A Fatigue Crack Size Evaluation Method Based on Lamb Wave Simulation and Limited Experimental Data

Abstract
1. Introduction
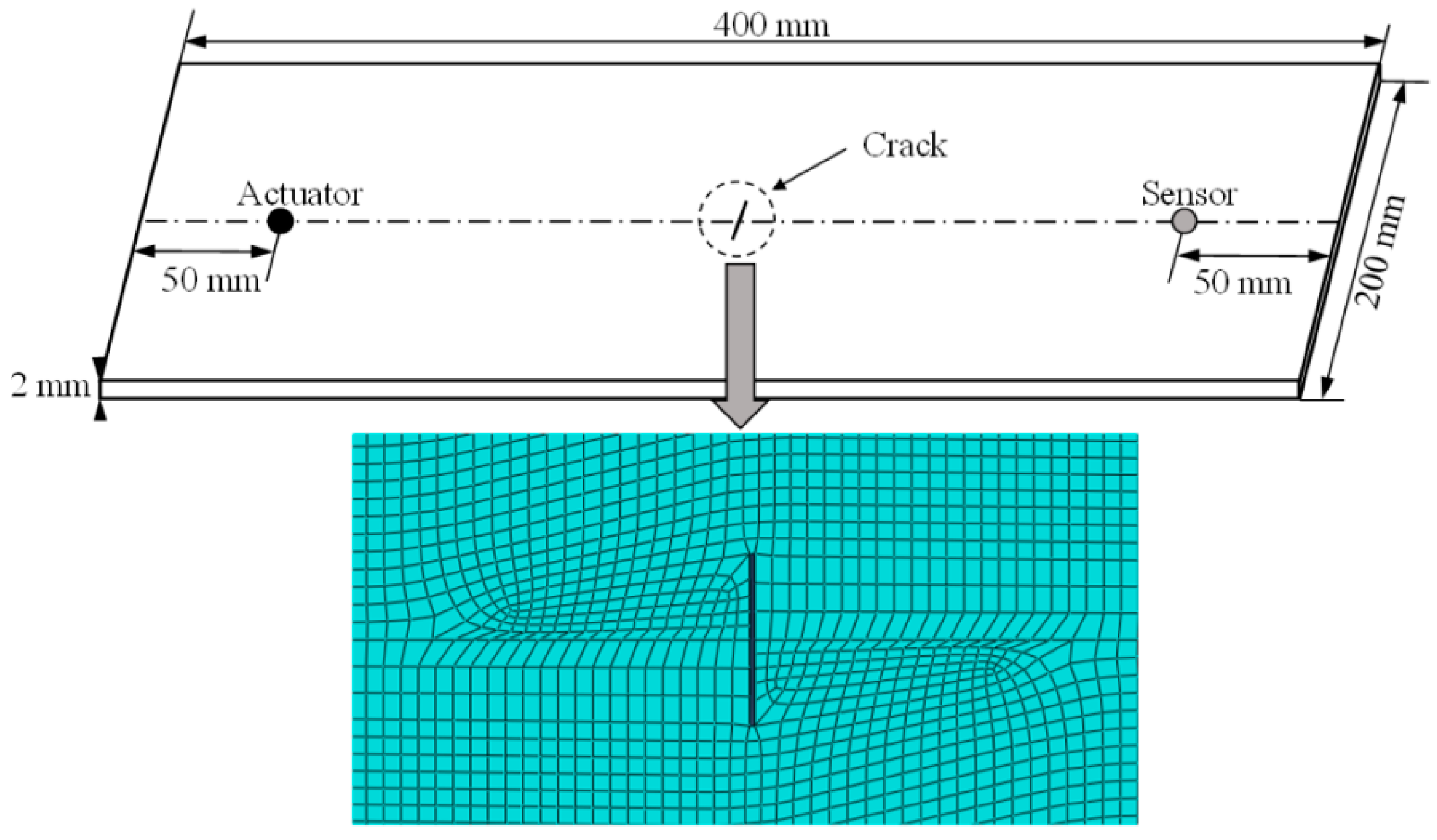
2. Finite Element Modeling of Lamb Wave Propagation
3. Baseline Model of Lamb Wave Damage Detection Using FE Model
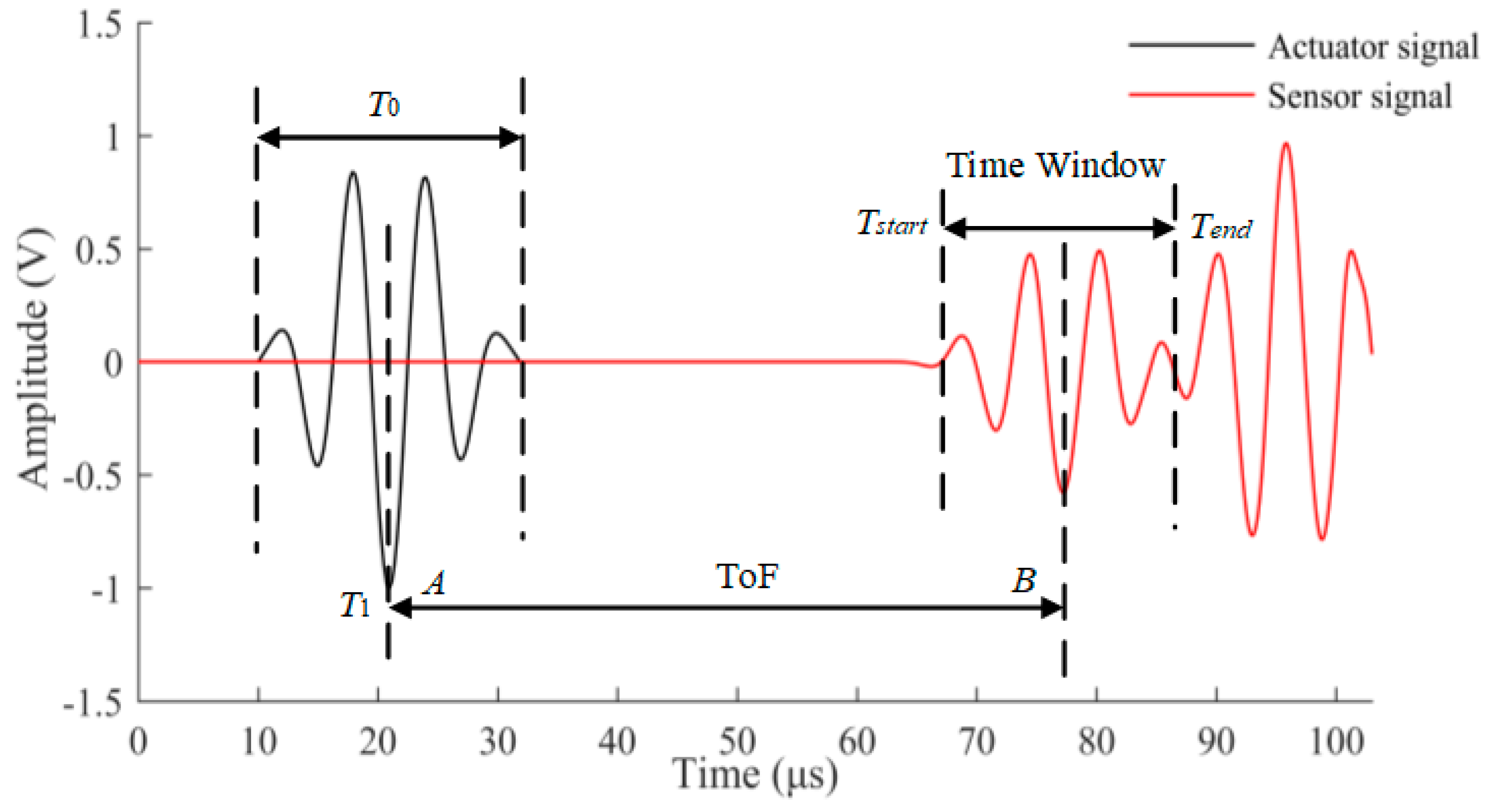
3.1. Signal Processing
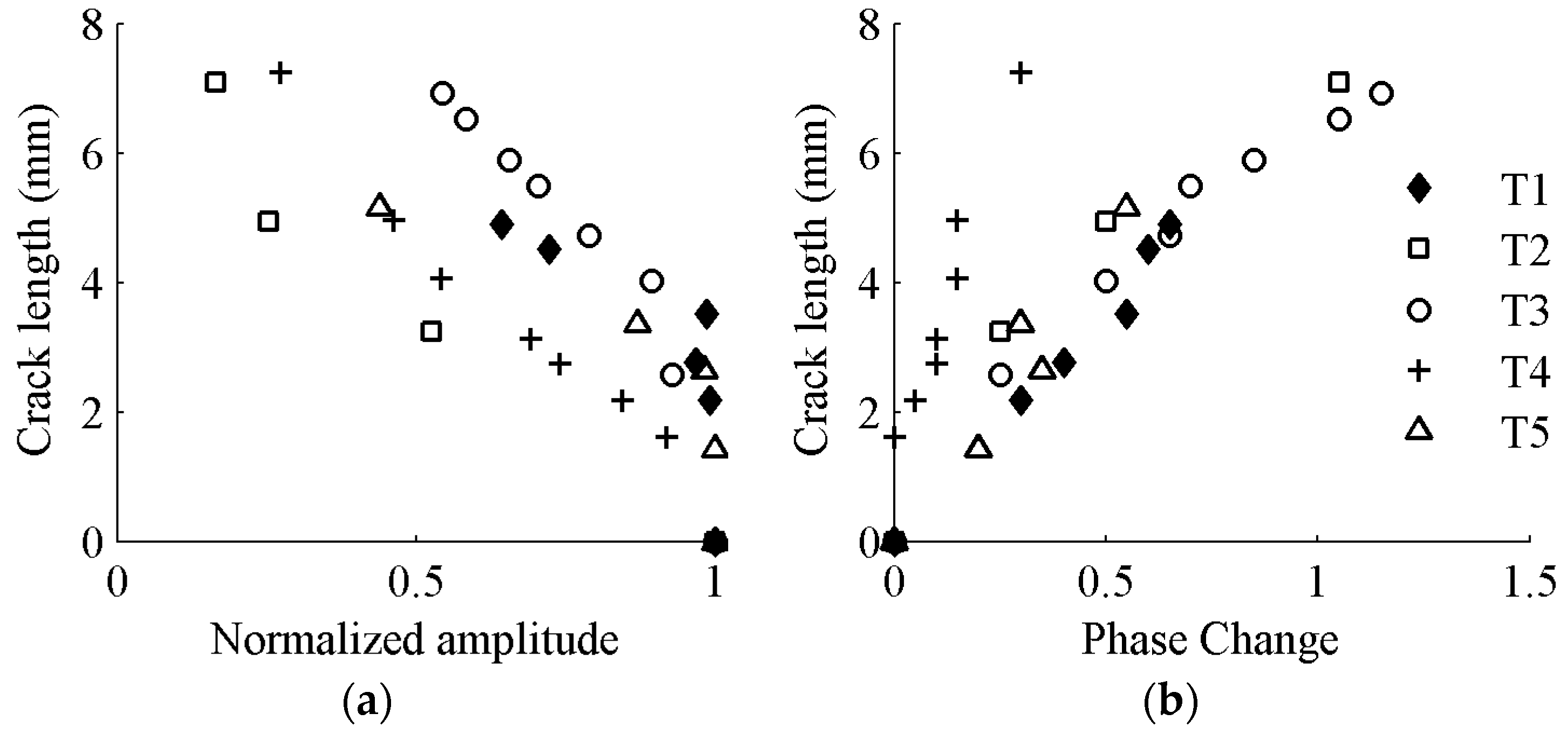
3.2. Baseline Crack Size Quantification Model
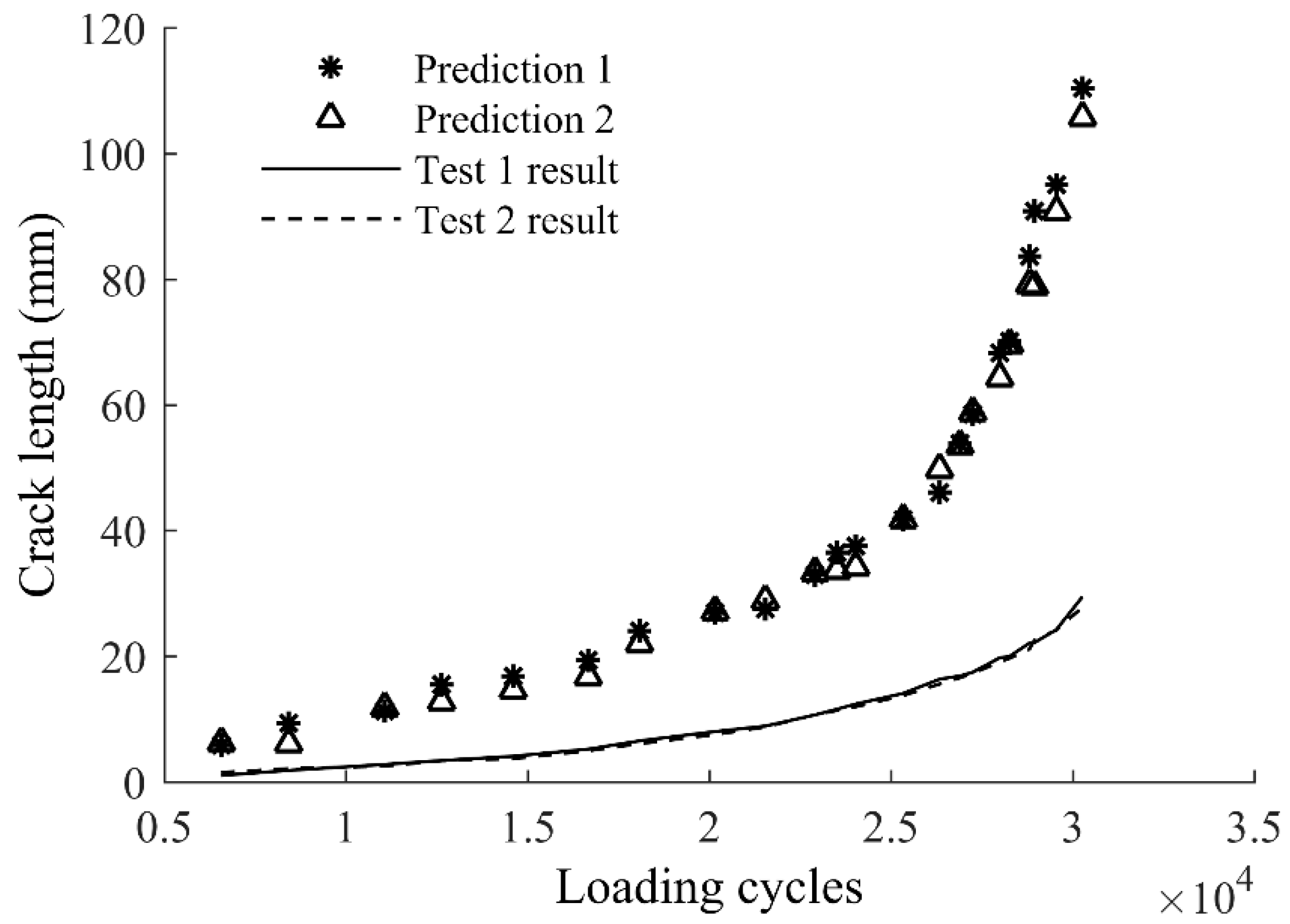
3.3. Bayesian Updating of Baseline Model
4. Experimental Validation
4.1. Coupon Application
4.2. Structural Component Application
4.2.1. Different Loading Spectrum
4.2.2. Specimen from a Different Manufacturer
5. Conclusions
- (1)
- The baseline model using FE simulation data can reliably identify the relationship between the damage sensitive features and the crack length. It provides an economic and efficient way to generate data for the development of damage quantification models.
- (2)
- Direct use of baseline model for realistic application may lead to unreliable results, and the baseline model must be further calibrated to a target-specific model. Bayesian updating provides a rational way to update the initial baseline model with Lamb wave data acquired from the specific target structure. As more data points are used for updating, the model can be calibrated to the target structure and yield accurate prediction results.
- (3)
- The overall method is validated using testing data from coupon specimens and lap-joint components. Due to Bayesian updating, uncertainties from numerical simulation, loading condition, manufacturing, and materials can be included. Validation results indicates the proposed method provide a systematic solution to crack size quantification in plate-like structures.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- He, J.; Yang, J.; Wang, Y.; Waisman, H.; Zhang, W. Probabilistic model updating for sizing of hole-edge crack using fiber bragg grating sensors and the high-order extended finite element method. Sensors 2016, 16, 1956. [Google Scholar] [CrossRef] [PubMed]
- Guan, X.; He, J.; Rasselkorde, E.M.; Zhang, J.; Abbasi, W.A.; Zhou, S.K. Probabilistic fatigue life prediction and structural reliability evaluation of turbine rotors integrating an automated ultrasonic inspection system. J. Nondestr. Eval. 2014, 33, 51–61. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Chang, F.-K.; Bao, Q.; Mei, H. On-line updating Gaussian mixture model for aircraft wing spar damage evaluation under time-varying boundary condition. Smart Mater. Struct. 2014, 23, 125001. [Google Scholar] [CrossRef]
- Guan, X.; Zhang, J.; Rasselkorde, E.M.; Abbasi, W.A.; Zhou, S.K. Material damage diagnosis and characterization for turbine rotors using three-dimensional adaptive ultrasonic NDE data reconstruction techniques. Ultrasonics 2014, 54, 516–525. [Google Scholar] [CrossRef] [PubMed]
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors; Academic Press: Burlington, VT, USA, 2008; pp. 185–199. [Google Scholar]
- Janapati, V.; Kopsaftopoulos, F.; Li, F.; Lee, S.J.; Chang, F.-K. Damage detection sensitivity characterization of acousto-ultrasound-based structural health monitoring techniques. Struct. Health Monit. 2016, 15, 143–161. [Google Scholar] [CrossRef]
- Ladpli, P.; Nardari, R.; Kopsaftopoulos, F.; Wang, Y.; Chang, F.K. Design of Multifunctional Structural Batteries with Health Monitoring Capabilities. In Proceedings of the European Workshop on Structural Health Monitoring, Bilbao, Spain, 5–8 July 2016. [Google Scholar]
- Qiu, L.; Liu, M.; Qing, X.; Yuan, S. A quantitative multidamage monitoring method for large-scale complex composite. Struct. Health Monit. 2013, 12, 183–196. [Google Scholar] [CrossRef]
- Zhang, S.; Li, X.; Jeong, H.; Cho, S.; Hu, H. Theoretical and experimental investigation of the pulse-echo nonlinearity acoustic sound fields of focused transducers. Appl. Acoust. 2017, 117, 145–149. [Google Scholar] [CrossRef]
- Yang, J.; He, J.; Guan, X.; Wang, D.; Chen, H.; Zhang, W.; Liu, Y. A probabilistic crack size quantification method using in-situ Lamb wave test and Bayesian updating. Mech. Syst. Signal Process. 2016, 78, 118–133. [Google Scholar] [CrossRef]
- Kim, Y.H.; Kim, D.H.; Han, J.H.; Kim, C.G. Damage assessment in layered composites using spectral analysis and Lamb wave. Compos. Part B Eng. 2007, 38, 800–809. [Google Scholar] [CrossRef]
- Baid, H.; Schaal, C.; Samajder, H.; Mal, A. Dispersion of Lamb waves in a honeycomb composite sandwich panel. Ultrasonics 2014, 56, 409–416. [Google Scholar] [CrossRef] [PubMed]
- Souza, P. A Lamb Wave Based Method for the Assessment of Faults in Aluminium Plates. In Proceedings of the International Federation of Automatic Control Symposium on Fault Detection, Supervision and Safety of Technical Processes, Mexico City, Mexico, 29–31 August 2012; pp. 78–83. [Google Scholar]
- Michaels, J.E.; Michaels, T.E. Detection of structural damage from the local temporal coherence of diffuse ultrasonic signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 1769–1782. [Google Scholar] [CrossRef] [PubMed]
- Zima, B.; Rucka, M. Guided waves for monitoring of plate structures with linear cracks of variable length. Arch. Civil Mech. Eng. 2016, 16, 387–396. [Google Scholar] [CrossRef]
- Boller, C.; Buderath, M. Fatigue in aerostructures—Where structural health monitoring can contribute to a complex subject. Philos. Trans. 2007, 365, 561–587. [Google Scholar] [CrossRef] [PubMed]
- Huang, M.; He, J.; Guan, X. Probabilistic inference of fatigue damage propagation with limited and partial information. Chin. J. Aeronaut. 2015, 85, 1055–1065. [Google Scholar] [CrossRef]
- Zhuang, Y.; Kopsaftopoulos, F.; Chang, F.K. Bondline Integrity Monitoring of Adhesively Bonded Structures via an Electromechanical Impedance Based Approach. In Proceedings of the International Workshop on Structural Health Monitoring, Stanford, CA, USA, 1–3 September 2015. [Google Scholar]
- Zhuang, Y.; Li, Y.-H.; Kopsaftopoulos, F.; Chang, F.-K. A self-diagnostic adhesive for monitoring bonded joints in aerospace structures. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, Las Vegas, NV, USA, 21–24 March 2016. [Google Scholar]
- Hong, M.; Su, Z.; Lu, Y.; Sohn, H.; Qing, X. Locating fatigue damage using temporal signal features of nonlinear Lamb waves. Mech. Syst. Signal Proc. 2015, 60–61, 182–197. [Google Scholar] [CrossRef]
- Vanli, O.A.; Jung, S. Statistical updating of finite element model with Lamb wave sensing data for damage detection problems. Mech. Syst. Signal Proc. 2014, 42, 137–151. [Google Scholar] [CrossRef]
- Fenza, A.D.; Sorrentino, A.; Vitiello, P. Application of Artificial Neural Networks and Probability Ellipse methods for damage detection using Lamb waves. Compos. Struct. 2015, 133, 390–403. [Google Scholar] [CrossRef]
- Shen, Y.; Giurgiutiu, V. Simulation of Interaction Between Lamb Waves and Cracks for Structural Health Monitoring With Piezoelectric Wafer Active Sensors. In Proceedings of the ASME 2012 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Stone Mountain, GA, USA, 19–21 September 2012; pp. 615–623. [Google Scholar]
- Agrahari, J.K.; Kapuria, S. Effects of adhesive, host plate, transducer and excitation parameters on time reversibility of ultrasonic Lamb waves. Ultrasonic 2016, 70, 147. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, Z.A. Numerical Simulations of Lamb Waves in Plates Using a Semi-Analytical Finite Element Method. Ph.D. Thesis, Otto-von-Guericke-University Magdeburg, Düsseldorf, Germany, 2011. [Google Scholar]
- Mace, B.R.; Manconi, E. Modelling wave propagation in two-dimensional structures using finite element analysis. J. Sound Vib. 2008, 318, 884–902. [Google Scholar] [CrossRef]
- Zhou, W.J.; Ichchou, M.N. Wave propagation in mechanical waveguide with curved members using wave finite element solution. Comput. Methods Appl. Mech. Eng. 2010, 199, 2099–2109. [Google Scholar] [CrossRef]
- Willberg, C.; Duczek, S.; Perez, J.M.V.; Schmicker, D.; Gabbert, U. Comparison of different higher order finite element schemes for the simulation of Lamb waves. Comput. Methods Appl. Mech. Eng. 2012, 241–244, 246–261. [Google Scholar] [CrossRef]
- Lu, Y.; Ye, L.; Su, Z.; Yang, C. Quantitative assessment of through-thickness crack size based on Lamb wave scattering in aluminium plates. NDT E Int. 2008, 41, 59–68. [Google Scholar] [CrossRef]
- Ng, C.T.; Veidt, M. Scattering of the fundamental anti-symmetric Lamb wave at delaminations in composite laminates. J. Acoust. Soc. Am. 2011, 129, 1288. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Guan, R.; Lu, Y. Nonlinear Lamb waves for fatigue damage identification in FRP-reinforced steel plates. Ultrasonics 2017, 80, 87–95. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Qiao, P.; Shi, B. Application of soft-thresholding on the decomposed Lamb wave signals for damage detection of plate-like structures. Measurement 2016, 88, 417–427. [Google Scholar] [CrossRef]
- Lowe, M.; Diligent, O. Low-frequency reflection characteristics of the s 0 Lamb wave from a rectangular notch in a plate. J. Acoust. Soc. Am. 2002, 111, 64–74. [Google Scholar] [CrossRef] [PubMed]
- Han, S.J. Finite Element Analysis of Lamb Waves Acting within a Thin Aluminum Plate. Master’s Thesis, Air Force Institute of Technology, Wright-Patterson AFB, OH, USA, 2007. [Google Scholar]
- Moser, F.; Jacobs, L.J.; Qu, J. Modeling elastic wave propagation in waveguides with the finite element method. NDT E Int. 1999, 32, 225–234. [Google Scholar] [CrossRef]
- He, J.; Guan, X.; Peng, T.; Liu, Y.; Abhinav, S.; Jose, C.; Kai, G. A multi-feature integration method for fatigue crack detection and crack length estimation in riveted lap joints using Lamb waves. Smart Mater. Struct. 2013, 22, 105007. [Google Scholar] [CrossRef]
- Fort, G.; Priouret, P. Convergence of adaptive and interacting Markov chain Monte Carlo algorithms. Ann. Stat. 2011, 39, 3262–3289. [Google Scholar] [CrossRef]
- Cowles, M.K.; Carlin, B.P. Markov Chain Monte Carlo Convergence Diagnostics: A Comparative Review. J. Am. Stat. Assoc. 1996, 91, 883–904. [Google Scholar] [CrossRef]
- Wan, H.P.; Ren, W.X. Stochastic model updating utilizing Bayesian approach and Gaussian process model. Mech. Syst. Signal Proc. 2016, 70–71, 245–268. [Google Scholar] [CrossRef]
- Peng, T.; Saxena, A.; Kai, G.; Xiang, Y.; Liu, Y. A novel Bayesian Imaging Method for probabilistic delamination detection of composite materials. Smart Mater. Struct. 2013, 22, 410–420. [Google Scholar] [CrossRef]
- Guan, X.; Jha, R.; Liu, Y. Model selection, updating, and averaging for probabilistic fatigue damage prognosis. Struct. Saf. 2011, 33, 242–249. [Google Scholar] [CrossRef]
- Guan, X.; He, J.; Jha, R.; Liu, Y. An efficient analytical Bayesian method for reliability and system response updating based on Laplace and inverse first-order reliability computations. Reliab. Eng. Syst. Saf. 2012, 97, 1–13. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | E (GPa) | G (GPa) | v | ρ (kg/m3) |
|---|---|---|---|---|
| Al2024-T3 | 72 | 27 | 0.33 | 2780 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, J.; Ran, Y.; Liu, B.; Yang, J.; Guan, X. A Fatigue Crack Size Evaluation Method Based on Lamb Wave Simulation and Limited Experimental Data. Sensors 2017, 17, 2097. https://doi.org/10.3390/s17092097
He J, Ran Y, Liu B, Yang J, Guan X. A Fatigue Crack Size Evaluation Method Based on Lamb Wave Simulation and Limited Experimental Data. Sensors. 2017; 17(9):2097. https://doi.org/10.3390/s17092097
Chicago/Turabian StyleHe, Jingjing, Yunmeng Ran, Bin Liu, Jinsong Yang, and Xuefei Guan. 2017. "A Fatigue Crack Size Evaluation Method Based on Lamb Wave Simulation and Limited Experimental Data" Sensors 17, no. 9: 2097. https://doi.org/10.3390/s17092097
APA StyleHe, J., Ran, Y., Liu, B., Yang, J., & Guan, X. (2017). A Fatigue Crack Size Evaluation Method Based on Lamb Wave Simulation and Limited Experimental Data. Sensors, 17(9), 2097. https://doi.org/10.3390/s17092097