Spin Rate Effects in a Micromachined Electrostatically Suspended Gyroscope



Abstract
1. Introduction
2. Description of Micromachined Electrostatically Suspended Gyroscope
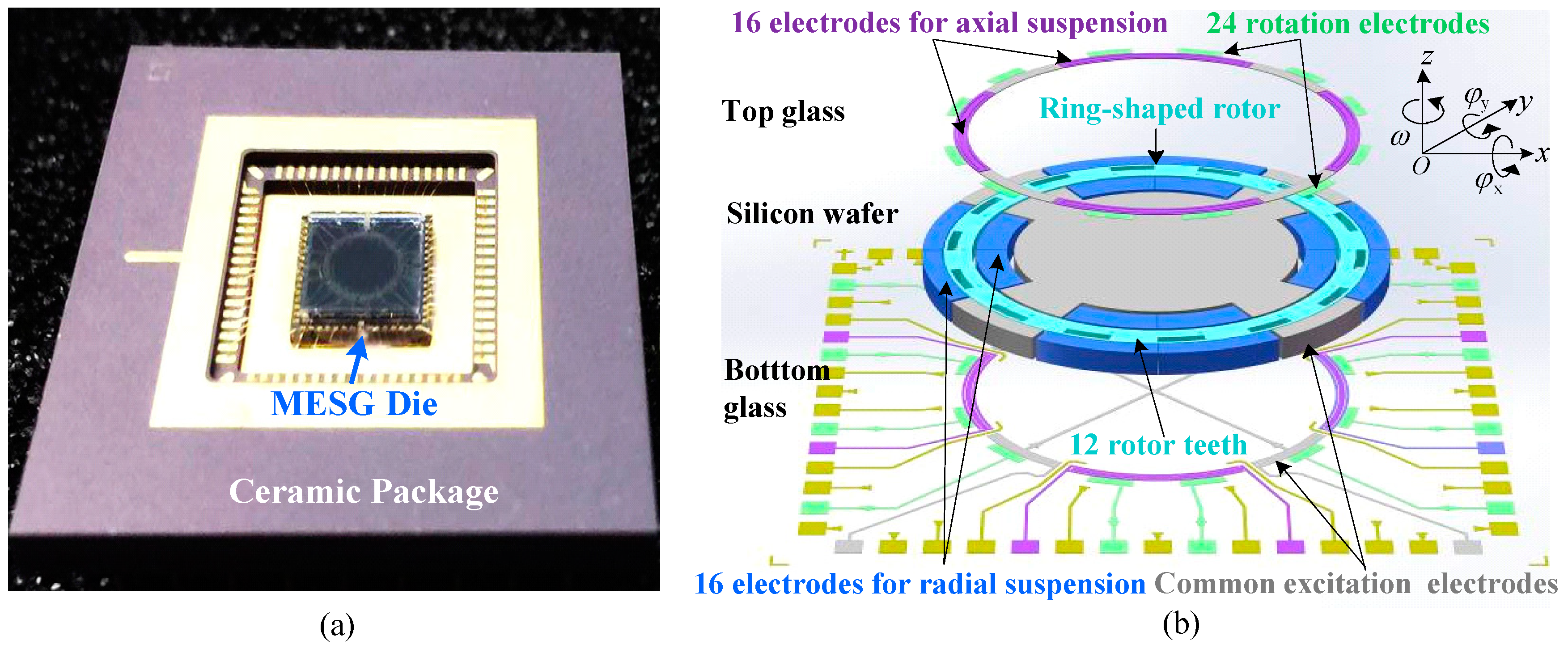
2.1. Gyroscope Structure
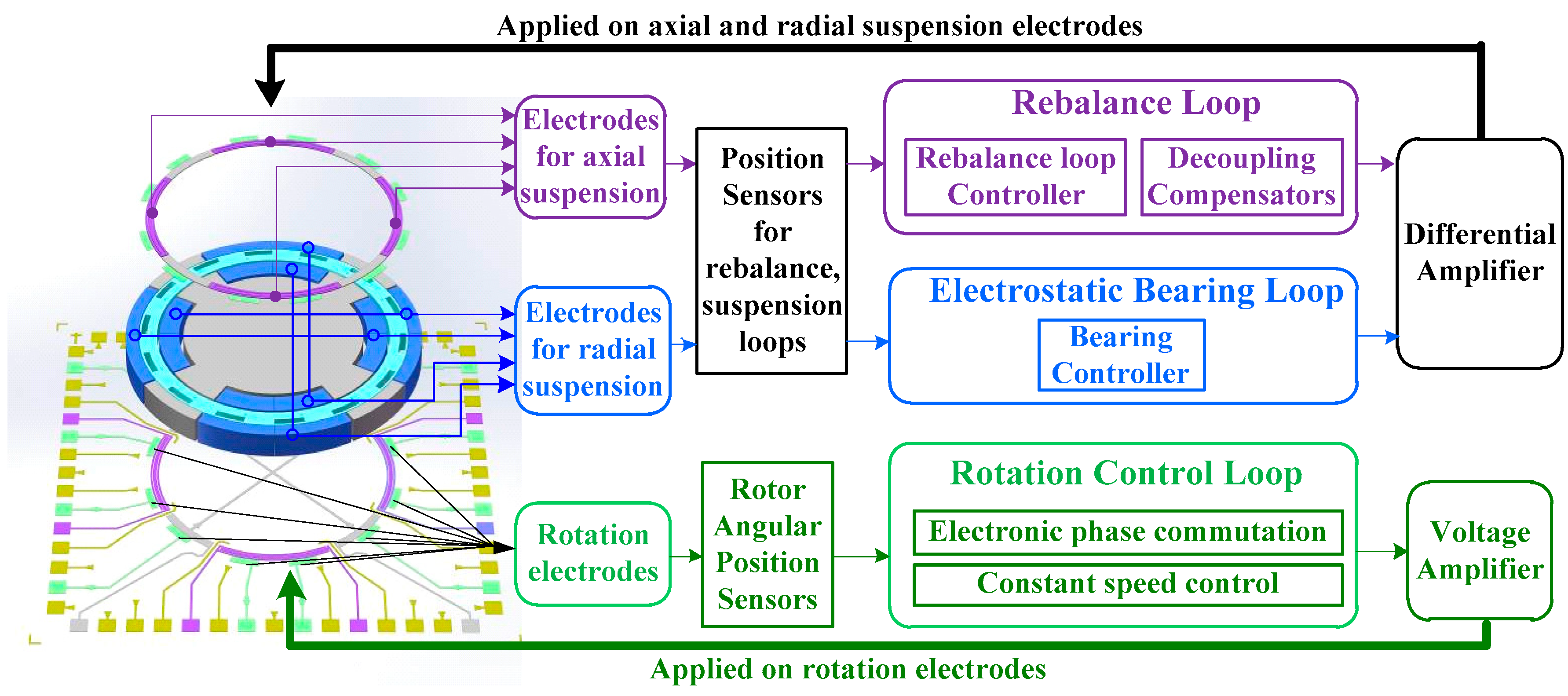
2.2. Operating Principle of MESG
2.3. Scale Factor and Measurement Range of MESG
2.4. Scale Factor Influenced by Spin Rate
2.5. Perturbed Torque of MESG
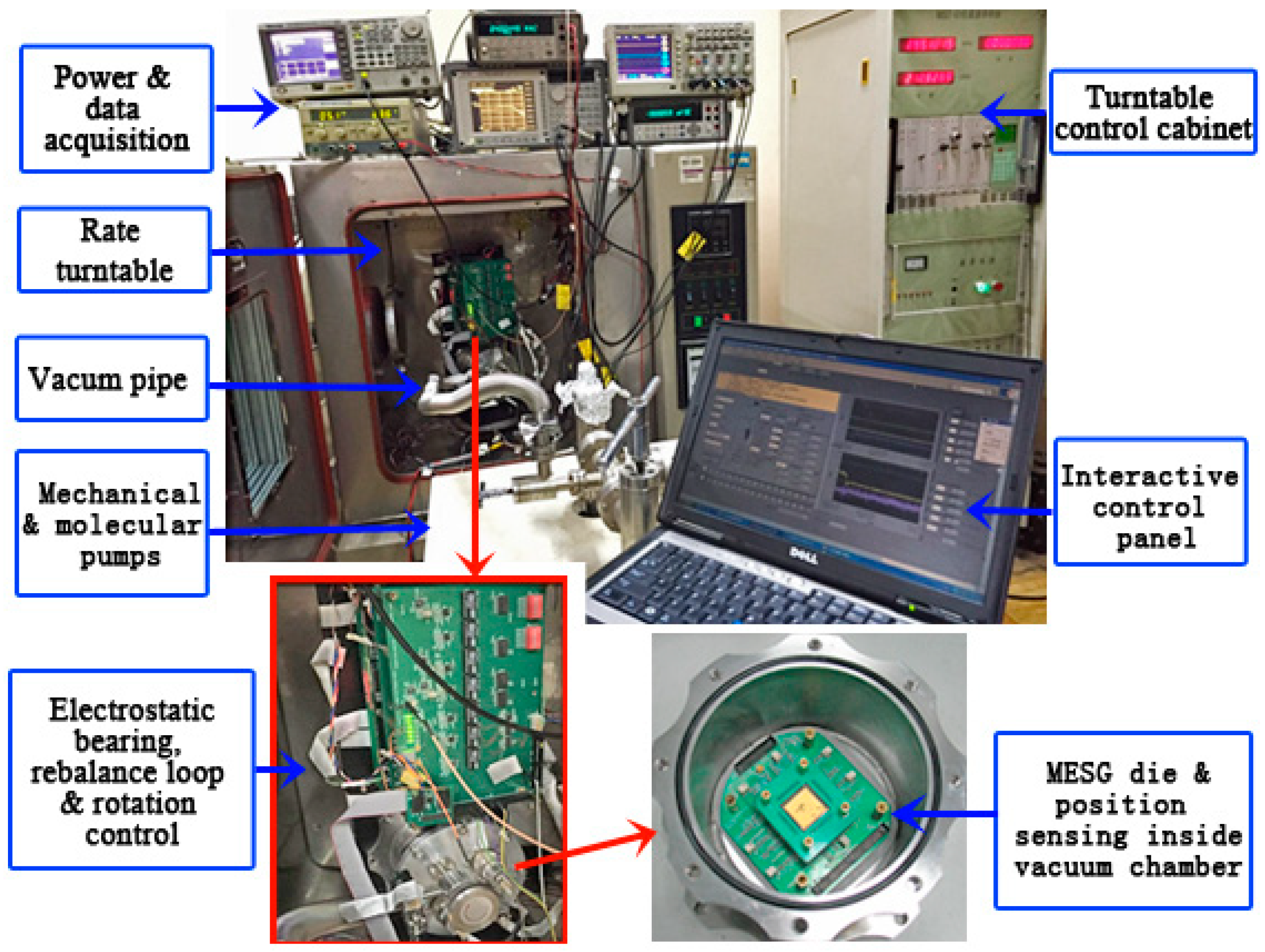
3. Experiment Results and Discussion
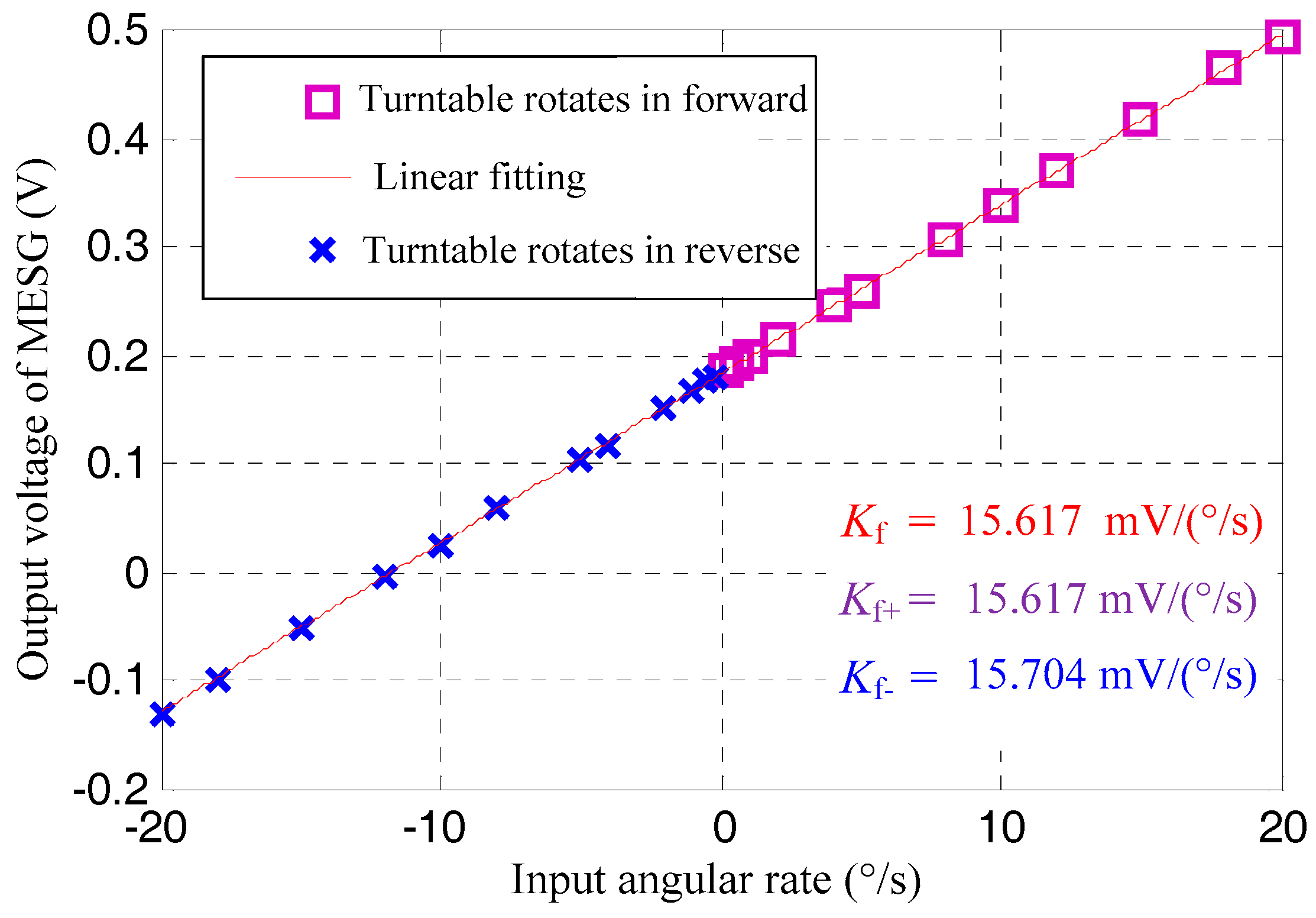
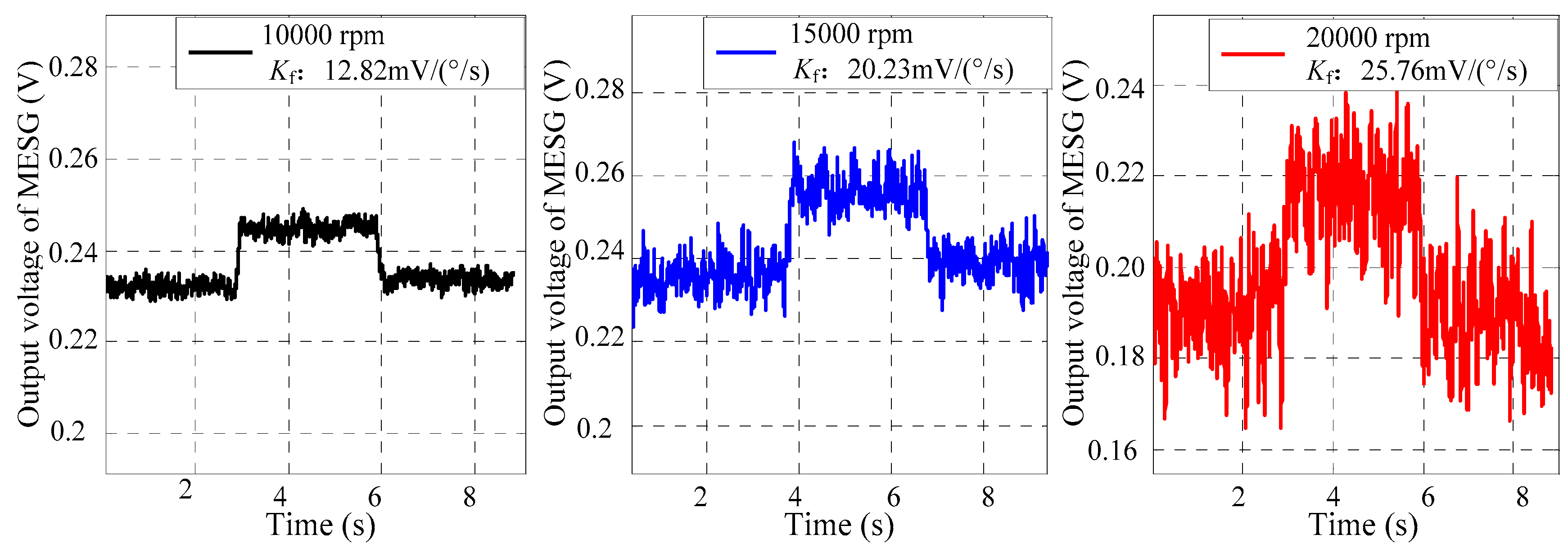
3.1. Scale Factor
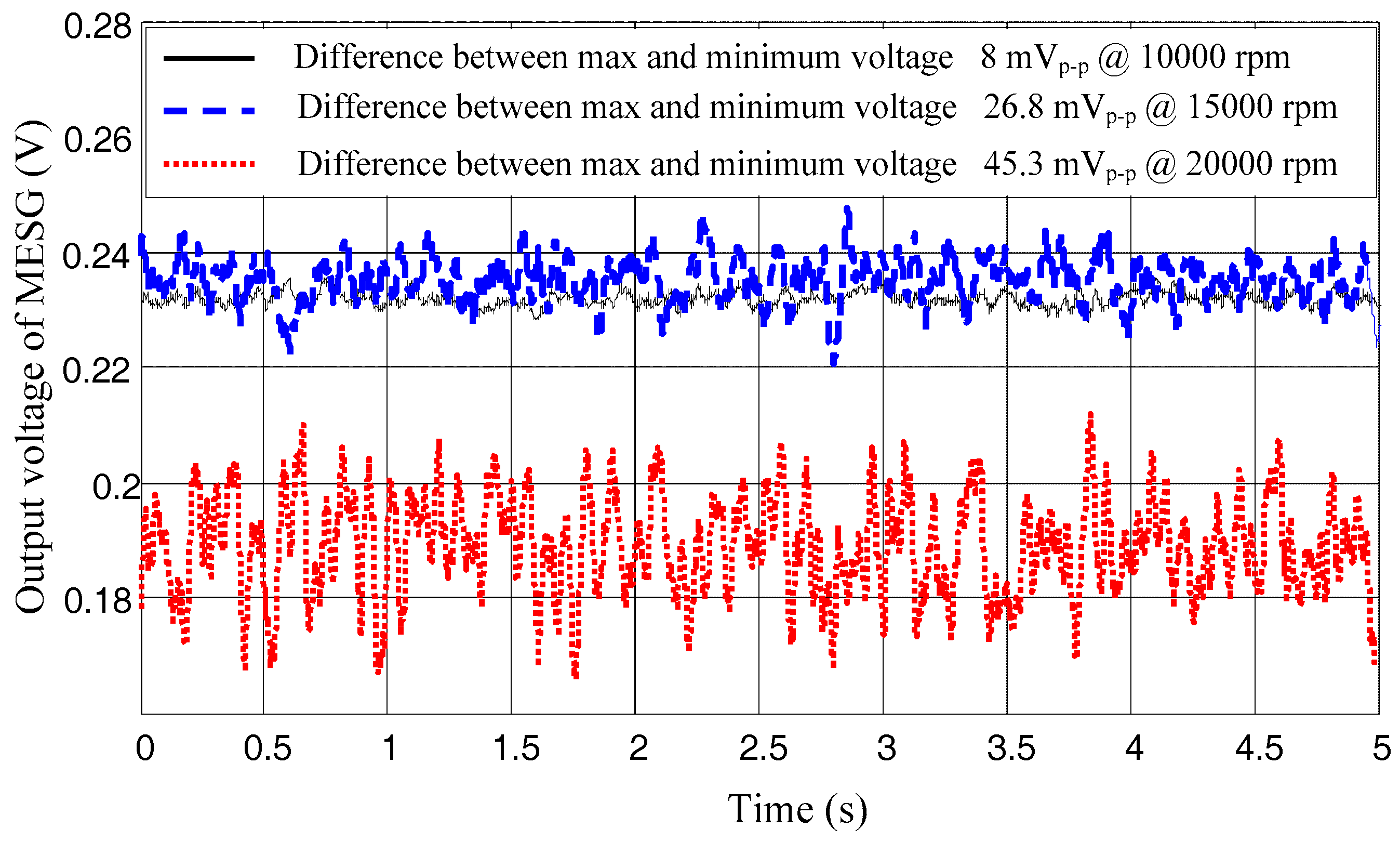
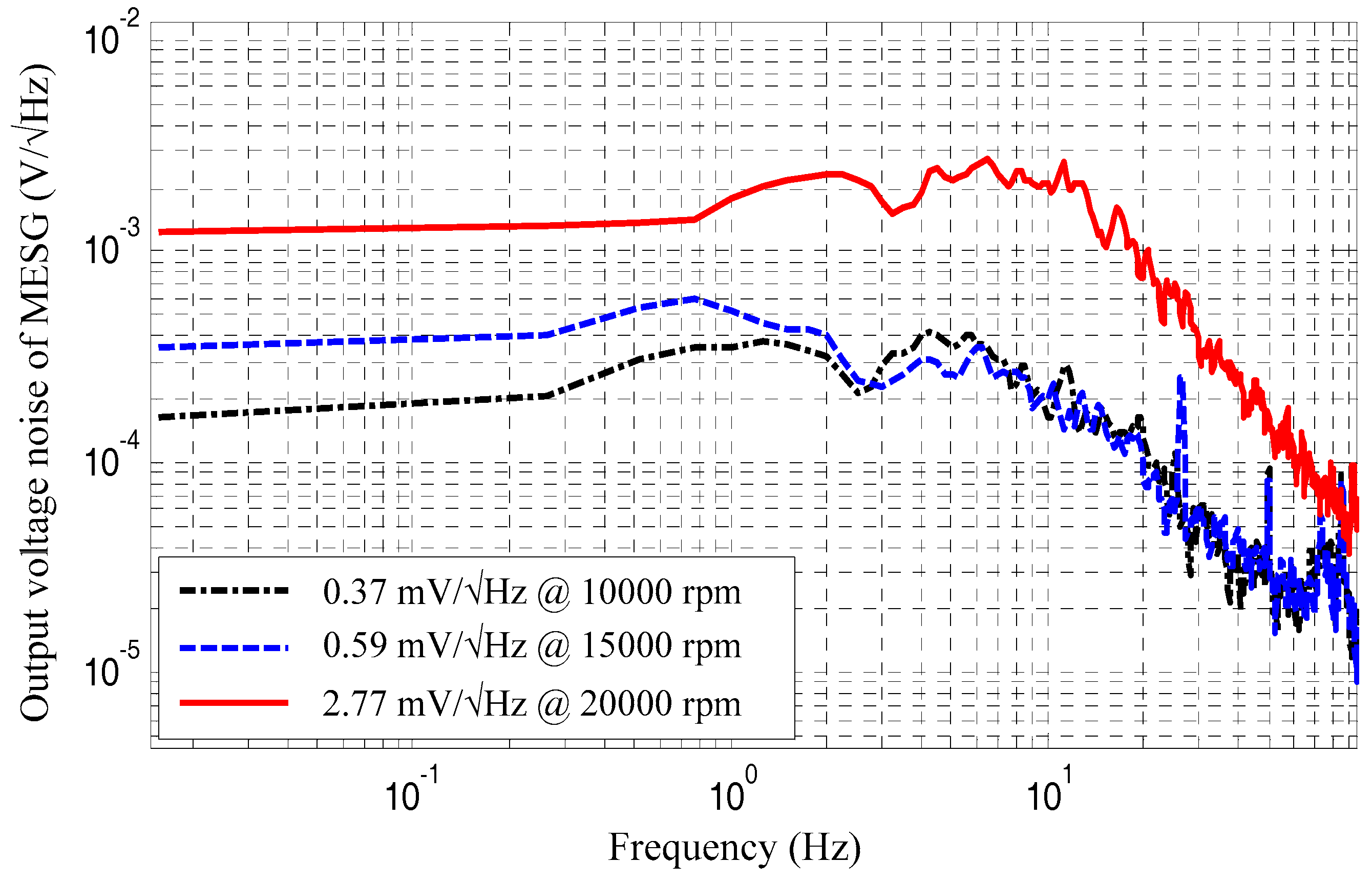
3.2. Resolution and Noise
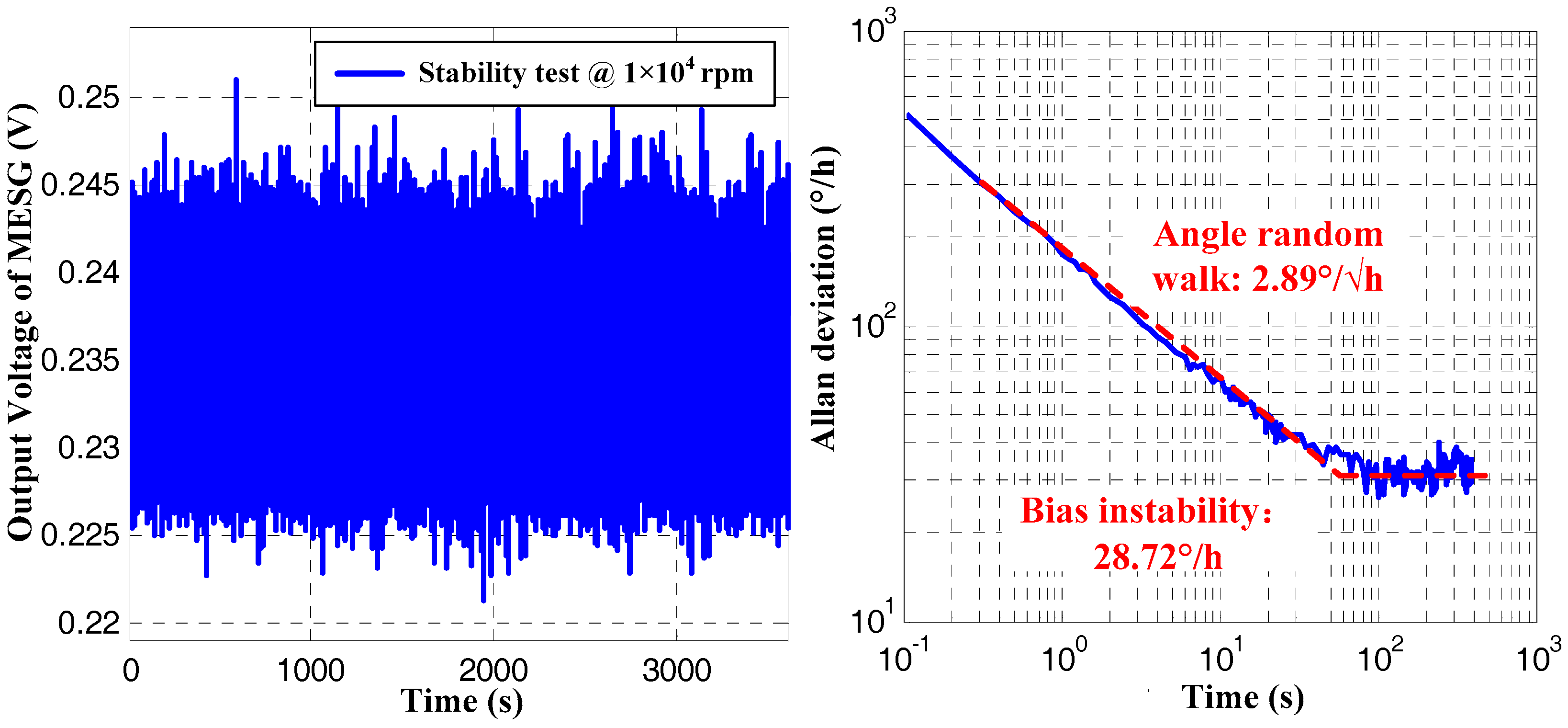
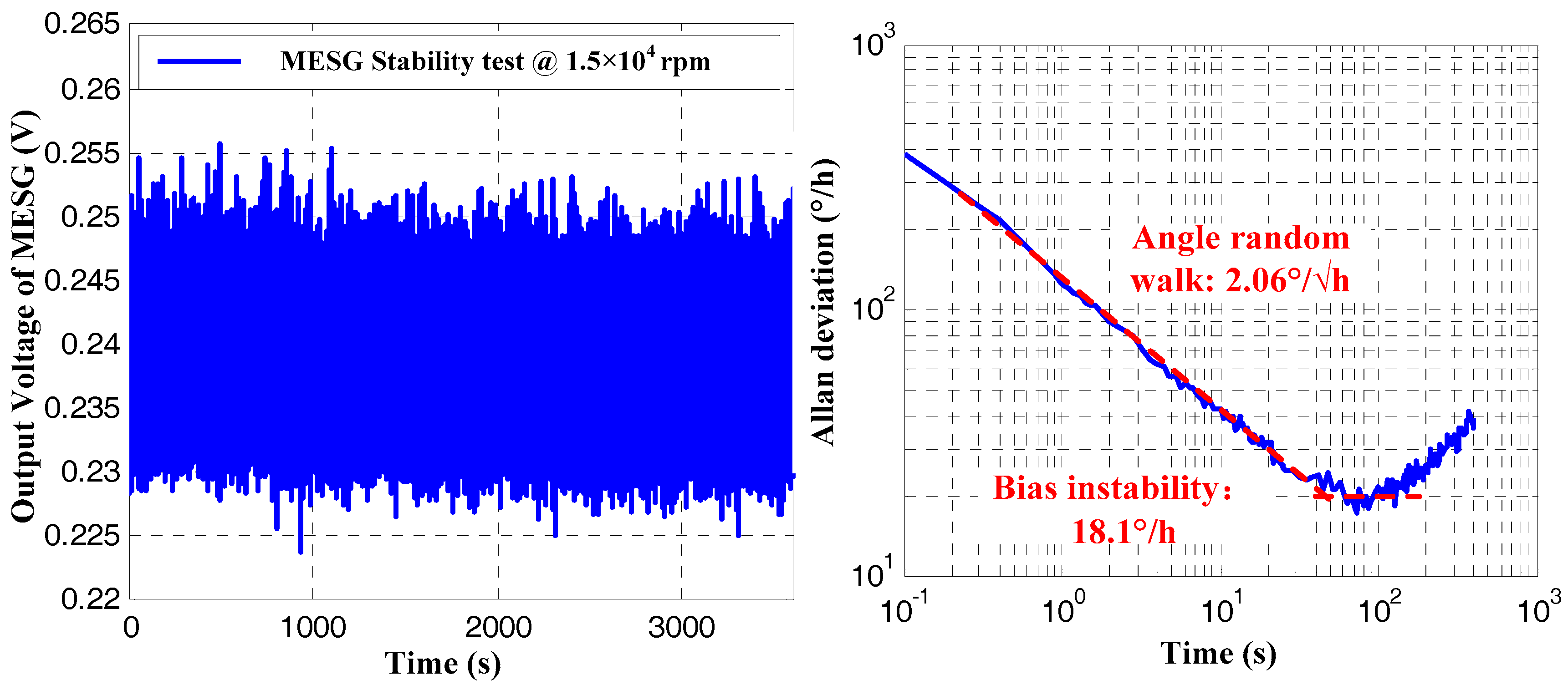
3.3. Bias Instability
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Craig, R.J.G. Theory of operation of a two-axis-rate gyro. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 722–731. [Google Scholar] [CrossRef]
- Craig, R.J.G. Theory of Operation of an Elastically Supported, Tuned Gyroscope. IEEE Trans. Aerosp. Electron. Syst 1972, AES-8, 280–288. [Google Scholar] [CrossRef]
- Scott, W.E.; D’Amico, W.P. Amplitude-dependent behaviour of a liquid-filled gyroscope. J. Fluid Mech. 1973, 60, 751–758. [Google Scholar] [CrossRef]
- Bencze, W.J.; Brumley, R.W.; Eglington, M.L.; Hipkins, D.N.; Holmes, T.J.; Parkinson, B.W.; Ohshima, Y.; Everitt, C.W.F. The Gravity Probe B electrostatic gyroscope suspension system (GSS). Class. Quantum Gravity 2015, 32, 224005. [Google Scholar] [CrossRef]
- Xia, D.; Yu, C.; Kong, L. The Development of Micromachined Gyroscope Structure and Circuitry Technology. Sensors 2014, 14, 1394–1473. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Zhang, W.; Chen, W.; Li, K.; Dai, F.; Cui, F.; Wu, X.; Ma, G.; Xiao, Q. The development of micro-gyroscope technology. J. Micromech. Microeng. 2009, 19, 113001. [Google Scholar] [CrossRef]
- Chen, D.; Liu, X.; Zhang, H.; Li, H.; Weng, R.; Li, L.; Rong, W.; Zhang, Z. A Rotational Gyroscope with a Water-Film Bearing Based on Magnetic Self-Restoring Effect. Sensors 2018, 18, 415. [Google Scholar] [CrossRef] [PubMed]
- Wong, C.; Zhang, X.; Jacobson, S.A.; Epstein, A.H. A self-acting gas thrust bearing for high-speed microrotors. J. Microelectromech. Syst. 2004, 13, 158–164. [Google Scholar] [CrossRef]
- Lu, Z.; Poletkin, K.; Hartogh, B.; Wallrabe, U.; Badilita, V. 3D micro-machined inductive contactless suspension: Testing and modeling. Sens. Actuators A Phys. 2014, 220, 134–143. [Google Scholar] [CrossRef]
- Han, F.; Wang, L.; Wu, Q.; Liu, Y. Performance of an active electric bearing for rotary micromotors. J. Micromech. Microeng. 2011, 21, 085027. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, W.; Zhao, X.; Wu, X.; Liu, W.; Huang, X.; Shao, S. The study of an electromagnetic levitating micromotor for application in a rotating gyroscope. Sens. Actuators A 2006, 132, 651–657. [Google Scholar] [CrossRef]
- Trimmer, W.S.N.; Gabriel, K.J. Design considerations for a practical electrostatic micro-motor. Sens. Actuators 1987, 11, 189–206. [Google Scholar] [CrossRef]
- Esashi, M. Micro/nano electro mechanical systems for practical applications. J. Phys. Conf. Ser. 2009, 187, 012001. [Google Scholar] [CrossRef]
- Fukuda, G.; Hayashi, S. The Basic Research for the New Compass System Using Latest MEMS. Int. J. Mar. Navig. Saf. Sea Transp. 2010, 4, 317–322. [Google Scholar]
- Murakoshi, T.; Endo, Y.; Fukatsu, K.; Nakamura, S.; Esashi, M. Electrostatically levitated ring-shaped rotational-gyro accelerometer. Jpn. J. Appl. Phys. 2003, 42, 2468–2472. [Google Scholar] [CrossRef]
- Damrongsak, B.; Kraft, M.; Rajgopal, S.; Mehregany, M. Design and fabrication of a micromachined electrostatically suspended gyroscope. Proc. Inst. Mech. Eng. C 2008, 222, 53–63. [Google Scholar] [CrossRef]
- Cui, F.; Liu, W.; Chen, W.; Zhang, W.; Wu, X.S. Hybrid microfabrication and 5-DOF levitation of micromachined electrostatically suspended gyroscope. Electron. Lett. 2011, 47, 976–978. [Google Scholar] [CrossRef]
- Kraft, M.; Damrongsak, B. Micromachined gyroscopes based on a rotating mechanically unconstrained proof mass. In Proceedings of the 2010 IEEE Sensors, Kona, HI, USA, 1–4 November 2010; pp. 23–28. [Google Scholar]
- Sun, B.; Wang, S.; Li, H.; He, X. Decoupling Control of Micromachined Spinning-Rotor Gyroscope with Electrostatic Suspension. Sensors 2016, 16, 1747. [Google Scholar] [CrossRef] [PubMed]
- Sun, B.; Han, F.; Li, L.; Wu, Q. Rotation Control and Characterization of High-Speed Variable-Capacitance Micromotor Supported on Electrostatic Bearing. IEEE Trans. Ind. Electron. 2016, 63, 4336–4345. [Google Scholar] [CrossRef]
- Poletkin, K.; Wallrabe, U. Static behavior of closed-loop micromachined levitated two-axis rate gyroscope. IEEE Sens. J. 2015, 15, 7001–7008. [Google Scholar] [CrossRef]
- Poletkin, K.V.; Korvink, J.G.; Badilita, V. Mechanical Thermal Noise in Micro-Machined Levitated Two-Axis Rate Gyroscopes. IEEE Sens. J. 2018, 18, 1390–1402. [Google Scholar] [CrossRef]
- Torti, R.P.; Gondhalekar, V.; Tran, H.; Selfors, B.; Bart, S.; Maxwell, B. Electrostatically suspended and sensed micromechanical rate gyroscope. In Proceedings of the SPIE’s International Symposium on Optical Engineering and Photonics in Aerospace Sensing, Orlando, FL, USA, 4–8 April 1994; Volume 2220, pp. 27–39. [Google Scholar]
- De Castro Junqueira, F.; de Barros, E.A. Development of a dynamically tuned gyroscope–DTG. In Proceedings of the ABCM Symposium Series in Mechatronics, São Paulo, SP, Brazil, 10–14 November 2004; Volume 1, pp. 470–478. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Spin Rate | 1 × 104 (rpm) | 1.2 × 104 (rpm) | 1.5 × 104 (rpm) | 2 × 104 (rpm) | ||||
|---|---|---|---|---|---|---|---|---|
| Theory | Measured | Theory | Measured | Theory | Measured | Theory | Measured | |
| Scale factor (mV/°/s) | 12.8 | 12.82 | 15.4 | 15.61 | 19.2 | 20.34 | 25.6 | 25.75 |
| Measurement range(°/s) | 553.76 | 553.8 | 461.5 | 454.63 | 369.2 | 350.96 | 276.88 | 275.6 |
| Rated Spin Rate (rpm) | 1 × 104 | 1.5 × 104 | 2 × 104 |
|---|---|---|---|
| P0 (Pa) | 9.1 × 10−3 | 8.7 × 10−3 | 7.2 × 10−3 |
| VR (V) | 4.2 | 5.4 | 10.2 |
| VR2 (V2) | 17.64 | 29.16 | 104.04 |
| Voltage noise (mV/√Hz) | 0.37 | 0.59 | 2.77 |
| VR2/17.64 (1) | 1 | 1.65 | 5.89 |
| Voltage noise/0.37 (1) | 1 | 1.59 | 7.48 |
| (Row5 − Row6)/Row6 | \ | −3.7% | 21.2% |
| Rated Spin Rate | 1 × 104 (rpm) | 1.2 × 104 (rpm) | 1.5 × 104 (rpm) | 2 × 104 (rpm) |
|---|---|---|---|---|
| Resolution (°/s) | 0.018 | 0.014 | 0.012 | 0.012 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Wang, S.; Tan, Y.; Liu, Y.; Han, F. Spin Rate Effects in a Micromachined Electrostatically Suspended Gyroscope. Sensors 2018, 18, 3901. https://doi.org/10.3390/s18113901
Sun B, Wang S, Tan Y, Liu Y, Han F. Spin Rate Effects in a Micromachined Electrostatically Suspended Gyroscope. Sensors. 2018; 18(11):3901. https://doi.org/10.3390/s18113901
Chicago/Turabian StyleSun, Boqian, Shunyue Wang, Yidong Tan, Yunfeng Liu, and Fengtian Han. 2018. "Spin Rate Effects in a Micromachined Electrostatically Suspended Gyroscope" Sensors 18, no. 11: 3901. https://doi.org/10.3390/s18113901
APA StyleSun, B., Wang, S., Tan, Y., Liu, Y., & Han, F. (2018). Spin Rate Effects in a Micromachined Electrostatically Suspended Gyroscope. Sensors, 18(11), 3901. https://doi.org/10.3390/s18113901