Energy Level-Based Abnormal Crowd Behavior Detection



Abstract
:1. Introduction
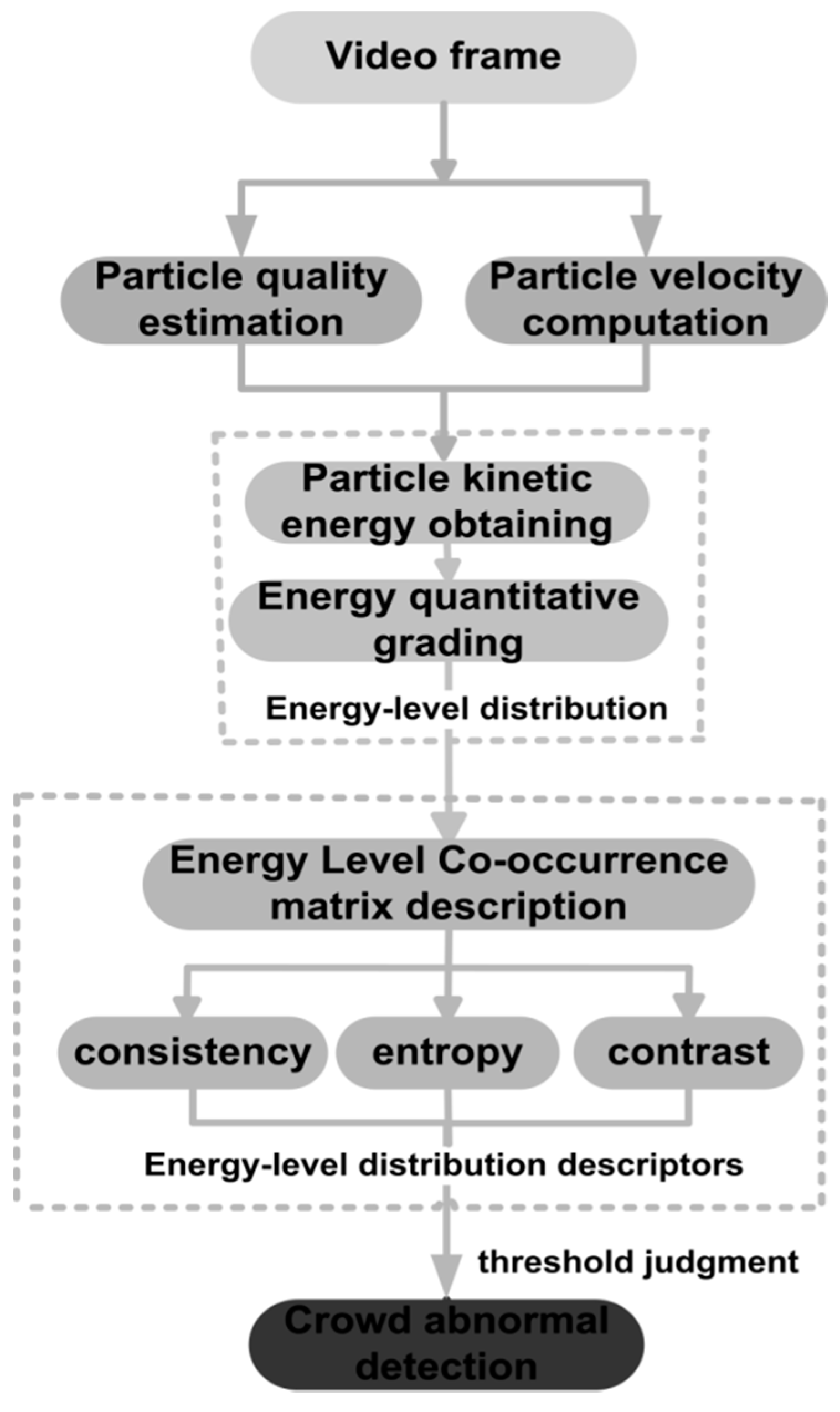
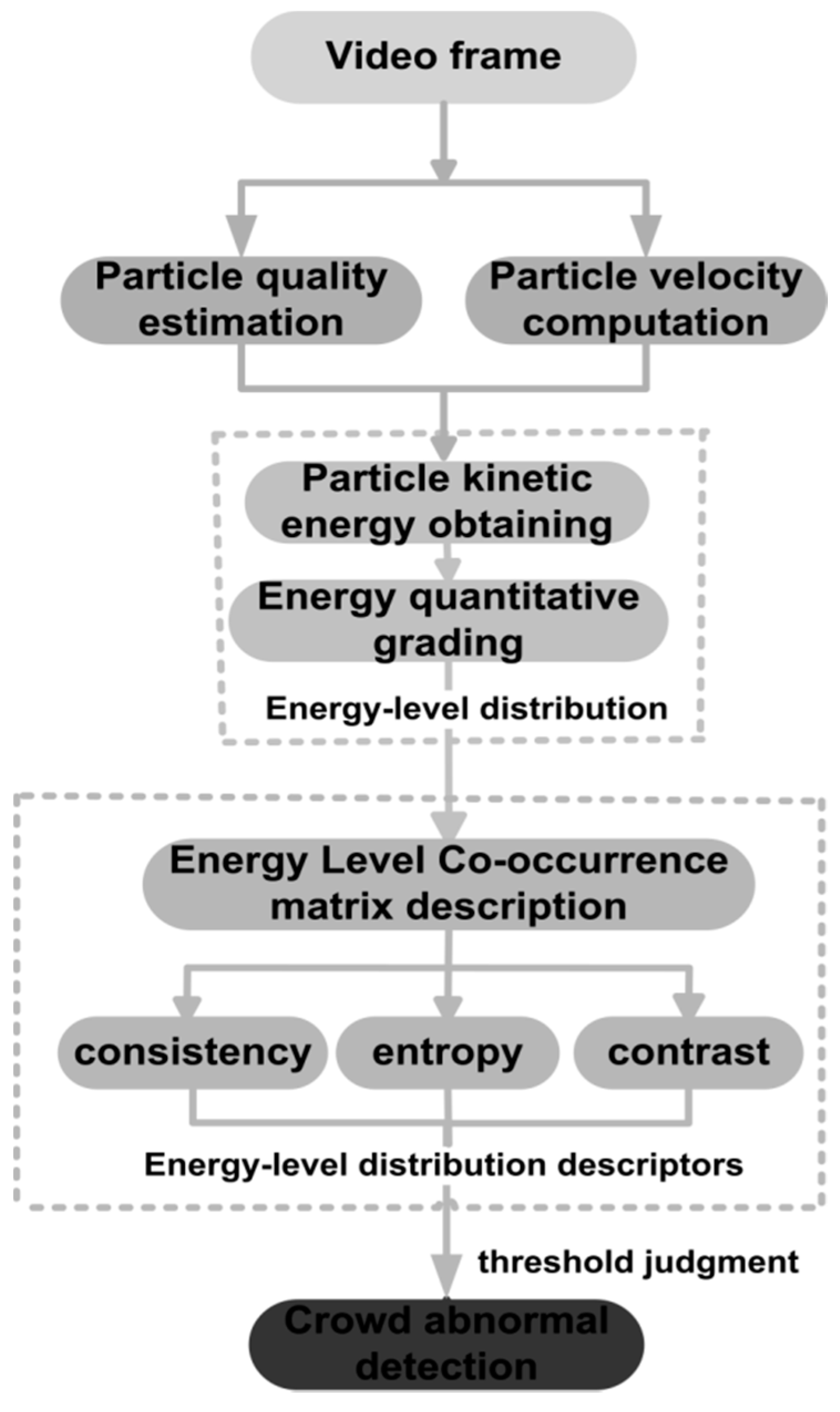
2. Overview of the Method
3. Kinetic Energy Model
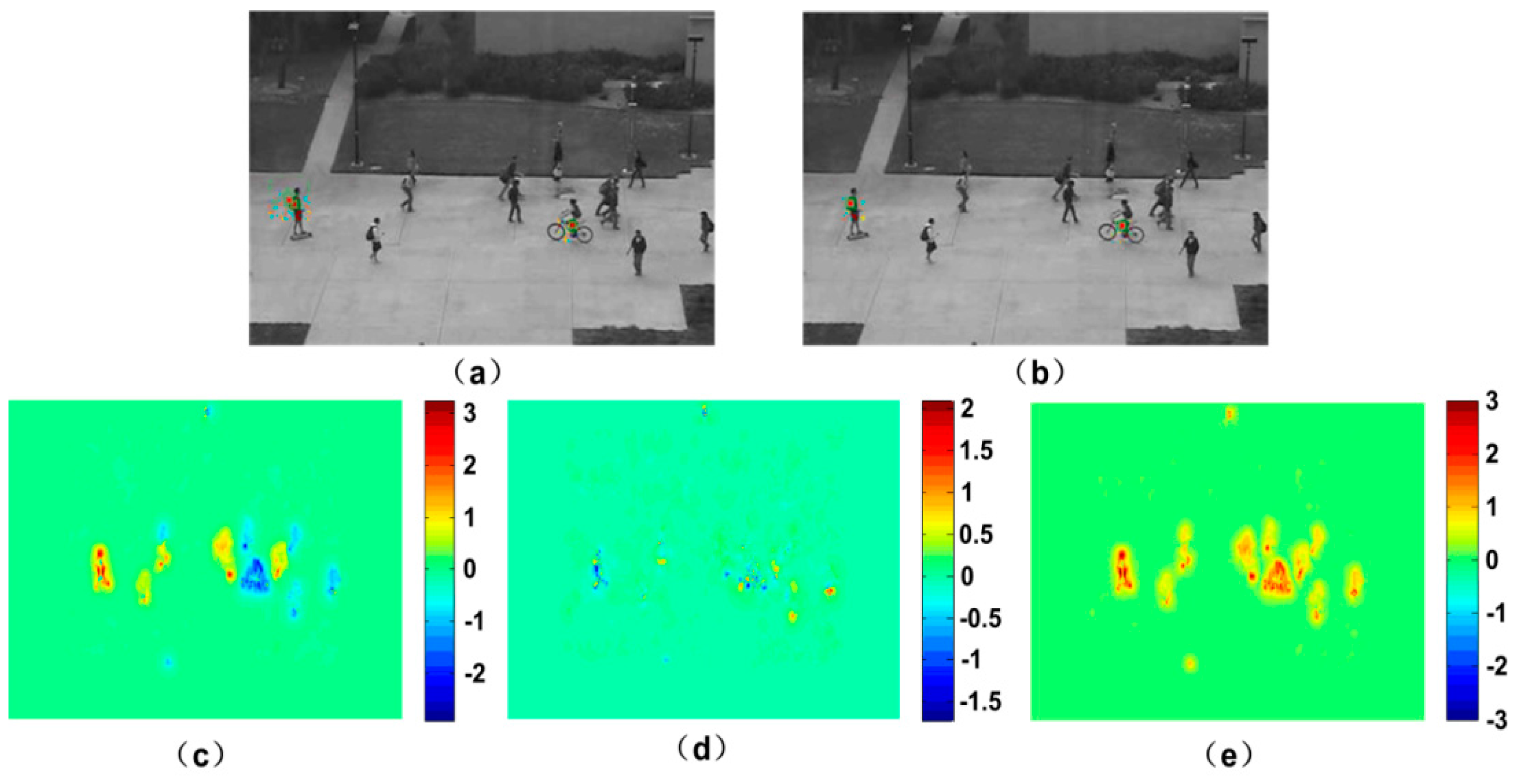
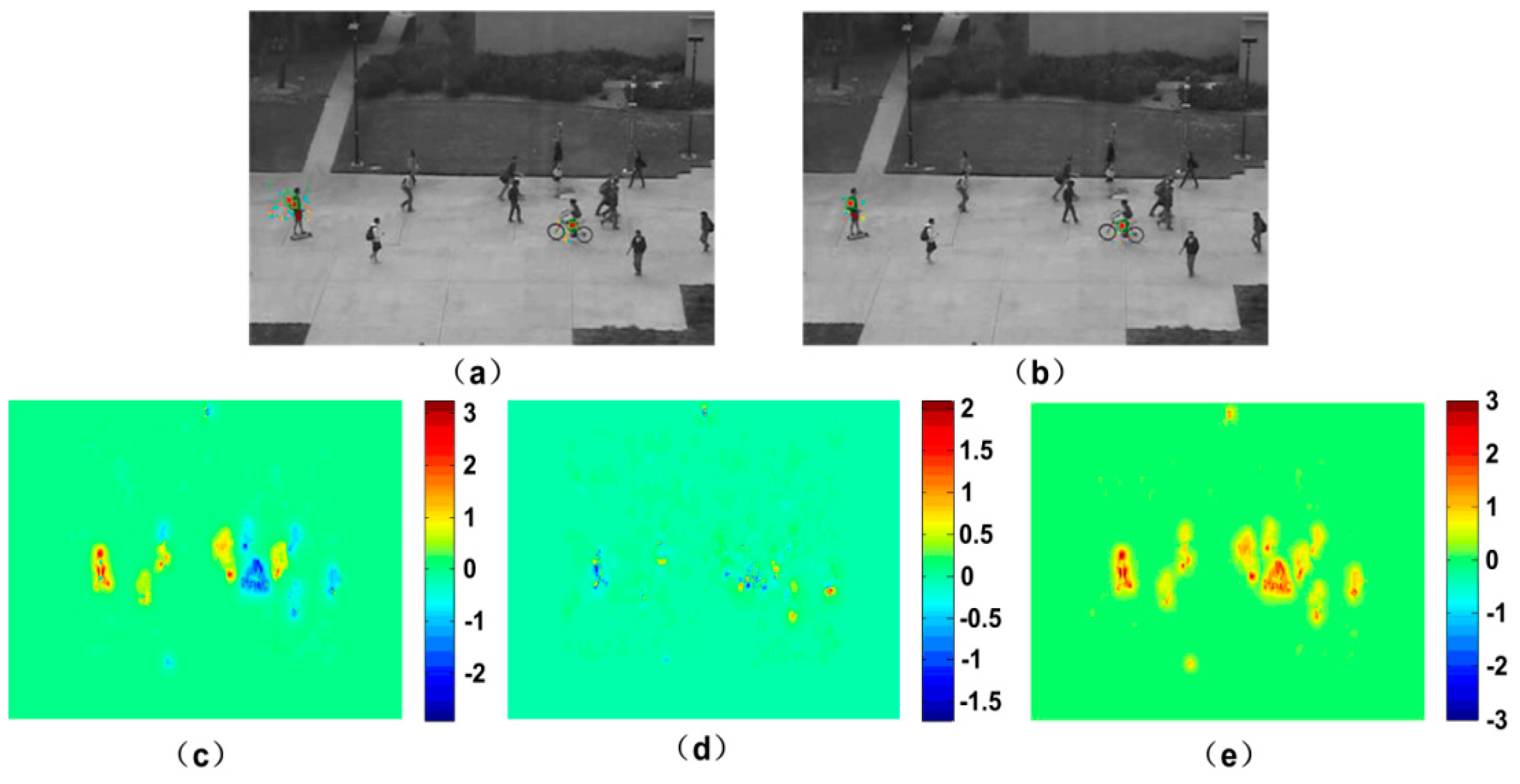
3.1. Particle Velocity Computation
3.2. Particle Quality Estimation
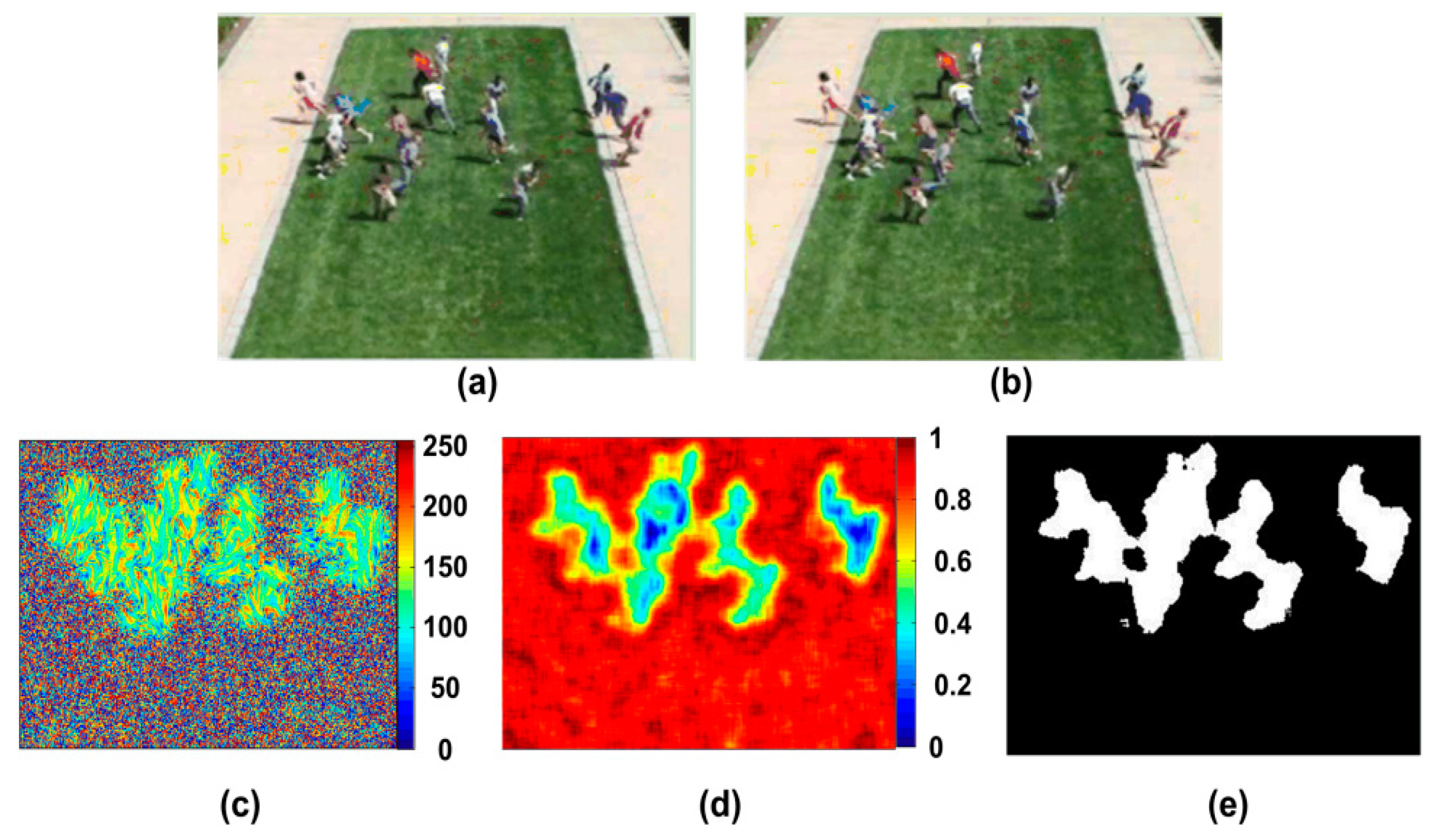
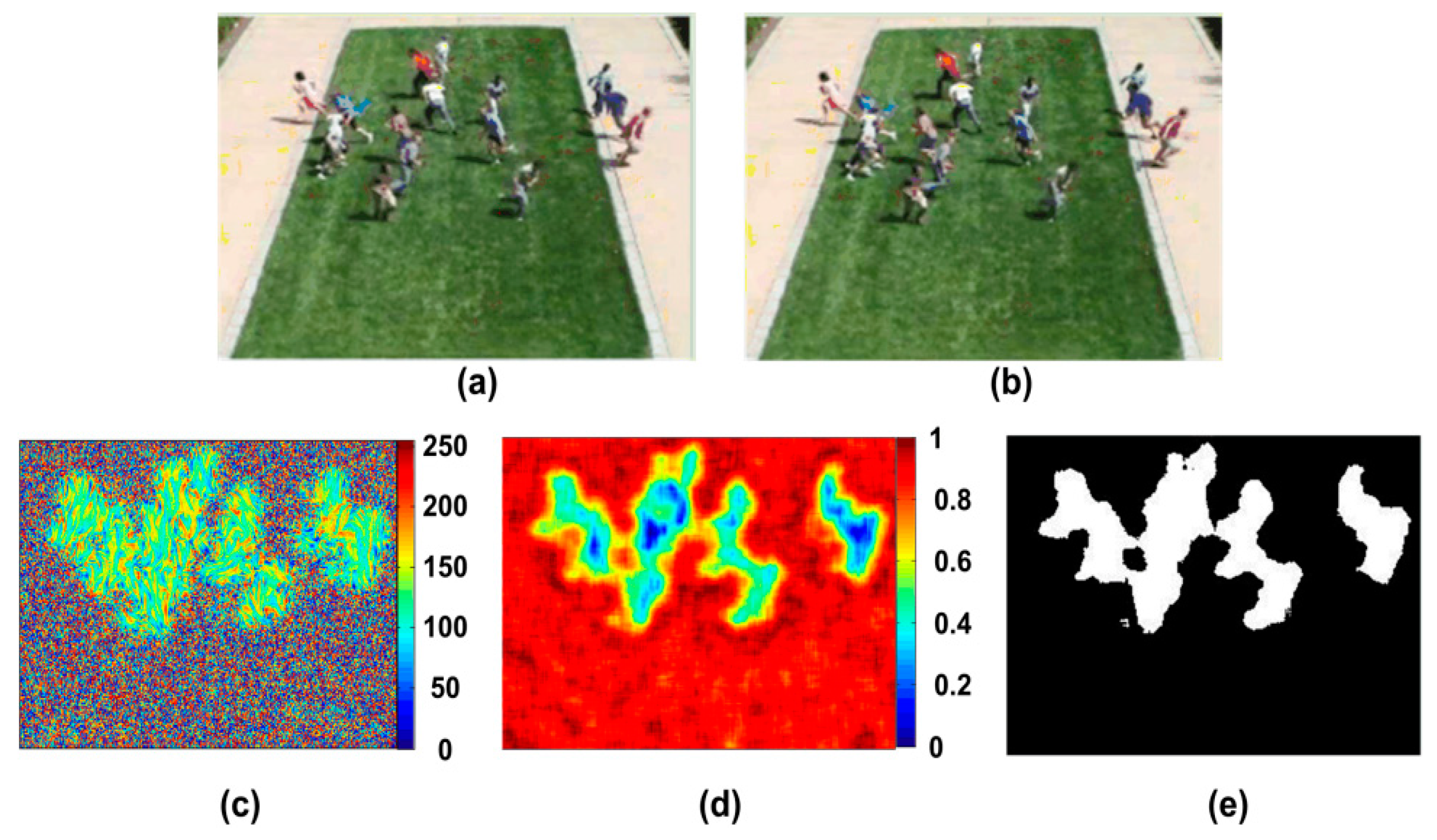
3.2.1. Foreground Extraction
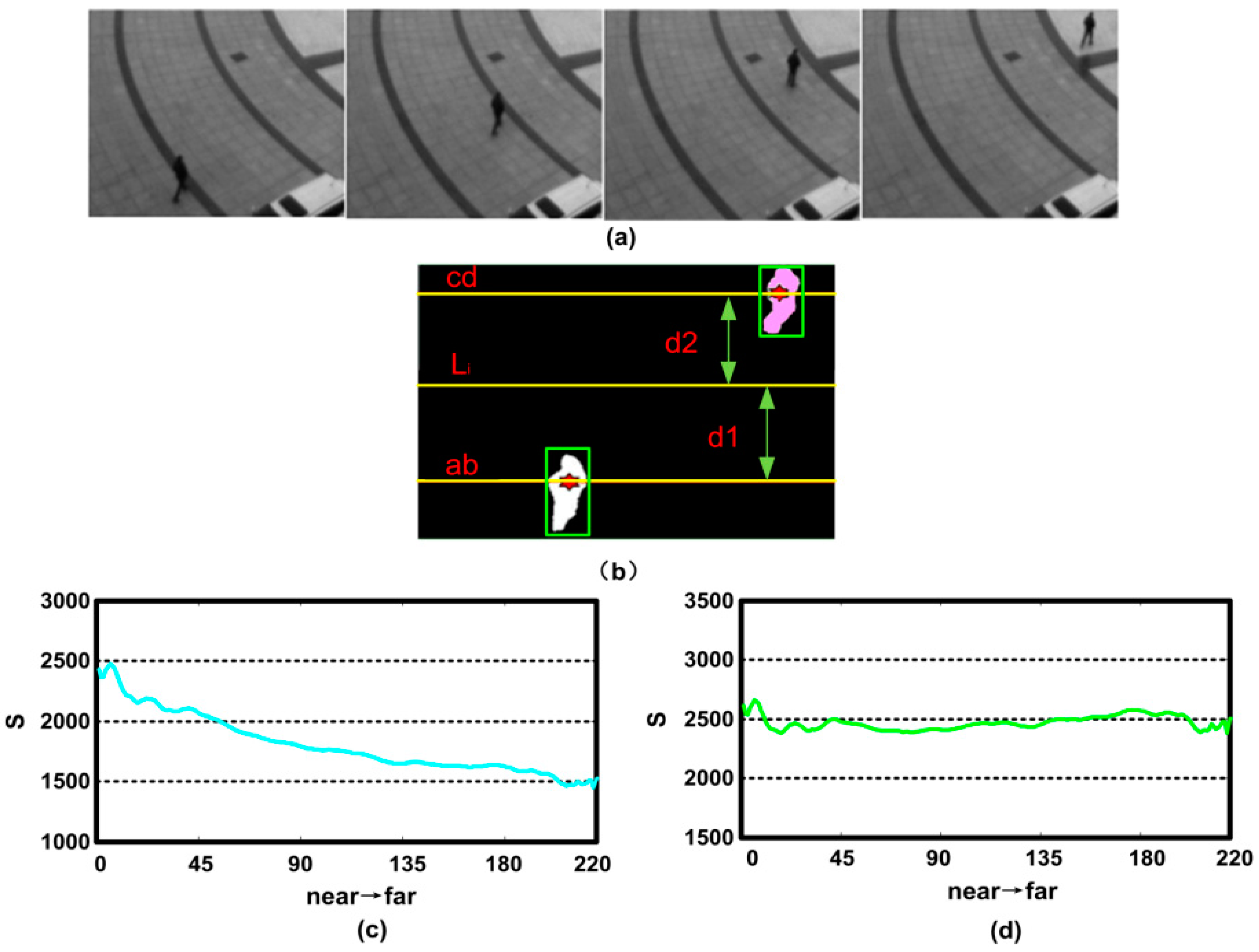
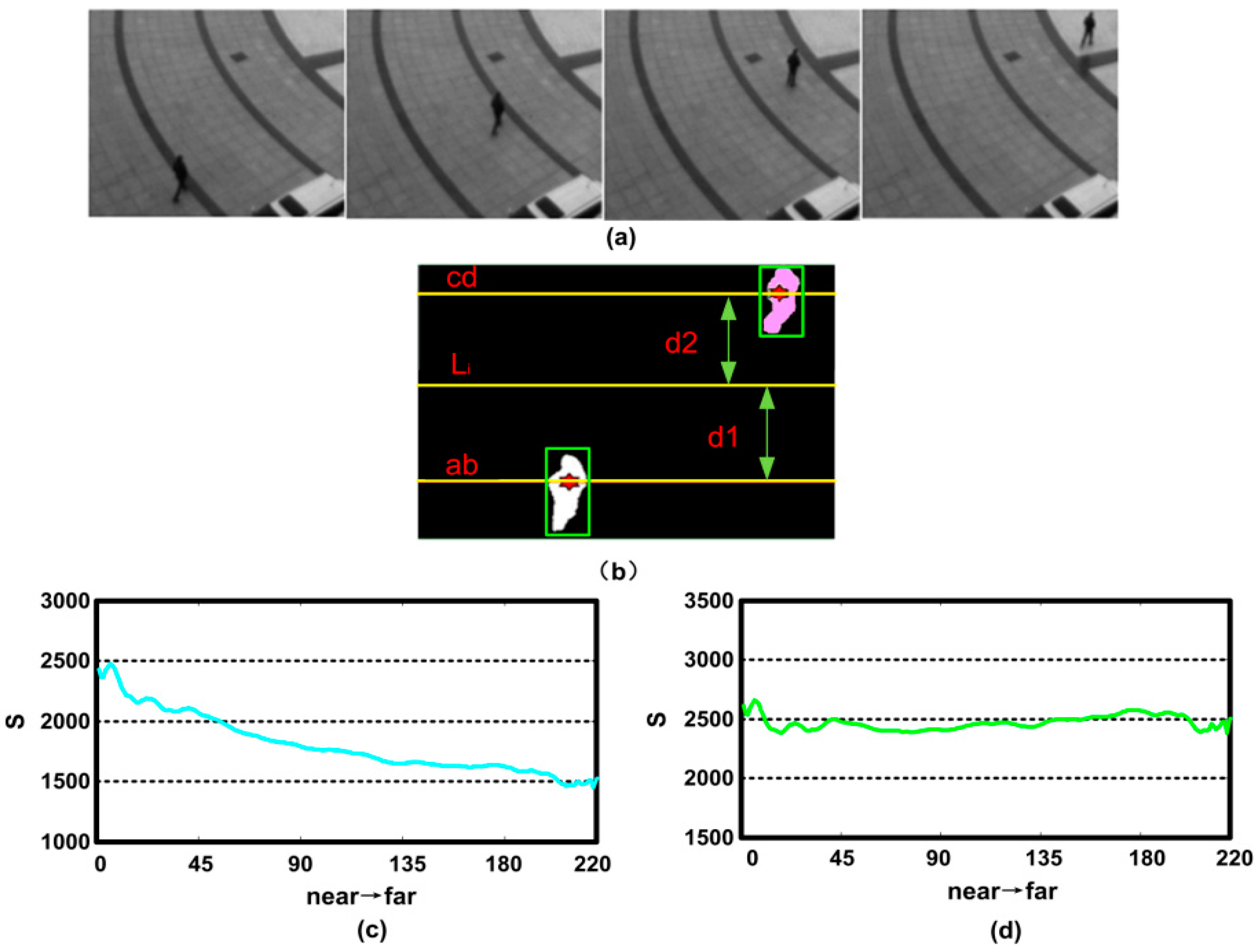
3.2.2. Quality Estimation
3.3. Particle Kinetic Energy Model
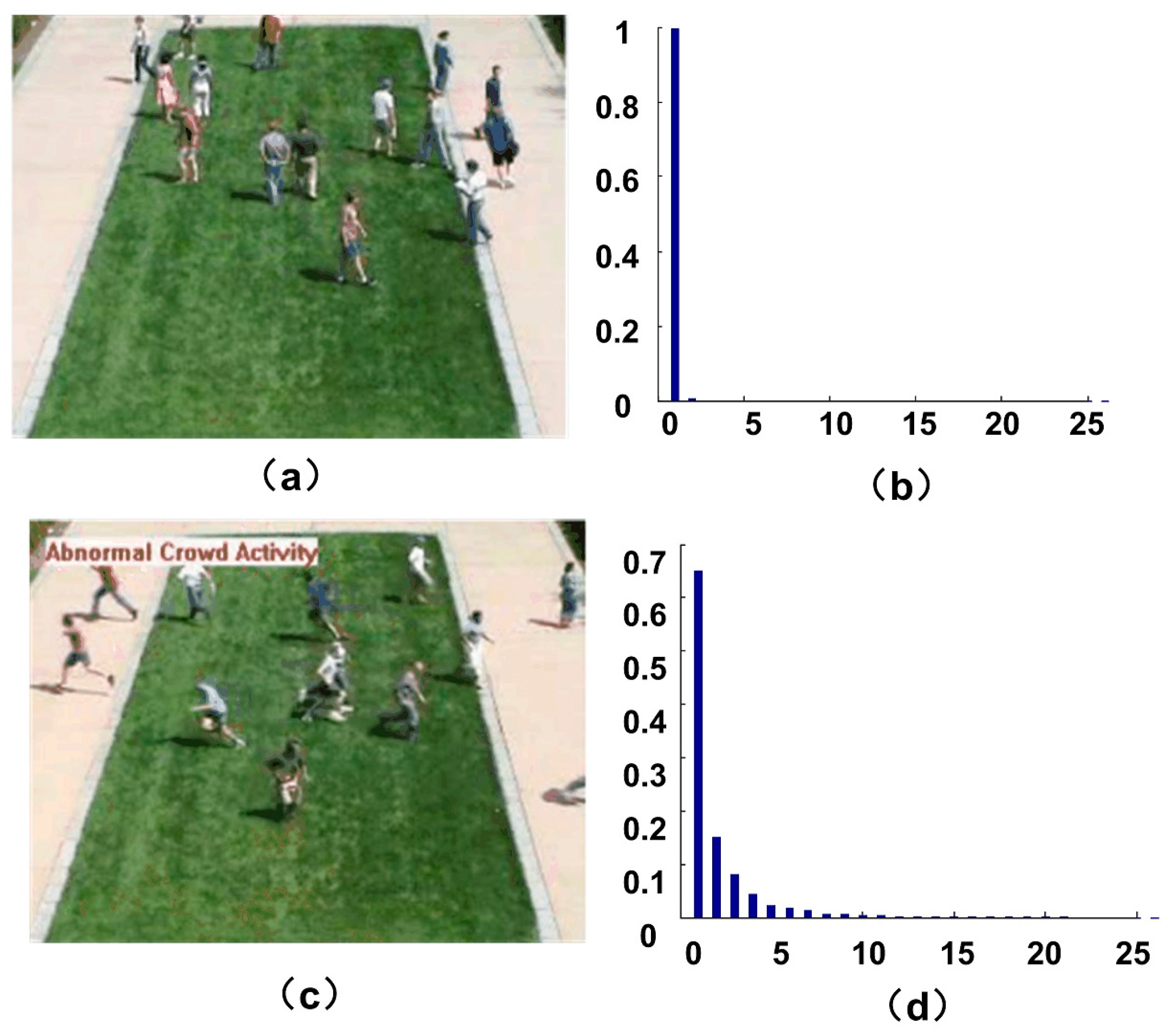
4. Energy-Level Distribution of Crowd
4.1. Energy Grading of Particles
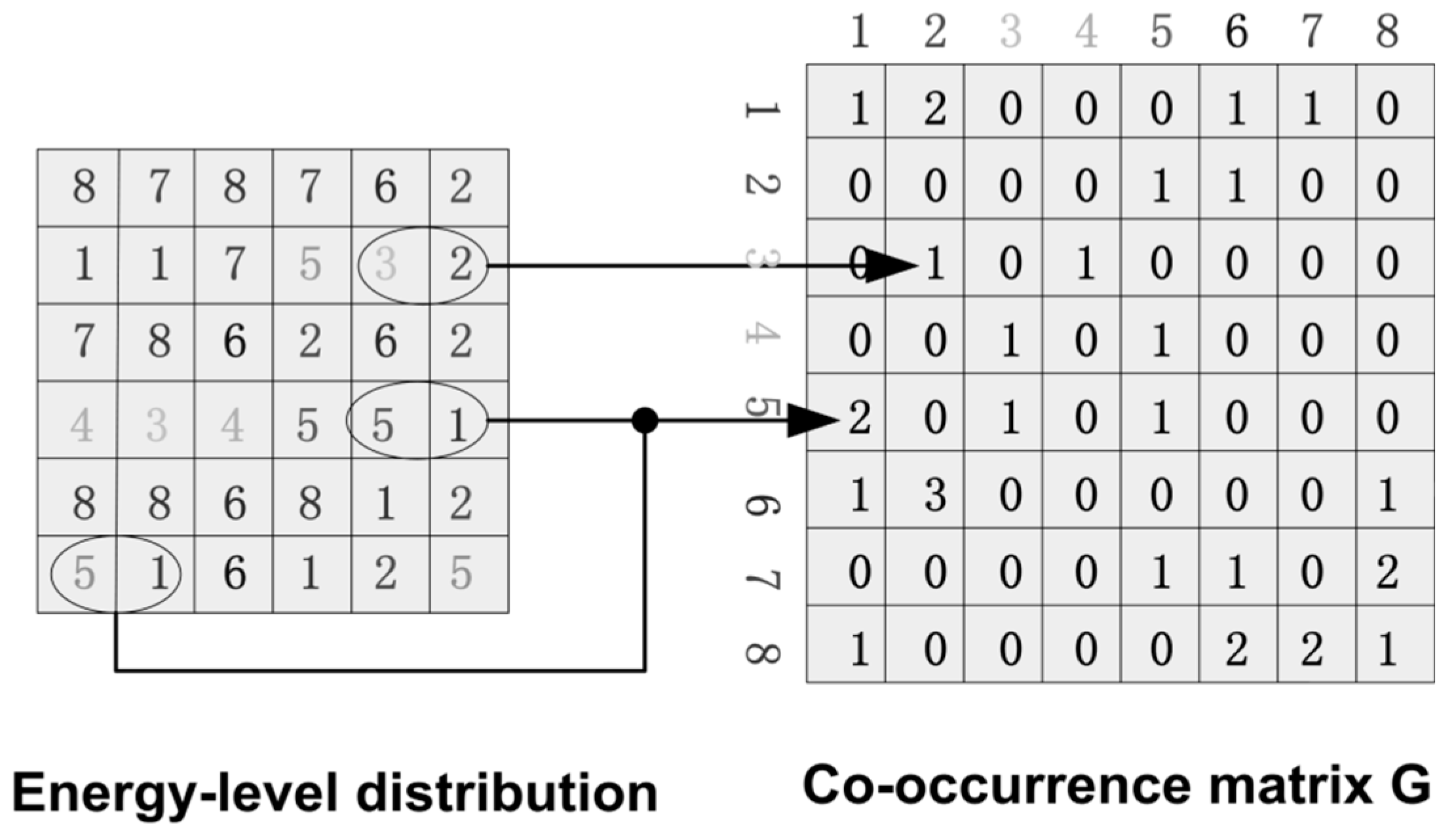
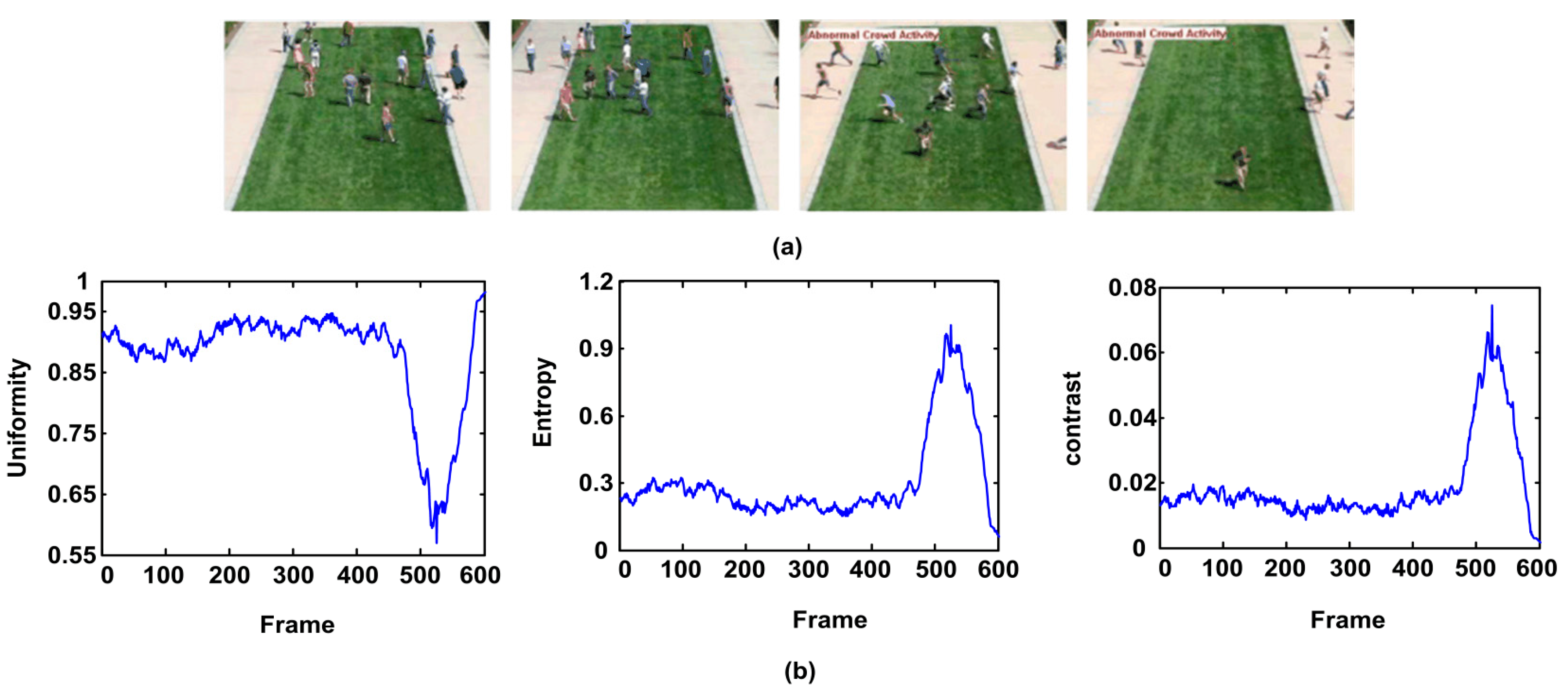
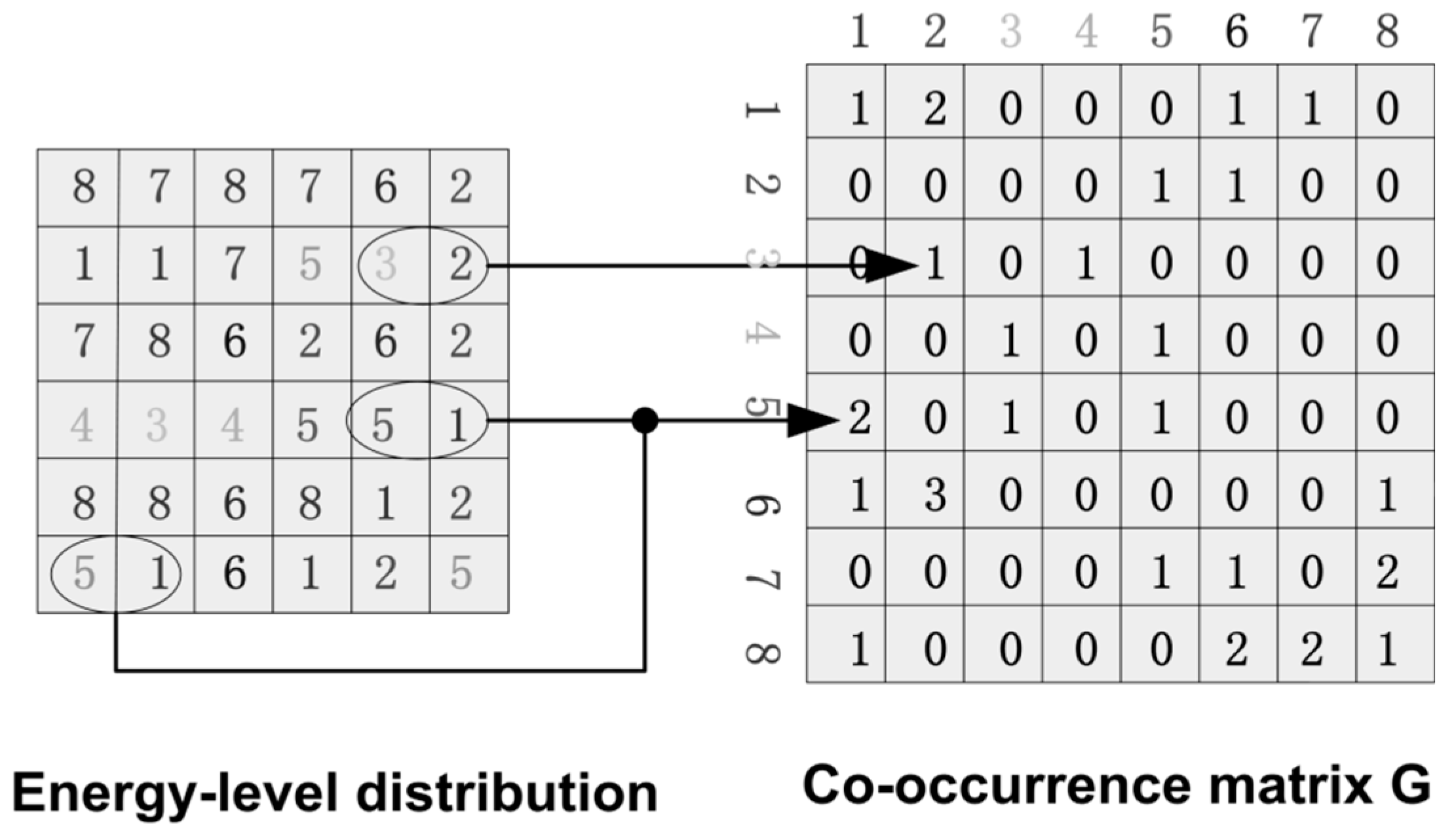
4.2. The Description of Energy-Level Co-Occurrence Matrix
5. Experiment and Discussion
5.1. Threshold Estimation
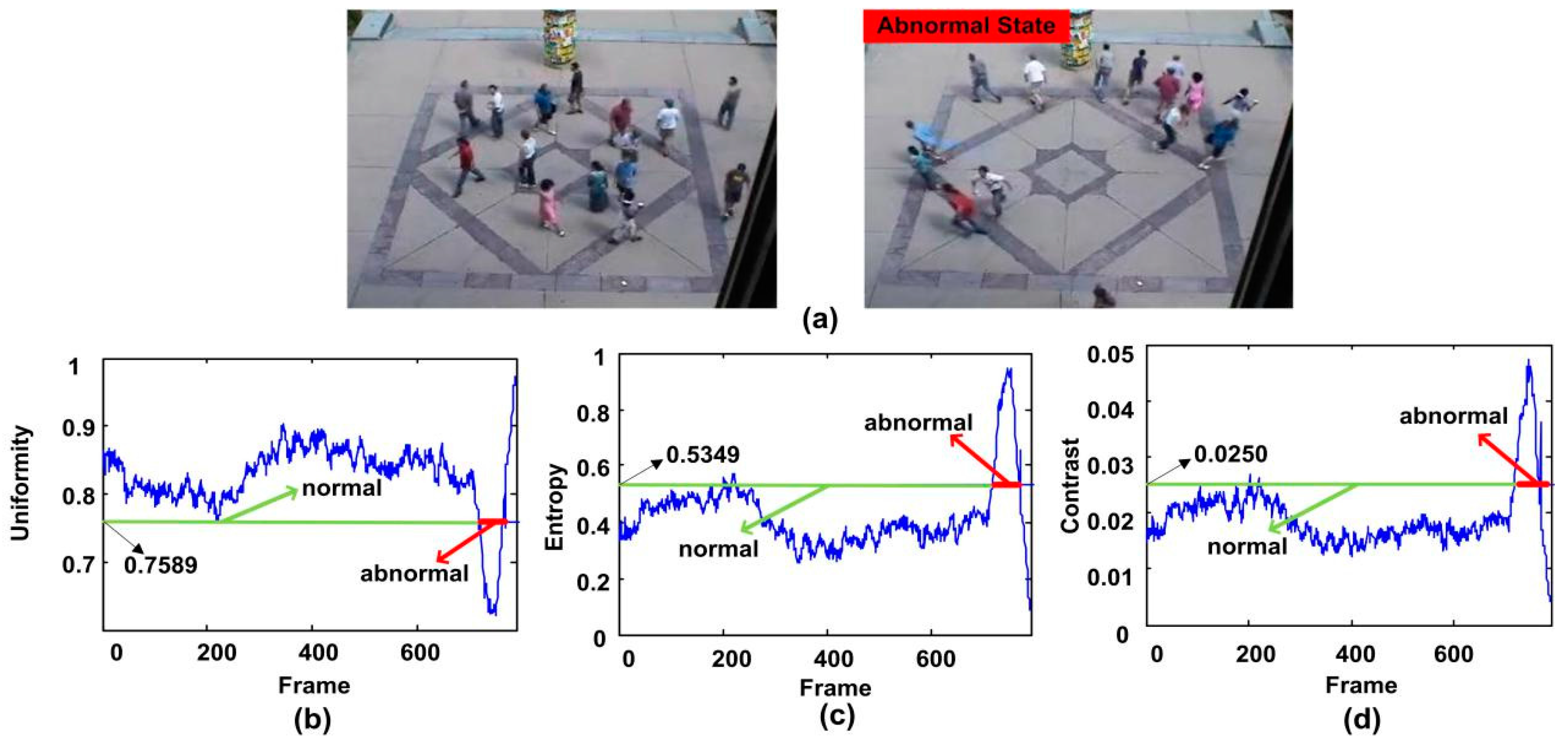
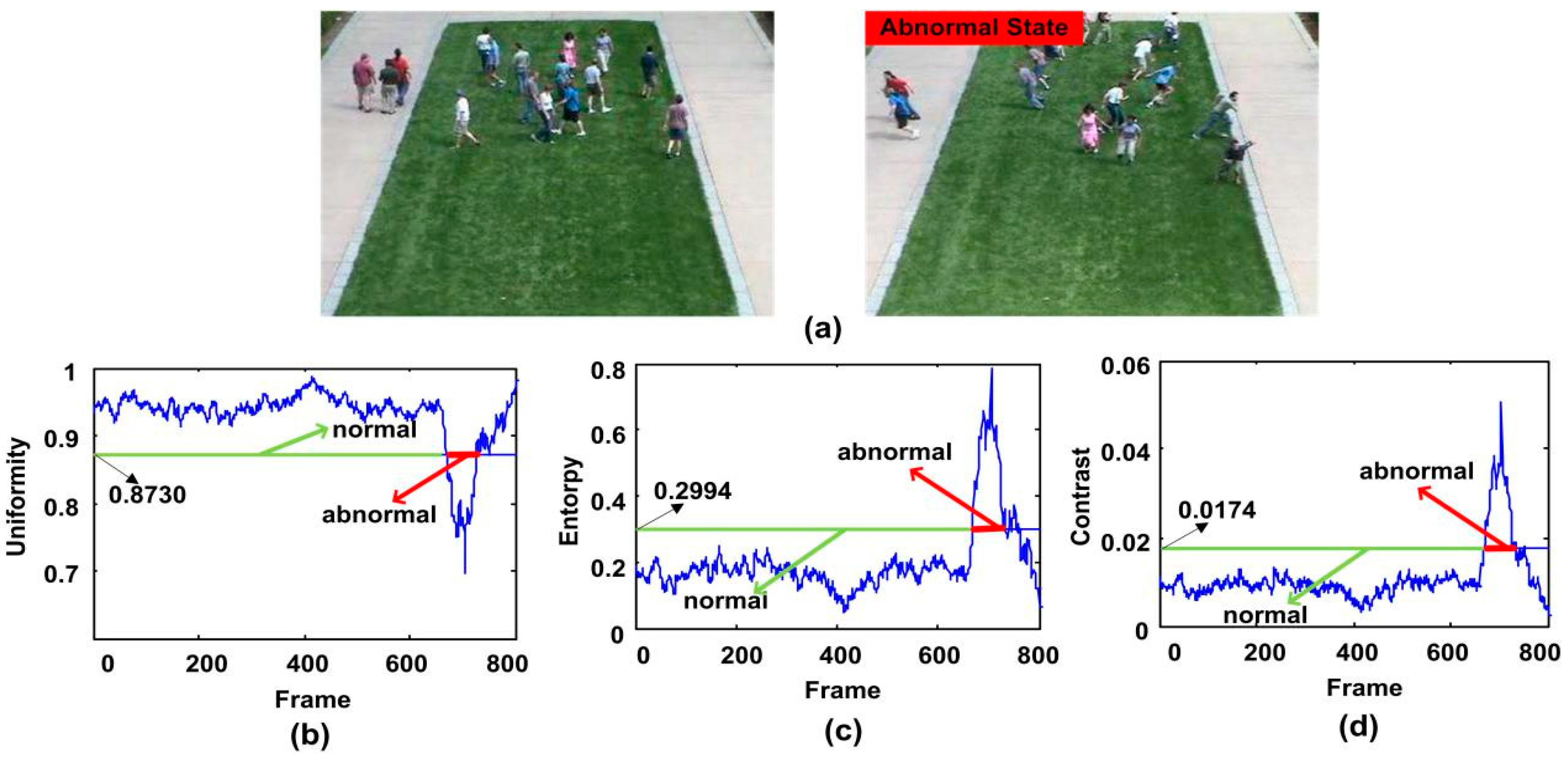
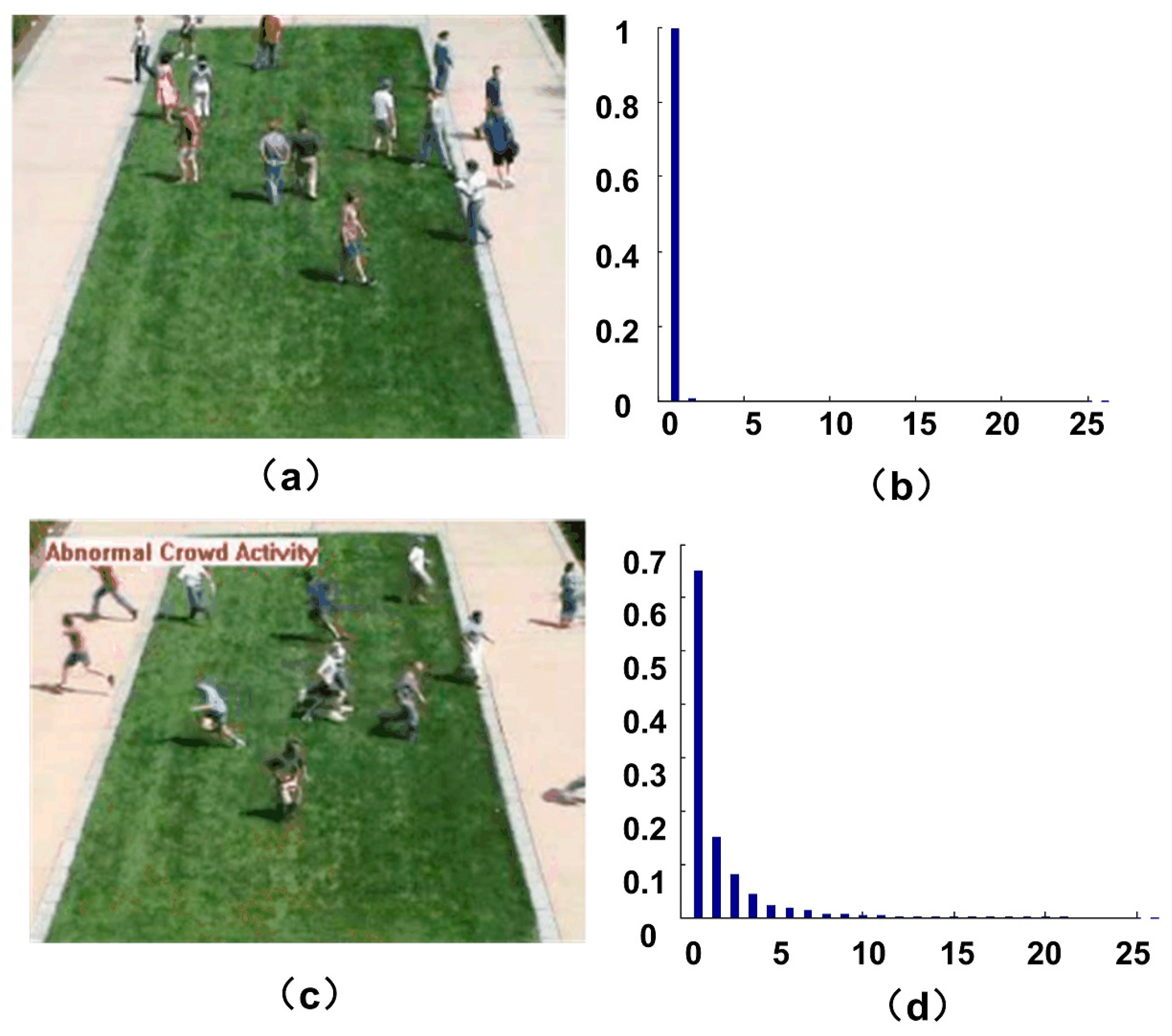
5.2. The Results of Abnormal Crowd Behavior Detection Using Different Features
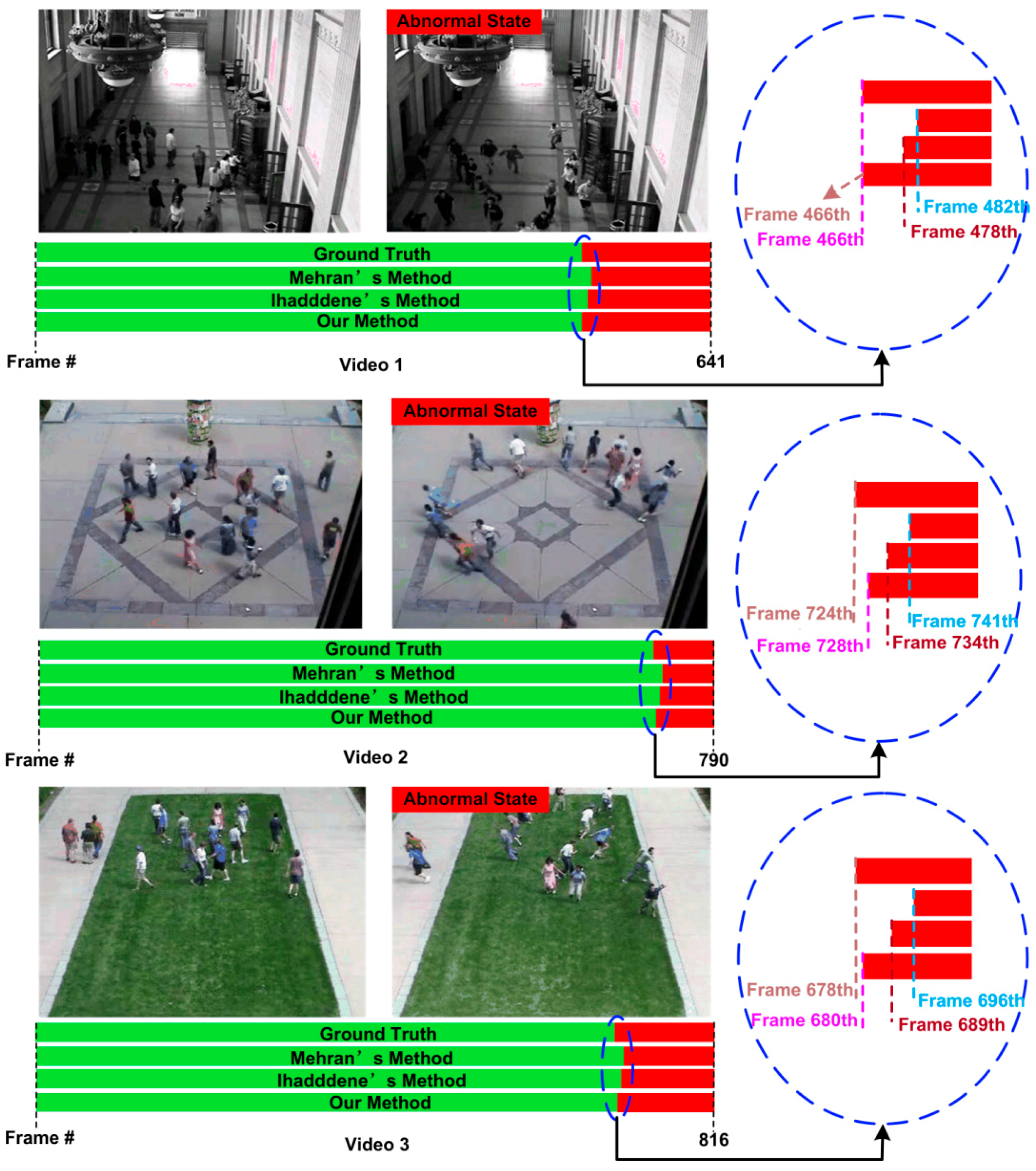
5.3. Integrating the Proposed Three Features
5.4. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wu, X.; Qu, Y.; Qian, H.; Xu, Y. A detection system for human abnormal behavior. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 1204–1208. [Google Scholar]
- Mahadevan, V.; Li, W.; Bhalodia, V.; Vasconcelos, N. Anomaly detection in crowded scenes. In Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; Volume 249, p. 250. [Google Scholar]
- Liao, Z.; Yang, S.; Liang, J. Detection of abnormal crowd distribution. In Proceedings of the 2010 IEEE/ACM Int’l Conference on Green Computing and Communications & Int’l Conference on Cyber, Physical and Social Computing, Hangzhou, China, 18–20 December 2010; pp. 600–604. [Google Scholar]
- Viola, P.; Jones, M.J.; Snow, D. Detecting Pedestrians Using Patterns of Motion and Appearance. In Proceedings of the International Conference on Compute Vision, Nice, France, 13–16 October 2003; Volume 63, pp. 153–161. [Google Scholar]
- Leibe, B.; Seemann, E.; Schiele, B. Pedestrian detection in crowded scenes. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 878–885. [Google Scholar]
- Saleemi, I.; Shah, M. Multiframe many–many point correspondence for vehicle tracking in high density wide area aerial videos. Int. J. Comput. Vis. 2013, 104, 198–219. [Google Scholar] [CrossRef]
- Zhao, T.; Nevatia, R.; Wu, B. Segmentation and tracking of multiple humans in crowded environments. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1198–1211. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhang, X.F.; Wang, Y.; Yu, H. Extended social force model-based mean shift for pedestrian tracking under obstacle avoidance. IET Comput. Vis. 2016, 11, 1–9. [Google Scholar] [CrossRef]
- Yu, H.; Sun, G.; Song, W.; Li, X. Human motion recognition based on neural network. In Proceedings of the 2005 International Conference on Communications, Circuits and Systems, Hong Kong, China, 27–30 May 2005; Volume 2. [Google Scholar]
- Bauer, D.; Seer, S.; Brändle, N. Macroscopic pedestrian flow simulation for designing crowd control measures in public transport after special events. In Proceedings of the 2007 Summer Computer Simulation Conference, San Diego, CA, USA, 16–19 July 2007; pp. 1035–1042. [Google Scholar]
- Cong, Y.; Yuan, J.; Liu, J. Sparse reconstruction cost for abnormal event detection. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 3449–3456. [Google Scholar]
- Kim, J.; Grauman, K. Observe locally, infer globally: A space-time MRF for detecting abnormal activities with incremental updates. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 2921–2928. [Google Scholar]
- Adam, A.; Rivlin, E.; Shimshoni, I.; Reinitz, D. Robust real-time unusual event detection using multiple fixed-location monitors. In IEEE Transactions on Pattern Analysis and Machine Intelligence; IEEE: Piscataway Township, NJ, USA, 2008; Volume 30, pp. 555–560. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Zhu, Q.; Yeh, M.C.; Cheng, K.T.; Avidan, S. Fast human detection using a cascade of histograms of oriented gradients. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 2, pp. 1491–1498. [Google Scholar]
- Chan, A.B.; Vasconcelos, N. Mixtures of dynamic textures. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV’05), Beijing, China, 17–21 October 2005; Volume 1. [Google Scholar]
- Xiong, G.; Wu, X.; Chen, Y.L.; Qu, Y. Abnormal crowd behavior detection based on the energy model. In Proceedings of the 2011 IEEE International Conference on Information and Automation (ICIA), Shenzhen, China, 6–8 June 2011; pp. 495–500. [Google Scholar]
- Mehran, R.; Oyama, A.; Shah, M. Abnormal crowd behavior detection using social force model. In Proceedings of the 2009 CVPR 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 935–942. [Google Scholar]
- Kratz, L.; Nishino, K. Anomaly detection in extremely crowded scenes using spatio-temporal motion pattern models. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2009), Miami, FL, USA, 20–25 June 2009; pp. 1446–1453. [Google Scholar]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef]
- Zhang, X.; He, H.; Cao, S.; Liu, H. Flow field texture representation-based motion segmentation for crowd counting. Mach. Vis. Appl. 2015, 26, 871–883. [Google Scholar] [CrossRef]
- Cabral, B.; Leedom, L.C. Imaging vector fields using line integral convolution. In Proceedings of the 20th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 2–6 August 1993; pp. 263–270. [Google Scholar]
- Liu, Z.; Moorhead, R.J. Accelerated unsteady flow line integral convolution. IEEE Trans. Vis. Comput. Graph. 2005, 11, 113–125. [Google Scholar] [PubMed]
- Fan, S.K.S.; Chuang, Y.C. An entropy-based image registration method using image intensity difference on overlapped region. Mach. Vis. Appl. 2011, 11, 113–125. [Google Scholar] [CrossRef]
- Moghaddam, R.F.; Cheriet, M. AdOtsu: An adaptive and parameterless generalization of Otsu’s method for document image binarization. Pattern Recognit. 2012, 45, 2419–2431. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, H.; Li, X. Target tracking for mobile robot platforms via object matching and background anti-matching. Robot. Auton. Syst. 2010, 58, 1197–1206. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E.; Masters, B.R. Representation and Description. In Digital Image Processing, 3rd ed.; Prentice-Hall Inc.: Upper Saddle River, NJ, USA, 2006. [Google Scholar]
- Unusual Crowd Activity Dataset of University of Minnesota. Available online: http://mha.cs.umn.edu/Movies/Crowd-Activity-All.avi (accessed on 1 February 2018).
- Sharif, M.H.; Djeraba, C. An entropy approach for abnormal activities detection in video streams. Pattern Recognit. 2012, 45, 2543–2561. [Google Scholar] [CrossRef]
- Xiong, G.; Cheng, J.; Wu, X.; Chen, Y.L.; Qu, Y.; Xu, Y. An energy model approach to people counting for abnormal crowd behavior detection. Neurocomputing 2012, 83, 121–135. [Google Scholar] [CrossRef]
- Ihaddadene, N.; Djeraba, C. Real-time crowd motion analysis. In Proceedings of the ICPR 2008 19th International Conference on Pattern Recognition, Tampa, FL, USA, 8–11 December 2008; pp. 1–4. [Google Scholar]
- Lawrence, N.D. Gaussian process latent variable models for visualisation of high dimensional data. In Advances in Neural Information Processing Systems; The MIT Press: Cambridge, MA, USA, 2003; Volume 16, pp. 844–851. [Google Scholar]
- Mousas, C. Full-Body Locomotion Reconstruction of Virtual Characters Using a Single Inertial Measurement Unit. Sensors 2017, 17, 2589. [Google Scholar] [CrossRef] [PubMed]
- Chai, J.; Hodgins, J.K. Performance animation from low-dimensional control signals. ACM Trans. Graph. 2005, 24, 686–696. [Google Scholar] [CrossRef]
- Karamouzas, I.; Skinner, B.; Guy, S.J. Universal power law governing pedestrian interactions. Phys. Rev. Lett. 2014, 113, 238701. [Google Scholar] [CrossRef] [PubMed]
- Karamouzas, I.; Overmars, M. Simulating and evaluating the local behavior of small pedestrian groups. IEEE Trans. Vis. Comput. Graph. 2012, 18, 394–406. [Google Scholar] [CrossRef] [PubMed]
- Mousas, C.; Newbury, P.; Anagnostopoulos, C.N. The minimum energy expenditure shortest path method. J. Graph. Tools 2013, 17, 31–44. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Descriptor | Explanation | Formula |
|---|---|---|
| Uniformity | A measure of uniformity in the range [0, 1]. Uniformity is 1 for a constant energy-level. | |
| Entropy | Measures the randomness of the elements of . | |
| Contrast | A measure of energy-level contrast between a particle and its neighbor over the entire image. |
| Scene 1 | Scene 2 | Scene 3 | |
|---|---|---|---|
| k | 0.412 | 0.628 | 0.680 |
| Eground | 0.490 | 0.692 | 0.849 |
| Scene1 | Scene 2 | Scene 3 | |
|---|---|---|---|
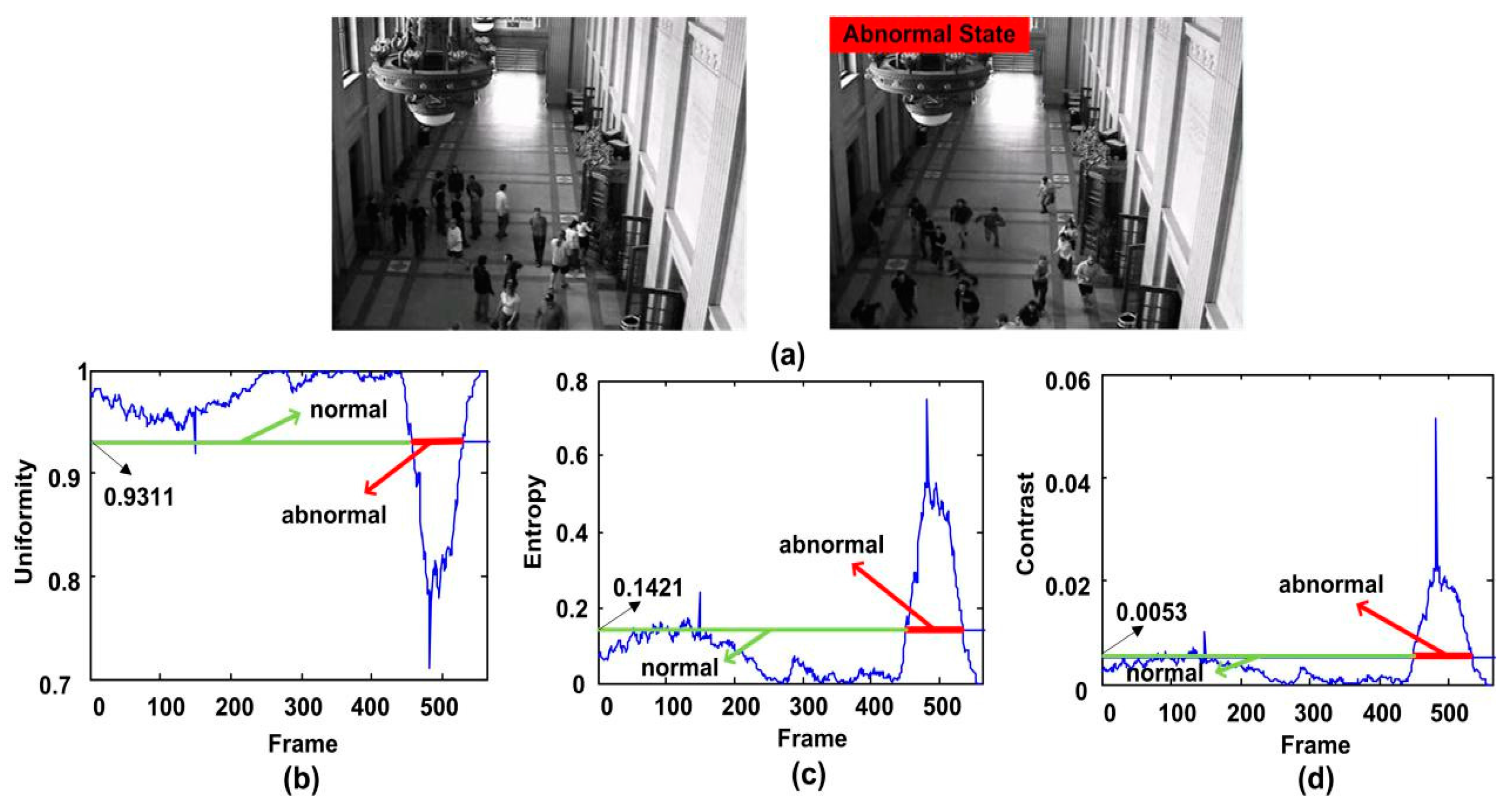
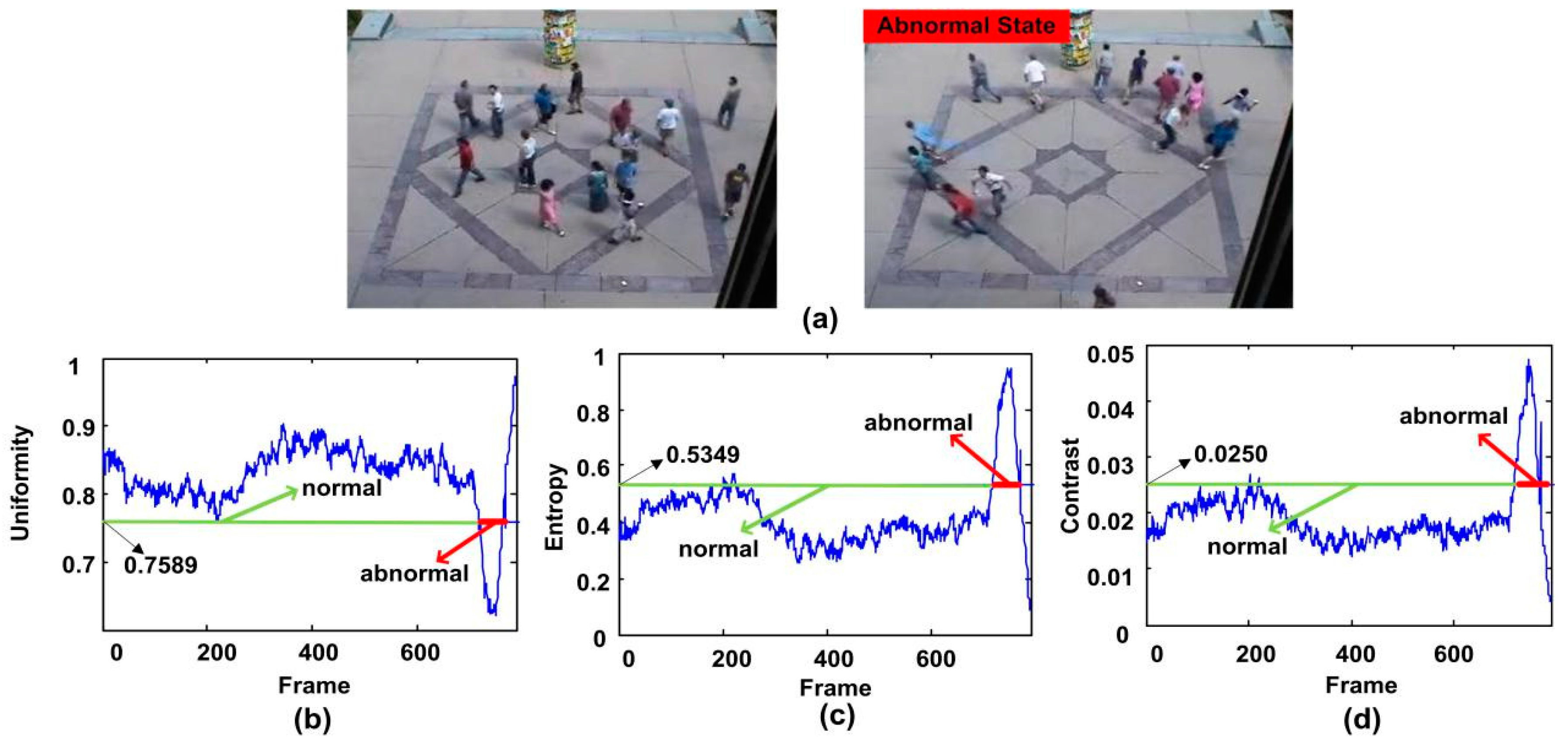
| Uniformity | 0.9311 | 0.7589 | 0.8730 |
| Entropy | 0.1421 | 0.5349 | 0.2994 |
| Contrast | 0.0053 | 0.0250 | 0.0174 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhang, Q.; Hu, S.; Guo, C.; Yu, H. Energy Level-Based Abnormal Crowd Behavior Detection. Sensors 2018, 18, 423. https://doi.org/10.3390/s18020423
Zhang X, Zhang Q, Hu S, Guo C, Yu H. Energy Level-Based Abnormal Crowd Behavior Detection. Sensors. 2018; 18(2):423. https://doi.org/10.3390/s18020423
Chicago/Turabian StyleZhang, Xuguang, Qian Zhang, Shuo Hu, Chunsheng Guo, and Hui Yu. 2018. "Energy Level-Based Abnormal Crowd Behavior Detection" Sensors 18, no. 2: 423. https://doi.org/10.3390/s18020423
APA StyleZhang, X., Zhang, Q., Hu, S., Guo, C., & Yu, H. (2018). Energy Level-Based Abnormal Crowd Behavior Detection. Sensors, 18(2), 423. https://doi.org/10.3390/s18020423