Theoretical and Experimental Analysis on the Influence of Rotor Non-Mechanical Errors of the Inductive Transducer in Active Magnetic Bearings


Abstract
:1. Intrduction
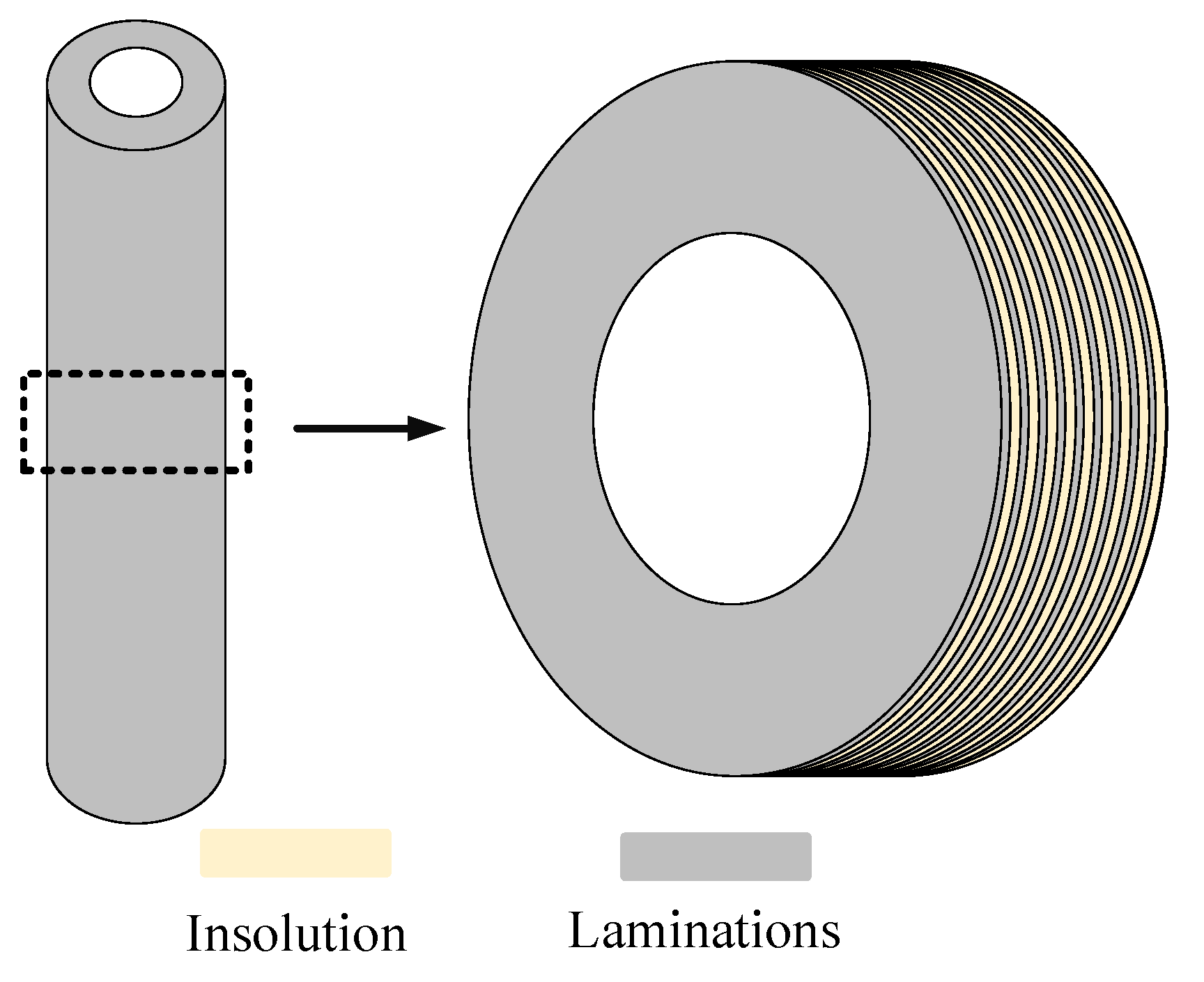
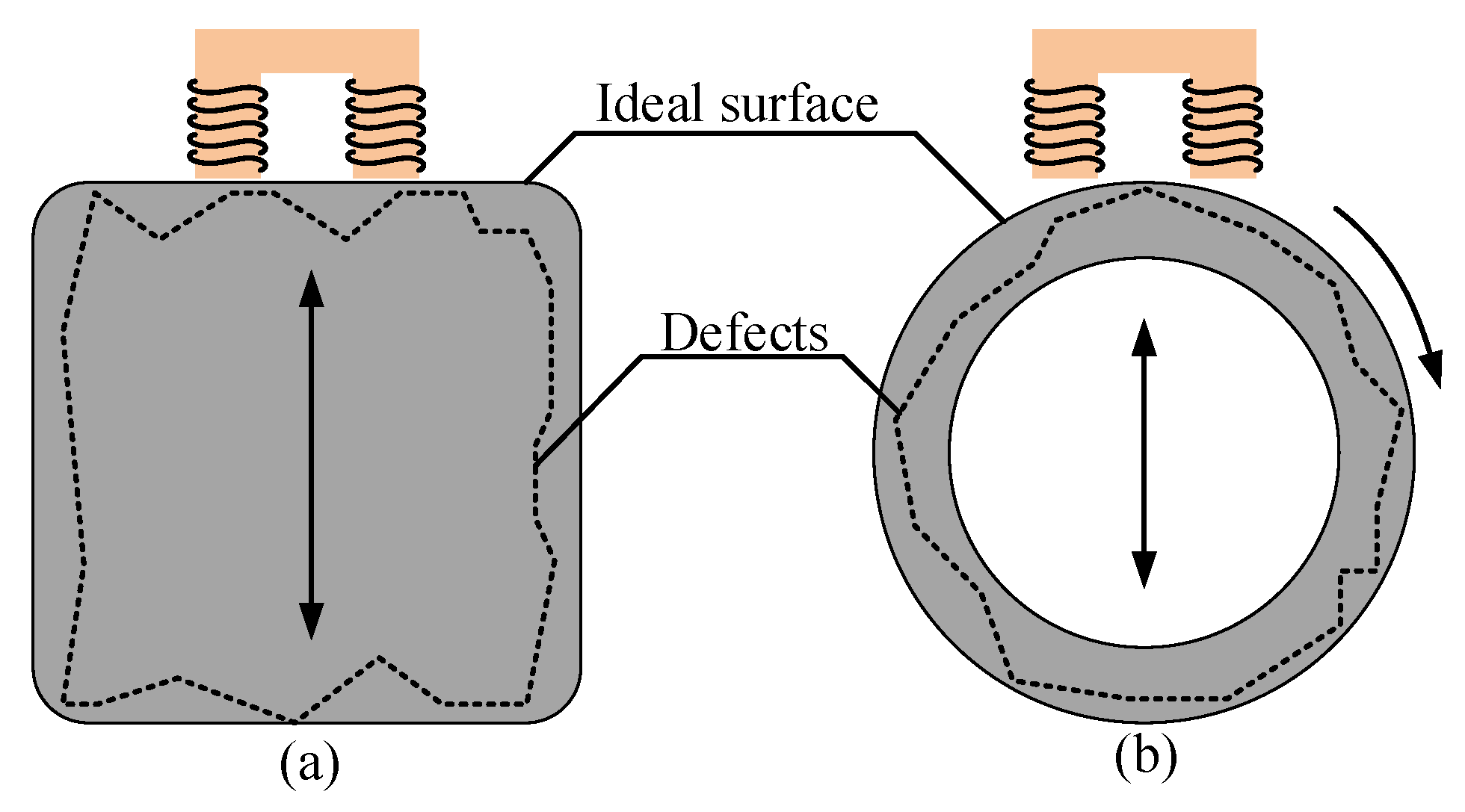
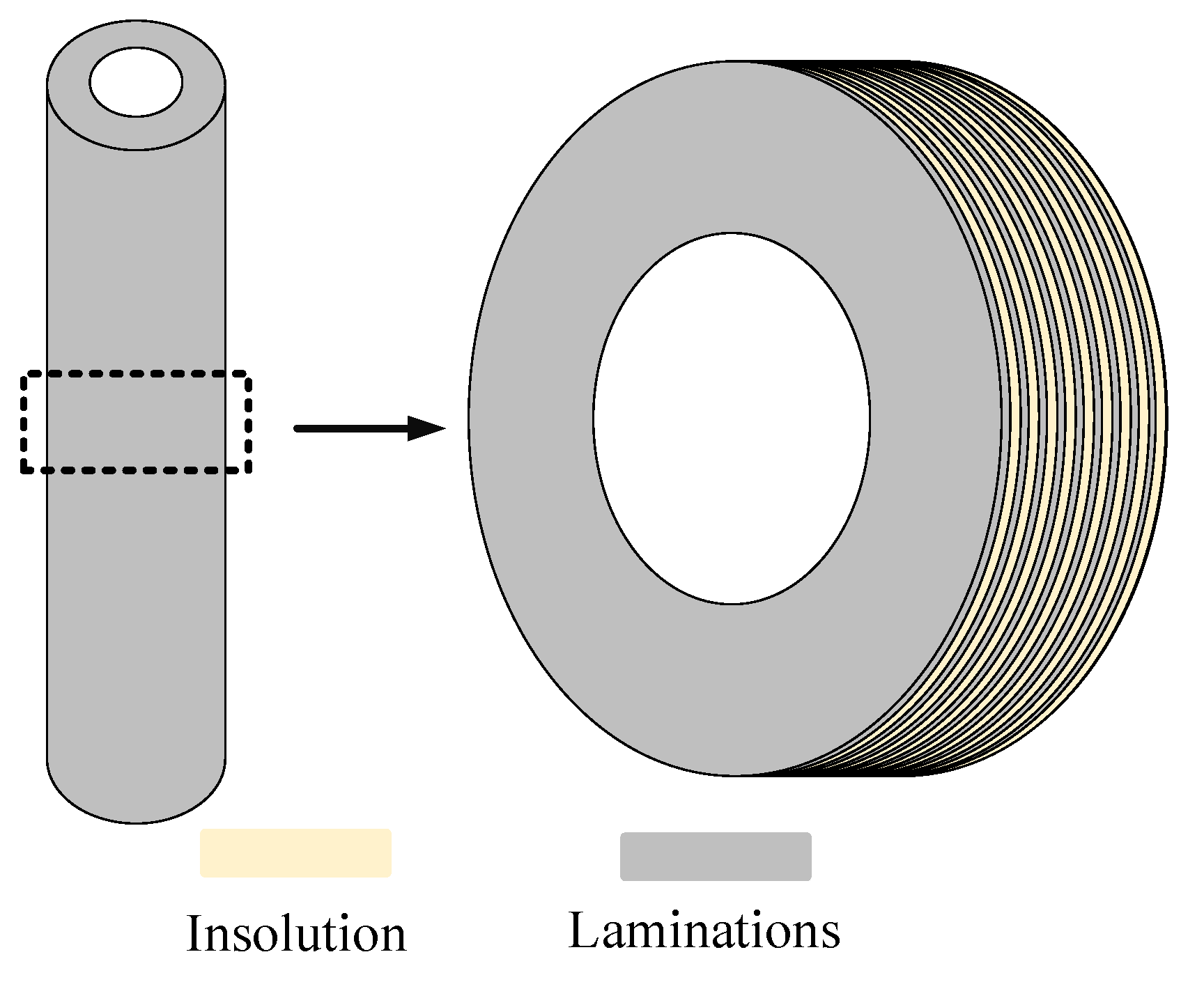
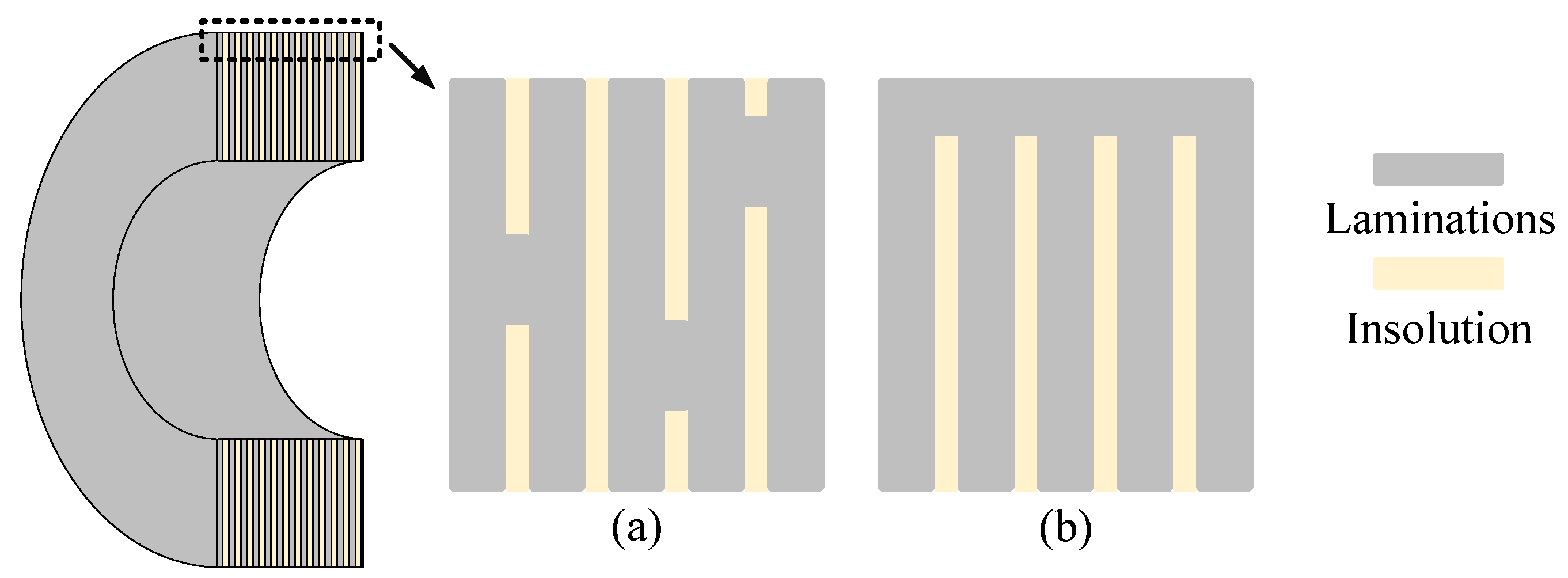
2. Anisotropic Internal Permeability of the Rotor
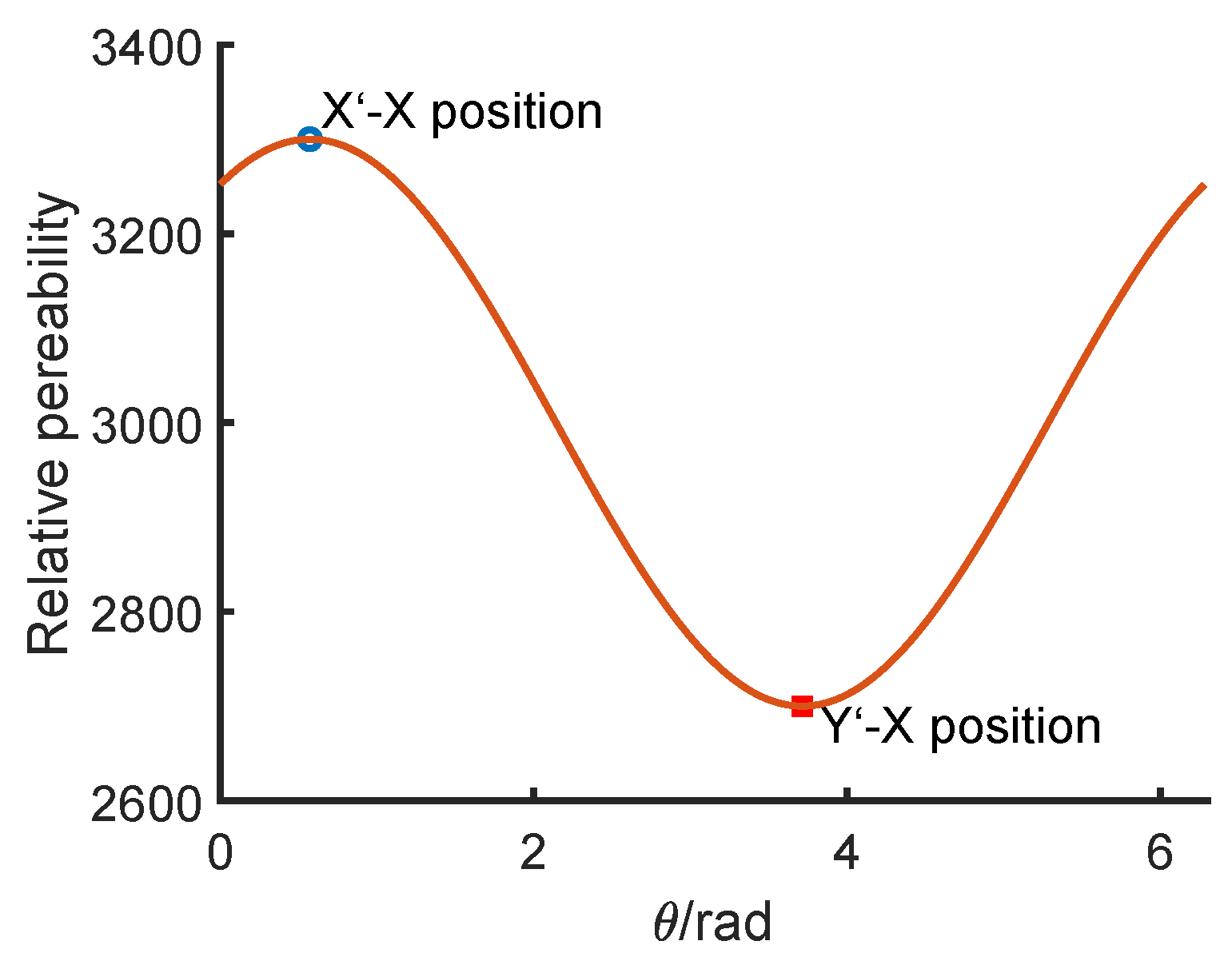
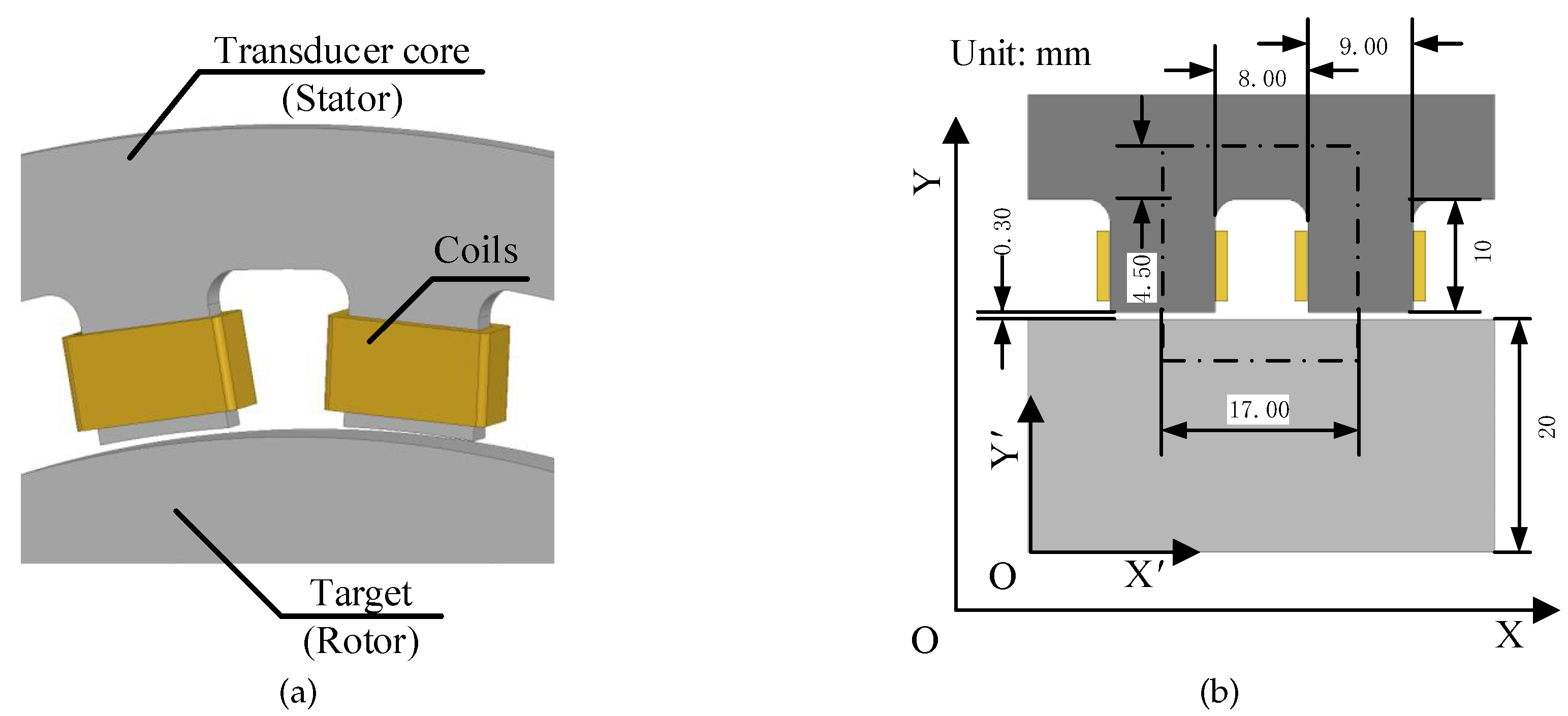
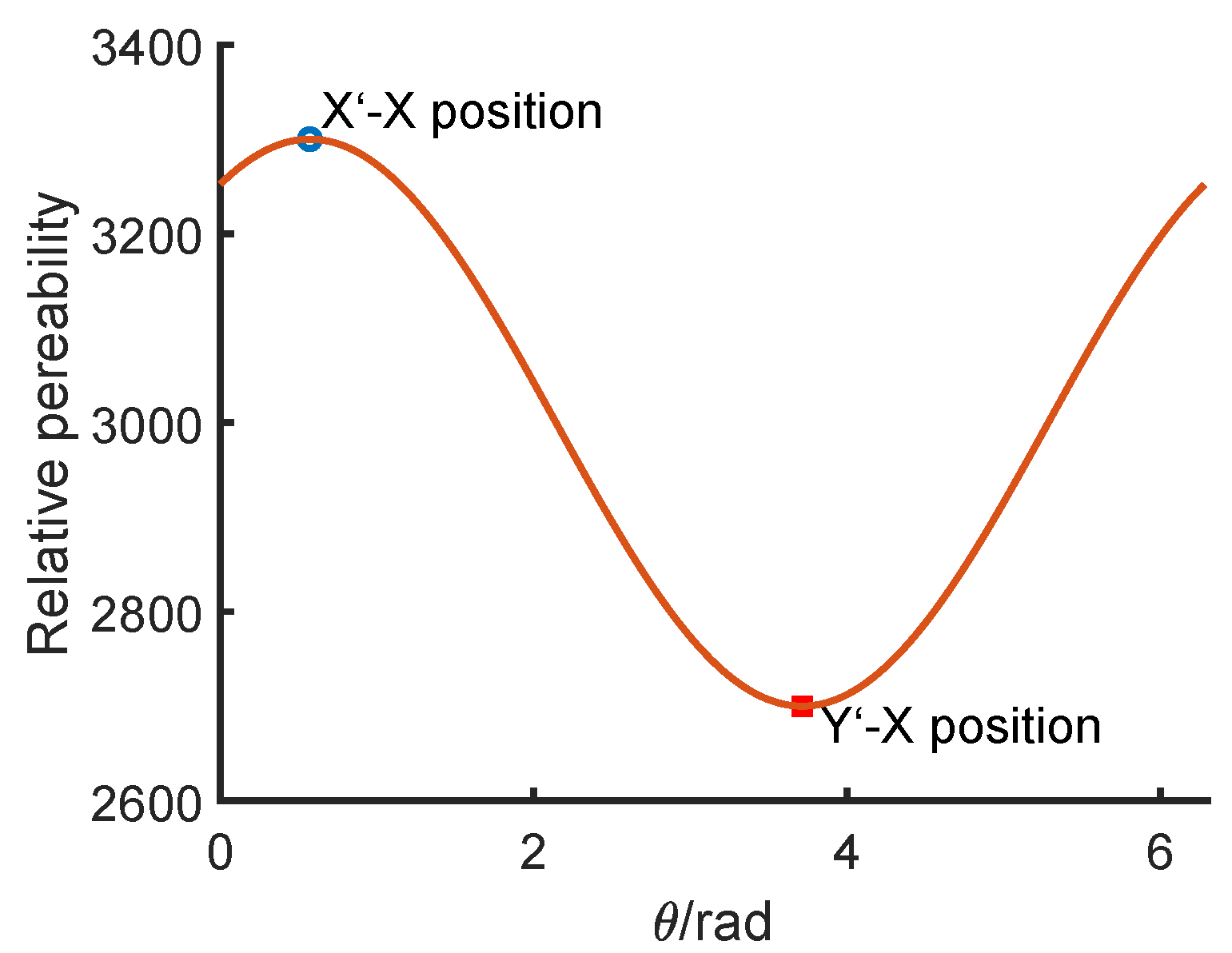
2.1. Model Establishment and Analysis
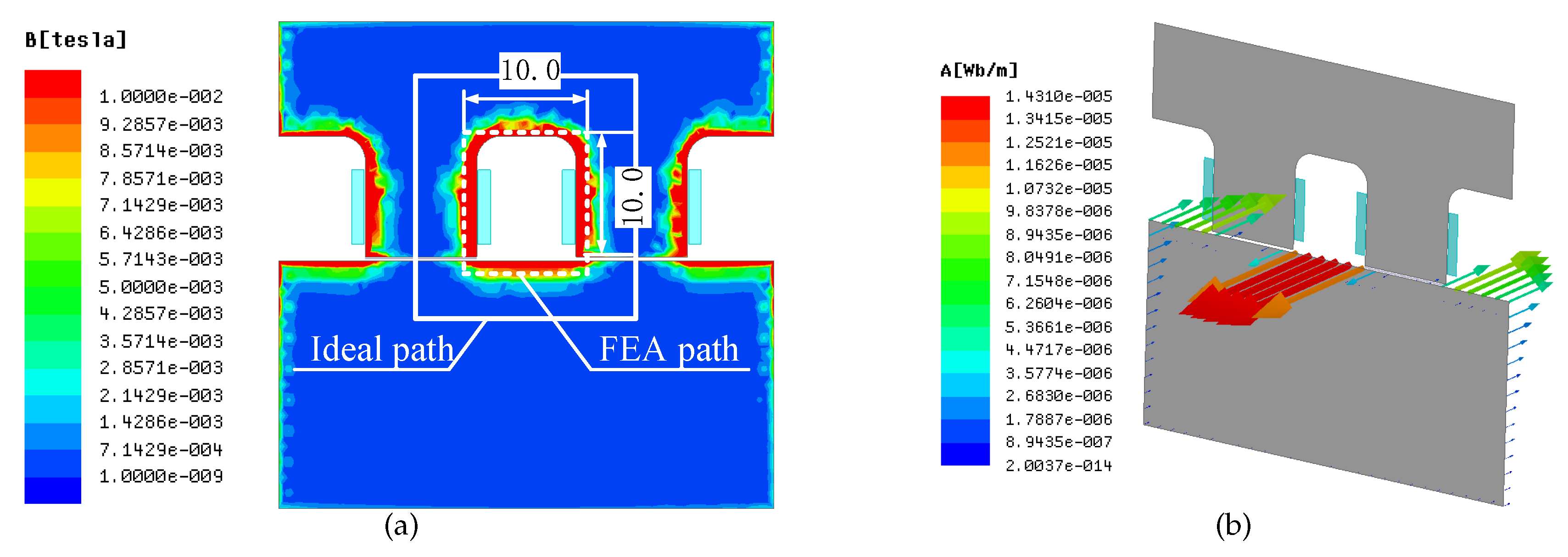
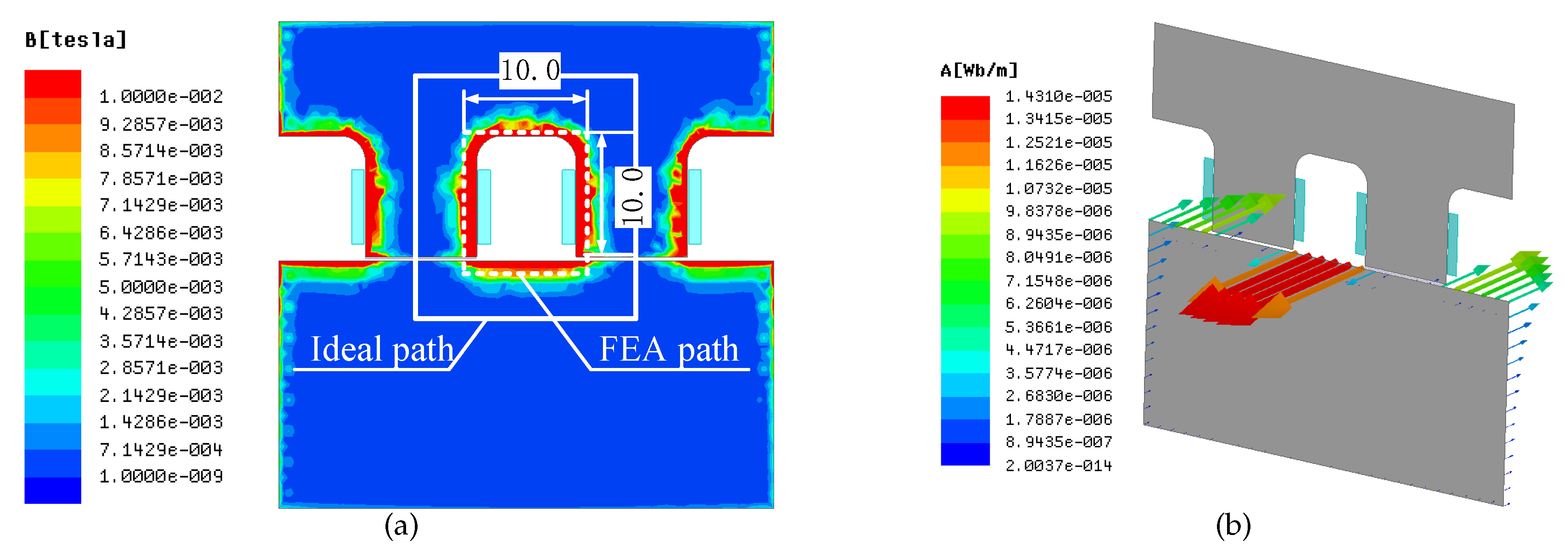
2.2. FEA for Anisotropic Internal Permeability
3. Anisotropic Surface Conductivity of the Rotor
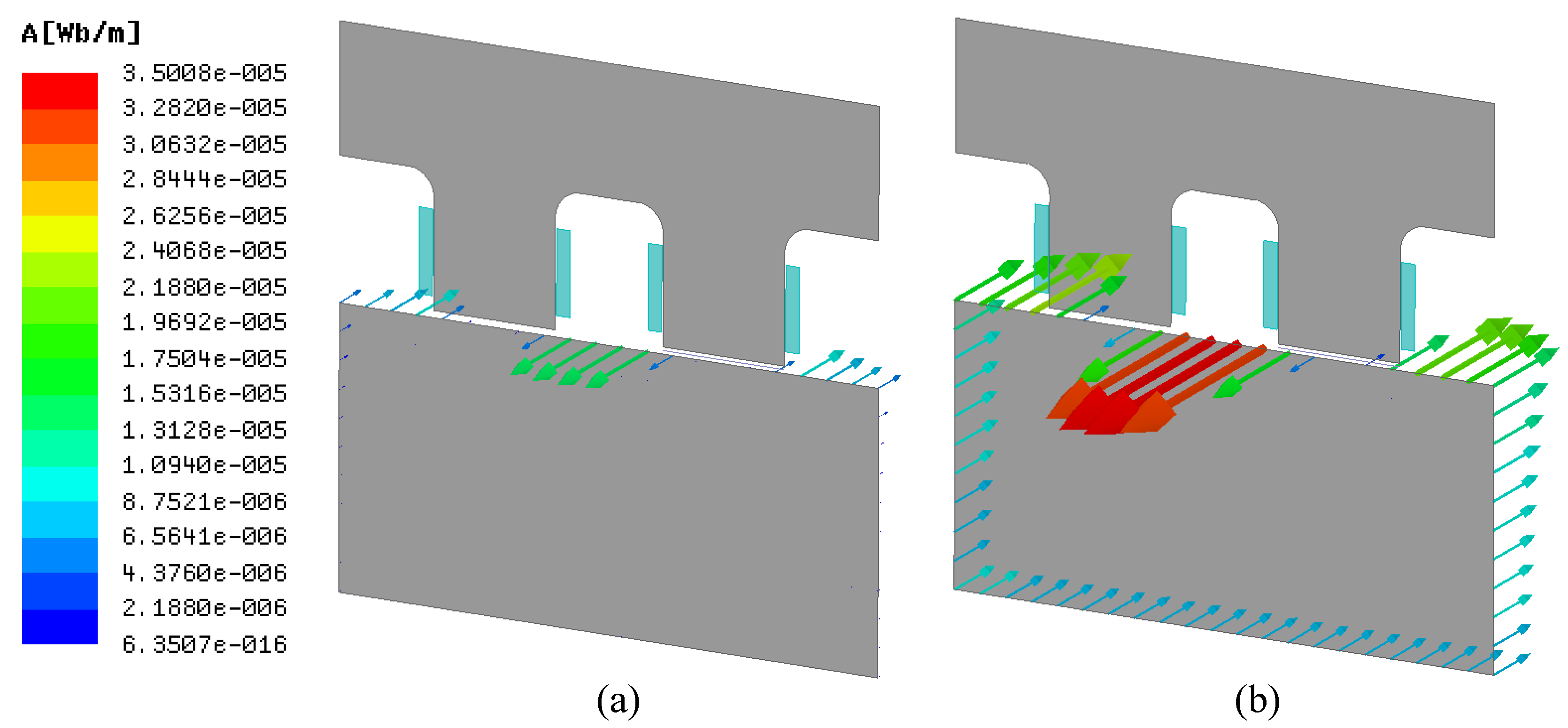
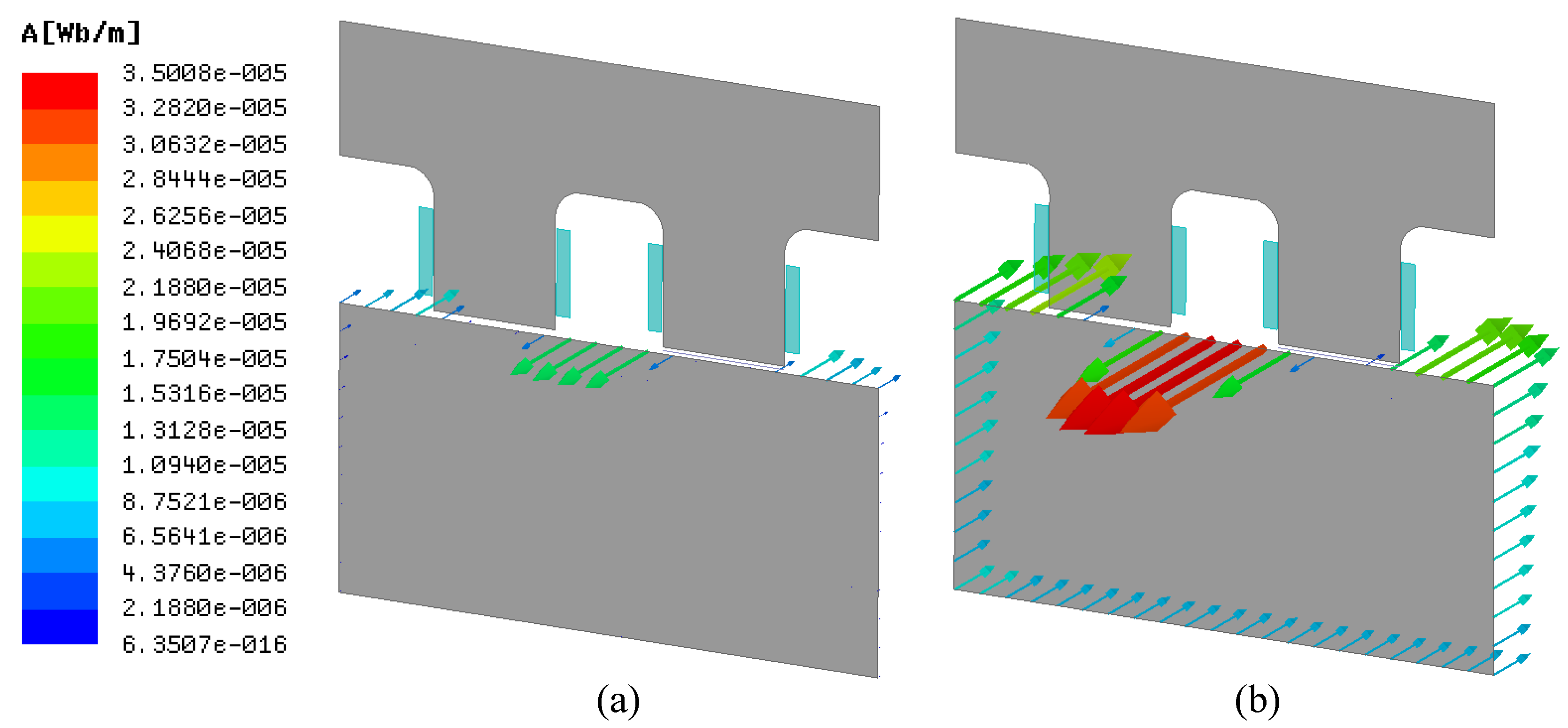
3.1. Eddy-Current Magnetic Field Analysis
3.2. FEA for Anisotropic Surface Conductivity
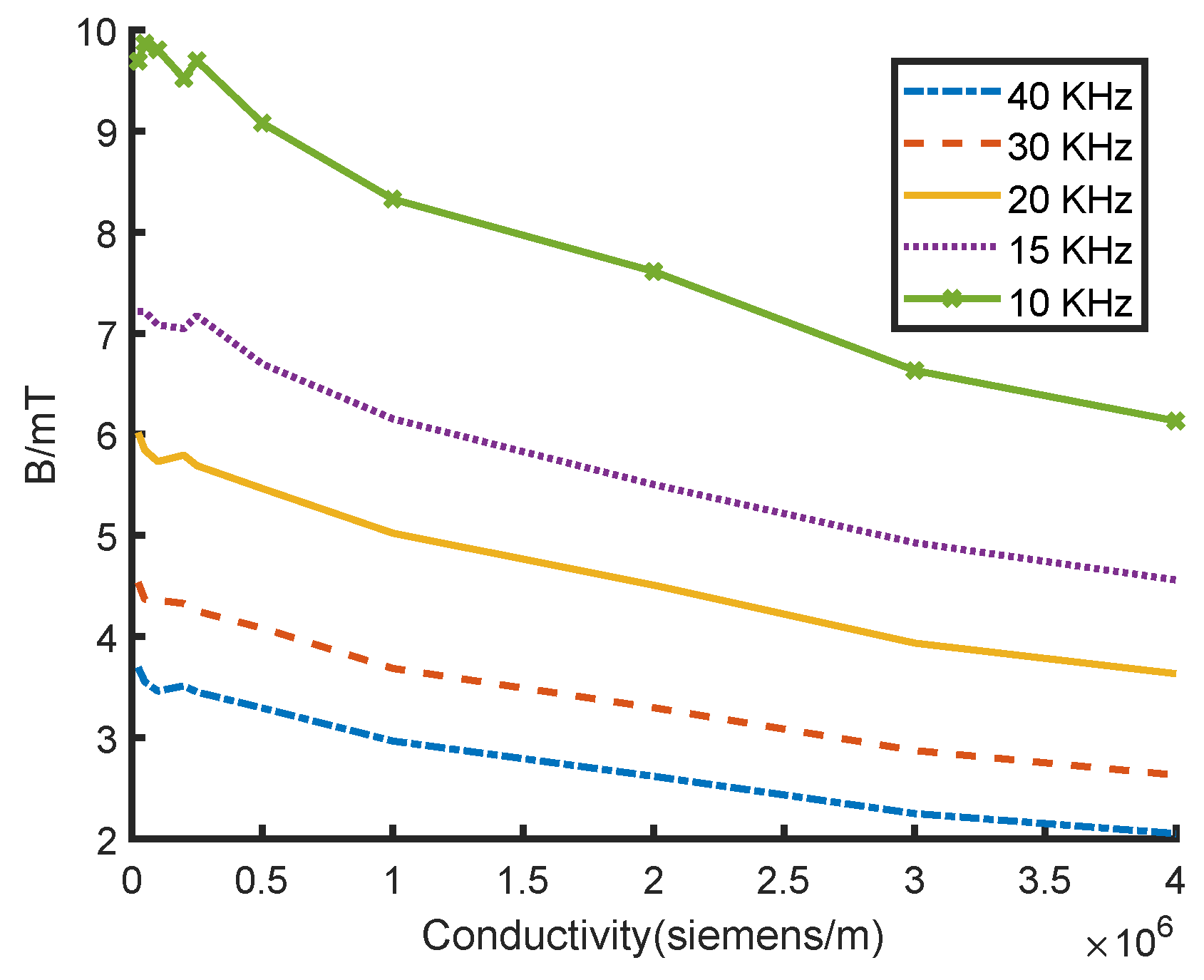
3.3. Influence of Transducer Excitation Frequency
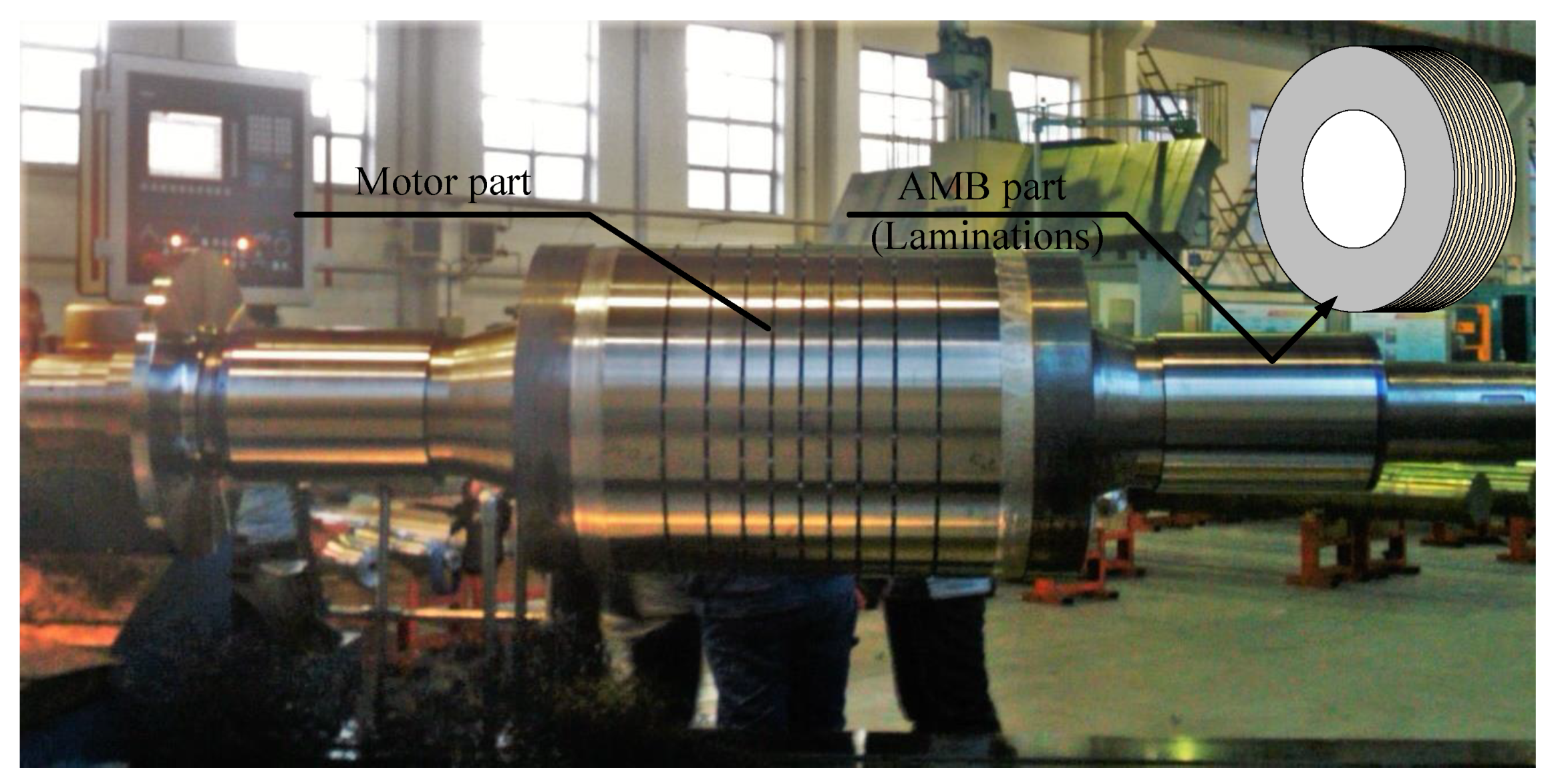
4. Transducer-Rotor Experiment
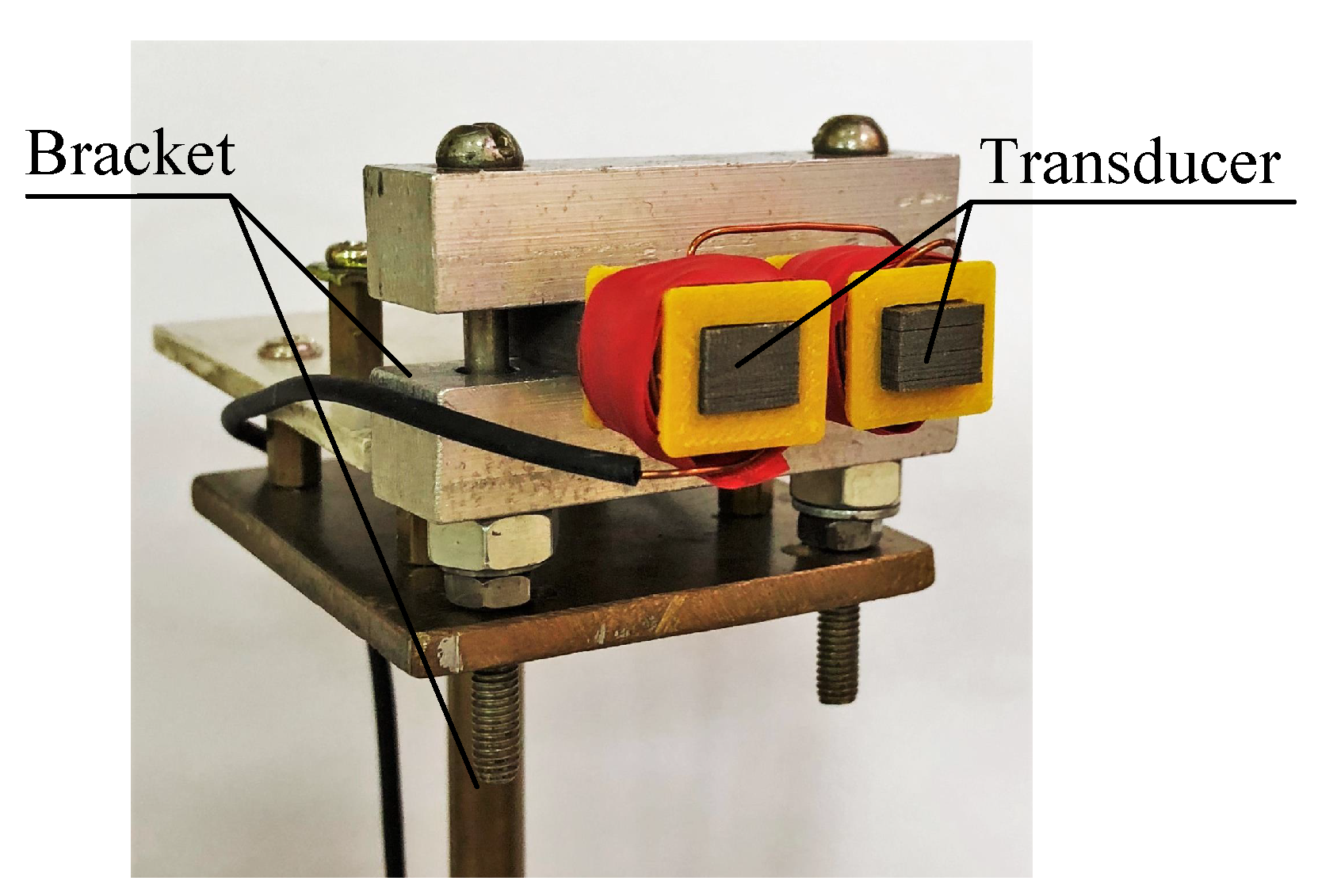
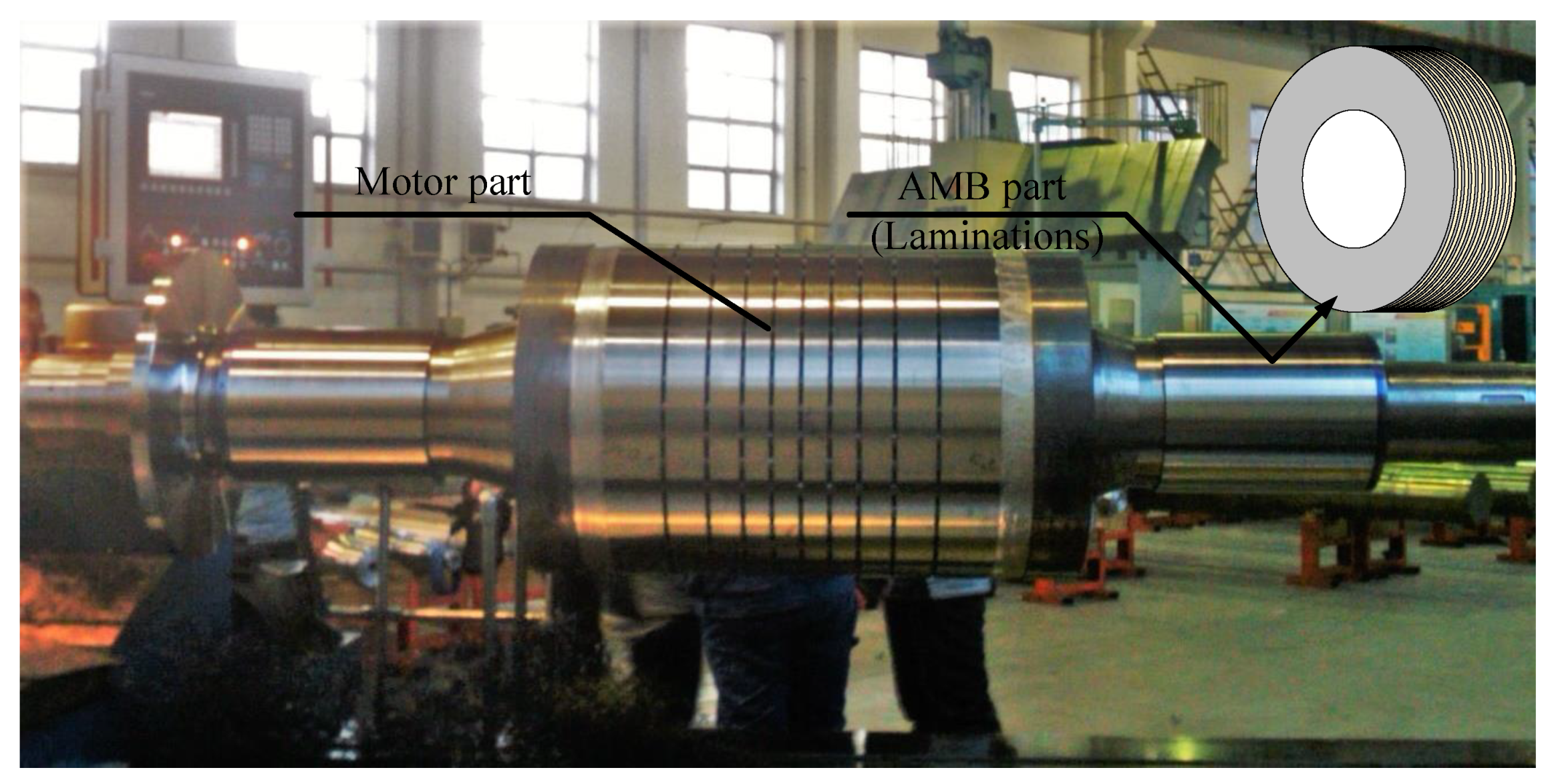
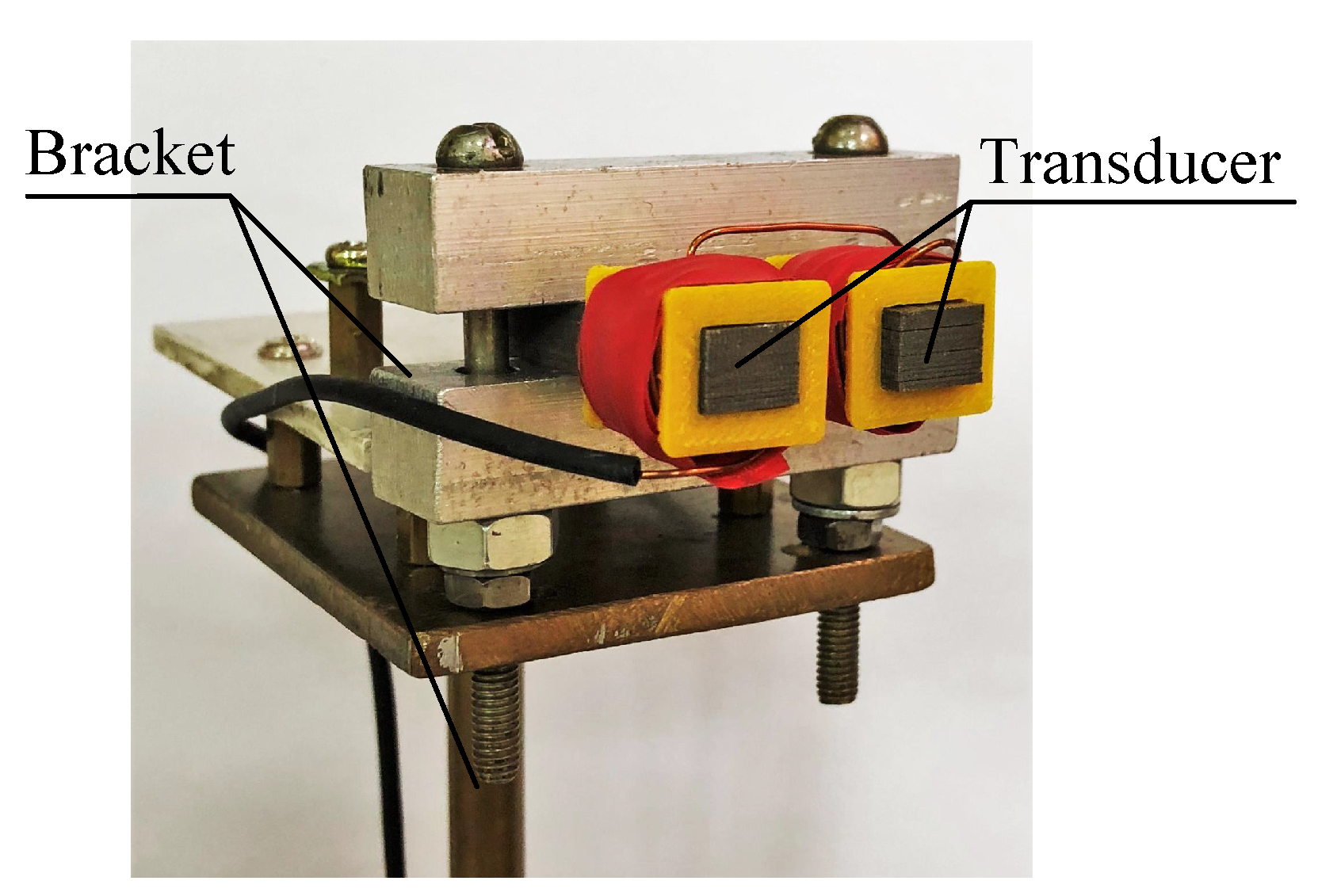
4.1. Experimental Settings
- The rotor remained on the lathe after lathing, and the transducer probe was fixed on the bracket. The radial distance between the probe and the rotor (AMB part) was (measured by micrometer), and the probe was aligned with the center of laminations. The position was recorded as a zero point (recorded as ).
- The probe was moved to the rotor by (record as ) and away from the rotor by (record as ), and the transducer output was recorded. The transducer sensitivity was calculated based on the data.
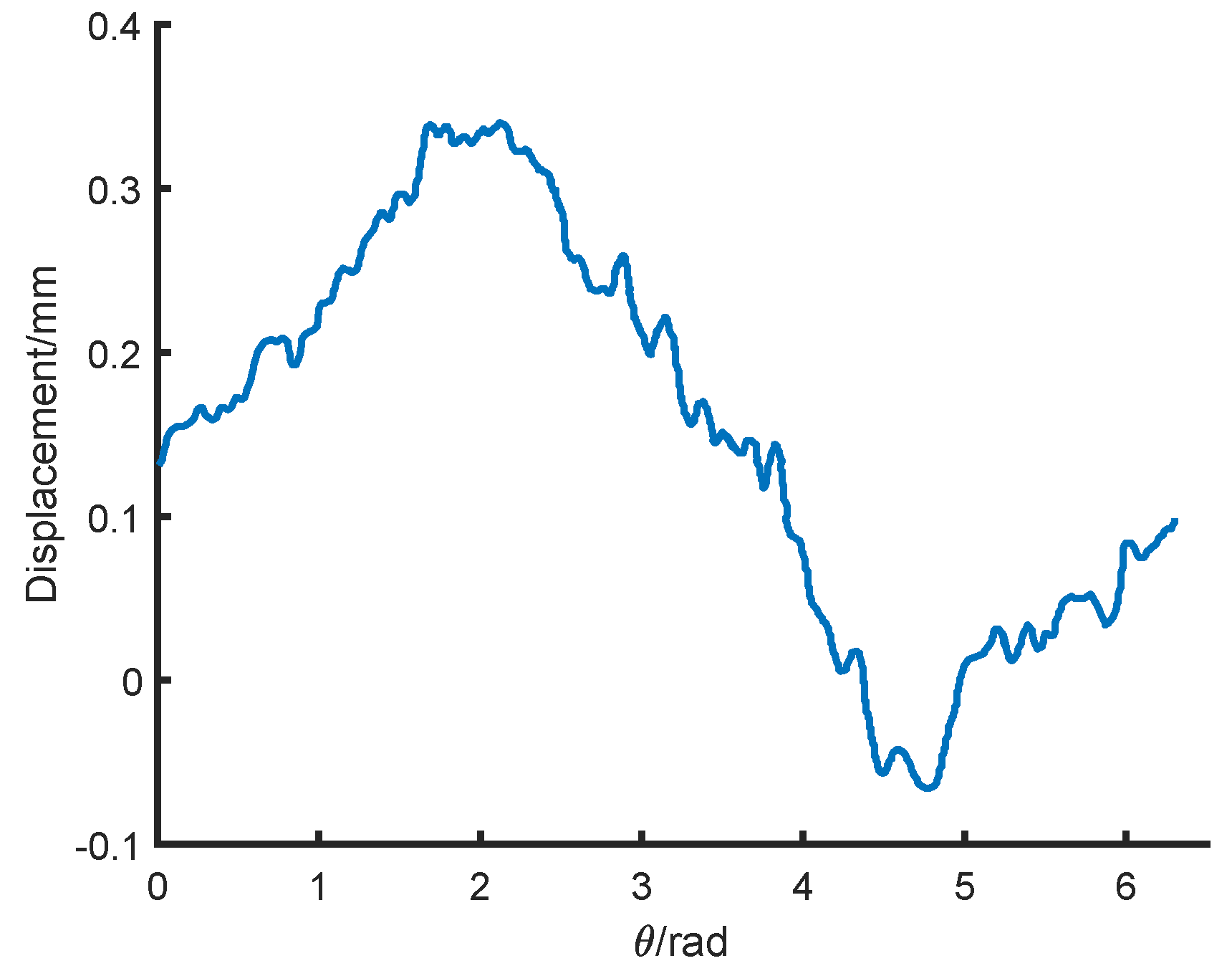
- The probe was moved back to , and the rotor was rotated to . The transducer output was recorded, and the relationship between the transducer output (displacement) and the rotor rotation angle was obtained.
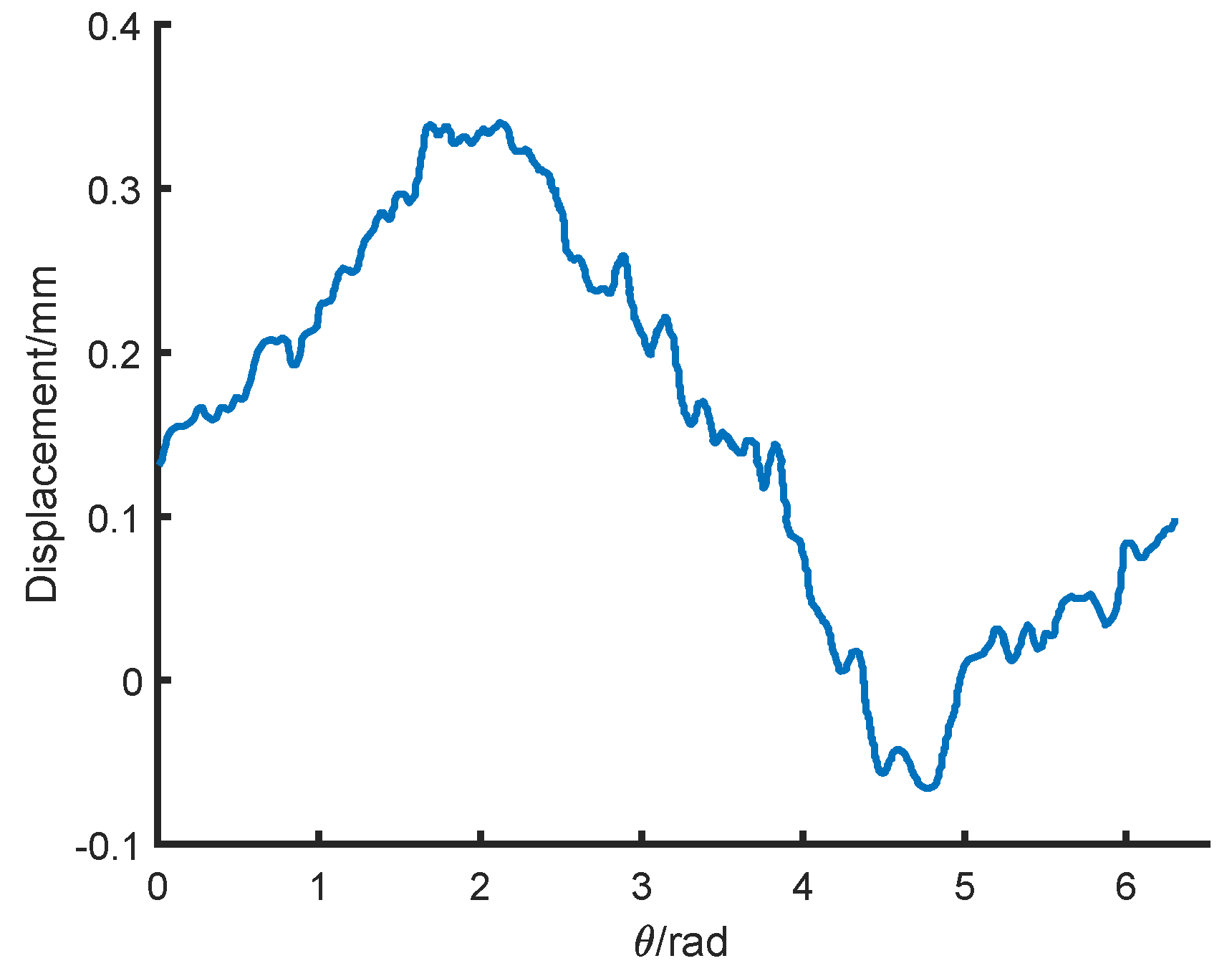
4.2. Original Results without Heating Treatment
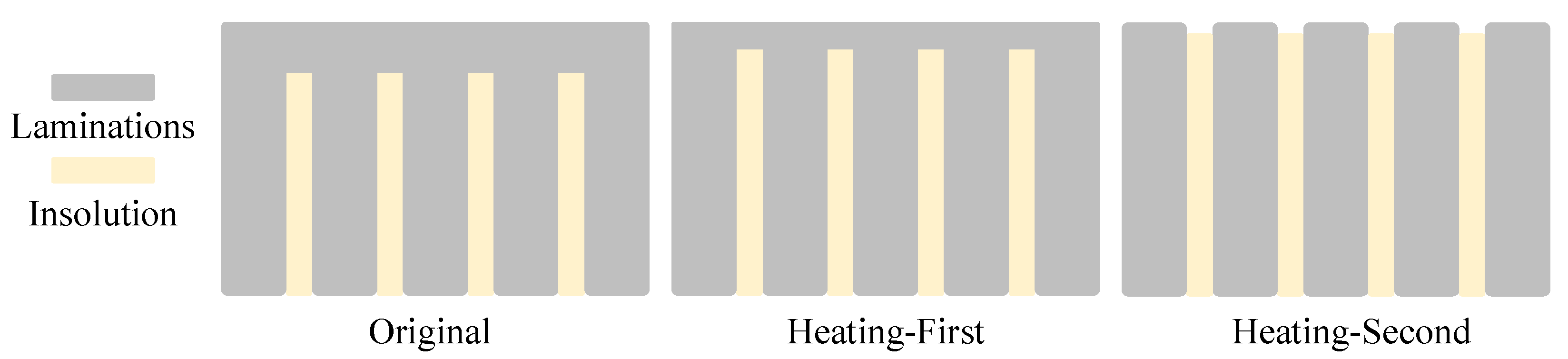
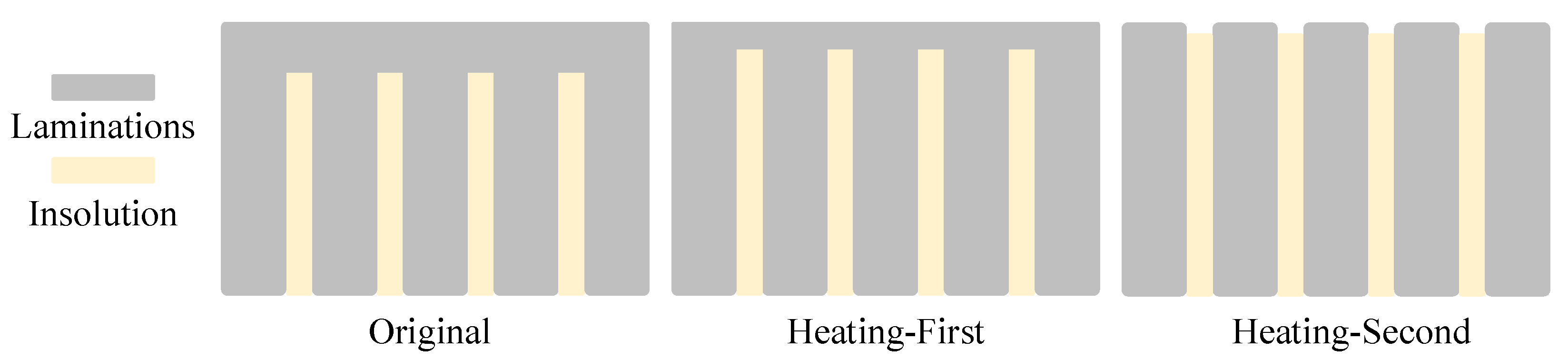
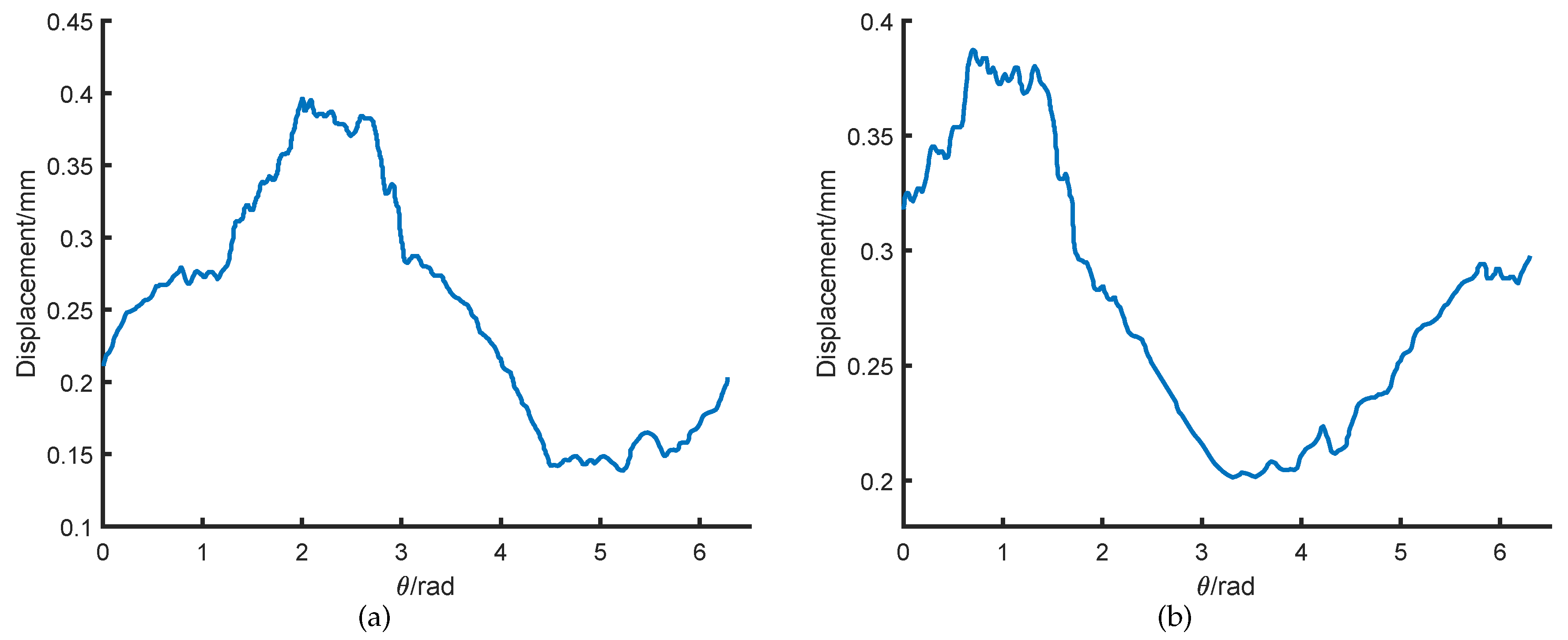
4.3. Heating Treatment Experiment
5. Solution for Rotor Non-Mechanical Errors
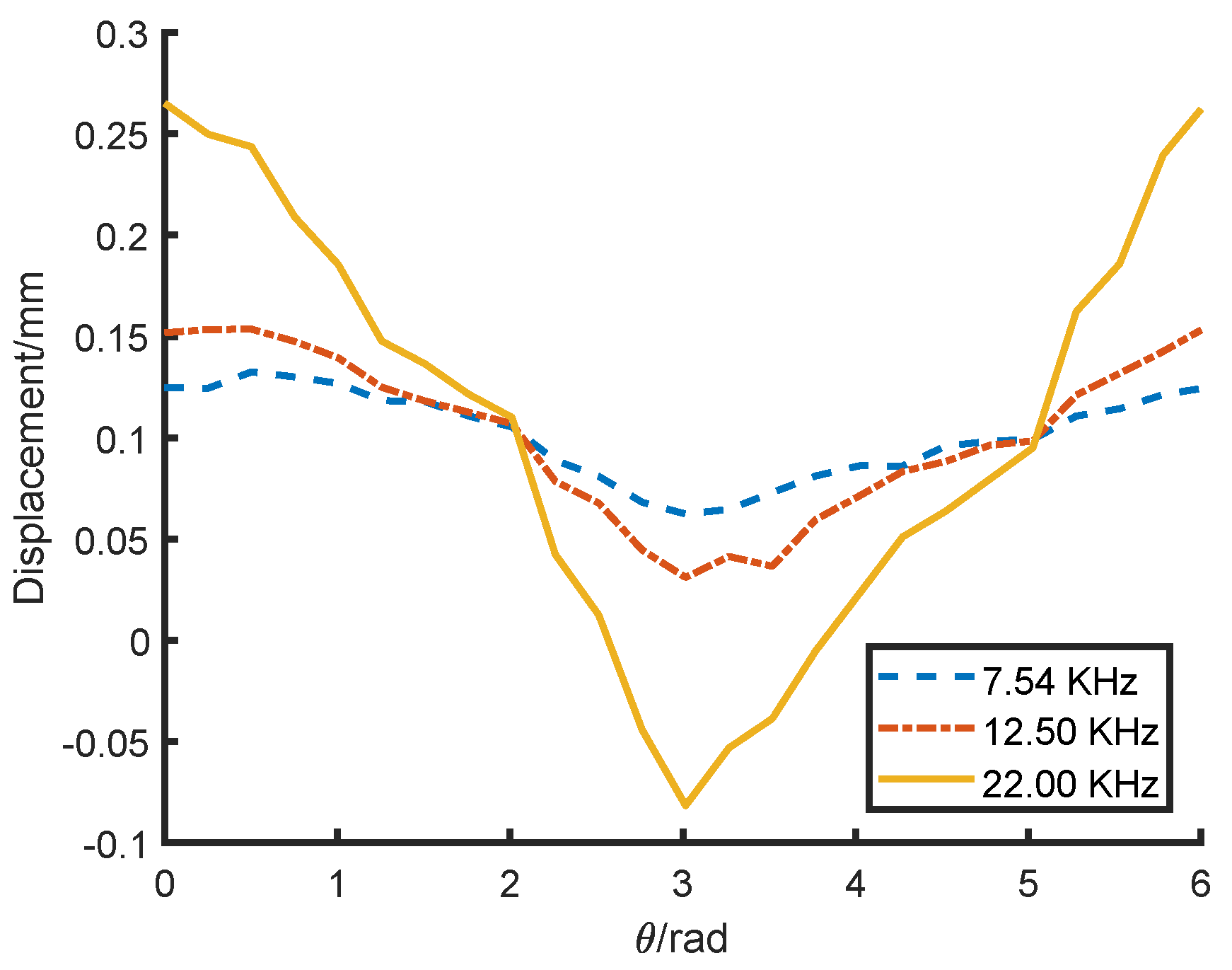
5.1. Frequency Influence on Transducer Measurement Accuracy
5.2. Improvement in the AMB Controller
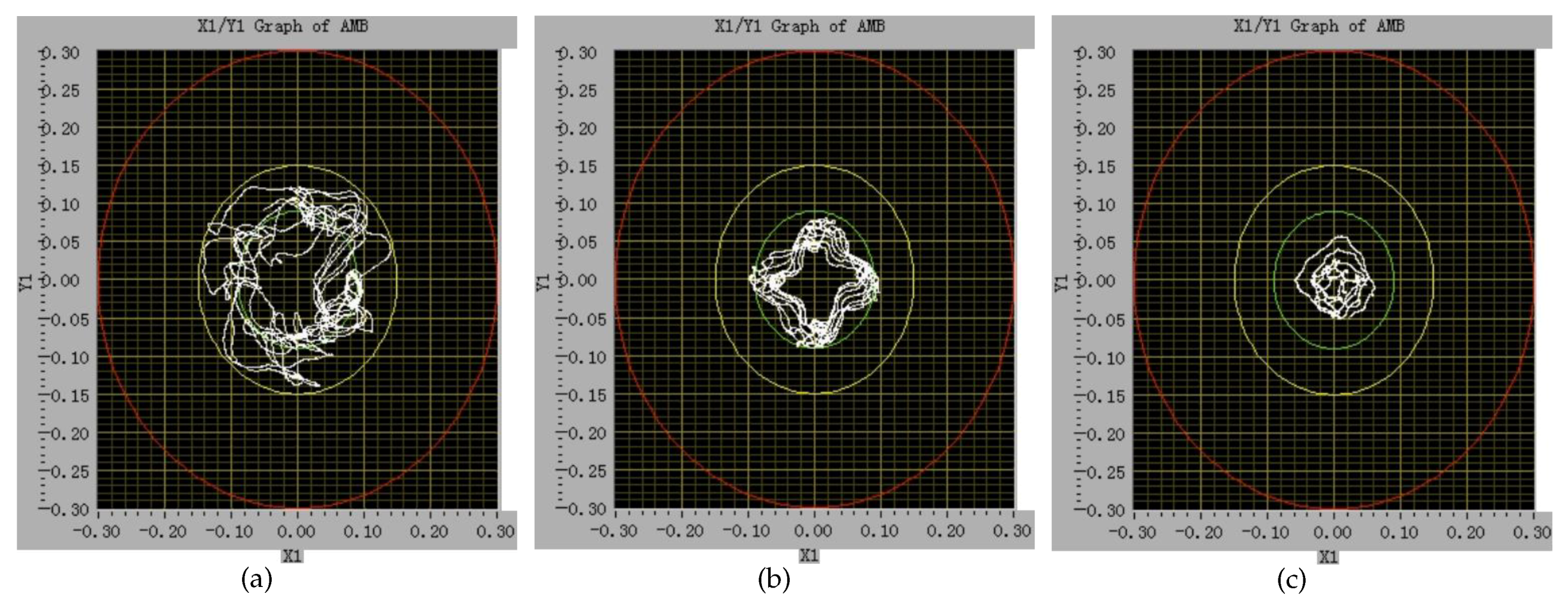
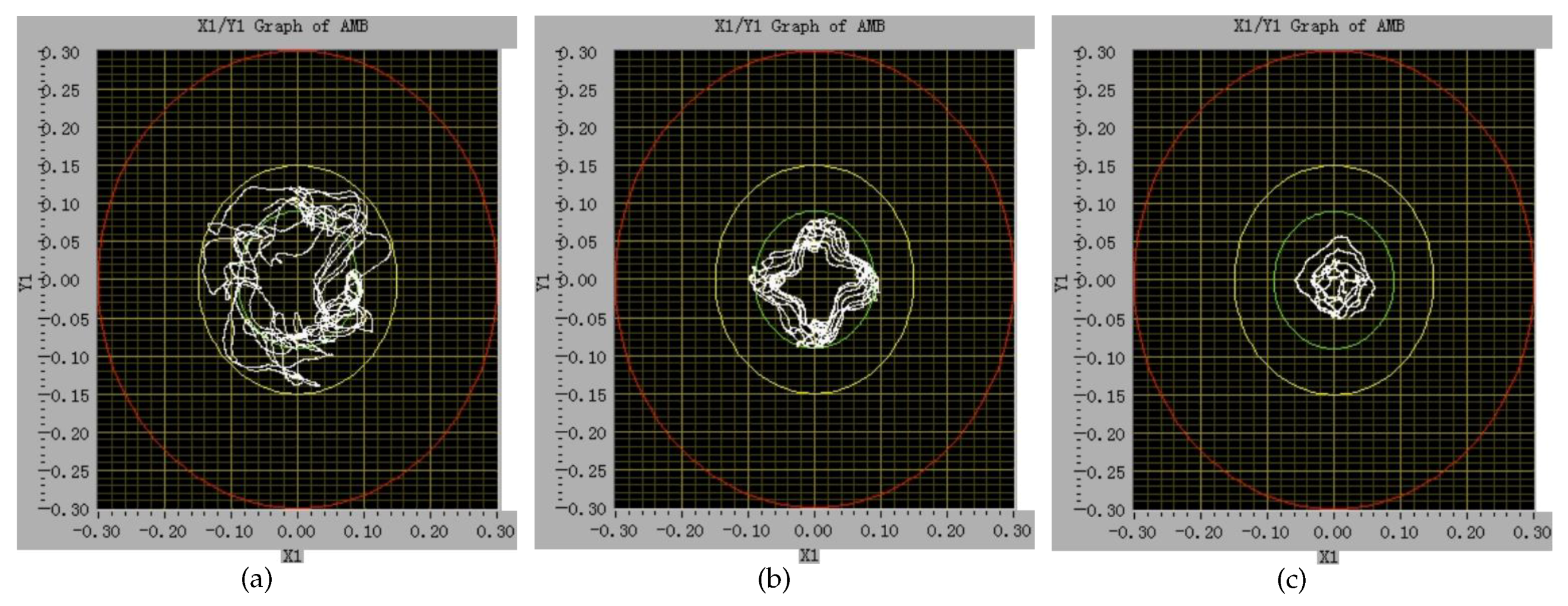
- As shown in Figure 15a, when the transducer excitation frequency is , the rotor vibrates severely at the speed of , and the rotor cannot continue to speed up.
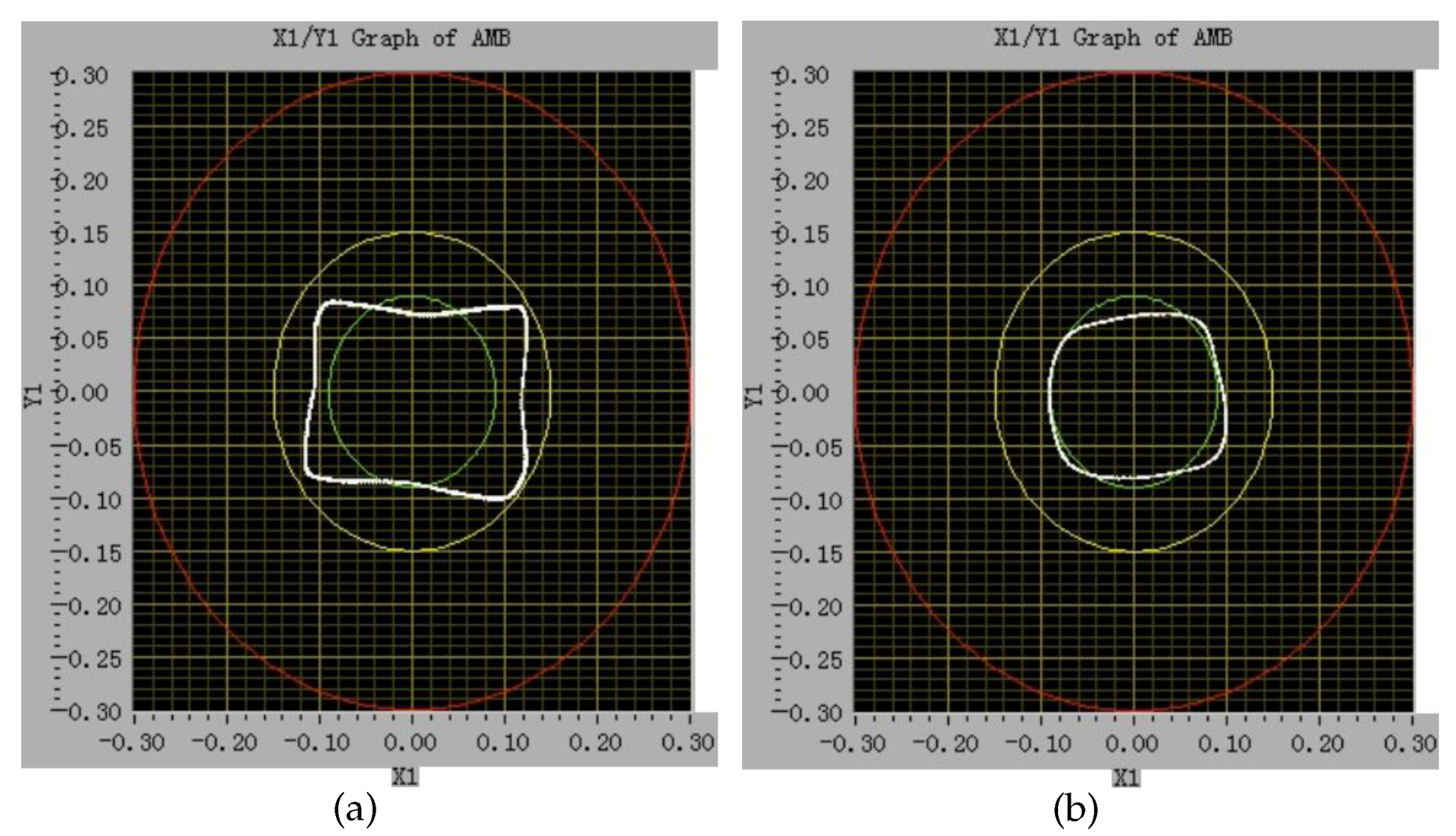
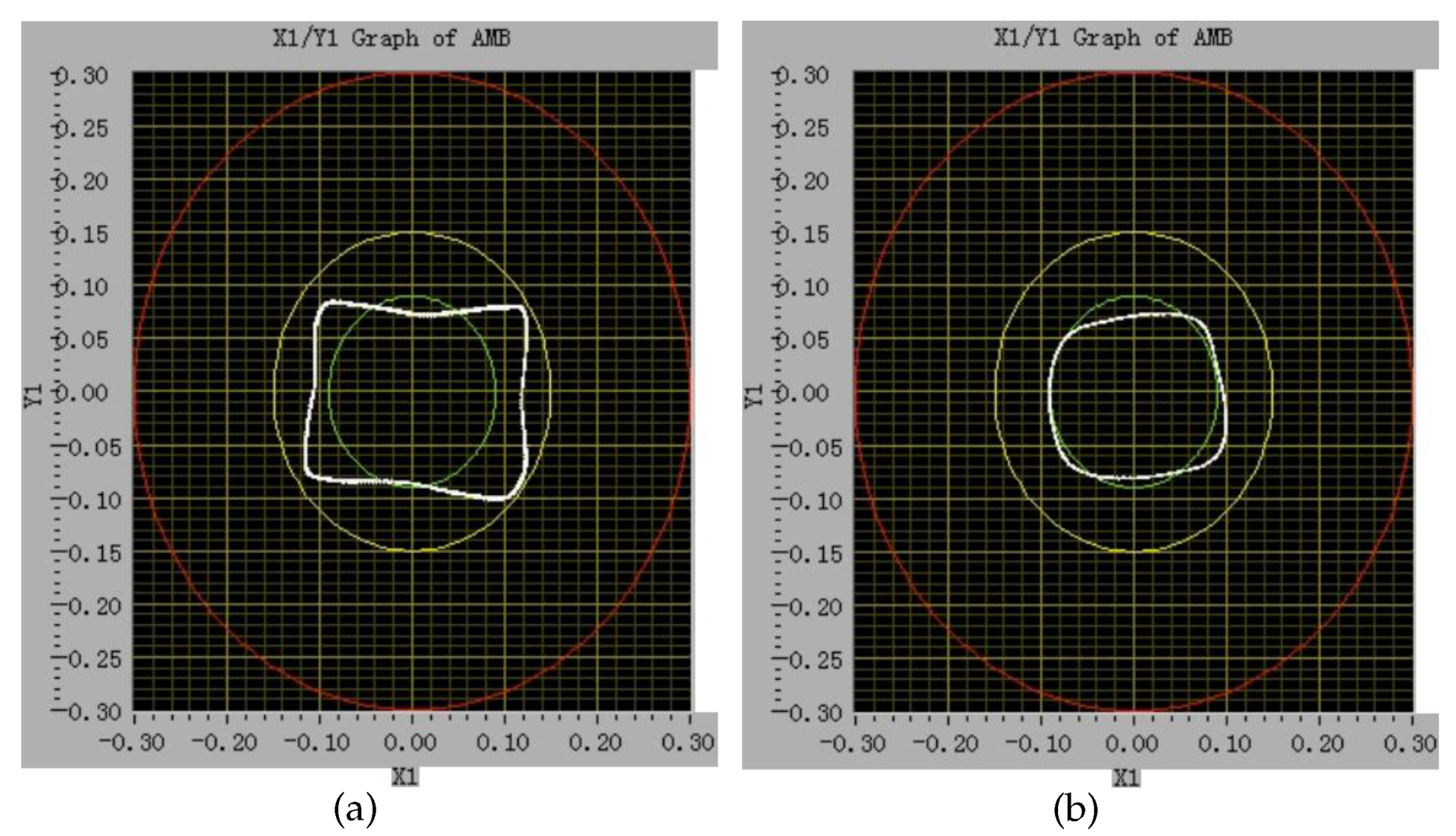
- After reducing the transducer excitation frequency to , the rotor still has a large vibration, but the vibration is significantly less than that at . The rotor can speed up to , as shown in Figure 16a.
- When the transducer excitation frequency is , the rotor vibration is significantly reduced. The rotor speed can easily rise to and has a smaller axis orbit, as shown in Figure 16b.
6. Conclusions
- The measurement error is in theoretical analysis and in FEA, which means that the anisotropic internal permeability does have an influence on the transducer measuring accuracy.
- The result in Section 3 proves that the anisotropic surface conductivity leads to different eddy currents around the rotor, influences the equivalent reluctance of the magnetic circuit, and then affects the transducer measuring accuracy.
- The transducer-rotor experiment proves that rotor non-mechanical errors have a significant influence on transducer measuring accuracy, and the maximum error can be reduced by heating the rotor from to in a one-probe transducer.
- The transducer measurement error caused by rotor non-mechanical errors is reduced significantly by decreasing the transducer excitation frequency. However, the error can only be reduced but not eliminated.
Author Contributions
Funding
Conflicts of Interest
References
- Kasarda, M.E.F. An overview of active magnetic bearing technology and applications. Shock Vib. Dig. 2000, 32, 91–99. [Google Scholar] [CrossRef]
- Imashima, T.; Hisanaga, Y.; Okubo, H.; Matsushita, O. Aseismatic vibration control on active magnetic bearing equipped flexible rotors. Trans. Jpn. Soc. Mech. Eng. Ser. C 2016, 65, 3515–3522. [Google Scholar] [CrossRef]
- Johnson, M.E.; Nascimento, L.P.; Kasarda, M.; Fuller, C.R. The effect of actuator and sensor placement on the active control of rotor unbalance. J. Vib. Acoust. 2003, 125, 365–373. [Google Scholar] [CrossRef]
- Sun, Z.; He, Y.; Zhao, J.; Shi, Z.; Zhao, L.; Yu, S. Identification of active magnetic bearing system with a flexible rotor. Mech. Syst. Signal Process. 2014, 49, 302–316. [Google Scholar] [CrossRef]
- Siva Srinivas, R.; Tiwari, R.; Kannababu, C. Application of active magnetic bearings in flexible rotordynamic systems—A state-of-the-art review. Mech. Syst. Signal Process. 2018, 106, 537–572. [Google Scholar] [CrossRef]
- Jianfeng, Z. The Influence of Anisotropic of Silicon Steel Sheet on Measurement Accuracy of Inductive Displacement Sensor; Tsinghua University: Beijing, China, 2016. (In Chinese) [Google Scholar]
- Dinulovic, D.; Gatzen, H.H. Microfabricated Inductive Micropositioning Sensor for Measurement of a Linear Movement. IEEE Sens. J. 2006, 6, 1482–1487. [Google Scholar] [CrossRef]
- FeLix, M.; LizaRraga, A.; Islas, A.; GonzaLez, A. Analysis of a ferrofluid core LVDT displacement sensor. In Proceedings of the IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 1769–1772. [Google Scholar]
- Hossain, A.; Dwyer, M.J. A new type of liquid density transducer based on the principle of linear variable differential transformer. In Proceedings of the First ISA/IEEE Sensors for Industry Conference, Rosemount, IL, USA, 5–7 November 2001; pp. 270–275. [Google Scholar]
- Bayley, A. Fail-safe LVDT position sensor for measurements in harsh environment. In Proceedings of the 7th GMM-Workshop on Energy self-sufficient Sensors, Magdeburg, Germany, 24–25 February 2014; pp. 1–3. [Google Scholar]
- Sahu, D.; Hazra, S.; Nandi, P. Modeling of Linear Variable Differential Transformer. In Proceedings of the 2016 29th International Conference on VLSI Design and 2016 15th International Conference on Embedded Systems (VLSID), Kolkata, India, 4–8 January 2016; pp. 569–570. [Google Scholar]
- Masi, A.; Danisi, A.; Losito, R.; Martino, M.; Spiezia, G. Study of magnetic interference on a LVDT prototype. In Proceedings of the 2010 IEEE Instrumentation & Measurement Technology Conference Proceedings, Austin, TX, USA, 3–6 May 2010; pp. 219–223. [Google Scholar]
- Committee of Weapon-Industry Non-destructive Testing and Personnel Technical Qualification Appraisal. Quick Manual for Common Steel Magnetic Characteristic Curve; China Machine Press: Beijing, China, 2003. (In Chinese) [Google Scholar]
- Guoping, D. Analysis and Measurement Research on Electromagnetic Field for Magnetic Bearings; Wuhan University of Technology: Wuhan, China, 2004. (In Chinese) [Google Scholar]
- Guoping, D. Related Theory and Measurement Research on Magnetic Bearing Electromagnetic Field; Wuhan University of Technology: Wuhan, China, 2004. (In Chinese) [Google Scholar]
- Wang, G.J.; Wang, P.; Wang, X.Y. Analyze of permanent magnet loss of high speed permanent magnet synchronous motor for flywheel energy storage system. In Proceedings of the 2015 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Shanghai, China, 19 April 2016; pp. 549–550. [Google Scholar]
- Griffith, J.M.; Pan, G.W. Electromagnetic fields generated by arbitrarily shaped current loops. Iet Sci. Meas. Technol. 2012, 6, 298–305. [Google Scholar] [CrossRef]
- Long, Z.; Li, C. Numerical Simulation of Air Gap Magnetic Field of Eddy-current Retarder. In Proceedings of the International Conference on Artificial Intelligence and Computational Intelligence, Sanya, China, 23–24 October 2010; pp. 209–211. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| N | 120 | S | |||
| I | 0.5 | ||||
| 17.0 | 3000 | ||||
| 46.0 | 3300 | ||||
| 0.3 | 2700 |
| X’–X | Y’–X | Difference | |
|---|---|---|---|
| 494.017 | 494.928 | ||
| 7.287 | 7.274 |
| X’–X | Y’–X | Difference | |
|---|---|---|---|
| 5.107 | 5.043 | ||
| 20.572 | 19.083 |
| X’–X | Y’–X | Difference | |
|---|---|---|---|
| FEA- | 5.107 | 5.041 | |
| Calculation- | 6.134 | 6.192 |
| State | Displacement (mm) | Transducer Output (V) | Sensitivity (mm/V) |
|---|---|---|---|
| Original | 0.00 | 0.23 | 0.110 |
| −0.40 | 3.84 | ||
| 0.40 | −3.40 |
| State | Displacement (mm) | Transducer Output (V) | Sensitivity (mm/V) |
|---|---|---|---|
| First heating treatment | 0.00 | 1.44 | 0.106 |
| −0.40 | 5.23 | ||
| 0.40 | −2.35 | ||
| Second heating treatment | 0.00 | 2.12 | 0.104 |
| −0.40 | 5.89 | ||
| 0.40 | −1.83 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Zhou, Y.; Mo, N.; Sun, Z.; Zhao, L. Theoretical and Experimental Analysis on the Influence of Rotor Non-Mechanical Errors of the Inductive Transducer in Active Magnetic Bearings. Sensors 2018, 18, 4376. https://doi.org/10.3390/s18124376
Yu J, Zhou Y, Mo N, Sun Z, Zhao L. Theoretical and Experimental Analysis on the Influence of Rotor Non-Mechanical Errors of the Inductive Transducer in Active Magnetic Bearings. Sensors. 2018; 18(12):4376. https://doi.org/10.3390/s18124376
Chicago/Turabian StyleYu, Jinpeng, Yan Zhou, Ni Mo, Zhe Sun, and Lei Zhao. 2018. "Theoretical and Experimental Analysis on the Influence of Rotor Non-Mechanical Errors of the Inductive Transducer in Active Magnetic Bearings" Sensors 18, no. 12: 4376. https://doi.org/10.3390/s18124376
APA StyleYu, J., Zhou, Y., Mo, N., Sun, Z., & Zhao, L. (2018). Theoretical and Experimental Analysis on the Influence of Rotor Non-Mechanical Errors of the Inductive Transducer in Active Magnetic Bearings. Sensors, 18(12), 4376. https://doi.org/10.3390/s18124376