1. Introduction
After decades of development, the Global Positioning System (GPS) has become the dominant positioning approach in outdoor environment for its high precision, globalization and real-time response. Advances in technology have facilitated the application of smartphones with cheap GPS receivers, providing users with access to location service in common outdoor environment. However, GPS signal may be confronted with attenuation, occlusion and multipath in scenarios such as forests and urban canyons, which often leads to serious deterioration of positioning accuracy, or even failure in positioning. To tackle the positioning problem in such complex environment, various positioning techniques have emerged, such as ultra-wideband (UWB) [
1,
2], frequency-modulated (FM) radio [
3,
4,
5,
6,
7,
8], digital television (DTV) [
9,
10,
11], radio-frequency identification (RFID) [
12], and WiFi [
13,
14,
15,
16,
17,
18]. UWB positioning systems locate users using a trilateration algorithm with the help of pre-deployed UWB transmitters. Although it may achieve high accuracy, the cost of positioning environment setup is expensive. RFID-based positioning systems determine users’ locations when they are in the vicinities of pre-deployed RFID tags. Effective read distance of RFID tag is usually limited, so it would take both time and labor to deploy many tags for the purpose of positioning in vast areas. WiFi positioning, as a popular technique in indoor positioning, is not suitable for outdoor scenarios since it requires good WiFi coverage. As for signal with lower frequency such as DTV and FM signal, mature infrastructure and strong propagation ability make them good choices for positioning in areas short of GPS signal. Thus, DTV and FM signal are employed in this paper to assist GPS signal to achieve positioning in complex environment with GPS failure.
Digital Terrestrial Multimedia Broadcasting (DTMB) is the standard for digital television broadcasting systems in China [
19]. At the headers of DTMB signal frames are pseudo-noise sequences, which act as guard intervals and basis of temporal synchronization. By frame synchronization [
20,
21,
22], we can know the signal propagation duration and the distance between user and transmitter [
23]. Reference time used by DTMB transmitters is strictly synchronized with GPS time. Thus, it is possible to locate users with the trilateration approach when signals from four or more DTMB transmitters are available [
11]. In some regions, it might be difficult to receive signals from more than three DTMB transmitters simultaneously due to transmitter planning reasons. In this case, navigation information from DTMB and GPS, like pseudo-range and pseudo-range rate, can be fused to provide more accurate user positions than either alone [
9,
24,
25]. Signal strength of DTMB signal is usually much stronger than that of GPS signal since the former is broadcasted by fixed ground stations. Thanks to its low frequency of 470–860 MHz, DTMB signal shows stronger penetration and propagation ability than many other signals with higher frequency. Its high availability can also be employed to perform fingerprint positioning [
10].
Frequency-modulated (FM) radio broadcasting has long been widely used. Its low frequency, around 100 MHz, makes it much easier to propagate in forests, urban canyons and indoor scenarios than other common signals such as GPS, WiFi and DTMB signal. The propagation model approach and the fingerprinting approach are usually employed in FM-based positioning systems. The propagation model method deduces user locations by analyzing signal characteristics measured by the user with prebuilt radio propagation model. The fingerprinting method [
26,
27,
28] is based on similarity of signal characteristics among locations, whereas the signal characteristics are referred to as “fingerprints” at corresponding locations. Fingerprint positioning is generally divided into two stages: the offline stage and the online stage. In the offline stage, site survey is conducted to collect fingerprint data at reference points (RPs) and create fingerprint database. In the online stage, fingerprint data at test points (TPs) are compared with the database using feature matching methods to estimate users’ positions. The two approaches can also be integrated together to achieve better accuracy [
8].
The principle of DTMB positioning in our method is similar to that of GPS, thus it is not difficult for us to aid GPS with DTMB. However, line-of-sight (LOS) propagation of GPS/DTMB signal is required for good precision. On the other hand, FM fingerprint positioning system can work in environment with little LOS signal. Even though the positioning accuracy of FM fingerprinting is not as competitive as that of GPS, it can be improved if GPS is used to constrain the range of RPs. Therefore, we integrate GPS, DTMB and FM signal and adaptively select the integration mode according to environmental conditions to minimize positioning error.
In this paper, an outdoor positioning system combining GPS, DTMB and FM signals is presented to tackle the positioning problem in complex outdoor environment. The proposed system can adaptively select the appropriate integration mode of the three signals by analyzing environmental characteristics, and then fusing information from part or all of the three signals with an Extended Kalman Filter (EKF) to yield the optimal positioning result.
The rest of the paper is organized as follows:
Section 2 introduces the overall system architecture.
Section 3 describes the details.
Section 4 presents the design of the mode selection scheme.
Section 5 explains design of the sensor fusion filter. In
Section 6, experiments and result analysis are provided. In
Section 7, conclusions and future works are summarized.
4. Adaptive Integration Mode Selection
Various factors indicate environment conditions, such as GDOP of GPS, GDOP of GPS + DTMB, and the number of RPs within constraint range for FM. It is not easy to find a specific formula describing the relationship between integration mode and these factors. Thus, we adopt the fuzzy inference approach to combine these factors and find the optimal integration mode of GPS, DTMB and FM signals.
Fuzzy inference system is predicated upon the fuzzy set theory. In the set theory, the relationship between an element and a set is crisp, either belonging to or not belonging to. However, the relationship between an element and a fuzzy set is described by membership ranging from 0 to 1. The crisp inputs are fuzzified into memberships to fuzzy sets, but the final outputs are crisp values after defuzzification.
The inputs of our fuzzy inference system are GDOP of GPS, GDOP of GPS + DTMB, and number of FM RPs within constraint range. The output is the integration mode: GPS only, GPS + DTMB, and GPS + DTMB + FM. First trigonometric membership functions are utilized to fuzzify the inputs and convert them into memberships. Then, we need to create fuzzy rules to connect inputs and outputs. The fuzzy rules in our system can be described as below:
where
is the
ith rule;
,
, and
are the fuzzified inputs;
,
, and
are the fuzzy sets for inputs;
y is the output before defuzzification; and
is the fuzzy set for the output.
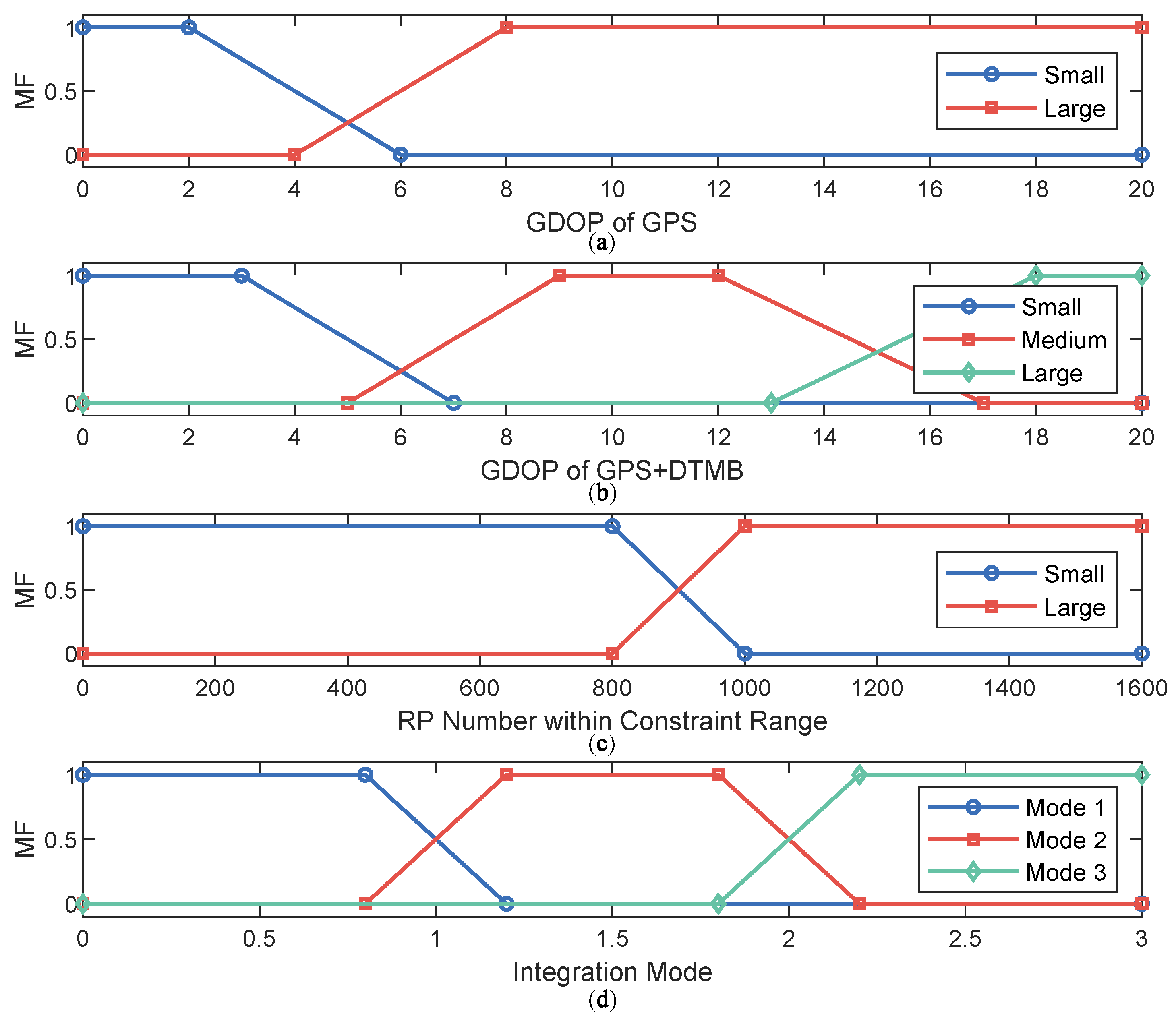
There are two fuzzy sets for both of the input
and
for description of small and large values of them, correspondingly,
,
,
and
. For the input
, three fuzzy sets are used,
,
and
, for description. The three integration mode are denoted by
,
and
, as shown in
Table 1. Membership functions (MF) for inputs and outputs of the fuzzy inference system are shown as
Figure 4. In this way, all fuzzy rules are demonstrated, as shown in
Table 2.
6. Experiments and Analysis
The proposed algorithm was tested at two sites, one on the campus of Beihang University and the other on Kehui Road of Beijing.
The first test region in Beihang University covers an area of around 380 m × 380 m, as shown in
Figure 5. Fifty points were chosen as TP and 282 as RP for the data collection. Then, Kriging interpolation was applied to our collected RP fingerprints to increase the reference point density in a grid style. After interpolation, there were 16,640 RPs in total and the minimum distance between two RPs was 3 m. All of the GPS, DTMB and FM signals were received and measured at the test points, whereas only the FM signal was measured at the reference points. For GPS, the signal used by us is GPS L1 signal. For DTMB, it is DTMB Channel 14 in Beijing. As for FM radio, 21 channels with strong signal strength in Beijing were selected. True locations of the points were obtained using a Novatel IMU-FSAS inertial measurement unit.
Since the availability of GPS satellites is rather good (no fewer than four satellites available at each TP) at the two test areas, loss of satellite signal was achieved by manually shielding some of the satellites. Two subareas were chosen as area with satellite loss, where available satellite number was restricted to three. For simplification of expression, the 50 TPs were numbered from 1 to 50. TPs numbered from 4 to 15 and from 31 to 46 are test points with satellite loss, as shown in
Figure 6. The numbers of available satellites at each point before and after manual shielding are shown in
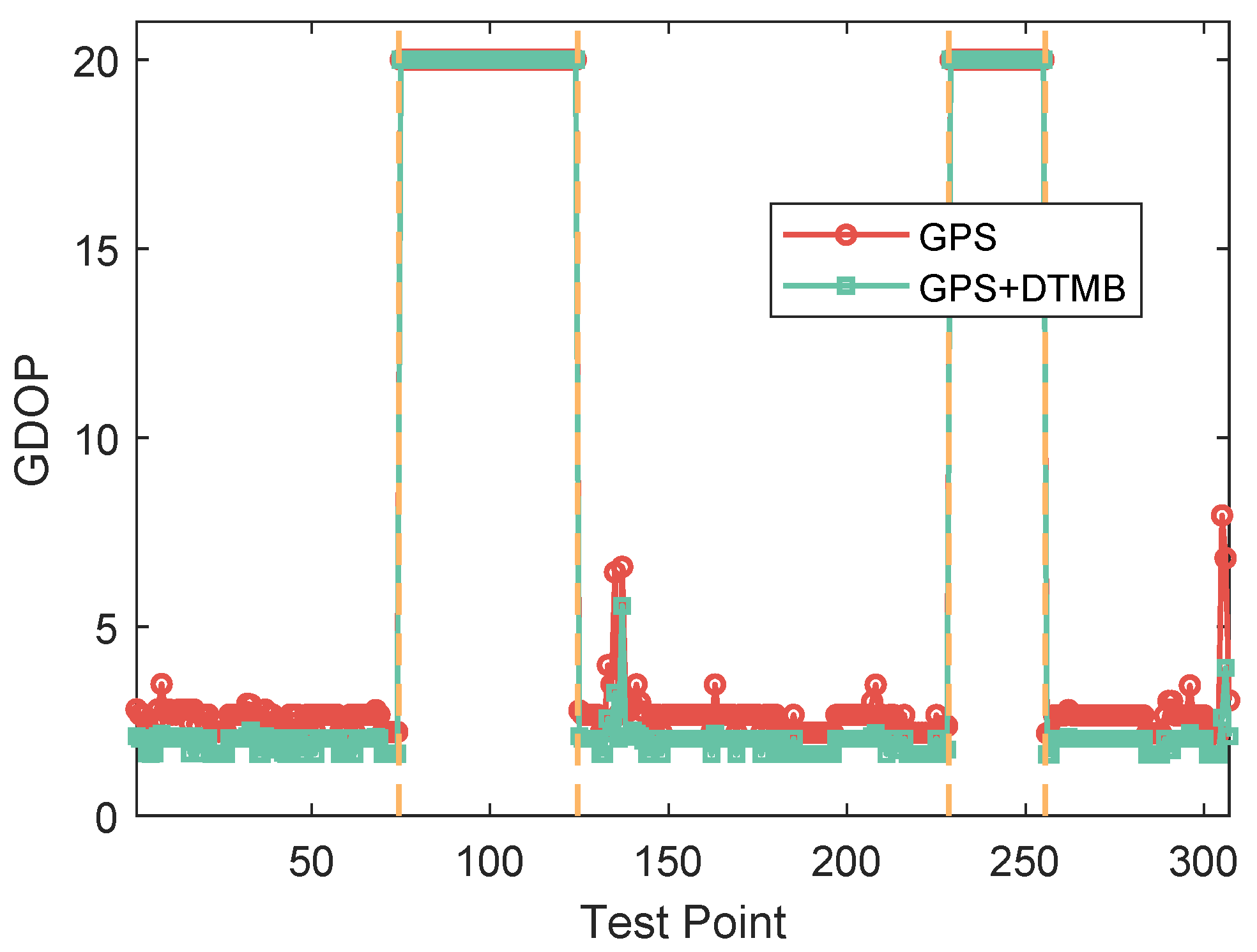
Figure 7. The vertical dashed lines in the figure denote the boundaries between the areas with and without satellite loss. In the figure, we can see that at each point there are at least five satellites available without the satellite loss. The GDOPs of each point under GPS-only and GPS + DTMB mode are illustrated in
Figure 8. Here, we manually set GDOP to 20 when it exceeds 20 for convenience in figure plotting. Putting
Figure 7 and
Figure 8 together, it can be seen that there are at least six available satellites without satellite loss and GDOP of GPS-only mode is no greater than 5. When the number of available satellites is reduced to three, GDOP of GPS-only mode spikes to 20. However, once DTMB was introduced to work together with GPS, GDOP stays below that of GPS-only most of the time, especially in the case of satellite loss. Therefore, it can be concluded that DTMB can improve satellite geometric distribution when the availability of GPS satellites is poor.
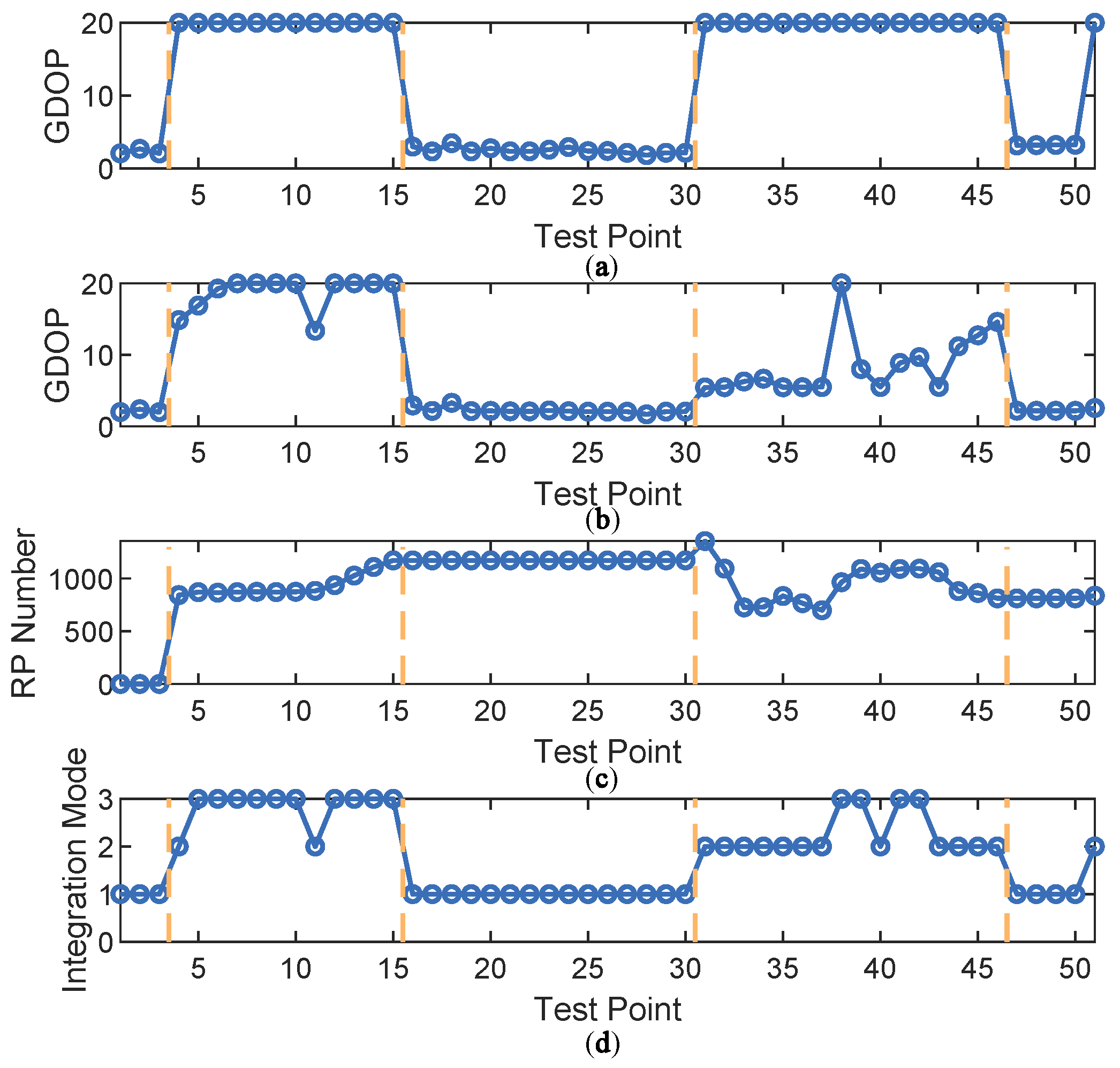
Then, the proposed fuzzy inference system was applied to determine the optimal integration mode at each of the test points. The inputs and output of the fuzzy system are shown in
Figure 9. The test points were divided into five sections by the four vertical dashed lines. For points indexed 1, 2 and 3 in the first section, GPS-only positioning error stayed low with sufficient available satellites, leading to choice of the GPS-only mode. In the second section, the GPS-only mode was no longer chosen because GDOP of GPS-only mode increased due to satellite loss. At this time, GDOP of GPS + DTMB varied with time. When GDOP of GPS + DTMB is relatively small, this mode is preferred. However, if it is too large, FM will be introduced to assist them, which is the GPS + DTMB + FM mode. In the third section, available satellite number became adequate again and GPS-only mode was chosen. In the fourth section, GDOP of GPS + DTMB was relatively small most of the time, resulting in the choice of the GPS + DTMB mode. Under some circumstances where GDOP of GPS + DTMB is not small enough and RP number within constraint range is sufficient, the GPS + DTMB + FM mode can yield more precise positioning results. In the last section, GPS-only mode was selected when there was enough available satellites. In other cases, where GDOP of GPS is too large, the GPS + DTMB mode is favored as GDOP is limited to a small level with the help of DTMB.
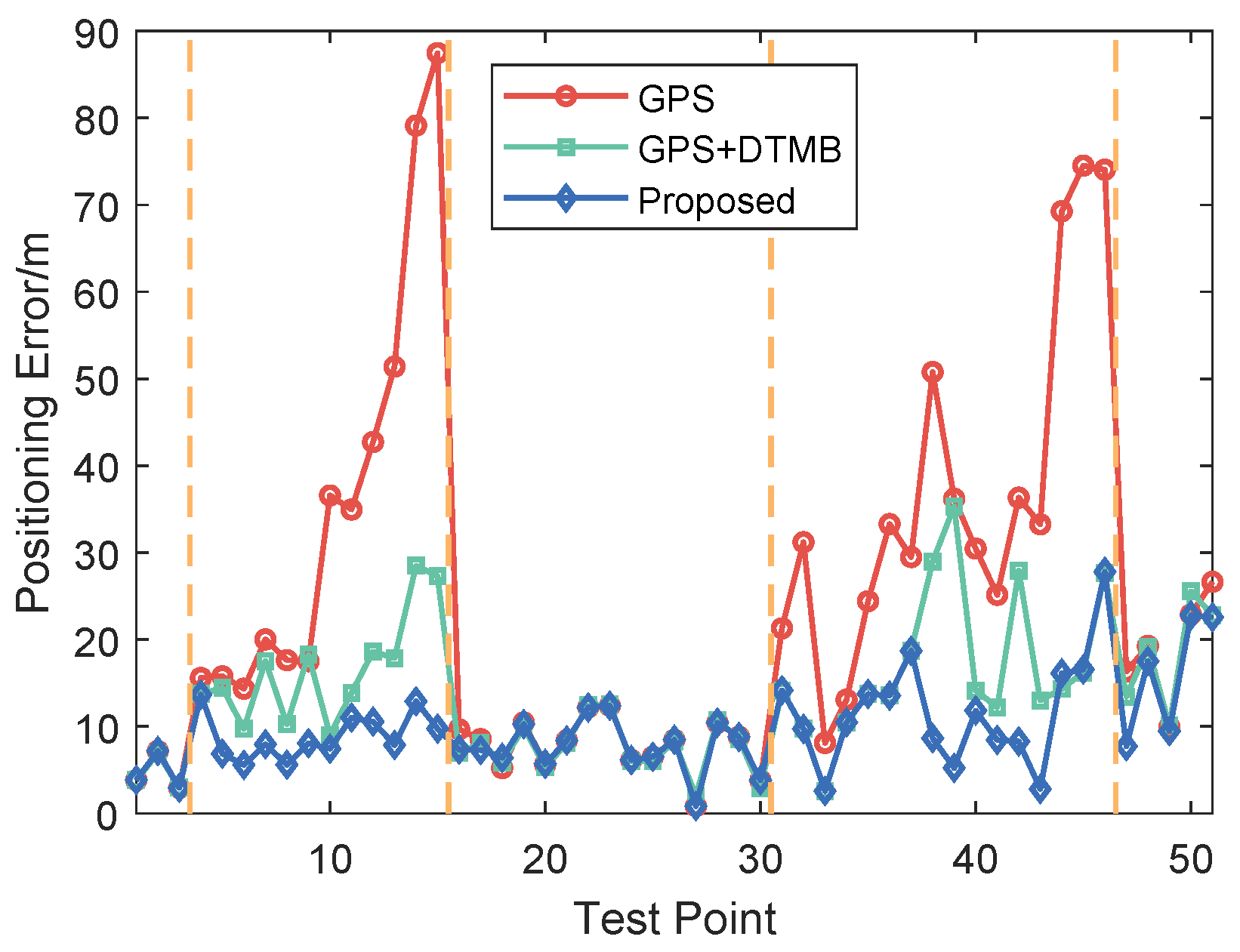
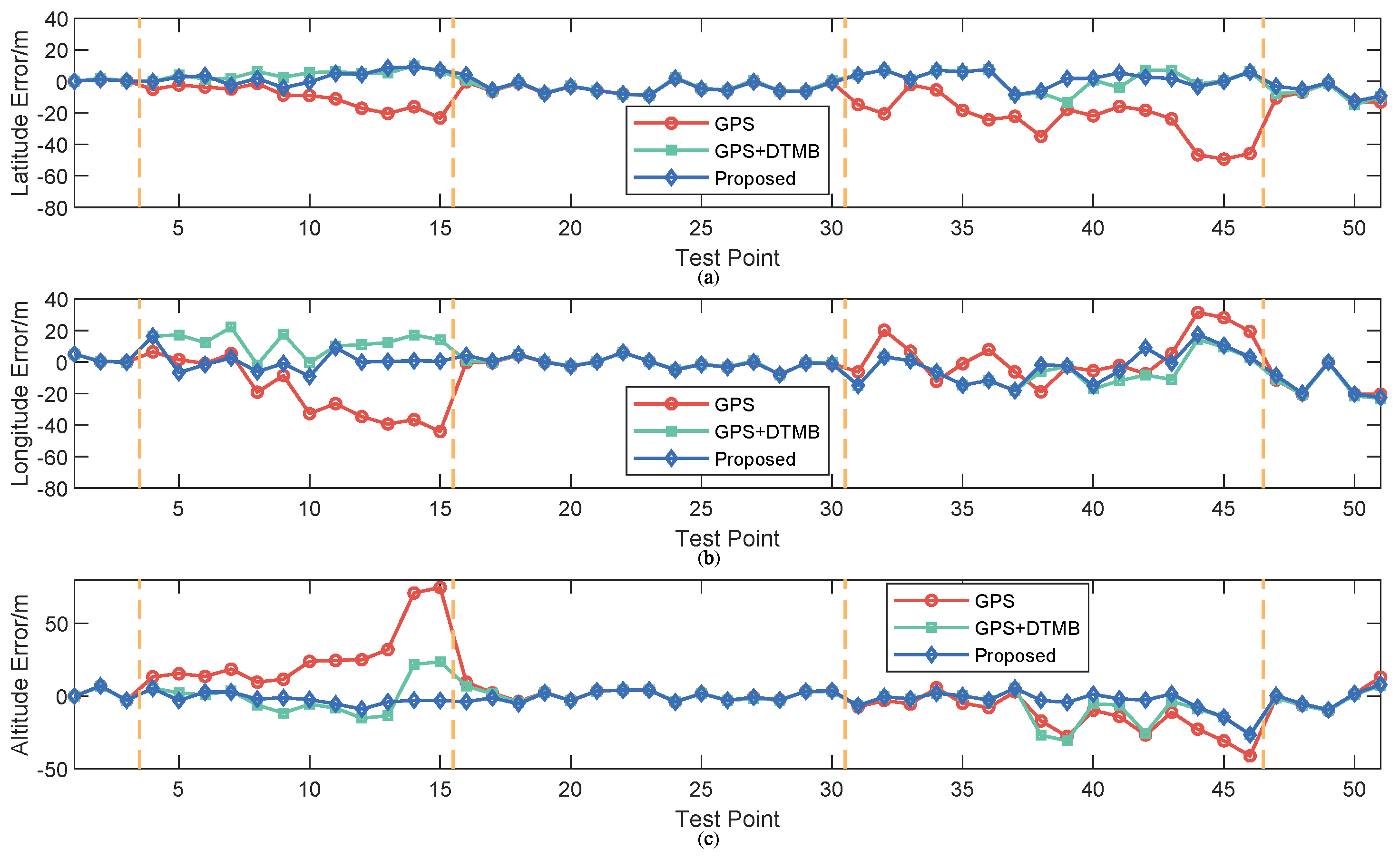
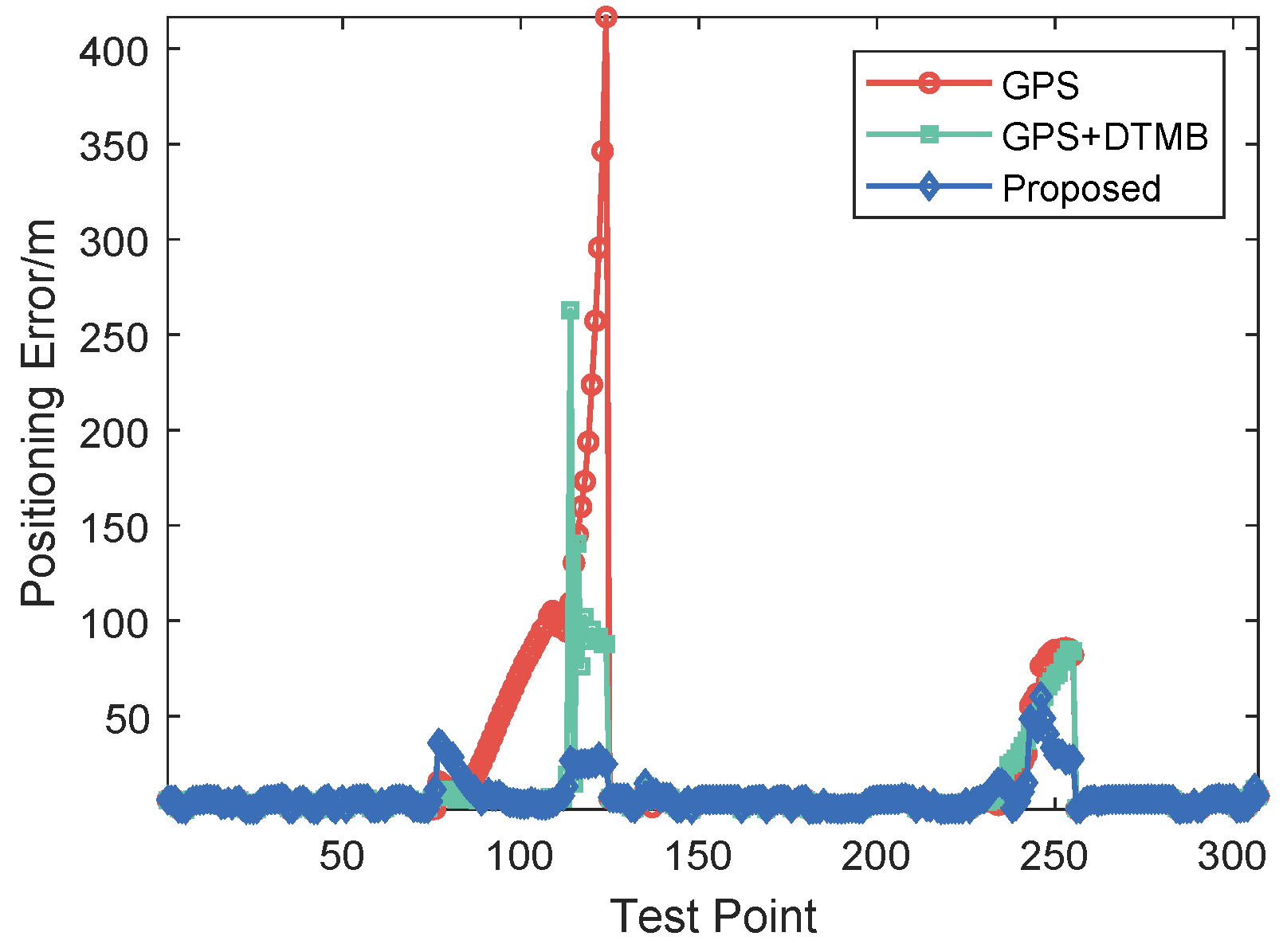
To show the performance of the proposed approach, positioning error of the proposed method was compared with that of GPS and GPS + DTMB. Positioning error of each test point is shown in
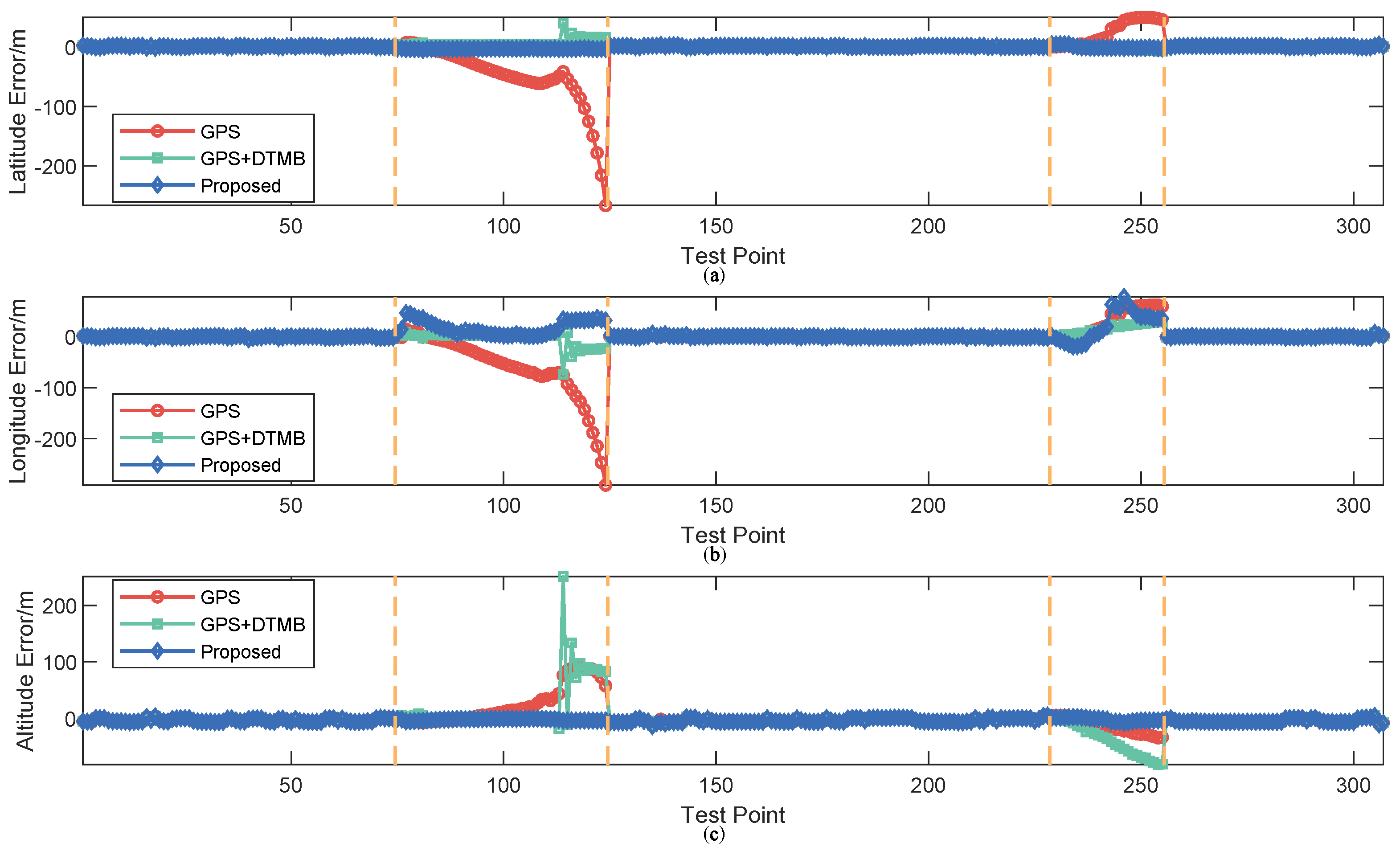
Figure 10, where it is demonstrated that overall positioning accuracy of the proposed method outperformws the other two, and the incorporation of DTMB reduced positioning error of GPS. Errors of the three methods in latitude/longitude/altitude direction are also provided (
Figure 11), where we found that the proposed method outperformed the other two in the three directions most of the time. Then, the true positions of the test points were connected as a virtual trajectory and compared with the trajectories connected by positioning results, as shown in
Figure 12. The total travel distance of the trajectory at this site was 828.66 m. The plane location error was small with good GPS availability and increased when confronted with satellite loss. At most points, the plane location error of the proposed method was smaller than that of the GPS-only and the GPS + DTMB method, which is consistent with the results in
Figure 11.
For better evaluation of error performance of the proposed method, empirical cumulative distribution functions (CDF) of positioning errors of the three methods are shown in
Figure 13. The
,
and
errors are also included in
Table 3, where we can see that
error of the proposed method was
less than that of GPS + DTMB and
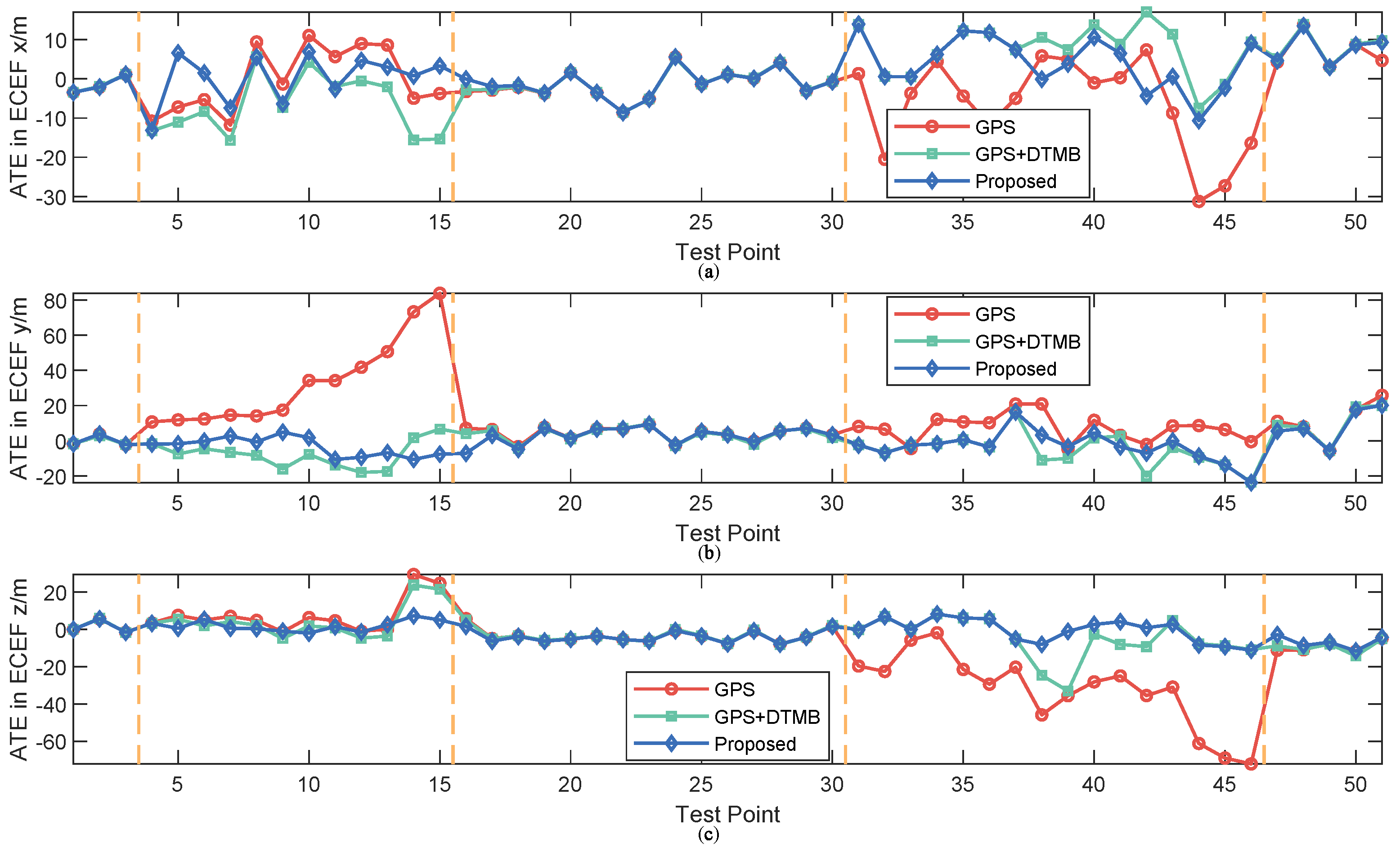
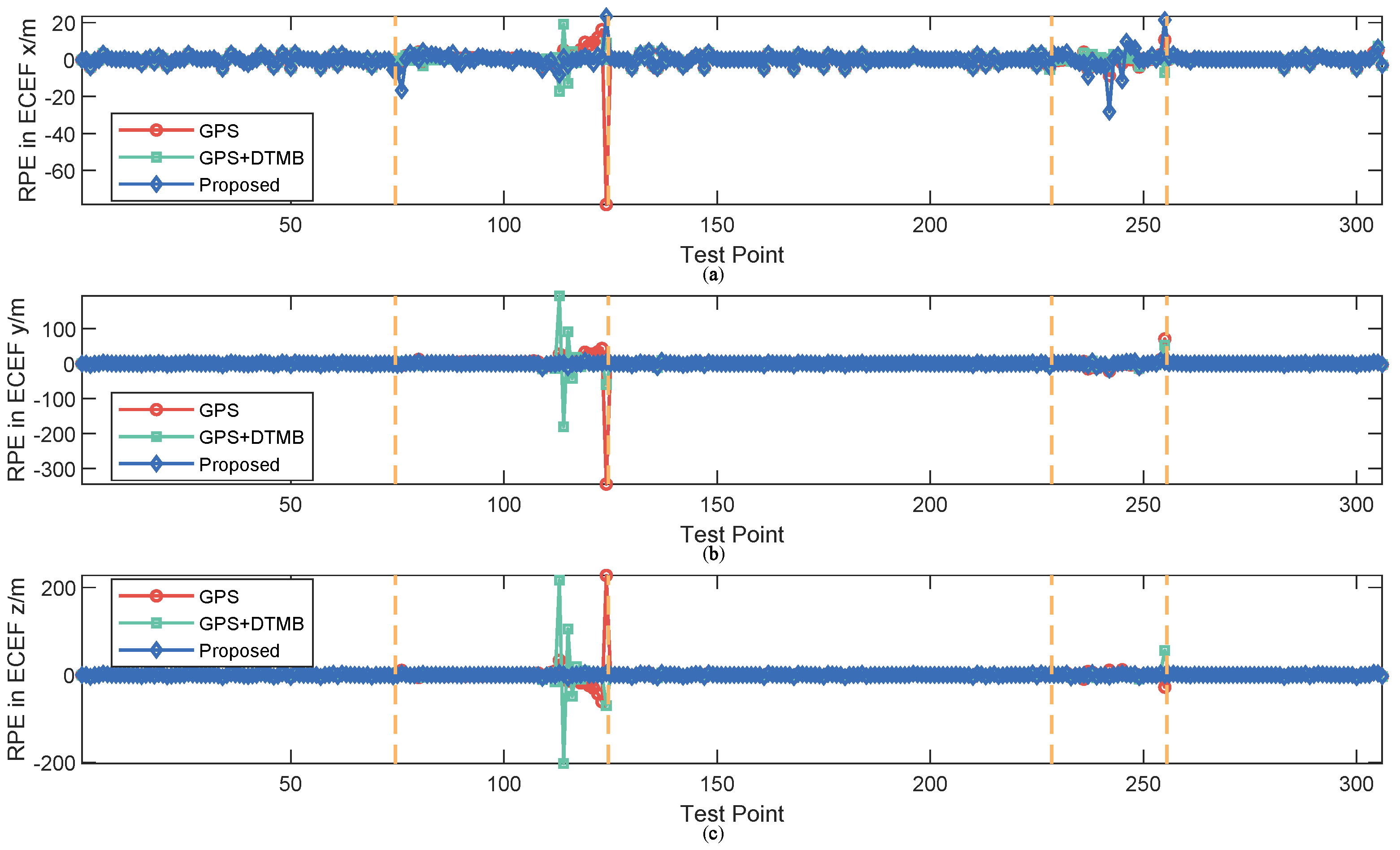
less than that of GPS. We also calculated the absolute trajectory errors (ATE) and relative pose errors (RPE) [
29] of the three methods at this site, as shown in
Figure 14 and
Figure 15. The ECEF coordinate system was chosen as the reference coordinate system to calculate ATE and RPE. The time interval
was chosen as 1 second in the calculation of RPE. In the figures, we can see that the proposed method achieved the best performance among the three methods most of the time considering both ATE and RPE. We also calculated the average value and root mean square (RMSE) value of ATE and RPE (
Table 4). It can be seen that mean ATE of the proposed method was
less than that of GPS-only and
less than that of GPS + DTMB, and for RMSE of ATE the improvement was, correspondingly,
and
. On the other hand, mean RPE of the proposed method was
less than that of GPS-only and
less than that of GPS + DTMB, and for RMSE of RPE the improvement was, correspondingly,
and
.
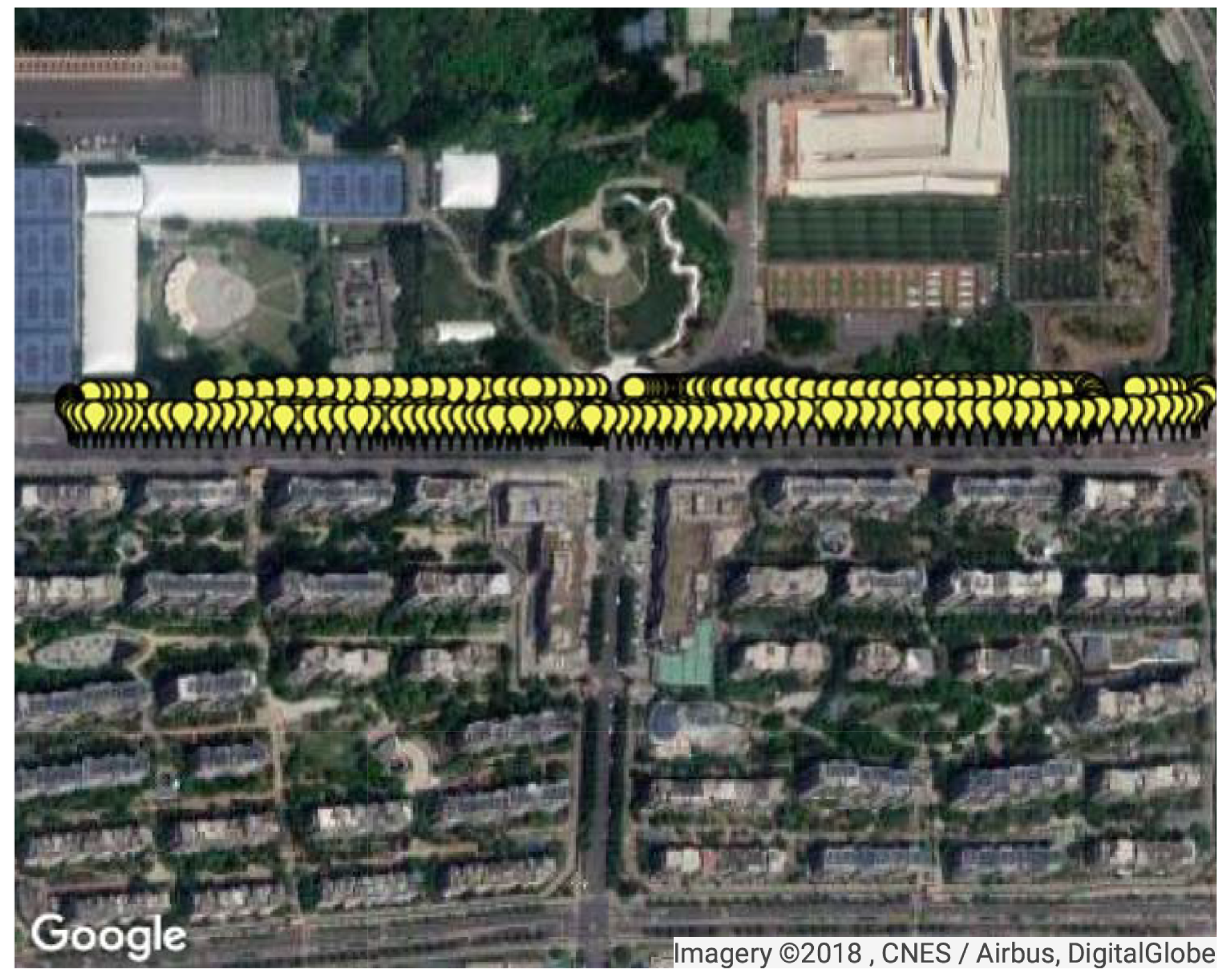
The second test site was on a two-way road, where the single-trip length was around 850 m. Data collection was performed on a car at the frequency of 1 Hz and the total travel distance of test data was 3179.95 m, as shown in
Figure 16. FM fingerprint data were collected along the test area. There were 361 test points and 395 reference points at Site 2. In consideration of the density of RPs here, interpolation was not performed at Site 2.
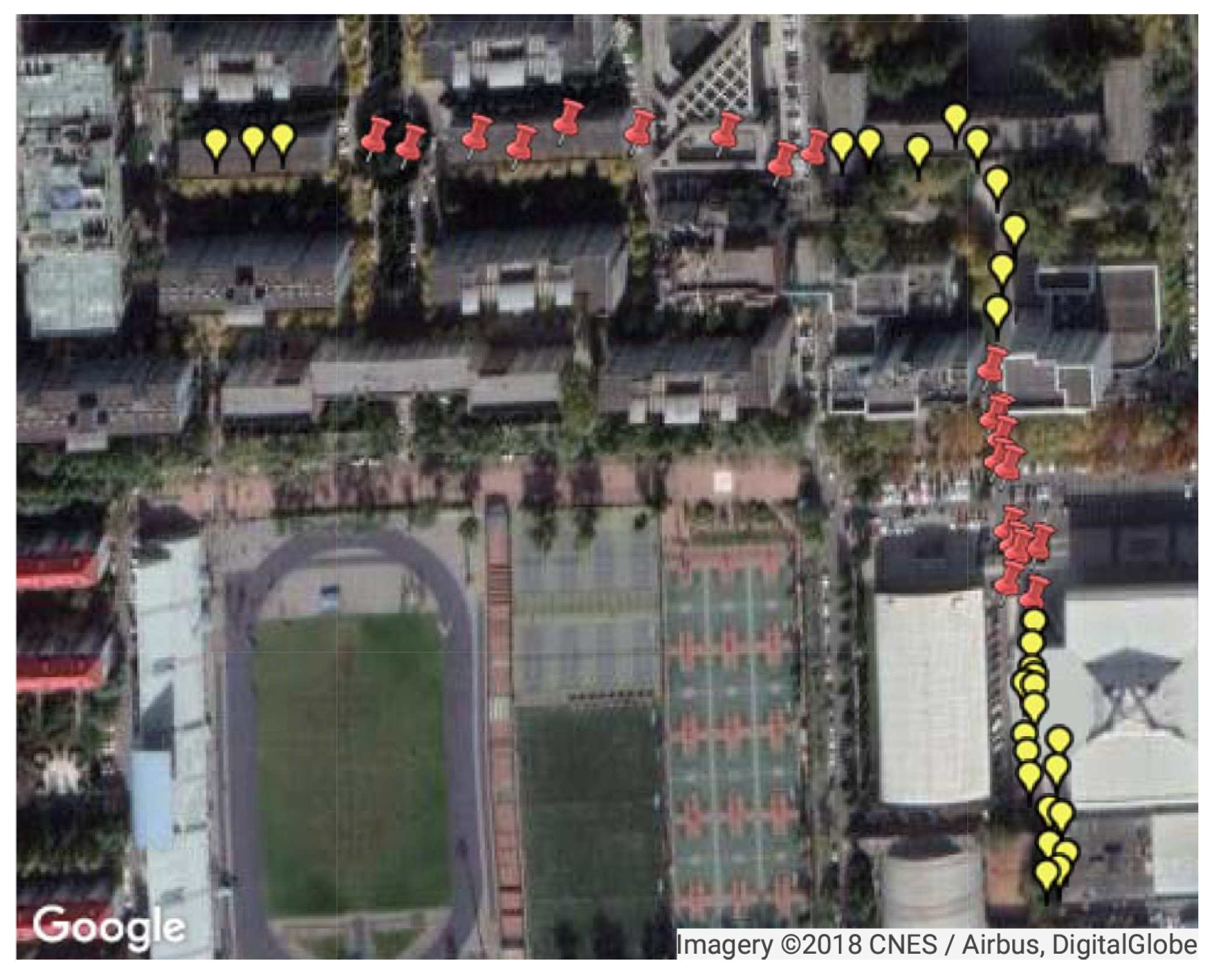
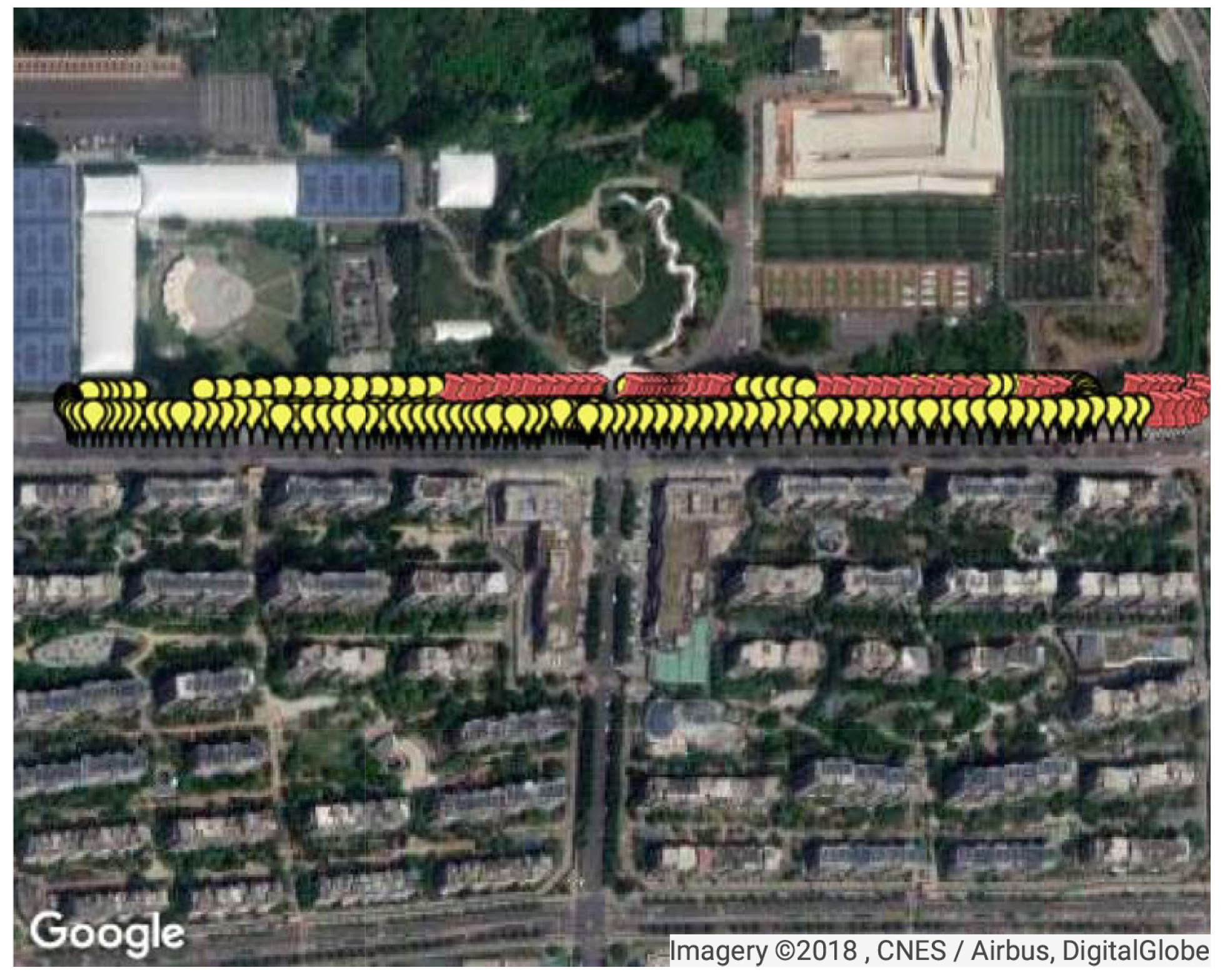
Two segments were chosen as the areas with satellite loss at Site 2, where available satellite number was restricted to two. Test points at the two segments are shown on satellite map as the red points in
Figure 17. Visible satellite numbers at the sampling points before and after manual satellite signal shielding are shown as
Figure 18. In the figure, we can see that before manual satellite loss there were more than five available satellite at most test points. Restriction on satellite number led to changes in GDOP, as shown in
Figure 19. When signals from some satellites were shielded, GDOP increased instantly. The inputs and output of our fuzzy inference system are shown in
Figure 20. In the figure, we can see that the integration modes at points without satellite loss were mostly GPS-only and at points with satellite loss remained the proposed GPS + DTMB + FM mode.
Positioning errors of the three approaches at Site 2 are shown as
Figure 21, where it is shown that the overall error of the proposed method was the smallest of the three. At the first segment with satellite loss, the error of GPS increased rapidly due to lack of sufficient satellites. Although not large at first, the error of GPS + DTMB also amounted gradually. As for the proposed method, its error was always constrained within 36 m. At the second segment with satellite loss, the relative relationship of positioning error of the three methods was similar to that of the first segment. Errors in latitude/longitude/altitude direction of the three methods are shown in
Figure 22, and trajectories generated by the three methods are shown in
Figure 23. In the two figures, we can see that positioning accuracy of the proposed method outperformed those of the other two methods in the three directions most of the time.
Empirical CDF of positioning errors of the three methods are illustrated as
Figure 24, and
,
and
errors are given in
Table 5. We can see in the figure and the table that the proposed method outperfomed GPS and GPS + DTMB in overall positioning accuracy. The
error improvement of the proposed method was
compared to the GPS-only method and
compared to the GPS + DTMB method. The absolute trajectory errors (ATE) and relative pose errors (RPE) of the three methods at Site 2 are shown in
Figure 25 and
Figure 26. In the two figures, we can see that the proposed method outperformed the other two methods most of the time considering both ATE and RPE. Although the proposed method showed larger ATE error in ECEF
x direction at the beginning of the first segment with satellite loss, the positioning result converged in a short time and kept good accuracy afterwards. We also calculated the average value and root mean square (RMSE) value of ATE and RPE (
Table 6). It can be seen in the table that mean ATE of the proposed method was
less than that of GPS-only and
less than that of GPS + DTMB, and for RMSE ATE the improvement was, correspondingly,
and
. On the other hand, mean RPE of the proposed method was
less than that of GPS-only and
less than that of GPS + DTMB, and for RMSE RPE the improvement was, correspondingly,
and
. From the analysis above, it can be concluded that positioning error of GPS + DTMB was smaller than that of GPS, and the proposed method can further improve positioning accuracy with the aid of FM information and adaptive integration mode selection.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}