3DAirSig: A Framework for Enabling In-Air Signatures Using a Multi-Modal Depth Sensor

 ,
, 

Abstract
1. Introduction
2. Related Work
3. Framework Overview
4. In-Air Signature Acquisition
4.1. Data Acquisition Setup
4.2. Hand Segmentation
4.3. Fingertip Tracking
4.4. The Dataset Creation
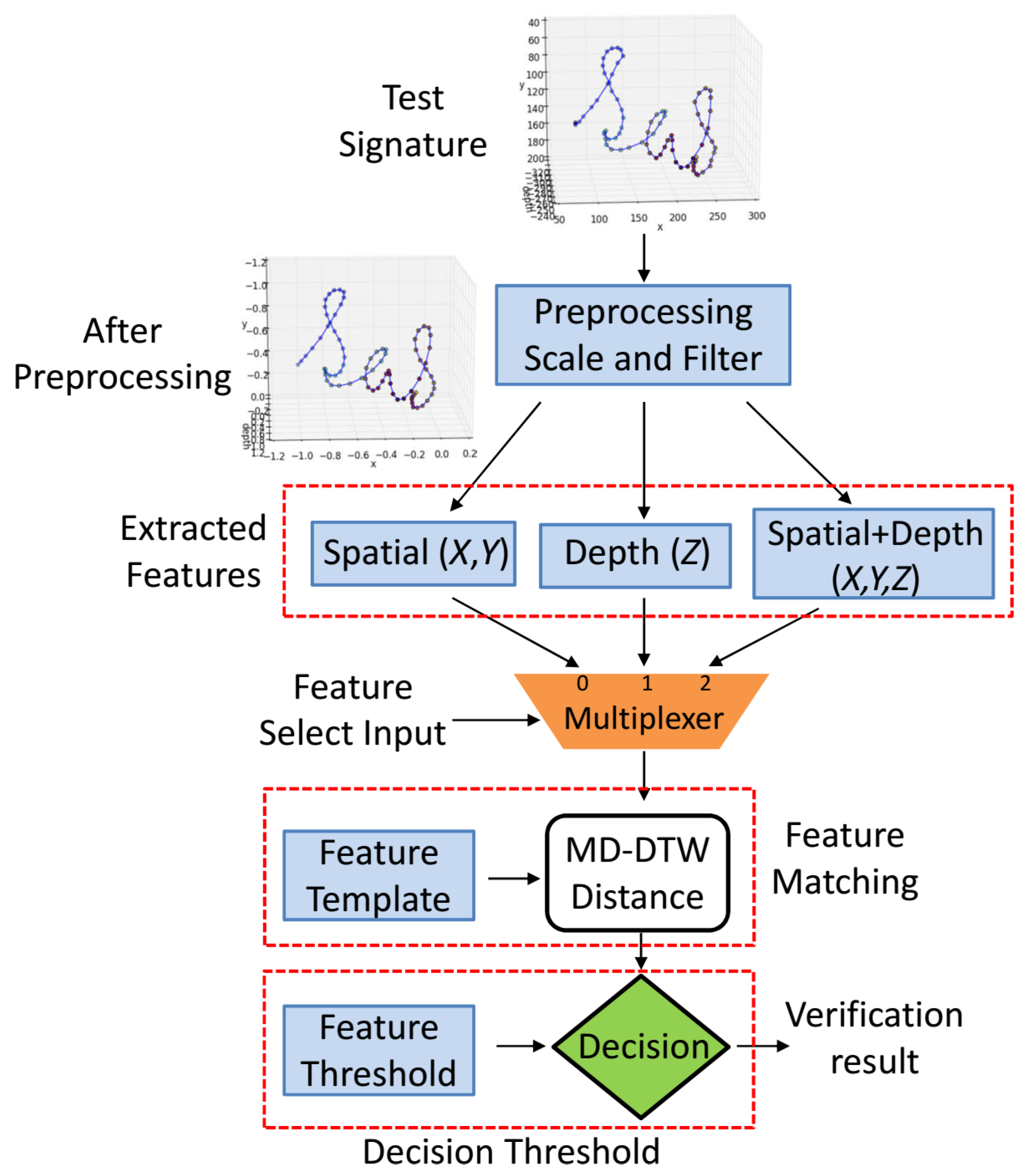
5. In-air Signature Verification
5.1. Preprocessing
5.2. Feature Extraction
5.3. Training Phase
5.4. Testing Phase
6. Experiments and Results
6.1. Ablation Study
6.2. Comparison with Other Verification Methods
7. Conclusions and Future Work
Author Contributions
Funding
References
- Sajid, H.; Sen-ching, S.C. VSig: Hand-gestured signature recognition and authentication with wearable camera. In Proceedings of the 2015 IEEE International Workshop on Information Forensics and Security (WIFS), Rome, Italy, 16–19 November 2015; pp. 1–6. [Google Scholar]
- Bush, L.; Carr, S.; Hall, J.; Saulson, J.; Scott-Simmons, W. Creating a “Classroom of the Future” for P-12 Pre-Service Educators. In Proceedings of the Society for Information Technology & Teacher Education International Conference, Savannah, GA, USA, 7 November 2016; pp. 920–924. [Google Scholar]
- Robert, S.N.; Thilagavathi, B. Offline signature verification using support vectore machine. In Proceedings of the 2015 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 19–20 March 2015; pp. 1–6. [Google Scholar]
- Chandra, S.; Maheskar, S. Offline signature verification based on geometric feature extraction using artificial neural network. In Proceedings of the 2016 3rd International Conference on Recent Advances in Information Technology (RAIT), Dhanbad, India, 3–5 March 2016; pp. 410–414. [Google Scholar]
- Bhattacharya, I.; Ghosh, P.; Biswas, S. Offline signature verification using pixel matching technique. Procedia Technol. 2013, 10, 970–977. [Google Scholar] [CrossRef]
- Lei, H.; Govindaraju, V. A comparative study on the consistency of features in on-line signature verification. Pattern Recognit. Lett. 2005, 26, 2483–2489. [Google Scholar] [CrossRef]
- Parodi, M.; Gómez, J.C. Legendre polynomials based feature extraction for online signature verification. Consistency analysis of feature combinations. Pattern Recognit. 2014, 47, 128–140. [Google Scholar] [CrossRef]
- Fayyaz, M.; Saffar, M.H.; Sabokrou, M.; Hoseini, M.; Fathy, M. Online signature verification based on feature representation. In Proceedings of the 2015 The International Symposium on Artificial Intelligence and Signal Processing (AISP), Mashhad, Iran, 3–5 March 2015; pp. 211–216. [Google Scholar]
- Van, B.L.; Garcia-Salicetti, S.; Dorizzi, B. On using the Viterbi path along with HMM likelihood information for online signature verification. IEEE Trans. Syst. Man Cybern. Part B 2007, 37, 1237–1247. [Google Scholar] [CrossRef]
- Alonso-Fernandez, F.; Fierrez-Aguilar, J.; Ortega-Garcia, J. Sensor interoperability and fusion in signature verification: A case study using tablet pc. In Advances in Biometric Person Authentication; Springer: New York, NY, USA, 2005; pp. 180–187. [Google Scholar]
- Lee, L.L.; Berger, T.; Aviczer, E. Reliable on-line human signature verification systems. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 643–647. [Google Scholar] [CrossRef]
- Iranmanesh, V.; Ahmad, S.M.S.; Adnan, W.A.W.; Malallah, F.L.; Yussof, S. Online signature verification using neural network and pearson correlation features. In Proceedings of the 2013 IEEE Conference on Open Systems (ICOS), Kuching, Malaysia, 2–4 December 2013; pp. 18–21. [Google Scholar]
- Gruber, C.; Gruber, T.; Krinninger, S.; Sick, B. Online signature verification with support vector machines based on LCSS kernel functions. IEEE Trans. Syst. Man Cybern. Part B 2010, 40, 1088–1100. [Google Scholar] [CrossRef] [PubMed]
- Martens, R.; Claesen, L. On-line signature verification by dynamic time-warping. In Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996; Volume 3, pp. 38–42. [Google Scholar]
- Feng, H.; Wah, C.C. Online signature verification using a new extreme points warping technique. Pattern Recognit. Lett. 2003, 24, 2943–2951. [Google Scholar] [CrossRef]
- Fang, Y.; Kang, W.; Wu, Q.; Tang, L. A novel video-based system for in-air signature verification. Comput. Electr. Eng. 2017, 57, 1–14. [Google Scholar] [CrossRef]
- Jeon, J.H.; Oh, B.S.; Toh, K.A. A system for hand gesture based signature recognition. In Proceedings of the 2012 12th International Conference on Control Automation Robotics & Vision (ICARCV), Guangzhou, China, 5–7 December 2012; pp. 171–175. [Google Scholar]
- Bailador, G.; Sanchez-Avila, C.; Guerra-Casanova, J.; de Santos Sierra, A. Analysis of pattern recognition techniques for in-air signature biometrics. Pattern Recognit. 2011, 44, 2468–2478. [Google Scholar] [CrossRef]
- Khoh, W.H.; Pang, Y.H.; Teoh, A.B.J. In-air hand gesture signature recognition system based on 3-dimensional imagery. Multimed. Tools Appl. 2018, 1–25. [Google Scholar] [CrossRef]
- Zhou, X.; Wan, Q.; Zhang, W.; Xue, X.; Wei, Y. Model-based deep hand pose estimation. arxiv, 2016; arXiv:1606.06854. [Google Scholar]
- Malik, J.; Elhayek, A.; Stricker, D. Simultaneous Hand Pose and Skeleton Bone-Lengths Estimation from a Single Depth Image. In Proceedings of the 2017 International Conference on 3D Vision (3DV), Qingdao, China, 10–12 October 2017. [Google Scholar]
- Yuan, S.; Garcia-Hernando, G.; Stenger, B.; Moon, G.; Chang, J.Y.; Lee, K.M.; Molchanov, P.; Kautz, J.; Honari, S.; Ge, L.; et al. Depth-Based 3D Hand Pose Estimation: From Current Achievements to Future Goals. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, Utah, 19–21 June 2018. [Google Scholar]
- Kumar, A.; Bhatia, K. A survey on offline handwritten signature verification system using writer dependent and independent approaches. In Proceedings of the 2016 2nd International Conference on Advances in Computing, Communication, & Automation (ICACCA) (Fall), Bareilly, India, 30 September–1 October 2016; pp. 1–6. [Google Scholar]
- Yadav, M.; Kumar, A.; Patnaik, T.; Kumar, B. A survey on offline signature verification. Int. J. Eng. Innov. Technol. Vol. 2013, 2, 337–340. [Google Scholar]
- Dalal, S.; Jindal, U. Performance of integrated signature verification approach. In Proceedings of the 2016 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; pp. 3369–3373. [Google Scholar]
- Katagiri, M.; Sugimura, T. Personal authentication by free space signing with video capture. In Proceedings of the 5th Asian Conference on Computer Vision, Melbourne, Australia, 3–25 January 2002; Volume 6. [Google Scholar]
- Takeuchi, A.; Manabe, Y.; Sugawara, K. Multimodal soft biometrie verification by hand shape and handwriting motion in the air. In Proceedings of the 2013 International Joint Conference on Awareness Science and Technology & Ubi-Media Computing (iCAST 2013 & UMEDIA 2013), Aizu-Wakamatsu, Japan, 2–4 November 2013; pp. 103–109. [Google Scholar]
- Diep, N.N.; Pham, C.; Phuong, T.M. SigVer3D: Accelerometer Based Verification of 3-D Signatures on Mobile Devices. In Knowledge and Systems Engineering; Springer: Berlin/Heidelberg, Germany, 2015; pp. 353–365. [Google Scholar]
- Matsuo, K.; Okumura, F.; Hashimoto, M.; Sakazawa, S.; Hatori, Y. Arm swing identification method with template update for long term stability. In International Conference on Biometrics; Springer: Berlin/Heidelberg, Germany, 2007; pp. 211–221. [Google Scholar]
- Creative. Senz3D Interactive Gesture Camera. 2018. Available online: https://asia.creative.com/p/web-cameras/creative-senz3d (accessed on 7 November 2018).
- Guo, H.; Wang, G.; Chen, X.; Zhang, C.; Qiao, F.; Yang, H. Region Ensemble Network: Improving Convolutional Network for Hand Pose Estimation. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017. [Google Scholar]
- Tompson, J.; Stein, M.; Lecun, Y.; Perlin, K. Real-time continuous pose recovery of human hands using convolutional networks. ACM Trans. Graph. 2014, 33, 169. [Google Scholar] [CrossRef]
- Tang, D.; Jin Chang, H.; Tejani, A.; Kim, T.K. Latent regression forest: Structured estimation of 3d articulated hand posture. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 24–27 June 2014; pp. 3786–3793. [Google Scholar]
- Sun, X.; Wei, Y.; Liang, S.; Tang, X.; Sun, J. Cascaded hand pose regression. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 824–832. [Google Scholar]
- Wang, G.; Chen, X.; Guo, H.; Zhang, C. Region Ensemble Network: Towards Good Practices for Deep 3D Hand Pose Estimation. J. Vis. Commun. Image Represent. 2018, 55, 404–414. [Google Scholar] [CrossRef]
- Oberweger, M.; Wohlhart, P.; Lepetit, V. Training a feedback loop for hand pose estimation. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 3316–3324. [Google Scholar]
- Malik, M.I.; Liwicki, M. From terminology to evaluation: Performance assessment of automatic signature verification systems. In Proceedings of the 2012 International Conference on Frontiers in Handwriting Recognition, Bari, Italy, 18–20 September 2012; pp. 613–618. [Google Scholar]
- Nguyen, V.; Blumenstein, M.; Muthukkumarasamy, V.; Leedham, G. Off-line signature verification using enhanced modified direction features in conjunction with neural classifiers and support vector machines. In Proceedings of the Ninth International Conference on Document Analysis and Recognition (ICDAR 2007), Parana, Brazil, 23–26 September 2007; Volume 2, pp. 734–738. [Google Scholar]
- Malik, M.; Liwicki, M.; Alewijnse, L.; Ohyama, W.; Blumenstein, M.; Found, B. Signature verification and writer identification competitions for on-and offline skilled forgeries (sigwicomp2013). In Proceedings of the 12th International Conference on Document Analysis and Recognition, Washigton, DC, USA, 25–28 August 2013. [Google Scholar]
- Guerbai, Y.; Chibani, Y.; Abbas, N. One-class versus bi-class SVM classifier for off-line signature verification. In Proceedings of the 2012 International Conference on Multimedia Computing and Systems, Tangier, Morocco, 10–12 May 2012; pp. 206–210. [Google Scholar]
- Bergamini, C.; Oliveira, L.S.; Koerich, A.L.; Sabourin, R. Combining different biometric traits with one-class classification. Signal Process. 2009, 89, 2117–2127. [Google Scholar] [CrossRef]
- Amer, M.; Goldstein, M.; Abdennadher, S. Enhancing one-class support vector machines for unsupervised anomaly detection. In Proceedings of the ACM SIGKDD Workshop on Outlier Detection and Description, Chicago, IL, USA, 11 August 2013; pp. 8–15. [Google Scholar]
- Manevitz, L.; Yousef, M. One-class document classification via neural networks. Neurocomputing 2007, 70, 1466–1481. [Google Scholar] [CrossRef]
- Sanguansat, P. Multiple multidimensional sequence alignment using generalized dynamic time warping. WSEAS Trans. Math. 2012, 11, 668–678. [Google Scholar]
- Kamel, N.S.; Sayeed, S.; Ellis, G.A. Glove-based approach to online signature verification. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1109–1113. [Google Scholar] [CrossRef] [PubMed]
- Moon, H.C.; Jang, S.I.; Oh, K.; Toh, K.A. An In-Air Signature Verification System Using Wi-Fi Signals. In Proceedings of the 2017 4th International Conference on Biomedical and Bioinformatics Engineering, Seoul, Korea, 12–14 November 2017; pp. 133–138. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Fingertips 3D Joint Location Error |
|---|---|
| DeepModel [20] | 24.4 mm |
| Oberweger et al. [36] | 23.2 mm |
| REN [35] | 15.6 mm |
| Ours | 13.2 mm |
| Subject | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | Error Number |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FR | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 3 |
| FA | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 2 | 0 | 5 |
| FR | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 2 | 0 | 3 | 8 |
| FA | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 2 | 0 | 0 | 2 | 0 | 1 | 3 | 0 | 11 |
| FR | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 2 | 5 |
| FA | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 1 | 2 | 0 | 6 |
| 3D-SV | ||||||||||||||||
| FR | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 3 |
| FA | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 3 |
| Verification Module | FAR (%) | FRR (%) | EER (%) |
|---|---|---|---|
| DSV | 1.33 | 2.00 | 0.51 |
| SSV | 2.93 | 5.33 | 0.69 |
| ISSV | 1.60 | 3.34 | 0.58 |
| 3D-SV | 0.80 | 2.00 | 0.46 |
| Method | Dataset/Acquisition Method | Result |
|---|---|---|
| Nguyen et al. [28] | self-built/Accelerometer | EER: 0.8% |
| Hasan et al. [1] | self-built/Google glass | Accuracy = 97.5% |
| Nidal et al. [45] | self-built/ data glove | EER: 2.37% |
| Jeon et al. [17] | self-built/ depth camera | EER: 0.68% |
| Moon et al. [46] | self-built/Wifi signal | EER: 4.31% |
| Yuxun et al. [16] | self-built/RGB camera | FAR: 1.90% and FRR: 2.86% |
| DSV[Ours] | self-built/depth camera | EER: 0.51% |
| 3D-SV[Ours] | self-built/depth camera | EER: 0.46% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malik, J.; Elhayek, A.; Ahmed, S.; Shafait, F.; Malik, M.I.; Stricker, D. 3DAirSig: A Framework for Enabling In-Air Signatures Using a Multi-Modal Depth Sensor. Sensors 2018, 18, 3872. https://doi.org/10.3390/s18113872
Malik J, Elhayek A, Ahmed S, Shafait F, Malik MI, Stricker D. 3DAirSig: A Framework for Enabling In-Air Signatures Using a Multi-Modal Depth Sensor. Sensors. 2018; 18(11):3872. https://doi.org/10.3390/s18113872
Chicago/Turabian StyleMalik, Jameel, Ahmed Elhayek, Sheraz Ahmed, Faisal Shafait, Muhammad Imran Malik, and Didier Stricker. 2018. "3DAirSig: A Framework for Enabling In-Air Signatures Using a Multi-Modal Depth Sensor" Sensors 18, no. 11: 3872. https://doi.org/10.3390/s18113872
APA StyleMalik, J., Elhayek, A., Ahmed, S., Shafait, F., Malik, M. I., & Stricker, D. (2018). 3DAirSig: A Framework for Enabling In-Air Signatures Using a Multi-Modal Depth Sensor. Sensors, 18(11), 3872. https://doi.org/10.3390/s18113872