Three-Dimensional Terahertz Coded-Aperture Imaging Based on Single Input Multiple Output Technology



Abstract
:1. Introduction
2. Principle and Model
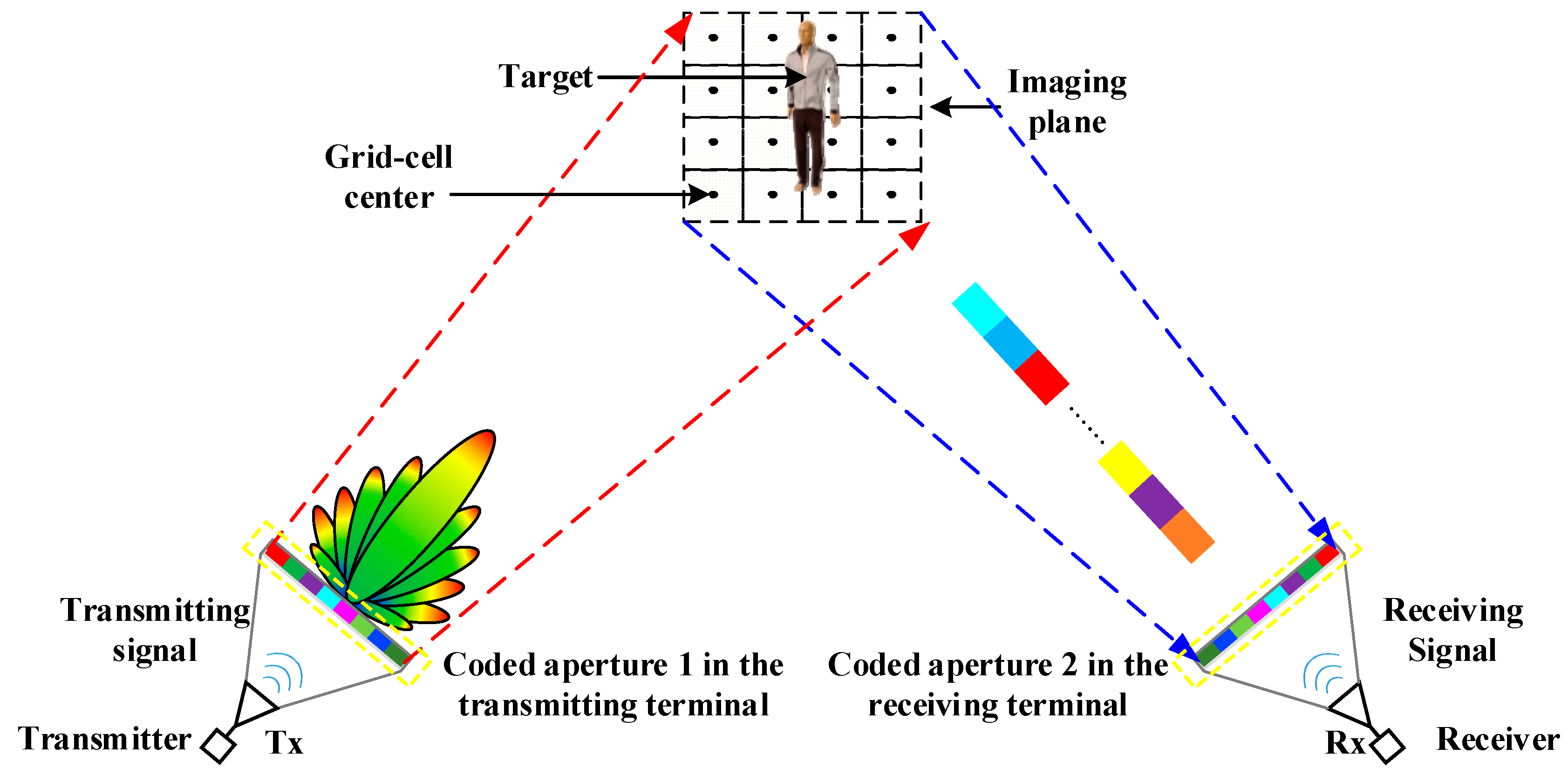
2.1. Conventional SISO TCAI Architecture
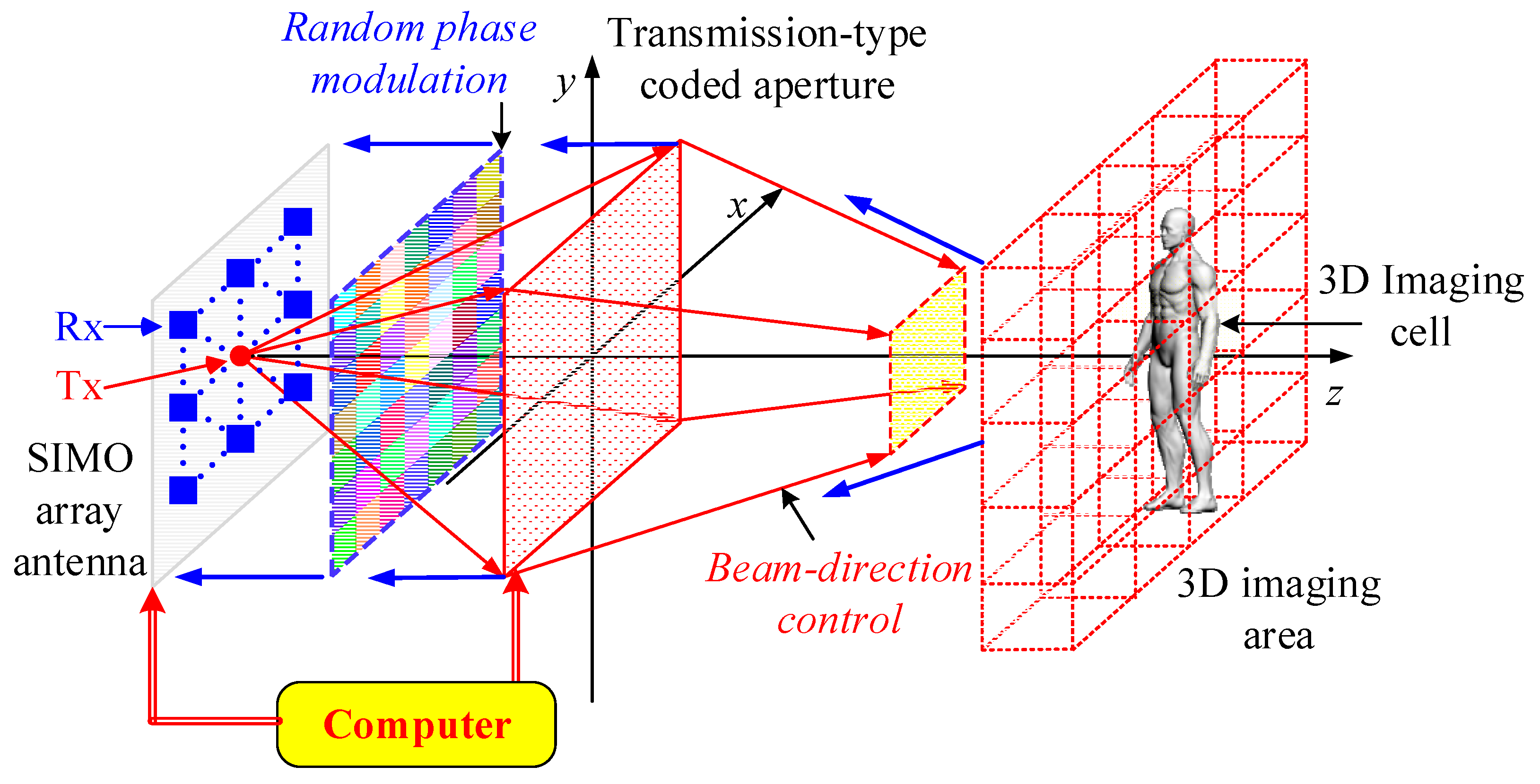
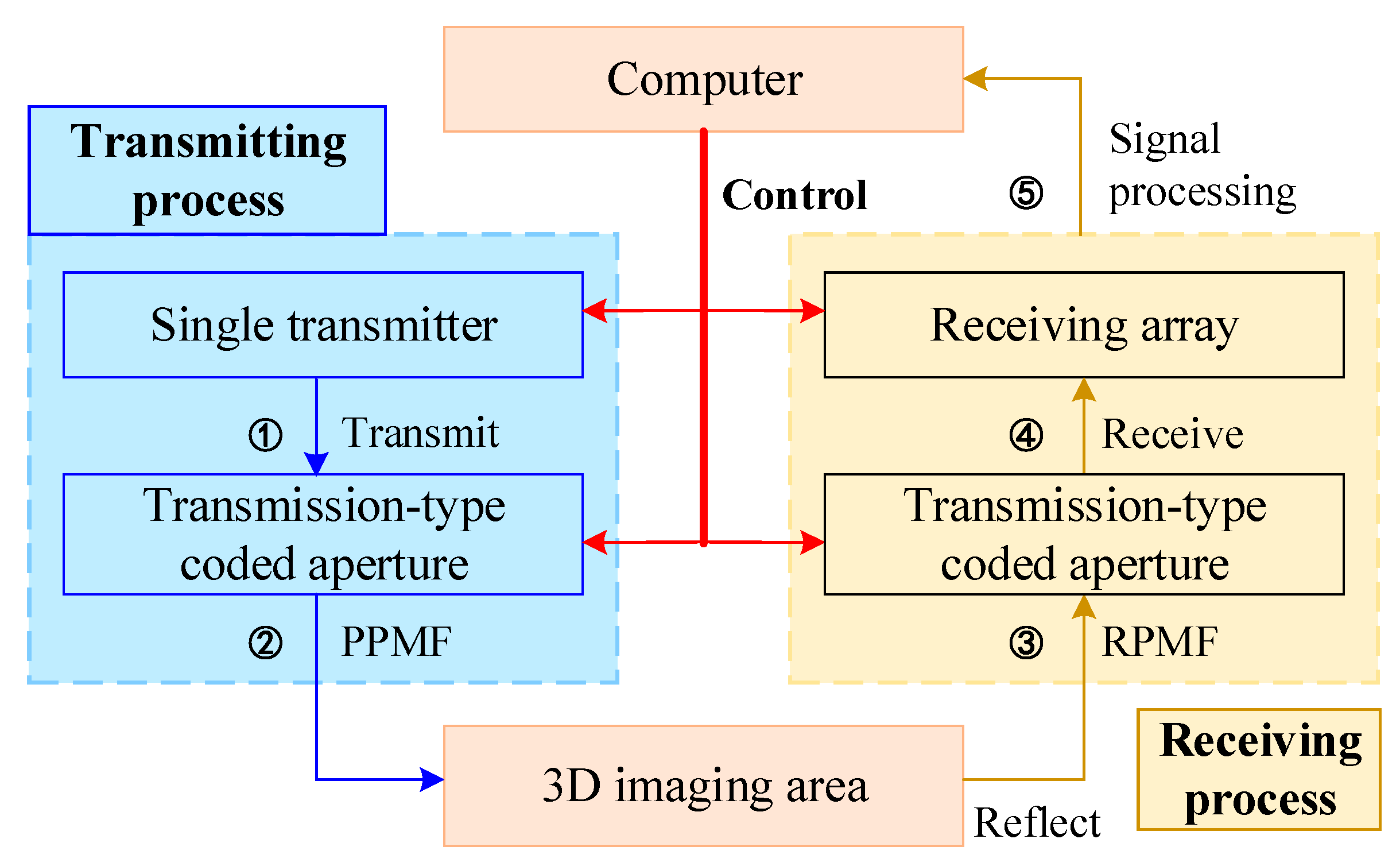
2.2. Proposed SIMO TCAI Architecture
3. Scanning and Imaging Method for 3D Target
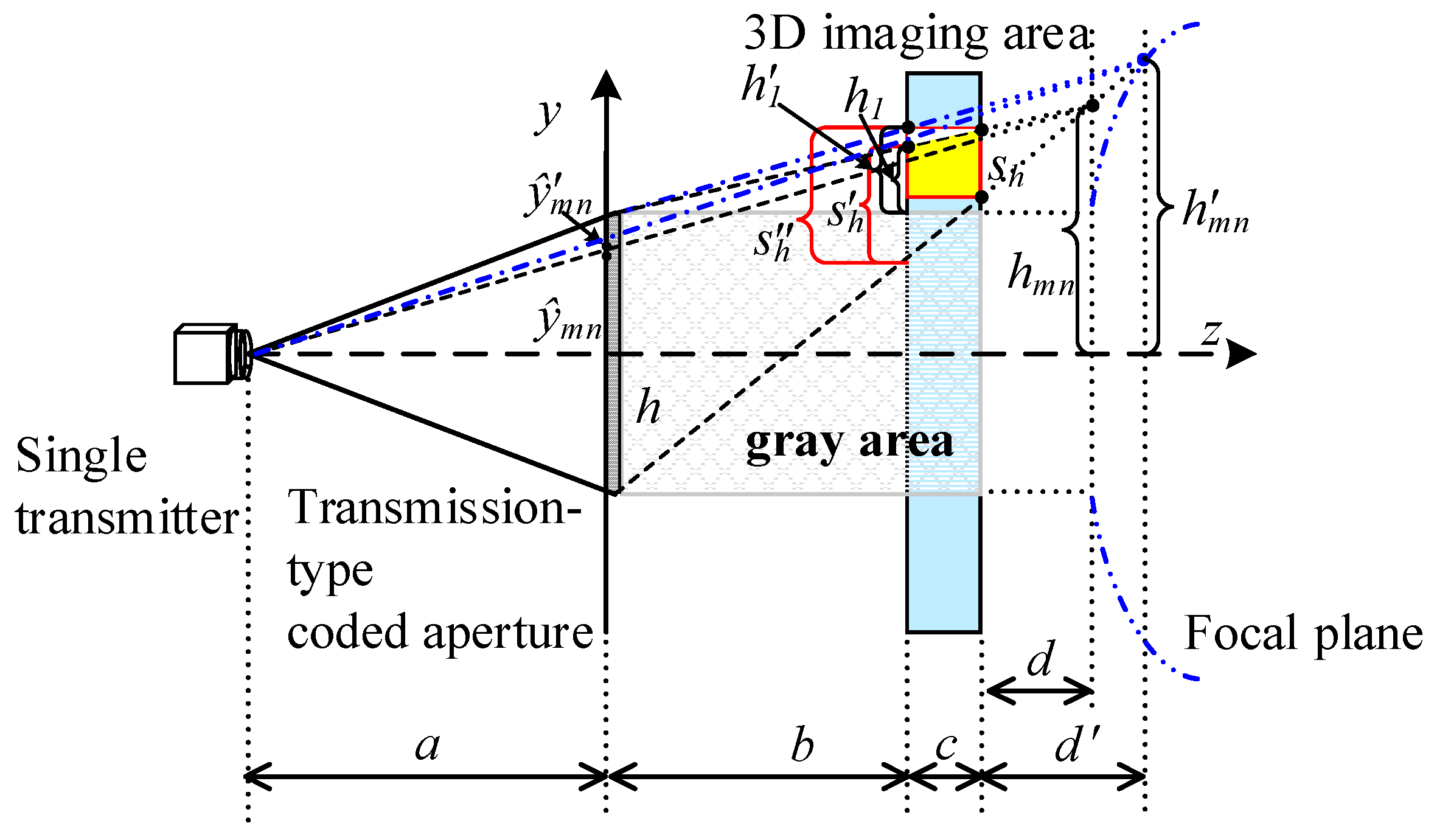
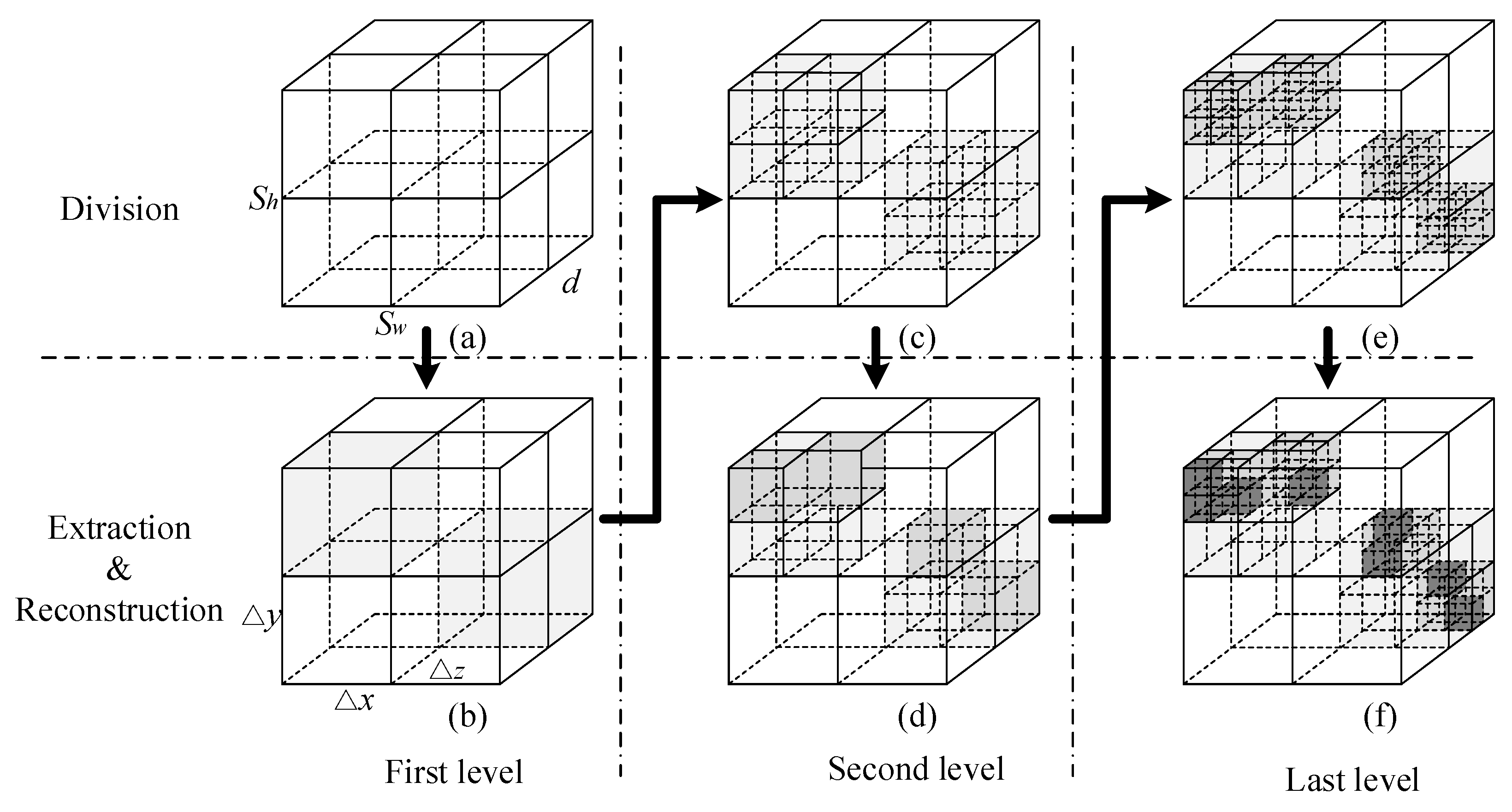
3.1. Scanning Method
3.2. Imaging Method
4. Numerical Simulations
4.1. Resolving Ability Analysis
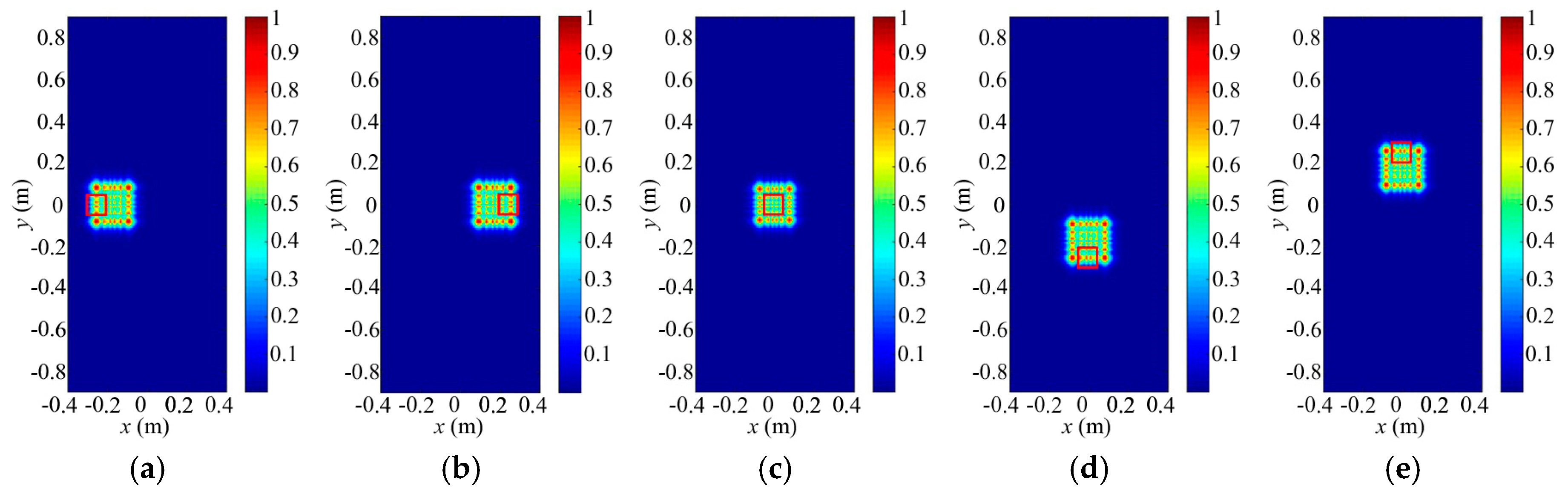
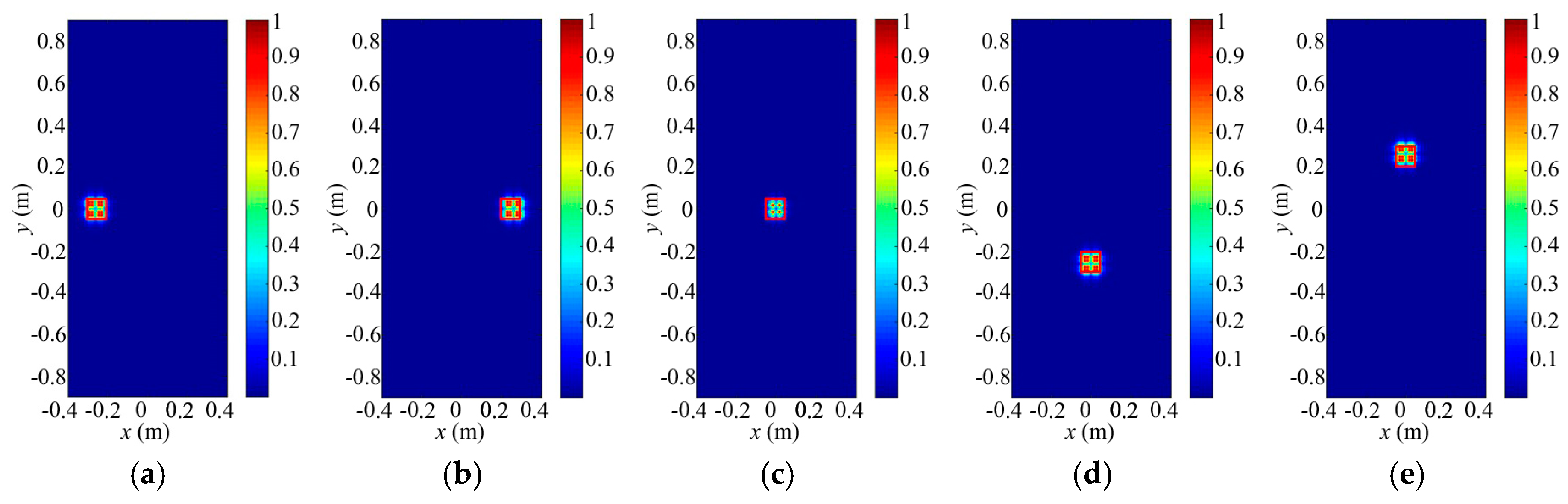
4.2. Scanning Ability Analysis
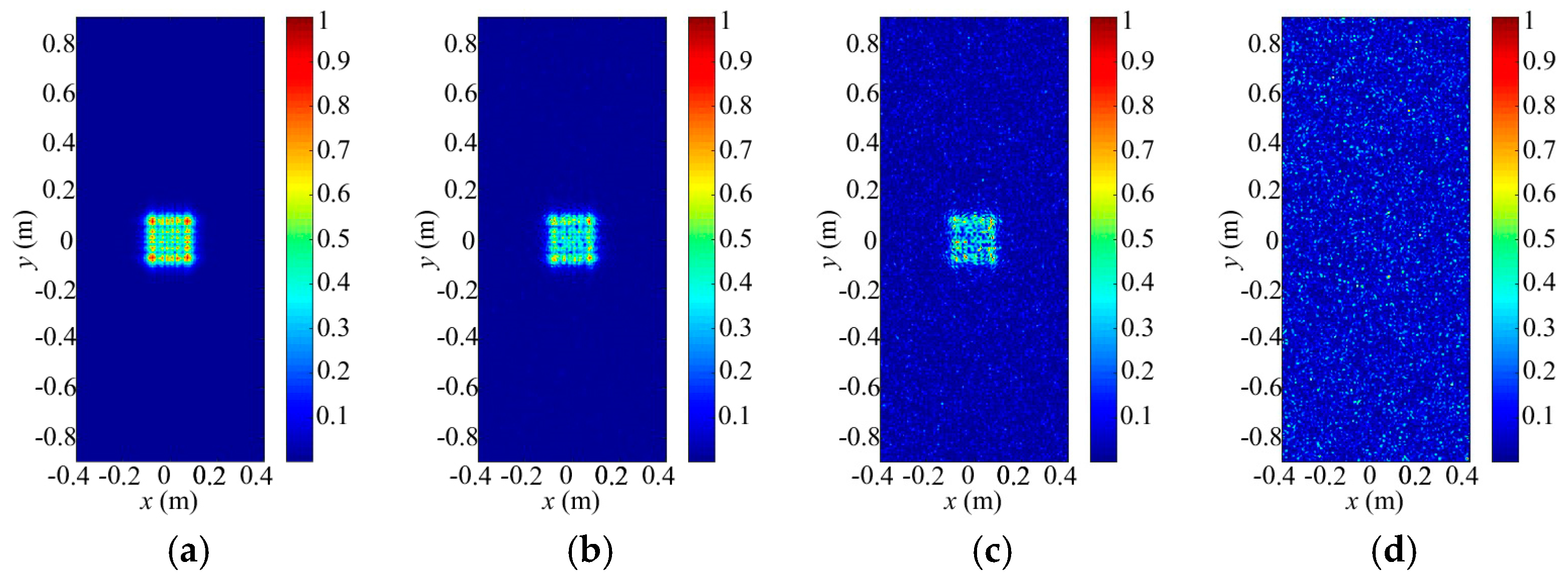
4.3. Working-Distance Analysis
4.4. Imaging Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tribe, W.R.; Taday, P.F.; Kemp, M.C. Hidden object detection: Security applications of terahertz technology. Proc. SPIE Int. Soc. Opt. Eng. 2004, 5354, 168–176. [Google Scholar]
- Sheen, D.M.; Hall, T.E.; Severtsen, R.H.; Mcmakin, D.L.; Hatchell, B.K.; Valdez, P.L. Standoff concealed weapon detection using a 350-GHz radar imaging system. Proc. SPIE Int. Soc. Opt. Eng. 2010, 7670, 115–118. [Google Scholar]
- Friederich, F.; Spiegel, W.V.; Bauer, M.; Meng, F.; Thomson, M.D.; Boppel, S.; Lisauskas, A.; Hils, B.; Krozer, V.; Keil, A.; et al. THz active imaging systems with real-time capabilities. IEEE Trans. Terahertz Sci. Technol. 2011, 1, 183–200. [Google Scholar] [CrossRef]
- Brown, W.M. Synthetic aperture radar. Encycl. Phys. Sci. Technol. 2003, AES-3, 451–465. [Google Scholar] [CrossRef]
- Ulander, L.M.H.; Hellsten, H.; Stenstrom, G. Synthetic-aperture radar processing using fast factorized back-projection. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 760–776. [Google Scholar] [CrossRef]
- Watts, C.M.; Shrekenhamer, D.; Montoya, J.; Lipworth, G.; Hunt, J.; Sleasman, T.; Krishna, S.; Smith, D.R.; Padilla, W.J. Terahertz compressive imaging with metamaterial spatial light modulators. Nat. Photonics 2014, 8, 605–609. [Google Scholar] [CrossRef]
- Li, Y.B.; Li, L.L.; Xu, B.B.; Wu, W.; Wu, R.Y.; Wan, X.; Cheng, Q.; Cui, T.J. Transmission-type 2-bit programmable metasurface for single-sensor and single-frequency microwave imaging. Sci. Rep. 2016, 6, 23731. [Google Scholar] [CrossRef] [PubMed]
- Gollub, J.N.; Yurduseven, O.; Trofatter, K.P.; Arnitz, D.; F Imani, M.; Sleasman, T.; Boyarsky, M.; Rose, A.; Pedross-Engel, A.; Odabasi, H.; et al. Large metasurface aperture for millimeter wave computational imaging at the human-scale. Sci. Rep. 2017, 7, 42650. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Tan, S.; Wu, J.; Li, E.; Shen, X.; Han, S. Spectral camera based on ghost imaging via sparsity constraints. Sci. Rep. 2016, 6, 25718. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Lu, R.; Han, S.; Xie, H.; Du, G.; Xiao, T.; Zhu, D. Fourier-transform ghost imaging with hard X rays. Phys. Rev. Lett. 2016, 117, 113901. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Li, X.; Cheng, Y.; Qin, Y.; Wang, H. Radar coincidence imaging in the presence of target-motion-induced error. J. Electron. Imaging 2014, 23, 23014. [Google Scholar] [CrossRef]
- Li, D.; Li, X.; Qin, Y.; Cheng, Y.; Wang, H. Radar coincidence imaging: An instantaneous imaging technique with stochastic signals. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2261–2277. [Google Scholar]
- Li, D.; Li, X.; Cheng, Y.; Qin, Y.; Wang, H. Radar coincidence imaging under grid mismatch. ISRN Signal Process. 2014, 2014, 987803. [Google Scholar] [CrossRef]
- Ni, X.; Kildishev, A.V.; Shalaev, V.M. Metasurface holograms for visible light. Nat. Commun. 2013, 4, 2807. [Google Scholar] [CrossRef]
- Huang, L. Three-dimensional optical holography using a plasmonic metasurface. Nat. Commun. 2013, 4, 2808. [Google Scholar] [CrossRef]
- Li, Y.B.; Wan, X.; Cai, B.G.; Cheng, Q.; Cui, T. Frequency-controls of electromagnetic multi-beam scanning by metasurfaces. Sci. Rep. 2014, 4, 6921. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S. Controlling the polarization state of light with a dispersion-free metastructure. In Proceedings of the APS March Meeting, San Antonio, TX, USA, 2–6 March 2015. [Google Scholar]
- Cui, T.J.; Qi, M.Q.; Wan, X.; Zhao, J.; Cheng, Q. Coding metamaterials, digital metamaterials and programmable metamaterials. Light Sci. Appl. 2014, 3, e218. [Google Scholar] [CrossRef]
- Liao, Z.; Liu, S.; Ma, H.F.; Li, C.; Jin, B.; Cui, T.J. Electromagnetically induced transparency metamaterial based on spoof localized surface plasmons at terahertz frequencies. Sci. Rep. 2016, 6, 27596. [Google Scholar] [CrossRef] [PubMed]
- Rahani, E.K.; Kundu, T.; Wu, Z.; Xin, H. Mechanical damage detection in polymer tiles by THz radiation. IEEE Sens. J. 2011, 11, 1720–1725. [Google Scholar] [CrossRef]
- Fitzgerald, A.J.; Berry, E.; Zinovev, N.N.; Walker, G.C.; Smith, M.A.; Chamberlain, J.M. An introduction to medical imaging with coherent terahertz frequency radiation. Phys. Med. Biol. 2002, 47, 67–84. [Google Scholar] [CrossRef]
- Siegel, P.H. Terahertz technology in biology and medicine. IEEE Trans. Microwave Theory Tech. 2004, 52, 2438–2447. [Google Scholar] [CrossRef]
- Yu, L.; Sun, H.; Barbot, J.P.; Zheng, G. Bayesian compressive sensing for cluster structured sparse signals. Signal Process. 2012, 92, 259–269. [Google Scholar] [CrossRef]
- Chen, S.; Luo, C.; Deng, B.; Qin, Y.; Wang, H. Study on coding strategies for radar coded-aperture imaging in terahertz band. J. Electron. Imaging 2017, 26, 053022. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Center frequency (fc) | 340 GHz |
| Bandwidth (B) | 20 GHz |
| Sampling frequency (fs) | 10 MHz |
| Distance between coded aperture and transceiver (a) | 0.25 m |
| Distance between coded aperture and left face of the imaging area (b) | 0.6 m |
| Coding and sampling times | 30 |
| Number of the receiving detectors | 10 × 10 |
| Size of the SIMO array antenna | 0.5 m × 0.5 m |
| Size of the 3D imaging cell (sw × sh × d) | 0.1 m × 0.1 m × 0.3 m |
| Size of the first-level grid cell | 0.01 m × 0.01 m × 0.01 m |
| Size of the second-level grid cell | 0.005 m × 0.005 m × 0.005 m |
| Size of the last-level grid cell | 0.0025 m × 0.0025 m × 0.0025 m |
| Size of the transmission-type coded aperture (h × v) | 0.5 m × 0.5 m |
| Range of random phase (, ) | (, ) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Luo, C.; Deng, B.; Wang, H.; Cheng, Y.; Zhuang, Z. Three-Dimensional Terahertz Coded-Aperture Imaging Based on Single Input Multiple Output Technology. Sensors 2018, 18, 303. https://doi.org/10.3390/s18010303
Chen S, Luo C, Deng B, Wang H, Cheng Y, Zhuang Z. Three-Dimensional Terahertz Coded-Aperture Imaging Based on Single Input Multiple Output Technology. Sensors. 2018; 18(1):303. https://doi.org/10.3390/s18010303
Chicago/Turabian StyleChen, Shuo, Chenggao Luo, Bin Deng, Hongqiang Wang, Yongqiang Cheng, and Zhaowen Zhuang. 2018. "Three-Dimensional Terahertz Coded-Aperture Imaging Based on Single Input Multiple Output Technology" Sensors 18, no. 1: 303. https://doi.org/10.3390/s18010303
APA StyleChen, S., Luo, C., Deng, B., Wang, H., Cheng, Y., & Zhuang, Z. (2018). Three-Dimensional Terahertz Coded-Aperture Imaging Based on Single Input Multiple Output Technology. Sensors, 18(1), 303. https://doi.org/10.3390/s18010303