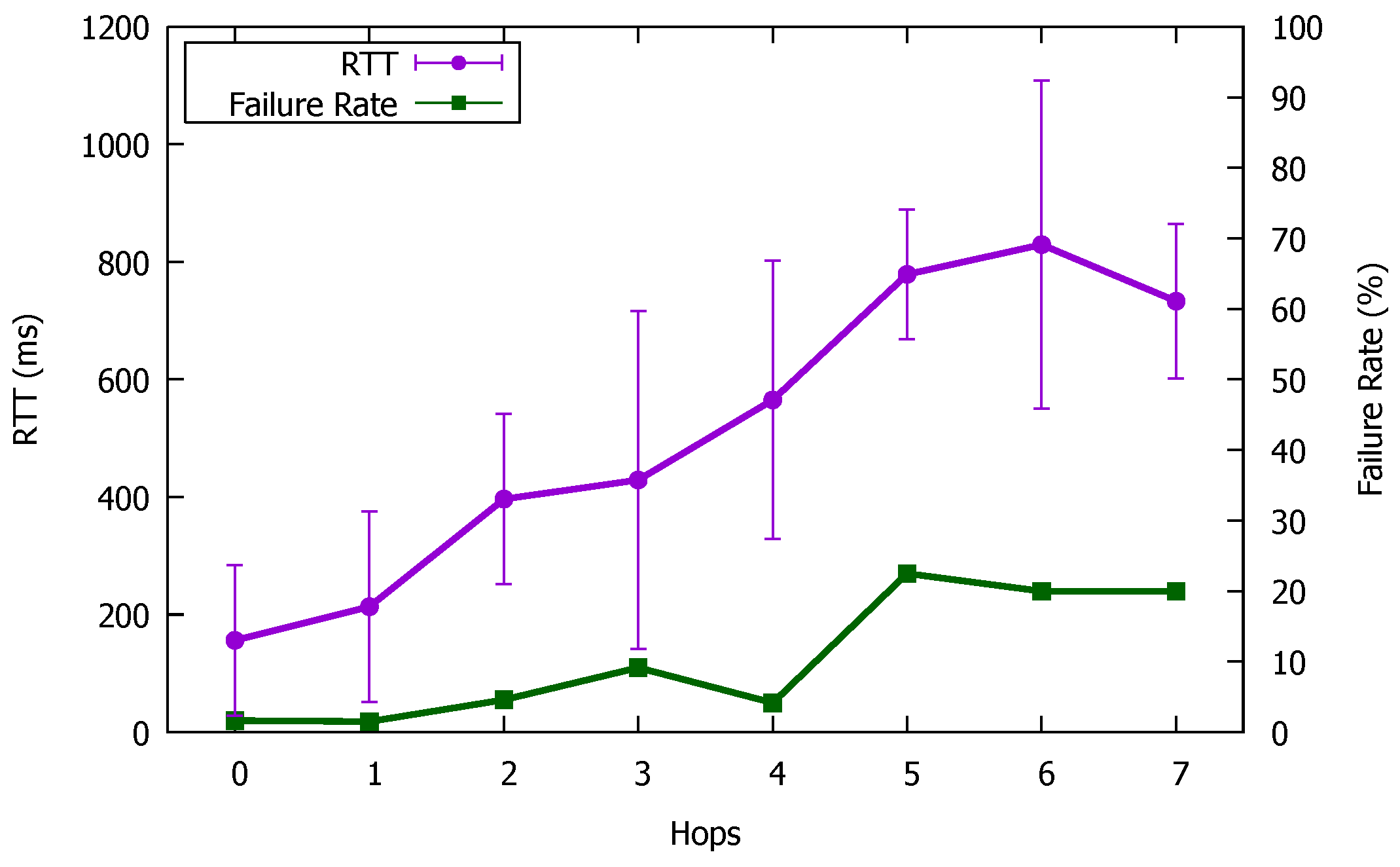
5.4.2. Results
5.5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- NoiseTube. Available online: http://noisetube.net/ (accessed on 16 January 2018).
- Rana, R.K.; Chou, C.T.; Kanhere, S.S.; Bulusu, N.; Hu, W. Ear-Phone: An End-to-End Participatory Urban Noise Mapping System. In Proceedings of the International Conference on Information Processing in Sensor Networks, Stockholm, Sweden, 12–15 April 2010; pp. 105–116. [Google Scholar]
- Sunyoung, K.; Jennifer, M.; Eric, P. Sensr: Evaluating a Flexible Framework for Authoring Mobile Data-collection Tools for Citizen Science. In Proceedings of the 2013 Conference on Computer Supported Cooperative Work, San Antonio, TX, USA, 23–27 February 2013; pp. 1453–1462. [Google Scholar]
- Conti, M.; Boldrini, C.; Kanhere, S.S.; Mingozzi, E.; Pagani, E.; Ruiz, P.M.; Younis, M. From MANET to people-centric networking: Milestones and open research challenges. Comput. Commun. 2015, 71, 1–21. [Google Scholar] [CrossRef]
- Lane, N.D.; Eisenman, S.B.; Musolesi, M.; Miluzzo, E.; Campbell, A.T. Urban Sensing: Opportunistic or Participatory? In Proceedings of the 9th Workshop on Mobile Computing Systems and Applications, Napa, CA, USA, 25–26 February 2008; pp. 11–16. [Google Scholar]
- Oide, T.; Abe, T.; Suganuma, T. COSAP: Contract-Oriented Sensor-Based Application Platform. IEEE Access 2017, 5, 8261–8275. [Google Scholar] [CrossRef]
- Fodor, G.; Dahlman, E.; Mildh, G.; Parkvall, S.; Reider, N.; Miklós, G.; Turányi, Z. Design Aspects of Network Assisted Device-to-Device Communications. IEEE Commun. Mag. 2012, 50, 170–177. [Google Scholar] [CrossRef]
- Felice, M.D.; Bedogni, L.; Bononi, L. The Emergency Direct Mobile App: Safety Message Dissemination over a Multi-Group Network of Smartphones Using Wi-Fi Direct. In Proceedings of the ACM International Symposium on Mobility Management and Wireless Access, Malta, 13–17 November 2016; pp. 99–106. [Google Scholar]
- Wang, Y.; Tang, J.; Jin, Q.; Ma, J. BWMesh: A Multi-hop Connectivity Framework on Android for Proximity Service. In Proceedings of the IEEE International Conference on Ubiquitous Intelligence and Computing and IEEE International Conference on Autonomic and Trusted Computing and IEEE International Conference on Scalable Computing and Communications and Its Associated Workshops (UIC-ATC-ScalCom), Beijing, China, 10–14 August 2015; pp. 278–283. [Google Scholar]
- Kantar: iOS and Android Push towards a Two-OS World. Available online: https://www.kantarworldpanel.com/global/News/iOS-and-Android-push-towards-a-Two-OS-world (accessed on 16 January 2018).
- Google: Android Developers Dashboards. Available online: https://developer.android.com/about/dashboards (accessed on 16 January 2018).
- GPP Release 12. Available online: http://www.3gpp.org/release-12 (accessed on 26 February 2018).
- Nardini, G.; Stea, G.; Virdis, A. A Fast and Reliable Broadcast Service for LTE-Advanced Exploiting Multihop Device-to-Device Transmissions. Future Internet 2017, 9, 89. [Google Scholar] [CrossRef]
- Wi-Fi Direct Alliance. Available online: http://www.wi-fi.org/discover-wi-fi/wi-fi-direct (accessed on 21 June 2017).
- Liu, K.; Shen, W.; Yin, B.; Cao, X.; Cai, L.X.; Cheng, Y. Development of Mobile Ad-hoc Networks over Wi-Fi Direct with Off-the-Shelf Android Phones. In Proceedings of the IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–6. [Google Scholar]
- Feng, D.; Lu, L.; Yuan-Wu, Y.; Li, G.Y.; Li, S.; Feng, G. Device-to-Device Communications in Cellular Networks. IEEE Commun. Mag. 2014, 52, 49–55. [Google Scholar] [CrossRef]
- Shahin, A.A.; Younis, M. Efficient Multi-Group Formation and Communication Protocol for Wi-Fi Direct. In Proceedings of the IEEE 40th Conference on Local Computer Networks, Clearwater Beach, FL, USA, 26–29 October 2015; pp. 233–236. [Google Scholar]
- Casetti, C.; Chiasserini, C.F.; Pelle, L.C.; Valle, C.D.; Duan, Y.; Giaccone, P. Content-centric Routing in Wi-Fi Direct Multi-group Networks. In Proceedings of the IEEE International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Boston, MA, USA, 14–17 June 2015; pp. 1–9. [Google Scholar]
- Casetti, C.; Chiasserini, C.F.; Pelle, L.C.; Valle, C.D.; Duan, Y.; Giaccone, P. A Demonstration for Content Delivery on Wi-Fi Direct Enabled Devices. In Proceedings of the IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Boston, MA, USA, 14–17 June 2015; pp. 1–2. [Google Scholar]
- Casetti, C.; Chiasserini, C.F.; Duan, Y.; Giaccone, P.; Manriquez, A.P. Data Connectivity and Smart Group Formation in Wi-Fi Direct Multi-group Networks. IEEE Trans. Netw. Serv. Manag. 2017. [Google Scholar] [CrossRef]
- Teófilo, A.; Remédios, D.; Paulino, H.; Lourenço, J. Group-to-Group Bidirectional Wi-Fi Direct Communication with Two Relay Nodes. In Proceedings of the 12th EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, Coimbra, Portugal, 22–24 July 2015; pp. 275–276. [Google Scholar]
- Funai, C.; Tapparello, C.; Heinzelman, W. Enabling Multi-hop Ad Hoc Networks Through WiFi Direct Multi-group Networking. In Proceedings of the International Conference on Computing, Networking and Communications, Santa Clara, CA, USA, 26–29 January 2017; pp. 491–497. [Google Scholar]
- Camps-Mur, D.; Garcia-Saavedra, A.; Serrano, P. Device-to-Device Communications with Wi-Fi Direct: Overview and Experimentation. IEEE Wirel. Commun. 2013, 20, 96–104. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Y.; Tan, C.C. WD2: An Improved WiFi-Direct Group Formation Protocol. In Proceedings of the ACM MobiCom Workshop on Challenged Networks, Maui, HI, USA, 7 September 2014; pp. 55–60. [Google Scholar]
- Yao, C.; Zhang, H.; Song, L. Demo: WiFi Multihop: Implementing Device-to-Device Local Area Networks by Android Smartphones. In Proceedings of the ACM ACM International Symposium on Mobile Ad Hoc Networking and Computing, Hangzhou, China, 22–25 June 2015; pp. 405–406. [Google Scholar]
- Menegato, U.B.; Cimino, L.D.S.; Delabrida, S.; Medeiros, F.A.; de Castro Lima, J.; Oliveira, R.A.R. Dynamic Clustering in WiFi Direct Technology. In Proceedings of the ACM International Symposium on Mobility Management and Wireless Access, Montreal, QC, Canada, 21–26 September 2014; pp. 25–29. [Google Scholar]
- Laha, A.; Cao, X.; Shen, W.; Tian, X.; Cheng, Y. An Energy Efficient Routing Protocol for Device-to-Device Based Multihop Smartphone Networks. In Proceedings of the IEEE International Conference on Communications, London, UK, 8–12 June 2015; pp. 5448–5453. [Google Scholar]
- Cherif, W.; Khan, M.A.; Filali, F.; Sharafeddine, S.; Dawy, Z. P2P Group Formation Enhancement for Opportunistic Networks with Wi-Fi Direct. In Proceedings of the IEEE Wireless Communications and Networking Conference, San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Khan, M.A.; Cherif, W.; Filali, F. Group Owner Election in Wi-Fi Direct. In Proceedings of the IEEE Annual Ubiquitous Computing, Electronics Mobile Communication Conference, New York, NY, USA, 20–22 October 2016; pp. 1–9. [Google Scholar]
- Marinho, R.P.; Menegato, U.B.; Oliveira, R.A.R. IMSN Routing on Wi-Fi Direct Enabled Devices. In Proceedings of the ACM International Symposium on Mobility Management and Wireless Access, Cancun, Mexico, 2–6 November 2015; pp. 31–38. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Product Name | Device Name | Version |
|---|---|---|---|
| 1 | ZenFone3 | ZenFone3-01 | 7.0 |
| 2 | ZenFone3 | ZenFone3-02 | 7.0 |
| 3 | ZenFone3 | ZenFone3-03 | 7.0 |
| 4 | Xperia Z3 Compact | XperiaZ3C | 6.0.1 |
| 5 | GALAXY S4 | SC-04E-01 | 5.0.1 |
| 6 | GALAXY S4 | SC-04E-02 | 5.0.1 |
| 7 | Ascend G620S | HUAWEI-01 | 4.4.4 |
| src. \ dst. | A | B | C | D | E | F | G |
|---|---|---|---|---|---|---|---|
| A | -/- | 114/0 | 126/0 | 260/1 | 439/1 | 661/1 | 758/5 |
| B | 55/0 | -/- | 146/1 | 388/1 | 593/5 | 758/3 | 925/4 |
| C | 130/0 | 182/1 | -/- | 187/0 | 225/0 | 400/2 | 535/1 |
| D | 441/4 | 356/3 | 33/0 | -/- | 74/0 | 309/0 | 511/2 |
| E | 575/0 | 589/4 | 224/1 | 208/0 | -/- | 127/0 | 210/0 |
| F | 873/0 | 804/6 | 331/3 | 357/0 | 90/0 | -/- | 148/0 |
| G | 712/3 | 918/11 | 503/0 | 461/0 | 165/0 | 112/0 | -/- |
| src. \ dst. | A | B | C | D | E | F |
|---|---|---|---|---|---|---|
| A | -/- | 127/0 | 308/0 | 276/0 | 298/0 | 565/0 |
| B | 28/0 | -/- | 302/2 | 241/0 | 338/0 | 303/0 |
| C | 267/0 | 325/0 | -/- | 345/2 | 51/0 | 550/0 |
| D | 203/2 | 250/2 | 355/0 | -/- | 345/2 | 157/0 |
| E | 317/0 | 426/2 | 58/0 | 424/1 | -/- | 761/0 |
| F | 441/1 | 458/2 | 507/0 | 87/0 | 753/3 | -/- |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oide, T.; Abe, T.; Suganuma, T. Infrastructure-Less Communication Platform for Off-The-Shelf Android Smartphones. Sensors 2018, 18, 776. https://doi.org/10.3390/s18030776
Oide T, Abe T, Suganuma T. Infrastructure-Less Communication Platform for Off-The-Shelf Android Smartphones. Sensors. 2018; 18(3):776. https://doi.org/10.3390/s18030776
Chicago/Turabian StyleOide, Takuma, Toru Abe, and Takuo Suganuma. 2018. "Infrastructure-Less Communication Platform for Off-The-Shelf Android Smartphones" Sensors 18, no. 3: 776. https://doi.org/10.3390/s18030776
APA StyleOide, T., Abe, T., & Suganuma, T. (2018). Infrastructure-Less Communication Platform for Off-The-Shelf Android Smartphones. Sensors, 18(3), 776. https://doi.org/10.3390/s18030776