1. Introduction
Recently, Positioning, Navigation and Timing (PNT) information is essential for many applications, for example, smart mobile devices. Global Navigation Satellite System (GNSS) is the most widely used PNT provider, since it is easy to access the satellites signals all over the world [
1,
2,
3]. A cheap receiver in a chip manner is sufficient for many applications, for instance, vehicle, smart phone, or the shared bicycle [
1,
2,
3,
4,
5,
6]. Narrowly speaking, GNSS refers to the United States of America (USA) Global Positioning System (GPS), European Galileo satellite navigation system, China BeiDou satellite navigation system (constructing), and Russia GLONASS navigation system [
4,
5,
6], they aim to provide PNT service covering the earth for both civil and military users; broadly speaking, other regional satellite navigation systems are also included, for instance, Japan Quasi-Zenith Satellite System (QZSS) and Indian Regional Navigation Satellite System (IRNSS) [
4,
5,
6]. With more and more satellites available in orbit broadcasting navigation signals, the user is able to make full use of more satellites signals in navigation solutions determination, which efficiently improves the reliability and continuity of the navigation solutions [
4,
5,
6]. However, under some signal challenging or degraded environments, for instance, urban canyon and dense forests, the satellites signals are weak or even blocked, which makes it hard to output ideal or precise navigation solutions for the GNSS standalone navigation system [
5,
6,
7,
8]. Researchers have been devoted to overcome this problem and improve the performance under these signals degrading conditions [
7,
8,
9,
10]. Basically, there are two popular approaches in the navigation community. The first approach is to develop highly sensitive GNSS receiver for weak signals tracking, specifically high sensitive carrier tracking loop [
11]. Abundant results have been published on this topic, including Vector Tracking Loop (VTL), Multiple Vector Tracking Loop (MVTL), and some other advanced carrier tracking loops design [
11,
12,
13,
14,
15,
16,
17,
18]. However, it is not sufficient for signal outage, no navigation solutions will be output, while GNSS signals are temporarily blocked by the buildings or something else [
19,
20].
The second approach is to integrate GNSS with other sensors, for instance, the Inertial Navigation System (INS), Visual navigation system, or LiDAR navigation system [
21,
22,
23]. GNSS/INS integration system is the most popular for providing navigation solutions, including position, velocity, and attitude information. Inertial Navigation System (INS) is a self-contained navigation system which generates continuous navigation solutions by processing the measurements from Inertial Measurement Unit (IMU). IMU usually contains three orthogonal gyroscope and three orthogonal accelerometers, in which the gyroscope measures the angle rate and the accelerometer collects the acceleration motion [
24,
25,
26]. When compared with GNSS, the navigation solutions updating frequency is higher, while the INS is usually 400 Hz or 200 Hz, and the updating frequency of the GNSS solutions is commonly 1–10 Hz [
21,
22,
23,
24,
25]. However, the GNSS is capable of providing precise location with well accessible signals, while the errors of the INS diverges over time, due to the various unavoidable noises contained in the raw measurements or signals of the employed gyroscopes and accelerometers. The advantage of the GNSS/INS integration navigation system is that the INS can still provide the navigation solutions, while the GNSS fails to generate navigation solutions. Therefore, it is of great value to improve the INS accuracy during GNSS signal outage.
Conventional fiber optic or laser gyroscope is of large size with high cost and it is not proper or suitable for certain applications, especially handheld or portable devices. Microelectromechanical systems (MEMS) IMU is increasingly popular recently, which is manufactured using MEMS technology. MEMS IMU has much smaller size and lower cost, and it has been widely used in mobile or handheld devices, vehicle navigation and weapons guidance [
26,
27,
28,
29,
30,
31,
32,
33,
34,
35]. However, compared with the highly accurate laser or fiber optic IMU, MEMS IMU usually experiences more complicated noises [
26,
27,
28,
29,
30,
31,
32]. Scholars are always devoted to model the noises and compensate the divergence errors to improve the accuracy of MEMS IMU based navigation system, which can broaden the MEMS IMU applications furtherly [
27,
28,
29,
30,
31,
32,
33,
34,
35]. As illustrated in previous papers, the MEMS IMU noise modelling or analysis method can be classified to the statistical method and Artificial Intelligence (AI) method [
33,
34,
35,
36]. The statistical methods include Auto Regressive Moving Average (ARMA) and Allan Variance (AV), especially the Allan Method has been widely used to analyze and describe the composition of the gyroscope or the accelerometer noise contained in the output raw signals [
33,
34,
35,
36]. Generally, the five basic description parameters are termed as: quantization noise, angle random walk, bias instability, rate random walk, and rate ramp [
33,
34,
35,
36]. The other method is the Artificial Intelligence, which refers to Support Vector Machine (SVM) and Neural Networks (NN). SVM and various Neural Networks are employed in MEMS IMU de-noising and they have been evaluated by many researchers [
33,
34,
35,
36].
For both statistical or AI methods, gyroscope or accelerometer raw signals are treated as time series, and a model is described or learned to compensate the errors caused by the noises. Performance of the statistical method is limited by the fixed model parameters, and the traditional AI method has restricted learning capacity which is determined by the structure and working principles [
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36]. Recently, Deep Learning (DL) gains a boom in various applications, which has a better learning capacity than conventional SVM or neural networks [
37,
38]. Deep Recurrent Neural Networks (RNN) is specifically for processing time series data and has been demonstrated effectively in this kind of application [
38,
39,
40]. In our previous paper, a Long Short Term Memory Unit (LSTM) (a variant of RNN) was evaluated in MEMS gyroscope de-noising, and experiments included a comparison of LSTM-RNN with ARMA, single-layer LSTM, and multi-layer LSTM [
38]. Limitations of the proposed algorithms exposed in the paper were listed as following:
- (1)
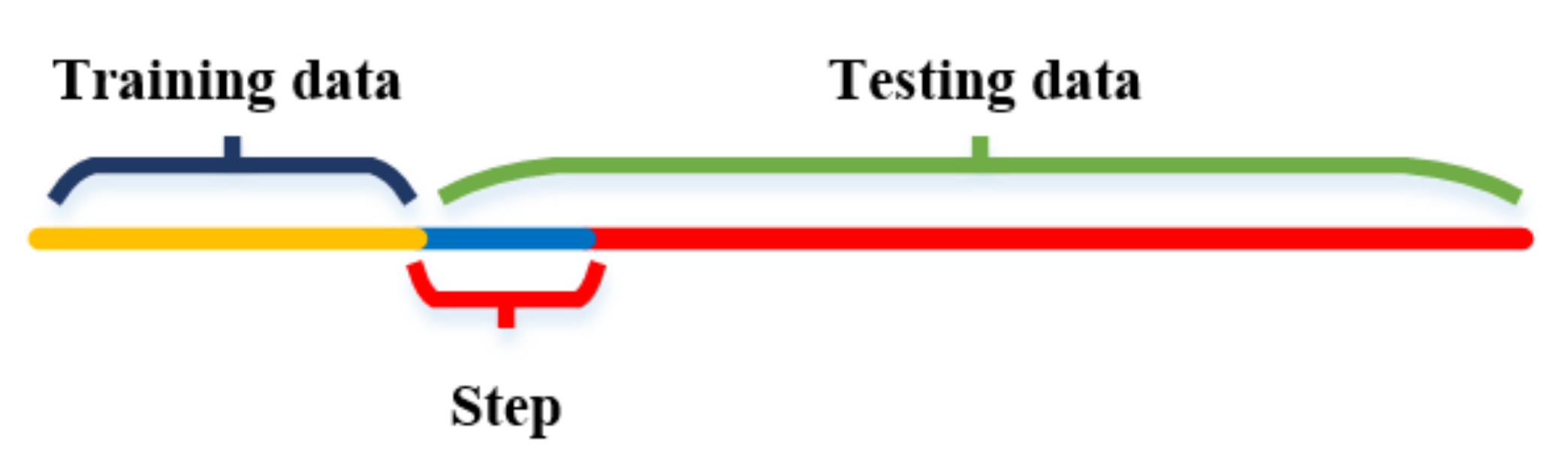
Training data length is fixed and not long enough, it might be meaningful to explore the influence of the training data length on the deep RNN performance; and,
- (2)
Only Standard Deviation of the de-noised signals were presented and compared, but no detailed or further analysis of compensation, which could be a support of selecting proper neural networks for each MEMS IMU.
In this paper, an advanced variant of RNN Simple Recurrent Unit (SRU) was investigated in MEMS IMU based navigation system for accuracy improvement. When compared with LSTM, SRU has less simple structure with faster training speed, specifically; the SRU has less parameter that need to be determined during training procedure [
39,
40]. We think the extensions or contributions of this paper are as follows:
- (1)
Influence of training dataset length on the SRU-RNN prediction were investigated and explored, it might be meaningful for reducing computation load;
- (2)
Compensation degrees of the major noise parameters describing MEMS IMU performance were presented and compared, which might support the selection of proper or suitable RNN variants for MEMS IMU de-noising;
- (3)
SRU was firstly employed in this application; the results could be compared with LSTM presented in our previous paper for selecting proper RNN in MEMS IMU de-noising.
Reminder of this paper is organized as: (1) the second section gives the basic mathematical equations and the information flow of the popular SRU-RNN; (2) in the next section, the experiments results and comparisons are presented to support the conclusions; (3) final sections include the conclusion, discussion, and reference.

 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}