3.1. Accuracy Analysis of the Observed Ultra-Rapid Orbit
To serve real-time and near real-time users, the IGS began producing ultra-rapid-orbit products officially on November 2000, originally with updates every 12 h [
29]. The update cycle was reduced to every 6 h starting April 2004, the update comprising 24-h observed orbit and 24-h predicted orbit services. At present, GNSS users can acquire combined GPS and GLONASS ultra-rapid orbit with a 3-h latency, whereas iGMAS provides a four-system ultra-rapid orbit (including Galileo and BeiDou). To analyze the accuracy of the ultra-rapid orbit fully, the products from Wuhan University (WHU, iGMAS AC) [
30] and the German Research Center for Geosciences (GFZ, IGS AC) [
31] are taken as references to calculate the orbit residuals. One-month of ultra-rapid orbits from day of year (DOY) 168 to 197, 2017 of WHU were selected in the orbit accuracy analysis. The residuals between the observed parts of the ultra-rapid and the rapid orbits were extracted. The corresponding average 3D RMSs, listed in
Table 1, show that the accuracy of the observed ultra-rapid orbits decreases for all systems in the latter arcs of the observed parts, especially for the final 3 h. Moreover, note that the results of the 3D RMSs are calculated based on data from all satellites of each system for which the low accuracy of the observed parts is not suitable for all satellites involved based on the experiments.
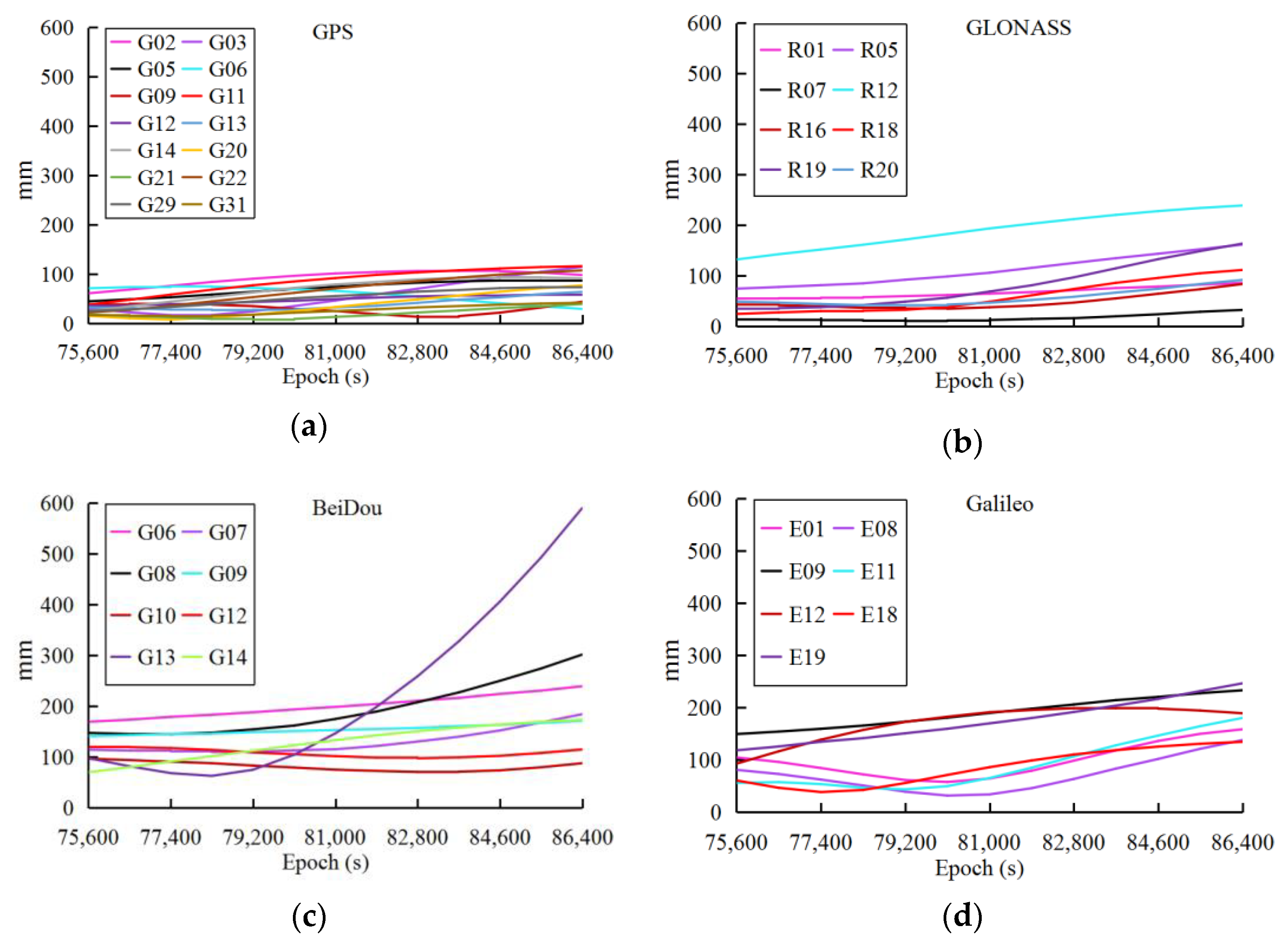
To describe the orbit errors in more detail, the ultra-rapid orbit from WHU (whu19540_00.sp3, DOY 168, 2017) is set as an example. Corresponding to the ultra-rapid orbit of WHU, the GFZ rapid orbit (gbm19536.sp3) is selected as a reference to compare the orbit accuracy between different ACs.
Figure 1 plots the 3D RMSs of orbits from the four satellite systems (GPS/GLONASS/Galileo/BeiDou) between WHU and GFZ during the last 3-h period, in which only the satellites with significant reduction in accuracy are extracted to highlight the trend.
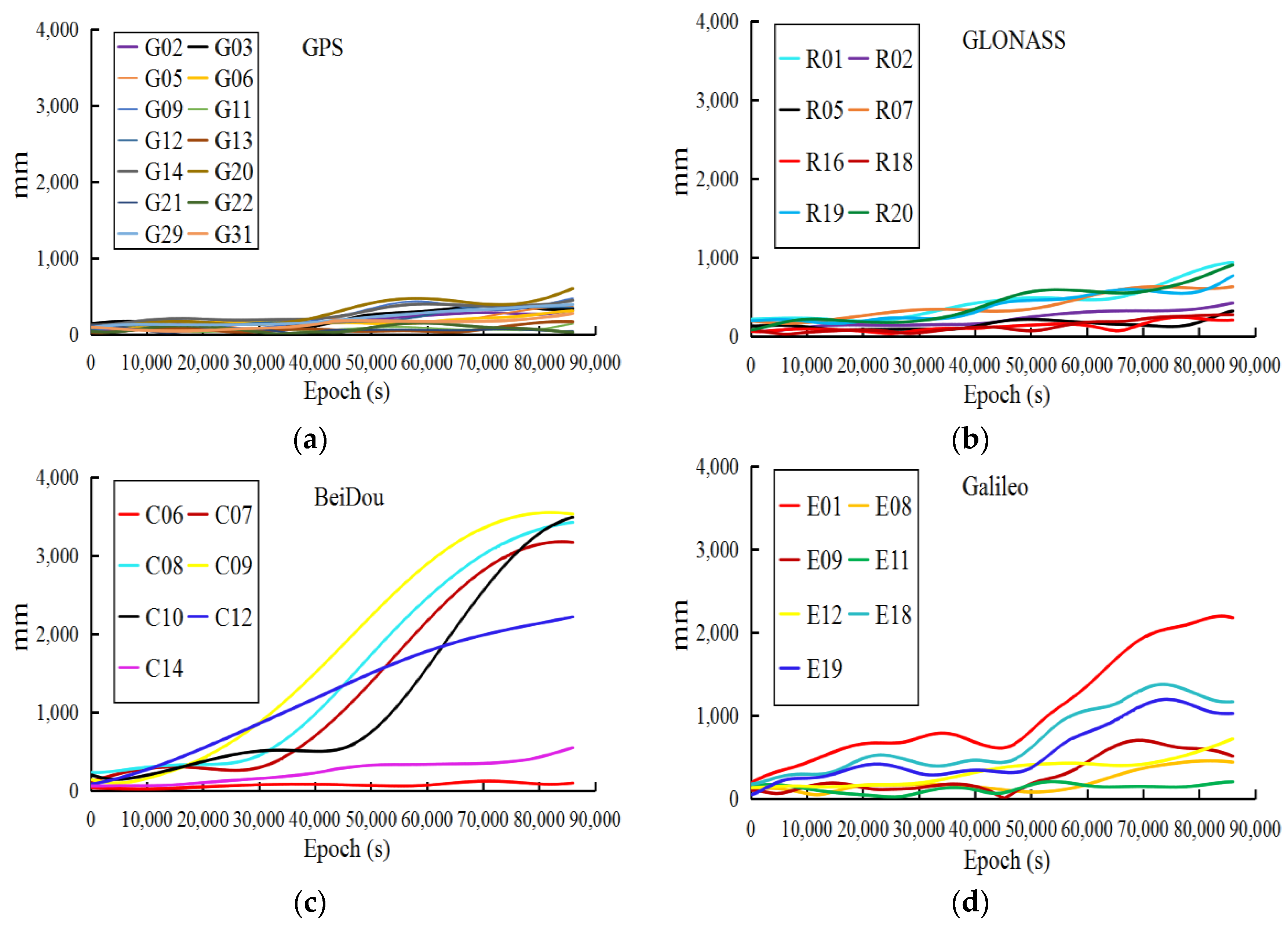
In addition, to describe the impact of low accuracy of the observed part on the predicted orbit, the last 1-h of observed orbits of WHU are extracted to predict the 24-h multi-GNSS orbits. Similarly, the WHU rapid orbits are set as references to analyze the accuracy of predicted orbits, the 3D RMSs of which are listed in
Table 2 at 2-h intervals during the first 6 h. The accuracy of the predicted orbits is also verified by one-month experiments. To show more detail concerning the accuracy of the predicted orbits based on the observed parts, WHU (whu19540_00.sp3) is extracted to fit the initial orbit and predict the 24-h multi-GNSS orbit. Next, the GFZ rapid orbit (gbm19540.sp3) is set as a reference to analyze the accuracy of the predicted orbit (see
Figure 2).
From the accuracy of the observed and predicted parts of the ultra-rapid orbit, we conclude: (1) the accuracy of the observed ultra-rapid orbit is obviously reduced during the last 2–3-h period of the observed parts, especially for the BeiDou orbits; (2) the predicted part of the ultra-rapid orbit is significantly limited in real-time and near real-time applications as its accuracy is influenced by that of the observed part; (3) not all satellites have a similar reduction in accuracy;
Figure 1 and
Figure 2 only show the obvious changes in satellite orbit accuracy. Therefore, to improve the accuracy of the ultra-rapid orbit, it is necessary to analyze and correct the orbit errors of the last part of the observed orbit. For this purpose, the orbit accuracy is analyzed in the following section, in regard to two aspects, the DOP values and the observation quality.
Because the stations of the ultra-rapid-orbit determination in ACs are not publicly accessible, this study was conducted mainly based on observations of a single month (1–30 June 2016) using the data from 409 tracking stations downloaded from the AC. First, the data quality of the tracking stations observations was analyzed using a multi-GNSS data preprocessing software (MTEQC), developed and improved by the authors [
28]. The MTEQC mainly refers to the data analysis and preprocessing function of the TEQC software [
32], such as the cycle-slip detection. However, to analyze multi-GNSS observations (GPS/GLONASS/Galileo/BeiDou), the authors added multi-GNSS data preprocessing capability in MTEQC.
Table 3 lists for all stations the average values of the 1-month data quality during the first 21 h and the last three hours over a single day in which the effective MP1 (the Multipath on P1), MP2(the Multipath on P2), and cycle-slip ratio (CSR) are listed. No significant difference is seen in the observation quality during the day.
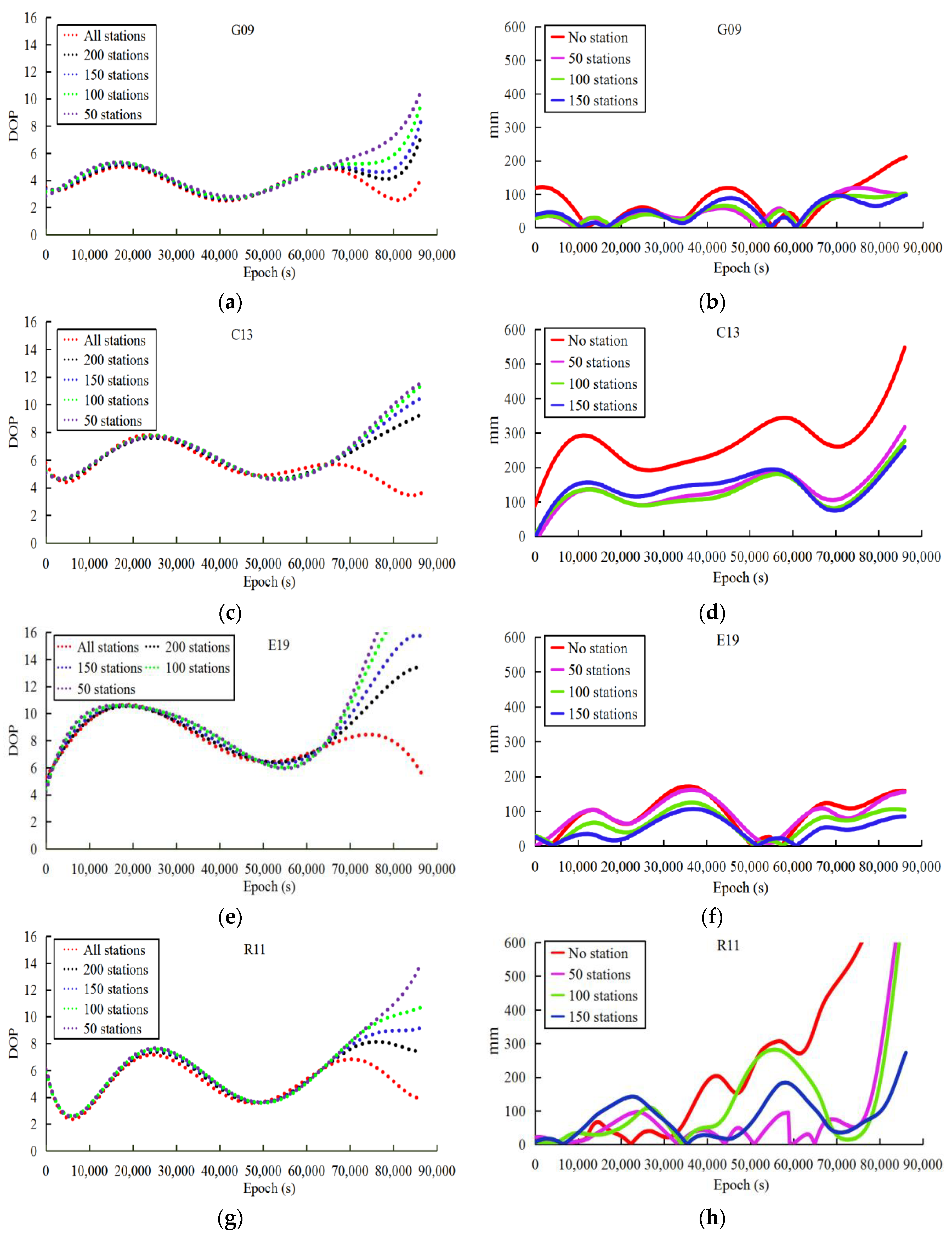
Given that the reduced accuracy of the observed ultra-rapid orbit may arise from timeliness in the ultra-rapid-orbit determination, the observations cannot be acquired in time. Therefore, the last 3 h of observations with 200, 150, 100, and none of the 409 stations are kept in different schemes to calculate the DOP values and the corresponding orbit accuracy based on the 1-month data sets. Because the amount of experimental data and results is large,
Figure 3 only plots the results of the G09, C13, E19 and R11 satellites of DOY 168, 2016, in which the DOP values and the orbit accuracy are plotted at 30-s intervals for every epoch.
From the statistics of the orbit accuracy, the orbit determined by the 409 stations was set as the reference in different schemes. Because the results are similar to the 409 stations, the scheme with 200 stations was ignored in
Figure 3. Moreover, to develop the relationship between the station numbers, DOP values, and orbit accuracy, the correlation factors between the DOP values and the orbit accuracy are given in
Table 4 based on the method proposed in [
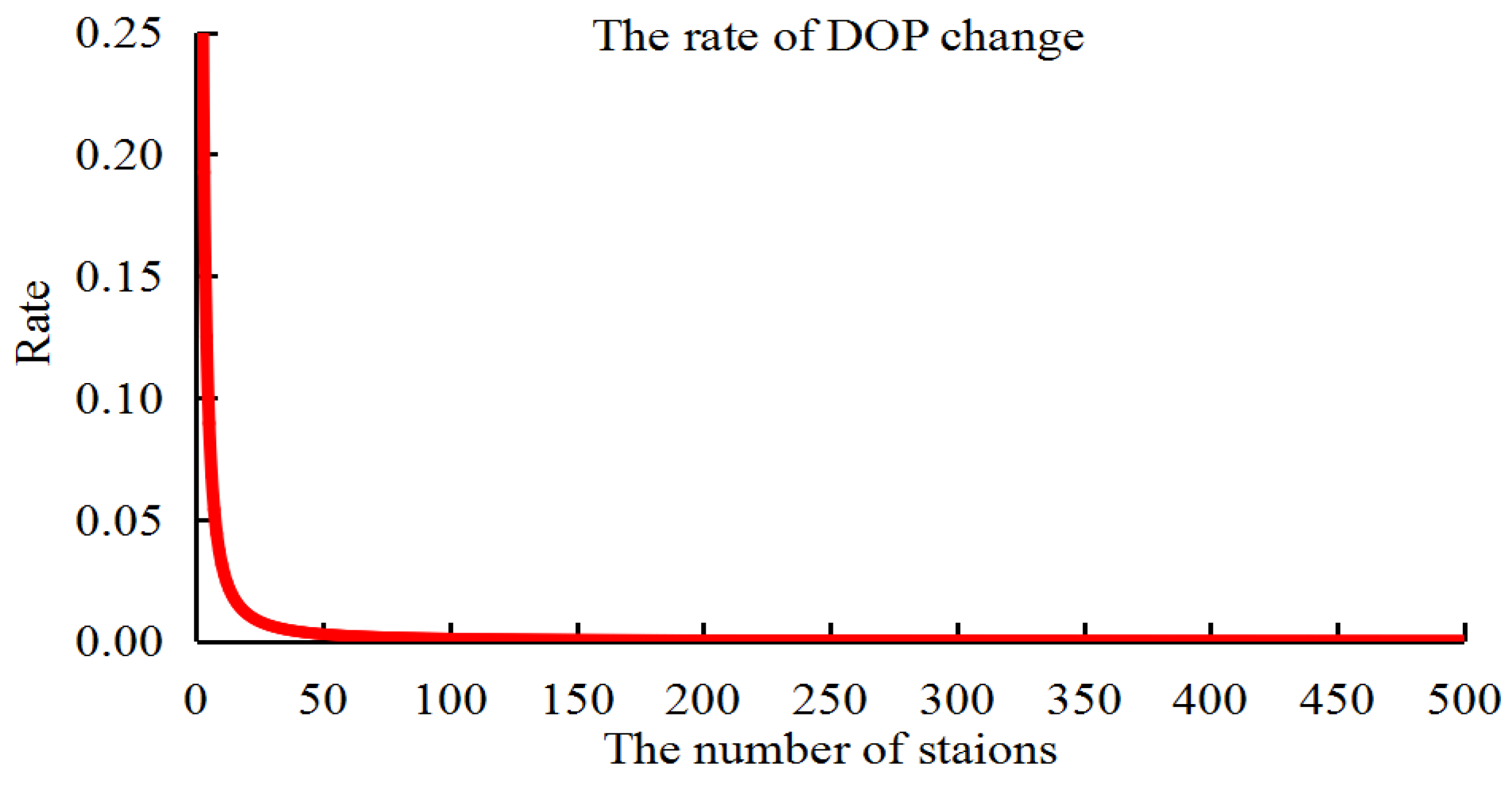
7,
11]. However, note that there is an exponential dependence between the number of stations and the DOP values in the orbit determination [
10], which is not discussed in this study. To explain this dependence, an experiment was performed to calculate the rate of change of DOP along with the number of stations based on GPS orbit determination.
Figure 4 gives the relationship between the DOP values and the number stations in which the exponential dependence was found.
Based on the above experiments, the decrease in the number of stations is seen to be consistent with increasing DOP values. The orbit accuracy of the whole arc is also affected by the last 3 h of observations that arises from changes in the initial orbit parameters. Nevertheless, the DOP values are consistent with the orbit accuracy, especially for the last 3 h, the correlation factors being greater than 0.8. Therefore, the decreased accuracy of the observed ultra-rapid orbit in the last arcs arising from insufficient observations may be corrected based indirectly on the geometrical configuration of the orbit determination. The next part discusses and analyzes the orbit correction method based on the DOP values.
3.2. Experiments of Orbit Correction
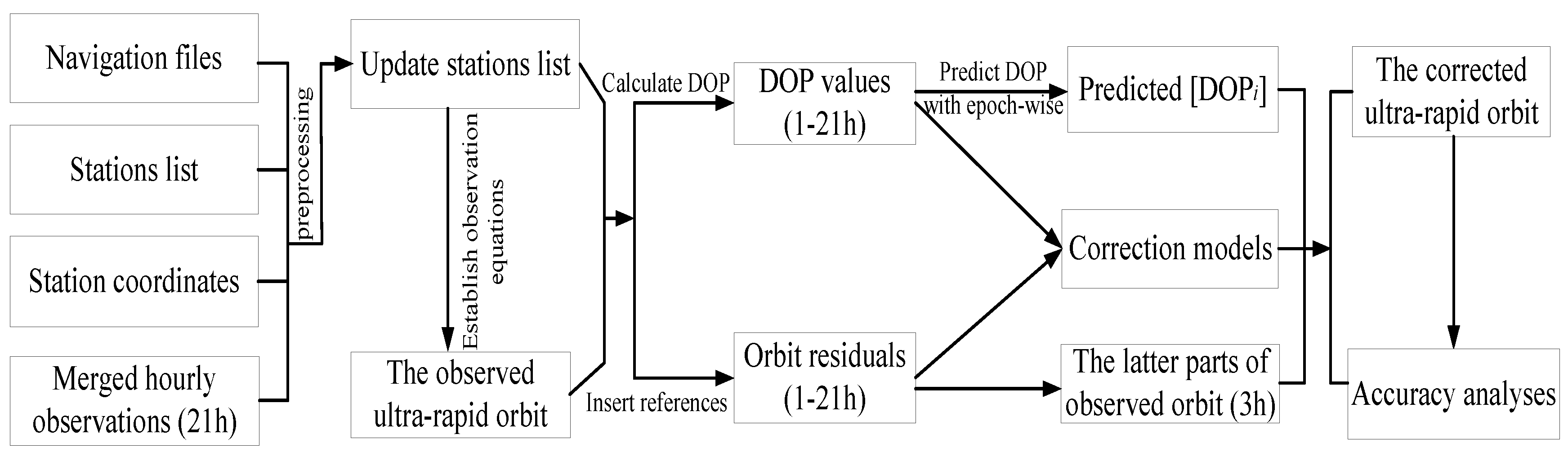
Because the tracking-station distributions in an ultra-rapid-orbit determination is unavailable, the simulation experiments are used to verify the orbit correction method. The hourly observations steadily downloaded were merged into daily data files to incorporate them into the orbit determination. The main steps of the simulation experiments are as follows:
- Step 1:
Prepare the navigation files, list of stations, and station coordinates and merge daily observations (without the last 3 h of observations); in addition, all observations are preprocessed to refine the initial list of stations in the orbit determination;
- Step 2:
Calculate epoch-wise the DOP values of each parameter, then accumulate and add them to the orbit correction equations;
- Step 3:
Compare the determined and predicted ultra-rapid orbit with the multi-GNSS rapid precise orbit of GFZ to obtain the orbit residuals;
- Step 4:
Establish the function models between the orbit state parameters and its corresponding accumulated DOP values;
- Step 5:
Predict the DOP values of the last 3 h of the observed parts;
- Step 6:
Incorporate the predicted DOP values into the orbit correction function to correct the observed part and obtain the predicted parts.
The specific steps of the above simulation experiments are shown in
Figure 5. In this study, the results of orbit corrections with 10-days (DOY 141–150, 2016) of the orbit determination were calculated.
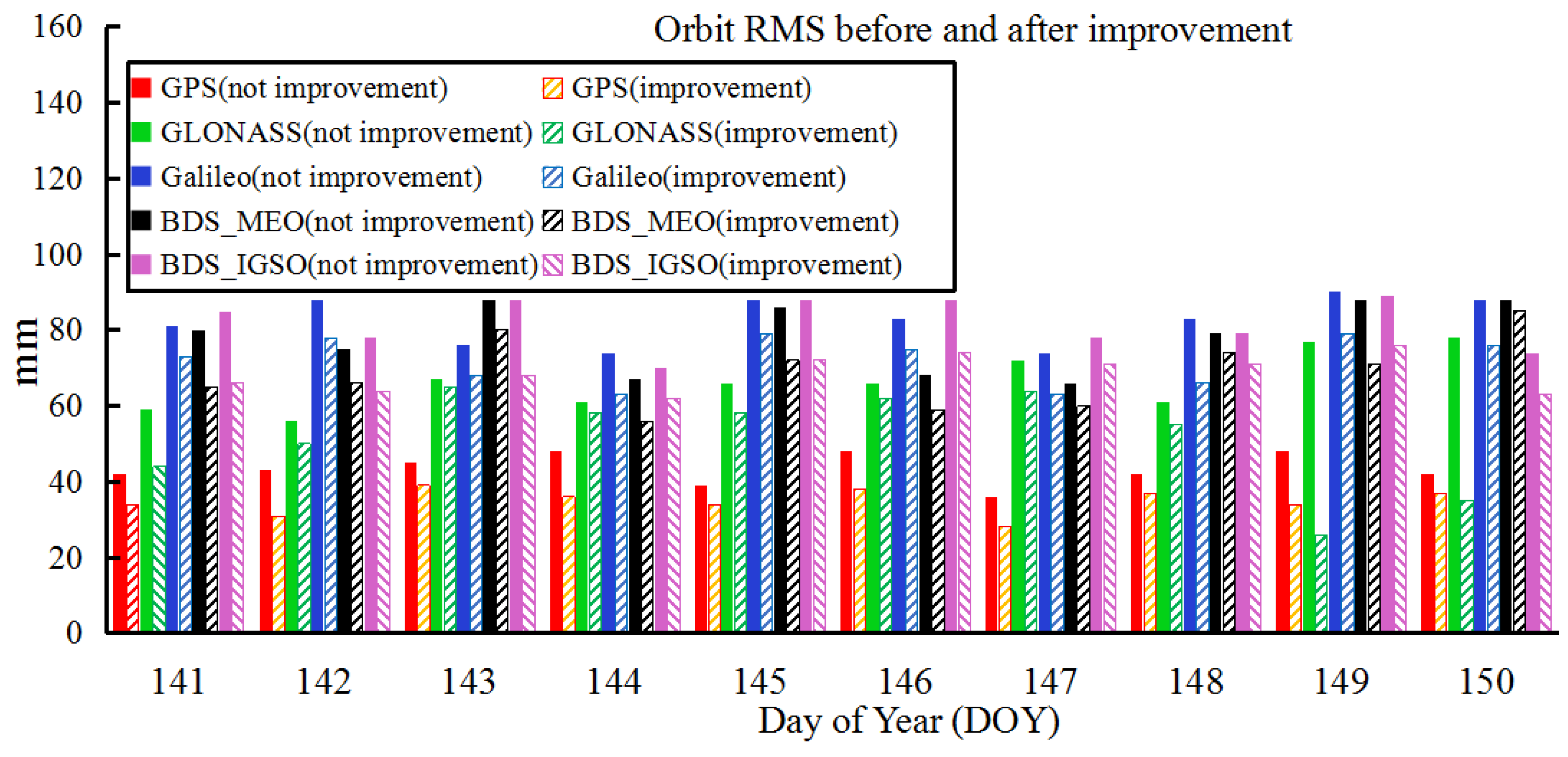
Figure 6 plots the 10-day results of the observed ultra-rapid-orbit correction during the last 3 h and the corresponding 3D RMSs before and after improvement. Furthermore, the improvement rate of the orbit accuracy before and after correction for different systems are listed in
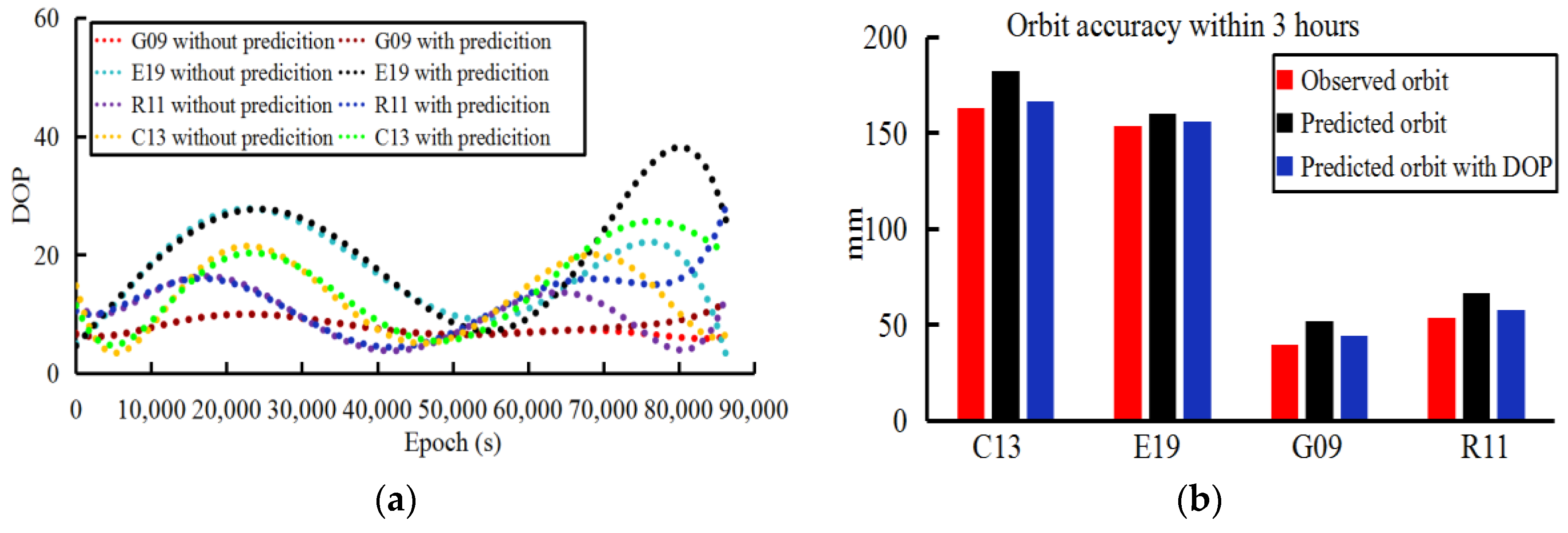
Table 5. To show more details regarding the effectiveness of the orbit correction method, the predicted DOP values (24 h) and the corrected results of C13, E19, G09, and R11 on DOY 141 were plotted (
Figure 7; only the last 3 h of the observed parts are given).
From the 10-day results of the orbit correction experiments, the correction method proposed in this study based on the predicted DOP values of the last 3 h of the observed ultra-rapid orbit was found to improve the orbit accuracy by 12–22%. In addition, to present the accuracy of the observed ultra-rapid correction model, the errors for the predicted DOP values and the orbit correction model were verified. In
Table 6, corresponding to
Figure 7a, the differences in the 10-day DOP values between the prediction and those without the prediction (acquired based on 409 stations) for the last 3 h are given; they are presented as ratios between the average values of the prediction and calculation for the last 3 h of the observed parts.
3.3. Ultra-Rapid Orbit Determination
To take into account timeliness and accuracy of the ultra-rapid-orbit determination, the geometrical configuration between tracking stations and the satellites must be an optimal or sub-optimal distribution. According to previous research [
10,
11], there is an exponential relationship between the number of stations and the DOP values in the orbit determination. To weight the contribution of a single station in the parameter estimations, this study defines the amplification factor of the DOP values, specifically, the impact of a single station on the overall DOP values [
11],
where
DOPi indicates the
DOP values based on all stations except the
i-th station, and
DOP0 represents the total DOP values before elimination. Note that, given the same distribution of stations, the more stations there are, the smaller are the DOP values. Moreover, in Equation (15),
DOP0 is one more station than
DOPi. Therefore,
DOPi is always than
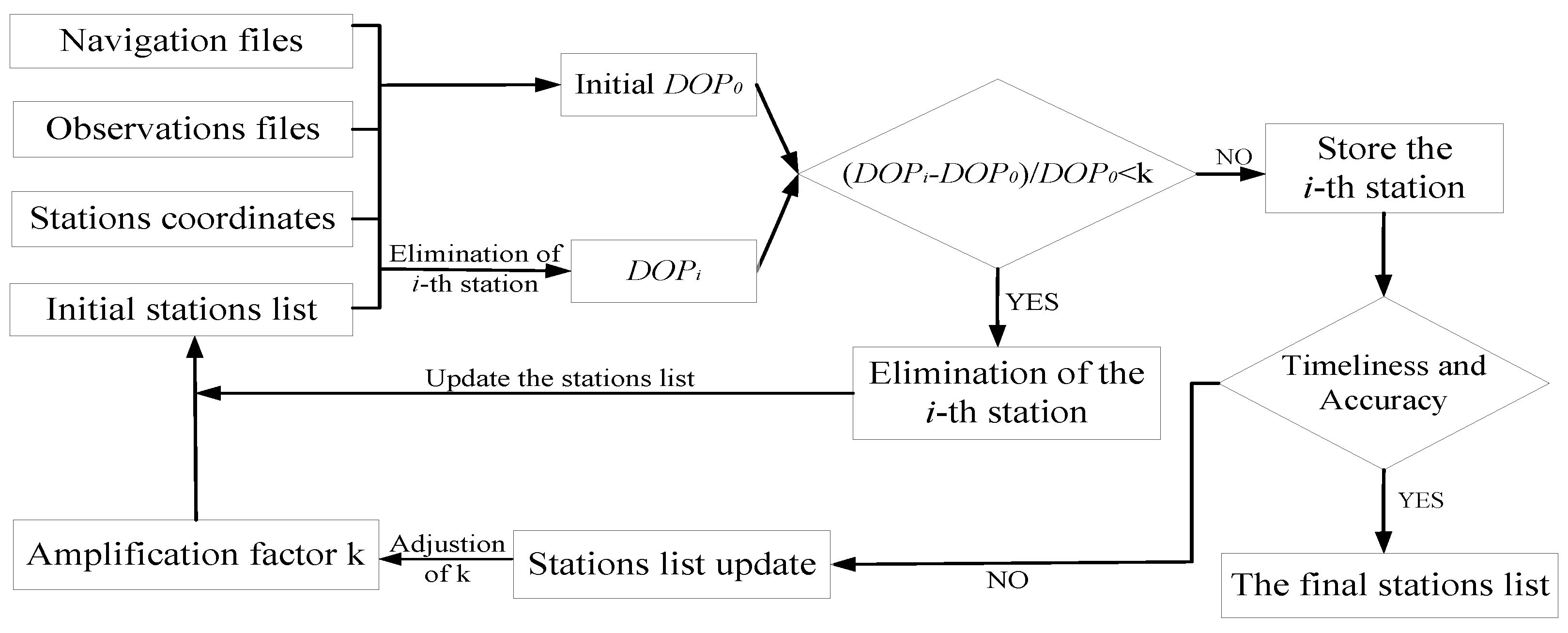
DOP0 in Equation (15). Based on different amplification factors of the DOP values, the main steps to optimize the tracking stations distribution are the following:
- Step 1:
Obtain the initial stations list, observation files, navigation files, and the corresponding stations coordinates;
- Step 2:
Calculate the DOP0 values of initial stations list after data preprocessing;
- Step 3:
Loop all stations to output the ki (amplification factors of i-th station) of every station;
- Step 4:
Compare ki with the given k; if ki is greater than k, the corresponding station is stored in the list of stations;
- Step 5:
Assess whether timeliness can be meet with the requirements based on the selected list of stations; if not, continue to expand k;
- Step 6:
Output the final list of stations for orbit determination.
With this procedure, the station distribution can be optimized for ultra-rapid-orbit determination, which indirectly takes orbit accuracy and timeliness into consideration. To describe the steps in the station optimization in more detail,
Figure 8 shows the experimental processes.
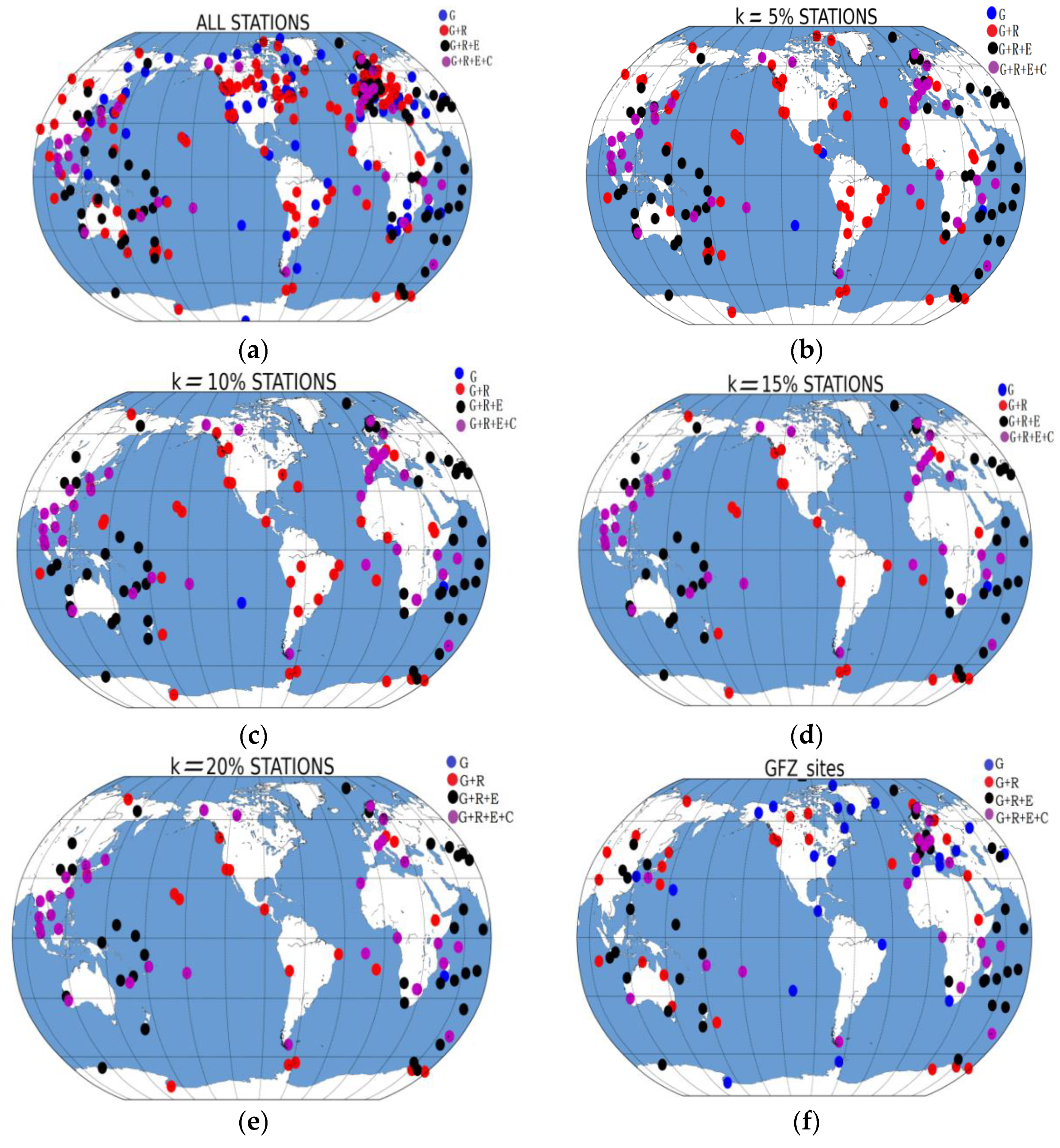
To analyze the effect of the station optimization methods, this study set the amplification factors to 5%, 10%, 15%, and 20%, in sequence. The list of GFZ is chosen as a reference to compare the station optimization schemes. Similarly, the observations of 409 stations downloaded by the ACs were included in the experiments.
Figure 9 shows the global distributions of the different schemes. For each scheme, the orbit correction method based on the DOP values proposed in this study was used to assess the optimization strategy.
Based on the above five schemes for ultra-rapid-orbit determination, the experiments were conducted as described in
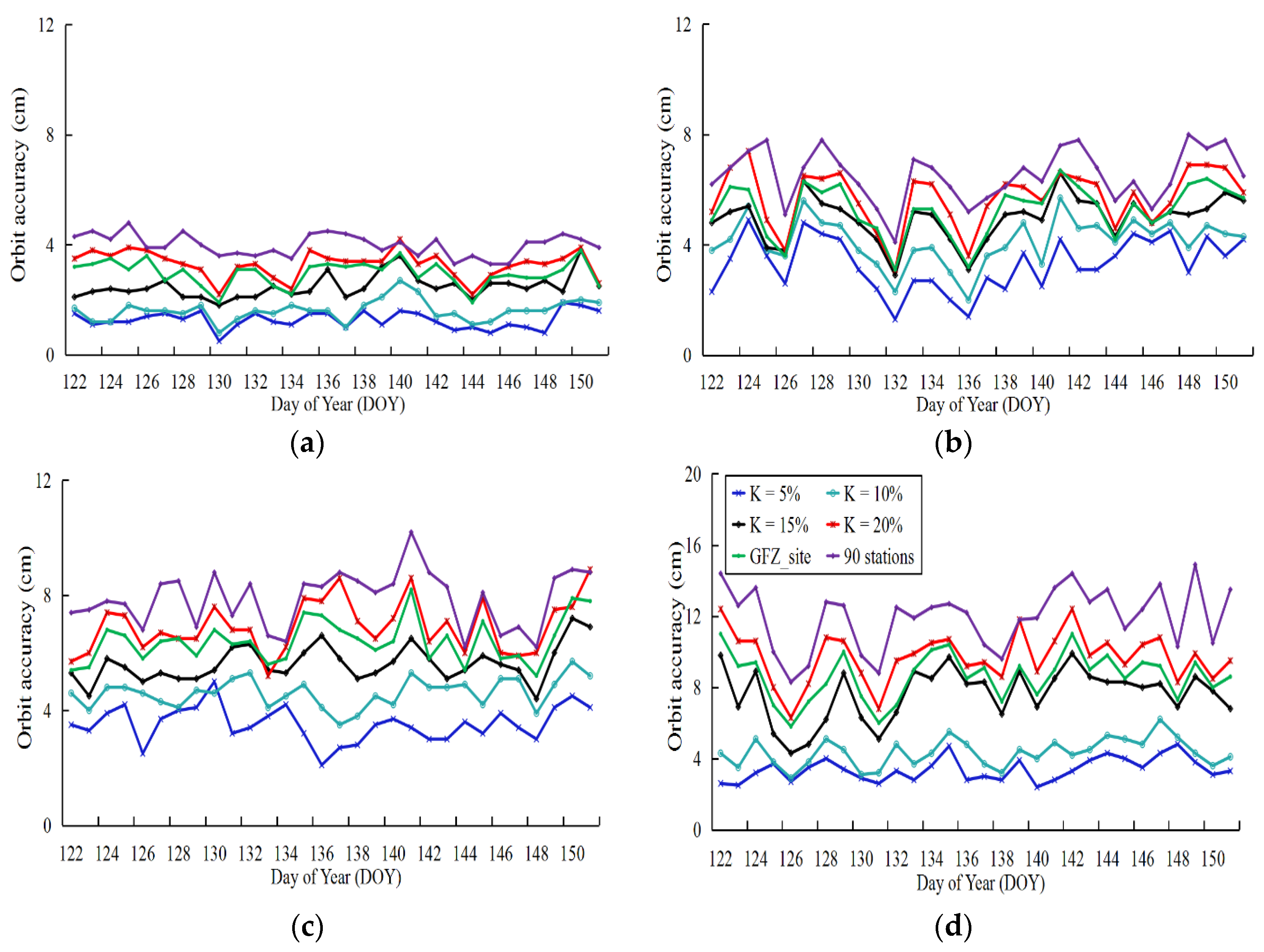
Section 3.2. First, the station distributions were selected based on the different DOP-derived amplification factors. The orbit determination and correction experiments are based on a combination of 21-h observations. The accuracy of the orbit determination takes the 409 stations as references during the 24-h period to calculate the orbit accuracy in the last 3 h. In the experiments, a single month (DOY 122–151, 2016) of orbit accuracy data was obtained; the corresponding orbit 1D RMSs are plotted in
Figure 10.
The key legend for all four graphs is given in panel
Figure 10d. In addition, to compare the distribution of widely used stations with that for the optimized stations, 90 stations were randomly selected and added to the orbit determination schemes.
Table 7 shows the correction results of the different satellite systems under different schemes and the corresponding number of stations. However, note that the list of stations did not change during the month for the orbit determination experiments. Moreover, the list of stations from different schemes were re-selected to ensure the reliability of the experiment results before determining orbit solutions. Moreover, in
Table 7, the orbit determination of the amplification factors 5% and 10% with the same stations for BDS show an increasing 1D RMSs, which produces changes in the parameter values related to the orbit, such as the troposphere and station clocks, based on different stations of other systems.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}