Towards the Internet of Flying Robots: A Survey



Abstract
1. Introduction
1.1. Motivation
1.2. Contribution
1.3. Paper Organization
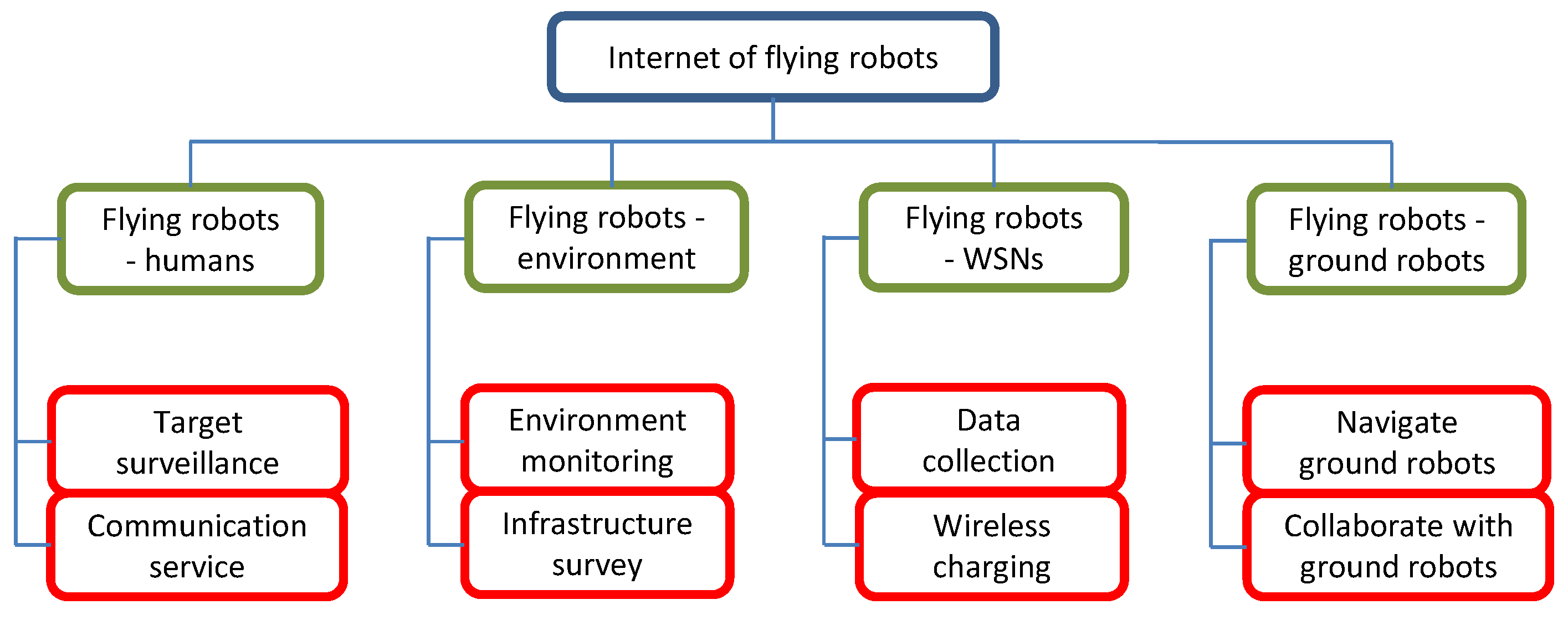
2. Flying Robots Serving People and a WSN
2.1. Coverage Model
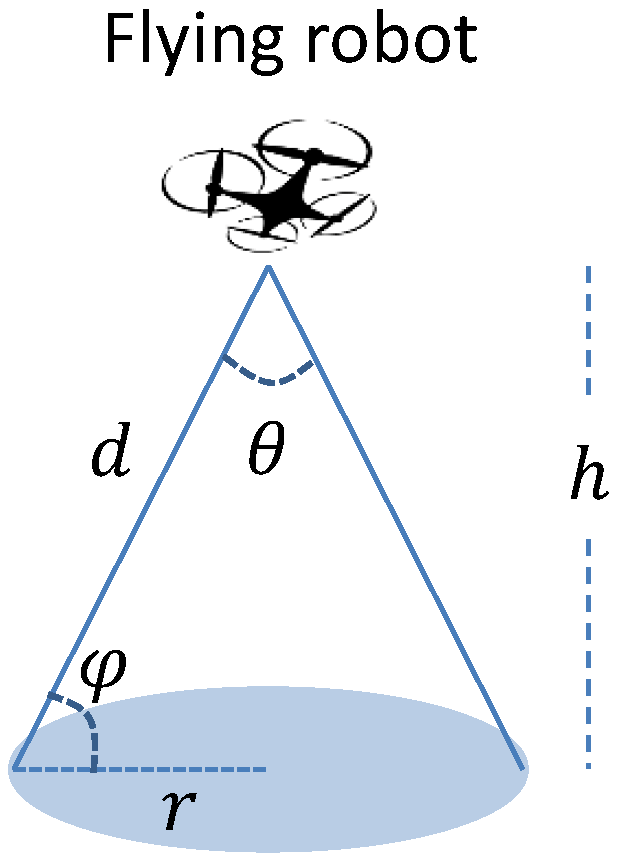
2.1.1. Camera Coverage
2.1.2. Charging Coverage
2.1.3. Communication Coverage I
2.1.4. Communication Coverage II
2.2. Connectivity
2.3. Energy Consumption
2.4. Coverage Cptimization
2.4.1. Maximizing the Number of Covered Targets
2.4.2. Minimizing Robot-User Distance
2.4.3. Minimizing the Number of Flying Robots
2.4.4. Minimizing Energy Consumption
2.4.5. Other Optimization Problems
2.5. Summary
3. Flying Robots Collaborating with Ground Objects
3.1. Flying-Ground Robotic System
3.1.1. Target Search
3.1.2. Path Planning and Target Reaching
3.1.3. Integrated Systems
3.2. Flying Robots Collaborating with a WSN
3.2.1. Localization of Flying Robots
3.2.2. Navigation of Flying Robots
3.3. Summary
4. Discussions and Future Research Directions
4.1. Connectivity Consideration
4.2. Optimal Deployment in 3D Space
4.3. Reactive Deployment of Flying Robots
4.4. Navigation with Collision Avoidance
4.5. Charging Flying Robots
5. Conclusions
Funding
Conflicts of Interest
Abbreviations
| IoFR | Internet of Flying Robots |
| FR | Flying Robot |
| WSN | Wireless Sensor Network |
| SBS | Stationary Base Station |
| LoS | Line-of-Sight |
| SNR | Signal-to-Noise Ratio |
| SINR | Signal-to-Interference-and-Noise Ratio |
| RSSI | received signal strength indication |
References
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Simoens, P.; Dragone, M.; Saffiotti, A. The Internet of Robotic Things: A review of concept, added value and applications. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Chandrasekharan, S.; Gomez, K.; Al-Hourani, A.; Kandeepan, S.; Rasheed, T.; Goratti, L.; Reynaud, L.; Grace, D.; Bucaille, I.; Wirth, T.; Allsopp, S. Designing and implementing future aerial communication networks. IEEE Commun. Mag. 2016, 54, 26–34. [Google Scholar] [CrossRef]
- Vachtsevanos, G.J.; Valavanis, K.P. Military and civilian unmanned aircraft. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; pp. 93–103. [Google Scholar]
- Huang, H.; Savkin, A.V. A Method for Optimized Deployment of Unmanned Aerial Vehicles for Maximum Coverage and Minimum Interference in Cellular Networks. IEEE Trans. Ind. Inf. 2018. [Google Scholar] [CrossRef]
- Pugliese, L.D.P.; Guerriero, F.; Zorbas, D.; Razafindralambo, T. Modelling the mobile target covering problem using flying drones. Optim. Lett. 2016, 10, 1021–1052. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Kanistras, K.; Martins, G.; Rutherford, M.J.; Valavanis, K.P. A survey of unmanned aerial vehicles (UAVs) for traffic monitoring. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2014; pp. 2643–2666. [Google Scholar]
- Zhou, Z.; Zhang, C.; Xu, C.; Xiong, F.; Zhang, Y.; Umer, T. Energy-Efficient Industrial Internet of UAVs for Power Line Inspection in Smart Grid. IEEE Trans. Ind. Inf. 2018, 14, 2705–2714. [Google Scholar] [CrossRef]
- Esakki, B.; Ganesan, S.; Mathiyazhagan, S.; Ramasubramanian, K.; Gnanasekaran, B.; Son, B.; Park, S.W.; Choi, J.S. Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things. Sensors 2018, 18, 3318. [Google Scholar] [CrossRef] [PubMed]
- Adams, S.M.; Friedland, C.J. A survey of unmanned aerial vehicle (UAV) usage for imagery collection in disaster research and management. In Proceedings of the 9th International Workshop on Remote Sensing for Disaster Response, Stanford, CA, USA, 15–16 September 2011; p. 8. [Google Scholar]
- Caillouet, C.; Razafindralambo, T. Efficient deployment of connected unmanned aerial vehicles for optimal target coverage. In Proceedings of the 2017 Global Information Infrastructure and Networking Symposium (GIIS), St. Pierre, France, 25–27 October 2017; pp. 1–8. [Google Scholar]
- Gatteschi, V.; Lamberti, F.; Paravati, G.; Sanna, A.; Demartini, C.; Lisanti, A.; Venezia, G. New frontiers of delivery services using drones: A prototype system exploiting a quadcopter for autonomous drug shipments. In Proceedings of the 2015 IEEE 39th Annual Computer Software and Applications Conference (COMPSAC), Taichung, Taiwan, 1–5 July 2015; Volume 2, pp. 920–927. [Google Scholar]
- This Startup Is Using Drones to Deliver Medicine in Rwanda. Available online: http://www.theverge.com/2016/4/5/11367274/zipline-dronedeliveryrwanda-medicine-blood (accessed on 18 November 2018).
- Chao, H.; Cao, Y.; Chen, Y. Autopilots for small unmanned aerial vehicles: A survey. Int. J. Control Autom. Syst. 2010, 8, 36–44. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, S. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and networking of UAV-based systems: Classification and associated architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Zorbas, D.; Razafindralambo, T.; Guerriero, F. Energy efficient mobile target tracking using flying drones. Procedia Comput. Sci. 2013, 19, 80–87. [Google Scholar] [CrossRef]
- Trotta, A.; Felice, M.D.; Montori, F.; Chowdhury, K.R.; Bononi, L. Joint Coverage, Connectivity, and Charging Strategies for Distributed UAV Networks. IEEE Trans. Robot. 2018, 34, 883–900. [Google Scholar] [CrossRef]
- Zorbas, D.; Pugliese, L.D.P.; Razafindralambo, T.; Guerriero, F. Optimal drone placement and cost-efficient target coverage. J. Netw. Comput. Appl. 2016, 75, 16–31. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement Optimization of UAV-Mounted Mobile Base Stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef]
- Zorbas, D.; Douligeris, C. Computing optimal drone positions to wirelessly recharge IoT devices. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 628–633. [Google Scholar]
- Win, M.Z.; Pinto, P.C.; Shepp, L.A. A mathematical theory of network interference and its applications. Proc. IEEE 2009, 97, 205–230. [Google Scholar] [CrossRef]
- Wireless Power for a Wireless World. Available online: http://www.powercastco.com (accessed on 18 November 2018).
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 2898–2904. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Deployment of Unmanned Aerial Vehicle Base Stations for Optimal Quality of Coverage. IEEE Wirel. Commun. Lett. 2018. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. An Algorithm of Efficient Proactive Placement of Autonomous Drones for Maximum Coverage in Cellular Networks. IEEE Wirel. Commun. Lett. 2018. [Google Scholar] [CrossRef]
- Caillouet, C.; Giroire, F.; Razafindralambo, T. Optimization of mobile sensor coverage with UAVs. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 622–627. [Google Scholar]
- Freitas, E.P.D.; Heimfarth, T.; Netto, I.F.; Lino, C.E.; Pereira, C.E.; Ferreira, A.M.; Wagner, F.R.; Larsson, T. UAV relay network to support WSN connectivity. In Proceedings of the International Congress on Ultra Modern Telecommunications and Control Systems, Moscow, Russia, 18–20 Octomber 2010; pp. 309–314. [Google Scholar]
- Jiang, F.; Swindlehurst, A.L. Optimization of UAV Heading for the Ground-to-Air Uplink. IEEE J. Sel. Areas Commun. 2012, 30, 993–1005. [Google Scholar] [CrossRef]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-Enabled Wireless Power Transfer: Trajectory Design and Energy Optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Khreishah, A.; Chakareski, J.; Salameh, H.B.; Khalil, I. On the continuous coverage problem for a swarm of UAVs. In Proceedings of the 2016 IEEE 37th Sarnoff Symposium, Newark, NJ, USA, 19–21 September 2016; pp. 130–135. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef]
- Bor-Yaliniz, I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-D placement of an aerial base station in next generation cellular networks. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–5. [Google Scholar]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. Deployment of UAV-mounted access points according to spatial user locations in two-tier cellular networks. In Proceedings of the 2016 Wireless Days (WD), Toulouse, France, 23–25 March 2016; pp. 1–6. [Google Scholar]
- Huang, H.; Savkin, A.V.; Ding, M.; Kaafar, M.A.; Huang, C. On the Problem of Flying Robots Deployment to Improve Cellular User Experience. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 6356–6359. [Google Scholar]
- Sharma, V.; Bennis, M.; Kumar, R. UAV-assisted heterogeneous networks for capacity enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210. [Google Scholar] [CrossRef]
- Becvar, Z.; Vondra, M.; Mach, P.; Plachy, J.; Gesbert, D. Performance of Mobile Networks with UAVs: Can Flying Base Stations Substitute Ultra-Dense Small Cells? In Proceedings of the European Wireless 2017 23th European Wireless Conference, Dresden, Germany, 17–19 May 2017; pp. 1–7. [Google Scholar]
- Fotouhi, A.; Ding, M.; Hassan, M. Flying Drone Base Stations for Macro Hotspots. IEEE Access 2018, 6, 19530–19539. [Google Scholar] [CrossRef]
- Pathirana, P.N.; Savkin, A.V.; Jha, S. Location estimation and trajectory prediction for cellular networks with mobile base stations. IEEE Trans. Veh. Technol. 2004, 53, 1903–1913. [Google Scholar] [CrossRef]
- Pathirana, P.N.; Bulusu, N.; Savkin, A.V.; Jha, S. Node localization using mobile robots in delay-tolerant sensor networks. IEEE Trans. Mob. Comput. 2005, 4, 285–296. [Google Scholar] [CrossRef]
- Petersen, I.R.; Savkin, A.V. Robust Kalman Filtering for Signals and Systems with Large Uncertainties; Birkhauser: Boston, MA, USA, 1999. [Google Scholar]
- Huang, H.; Savkin, A.V. Reactive Deployment of Flying Robot Base Station over Disaster Areas. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics, Kuala Lumpur, Malaysia, 12–15 December 2018. [Google Scholar]
- Zhao, H.; Wang, H.; Wu, W.; Wei, J. Deployment Algorithms for UAV Airborne Networks towards On-demand Coverage. IEEE J. Sel. Areas Commun. 2018. [Google Scholar] [CrossRef]
- Kalantari, E.; Yanikomeroglu, H.; Yongacoglu, A. On the Number and 3D Placement of Drone Base Stations in Wireless Cellular Networks. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 Sepember 2016; pp. 1–6. [Google Scholar]
- Sabino, S.; Grilo, A. Topology Control of Unmanned Aerial Vehicle (UAV) Mesh Networks: A Multi-Objective Evolutionary Algorithm Approach. In Proceedings of the 4th ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, New York, NY, USA, 10–15 June 2018; pp. 45–50. [Google Scholar]
- Wang, L.; Hu, B.; Chen, S. Energy Efficient Placement of a Drone Base Station for Minimum Required Transmit Power. IEEE Wirel. Commun. Lett. 2018. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-Efficient Data Collection in UAV Enabled Wireless Sensor Network. IEEE Wirel. Commun. Lett. 2018, 7, 328–331. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Ding, M.; Huang, C. Mobile robots in wireless sensor networks: A survey on tasks. Comput. Netw. 2019, 148, 1–19. [Google Scholar] [CrossRef]
- Johnson, J.; Basha, E.; Detweiler, C. Charge selection algorithms for maximizing sensor network life with UAV-based limited wireless recharging. In Proceedings of the 2013 IEEE Eighth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, VIC, Australia, 2–5 April 2013; pp. 159–164. [Google Scholar]
- Pang, Y.; Zhang, Y.; Gu, Y.; Pan, M.; Han, Z.; Li, P. Efficient data collection for wireless rechargeable sensor clusters in Harsh terrains using UAVs. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 234–239. [Google Scholar]
- Li, L.; Xu, Y.; Zhang, Z.; Yin, J.; Chen, W.; Han, Z. A Prediction-Based Charging Policy and Interference Mitigation Approach in the Wireless Powered Internet of Things. IEEE J. Sel. Areas Commun. 2018. [Google Scholar] [CrossRef]
- Wu, T.; Yang, P.; Dai, H.; Li, P.; Rao, X. Near optimal bounded route association for drone-enabled rechargeable WSNs. Comput. Netw. 2018, 145, 107–117. [Google Scholar] [CrossRef]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Maini, P.; Sujit, P. On cooperation between a fuel constrained UAV and a refueling UGV for large scale mapping applications. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 1370–1377. [Google Scholar]
- Shetty, V.K.; Sudit, M.; Nagi, R. Priority-based assignment and routing of a fleet of unmanned combat aerial vehicles. Comput. Oper. Res. 2008, 35, 1813–1828. [Google Scholar] [CrossRef]
- Butzkey, J.; Dornbushy, A.; Likhachevy, M. 3-D exploration with an air-ground robotic system. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 Octomber 2015; pp. 3241–3248. [Google Scholar]
- Surmann, H.; Nüchter, A.; Hertzberg, J. An autonomous mobile robot with a 3D laser range finder for 3D exploration and digitalization of indoor environments. Robot. Autom. Syst. 2003, 45, 181–198. [Google Scholar] [CrossRef]
- Shim, D.H.; Chung, H.; Sastry, S.S. Conflict-free navigation in unknown urban environments. IEEE Robot. Autom Mag. 2006, 13, 27–33. [Google Scholar] [CrossRef]
- Stachniss, C.; Mozos, Ó.M.; Burgard, W. Efficient exploration of unknown indoor environments using a team of mobile robots. Ann. Math. Artif. Intell. 2008, 52, 205–227. [Google Scholar] [CrossRef]
- Shim, D.; Chung, H.; Kim, H.J.; Sastry, S. Autonomous exploration in unknown urban environments for unmanned aerial vehicles. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005; p. 6478. [Google Scholar]
- Bachrach, A.; He, R.; Roy, N. Autonomous flight in unknown indoor environments. Int. J. Micro Air Veh. 2009, 1, 217–228. [Google Scholar] [CrossRef]
- Weiss, S.; Scaramuzza, D.; Siegwart, R. Monocular-SLAM–based navigation for autonomous micro helicopters in GPS-denied environments. J. Field Robot. 2011, 28, 854–874. [Google Scholar] [CrossRef]
- Khan, Y.N.; Masselli, A.; Zell, A. Visual terrain classification by flying robots. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 498–503. [Google Scholar]
- Grocholsky, B.; Keller, J.; Kumar, R.V.; Pappas, G.J. Cooperative Air and Ground Surveillance. 2006. Available online: https://repository.upenn.edu/meam_papers/74/ (accessed on 18 November 2018).
- Tovar, B.; Valle, S.M.L.; Murrieta, R. Optimal navigation and object finding without geometric maps or localization. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 464–470. [Google Scholar]
- Burgard, W.; Moors, M.; Stachniss, C.; Schneider, F.E. Coordinated multi-robot exploration. IEEE Trans. Robot. 2005, 21, 376–386. [Google Scholar] [CrossRef]
- Anderson, M.; Papanikolopoulos, N. Implicit Cooperation Strategies for Multi-robot Search of Unknown Areas. J. Intell. Robot. Syst. 2008, 53, 381–397. [Google Scholar] [CrossRef]
- Ha, I.K.; Cho, Y.Z. A Probabilistic Target Search Algorithm Based on Hierarchical Collaboration for Improving Rapidity of Drones. Sensors 2018, 18, 2535. [Google Scholar] [CrossRef] [PubMed]
- Doherty, P.; Rudol, P. A UAV search and rescue scenario with human body detection and geolocalization. In AI 2007: Advances in Artificial Intelligence. AI 2007. Lecture Notes in Computer Science; AOrgun, M.A., Thornton, J., Eds.; Springer: Berlin, Germany, 2007; pp. 1–13. [Google Scholar]
- Goodrich, M.A.; Morse, B.S.; Gerhardt, D.; Cooper, J.L.; Quigley, M.; Adams, J.A.; Humphrey, C. Supporting wilderness search and rescue using a camera-equipped mini UAV. J. Field Robot. 2008, 25, 89–110. [Google Scholar] [CrossRef]
- Morse, B.S.; Engh, C.H.; Goodrich, M.A. UAV video coverage quality maps and prioritized indexing for wilderness search and rescue. In Proceedings of the 5th International Conference on Human-robot Interaction, Osaka, Japan, 2–5 March 2010; pp. 227–234. [Google Scholar]
- Waharte, S.; Trigoni, N. Supporting search and rescue operations with UAVs. In Proceedings of the 2010 IEEE International Conference on Emerging Security Technologies (EST), Canterbury, UK, 6–7 September 2010; pp. 142–147. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numerische Mathematik 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Toibero, J.M.; Roberti, F.; Carelli, R. Stable contour-following control of wheeled mobile robots. Robotica 2009, 27, 1–12. [Google Scholar] [CrossRef]
- Savkin, A.V.; Wang, C. Seeking a path through the crowd: Robot navigation in unknown dynamic environments with moving obstacles based on an integrated environment representation. Robot. Autom. Syst. 2014, 62, 1568–1580. [Google Scholar] [CrossRef]
- Matveev, A.S.; Teimoori, H.; Savkin, A.V. A method for guidance and control of an autonomous vehicle in problems of border patrolling and obstacle avoidance. Automatica 2011, 47, 515–524. [Google Scholar] [CrossRef]
- Matveev, A.S.; Hoy, M.C.; Savkin, A.V. The problem of boundary following by a unicycle-like robot with rigidly mounted sensors. Robot. Autom. Syst. 2013, 61, 312–327. [Google Scholar] [CrossRef]
- Matveev, A.S.; Wang, C.; Savkin, A.V. Real-time navigation of mobile robots in problems of border patrolling and avoiding collisions with moving and deforming obstacles. Robot. Autom. Syst. 2012, 60, 769–788. [Google Scholar] [CrossRef]
- Savkin, A.V.; Wang, C. A simple biologically inspired algorithm for collision-free navigation of a unicycle-like robot in dynamic environments with moving obstacles. Robotica 2013, 31, 993–1001. [Google Scholar] [CrossRef]
- Hoy, M.; Matveev, A.S.; Savkin, A.V. Algorithms for collision-free navigation of mobile robots in complex cluttered environments: A survey. Robotica 2015, 33, 463–497. [Google Scholar] [CrossRef]
- Savkin, A.V.; Matveev, A.S.; Hoy, M.; Wang, C. Safe Robot Navigation Among Moving and Steady Obstacles; Elsevier: Oxford, UK, 2015. [Google Scholar]
- Shen, C.; Zhang, Y.; Li, Z.; Gao, F.; Shen, S. Collaborative Air-Ground Target Searching in Complex Environments. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 Octomber 2017; p. 230. [Google Scholar]
- Delmerico, J.; Mueggler, E.; Nitsch, J.; Scaramuzza, D. Active autonomous aerial exploration for ground robot path planning. IEEE Robot. Autom. Lett. 2017, 2, 664–671. [Google Scholar] [CrossRef]
- Delmerico, J.; Giusti, A.; Mueggler, E.; Gambardella, L.M.; Scaramuzza, D. “On-the-spot training” for terrain classification in autonomous air-ground collaborative teams. In 2016 International Symposium on Experimental Robotics. ISER 2016. Springer Proceedings in Advanced Robotics; Kulić, D., Nakamura, Y., Khatib, O., Venture, G., Eds.; Springer: Cham, Switzerland, 2016; pp. 574–585. [Google Scholar]
- Pizzoli, M.; Forster, C.; Scaramuzza, D. REMODE: Probabilistic, monocular dense reconstruction in real time. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2609–2616. [Google Scholar]
- Hong, I.; Kuby, M.; Murray, A.T. A range-restricted recharging station coverage model for drone delivery service planning. Transp. Res. C Emerg. Technol. 2018, 90, 198–212. [Google Scholar] [CrossRef]
- Sundar, K.; Rathinam, S. Algorithms for Routing an Unmanned Aerial Vehicle in the Presence of Refueling Depots. IEEE Trans. Autom. Sci. Eng. 2014, 11, 287–294. [Google Scholar] [CrossRef]
- Luo, Z.; Liu, Z.; Shi, J. A two-echelon cooperated routing problem for a ground vehicle and its carried unmanned aerial vehicle. Sensors 2017, 17, 1144. [Google Scholar] [CrossRef]
- Yu, K.; Budhiraja, A.K.; Tokekar, P. Algorithms for Routing of Unmanned Aerial Vehicles with Mobile Recharging Stations and for Package Delivery. arXiv, 2017; arXiv:1704.00079. [Google Scholar]
- Liu, X.; Chen, Z.; Chen, W.; Xing, X. Multiple optical flow sensors aiding inertial systems for UAV navigation. In Proceedings of the 2016 UKACC 11th International Conference on Control (CONTROL), Belfast, UK, 31 August–2 September 2016; pp. 1–7. [Google Scholar]
- Rullán-Lara, J.L.; Salazar, S.; Lozano, R. Real-time localization of an UAV using Kalman filter and a Wireless Sensor Network. J. Intell. Robot. Syst. 2012, 65, 283–293. [Google Scholar] [CrossRef]
- Bohdanowicz, F.; Frey, H.; Funke, R.; Mosen, D.; Neumann, F.; Stojmenović, I. RSSI-based localization of a wireless sensor node with a flying robot. In Proceedings of the 30th Annual ACM Symposium on Applied Computing, Salamanca, Spain, 13–17 April 2015; pp. 708–715. [Google Scholar]
- Radak, J.; Baulig, L.; Bijak, D.; Schowalter, C.; Frey, H. Moving Towards Wireless Sensors using RSSI Measurements and Particle Filtering. In Proceedings of the 14th ACM Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, & Ubiquitous Networks, Miami, FL, USA, 21–25 November 2017; pp. 33–40. [Google Scholar]
- Li, H.; Savkin, A.V. Wireless Sensor Network Based Navigation of Micro Flying Robots in the Industrial Internet of Things. IEEE Trans. Ind. Inf. 2018, 14, 3524–3533. [Google Scholar] [CrossRef]
- Las Fargeas, J.; Kabamba, P.; Girard, A. Cooperative surveillance and pursuit using unmanned aerial vehicles and unattended ground sensors. Sensors 2015, 15, 1365–1388. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Savkin, A.V. An energy efficient approach for data collection in wireless sensor networks using public transportation vehicles. AEU Int. J. Electron. Commun. 2017, 75, 108–118. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Data Collection in Nonuniformly Deployed Wireless Sensor Networks by Public Transportation Vehicles. In Proceedings of the 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–4. [Google Scholar]
- Lagum, F.; Bor-Yaliniz, I.; Yanikomeroglu, H. Strategic Densification With UAV-BSs in Cellular Networks. IEEE Wirel. Commun. Lett. 2018, 7, 384–387. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Viable path planning for data collection robots in a sensing field with obstacles. Comput. Commun. 2017, 111, 84–96. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Optimal aircraft planar navigation in static threat environments. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2413–2426. [Google Scholar] [CrossRef]
- Primatesta, S.; Guglieri, G.; Rizzo, A. A Risk-Aware Path Planning Strategy for UAVs in Urban Environments. J. Intell. Robot. Syst. 2018, 1–15. [Google Scholar] [CrossRef]
- Yin, C.; Xiao, Z.; Cao, X.; Xi, X.; Yang, P.; Wu, D. Offline and online search: UAV multiobjective path planning under dynamic urban environment. IEEE Internet Things J. 2018, 5, 546–558. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. The problem of minimum risk path planning for flying robots in dangerous environments. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 5404–5408. [Google Scholar]
- Thanh, H.L.N.N.; Phi, N.N.; Hong, S.K. Simple nonlinear control of quadcopter for collision avoidance based on geometric approach in static environment. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Hong, S.K. Completion of Collision Avoidance Control Algorithm for Multicopters Based on Geometrical Constraints. IEEE Access 2018, 6, 27111–27126. [Google Scholar] [CrossRef]
- Elmokadem, T. A 3D Reactive Collision Free Navigation Strategy for Nonholonomic Mobile Robots. In Proceedings of the 2018 IEEE The 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 4661–4666. [Google Scholar]
- Yang, X.; Alvarez, L.M.; Bruggemann, T. A 3D collision avoidance strategy for UAVs in a non-cooperative environment. J. Intell. Robot. Syst. 2013, 70, 315–327. [Google Scholar] [CrossRef]
- Wang, C.; Savkin, A.V.; Garratt, M. A strategy for safe 3D navigation of non-holonomic robots among moving obstacles. Robotica 2018, 36, 275–297. [Google Scholar] [CrossRef]
- Cheng, T.M.; Savkin, A.V. Decentralized control for mobile robotic sensor network self-deployment: Barrier and sweep coverage problems. Robotica 2011, 29, 283–294. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Approach | FR Number | Dimension | Proactive or Reactive | Density, Location, or Distance-Based | Remark |
|---|---|---|---|---|---|
| [30] | Single | 1D | Proactive | Location | Altitude optimization for coverage area |
| [52] | Single | 3D | Proactive | Location | Minimizing transmitting power |
| [38] | Single | 3D | Proactive | Location | Minimizing transmitting power |
| [39] | Single | 3D | Proactive | Location | Maximizing covered user number |
| [43] | Single | 2D | Reactive | Location | Tracking the center of users |
| [53] | Single | 2D | Proactive | Location | Prolong WSN network lifetime |
| [25] | Multiple | 2D | Proactive | Location | Minimizing robot number |
| [32] | Multiple | 2D | Proactive | Density | Maximizing covered user number |
| [6] | Multiple | 2D | Proactive | Density | Interference management |
| [37] | Multiple | 2D | Proactive | Location | Recharge sensor nodes in cycle |
| [50] | Multiple | 3D | Proactive | Location | Minimizing FR number |
| [51] | Multiple | 3D | Proactive | Location | Minimizing FR number, maximizing data rate |
| [42] | Multiple | 2D | Proactive | Density | Neural-based cost function |
| [31] | Multiple | 2D | Proactive | Density | Decentralized robot-user distance minimization; connectivity |
| [40] | Multiple | 2D | Proactive | Location | K-means clustering |
| [33] | Multiple | 3D | Proactive | Location | Minimizing FR number; connectivity |
| [7] | Multiple | 3D | Reactive | Location | Minimizing FR number; energy constrained |
| [44] | Multiple | 2D | Reactive | Location | Exhaustive search moving direction |
| [48] | Multiple | 2D | Reactive | Distance | Move towards weighted centers |
| [49] | Multiple | 2D | Reactive | Location | Navigation based on virtual force |
| [55] | Single | 2D | Proactive | Location | Selection charging node and sink node |
| [56] | Multiple | 2D | Proactive | Location | Maximization of data collection utility |
| [57] | Single | 2D | Proactive | Location | Varying energy consumption rates |
| [58] | Multiple | 2D | Proactive | Location | Charging routes and sensor association |
| [26] | Multiple | 3D | Proactive | Location | Minimizing FR number |
| Approach | Task | Collaboration Type |
|---|---|---|
| [71] | Target searching using a ground robot | FRs-ground robots |
| [72,73,74] | Target searching using a ground robot team | FRs-ground robots |
| [75,76,77] | Target searching using FRs | FRs-FRs |
| [81,82,83,84,85,86] | Reactive navigation for ground robots | FRs-ground robots |
| [89,90] | Flying-ground robotic search-and-rescue team | FRs-ground robots |
| [60,95,96] | Field inspection and parcel delivery with charging stations | FRs-ground robots |
| [98] | Localization of FRs by a WSN | FRs-WSN |
| [99,100] | FR navigation based on RSSI in WSNs | FRs-WSN |
| [101,102] | FR navigation by sensory information | FRs-WSN |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Savkin, A.V. Towards the Internet of Flying Robots: A Survey. Sensors 2018, 18, 4038. https://doi.org/10.3390/s18114038
Huang H, Savkin AV. Towards the Internet of Flying Robots: A Survey. Sensors. 2018; 18(11):4038. https://doi.org/10.3390/s18114038
Chicago/Turabian StyleHuang, Hailong, and Andrey V. Savkin. 2018. "Towards the Internet of Flying Robots: A Survey" Sensors 18, no. 11: 4038. https://doi.org/10.3390/s18114038
APA StyleHuang, H., & Savkin, A. V. (2018). Towards the Internet of Flying Robots: A Survey. Sensors, 18(11), 4038. https://doi.org/10.3390/s18114038