Magnetometer and Gyroscope Calibration Method with Level Rotation


Abstract
1. Introduction
2. System Modeling and Filter
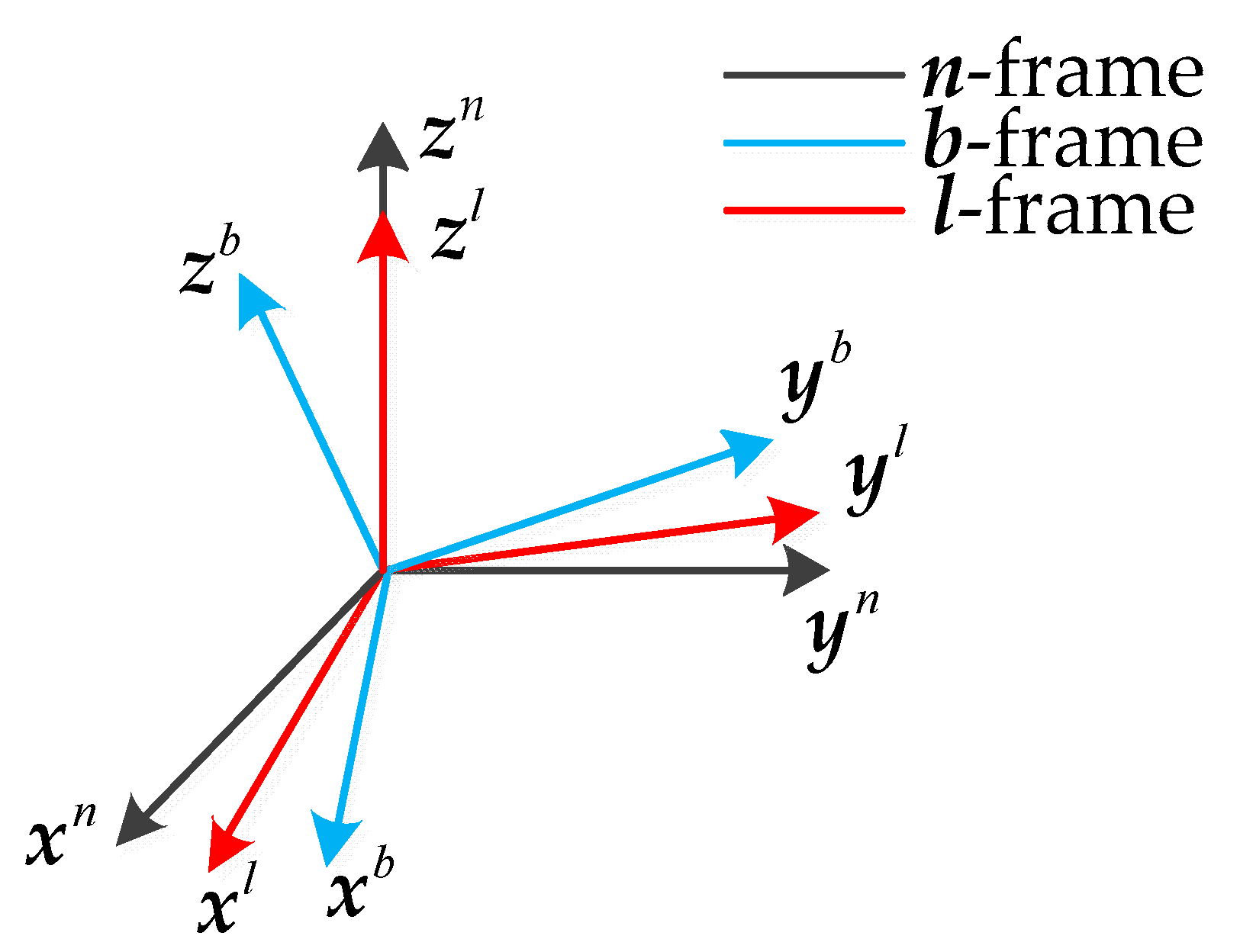
- Navigation frame (n-frame): The navigation frame is located on the vehicle. It points to the east, north, and upward.
- Body frame (b-frame): The body frame is fixed to the vehicle. Its x-axis and y-axis point to the right and forward of the vehicle, and its z-axis follows the right-hand rule.
- Leveled frame (l-frame): The leveled frame is also located on the vehicle. It is the frame by leveling b-frame such that its z-axis is parallel to the upward vertical and possesses an error angle with respect to the n-frame.
2.1. Magnetometer Model
2.2. Gyroscope Model
2.3. Filter Algorithm
3. Simulation Test
3.1. Reference Algorithm
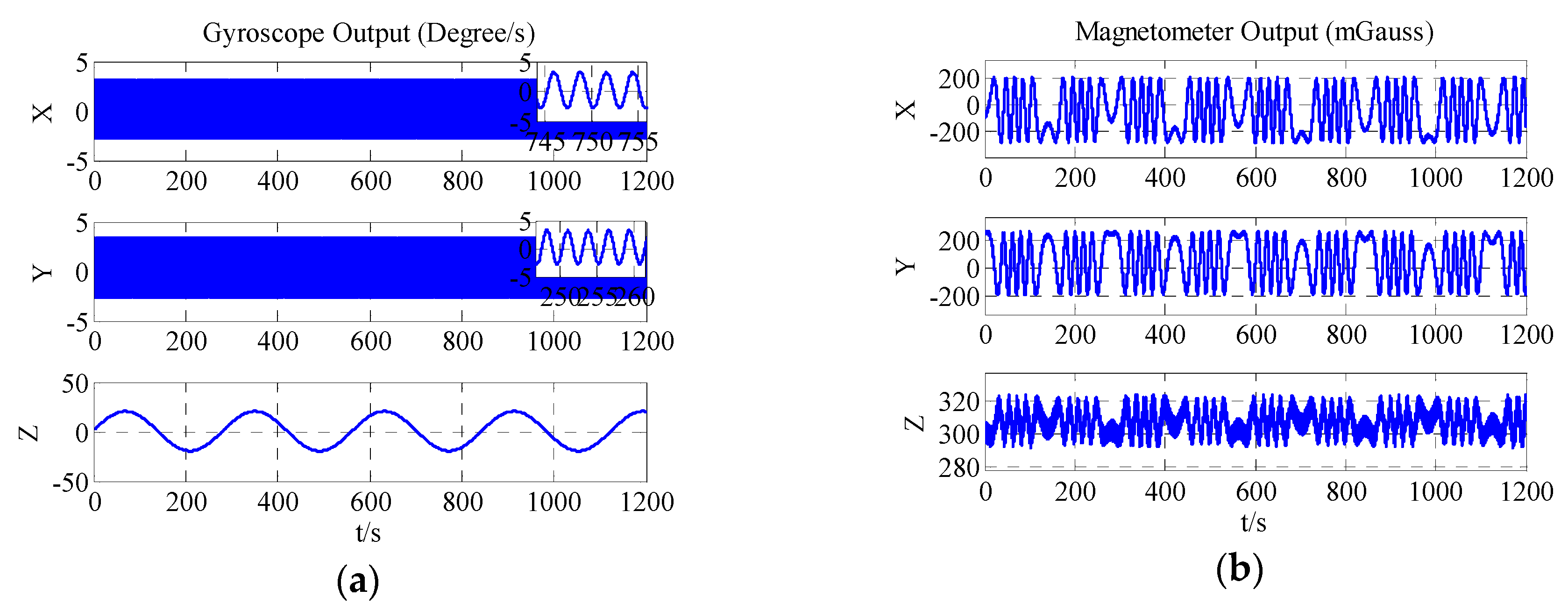
3.2. Simulation Setting
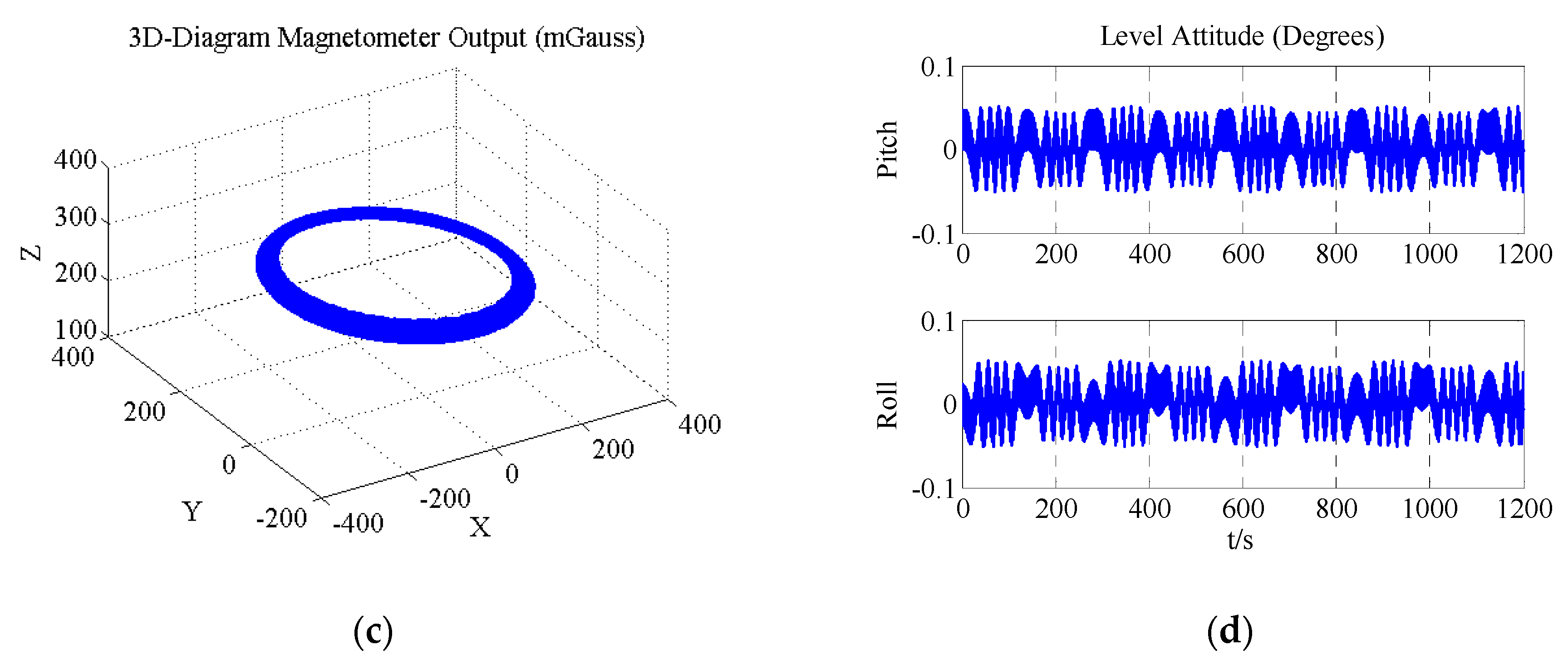
- The level attitude can be gained through accelerometer measures of the orientation of gravity. This method has high precision and stability when static, but cannot guarantee those advantages in dynamic conditions.
- The gyroscope can update a known attitude by several methods, including quaternions. The advantage is high precision and stability over a short period of time. It is prone to accumulate errors over longer time periods.
- An integrated navigation system can provide the precision attitude by integrating different sensors with integration algorithms such as KF and EKF, and so on. These sensors may include a gyroscope, accelerometer, odometer, GNSS, Wi-Fi, etc. This method can guarantee high precision and stability over a long time period, and can be applied in any environment if a suitable integration algorithm is chosen.
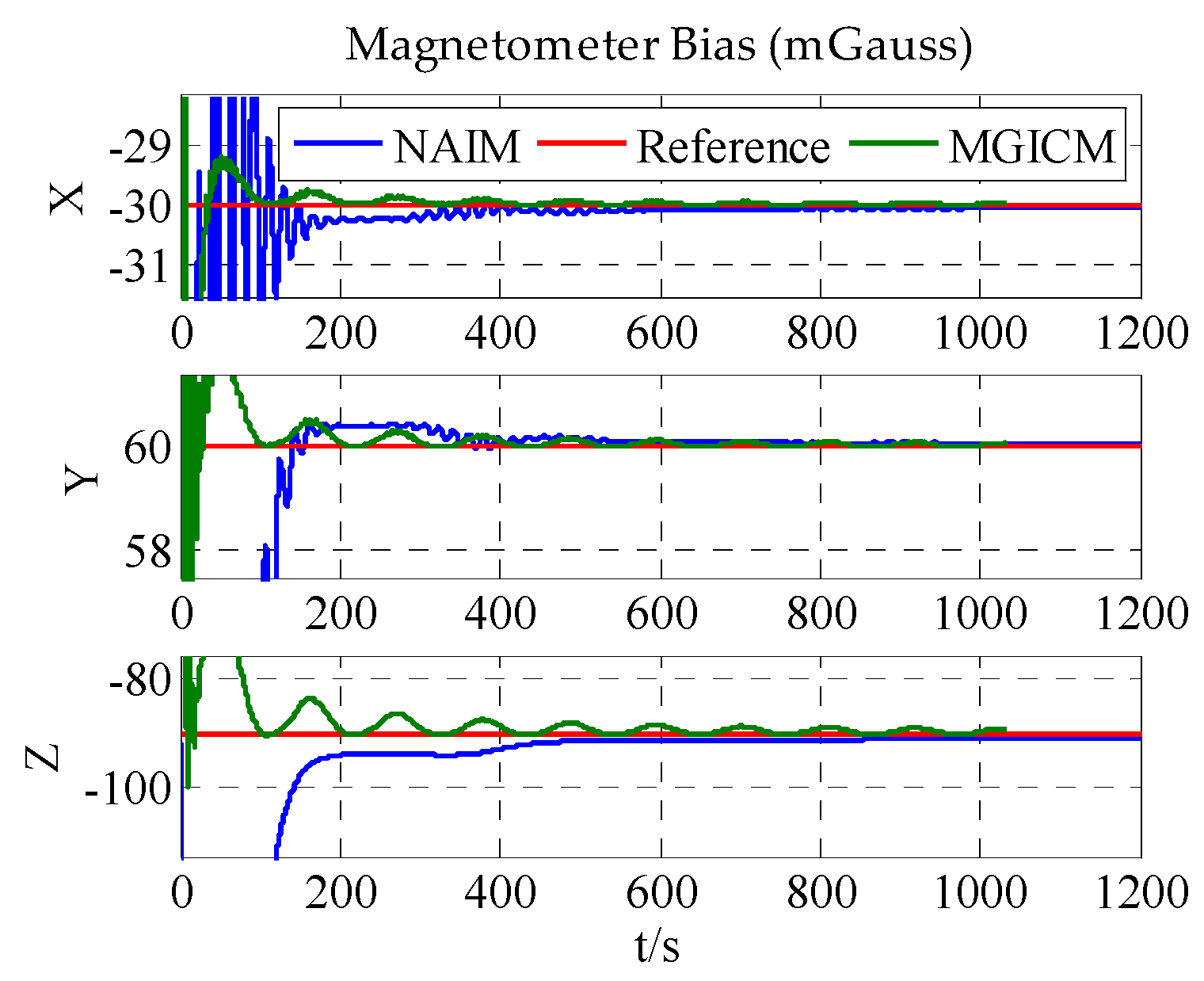
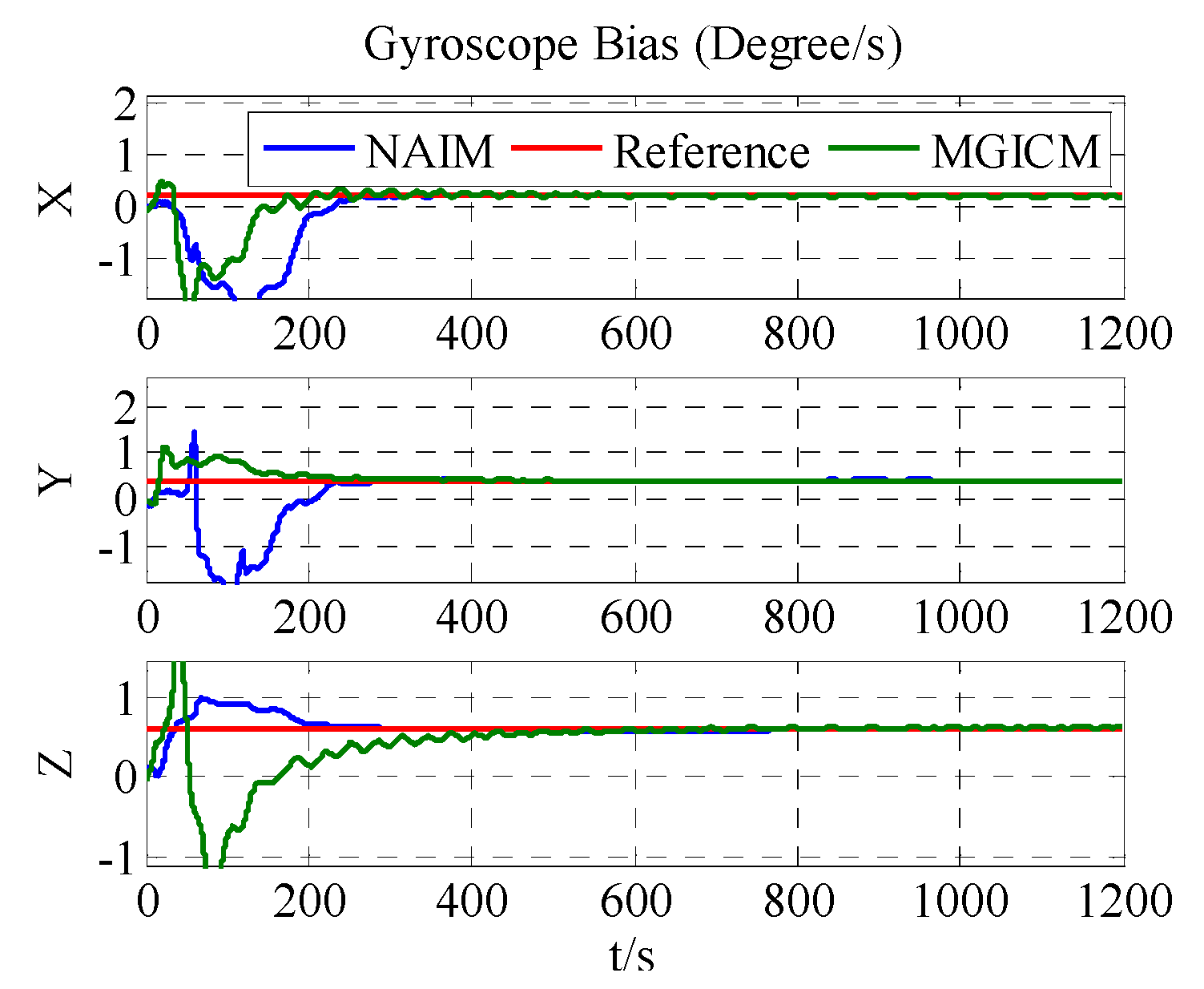
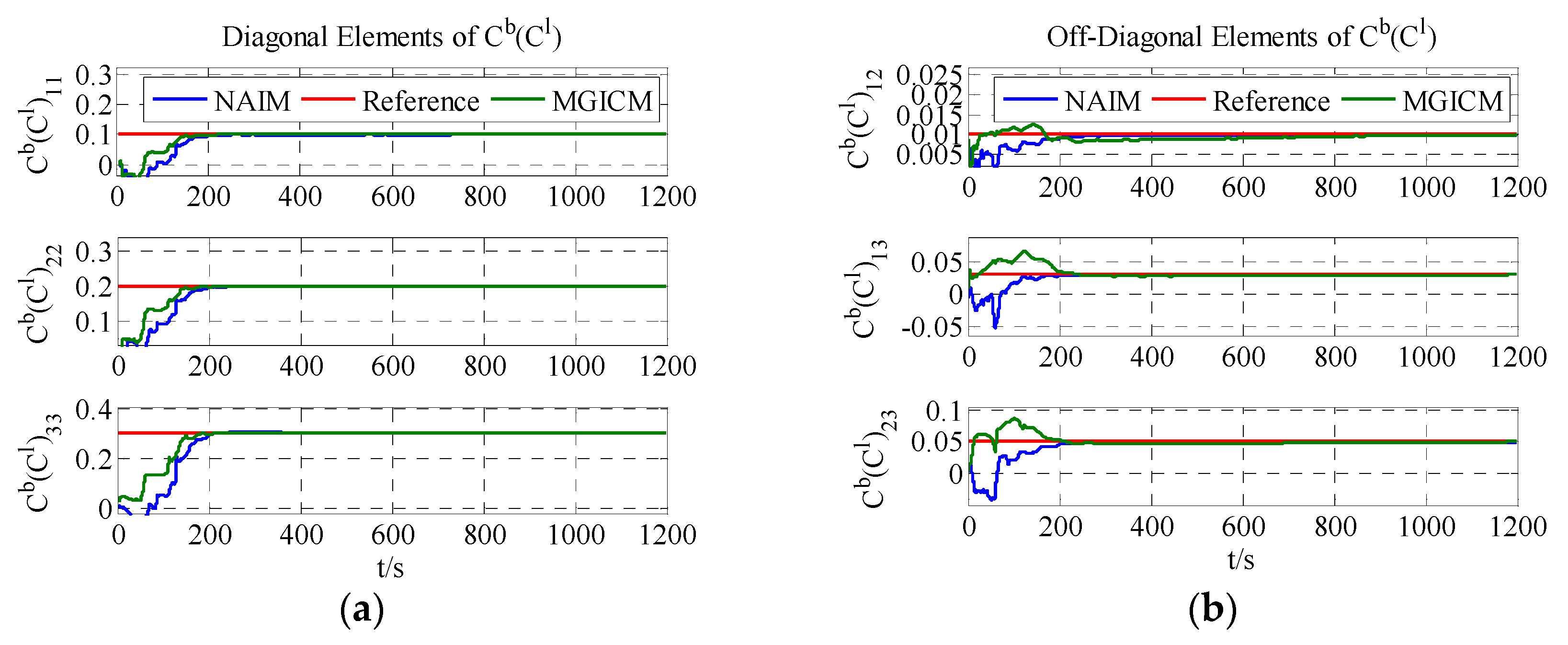
3.3. Simulation Result
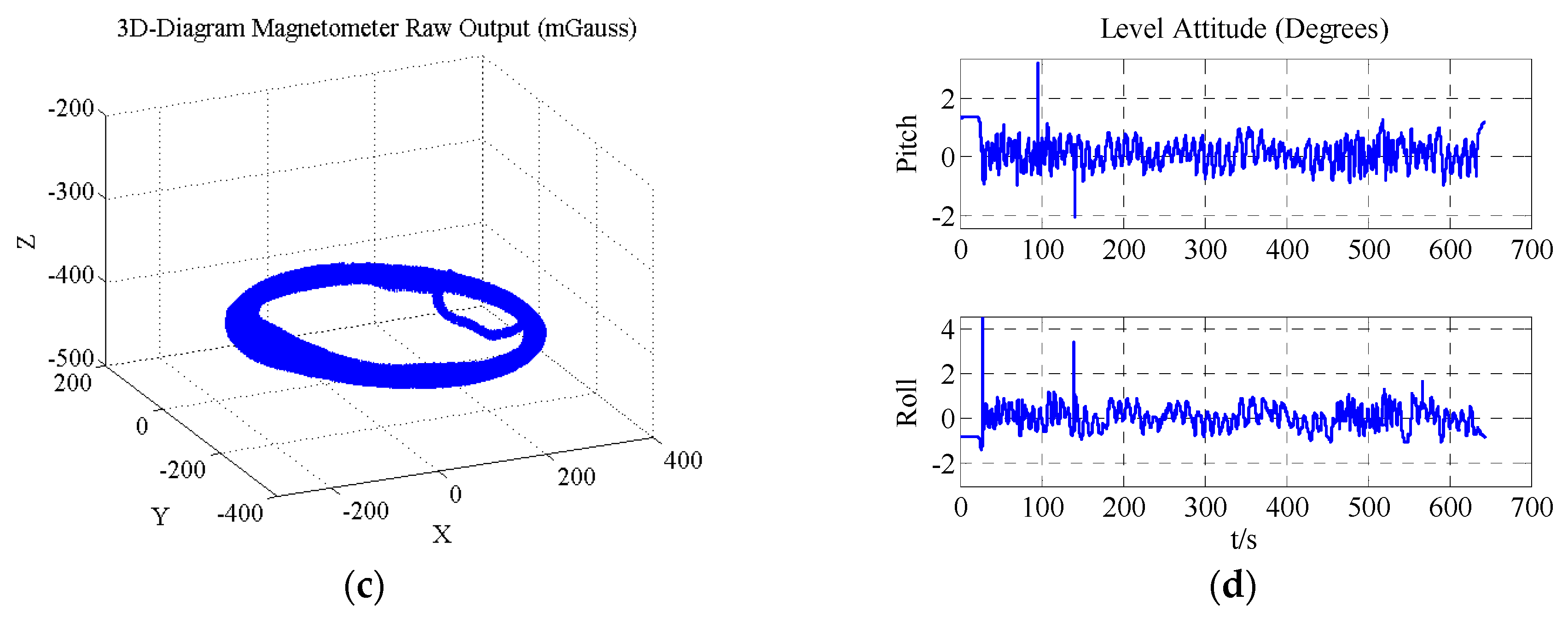
4. Experimental Test
4.1. Test Condition
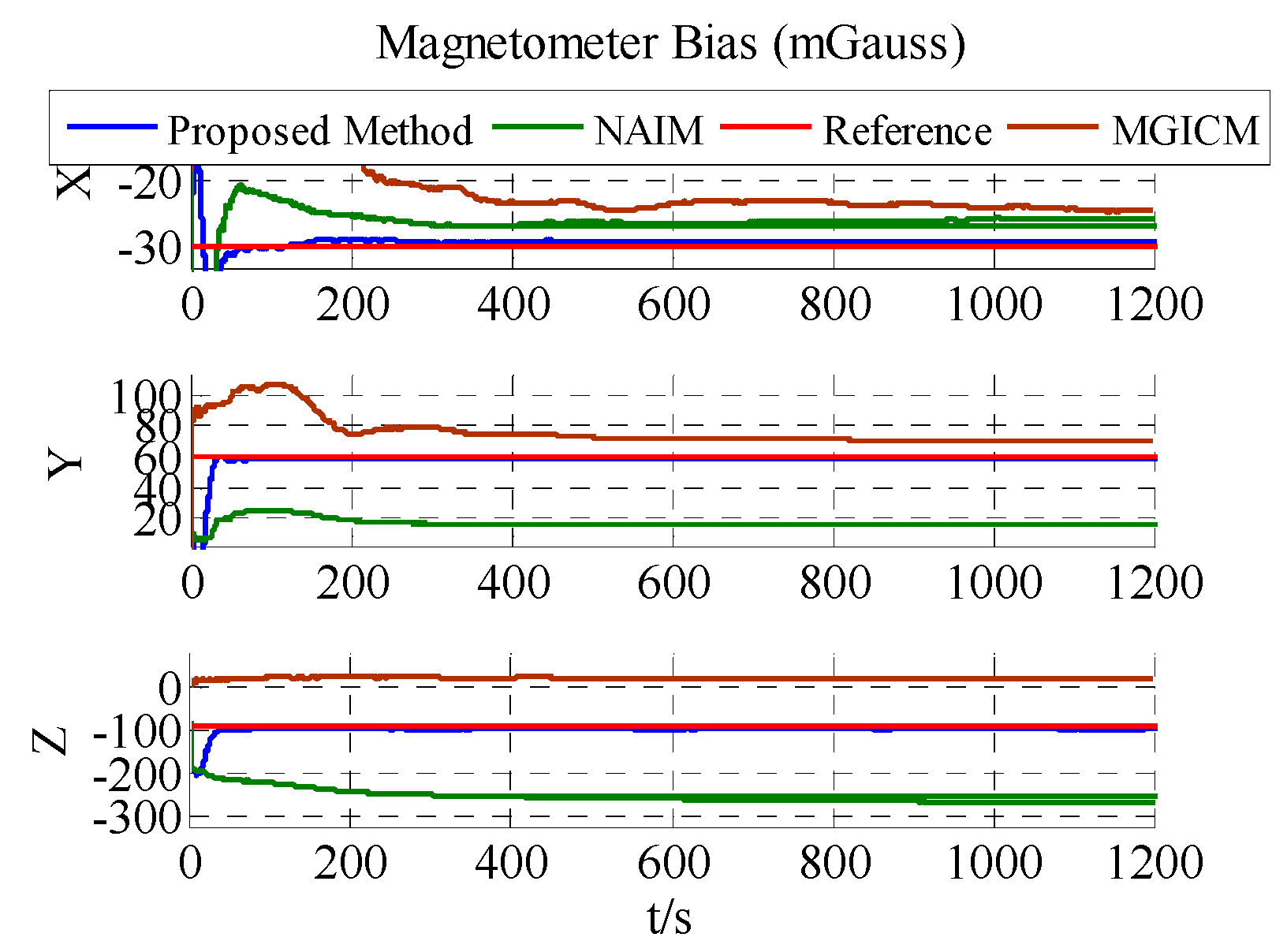
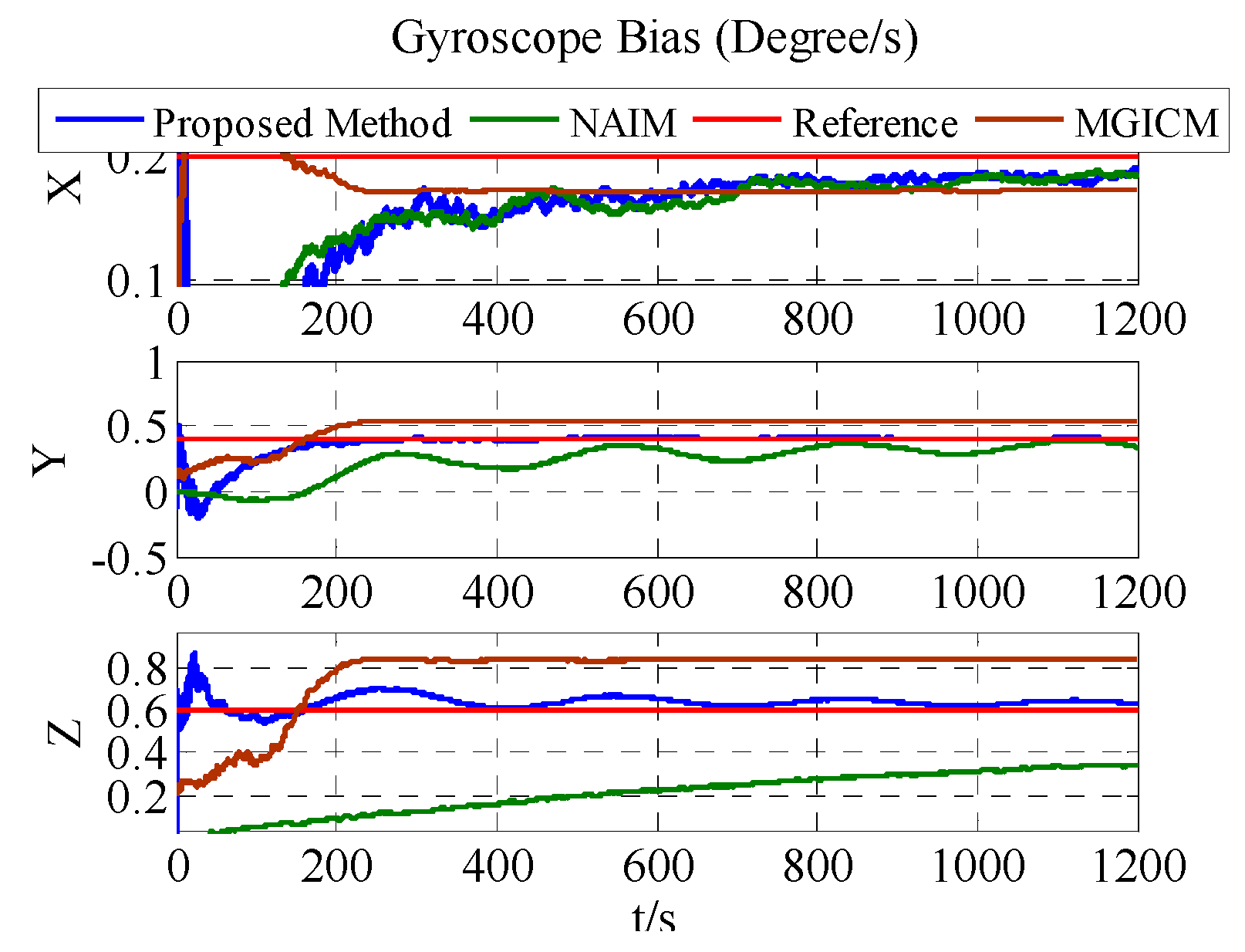
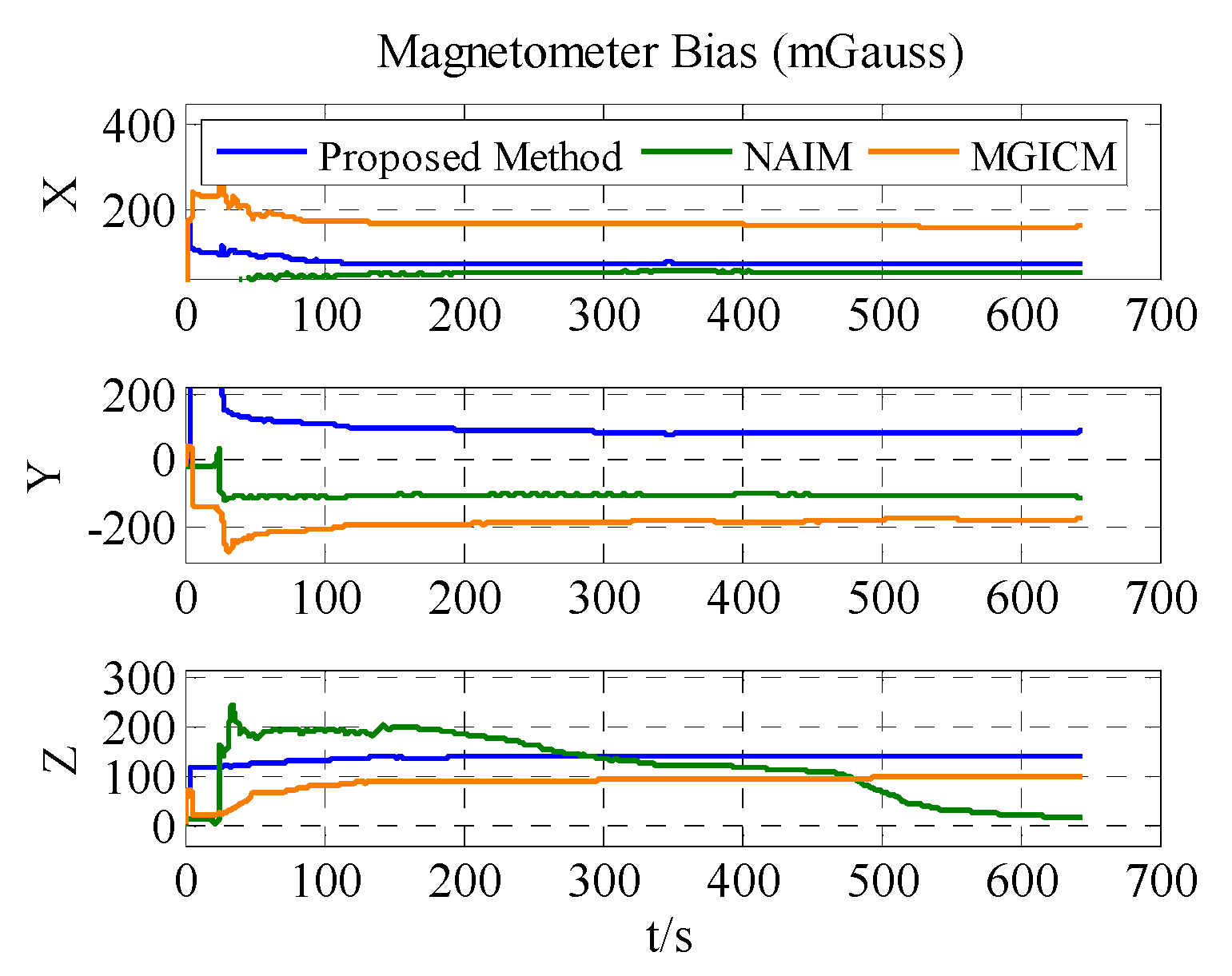
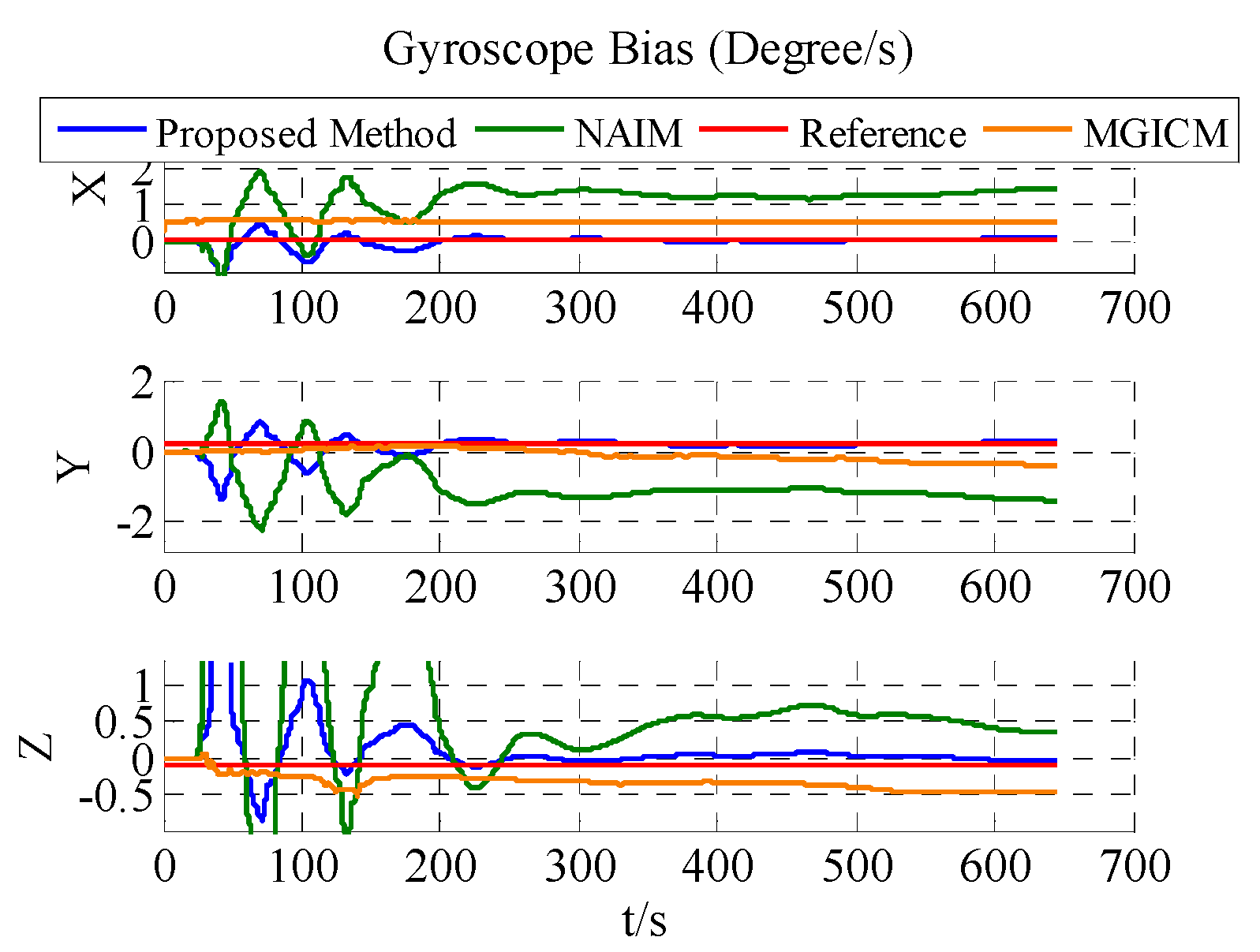
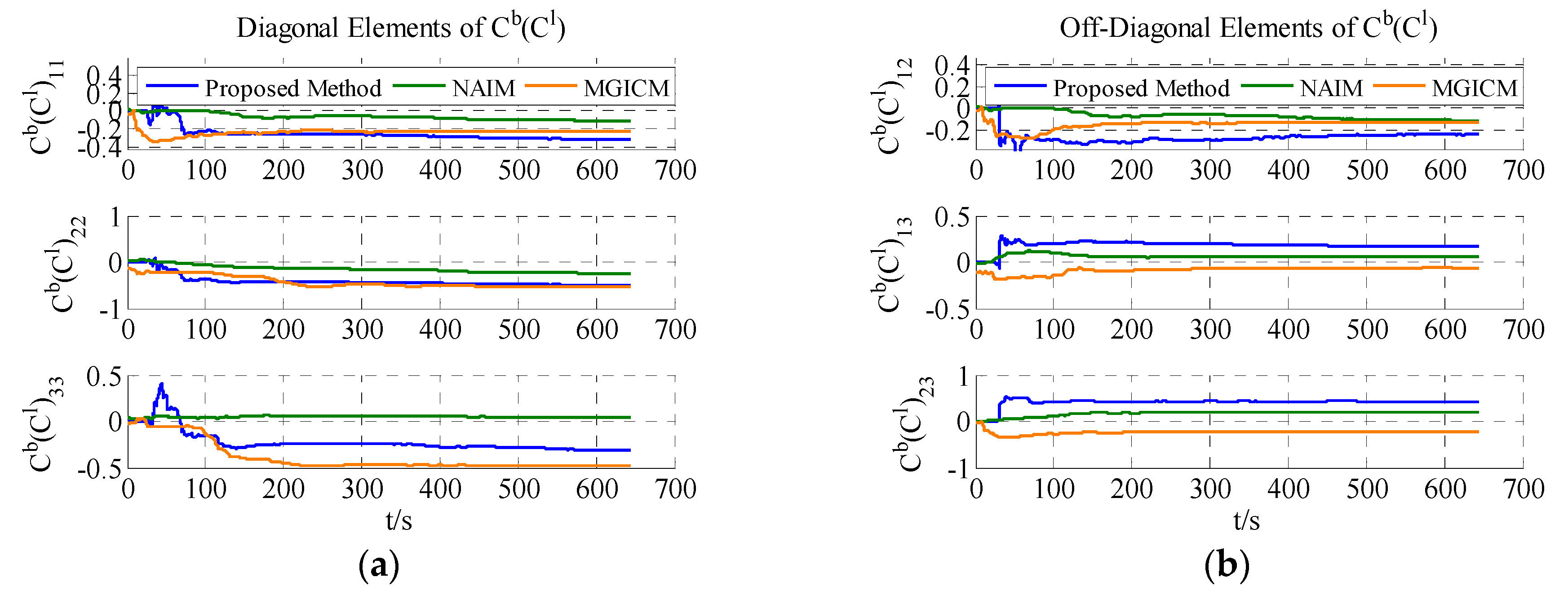
4.2. Test Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fang, J.; Liu, Z. In-flight alignment of POS based on state-transition matrix. IEEE Sens. J. 2015, 15, 3258–3264. [Google Scholar] [CrossRef]
- Jiancheng, F.; Sheng, Y. Study on innovation adaptive EKF for in-flight alignment of airborne POS. IEEE Trans. Instrum. Meas. 2011, 60, 1378–1388. [Google Scholar] [CrossRef]
- Zihajehzadeh, S.; Loh, D.; Lee, T.J.; Hoskinson, R.; Park, E.J. A cascaded Kalman filter-based GPS/MEMS-IMU integration for sports applications. Measurement 2015, 73, 200–210. [Google Scholar] [CrossRef]
- Fang, J.; Sun, H.; Cao, J.; Zhang, X.; Tao, Y. A novel calibration method of magnetic compass based on ellipsoid fitting. IEEE Trans. Instrum. Meas. 2011, 60, 2053–2061. [Google Scholar] [CrossRef]
- Olivares, A.; Ruiz-Garcia, G.; Olivares, G.; Górriz, J.M.; Ramirez, J. Automatic determination of validity of input data used in ellipsoid fitting MARG calibration algorithms. Sensors 2013, 13, 11797–11817. [Google Scholar] [CrossRef]
- Wahdan, A.; Georgy, J.; Noureldin, A. Three-dimensional magnetometer calibration with small space coverage for pedestrians. IEEE Sens. J. 2015, 15, 598–609. [Google Scholar] [CrossRef]
- Gebre-Egziabher, D.; Elkaim, G.H.; David Powell, J.; Bradford, W.P. Calibration of strapdown magnetometers in magnetic field domain. J. Aerosp. Eng. 2006, 19, 87–102. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Lai, K.L.; Harman, R.R. Real-time attitude-independent three-axis magnetometer calibration. J. Guid. Control Dyn. 2005, 28, 115–120. [Google Scholar] [CrossRef]
- Lai, K.-L.; Crassidis, J.; Harman, R. Real-Time Attitude-Independent Gyro Calibration from Three-Axis Magnetometer Measurements. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Providence, RI, USA, 16–19 August 2004; pp. 1–11. [Google Scholar] [CrossRef]
- Huang, L.; Jing, W. Attitude-independent geomagnetic navigation using onboard complete three-axis magnetometer calibration. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–7. [Google Scholar] [CrossRef]
- Springmann, J.C.; Cutler, J.W. Attitude-Independent Magnetometer Calibration with Time-Varying Bias. J. Guid. Control Dyn. 2012, 35, 1080–1088. [Google Scholar] [CrossRef]
- Grandvallet, B.; Zemouche, A.; Boutayeb, M.; Changey, S. Real-Time Attitude-Independent Three-Axis Magnetometer Calibration for Spinning Projectiles: A Sliding Window Approach. IEEE Trans. Control Syst. Technol. 2014, 22, 255–264. [Google Scholar] [CrossRef]
- Draganová, K.; Laššák, M.; Praslička, D.; Kán, V. Attitude-independent 3-axis accelerometer calibration based on adaptive neural network. Procedia Eng. 2014, 87, 1255–1258. [Google Scholar] [CrossRef]
- Abd Rabbou, M.; El-Rabbany, A. Integration of GPS precise point positioning and MEMS-based INS using unscented particle filter. Sensors 2015, 15, 7228–7245. [Google Scholar] [CrossRef]
- Drovandi, C.C.; McGree, J.M.; Pettitt, A.N. A sequential Monte Carlo algorithm to incorporate model uncertainty in Bayesian sequential design. J. Comput. Graph. Stat. 2014, 23, 3–24. [Google Scholar] [CrossRef]
- Urteaga, I.; Bugallo, M.F.; Djuric, P.M. Sequential Monte Carlo methods under model uncertainty. In Proceedings of the 2016 IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef]
- Wu, Z.; Wu, Y.; Hu, X.; Wu, M. Calibration of three-axis strapdown magnetometers using Particle Swarm Optimization algorithm. In Proceedings of the ROSE 2011—IEEE International Symposium on Robotic and Sensors Environments, Montreal, QC, Canada, 17–18 September 2011; pp. 160–165. [Google Scholar] [CrossRef]
- Wu, Z.; Wu, Y.; Hu, X.; Wu, M. Calibration of three-axis magnetometer using stretching particle swarm optimization algorithm. IEEE Trans. Instrum. Meas. 2013, 62, 281–292. [Google Scholar] [CrossRef]
- Riwanto, B.A.; Tikka, T.; Kestila, A.; Praks, J. Particle Swarm Optimization with Rotation Axis Fitting for Magnetometer Calibration. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1009–1122. [Google Scholar] [CrossRef]
- Wu, Y.; Zou, D.; Liu, P.; Yu, W. Dynamic Magnetometer Calibration and Alignment to Inertial Sensors by Kalman Filtering. IEEE Trans. Control Syst. Technol. 2017, 26, 716–723. [Google Scholar] [CrossRef]
- Wu, Y.; Pei, L. Gyroscope Calibration via Magnetometer. IEEE Sens. J. 2017, 17, 5269–5275. [Google Scholar] [CrossRef]
- Prikhodko, I.P.; Gregory, J.A.; Judy, M.W. Virtually rotated MEMS gyroscope with angle output. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 323–326. [Google Scholar] [CrossRef]
- Prikhodko, I.P.; Gregory, J.A.; Bugrov, D.I.; Judy, M.W. Overcoming limitations of Rate Integrating Gyroscopes by virtual rotation. In Proceedings of the IEEE 3rd International Symposium on Inertial Sensors and Systems (ISS 2016), Laguna Beach, CA, USA, 22–25 February 2016; pp. 5–8. [Google Scholar] [CrossRef]
- Norouzpour-shirazi, A.; Ayazi, F. A Dual-Mode Actuation and Sensing Scheme for In-Run Calibration of Bias and Scale Factor Errors in Axisymmetric Resonant Gyroscopes. IEEE Sens. J. 2018, 18, 1993–2005. [Google Scholar]
- Ousaloo, H.S.; Sharifi, G.; Mahdian, J.; Nodeh, M.T. Complete Calibration of Three-Axis Strapdown Magnetometer in Mounting Frame. IEEE Sens. J. 2017, 17, 7886–7893. [Google Scholar] [CrossRef]
- Finlay, C.C.; Maus, S.; Beggan, C.D.; Bondar, T.N.; Chambodut, A.; Chernova, T.A.; Zvereva, T.I. International Geomagnetic Reference Field: The eleventh generation. Geophys. J. Int. 2010, 183, 1216–1230. [Google Scholar] [CrossRef]
- Haykin, S.; Arasaratnam, I. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Zhao, Y. Performance Evaluation of Cubature Kalman filter in a GPS/IMU tightly-coupled navigation system. Signal Process. 2016, 119, 67–79. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Inputs | Advantages | Disadvantages |
|---|---|---|---|
| Ellipsoid fitting [4,5] | Magnetic field | Simple, Short run time, Less calculation | Low precision, Bad adaptability, Off-line, Rotation in all possible orientations |
| Attitude-dependent [6,7] | Magnetic field, Heading | Data in small space coverage, Model precision, Short run time | Calibration precision, Relies on heading |
| Attitude-independent [8,9,10,11,12,13] | Magnetic field | Model precision, On-line, Good adaptability | Hard to set initial filter parameter, Rotation in all possible orientations |
| Particle swarm optimization algorithm [18,19,20] | Magnetic field | Need not set initial parameters, Model precision | High calculation cost, Rotation in all possible orientations, Off-line |
| Gyroscope integrated calibration [21,22] | Magnetic field, Angular rates | Model precision, On-line | Rotation in all possible orientations |
| Virtual rotation scheme [23,24,25] | Angular rates | Model precision, Does not require initial situation | High calculation cost, Has not been used to calibrate magnetometer |
| Proposed method | Magnetic field, Angular rates, Level attitude | On-line, Only needs level rotation | Relatively obscure model, Relies on level attitude |
| Items | Values |
|---|---|
| Device rotation angular rate on z-axis | Less than 20 (degree/s) in sine wave with 300 s periods |
| Device rotation angular rate on x and y-axis | Less than 3 (degree/s) in sine wave with 3 s periods |
| Update frequency | 200 (Hz) |
| [−30,60,90]T (mGauss) | |
| (Proposed method) (Attitude-independent method) | |
| [0.2,0.3,0.4]T (degree/s) | |
| 0.2 (degree/s)(rms) | |
| 0.45 (mGauss) (rms) |
| Method | |||
|---|---|---|---|
| Reference | (mGauss) | (degree/s) | |
| NAIM | (mGauss) | (degree/s) | |
| MGICM | (mGauss) | (degree/s) | |
| Proposed method | (mGauss) | (degree/s) |
| Items | ADIS16488 |
|---|---|
| Sampling rates | 205 (Hz) |
| Gyroscope bias repeatability | ±0.2 (degree/s) |
| Gyroscope in-run bias stability | 6.25 (degree/h) |
| Gyroscope angular random walk | 0.3 (degree/√h) |
| Gyroscope output noise | 0.16 (degree/s)(rms) |
| Accelerometer bias repeatability | ±16 (mg) |
| Accelerometer in-run bias stability | 0.1 mg |
| Accelerometer velocity random walk | 0.029 m/s/√h |
| Accelerometer output noise | 1.5 (mg)(rms) |
| Magnetometer output noise | 0.45 (mGauss)(rms) |
| Method | |||
|---|---|---|---|
| Reference | - | - | (degree/s) |
| NAIM | (mGauss) | (degree/s) | |
| MGICM | (mGauss) | (degree/s) | |
| Proposed method | (mGauss) | (degree/s) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Wang, W. Magnetometer and Gyroscope Calibration Method with Level Rotation. Sensors 2018, 18, 748. https://doi.org/10.3390/s18030748
Wu Z, Wang W. Magnetometer and Gyroscope Calibration Method with Level Rotation. Sensors. 2018; 18(3):748. https://doi.org/10.3390/s18030748
Chicago/Turabian StyleWu, Zongkai, and Wei Wang. 2018. "Magnetometer and Gyroscope Calibration Method with Level Rotation" Sensors 18, no. 3: 748. https://doi.org/10.3390/s18030748
APA StyleWu, Z., & Wang, W. (2018). Magnetometer and Gyroscope Calibration Method with Level Rotation. Sensors, 18(3), 748. https://doi.org/10.3390/s18030748