Angular Molecular–Electronic Sensor with Negative Magnetohydrodynamic Feedback

Abstract
:1. Introduction
2. Method of Forming Feedback
3. Experimental Output Characteristics
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
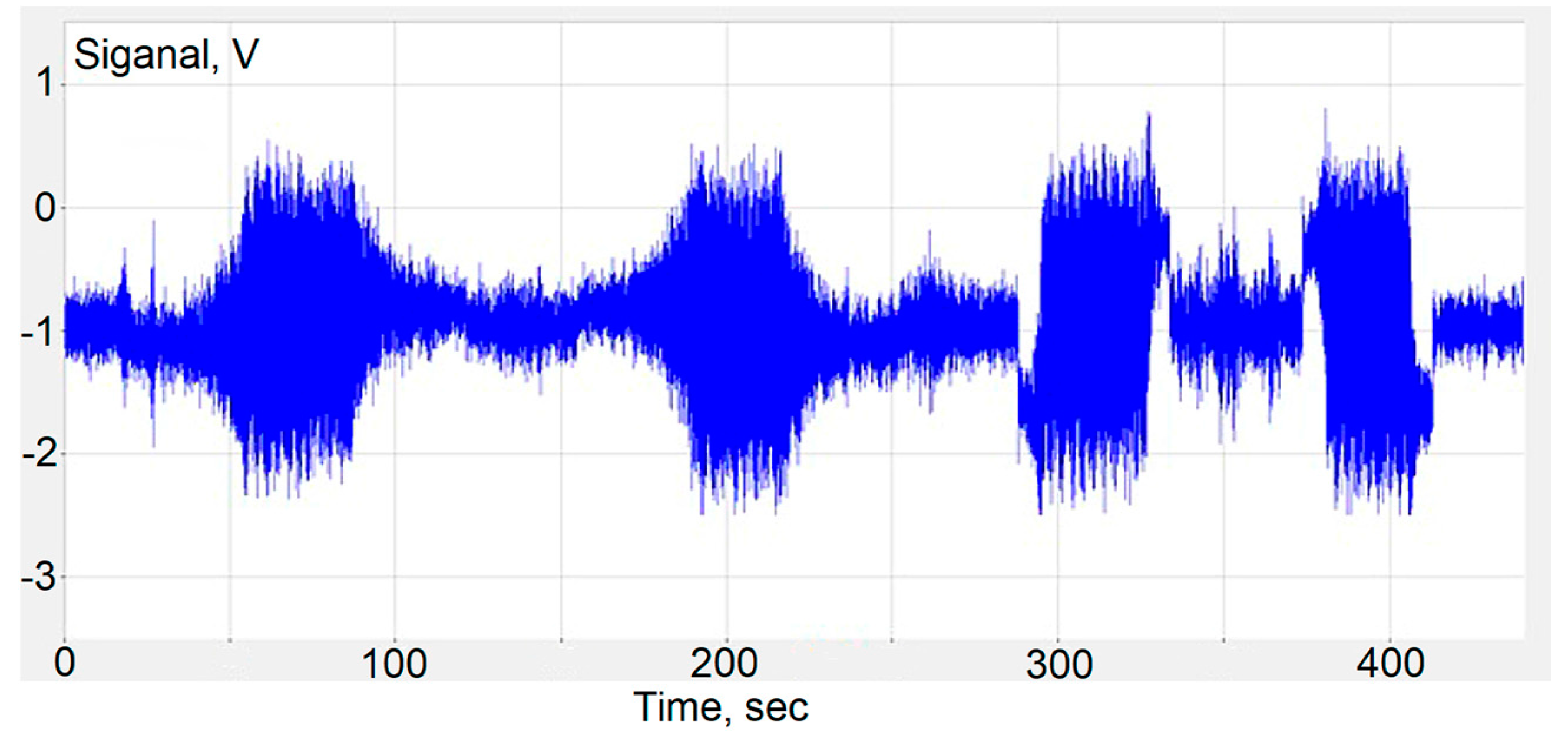
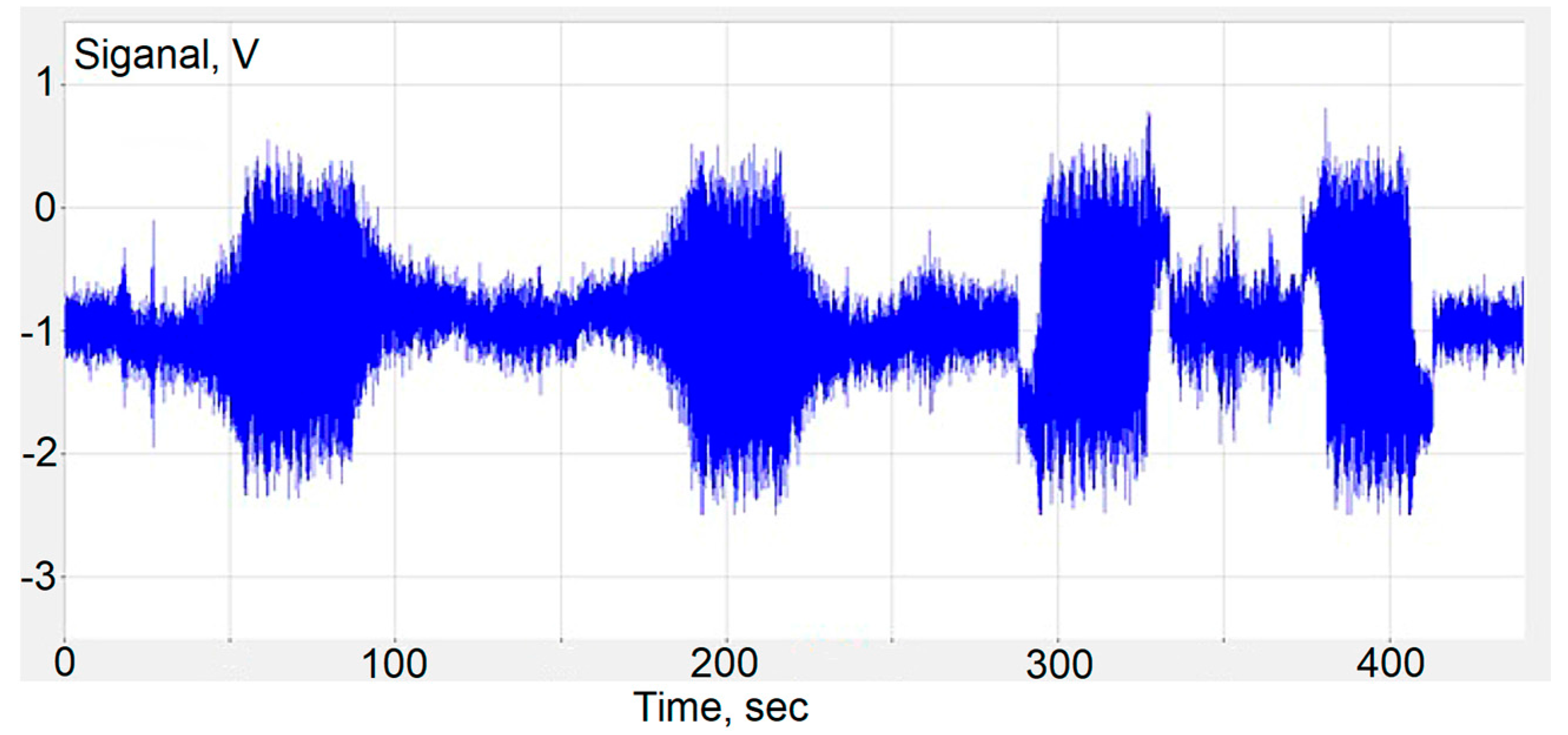
- An increase in speed from 0 to 5 deg/s in a clockwise direction with an acceleration of 0.1 deg/s2, rotation at a rate of 5 deg/s, subsequent deceleration with a negative acceleration of −0.1 deg/s2.
- An increase in speed from 0 to 5 deg/s counterclockwise with an acceleration of 0.1 deg/s2, rotation at a rate of 5 deg/s, subsequent deceleration with a negative acceleration of −0.1 deg/s2.
- An increase in speed from 0 to 5 deg/s in a clockwise direction with an acceleration of 0.5 deg/s2, rotation at a rate of 5 deg/s, followed by a deceleration with a negative acceleration of −0.5 deg/s2.
- An increase in speed from 0 to 5 deg/s counterclockwise with an acceleration of 0.5 deg/s2, rotation at a rate of 5 deg/s, subsequent deceleration with a negative acceleration of −0.5 deg/s2.

References
- Lidorenko, N.S.; Ilin, B.I.; Zaidenman, I.A.; Sobol, V.V.; Shchigorev, G. An Introduction to Molecular Electronics; Energoatomizdat: Moscow, Russia, 1984; p. 320. [Google Scholar]
- Huang, H.; Agafonov, V.; Yu, H. Molecular electric transducers as motion sensors: A review. Sensors 2013, 13, 4581–4597. [Google Scholar] [CrossRef] [PubMed]
- Shabalina, A.S.; Zaitsev, D.L.; Egorov, E.V.; Egorov, I.V.; Antonov, A.N.; Bugaev, A.S.; Agafonov, V.M.; Krishtop, V.G. Modern measuring instruments based on molecular electronic transducers. Achiev. Mod. Radioelectron 2014, 9, 4–33. [Google Scholar]
- Kapustian, N.K.; Antonovskaya, G.; Agafonov, V.; Neumoin, K.; Safonov, M. Seismic monitoring of linear and rotational oscillations of the multistory buildings in Moscow. In Proceedings of the 6th European Workshop Seismic Behaviour Irregular Complex Structures (EWICS), Haifa, Israel, 12–13 September 2011; pp. 353–363. [Google Scholar]
- Yashkin, A.V.; Agafonov, V.M.; Afanasyev, K.A. Direction definition on moving object using seismic module containing molecular electronic motion sensors. Proc. MIPT 2013, 5, 142–149. [Google Scholar]
- Muyzert, E.; Kashubin, A.; Kragh, E.; Edme, P. Land seismic data acquisition using rotation sensors. In Proceedings of the 74th EAGE Conference & Exhibition Incorporating SPE EUROPEC, Copenhagen, Denmark, 4–7 June 2012. [Google Scholar]
- Antonovskaya, G.N.; Kapustian, N.K.; Moshkunov, A.I.; Danilov, A.V.; Moshkunov, K.A. New seismic array solution for earthquake observations and hydropower plant health monitoring. J. Seismol. 2017, 1–15. [Google Scholar] [CrossRef]
- Zaitsev, D.L.; Agafonov, V.M.; Egorov, E.V.; Antonov, A.N.; Shabalina, A.C. Molecular electronic angular motion transducer broad band self-noise. Sensors 2015, 15, 29378–29392. [Google Scholar] [CrossRef] [PubMed]
- Egorov, E.V.; Agafonov, V.M.; Zaitsev, D.L. Molecular electronic linear accelerometers. Preliminary test results. Gyroscopy Navig. 2010, 1, 246–251. [Google Scholar]
- Krishtop, V.G. Experimental modeling of the temperature dependence of the transfer function of rotational motion sensors based on electrochemical transducers. Russ. J. Electrochem. 2014, 50, 350–354. [Google Scholar] [CrossRef]
- Egorov, I.V.; Shabalina, A.S.; Agafonov, V.M. Design and Self-Noise of MET Closed-Loop Seismic Accelerometers. IEEE Sens. J. 2017, 17. [Google Scholar] [CrossRef]
- Agafonov, V.M.; Egorov, I.V.; Shabalina, A.S. Operating principles and technical characteristics of a small-sized molecular-electronic seismic sensor with negative feedback. Seism. Instrum. 2014, 50, 1–8. [Google Scholar] [CrossRef]
- Leugoud, R.; Kharlamov, A. Second generation of a rotational electrochemical seismometer using magnetohydrodynamic technology. J Seismol. 2012, 16, 587–593. [Google Scholar] [CrossRef]
- Agafonov, V.M.; Egorov, E.V. Influence of the Electrical Field on the Vibrating Signal Conversion in Electrochemical (MET) Motion Sensor. Int. J. Electrochem. Sci. 2016, 11, 2205–2218. [Google Scholar]
- Egorov, E.V.; Egorov, I.V.; Agafonov, V.M. Self-Noise of the MET Angular Motion Seismic Sensors. Hindawi Publishing Corporation. J. Sens. 2015, 2015, 512645. [Google Scholar] [CrossRef]
- Stockwell, W. Bias Stability Measurement: Allan Variance. Crossbow Technology, Inc. Available online: http://www.xbow.com/Support/Support_pdf_files/Bias_Stability_Measurement.pdf (accessed on 26 February 2004).
- ASB Series Angular Accelerometer. Available online: http://www.jewellinstruments.com/wp-content/uploads/2012/07/Jewell_SC_Data-Sheet_ASB-Series-Angular-Accelerometer_Dec-2013.pdf (accessed on 15 January 2018).
- Angular Accelerometer. Available online: https://www.crlsensors.com/prodDocs/sr-100fr.pdf (accessed on 15 January 2018).
- Kozlov, V.A.; Terent’ev, D.A. Transfer Function of a Diffusion Transducer at Frequencies Exceeding the Thermodynamic Frequency. Russ. J. Electrochem. 2003, 39, 401–406. [Google Scholar] [CrossRef]
- ST 1100 SERIE. Available online: http://www.actidyn.com/wp-content/uploads/2011/02/ST1100.pdf (accessed on 15 January 2018).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | MET Angular Accelerometer | ASB, Jewell Instruments | SR-100FR, Columbia Research Laboratories |
|---|---|---|---|
| Scale Factor (V/rad/s2) | 8 | 0.025 | 1–50 |
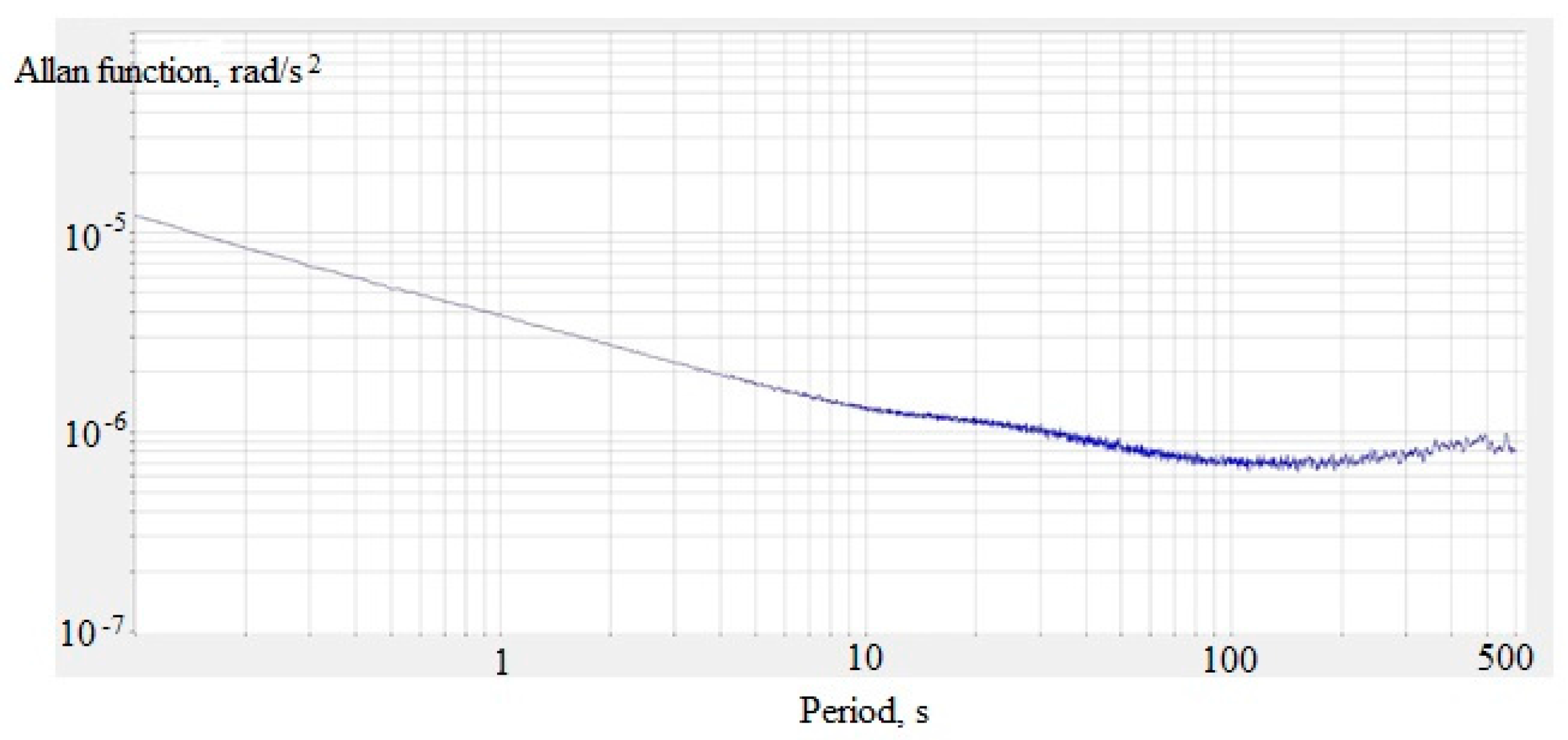
| Self-noise (rad/s2) | 3.6 × 10−5 | 5 × 10−3 | 2 × 10−3 |
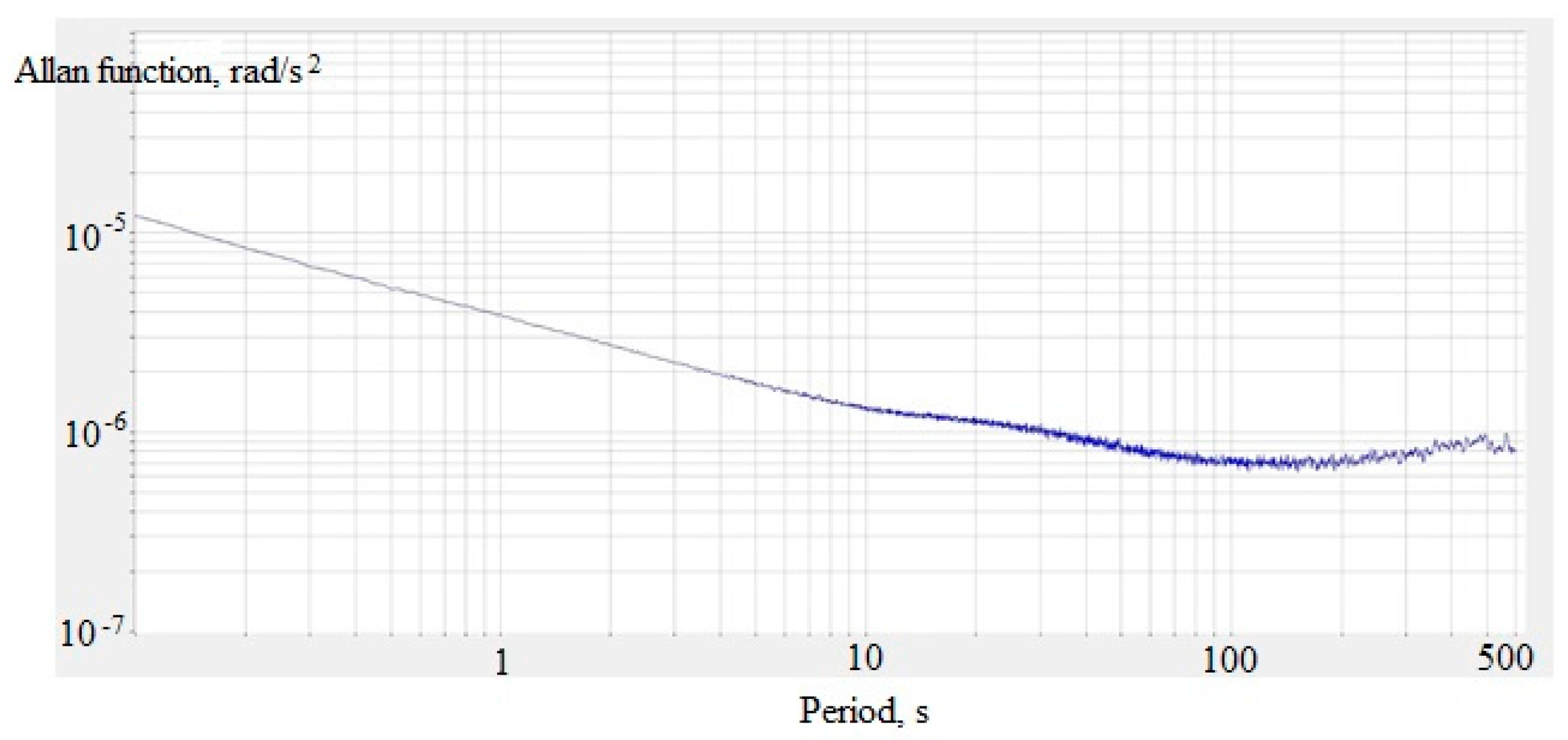
| Bias (rad/sec2) | 7 × 10−7 | - | - |
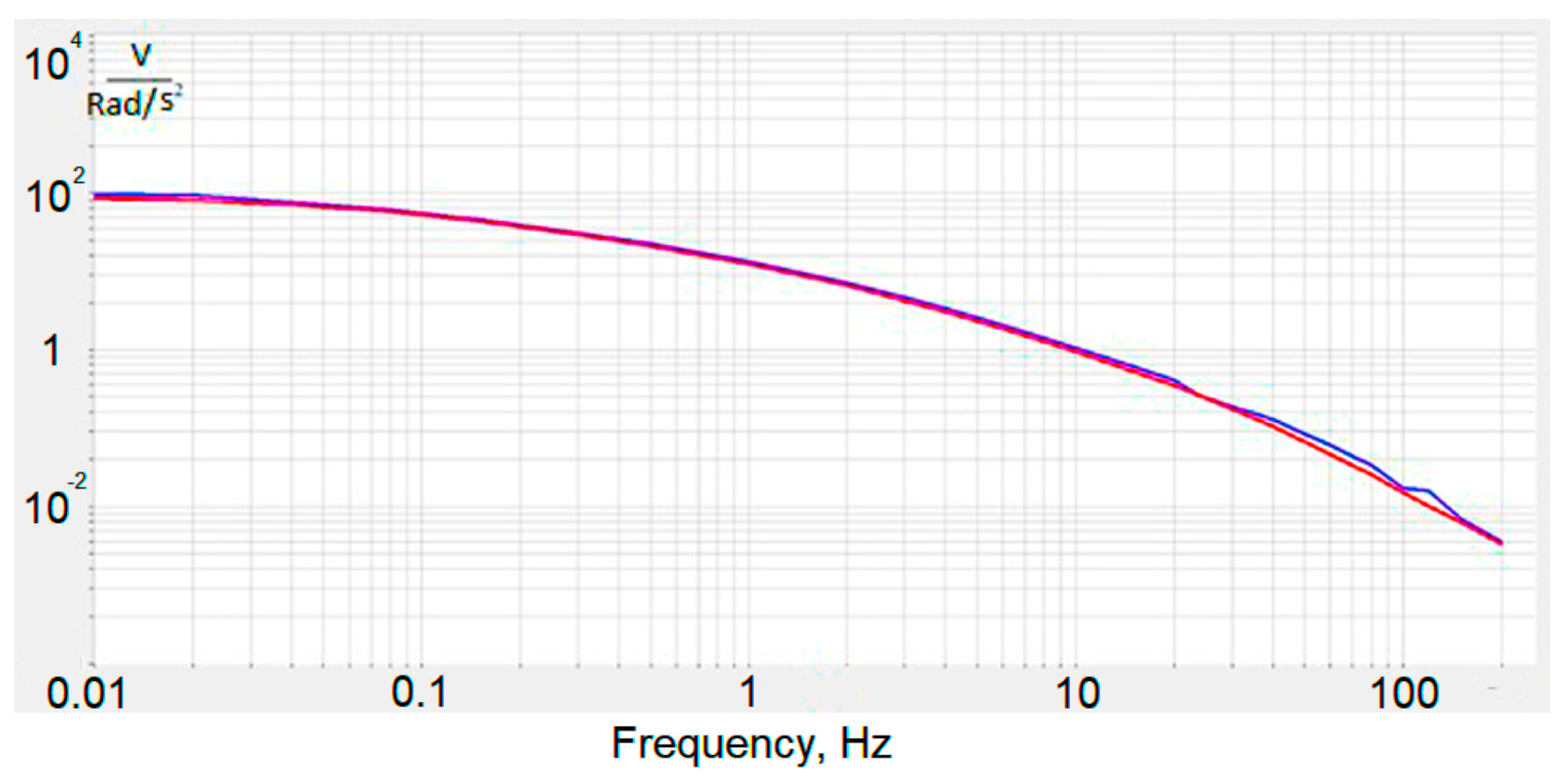
| Bandwidth (−3db), Hz | 10 (100 as optional) | 70 | 10 |
| Input Range, (rad/sec2) | ±1 | ±200 | ±5 |
| Input Current, (mA, Max.) | 12 | 10 | 20 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Egorov, E.; Agafonov, V.; Avdyukhina, S.; Borisov, S. Angular Molecular–Electronic Sensor with Negative Magnetohydrodynamic Feedback. Sensors 2018, 18, 245. https://doi.org/10.3390/s18010245
Egorov E, Agafonov V, Avdyukhina S, Borisov S. Angular Molecular–Electronic Sensor with Negative Magnetohydrodynamic Feedback. Sensors. 2018; 18(1):245. https://doi.org/10.3390/s18010245
Chicago/Turabian StyleEgorov, Egor, Vadim Agafonov, Svetlana Avdyukhina, and Sergey Borisov. 2018. "Angular Molecular–Electronic Sensor with Negative Magnetohydrodynamic Feedback" Sensors 18, no. 1: 245. https://doi.org/10.3390/s18010245
APA StyleEgorov, E., Agafonov, V., Avdyukhina, S., & Borisov, S. (2018). Angular Molecular–Electronic Sensor with Negative Magnetohydrodynamic Feedback. Sensors, 18(1), 245. https://doi.org/10.3390/s18010245