Optimal Sensor Formation for 3D Cooperative Localization of AUVs Using Time Difference of Arrival (TDOA) Method


Abstract
1. Introduction
- Target AUVs are to be localized underwater in ℜ3, while the sensors of AUVs are generally placed on the surface of water in 2D. This is contrary to what was considered in most of the previous literature, where sensors and targets were considered to be placed in 2D only. In the few cases where 3D localization was considered, it was assumed that both sensors and targets can be located anywhere in 3D.
- Another important aspect that is to be considered for underwater localization is that measurement noise is distance-dependent due to acoustic signal spreading.
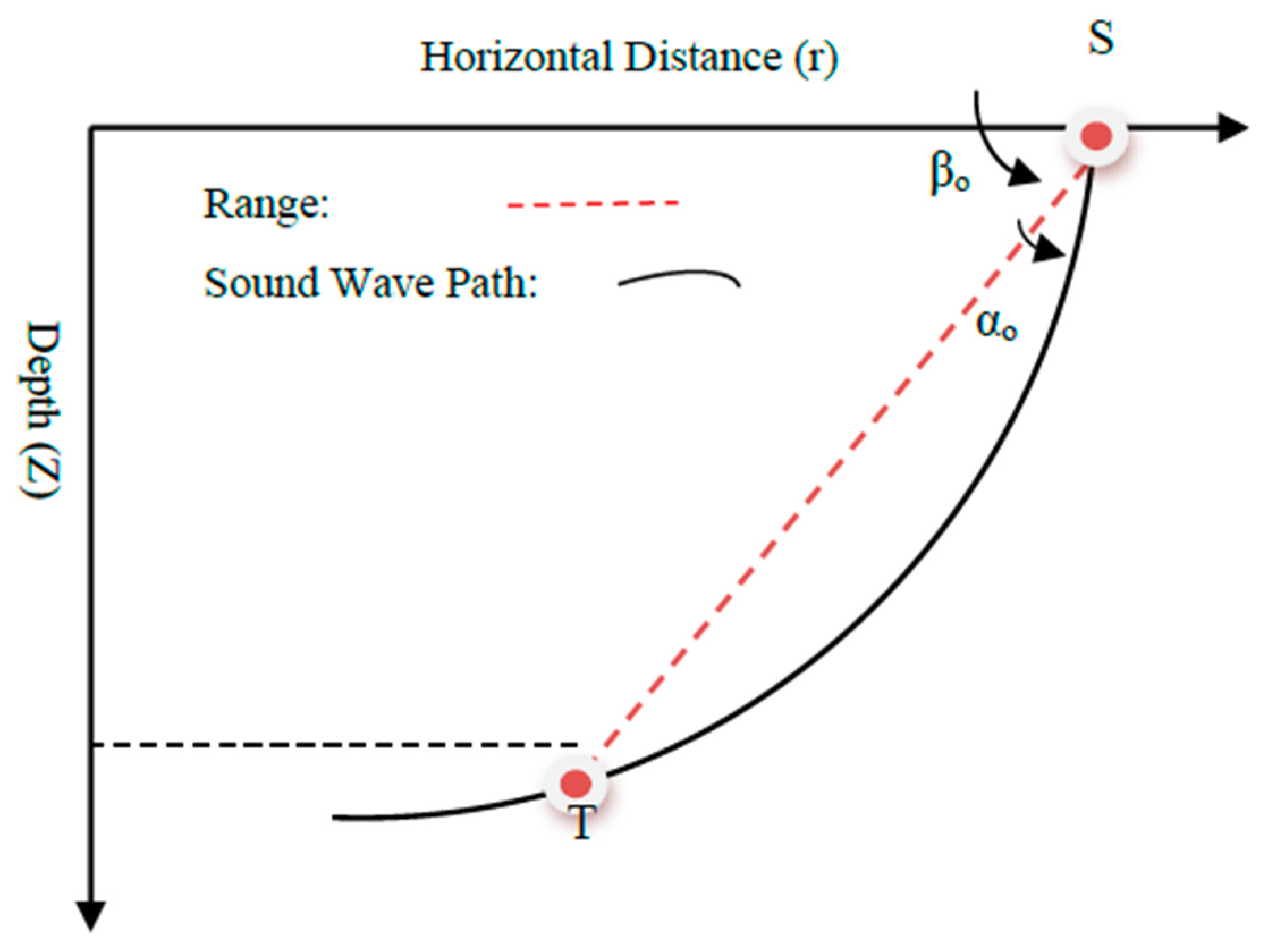
- Underwater TDOA measurements depend upon the speed of sound, which varies with the depth. Moreover, the acoustic wave does not travel in a straight path, as is the case for above water waves. However, in the literature of cooperative localization and sensor placement, the speed of sound was mostly taken as a constant, and sound wave was considered to be traveling in a straight line.
2. Problem Formulation
- A direct propagation path exists between the sensors and the target in the presence of a typical underwater multipath environment.
- It is possible to pick up and identify the first received wave to measure the time of arrival.
- The SSP is known, and the sound speed is only depth-dependent (isogradient) i.e., the field of interest is vertically stratified.
3. Derivation of Evaluation Function
3.1. Single-Target Cooperative Localization
3.1.1. Centralized Sensor Pairing (CSP)
3.1.2. De-Centralized Sensor Pairing
3.2. Multiple Targets Cooperative Localization
3.3. Uncertainty in the Targets’ Location
- We assumed that the Probability Density Function (PDF) of the jth target is a uniform distribution within a square area centered on , and the PDF is defined as follows:
- Based on the Monte-Carlo method, we built a sampling function with uniformly distributed input. By randomly selecting number from and putting it in , we obtain 100 possible values in the range of as follows:
- As shown in Figure 3, two sets of 10 random numbers, satisfying the uniform distribution within , are sequentially generated to constitute the position of the targets. The FIM of each target relative to each sensor is calculated, and the determinant of the matrix is summed and averaged to obtain for Equation (21).
4. Iterative Stepping Algorithm
- For each target AUV, calculate FIM(j) based on all of the sensor AUVs’ present positions (. Calculate the determinant of the FIM, , in order to get the evaluation in current step as .
- Calculate the derivative of the current evaluation function with respect to the “x” and “y” coordinates of each sensor AUV. Denote the derivatives as and .
- Update the position of each sensor AUV as follows:where S is the step size for each calculation step, and is taken as 100.
- Calculate FIM(j) based on the updated sensor positions , and subsequently calculate the evaluation function as .
- Compare the present step evaluation function to the previous step evaluation. If , it means that the updated sensors’ positions can improve the observability of the system. So, go back to step (1) to start the next calculation based on the updated sensors’ positions. If , it means that the current sensors’ positions are optimal for cooperation localization, as the system observability is at its maximum. The algorithm is to be terminated.
5. Simulation Examples
5.1. Single-Target Cooperative Localization System
5.1.1. Centralized Sensor Pairing
5.1.2. De-Centralized Sensor Pairing
5.2. Multiple-Targets Cooperative Localization System
5.2.1. 3 + 1 Sensors—2 Targets
5.2.2. 4 + 1 Sensors: Three Targets
5.2.3. 5 + 1 Sensors: Three Targets
5.3. Cooperative Localization Example with Uncertainty in Target Locaion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Burdic, W.S. Underwater Acoustic System Analysis, 2nd ed.; Peninsula Publishing: Newport Beach, CA, USA, 2002. [Google Scholar]
- Shi, W.T. DSP-Based Embedded Control System Design of Underwater Vehicle. Master’s Thesis, Harbin Engineering University, Harbin, China, 2010. [Google Scholar]
- Yu, C. Research on Technology of AUV Integrated Navigation System Based on Multivariate Information Fusion. Master’s Thesis, Ocean University of China, Qingdao, China, 2010. [Google Scholar]
- Wang, L.; Liu, Y.-H.; Wan, J.-W.; Shao, J.-X. Multi-robot cooperative localization based on relative bearing. Chin. J. Sens. Actuators 2007, 20, 794–799. [Google Scholar]
- Zhang, F.-B.; Zhang, X.-L.; Ma, P. An algorithm of multi-AUVs cooperative location considering clock synchronization. Torpedo Technol. 2013, 21, 355–359. [Google Scholar]
- Li, W.-B.; Liu, M.-Y.; Lei, X.-K.; Pei, X. Cooperative navigation for multiple autonomous underwater vehicles with single leader in unknown ocean current. Acta Armamentarii 2011, 32, 292–297. [Google Scholar]
- Etter, P.C. Underwater Acoustic Modeling and Simulation, 3rd ed.; Spon Press: London, UK, 2003. [Google Scholar]
- Poursheikhali, S.; Zamiri-Jafarian, H. TDOA based target localization in inhomogeneous underwater wireless sensor network. In Proceedings of the 5th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 29 October 2015. [Google Scholar]
- Baccou, P.; Jouvencel, B.; Creuze, V. Single beacon acoustic for AUV navigation. In Proceedings of the International Conference on Advanced Robotics, Budapest, Hungary, 22−25 August 2001. [Google Scholar]
- Fang, X.-P.; Yan, W.-S. Formation optimization for cooperative localization based on moving long baseline with two leader AUVs. Acta Armamentarii 2012, 33, 1020–1024. [Google Scholar]
- Fang, X.-P.; Zhang, F.-B.; Li, J.-B. Formation Geometry of Underwater Positioning Based on Multiple USV/AUV. Syst. Eng. Electron. 2014, 36, 947–951. [Google Scholar]
- Moreno-Salinas, D.; Pascoal, A.M.; Aranda, J. Optimal Sensor Placement for Multiple Underwater Target Localization with Acoustic Range Measurements. IFAC Proc. Vol. 2011, 44, 12825–12832. [Google Scholar] [CrossRef]
- Moreno-Salinas, D.; Pascoal, A.M.; Aranda, J. Optimal Sensor Placement for Underwater Positioning with Uncertainty in the Target Location. In Proceedings of the International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Moreno-Salinas, D.; Pascoal, A.M.; Almansa, J.A. Optimal Sensor Placement for Multiple Target Positioning with Range-Only Measurements in Two-Dimensional Scenarios. Sensors 2013, 13, 10674–10710. [Google Scholar] [CrossRef] [PubMed]
- Moreno-Salinas, D.; Pascoal, A.M.; Almansa, J.A. Sensor networks for optimal target localization with bearing-only measurements in constrained three dimensional scenarios. Sensors 2013, 13, 10386–10417. [Google Scholar] [CrossRef] [PubMed]
- Moreno-Salinas, D.; Pascoal, A.M.; Aranda, J. Underwater Target Positioning with a Single Acoustic Sensor. IFAC Proc. Vol. 2013, 46, 233–238. [Google Scholar] [CrossRef]
- Moreno-Salinas, D.; Pascoal, A.M.; Aranda, J. Optimal Sensor Placement for Acoustic Underwater Target Positioning with Range-Only Measurements. IEEE J. Ocean. Eng. 2016, 41, 620–643. [Google Scholar] [CrossRef]
- Doğançay, K.; Hmam, H. On optimal sensor placement for time-difference-of-arrival localization utilizing uncertainty minimization. In Proceedings of the 17th European Signal Processing Conference, Glasgow, UK, 24–28 August 2009. [Google Scholar]
- Hamdollahzadeh, M.; Adelipour, S.; Behnia, F. Recursive sensor placement in two dimensional TDOA based localization. In Proceedings of the 24th Iranian Conference on Electrical Engineering (ICEE), Shiraz, Iran, 10–12 May 2016. [Google Scholar]
- Domingo-Pereza, F.; Lazaro-Galileaa, J.L.; Wieserb, A.; Martin-Gorostizaa, E.; Salido-Monzua, D.; de la Llanaa, A. Sensor placement determination for range-difference positioning using evolutionary multi-objective optimization. Expert Syst. Appl. 2016, 47, 95–105. [Google Scholar] [CrossRef]
- Hamdollahzadeh, M.; Adelipour, S.; Behnia, F. Optimal sensor configuration for two dimensional source localization based on TDOA/FDOA measurements. In Proceedings of the 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016. [Google Scholar]
- Meng, W.; Xie, L.; Xiao, W. Optimal TDOA Sensor-Pair Placement with Uncertainty in Source Location. IEEE Trans. Veh. Technol. 2016, 65, 9260–9271. [Google Scholar] [CrossRef]
- Ramezani, H.; Jamali-Rad, H.; Leus, G. Target Localization and Tracking for an Isogradient Sound Speed Profile. IEEE Trans. Signal Process. 2013, 61, 1434–1446. [Google Scholar] [CrossRef]
- Berger, C.R.; Zhou, S.; Willett, P.; Liu, L. Stratification Effect Compensation for Improved Underwater Acoustic Ranging. IEEE Trans. Signal Process. 2008, 56, 3779–3783. [Google Scholar] [CrossRef]
- Hovem, J.M. Modeling and Measurement Methods for Acoustic Waves and for Acoustic Microdevices; InTech: London, UK, 2013. [Google Scholar]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation and Modulation Theory; Wiley: Hoboken, NJ, USA, 2001; Volume 1. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor AUVs | Optimal Positions | |
|---|---|---|
| X-Coordinate | Y-Coordinate | |
| Sensor 2 | −20.02 | 49.73 |
| Sensor 3 | −43.55 | 0 |
| Sensor 4 | −20.02 | −49.73 |
| Reference Sensor Position | Optimal Positions | ||
|---|---|---|---|
| Sensor 1 | Sensor 2 | Sensor 3 | |
| [25, 0] | [−20.02, 49.73] | [−43.55, 0] | [−20.02, −49.73] |
| [50, 0] | [−15.16, 45.35] | [−39.90, 0] | [−15.16, −45.35] |
| [75, 0] | [−12.88, 42.06] | [−34.49, 0] | [−12.88, −42.06] |
| Target Depth | Optimal Positions | ||
|---|---|---|---|
| Sensor 1 | Sensor 2 | Sensor 3 | |
| 25 m | [−18.61, 137.69] | [−27.97, −16.20] | [18.82, −7.91] |
| 50 m | [−29.98, 170.14] | [−54.10, −31.23] | [34.75, −11.22] |
| 75 m | [−37.78, 201.37] | [−76.6, −48.93] | [47.67, −21.95] |
| Sensor–Target Configuration | Estimated Optimal Positions | ||||
|---|---|---|---|---|---|
| Sensor 1 | Sensor 2 | Sensor 3 | Sensor 4 | Sensor 5 | |
| 3 + 1 sensors; 2 targets | −11.74, 53.10 | −44.35, 7.98 | −26.71, −46.17 | x | x |
| 4 + 1 sensors; 3 targets | −0.58, 69.24 | −62.19, 35.40 | −38.60, −59.42 | 62.99, 12.86 | x |
| 5 + 1 sensors; 3 targets | 14.90, 66.32 | −66.86, 23.32 | −36.91, −60.39 | 62.96, 14.50 | −41.02, 59.55 |
| Sensor AUVs | Optimal Positions | |
|---|---|---|
| X-Coordinate | Y-Coordinate | |
| Sensor 2 | −20.02 | 49.73 |
| Sensor 3 | −43.55 | 0 |
| Sensor 4 | −20.02 | −9.73 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bo, X.; Razzaqi, A.A.; Wang, X. Optimal Sensor Formation for 3D Cooperative Localization of AUVs Using Time Difference of Arrival (TDOA) Method. Sensors 2018, 18, 4442. https://doi.org/10.3390/s18124442
Bo X, Razzaqi AA, Wang X. Optimal Sensor Formation for 3D Cooperative Localization of AUVs Using Time Difference of Arrival (TDOA) Method. Sensors. 2018; 18(12):4442. https://doi.org/10.3390/s18124442
Chicago/Turabian StyleBo, Xu, Asghar A. Razzaqi, and Xiaoyu Wang. 2018. "Optimal Sensor Formation for 3D Cooperative Localization of AUVs Using Time Difference of Arrival (TDOA) Method" Sensors 18, no. 12: 4442. https://doi.org/10.3390/s18124442
APA StyleBo, X., Razzaqi, A. A., & Wang, X. (2018). Optimal Sensor Formation for 3D Cooperative Localization of AUVs Using Time Difference of Arrival (TDOA) Method. Sensors, 18(12), 4442. https://doi.org/10.3390/s18124442