Quaternion-Based Local Frame Alignment between an Inertial Measurement Unit and a Motion Capture System


Abstract
:1. Introduction
2. Related Works
3. Method
3.1. Alignment Procedure
3.2. Validation Using Simulated Data
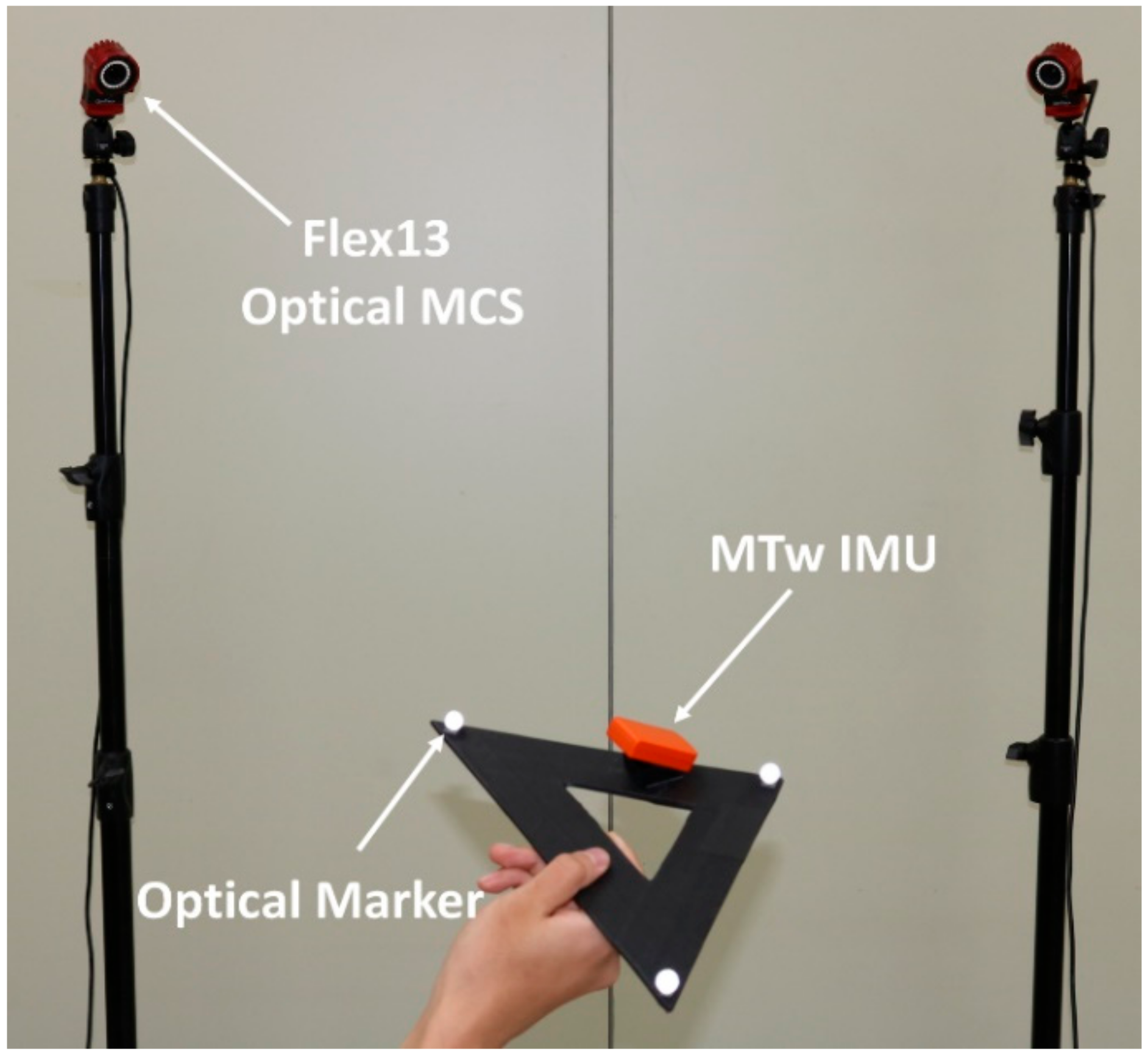
3.3. Validation Using Experimental Data
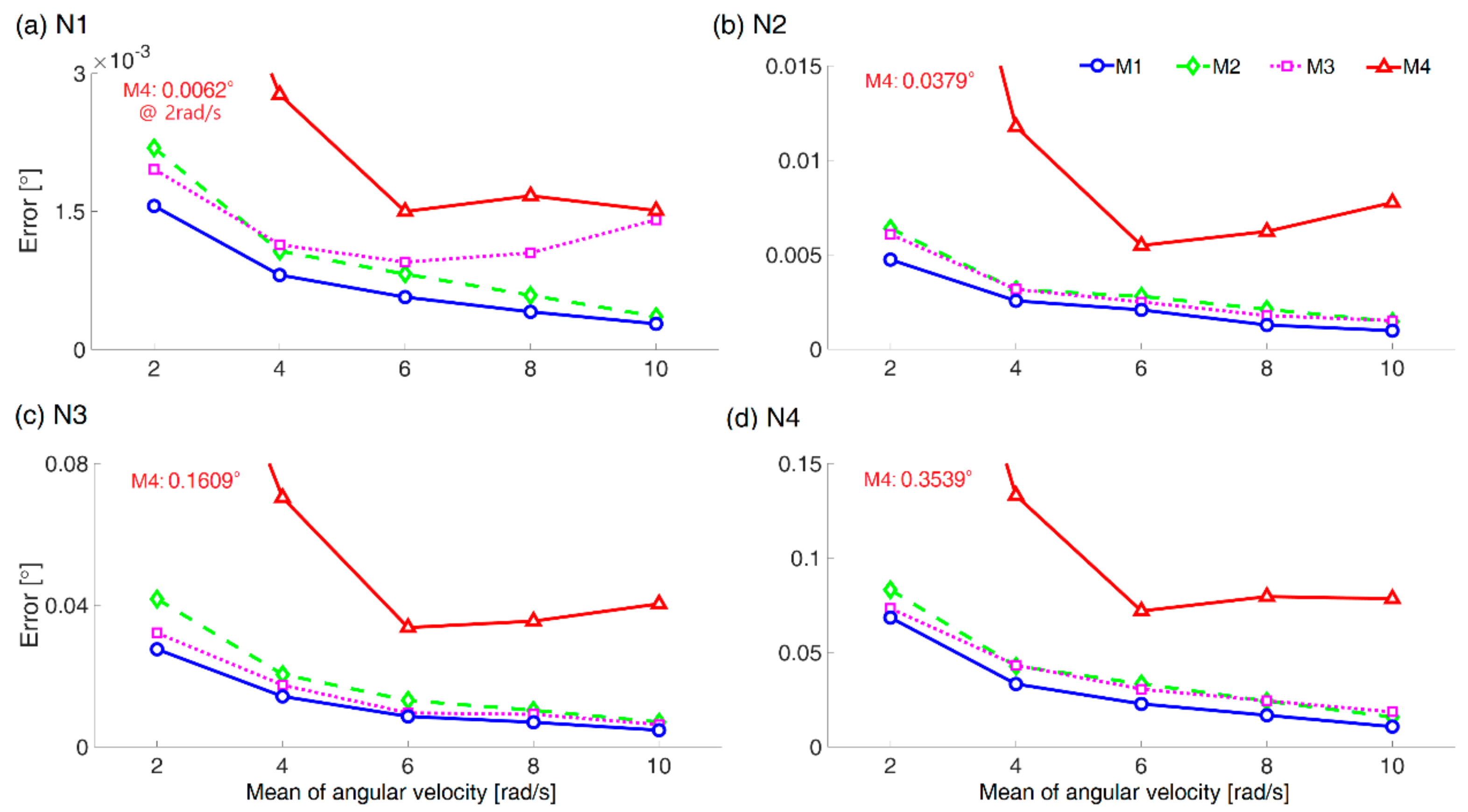
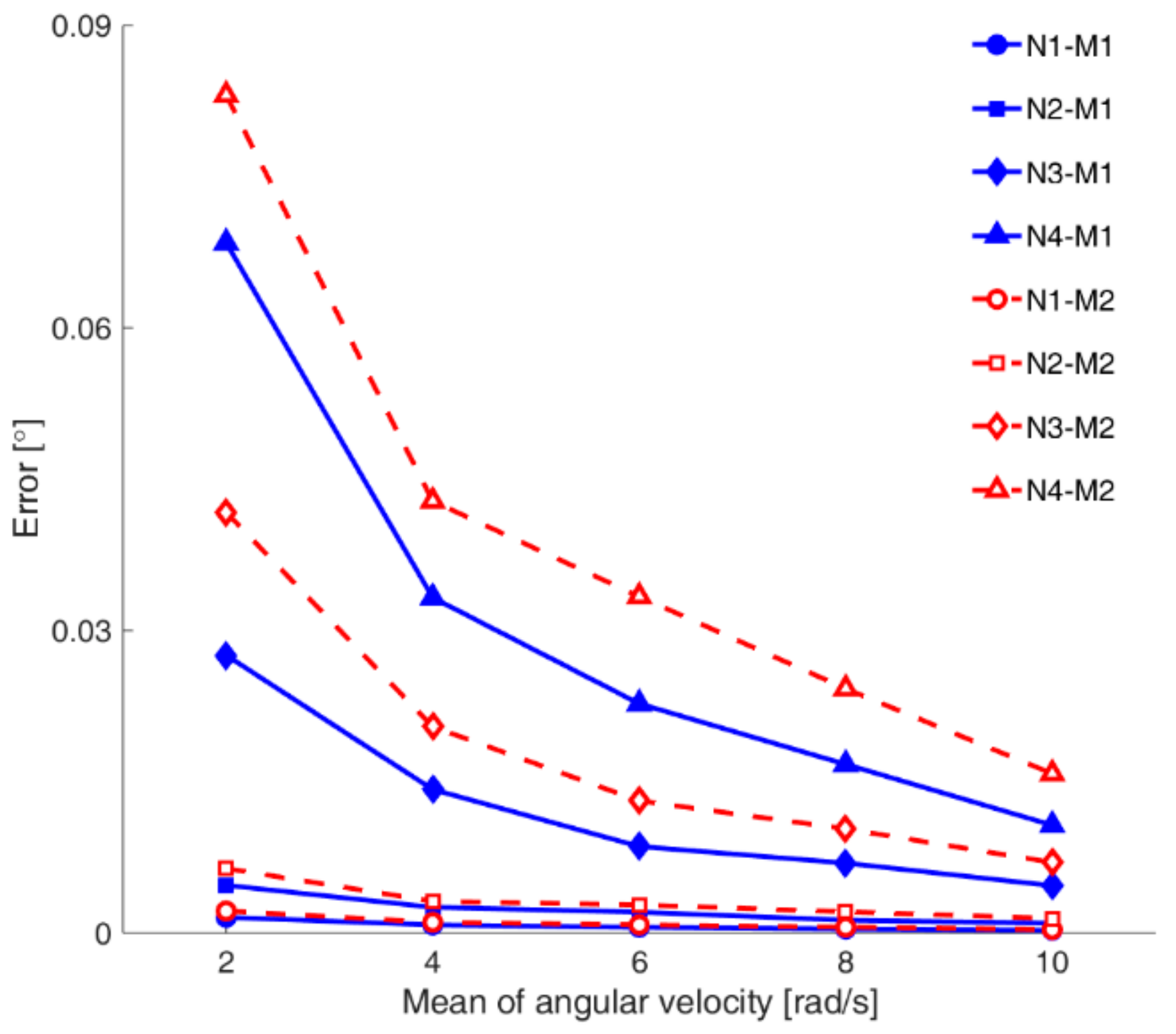
4. Results
5. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of motion tracking methods based on inertial sensors: A focus on upper limb human motion. Sensors 2017, 17, 1257. [Google Scholar] [CrossRef] [PubMed]
- Miezal, M.; Taetz, B.; Bleser, G. On inertial body tracking in the presence of model calibration errors. Sensors 2016, 16, 1132. [Google Scholar] [CrossRef] [PubMed]
- Seo, K.; Oh, S.; Park, Y.; Park, S.H.; Suh, J.H. Human motion reconstruction based on inertial motion sensors. In Proceedings of the 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Incheon, Korea, 23–26 November 2011; pp. 386–389. [Google Scholar]
- Cutti, A.G.; Ferrari, A.; Garofalo, P.; Raggi, M.; Cappello, A.; Ferrari, A. ‘Outwalk’: A protocol for clinical gait analysis based on inertial and magnetic sensors. Med. Biol. Eng. Comput. 2010, 48, 17–25. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.K.; Park, E.J. 3D spinal motion analysis during staircase walking using an ambulatory inertial and magnetic sensing system. Med. Biol. Eng. Comput. 2011, 49, 755–764. [Google Scholar] [CrossRef] [PubMed]
- Stollenwerk, K.; Müllers, J.; Müller, J.; Hinkenjann, A.; Krüger, B. Evaluating an accelerometer-based system for spine shape monitoring. In Proceedings of the 18th International Conference on Computational Science and Its Applications–ICCSA 2018, Melbourne, VIC, Australia, 2–5 July 2018; pp. 740–756. [Google Scholar]
- Riaz, Q.; Tao, G.; Krüger, B.; Weber, A. Motion reconstruction using very few accelerometers and ground contacts. Graph. Models 2015, 79, 23–38. [Google Scholar] [CrossRef]
- Tautges, J.; Zinke, A.; Krüger, B.; Baumann, J.; Weber, A.; Helten, T.; Müller, M.; Seidel, H.P.; Eberhardt, B. Motion reconstruction using sparse accelerometer data. ACM Trans. Graph. 2011, 30, 1–12. [Google Scholar] [CrossRef]
- Numaguchi, N.; Nakazawa, A.; Shiratori, T.; Hodgins, J.K. A puppet interface for retrieval of motion capture data. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, Vancouver, BC, Canada, 5–7 August 2011; Eurographics Association: Aire-la-Ville, Switzerland, 2011; pp. 157–166. [Google Scholar]
- Mousas, C. Full-body locomotion reconstruction of virtual characters using a single inertial measurement unit. Sensors 2017, 17, 2589. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; He, F.; Cai, X.; Chen, X.; Chen, Z. Performance-based control interfaces using mixture of factor analyzers. Vis. Comput. 2011, 27, 595–603. [Google Scholar] [CrossRef]
- Liu, H.; Wei, X.; Chai, J.; Ha, I.; Rhee, T. Realtime human motion control with a small number of inertial sensors. In Proceedings of the ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, San Francisco, CA, USA, 18–20 February 2011; pp. 133–140. [Google Scholar]
- D’Alessandro, N.; Tilmanne, J.; Astrinaki, M.; Hueber, T.; Dall, R.; Ravet, T.; Moinet, A.; Cakmak, H.; Babacan, O.; Barbulescu, A.; et al. Reactive statistical mapping: Towards the sketching of performative control with data. In IFIP Advances in Information and Communication Technology (AICT); Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Lee, J.K.; Park, E.J. Minimum-order Kalman filter with vector selector for accurate estimation of human body orientation. IEEE Trans. Robot. 2009, 25, 1196–1201. [Google Scholar]
- Lee, J.K.; Park, E.J.; Robinovitch, S.N. Estimation of attitude and external acceleration using inertial sensor measurement during various dynamic conditions. IEEE Trans. Instrum. Meas. 2012, 61, 2262–2273. [Google Scholar] [CrossRef] [PubMed]
- Seel, T.; Raisch, J.; Schauer, T. IMU-based joint angle measurement for gait analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [PubMed]
- Müller, B.; Ilg, W.; Giese, M.A.; Ludolph, N. Validation of enhanced Kinect sensor based motion capturing for gait assessment. PLoS ONE 2017, 12, e0175813. [Google Scholar] [CrossRef] [PubMed]
- Flerona, M.K.; Ubbesena, N.C.H.; Battistellaa, F.; Dejtiara, D.L.; Oliveirab, A.S. Accuracy between optical and inertial motion capture systems for assessing trunk speed during preferred gait and transition periods. Sports Biomech. 2018, 12, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Xsens Technologies. MTw User Manual and Technical Documentation; Xsens: Enschede, The Netherlands, 2007. [Google Scholar]
- De Vries, W.H.; Veeger, H.E.; Baten, C.T.; van der Helm, F.C. Magnetic distortion in motion labs, implications for validating inertial magnetic sensors. Gait Posture 2009, 29, 535–541. [Google Scholar] [CrossRef] [PubMed]
- Chardonnens, J.; Favre, J.; Aminian, K. An effortless procedure to align the local frame of an inertial measurement unit to the local frame of another motion capture system. J. Biomech. 2012, 45, 2297–2300. [Google Scholar] [CrossRef] [PubMed]
- Mecheri, H.; Robert-Lachaine, X.; Larue, C.; Plamondon, A. Evaluation of eight methods for aligning orientation of two coordinate systems. J. Biomech. Eng. 2016, 138, 084501. [Google Scholar] [CrossRef] [PubMed]
- Press, W.H.; Flannery, B.P.; Teukoslky, S.A.; Vetterling, W.T. Numerical Recipes; Cambridge University Press: Cambridge, UK, 2007; p. 902. [Google Scholar]
- Tsai, R.Y.; Lenz, R.K. Real time versatile robotics hand/eye calibration using 3D machine vision. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 24–29 April 1988; pp. 554–561. [Google Scholar]
- Park, F.C.; Martin, B.J. Robot sensor calibration: Solving AX=XB on the Euclidean croup. IEEE Trans. Rob. Autom. 1994, 10, 717–721. [Google Scholar] [CrossRef]
- Horaud, R.; Dornaika, F. Hand-eye calibration. Int. J. Rob. Res. 1995, 14, 195–210. [Google Scholar] [CrossRef]
- Chou, J.C.K.; Kamel, M. Quaternions approach to solve the kinematic equation of rotation, AaAx=AxAb, of a sensor-mounted robot manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 24–29 April 1988; pp. 656–662. [Google Scholar]
- Liang, R.; Mao, J. Hand-eye calibration with a new linear decomposition algorithm. J. Zhejiang Univ. 2008, 9, 1363–1368. [Google Scholar] [CrossRef]
- Shiu, Y.C.; Ahmad, S. Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations. IEEE Trans. Rob. Autom. 1989, 5, 16–29. [Google Scholar] [CrossRef]
- Paulich, M.; Schepers, M.; Rudigkeit, N.; Bellusci, G. Xsens MTw Awinda: Miniature Wireless Inertial-Magnetic Motion Tracker for Highly Accurate 3D Kinematic Applications; Xsens: Enschede, The Netherlands, 2018. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| Method | Representation | Solver | Concept | Reference |
|---|---|---|---|---|
| M1 | Quaternion | fsolve | Angular velocity transformation | Proposed |
| M2 | DCM | Pseudoinverse | Angular velocity transformation | [20] |
| M3 | DCM | fsolve | Angular velocity transformation | Modified from [20] |
| M4 | DCM | fsolve | Angle transformation | [21] |
| N1 | N2 | ||||||||
| M1 | M2 | M3 | M4 | M1 | M2 | M3 | M4 | ||
| T1 | 1.56 (0.62) | 2.19 (0.90) | 1.96 (0.83) | 6.23 (4.18) | T1 | 4.74 (2.83) | 6.40 (3.58) | 6.08 (3.07) | 37.87 (33.07) |
| T2 | 0.81 (0.50) | 1.07 (0.50) | 1.14 (0.59) | 2.77 (1.81) | T2 | 2.56 (0.91) | 3.15 (1.59) | 3.17 (1.56) | 11.78 (8.54) |
| T3 | 0.57 (0.41) | 0.82 (0.41) | 0.95 (0.51) | 1.50 (0.78) | T3 | 2.08 (0.80) | 2.80 (0.99) | 2.50 (1.22) | 5.49 (2.59) |
| T4 | 0.41 (0.26) | 0.59 (0.32) | 1.05 (0.77) | 1.67 (0.82) | T4 | 1.28 (0.73) | 2.11 (0.91) | 1.78 (0.99) | 6.23 (2.49) |
| T5 | 0.28 (0.13) | 0.36 (0.19) | 1.41 (0.93) | 1.51 (0.94) | T5 | 0.98 (0.47) | 1.46 (0.95) | 1.51 (0.82) | 7.76 (7.43) |
| N3 | N4 | ||||||||
| M1 | M2 | M3 | M4 | M1 | M2 | M3 | M4 | ||
| T1 | 27.55 (11.95) | 41.72 (20.04) | 32.15 (13.72) | 160.90 (98.42) | T1 | 68.43 (30.59) | 83.07 (39.40) | 73.26 (36.50) | 353.92 (250.67) |
| T2 | 14.24 (5.89) | 20.46 (8.69) | 17.46 (7.63) | 70.37 (50.40) | T2 | 33.26 (11.55) | 42.83 (20.07) | 43.23 (19.72) | 133.06 (61.43) |
| T3 | 8.59 (4.39) | 13.11 (5.90) | 9.58 (4.61) | 33.68 (18.82) | T3 | 22.74 (9.28) | 33.37 (14.63) | 30.54 (13.37) | 71.93 (32.84) |
| T4 | 6.94 (3.28) | 10.33 (3.70) | 9.18 (5.05) | 35.50 (21.17) | T4 | 16.73 (8.08) | 24.23 (13.40) | 24.37 (15.57) | 79.54 (34.21) |
| T5 | 4.70 (2.94) | 7.00 (3.65) | 6.30 (3.50) | 40.38 (38.54) | T5 | 10.70 (5.50) | 15.81 (8.33) | 18.53 (10.90) | 78.38 (48.74) |
| M1 | M2 | M3 | M4 | |
|---|---|---|---|---|
| TS (relatively slow) | 215 (80) | 287 (103) | 343 (159) | 440 (132) |
| TF (relatively fast) | 168 (58) | 177 (63) | 197 (63) | 616 (364) |
| N1 | N2 | ||||||||
| M1 | M2 | M3 | M4 | M1 | M2 | M3 | M4 | ||
| T1 | 0.14 | 0.08 | 0.11 | 0.44 | T1 | 0.16 | 0.20 | 0.06 | 0.29 |
| T2 | 0.25 | 0.12 | 0.19 | 0.22 | T2 | 0.14 | 0.15 | 0.09 | 0.29 |
| T3 | 0.28 | 0.27 | 0.24 | 0.11 | T3 | 0.10 | 0.16 | 0.20 | 0.20 |
| T4 | 0.22 | 0.19 | 0.64 | 0.13 | T4 | 0.17 | 0.22 | 0.21 | 0.20 |
| T5 | 0.10 | 0.15 | 0.62 | 0.18 | T5 | 0.13 | 0.16 | 0.17 | 0.24 |
| N3 | N4 | ||||||||
| M1 | M2 | M3 | M4 | M1 | M2 | M3 | M4 | ||
| T1 | 0.15 | 0.13 | 0.17 | 0.21 | T1 | 0.15 | 0.12 | 0.25 | 0.12 |
| T2 | 0.13 | 0.11 | 0.12 | 0.24 | T2 | 0.13 | 0.17 | 0.13 | 0.14 |
| T3 | 0.18 | 0.10 | 0.15 | 0.25 | T3 | 0.16 | 0.22 | 0.13 | 0.13 |
| T4 | 0.19 | 0.19 | 0.20 | 0.29 | T4 | 0.14 | 0.18 | 0.20 | 0.16 |
| T5 | 0.26 | 0.25 | 0.12 | 0.14 | T5 | 0.18 | 0.23 | 0.27 | 0.15 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.K.; Jung, W.C. Quaternion-Based Local Frame Alignment between an Inertial Measurement Unit and a Motion Capture System. Sensors 2018, 18, 4003. https://doi.org/10.3390/s18114003
Lee JK, Jung WC. Quaternion-Based Local Frame Alignment between an Inertial Measurement Unit and a Motion Capture System. Sensors. 2018; 18(11):4003. https://doi.org/10.3390/s18114003
Chicago/Turabian StyleLee, Jung Keun, and Woo Chang Jung. 2018. "Quaternion-Based Local Frame Alignment between an Inertial Measurement Unit and a Motion Capture System" Sensors 18, no. 11: 4003. https://doi.org/10.3390/s18114003
APA StyleLee, J. K., & Jung, W. C. (2018). Quaternion-Based Local Frame Alignment between an Inertial Measurement Unit and a Motion Capture System. Sensors, 18(11), 4003. https://doi.org/10.3390/s18114003