DTM-Aided Adaptive EPF Navigation Application in Railways

Abstract
1. Introduction
2. GNSS/INS Extended Kalman Particle Filter
2.1. GNSS/INS Extended Kalman Filter
2.1.1. System Model
2.1.2. Measurement Model
2.1.3. Extended Kalman Filter Algorithm
- (a)
- Calculate the transition matrix, ;
- (b)
- Calculate the system noise covariance matrix, ;
- (c)
- Propagate the state vector estimate from to :
- (d)
- Propagate the error covariance matrix from to :
- (e)
- Calculate the measurement matrix ;
- (f)
- Calculate the measurement noise covariance matrix ;
- (g)
- Calculate the Kalman gain matrix :
- (h)
- Calculate the innovation ;
- (i)
- Update the state vector estimate from to :
- (j)
- Update the error covariance matrix from to :
2.2. Improved Sampling Importance Resampling Filter
3. DTM-Aided Adaptive GNSS/INS EPF
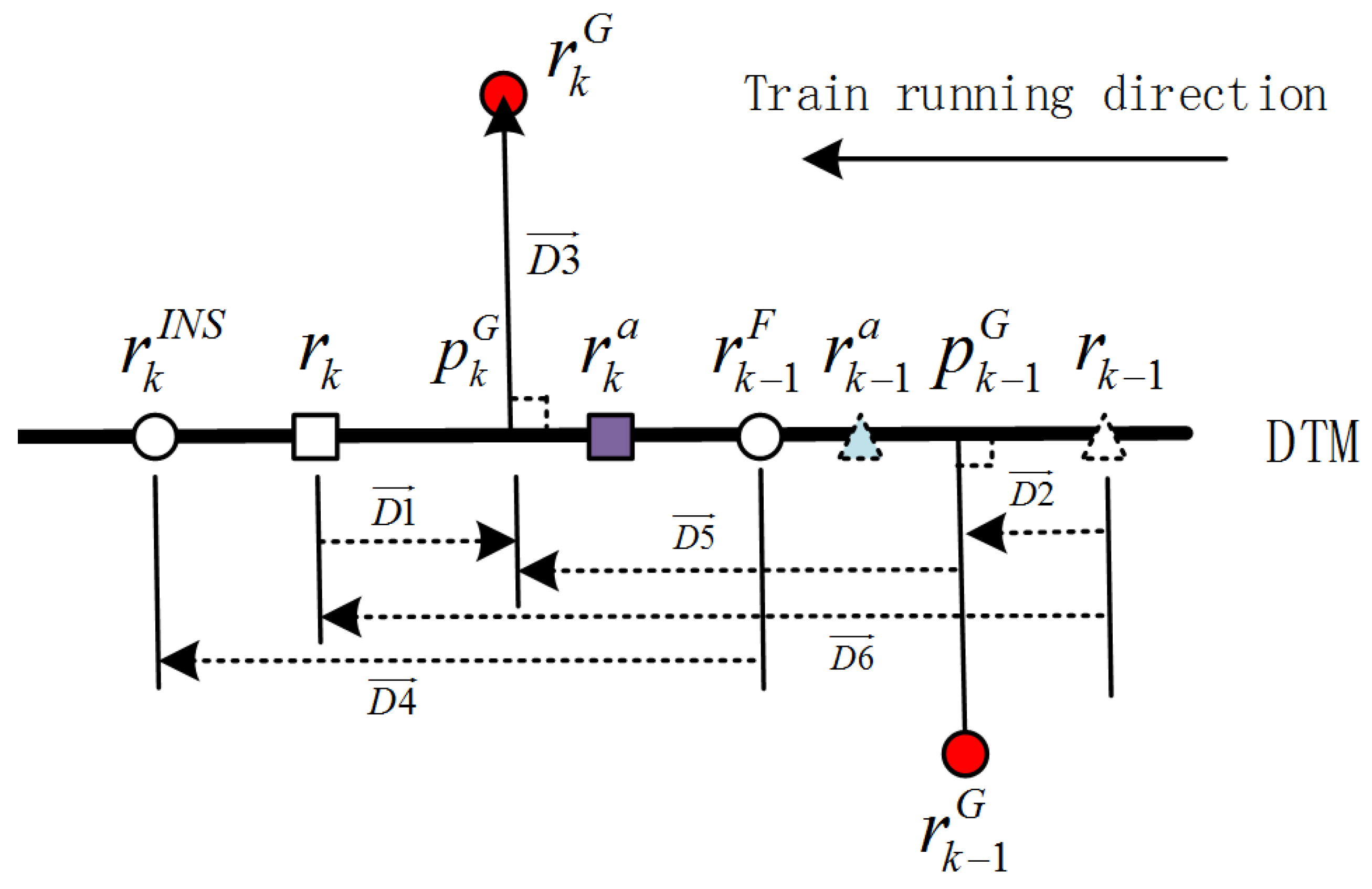
3.1. DTM-Aided GNSS Covariance Matrix Estimate
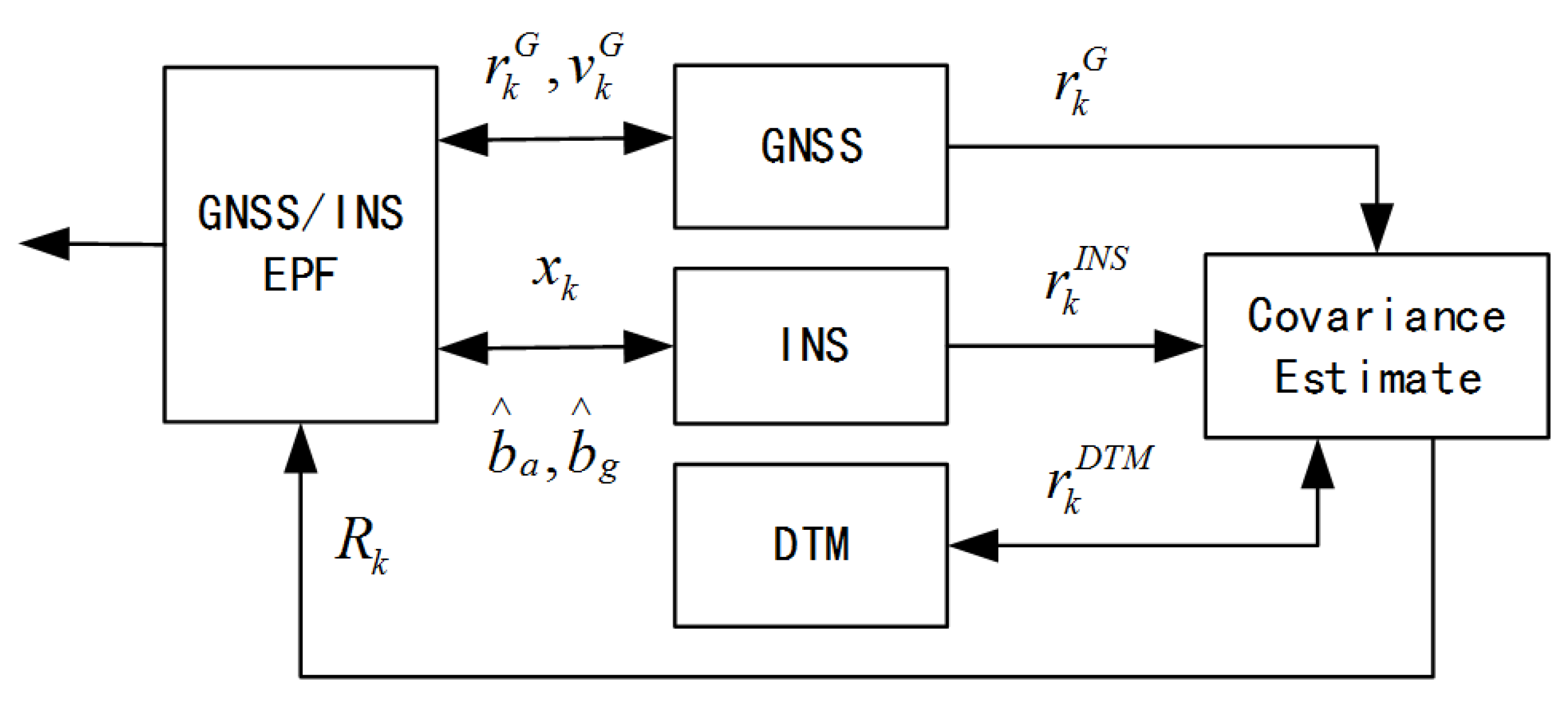
3.2. DTM-Aided Adaptive GNSS/INS EPF Architecture
| Algorithm 1: Adaptive GNSS/INS EPF algorithm. |
 |
4. Experiments and Results
4.1. Experimental Environment
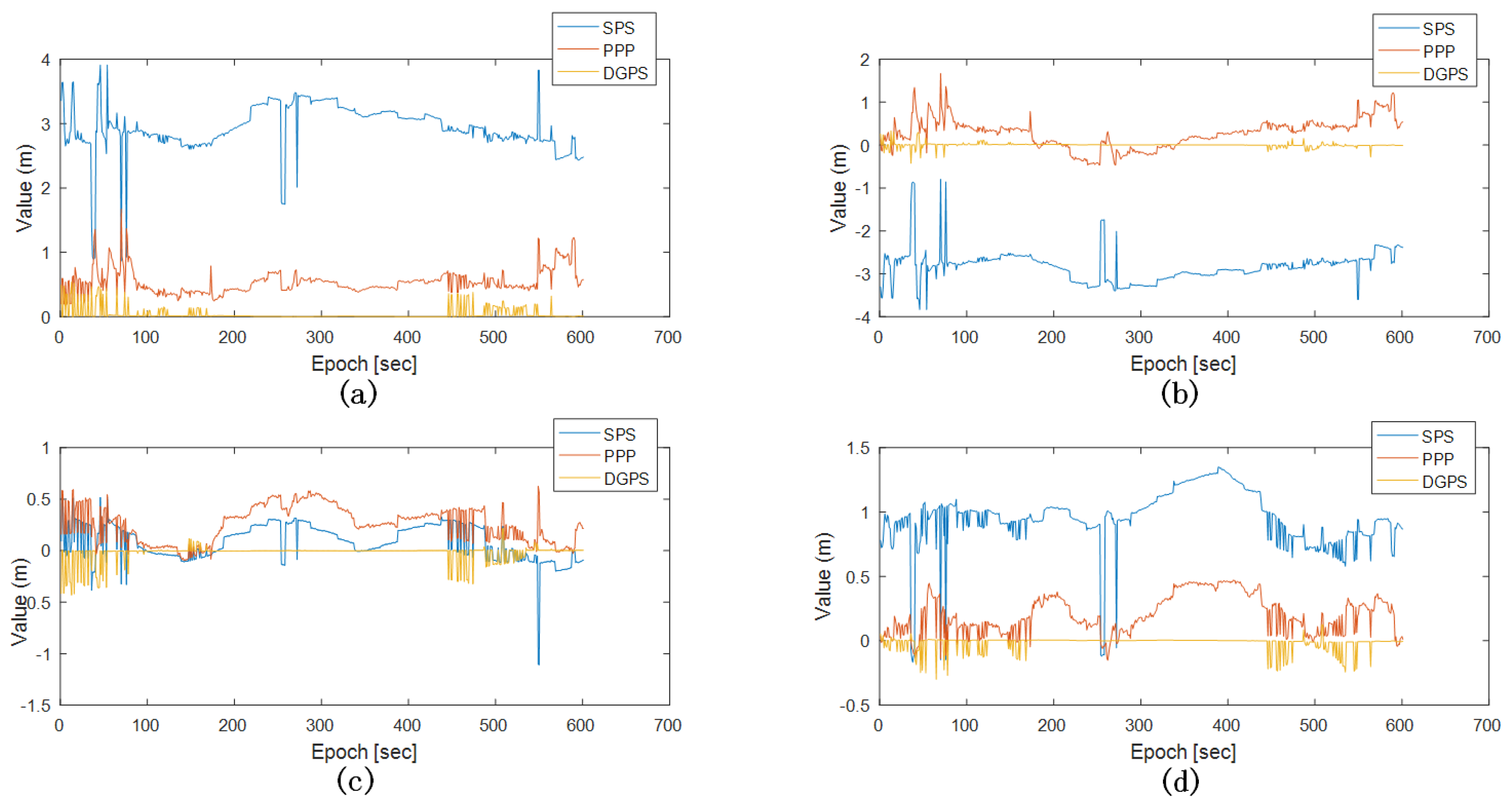
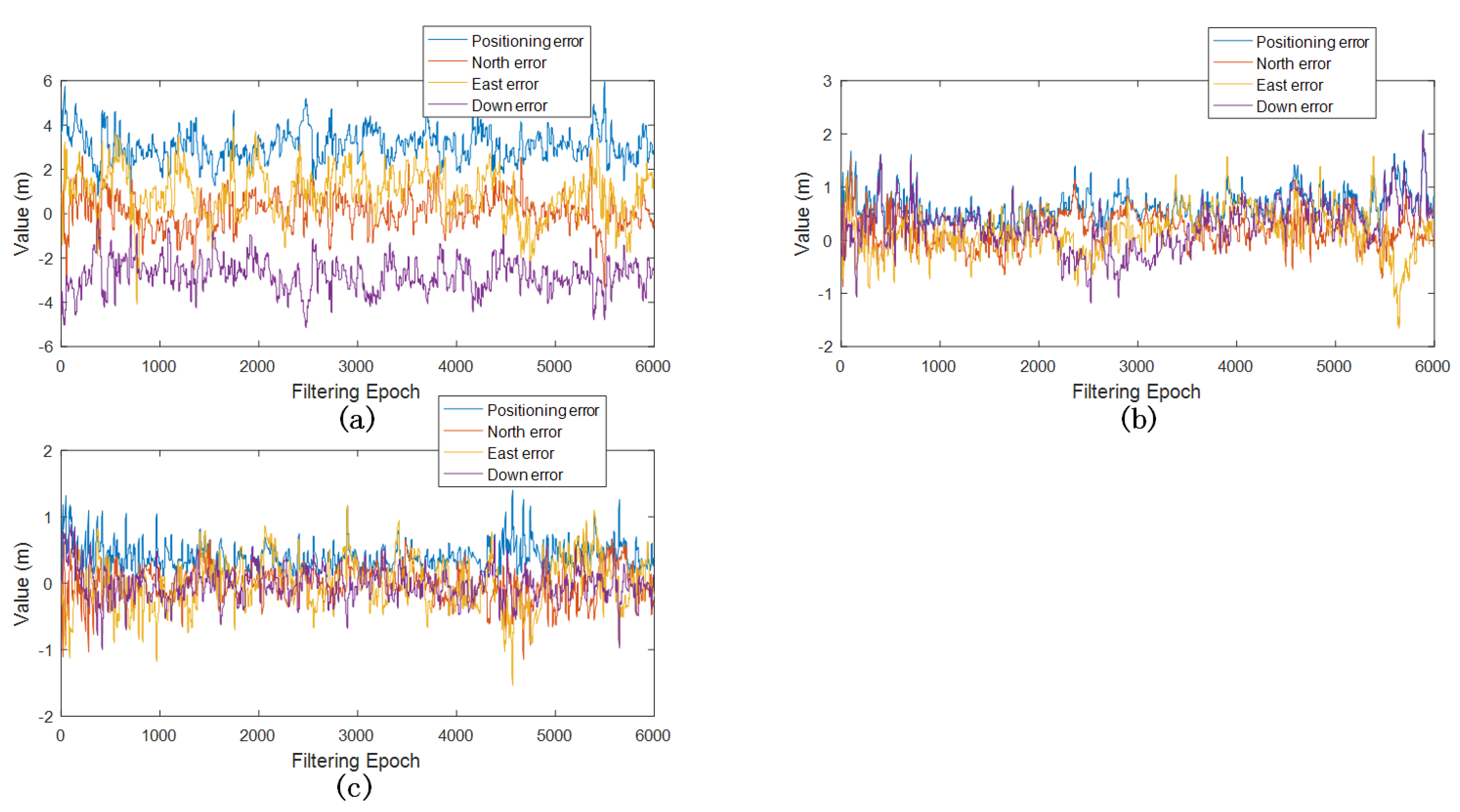
4.2. Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Beugin, J.; Marais, J. Simulation-based evaluation of dependability and safety properties of satellite technologies for railway localization. Transp. Res. Part C 2012, 22, 42–57. [Google Scholar] [CrossRef]
- Neri, A.; Sabina, S.; Rispoli, F.; Mascia, U. GNSS and Odometry Fusion for High Integrity and High Availability Train Control Systems. In Proceedings of the ION GNSS+ 2015, Tampa, FL, USA, 14–18 September 2015; pp. 639–648. [Google Scholar]
- Stallo, C.; Neri, A.; Salvatori, P.; Coluccia, A.; Capua, R.; Olivieri, G.; Gattuso, L.; Bonenberg, L.; Moore, T.; Rispoli, F. GNSS-based Location Determination System Architecture for Railway Performance Assessment in Presence of Local Effects. In Proceedings of the IEEE/ION Plans 2018, Monterey, CA, USA, 23–26 April 2018; pp. 374–381. [Google Scholar]
- Marais, J.; Beugin, J.; Berbineau, M. A Survey of GNSS-Based Research and Developments for the European Railway Signaling. IEEE Trans. Intell. Transp. Syst. 2017, 99, 1–17. [Google Scholar] [CrossRef]
- Wang, L.; Groves, P.D.; Ziebart, M.K. Multi-Constellation GNSS Performance Evaluation for Urban Canyons Using Large Virtual Reality City Models. J. Navig. 2012, 65, 459–476. [Google Scholar] [CrossRef]
- Geng, T.; Su, X.; Fang, R.; Xie, X.; Zhao, Q.; Liu, J. BDS Precise Point Positioning for Seismic Displacements Monitoring: Benefit from the High-Rate Satellite Clock Corrections. Sensors 2016, 16, 2192. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Li, Z.; Zhao, J.; Zhou, K.; Wang, Z.; Yuan, H. Smart Device-Supported BDS/GNSS Real-Time Kinematic Positioning for Sub-Meter-Level Accuracy in Urban Location-Based Services. Sensors 2016, 16, 2201. [Google Scholar] [CrossRef] [PubMed]
- Won, J.H.; Dötterböck, D.; Eissfeller, B. Performance Comparison of Different Forms of Kalman Filter Approaches for a Vector-Based GNSS Signal Tracking Loop. J. Inst. Navig. 2014, 57, 185–199. [Google Scholar] [CrossRef]
- Jiang, R.; Wang, K.; Wang, J. Performance analysis and design of the optimal frequency-assisted phase tracking loop. GPS Solut. 2017, 21, 759–768. [Google Scholar] [CrossRef]
- Falco, G.; Pini, M.; Marucco, G. Loose and Tight GNSS/INS Integrations: Comparison of Performance Assessed in Real Urban Scenarios. Sensors 2017, 17, 27. [Google Scholar] [CrossRef] [PubMed]
- Ruotsalainen, L.; Kirkko-Jaakkola, M.; Bhuiyan, Z.; Söderholm, S.; Thombre, S.; Kuusniemi, H. Deeply Coupled GNSS, INS and Visual Sensor Integration for Interference Mitigation. In Proceedings of the ION GNSS+ 2014, Tampa, FL, USA, 8–12 September 2014; pp. 2243–2249. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Boston, MA, USA, 2013; ISBN 978-1-60807-005-3. [Google Scholar]
- Tawk, Y.; Tomé, P.; Botteron, C.; Stebler, Y.; Farine, P.A. Implementation and Performance of a GPS/INS Tightly Coupled Assisted PLL Architecture Using MEMS Inertial Sensors. Sensors 2014, 14, 3768–3796. [Google Scholar] [CrossRef] [PubMed]
- Vafamand, N.; Arefi, M.M.; Khayatian, A. Nonlinear system identification based on Takagi-Sugeno fuzzy modelling and unscented Kalman filter. ISA Trans. 2018, 74, 134–143. [Google Scholar] [CrossRef] [PubMed]
- Meda-Campana, J.A. Estimation of complex systems with parametric uncertainties using a JSSF heuristically adjusted. IEEE Lat. Am. Trans. 2018, 16, 350–357. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- De Jesús Rubio, J. Stable Kalman filter and neural network for the chaotic systems identification. J. Frankl. Inst. 2017, 354, 7444–7462. [Google Scholar] [CrossRef]
- Rubio, J.D.; Lughofer, E.; Plamen, A.; Novoa, J.F.; Meda-Campaña, J.A. A novel algorithm for the modelling of complex processes. Kybernetika 2018, 54, 79–95. [Google Scholar]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.J. Particle Filters for Positioning, Navigation and Tracking; Linköping University Electronic Press: Linköping, Sweden, 2001. [Google Scholar]
- Ghirmai, T. Distributed Particle Filter for Target Tracking: With Reduced Sensor Communications. Sensors 2016, 16, 1454. [Google Scholar] [CrossRef] [PubMed]
- Giremus, A.; Tourneret, J.-Y. Controlling particle filter regularization for GPS/INS hybridization. In Proceedings of the 2006 14th European Signal Processing Conference, Florence, Italy, 4–8 September 2006; pp. 1–5. [Google Scholar]
- Rabbou, M.A.; El-Rabbany, A. Integration of GPS precise point positioning and MEMS-based INS using unscented particle filter. Sensors 2015, 15, 7228–7245. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Stefan, K.; Otmar, L. INS/GPS Tightly-coupled Integration using Adaptive Unscented Particle Filter. J. Navig. 2010, 63, 491–511. [Google Scholar] [CrossRef]
- Gebre-Egziabher, D.; Gleason, S. GNSS Applications and Methods; Artech House: Norwood, MA, USA, 2009. [Google Scholar]
- Storvik, G. Particle filters for state-space models with the presence of unknown static parameters. IEEE Trans. Signal Process. 2002, 50, 281–289. [Google Scholar] [CrossRef]
- Fox, D. KLD-sampling: Adaptive particle filters. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, UK, 9–14 December 2002; pp. 713–720. [Google Scholar]
- Özkan, E.; Šmídl, V.; Saha, S.; Lundquist, C.; Gustafsson, F. Marginalized adaptive particle filtering for nonlinear models with unknown time-varying noise parameters. Automatica 2013, 49, 1566–1575. [Google Scholar] [CrossRef]
- Rabiei, E.; Droguett, E.L.; Modarres, M. Fully Adaptive Particle Filtering Algorithm for Damage Diagnosis and Prognosis. Entropy 2018, 20, 100. [Google Scholar] [CrossRef]
- Fox, D. Adapting the sample size in particle filters through KLD-sampling. Int. J. Robot. Res. 2003, 22, 985–1003. [Google Scholar] [CrossRef]
- Liu, Z.; Shi, Z.; Zhao, M.; Xu, W. Mobile robots global localization using adaptive dynamic clustered particle filters. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1059–1064. [Google Scholar]
- Cen, G.; Matsuhira, N.; Hirokawa, J.; Ogawa, H.; Hagiwara, I. New Entropy-Based Adaptive Particle Filter for Mobile Robot Localization. Adv. Robot. 2009, 23, 1761–1778. [Google Scholar] [CrossRef]
- Evennou, F.; Marx, F.; Novakov, E. Map-aided indoor mobile positioning system using particle filter. In Proceedings of the 2005 IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 13–17 March 2005; pp. 2490–2494. [Google Scholar]
- Heirich, O.; Robertson, P.; Garcia, A.C.; Strang, T. Bayesian train localization method extended by 3D geometric railway track observations from inertial sensors. In Proceedings of the 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 416–423. [Google Scholar]
- Liu, J.; Cai, B.-G.; Wang, J. Track-constrained GNSS/odometer-based train localization using a particle filter. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 877–882. [Google Scholar]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. In IEE Proceedings F (Radar and Signal Processing); IET: London, UK, 1993; pp. 107–113. [Google Scholar]
- Ristic, B.; Arulampalam, S.; Gordon, N. Beyond the Kalman Filter: Particle Filters for Tracking Applications; Artech House: Norwood, MA, USA, 2003. [Google Scholar]
- Doucet, A.; Godsill, S.; Andrieu, C. On sequential Monte Carlo sampling methods for Bayesian filtering. Stat. Comput. 2000, 10, 197–208. [Google Scholar] [CrossRef]
- Liu, J.S.; Chen, R. Sequential Monte Carlo Methods for Dynamic Systems. J. Am. Stat. Assoc. 1998, 93, 1032–1044. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stand-Alone | Nominal EPF | Adaptive EPF | Adaptive EPF after Convergence | |
|---|---|---|---|---|
| Position error mean (m) | 2.938 | 3.083 | 1.275 | 1.104 |
| Position error variance | 0.132 | 0.506 | 0.724 | 0.169 |
| Stand-Alone | Nominal EPF | Adaptive EPF | Adaptive EPF after Convergence | |
|---|---|---|---|---|
| Position error mean (m) | 0.537 | 0.653 | 0.578 | 0.457 |
| Position error variance | 0.064 | 0.084 | 0.389 | 0.034 |
| Stand-Alone | Nominal EPF | Adaptive EPF | Adaptive EPF after Convergence | |
|---|---|---|---|---|
| Position error mean (m) | 0.045 | 0.414 | 0.217 | 0.074 |
| Position error variance | 0.015 | 0.040 | 0.449 | 0.014 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, C.; Cai, B.; Wang, J.; Kealy, A. DTM-Aided Adaptive EPF Navigation Application in Railways. Sensors 2018, 18, 3860. https://doi.org/10.3390/s18113860
Jin C, Cai B, Wang J, Kealy A. DTM-Aided Adaptive EPF Navigation Application in Railways. Sensors. 2018; 18(11):3860. https://doi.org/10.3390/s18113860
Chicago/Turabian StyleJin, Chengming, Baigen Cai, Jian Wang, and Allison Kealy. 2018. "DTM-Aided Adaptive EPF Navigation Application in Railways" Sensors 18, no. 11: 3860. https://doi.org/10.3390/s18113860
APA StyleJin, C., Cai, B., Wang, J., & Kealy, A. (2018). DTM-Aided Adaptive EPF Navigation Application in Railways. Sensors, 18(11), 3860. https://doi.org/10.3390/s18113860