A Data Correction Algorithm for Low-Frequency Floating Car Data



Abstract
1. Introduction
2. Related Work
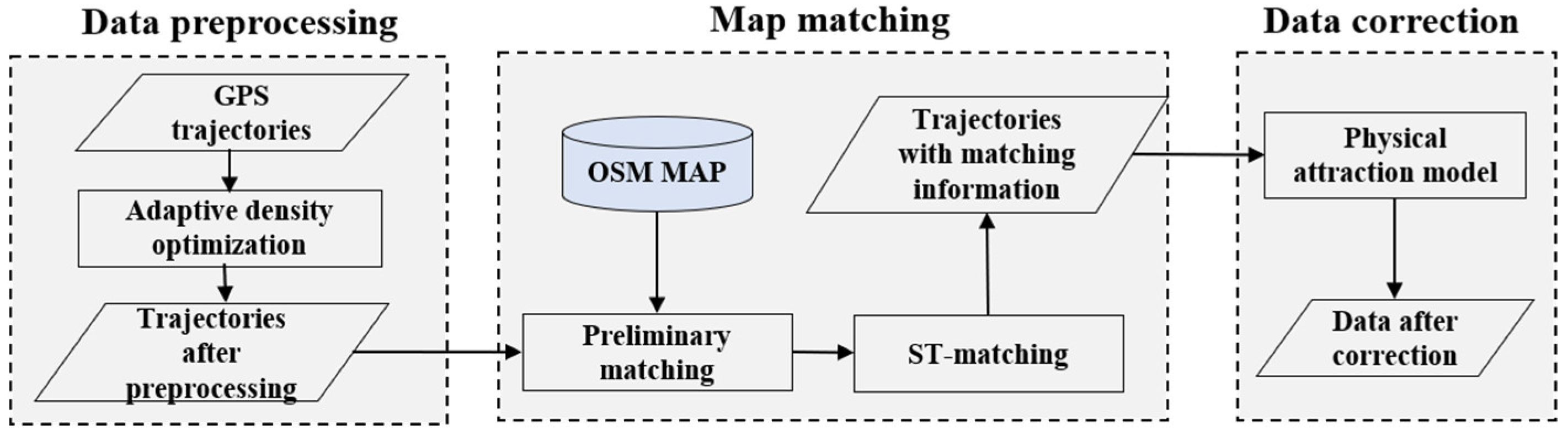
3. Data Correction Algorithm
3.1. Problem Statement
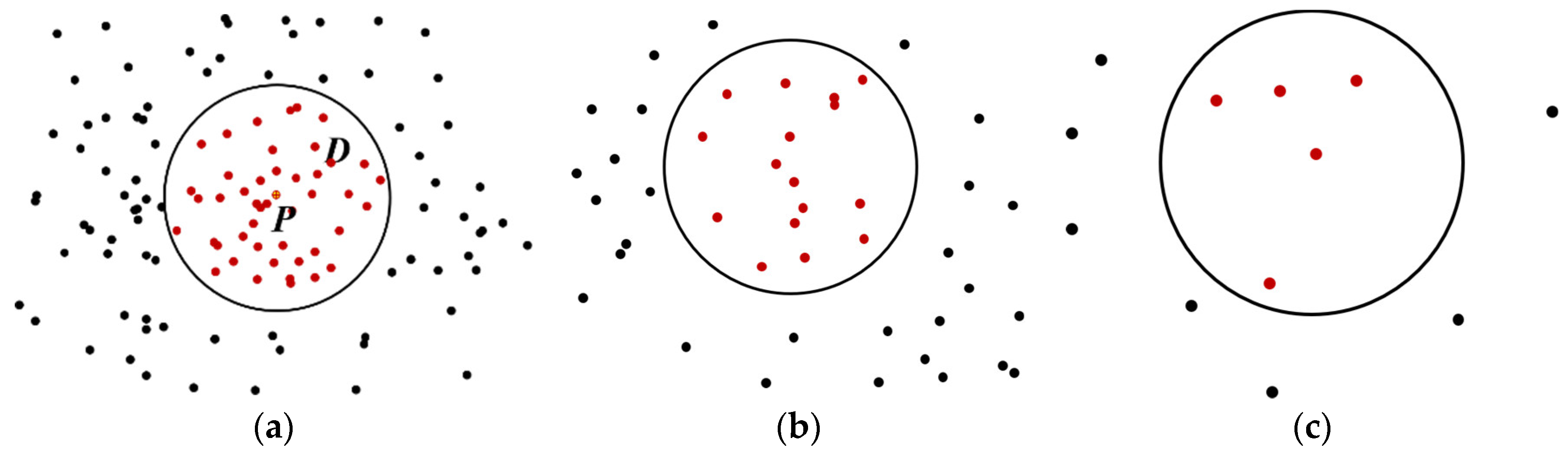
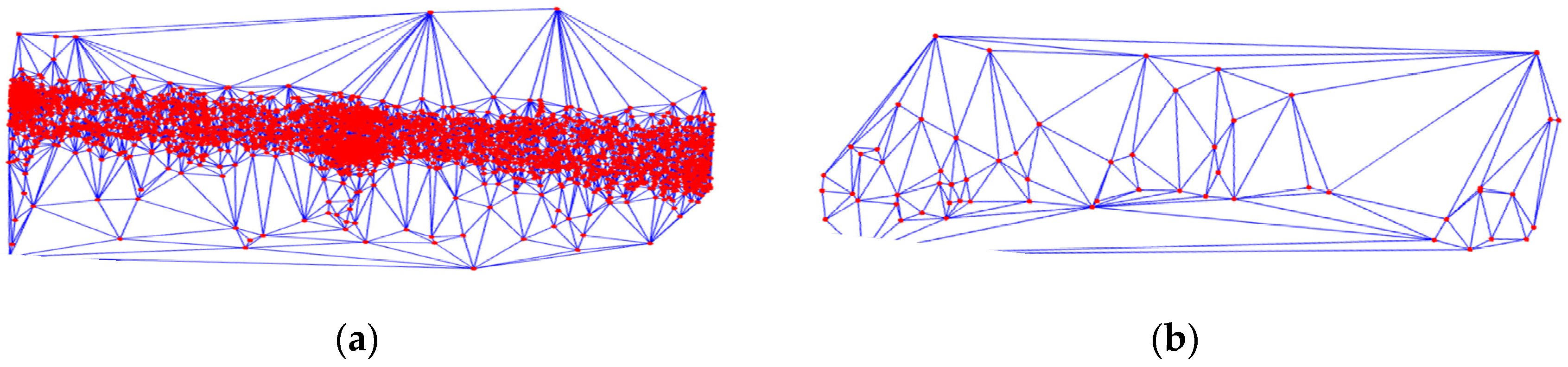
3.2. Trajectory Preprocessing
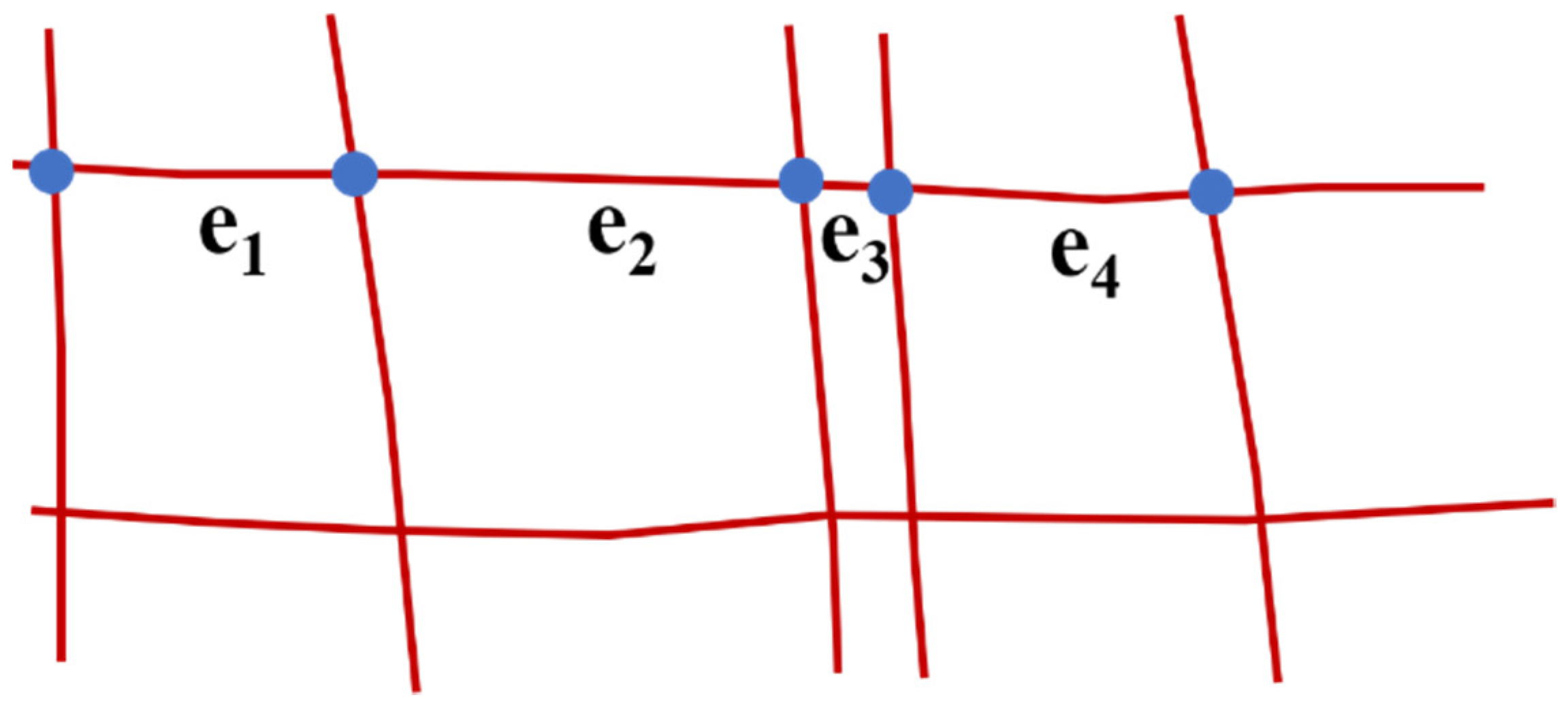
3.3. Hierarchical Map Matching Algorithm (HST-Matching)
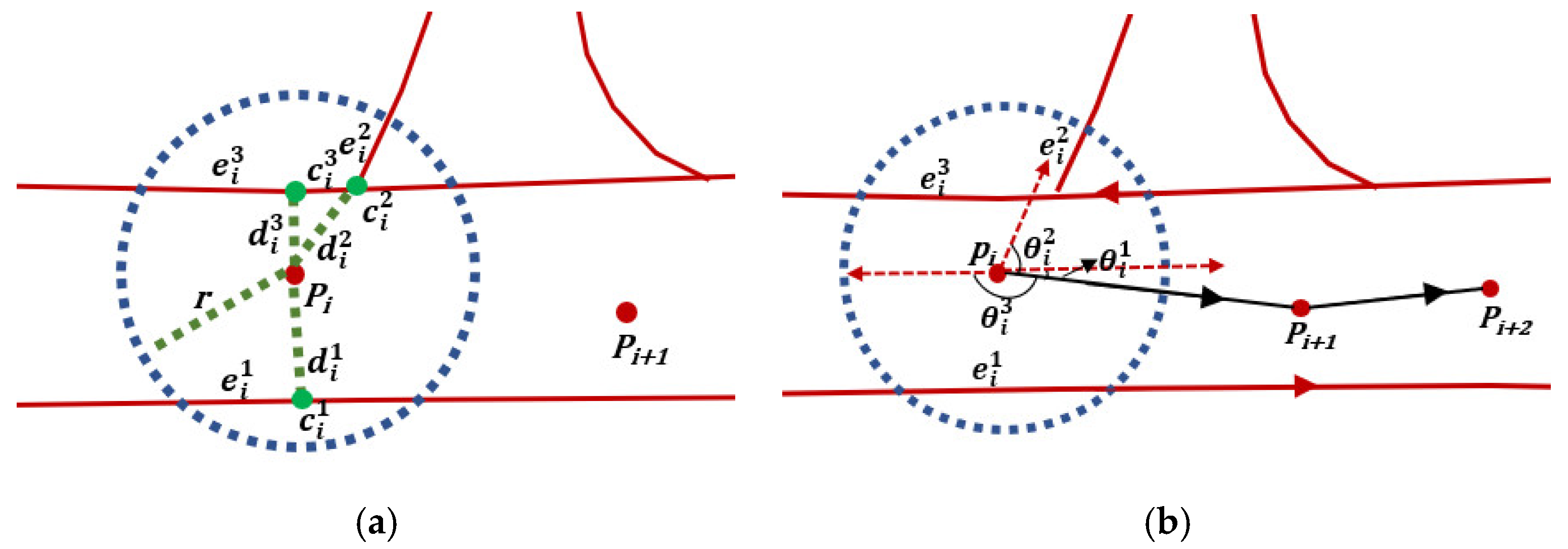
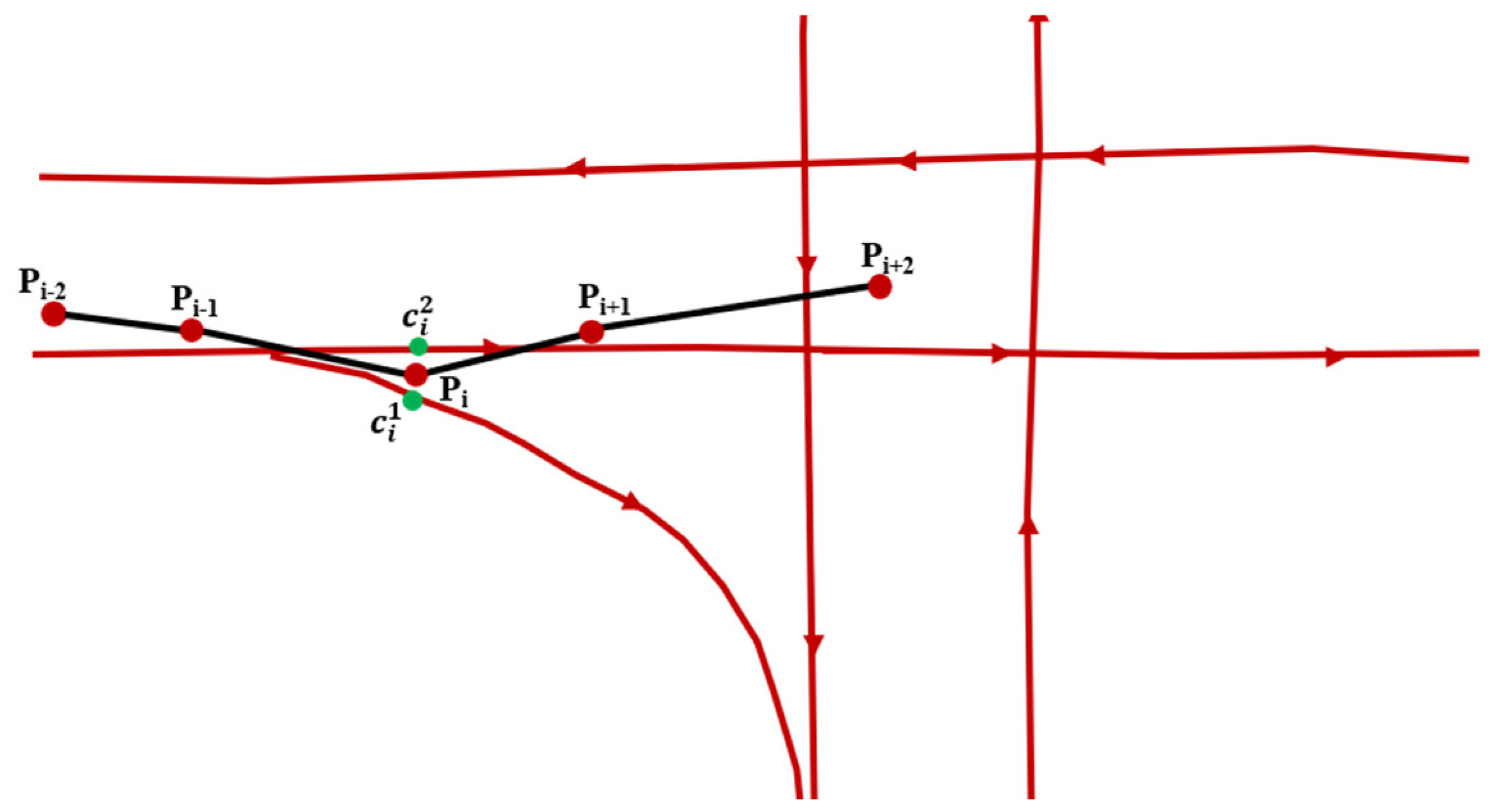
3.3.1. Preliminary Matching
| Algorithm 1 Preliminary Matching Algorithm | |
| Input: | Trajectory P1 → P2 … → Pn; OSM road network R |
| Output: | HCTPlist; Candidate matched points list , … |
| 1: | Initialize HCTPlist and CanditateList as empty list; |
| 2: | fori = 1 to n do |
| 3: | C = GetCandidate (Pi, R, r); //get the candidates within radius r |
| 4: | for j = 1 to C.count do |
| 5: | = |azi_Pi-azi_|; |
| 6: | if < then |
| 7: | CandidatedList.add (); |
| 8: | end if |
| 9: | end for |
| 10: | if CandidateList.count == 1 then |
| 11: | HCTPlist.add (Pi); |
| 12: | end if |
| 13: | end for |
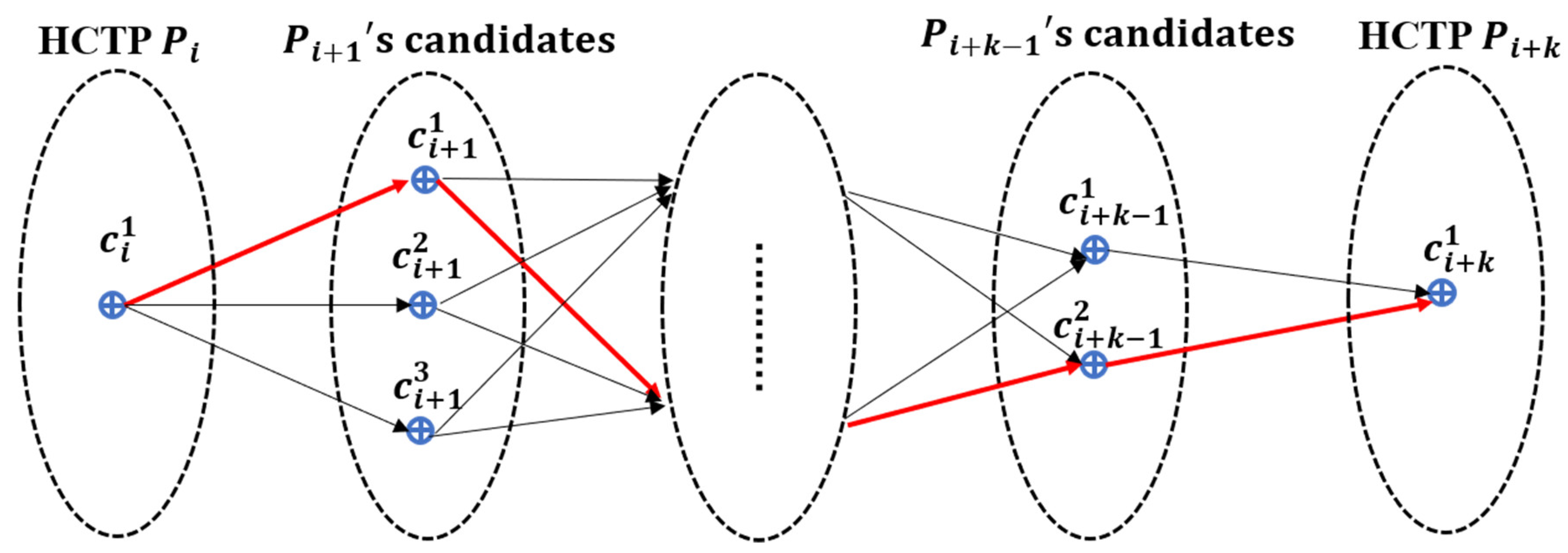
3.3.2. Spatial–Temporal Matching
Spatial Analysis
Temporal Analysis
| Algorithm 2 Spatial and Temporal Matching Algorithm | |
| Input: | HCTPlist Pi, Pi+k; CandidateList , … ; Trajetory Pi+1 → Pi+2 … → Pi+k |
| Output: | OSM-WayID-List; |
| 1: | Initialize OSM-WayID-List as empty list; |
| 2: | for each and do |
| 3: | F() = 1; |
| 4: | F() = 1; |
| 5: | end for |
| 6: | for t = i + 1 to i + k − 1 do |
| 7: | max = −∞; |
| 8: | for s = 1 to candidateList(Pt).count do |
| 9: | F() = F() + F( → ); |
| 10: | Alt = F(); |
| 11: | if (Alt > max) then |
| 12: | max = Alt; |
| 13: | C = max. ; |
| 14: | end if |
| 15: | end for |
| 16: | OSM-WayID-List.add(C.id); |
| 17: | end for |
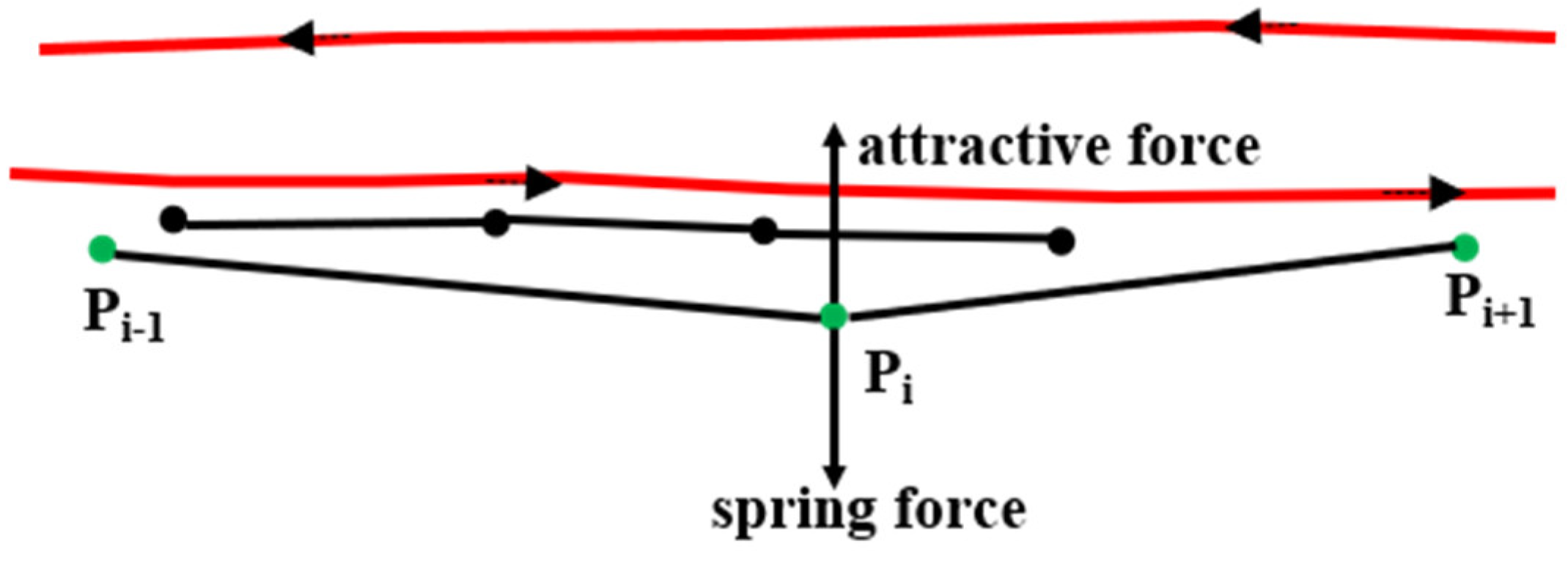
3.4. Trajectory Correction Algorithm
| Algorithm 3 Physical Attraction Model | |
| Input: | Trajectory P1 → P2 → Pn; OSM-WayID-List; |
| Output: | New Trajectory → … → ; |
| 1: | fort = 1 to n do |
| 2: | T = 0; K = ∞; |
| 3: | = meandistance (d1, d2 … dn); |
| 4: | K = di − ; |
| 5: | While T ≤ 20 && K > 0.5 do |
| 6: | F1(Pi) = F2(Pi); |
| 7: | = meandistance (); |
| 8: | K = − ; |
| 9: | T = T + 1; |
| 10: | end while |
| 11: | end for |
4. Experimental Tests of the Proposed Approach
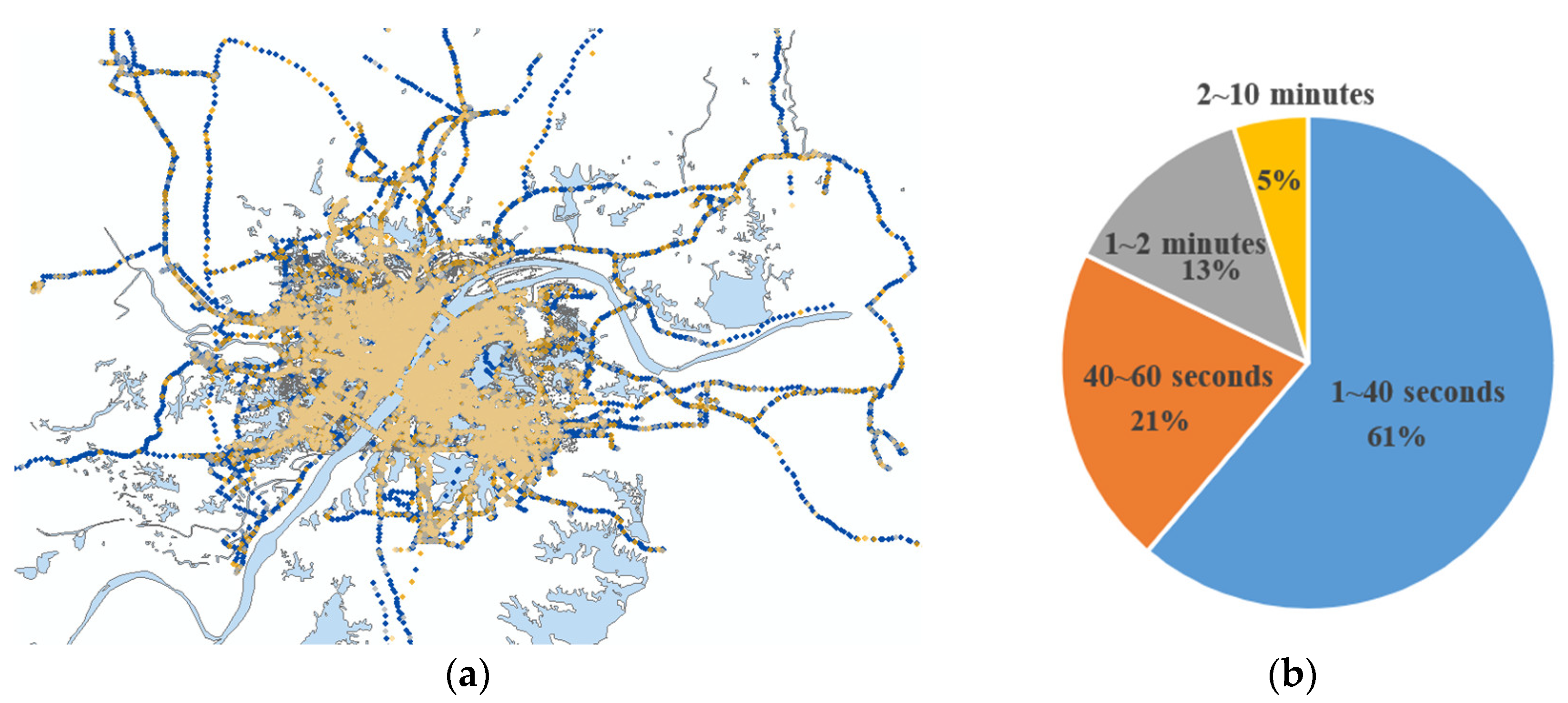
4.1. Experimental Data
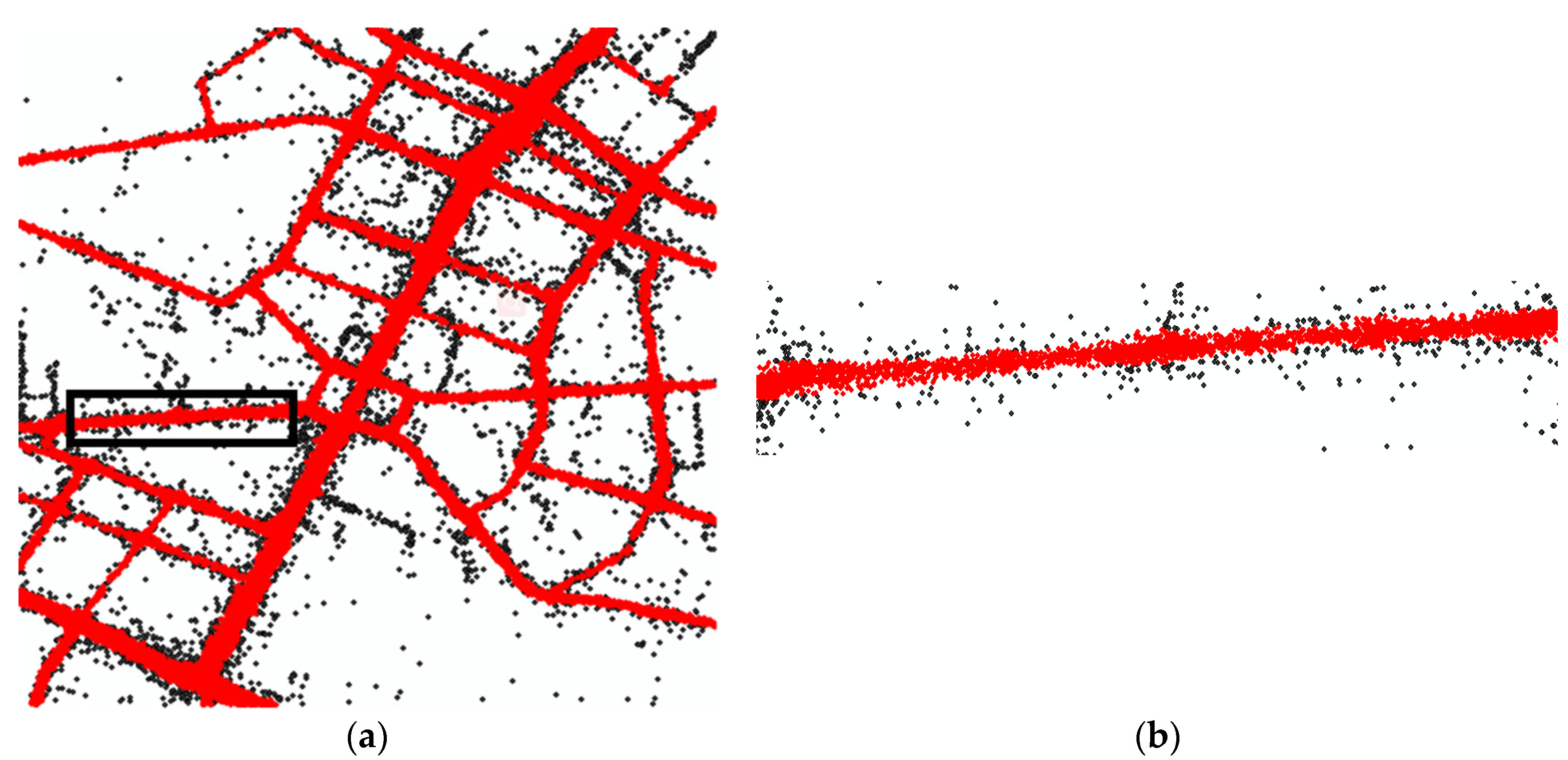
4.2. Trajectory Preprocessing
4.3. Map Matching
4.3.1. Evaluation Approach
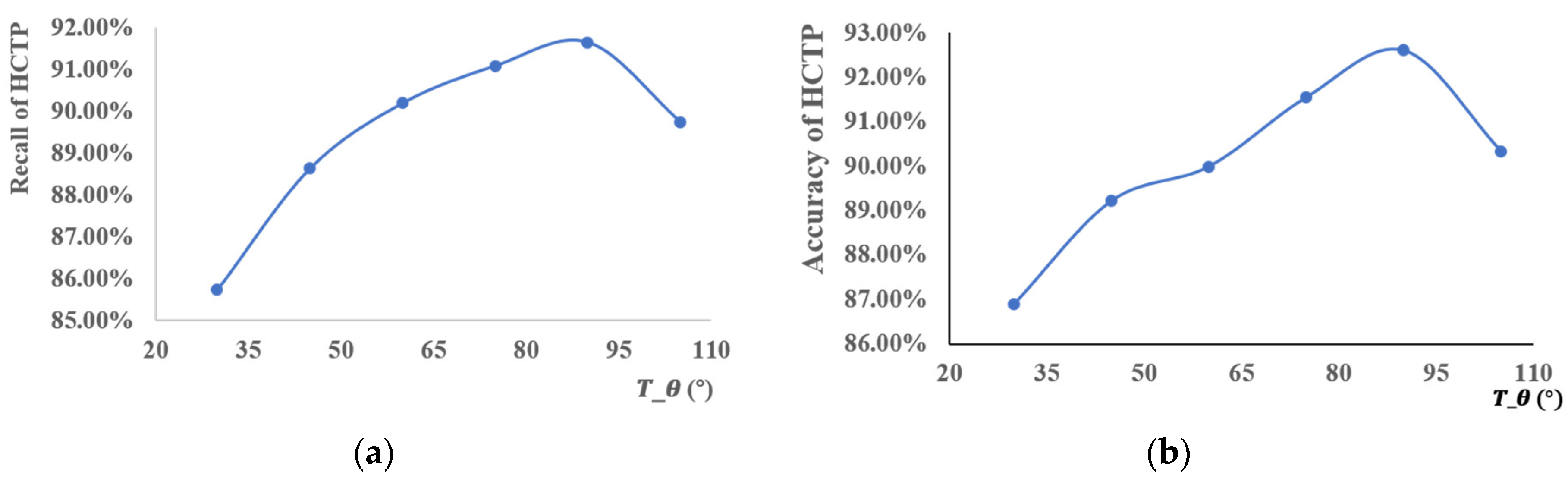
4.3.2. Parameter Selection
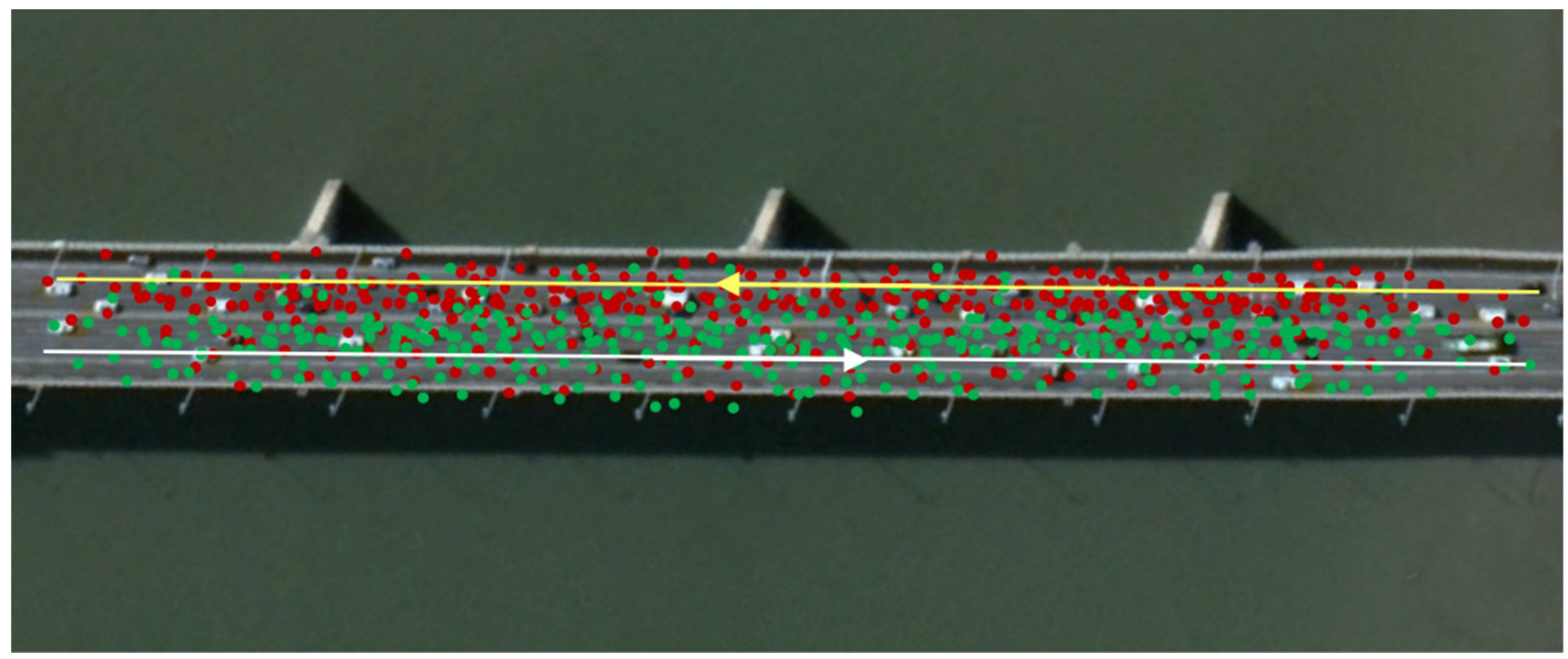
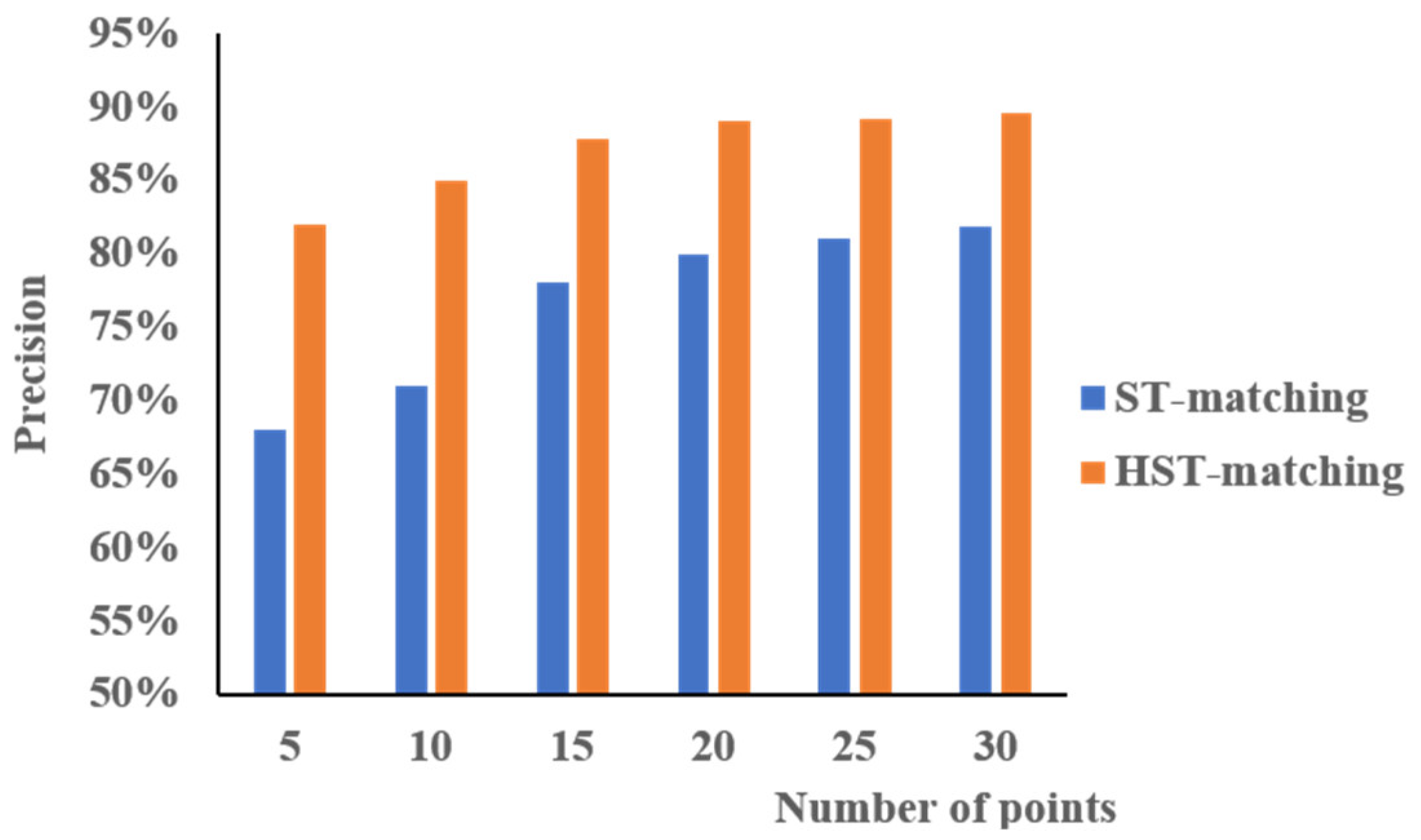
4.3.3. Matching Result
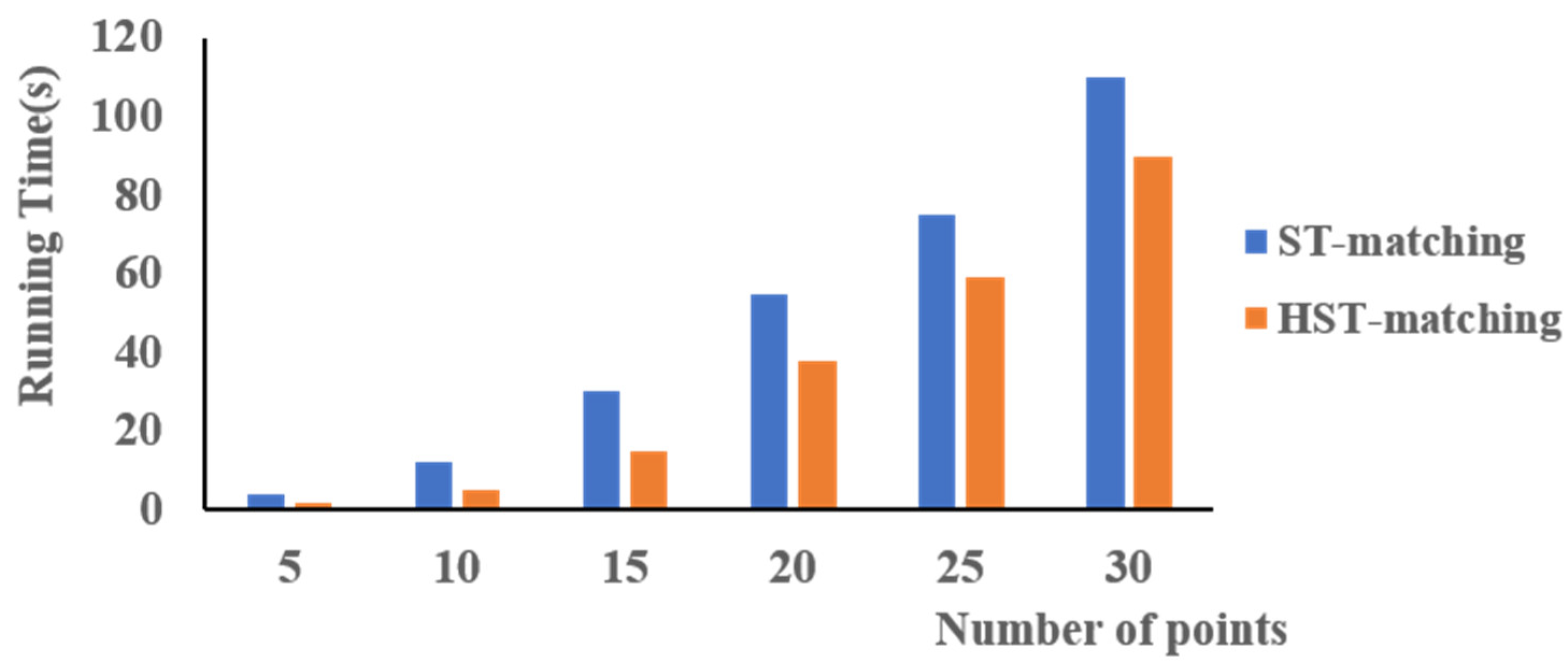
4.3.4. Running Time
4.4. Data Correction
4.4.1. Parameter Selection
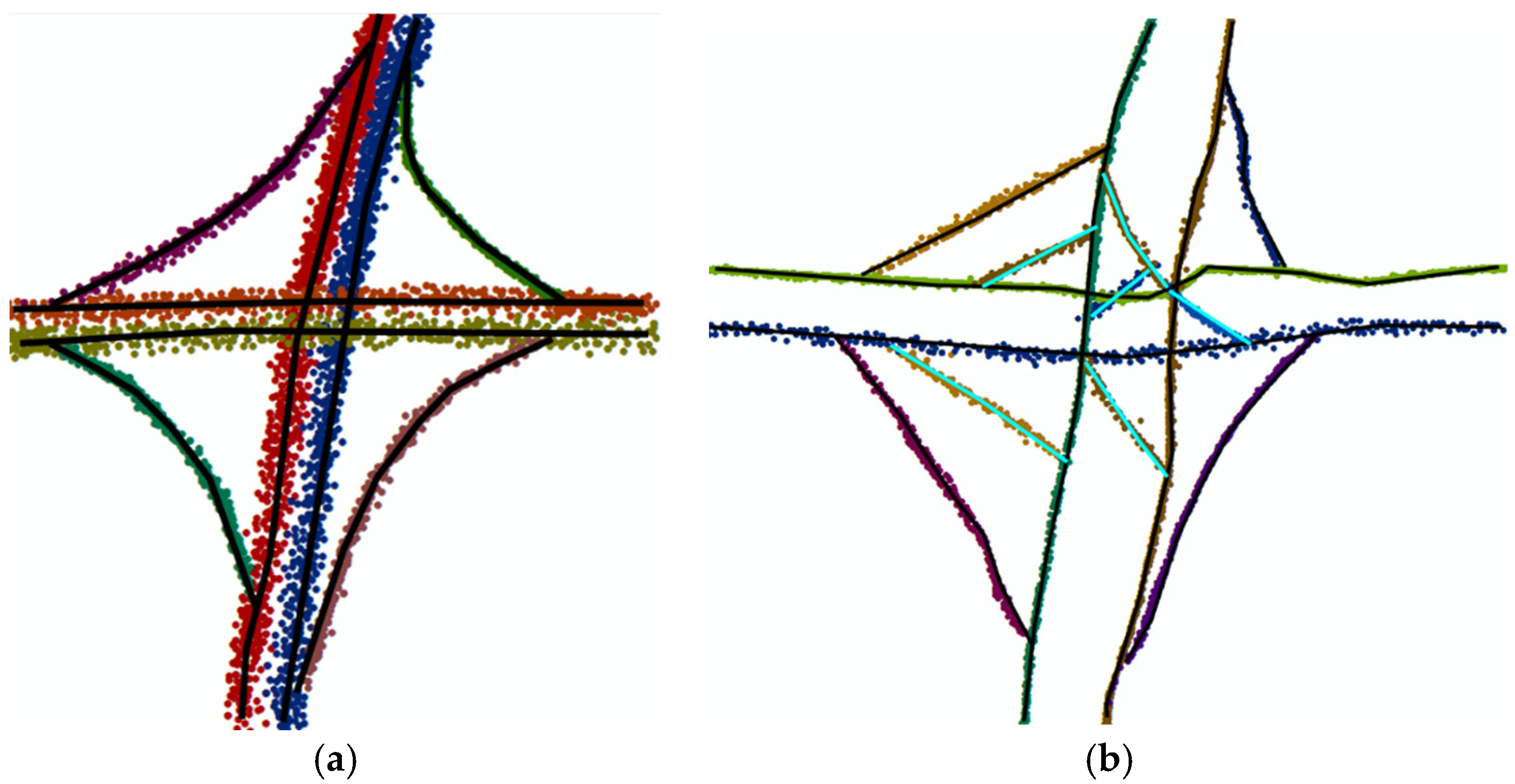
4.4.2. Correction Result
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gwon, G.P.; Hur, W.S.; Kim, S.W.; Seo, S.W. Generation of a Precise and Efficient Lane-Level Road Map for Intelligent Vehicle Systems. IEEE Trans. Veh. Technol. 2017, 66, 4517–4533. [Google Scholar] [CrossRef]
- Li, Y.; Hua, L.; Tan, J.; Zan, L.; Hong, X.; Chen, C. Scan Line Based Road Marking Extraction from Mobile LiDAR Point Clouds. Sensors 2016, 16, 903. [Google Scholar] [CrossRef]
- Guo, C.; Kidono, K.; Meguro, J.; Kojima, Y.; Ogawa, M.; Naito, T. A Low-Cost Solution for Automatic Lane-Level Map Generation Using Conventional In-Car Sensors. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2355–2366. [Google Scholar] [CrossRef]
- Tang, L.; Yang, X.; Kan, Z.; Li, Q. Lane-Level Road Information Mining from Vehicle GPS Trajectories Based on Naïve Bayesian Classification. ISPRS Int. J. Geo-Inf. 2015, 4, 2660–2680. [Google Scholar] [CrossRef]
- Tang, L.; Yang, X.; Dong, Z.; Li, Q. CLRIC: Collecting Lane-Based Road Information via Crowdsourcing. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2552–2562. [Google Scholar] [CrossRef]
- Li, J.; Qin, Q.; Xie, C.; Zhao, Y. Integrated use of spatial and semantic relationships for extracting road networks from floating car data. Int. J. Appl. Earth Obs. Geoinf. 2012, 19, 238–247. [Google Scholar] [CrossRef]
- Wang, J.; Rui, X.; Song, X.; Tan, X. A novel approach for generating routable road maps from vehicle GPS traces. Int. J. Geogr. Inf. Syst. 2015, 29, 69–91. [Google Scholar] [CrossRef]
- Liu, X.; Biagioni, J.; Eriksson, J.; Wang, Y.; Forman, G.; Zhu, Y. Mining large-scale, sparse GPS traces for map inference: Comparison of approaches. In Proceedings of the 18th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Beijing, China, 12–16 August 2012; pp. 669–677. [Google Scholar]
- Biagioni, J.; Eriksson, J. Map inference in the face of noise and disparity. In Proceedings of the International Conference on Advances in Geographic Information Systems, Redondo Beach, CA, USA, 6–9 November 2012; pp. 79–88. [Google Scholar]
- Worrall, S.; Nebot, E. Automated Process for Generating Digitised Maps through GPS Data Compression; University of Sydney: Sydney, Australia, 2007. [Google Scholar]
- Schroedl, S.; Wagstaff, K.; Rogers, S.; Langley, P.; Wilson, C. Mining GPS Traces for Map Refinement. Data Min. Knowl. Discov. 2004, 9, 59–87. [Google Scholar] [CrossRef]
- Lee, J.G.; Han, J.; Whang, K.Y. Trajectory clustering:a partition-and-group framework. In Proceedings of the ACM SIGMOD International Conference on Management of Data, Beijing, China, 12–14 June 2007; pp. 593–604. [Google Scholar]
- Lee, W.-C.; Krumm, J. Trajectory Preprocessing. In Computing with Spatial Trajectories; Springer: New York, NY, USA, 2011; pp. 3–33. ISBN 978-1-4614-1628-9. [Google Scholar]
- Fox, D. Adapting the Sample Size in Particle Filters Through KLD-Sampling, Adapting the Sample Size in Particle Filters Through KLD-Sampling. Int. J. Robot. Res. 2003, 22, 985–1003. [Google Scholar] [CrossRef]
- Hightower, J.; Borriello, G. Particle Filters for Location Estimation in Ubiquitous Computing: A Case Study. In UbiComp 2004: Ubiquitous Computing; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2004; pp. 88–106. [Google Scholar]
- Murphy, K.; Russell, S. Rao-Blackwellised Particle Filtering for Dynamic Bayesian Networks. In Sequential Monte Carlo Methods in Practice; Statistics for Engineering and Information Science; Springer: New York, NY, USA, 2001; pp. 499–515. ISBN 978-1-4419-2887-0. [Google Scholar]
- Lou, Y.; Zhang, C.; Zheng, Y.; Xie, X.; Wang, W.; Huang, Y. Map-matching for Low-sampling-rate GPS Trajectories. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 4–6 November 2009; ACM: New York, NY, USA, 2009; pp. 352–361. [Google Scholar]
- Greenfeld, J.S. Matching GPS Observations to Locations on a Digital Map. In Proceedings of the 81th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 14 January 2002. [Google Scholar]
- Qingquan, L.I.; Lian, H. A Map Matching Algorithm for GPS Tracking Data. Acta Geod. Cartogr. Sin. 2010, 39, 207–212. [Google Scholar]
- Zhe, Z.; Qingquan, L.I.; Zou, H.; Wan, J.; University, S.; University, W. Curvature Integration Constrained Map Matching Method for GPS Floating Car Data. Acta Geod. Cartogr. Sin. 2015, 44, 1167–1176. [Google Scholar]
- Marchal, F.; Hackney, J.; Axhausen, K. Efficient Map Matching of Large Global Positioning System Data Sets: Tests on Speed-Monitoring Experiment in Zürich. Trans. Res. Rec. J. Transp. Res. Board 2005, 1935, 93–100. [Google Scholar] [CrossRef]
- Zhang, L.; Thiemann, F.; Sester, M. Integration of GPS traces with road map. In Proceedings of the International Workshop on Computational Transportation Science, San Jose, CA, USA, 2 November 2010; pp. 17–22. [Google Scholar]
- Liu, Q.; Tang, J.; Deng, M.; Shi, Y. An Iterative Detection and Removal Method for Detecting Spatial Clusters of Different Densities. Trans. GIS 2015, 19, 82–106. [Google Scholar] [CrossRef]
- Barron, C.; Neis, P.; Zipf, A. A Comprehensive Framework for Intrinsic OpenStreetMap Quality Analysis. Trans. GIS 2015, 18, 877–895. [Google Scholar] [CrossRef]
- Zhang, H.; Malczewski, J. Accuracy Evaluation of the Canadian OpenStreetMap Road Networks. Int. J. Geospat. Environ. Res. 2017, 5, 347. [Google Scholar]
- Wang, M.; Li, Q.; Hu, Q.; Zhou, M. Quality Analysis of Open Street Map Data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-2/W1, 155–158. [Google Scholar] [CrossRef]
- OpenStreetMap Wiki. Available online: https://wiki.openstreetmap.org/wiki/Main_Page (accessed on 7 September 2018).
- Yuan, J.; Zheng, Y.; Zhang, C.; Xie, X.; Sun, G.Z. An Interactive-Voting Based Map Matching Algorithm. In Proceedings of the Eleventh International Conference on Mobile Data Management, Kansas City, MI, USA, 23–26 May 2010; pp. 517–520. [Google Scholar]
- Fu, L.; Sun, D.; Rilett, L.R. Heuristic shortest path algorithms for transportation applications: State of the art. Comput. Oper. Res. 2006, 33, 3324–3343. [Google Scholar] [CrossRef]
- Cao, L.; Krumm, J. From GPS traces to a routable road map. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 4–6 November 2009; pp. 3–12. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | Motorway | Trunk | Primary | Secondary | Tertiary | Service | Residential |
|---|---|---|---|---|---|---|---|
| Min-speed (km/h) | 90 | 60 | 40 | 30 | 20 | 0 | 0 |
| Max-speed (km/h) | 120 | 100 | 60 | 50 | 40 | 20 | 15 |
| Threshold | Motorway | Trunk | Primary | Secondary | Tertiary | Service | Residential |
|---|---|---|---|---|---|---|---|
| 105 | 80 | 50 | 40 | 30 | 10 | 10 | |
| 5 | 7 | 3 | 3 | 3 | 3 | 1.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Guo, Y.; Zhou, J.; Cai, Y. A Data Correction Algorithm for Low-Frequency Floating Car Data. Sensors 2018, 18, 3639. https://doi.org/10.3390/s18113639
Li B, Guo Y, Zhou J, Cai Y. A Data Correction Algorithm for Low-Frequency Floating Car Data. Sensors. 2018; 18(11):3639. https://doi.org/10.3390/s18113639
Chicago/Turabian StyleLi, Bijun, Yuan Guo, Jian Zhou, and Yi Cai. 2018. "A Data Correction Algorithm for Low-Frequency Floating Car Data" Sensors 18, no. 11: 3639. https://doi.org/10.3390/s18113639
APA StyleLi, B., Guo, Y., Zhou, J., & Cai, Y. (2018). A Data Correction Algorithm for Low-Frequency Floating Car Data. Sensors, 18(11), 3639. https://doi.org/10.3390/s18113639