A Path Loss and Shadowing Model for Multilink Vehicle-to-Vehicle Channels in Urban Intersections


Abstract
1. Introduction
2. Method
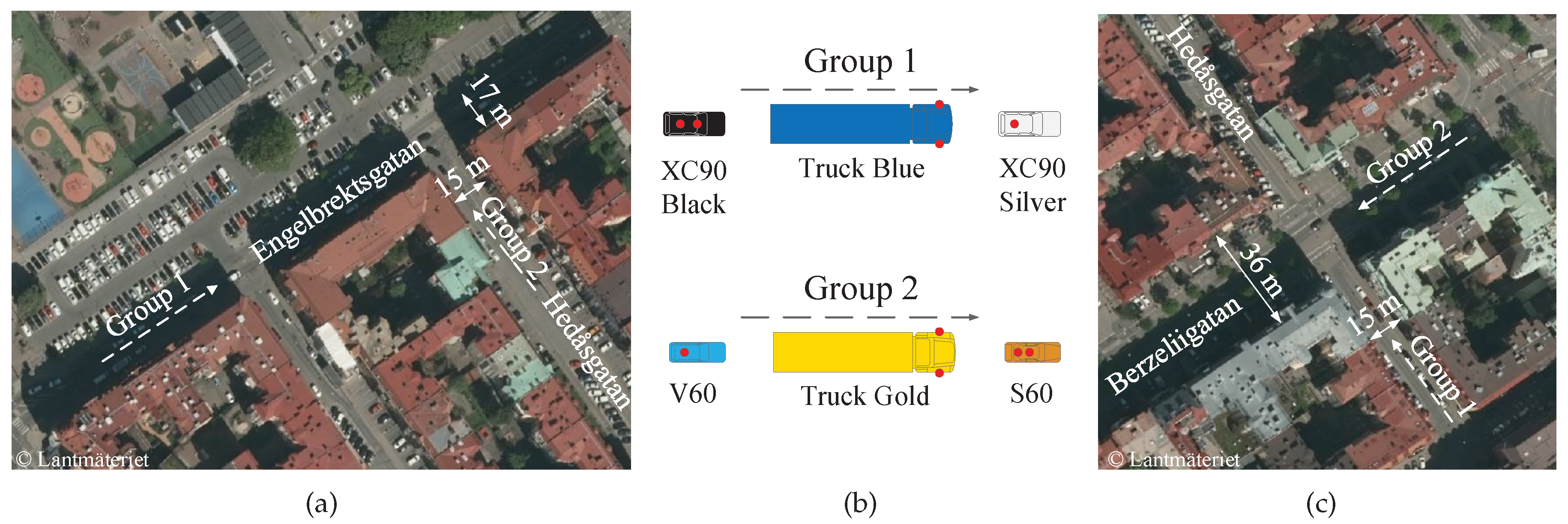
2.1. Measurement Description
2.2. Data Processing
2.3. Path Loss Model
3. Results
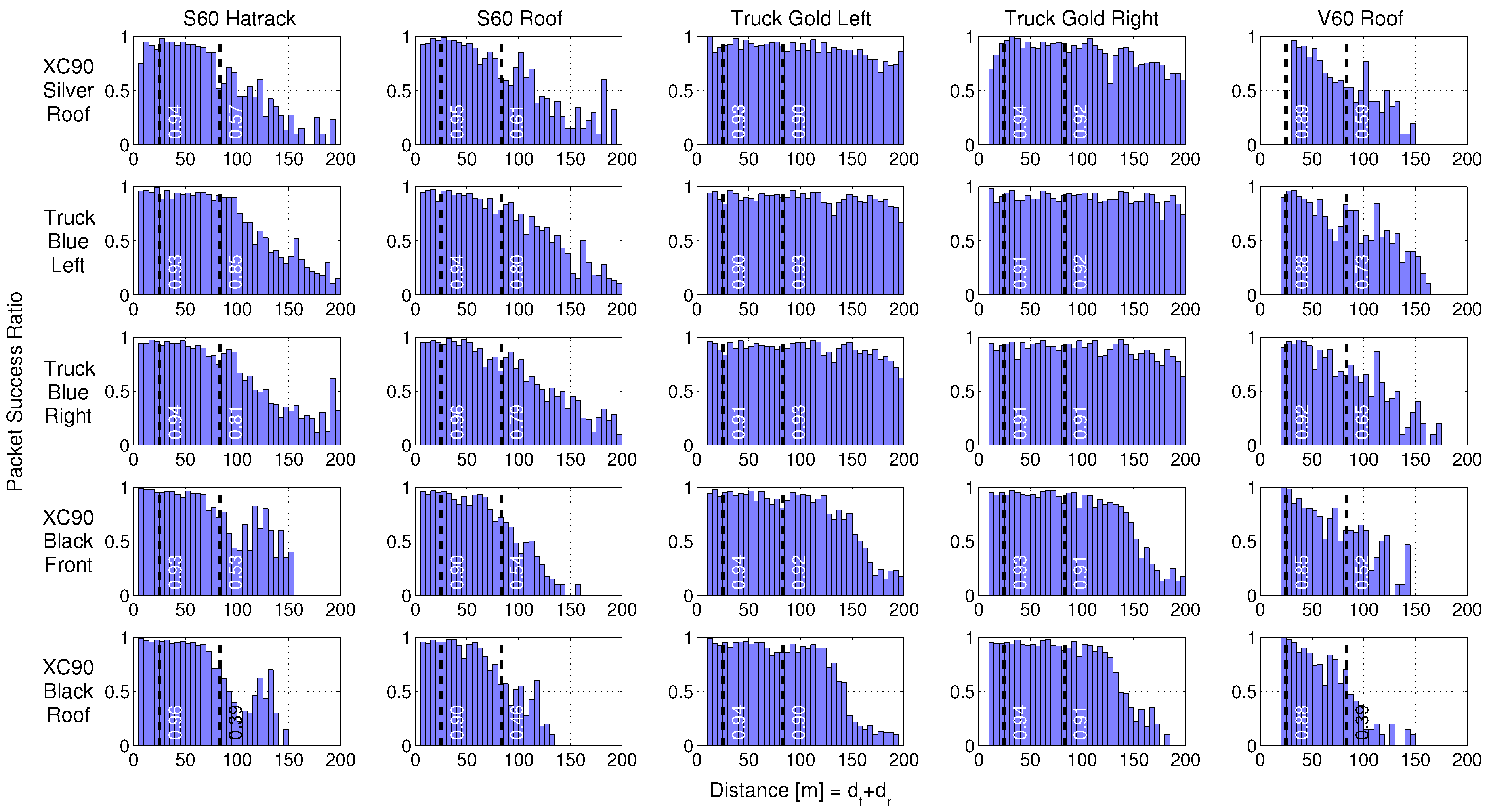
3.1. Packet Success Ratio
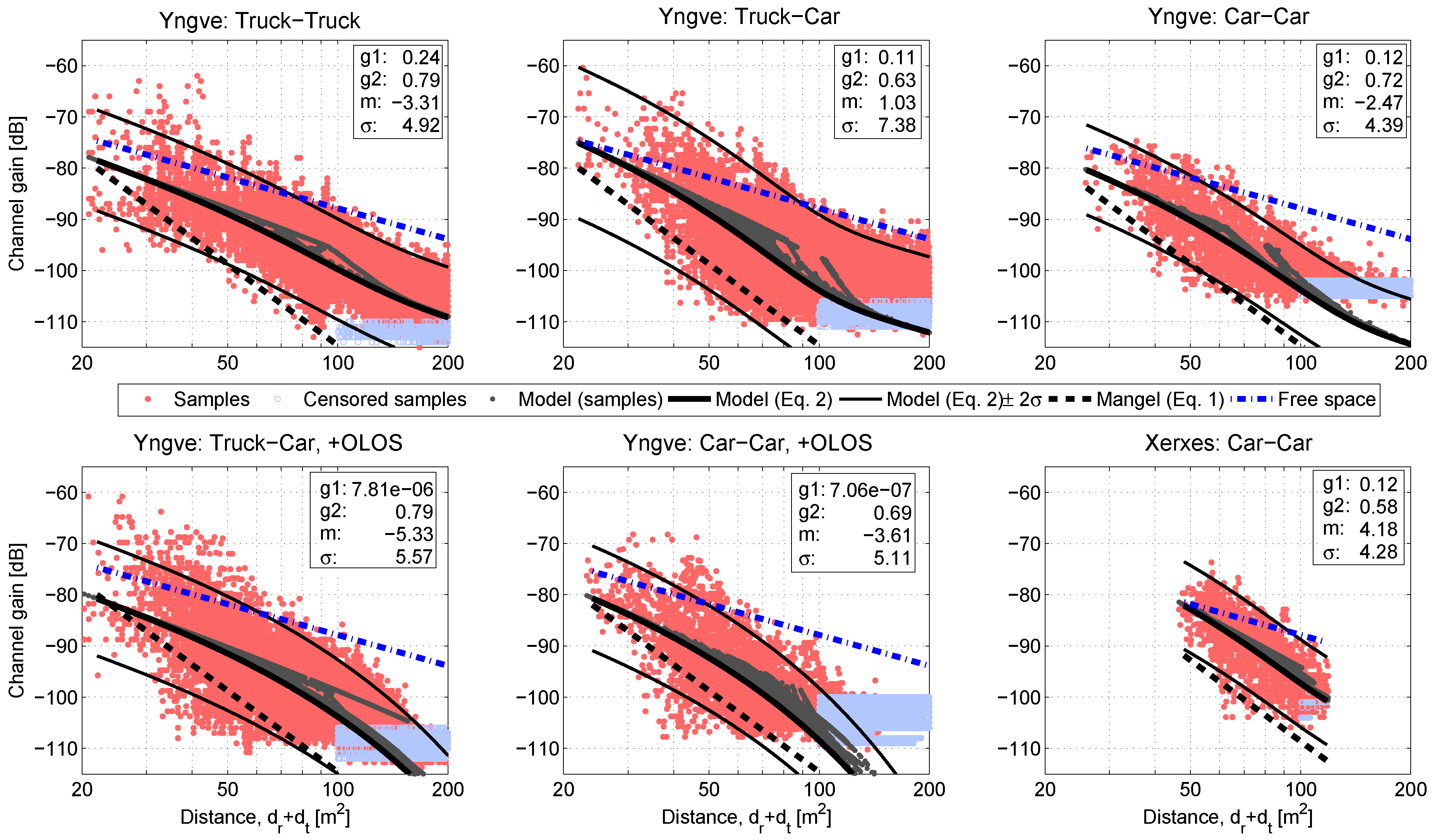
3.2. Channel Gain Model Estimation
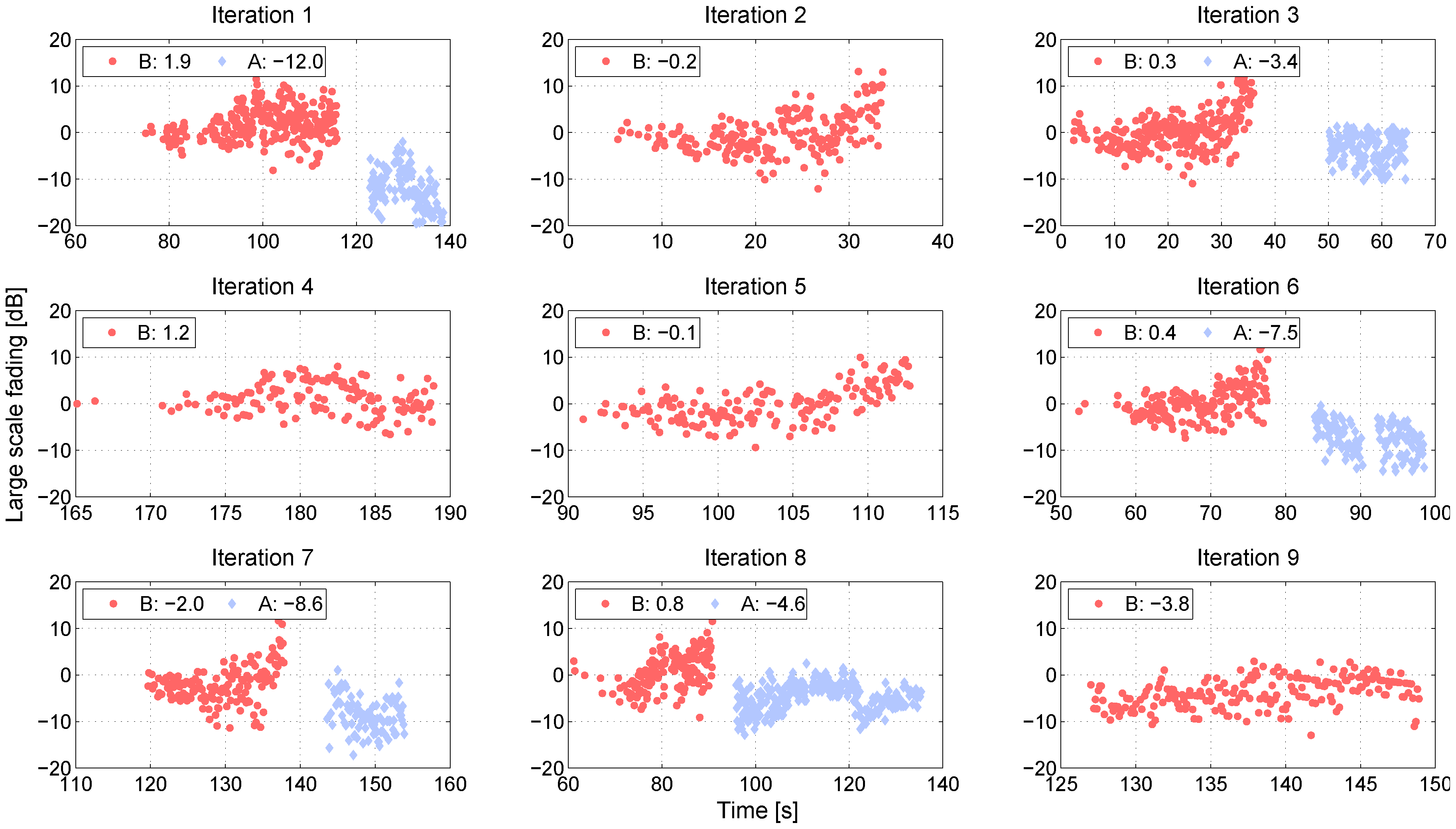
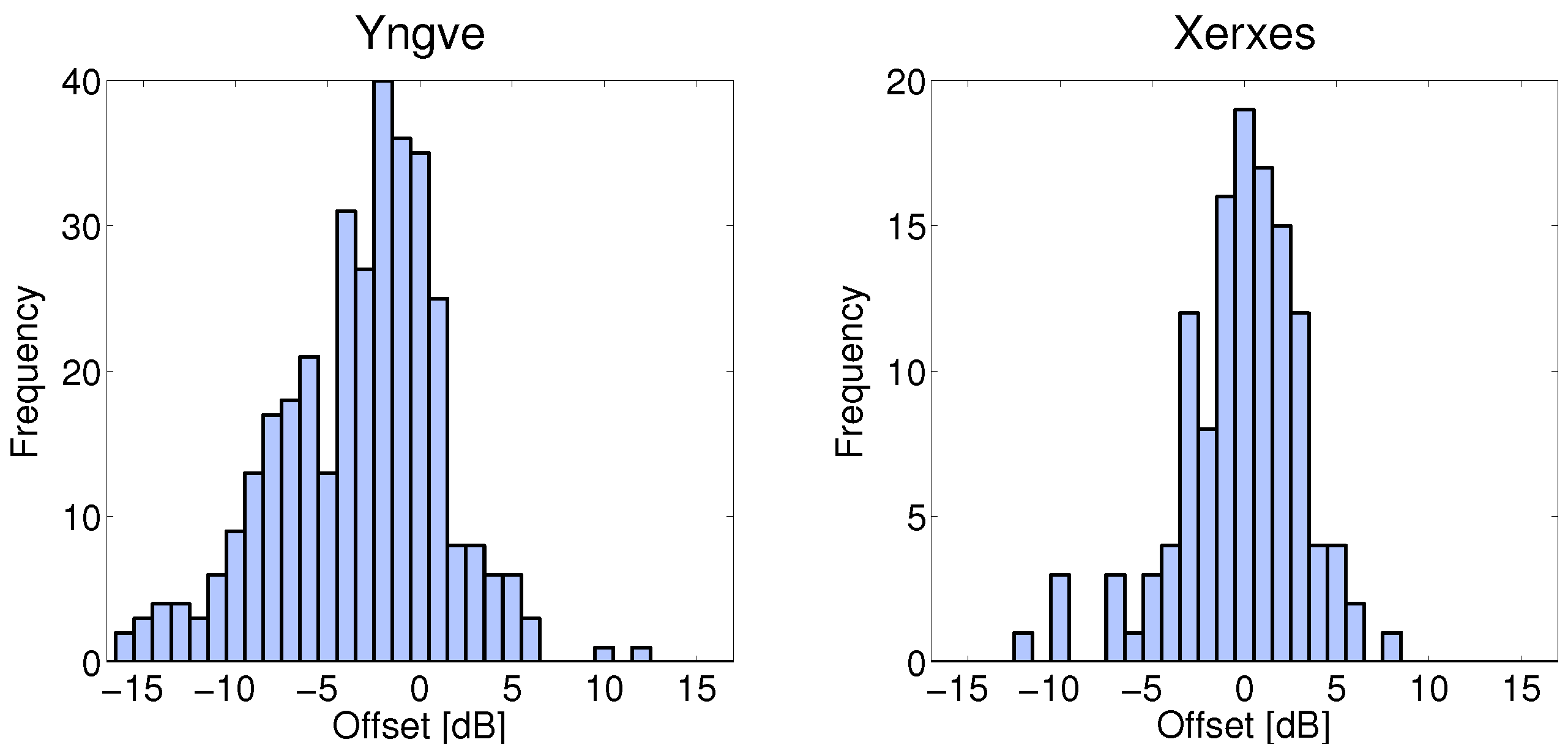
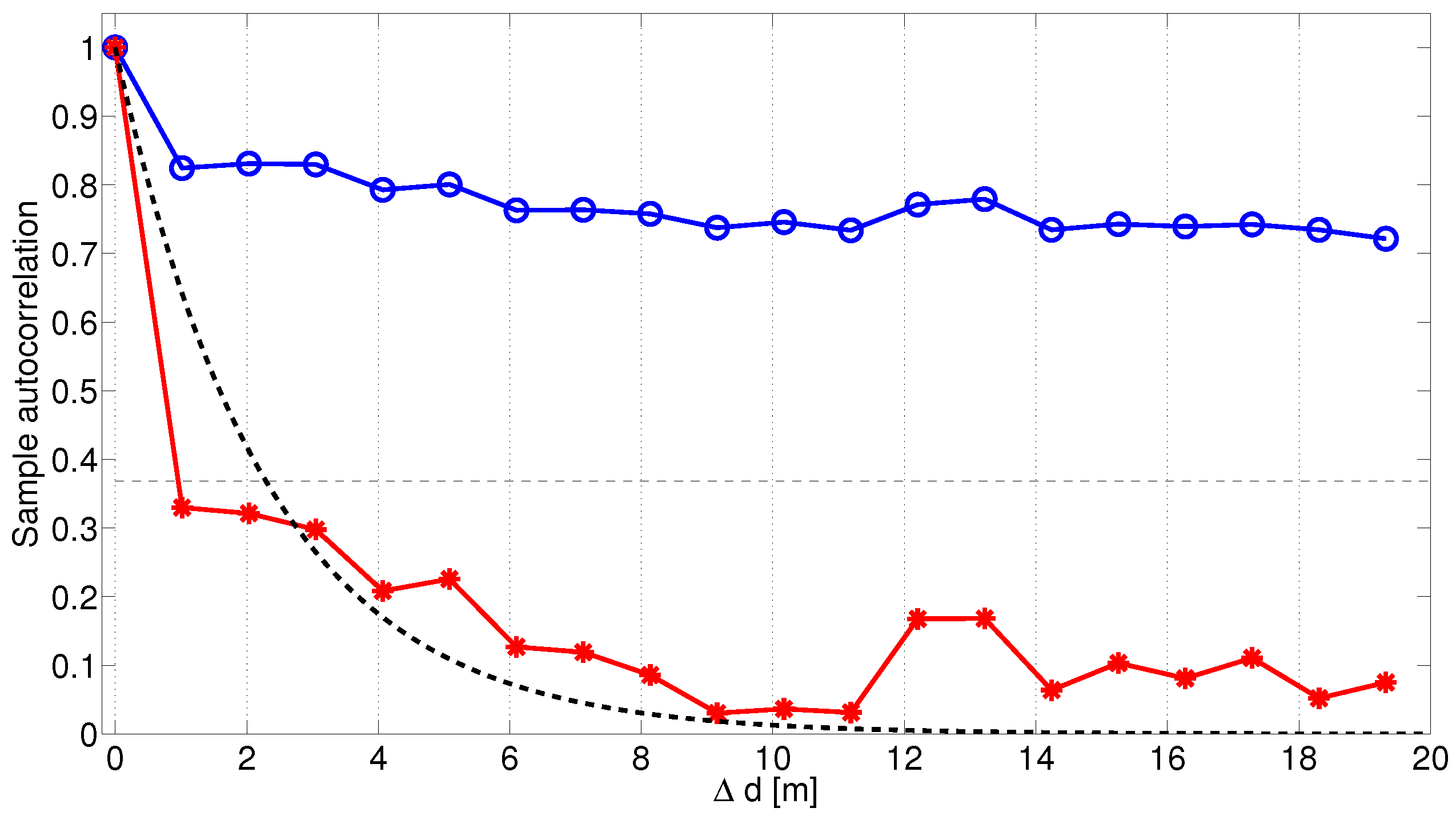
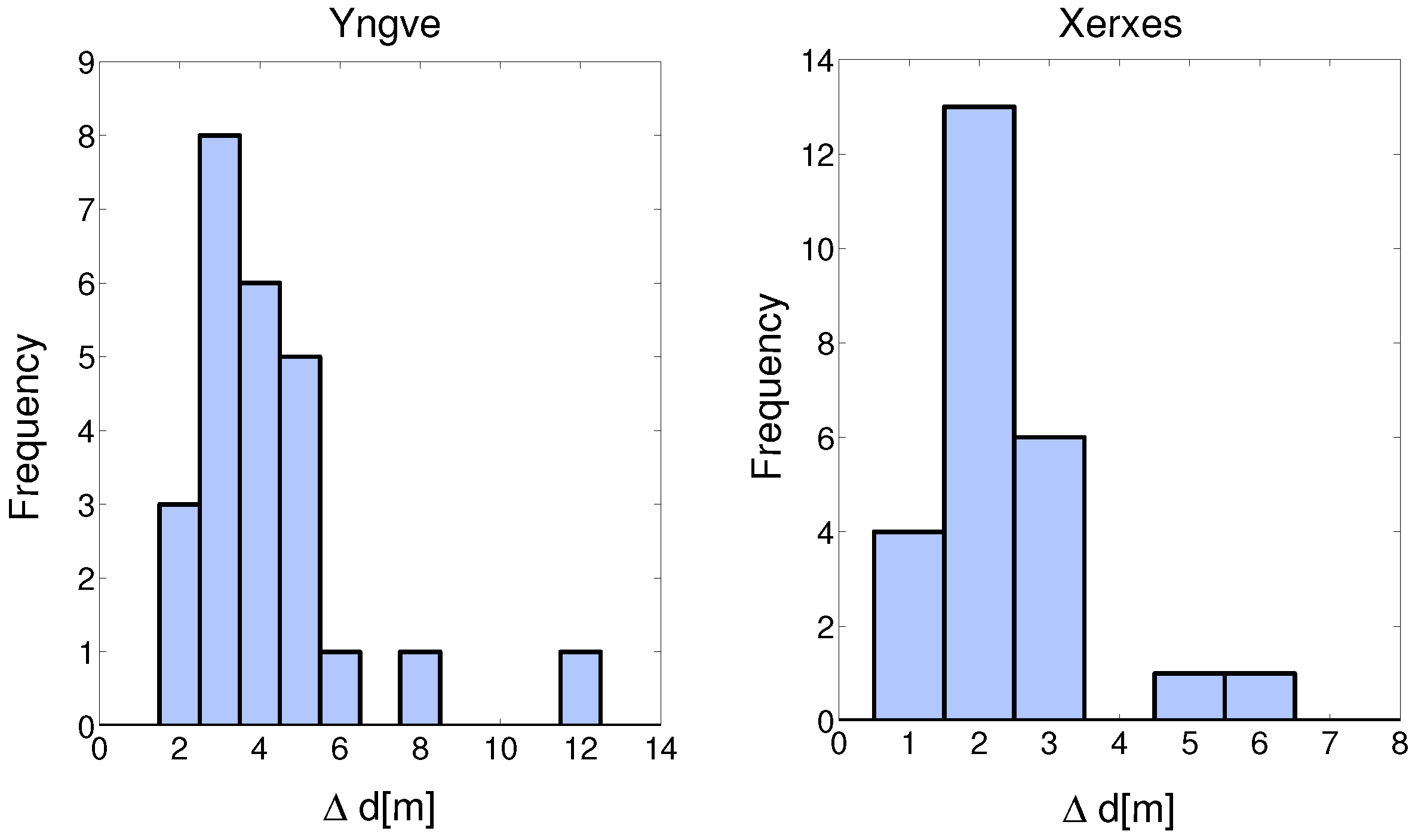
3.3. Spatial Correlation of Shadow Fading
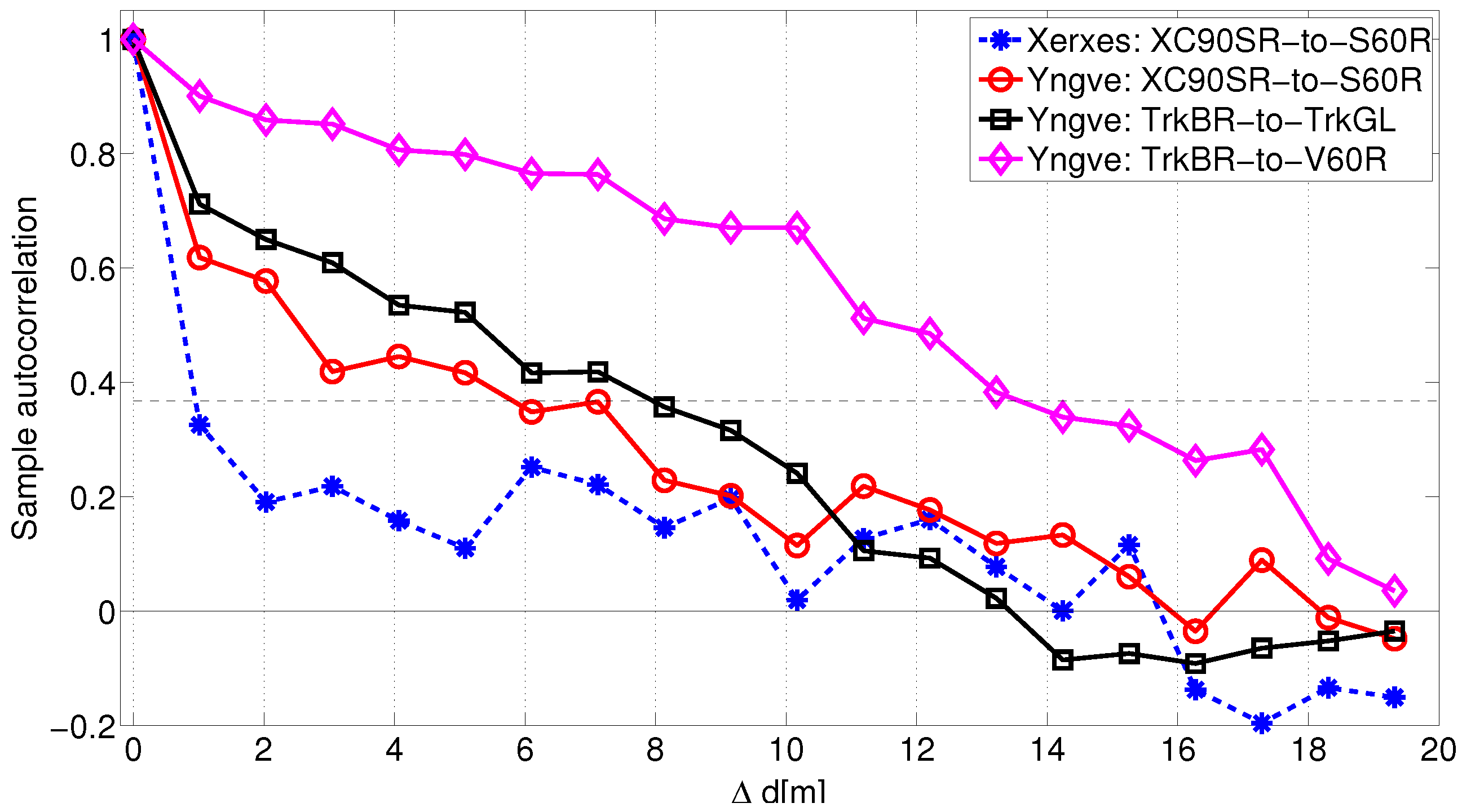
3.4. Multilink Shadowing Correlation
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mecklenbräuker, C.; Molisch, A.; Karedal, J.; Tufvesson, F.; Paier, A.; Bernado, L.; Zemen, T.; Klemp, O.; Czink, N. Vehicular Channel Characterization and Its Implications for Wireless System Design and Performance. IEEE Proc. 2011, 99, 1189–1212. [Google Scholar] [CrossRef]
- Matolak, D.W. V2V Communication Channels: State of Knowledge, New Results, and What’s Next. In Communication Technologies for Vehicles, Proceedings of the 5th International Workshop, Nets4Cars/Nets4Trains 2013, Villeneuve d’Ascq, France, 14–15 May 2013; Berbineau, M., Jonsson, M., Bonnin, J.M., Cherkaoui, S., Aguado, M., Rico-Garcia, C., Ghannoum, H., Mehmood, R., Vinel, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 1–21. [Google Scholar]
- Abbas, T. Measurement Based Channel Characterization and Modeling for Vehicle-to-Vehicle Communications. Ph.D. Thesis, Lund University, Lund, Sweden, 2014. [Google Scholar]
- Viriyasitavat, W.; Boban, M.; Tsai, H.M.; Vasilakos, A. Vehicular Communications: Survey and Challenges of Channel and Propagation Models. IEEE Veh. Technol. Mag. 2015, 10, 55–66. [Google Scholar] [CrossRef]
- Mahler, K.; Keusgen, W.; Tufvesson, F.; Zemen, T.; Caire, G. Measurement-Based Wideband Analysis of Dynamic Multipath Propagation in Vehicular Communication Scenarios. IEEE Trans. Veh. Technol. 2017, 66, 4657–4667. [Google Scholar] [CrossRef]
- Nilsson, M.G.; Gustafson, C.; Abbas, T.; Tufvesson, F. A Measurement-Based Multilink Shadowing Model for V2V Network Simulations of Highway Scenarios. IEEE Trans. Veh. Technol. 2017, 66, 8632–8643. [Google Scholar] [CrossRef]
- Tchouankem, H. Characterization of Intersection Topologies in Urban Areas for Vehicle-to-Vehicle Communication. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Kühlmorgen, S.; Gonzalez, A.; Festag, A.; Fettweis, G. Improving communication-based intersection safety by cooperative relaying with joint decoding. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 679–684. [Google Scholar] [CrossRef]
- U.S. Department of Transportation, National Highway Traffic Safety Administration. Vehicle-to-Vehicle Communications: Readiness of V2V Technology for Application; NHTSA: Washington, DC, USA, 2014.
- Bazzi, A.; Zanella, A.; Masini, B.M. A distributed virtual traffic light algorithm exploiting short range V2V communications. Ad Hoc Netw. 2016, 49, 42–57. [Google Scholar] [CrossRef]
- Zhang, R.; Schmutz, F.; Gerard, K.; Pomini, A.; Basseto, L.; Ben Hassen, S.; Ishikawa, A.; Ozgunes, I.; Tonguz, O. Virtual Traffic Lights: System Design and Implementation. ArXiv, 2018; arXiv:cs.NI/1807.01633. [Google Scholar]
- Zhiyi, H.; Wei, C.; Wei, Z.; Patzold, M.; Chelli, A. Modelling of MIMO vehicle-to-vehicle fading channels in T-junction scattering environments. In Proceedings of the 2009 3rd European Conference on Antennas and Propagation, Berlin, Germany, 23–27 March 2009; pp. 652–656. [Google Scholar]
- Karedal, J.; Tufvesson, F.; Abbas, T.; Klemp, O.; Paier, A.; Bernado, L.; Molisch, A.F. Radio Channel Measurements at Street Intersections for Vehicle-to-Vehicle Safety Applications. In Proceedings of the 2010 IEEE 71st Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Abbas, T.; Karedal, J.; Tufvesson, F.; Paier, A.; Bernado, L.; Molisch, A. Directional Analysis of Vehicle-to-Vehicle Propagation Channels. In Proceedings of the 73rd IEEE Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 15–18 May 2011; pp. 1–5. [Google Scholar]
- Mangel, T.; Klemp, O.; Hartenstein, H. 5.9 GHz inter-vehicle communication at intersections: A validated non-line-of-sight path-loss and fading model. EURASIP J. Wirel. Commun. Netw. 2011, 2011, 182. [Google Scholar] [CrossRef]
- Roivainen, A.; Jayasinghe, P.; Meinilä, J.; Hovinen, V.; Latva-Aho, M. Vehicle-to-vehicle radio channel characterization in urban environment at 2.3 GHz and 5.25 GHz. In Proceedings of the 2014 IEEE 25th Annual International Symposium on Personal, Indoor, and Mobile Radio Communication (PIMRC), Washington, DC, USA, 2–5 September 2014; pp. 63–67. [Google Scholar] [CrossRef]
- Granda, F.; Azpilicueta, L.; Vargas-Rosales, C.; Lopez-Iturri, P.; Aguirre, E.; Astrain, J.J.; Falcone, F. Spatial Characterization of Radio Propagation Channel in Urban Vehicle-to-Infrastructure Environments to Support WSNs Deployment. Sensors 2017, 17, 1313. [Google Scholar] [CrossRef]
- Hadiwardoyo, S.A.; Tomás, A.; Hernández-Orallo, E.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Empirical Study and Modeling of Vehicular Communications at Intersections in the 5 GHz Band. Mob. Inf. Syst. 2017, 2017, 2861827. [Google Scholar] [CrossRef]
- Abbas, T.; Thiel, A.; Zemen, T.; Mecklenbräuker, C.; Tufvesson, F. Validation of a non-line-of-sight path-loss model for V2V communications at street intersections. In Proceedings of the 2013 13th International Conference on ITS Telecommunications (ITST), Tampere, Finland, 5–7 November 2013; pp. 198–203. [Google Scholar] [CrossRef]
- Mir, Z.H.; Filali, F. Simulation and Performance Evaluation of Vehicle-to-Vehicle (V2V) Propagation Model in Urban Environment. In Proceedings of the 2016 7th International Conference on Intelligent Systems, Modelling and Simulation (ISMS), Bangkok, Thailand, 25–27 January 2016; pp. 394–399. [Google Scholar] [CrossRef]
- Eichberger, A.; Markovic, G.; Magosi, Z.; Rogic, B.; Lex, C.; Samiee, S. A Car2X sensor model for virtual development of automated driving. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef]
- Abbas, T.; Nuckelt, J.; Kürner, T.; Zemen, T.; Mecklenbräuker, C.; Tufvesson, F. Simulation and Measurement-Based Vehicle-to-Vehicle Channel Characterization: Accuracy and Constraint Analysis. IEEE Trans. Antennas Propag. 2015, 63, 3208–3218. [Google Scholar] [CrossRef]
- Sommer, C.; Eckhoff, D.; German, R.; Dressler, F. A computationally inexpensive empirical model of IEEE 802.11p radio shadowing in urban environments. In Proceedings of the 2011 Eighth International Conference on Wireless On-Demand Network Systems and Services, Bardonecchia, Italy, 26–28 January 2011; pp. 84–90. [Google Scholar] [CrossRef]
- METIS. METIS Channel Models–Deliverable D1.4. METIS Project, Europe. 2015. Available online: https://www.metis2020.com/wp-content/uploads/METIS_D1.4_v3.pdf (accessed on 25 January 2018).
- IEEE Standard for Information Technology—Telecommunications and Information Exchange Between Systems—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE Std 802.11-2012; IEEE: Piscataway, NJ, USA, 2012. [CrossRef]
- ECC Decision of 14 March 2008 on the Harmonised Use of the 5875-5925 Mhz Frequency Band for ECC/DEC/(08)01 Amended 3 July 2015. Available online: https://www.ecodocdb.dk/download/b470d271-048b/ECCDEC0801.PDF (accessed on 25 January 2018).
- Nilsson, M.G.; Vlastaras, D.; Abbas, T.; Bergqvist, B.; Tufvesson, F. On multilink shadowing effects in measured V2V channels on highway. In Proceedings of the 9th European Conference on Antennas and Propagation (EuCAP), Lisbon, Portugal, 12–17 April 2015. [Google Scholar]
- Gustafson, C.; Abbas, T.; Bolin, D.; Tufvesson, F. Statistical Modeling and Estimation of Censored Pathloss Data. IEEE Wirel. Commun. Lett. 2015, 4, 569–572. [Google Scholar] [CrossRef]
- Gustafson, C.; Abbas, T.; Bolin, D.; Tufvesson, F. Tobit Maximum-Likelihood Estimation of Censored Pathloss Data; Technical Report; Lund University: Lund, Sweden, 2015. [Google Scholar]
- Intelligent Transport Systems (ITS). Access Layer Specification for Intelligent Transport Systems Operating in the 5 GHz Frequency Band; ETSI EN 302 663 V1.2.1; ETSI: Sophia Antipolis, France, 2013. [Google Scholar]
- Wikipedia: Braking-distance. Available online: https://en.wikipedia.org/wiki/Braking-distance (accessed on 25 January 2018).
- Vehicle Regulations: Distances (Reaction, Braking, Stopping). Available online: https://korkortonline.se/en/theory/reaction-braking-stopping/ (accessed on 16 January 2018).
- Gudmundson, M. Correlation model for shadow fading in mobile radio systems. Electron. Lett. 1991, 27, 2145–2146. [Google Scholar] [CrossRef]
- Abbas, T.; Sjöberg, K.; Karedal, J.; Tufvesson, F. A Measurement Based Shadow Fading Model for Vehicle-to-Vehicle Network Simulations. Int. J. Antennas Propag. 2015, 2015, 190607. [Google Scholar] [CrossRef]
- Szyszkowicz, S.S.; Yanikomeroglu, H.; Thompson, J.S. On the Feasibility of Wireless Shadowing Correlation Models. IEEE Trans. Veh. Technol. 2010, 59, 4222–4236. [Google Scholar] [CrossRef]
- Oestges, C. Multi-link propagation modeling for beyond next generation wireless. In Proceedings of the 2011 Loughborough Antennas & Propagation Conference (LAPC), Loughborough, UK, 14–15 November 2011. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value(s) |
|---|---|
| Standard | IEEE 802.11p |
| Center frequency | 5.9 GHz |
| Data rate | 6 Mbit/s |
| Packet rate | 10 Hz |
| Packet size | 100, 500, and 1500 bytes every 100 ms. |
| Congestion control | Decentralized congestion control not implemented. |
| TX output power | +23 dBm, limit in [26], +23 dBm/MHz e.i.r.p |
| RX sensitivity | −97 dBm @ Packet Error Rate of 10 % |
| Polarization | Vertical |
| S60 Roof ant. (S60R) | Height 144 cm, cable loss, 2.5 dB. |
| S60 Hatrack ant. (S60H) | Height 110 cm, cable loss, 4.7 dB. |
| V60 Roof ant. (V60R) | Height 144 cm, cable loss, 5.0 dB. |
| XC90 Silver Roof ant. (XC90SR) | Height 169 cm. cable loss, 4.6 dB. |
| XC90 Black Roof ant. (XC90BR) | Height 169 cm. cable loss, 4.2 dB. |
| XC90 Black Front ant. (XC90BF) | Height 146 cm. cable loss, 1.25 dB. |
| Truck Blue Left ant. (TrkBL) | Height 301 cm. cable loss, NA. |
| Truck Blue Right ant. TrkBR) | Height 302 cm. cable loss, NA. |
| Truck Gold Left ant. (TrkGL) | Height 304 cm. cable loss, NA. |
| Truck Gold Right ant. (TrkGR) | Height 301 cm. cable loss, NA. |
| Link Type | Communication Link |
|---|---|
| Truck-to-Truck | Truck Blue Left ant. to Truck Gold Left ant. |
| Truck Blue Left ant. to Truck Gold Right ant. | |
| Truck Blue Right ant. to Truck Gold Left ant. | |
| Truck Blue Right ant. to Truck Gold Right ant. | |
| Truck-to-Car | Truck Blue Left ant. to S60 Hatrack ant. |
| Truck Blue Left ant. to S60 Roof ant. | |
| Truck Blue Right ant. to S60 Hatrack ant. | |
| Truck Blue Right ant. to S60 Roof ant. | |
| XC90 Silver Roof ant. to Truck Gold Left ant. | |
| XC90 Silver Roof ant. to Truck Gold Right ant. | |
| Car-to-Car | XC90 Silver Roof ant. to S60 Hatrack ant. |
| XC90 Silver Roof ant. to S60 Roof ant. | |
| Truck-to-Obstructed car | Truck Blue Left ant. to V60 Roof ant. |
| Truck Blue Right ant. to V60 Roof ant. | |
| XC90 Black Front ant. to Truck Gold Left ant. | |
| XC90 Black Front ant. to Truck Gold Right ant. | |
| XC90 Black Roof ant. to Truck Gold Left ant. | |
| XC90 Black Roof ant. to Truck Gold Right ant. | |
| Car-to-Obstructed car | XC90 Black Front ant. to S60 Hatrack ant. |
| XC90 Black Front ant. to S60 Roof ant. | |
| XC90 Black Front ant. to V60 Roof ant. | |
| XC90 Black Roof ant. to S60 Hatrack ant. | |
| XC90 Black Roof ant. to S60 Roof ant. | |
| XC90 Black Roof ant. to V60 Roof ant. | |
| XC90 Silver Roof ant. to V60 Roof ant. |
| Link Type | Yngve | Xerxes | ||||||
|---|---|---|---|---|---|---|---|---|
| m | m | |||||||
| [dB] | [dB] | [dB] | [dB] | |||||
| Truck-to-truck | 0.24 | 0.79 | −3.31 | 4.92 | 0.24 | 0.67 | 1.23 | 4.58 |
| Truck-to-car | 0.11 | 0.63 | 1.03 | 7.38 | 0.11 | 0.53 | 4.60 | 5.26 |
| Car-to-car | 0.12 | 0.72 | −2.47 | 4.39 | 0.12 | 0.58 | 4.18 | 4.28 |
| Truck-to-Obstructed car | 0.79 | −5.33 | 5.57 | 0 | 0.60 | 1.72 | 4.35 | |
| Car-to-Obstructed car | 0.69 | −3.61 | 5.11 | 0 | 0.49 | 5.86 | 4.75 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nilsson, M.G.; Gustafson, C.; Abbas, T.; Tufvesson, F. A Path Loss and Shadowing Model for Multilink Vehicle-to-Vehicle Channels in Urban Intersections. Sensors 2018, 18, 4433. https://doi.org/10.3390/s18124433
Nilsson MG, Gustafson C, Abbas T, Tufvesson F. A Path Loss and Shadowing Model for Multilink Vehicle-to-Vehicle Channels in Urban Intersections. Sensors. 2018; 18(12):4433. https://doi.org/10.3390/s18124433
Chicago/Turabian StyleNilsson, Mikael G., Carl Gustafson, Taimoor Abbas, and Fredrik Tufvesson. 2018. "A Path Loss and Shadowing Model for Multilink Vehicle-to-Vehicle Channels in Urban Intersections" Sensors 18, no. 12: 4433. https://doi.org/10.3390/s18124433
APA StyleNilsson, M. G., Gustafson, C., Abbas, T., & Tufvesson, F. (2018). A Path Loss and Shadowing Model for Multilink Vehicle-to-Vehicle Channels in Urban Intersections. Sensors, 18(12), 4433. https://doi.org/10.3390/s18124433