Anti-Sweep Jamming Design and Implementation Using Multi-Channel Harmonic Timing Sequence Detection for Short-Range FMCW Proximity Sensors


Abstract
:1. Introduction
2. Failure Mechanism Analysis of Short-Range FMCW Proximity Sensor under Sweep Jamming
2.1. FMCW Harmonic Ranging Principle
2.2. Sweep Jamming Strategy
2.3. Failure Mechanism Analysis
3. Design and Implementation of Multi-Channel Harmonic Timing Sequence Detection
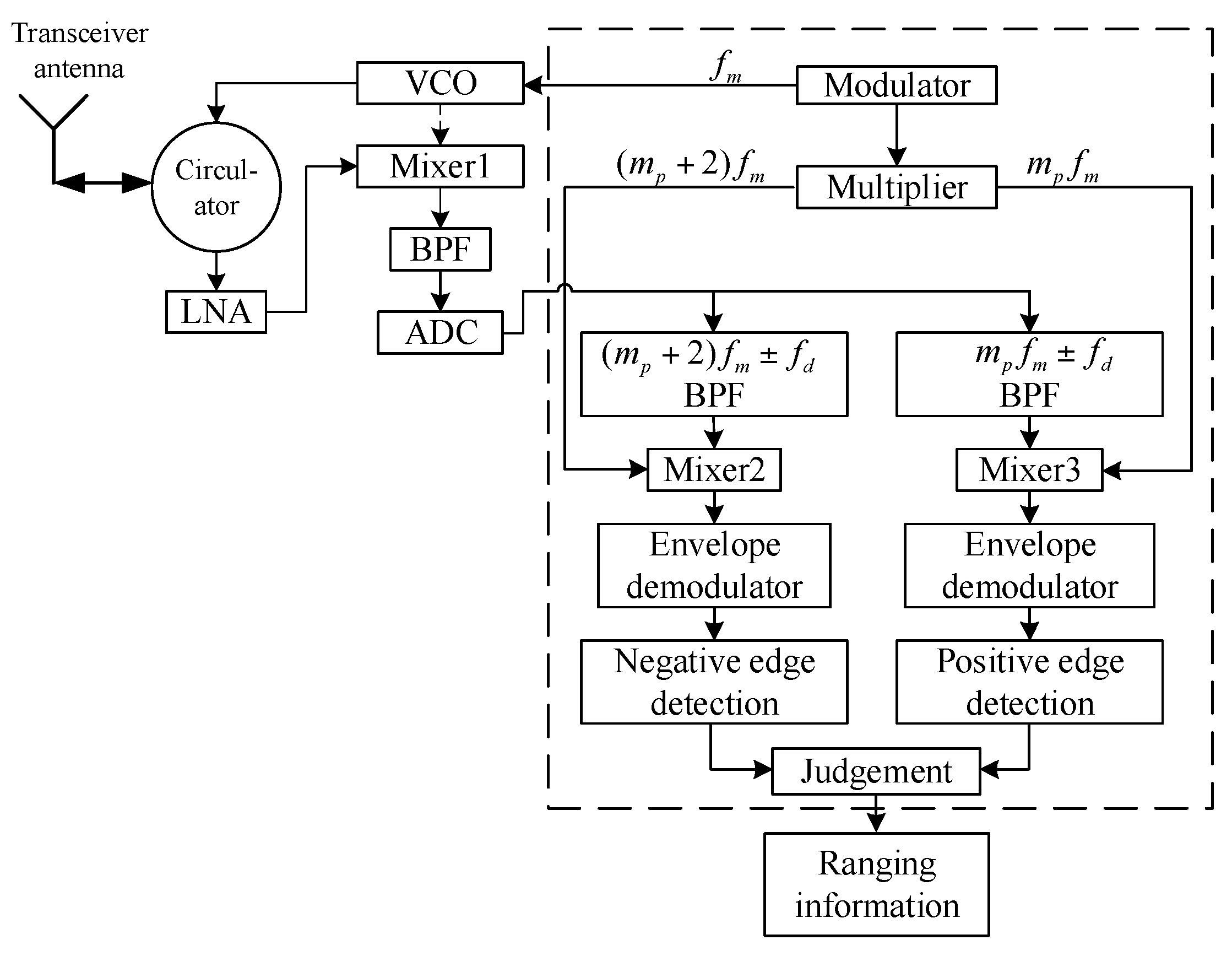
3.1. Multi-Channel Harmonic Timing Sequence Detection Based on BPF
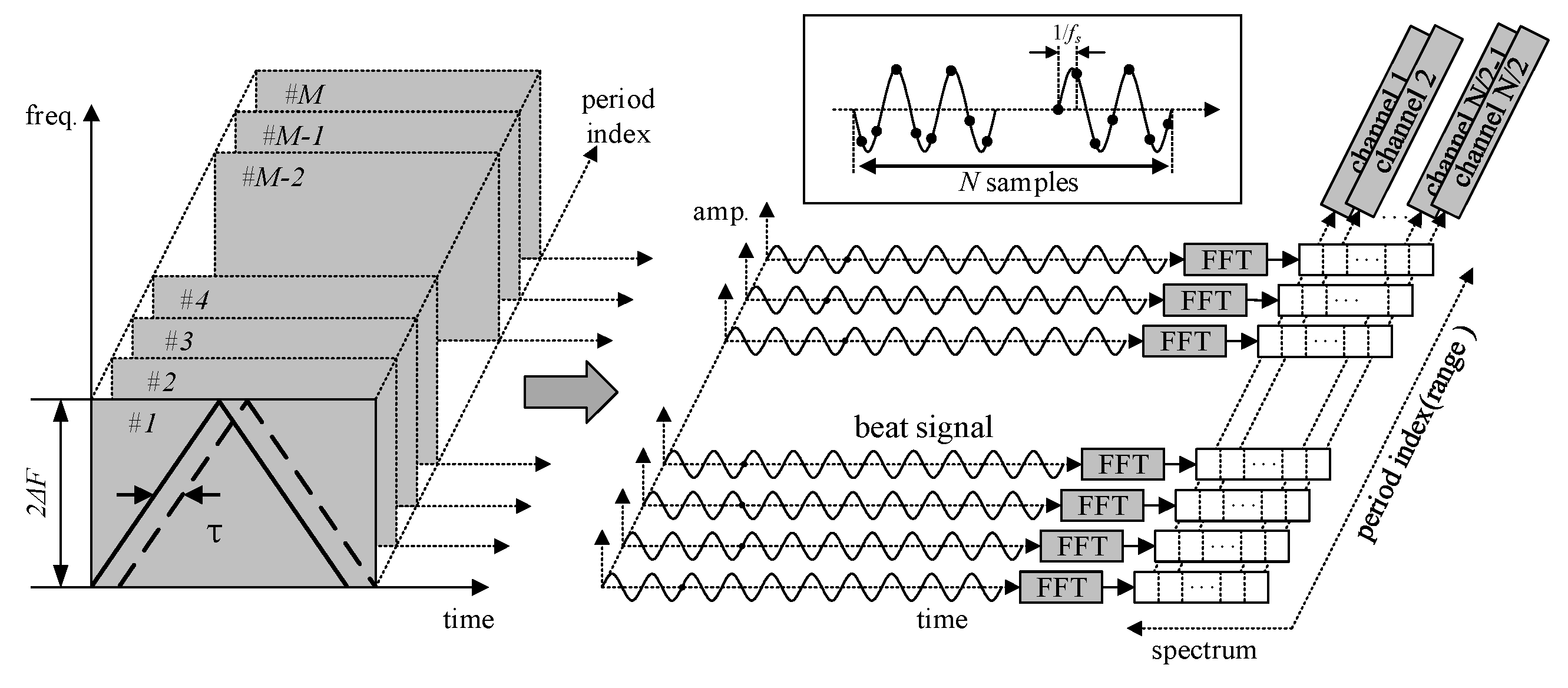
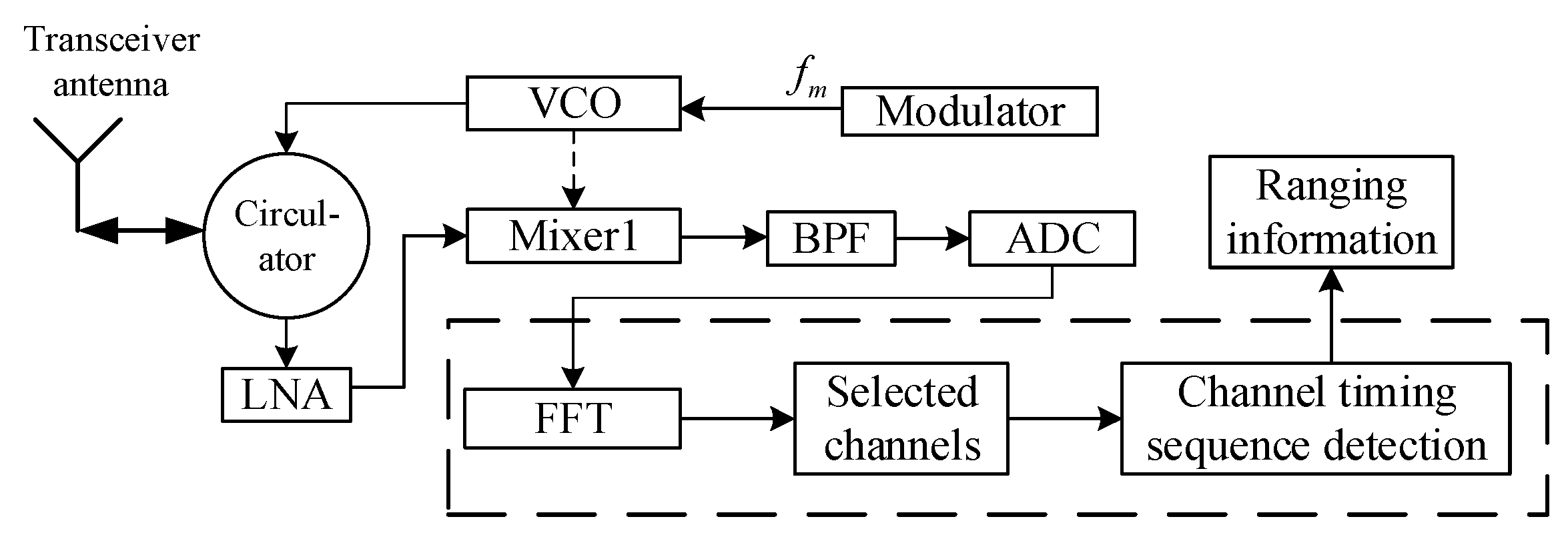
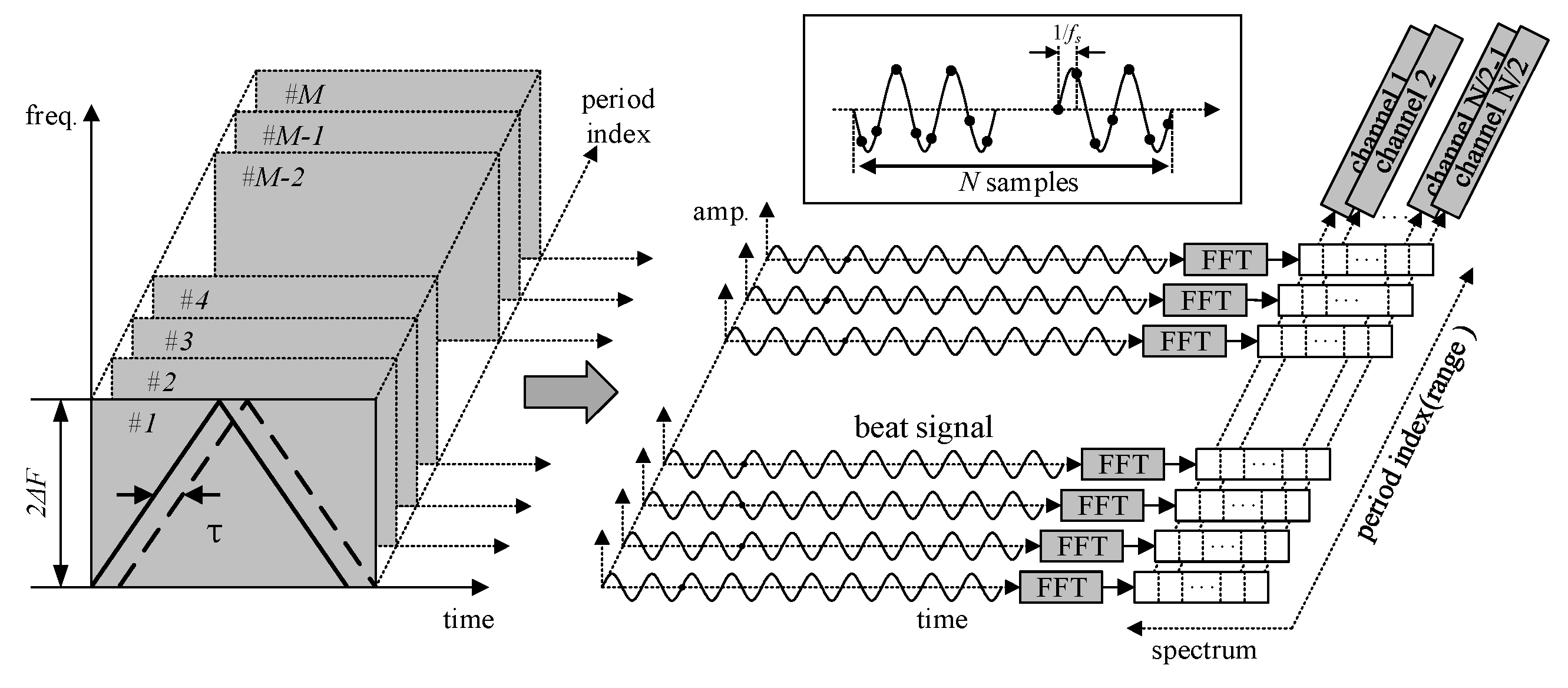
3.2. Multi-Channel Harmonic Timing Sequence Detection Based on FFT
4. Simulated and Measured Results Discussion
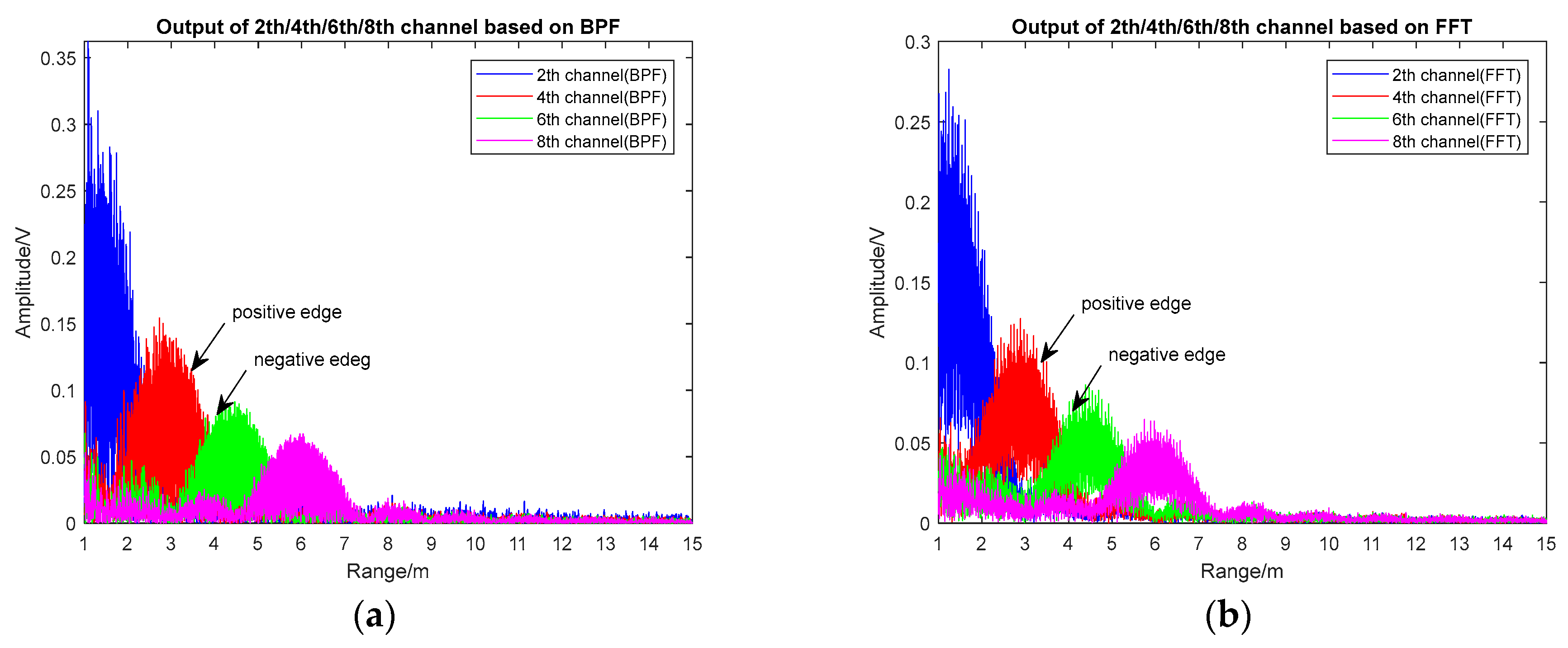
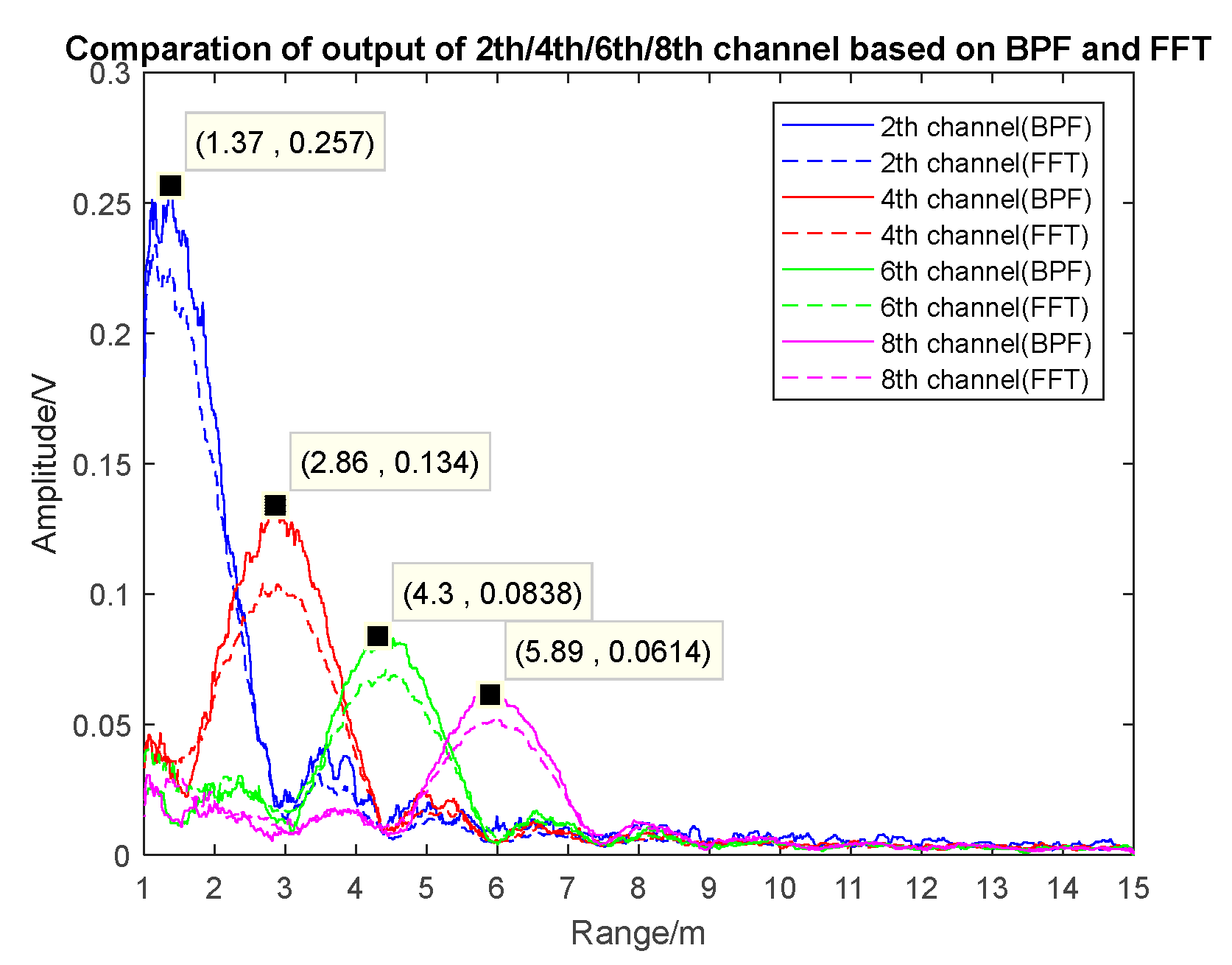
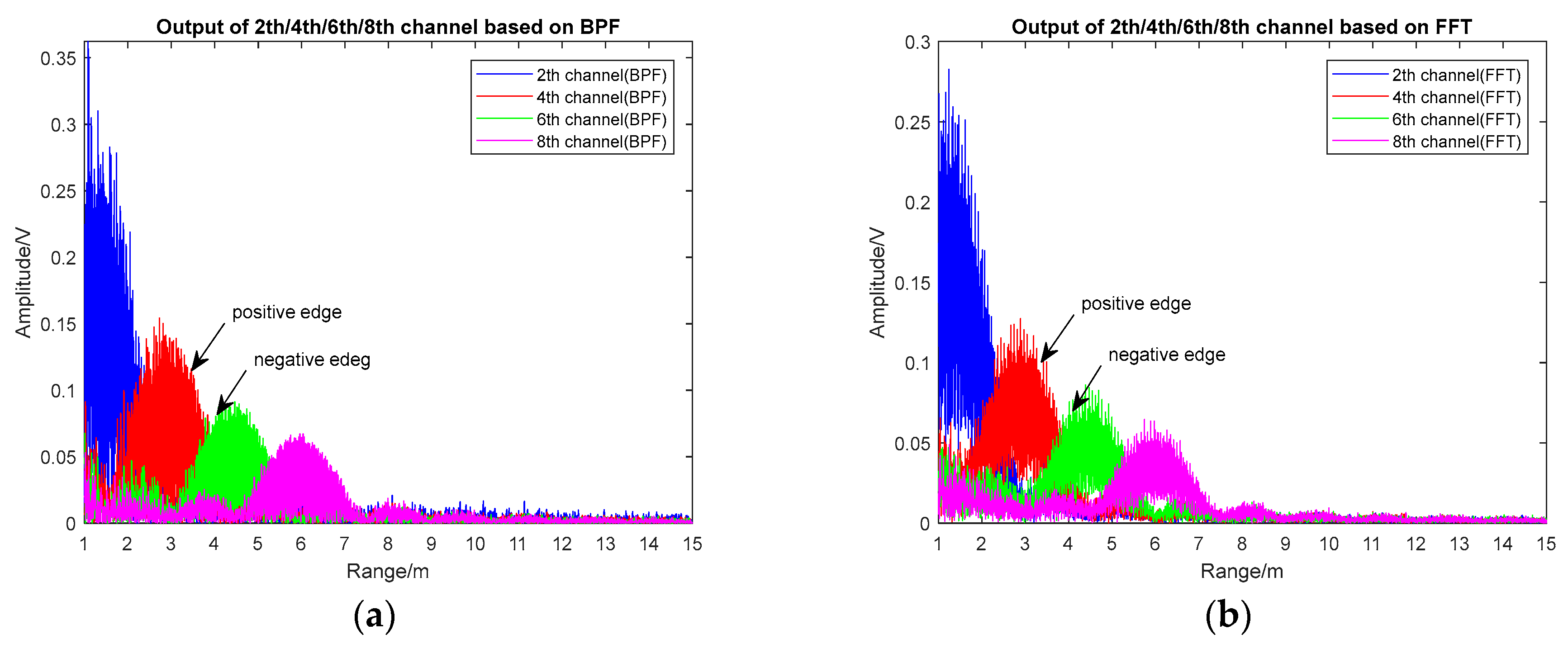
4.1. Ranging Performance Simulation and Analysis
4.2. Implementation Complexity Analysis
4.3. Anti-Jamming Test and Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, C.; Peng, Z.; Huang, T.Y.; Fan, T.; Wang, F.K.; Horng, T.S.; Muñoz-Ferreras, J.-M.; Gómez-García, R.; Ran, L.; Lin, J. A Review on Recent Progress of Portable Short-Range Noncontact Microwave Radar Systems. IEEE Trans. Microw. Theory Tech. 2017, 65, 1692–1706. [Google Scholar] [CrossRef]
- Li, C.L.; Chen, W.; Liu, G.; Yan, R.; Xu, H.; Qi, Y. A Noncontact FMCW Radar Sensor for Displacement Measurement in Structural Health Monitoring. Sensors 2015, 15, 7412–7433. [Google Scholar] [CrossRef] [PubMed]
- Ritchie, M.; Ash, M.; Chen, Q.; Chetty, K. Through Wall Radar Classification of Human Micro-Doppler Using Singular Value Decomposition Analysis. Sensors 2016, 16, 1401. [Google Scholar] [CrossRef] [PubMed]
- Damien, V.; Paul, C.; Roland, C. Localization and Mapping Using Only a Rotating FMCW Radar Sensor. Sensors 2013, 13, 4527–4552. [Google Scholar] [CrossRef]
- Yue, K.; Hao, X.; Li, P. An LFMCW detector with new structure and FRFT based differential distance estimation method. Springer Plus 2016, 5, 922. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.B.; Alvestegui, G.G.; Mcdaniel, J.W.; Li, Y.; Gogineni, S.; Rodriguez-Morales, F.; Brozena, J.; Leuschen, C.J. Ultrawideband FMCW Radar for Airborne Measurements of Snow Over Sea Ice and Land. IEEE Trans. Geosci. Remote Sens. 2017, 55, 834–843. [Google Scholar] [CrossRef]
- Choi, J.H.; Jang, J.H.; Huang, T.Y.; Fan, T.; Wang, F.K.; Horng, T.S.; Muñoz-Ferreras, J.-M.; Gómez-García, R.; Ran, L.; Lin, J. Design of an FMCW radar altimeter for wide-range and low measurement error. IEEE Trans. Instrum. Meas. 2015, 64, 3517–3525. [Google Scholar] [CrossRef]
- Balal, N.; Pinhasi, G.A.; Pinhasi, Y. Atmospheric and Fog Effects on Ultra-Wide Band Radar Operating at Extremely High Frequencies. Sensors 2016, 16, 751. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Chen, J.; Wang, X.; Sun, B. High-Performance Anti-Retransmission Deception Jamming Utilizing Range Direction Multiple Input and Multiple Output (MIMO) Synthetic Aperture Radar (SAR). Sensors 2017, 17, 123. [Google Scholar] [CrossRef] [PubMed]
- Choi, Y.S.; Lee, S.Y.; Choi, H.H.; Lee, S.J.; Park, C.S. The improved spatial nuller with frequency swept jammer. In Proceedings of the Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 1084–1087. [Google Scholar]
- Choi, D.Y.; Kim, W.K.; Kim, J.H.; Cho, H. Performance of analog and digital modulation schemes under sweep jamming. In Proceedings of the Eighth International Conference on Ubiquitous and Future Networks, Vienna, Austria, 5–8 July 2016; pp. 13–15. [Google Scholar]
- Mighani, S.; Mivehchy, M.; Sabahi, M.F. Evaluating sweep noisy barrage jamming effect on tracking radar based on functioning destruction time. In Proceedings of the International Symposium on Telecommunications, Tehran, Iran, 9–11 September 2014; pp. 400–404. [Google Scholar]
- Choi, J.H.; Lee, J.M.; Jung, M.S.; An, J.Y.; Kim, K.L. FMCW transceiver of short-range proximity sensor in sea clutter. Microw. Opt. Technol. Lett. 2017, 59, 334–337. [Google Scholar] [CrossRef]
- Choi, J.H.; Jung, M.S.; Yeom, K.W. A design and assessment of a direction finding proximity fuze sensor. IEEE Sens. J. 2013, 13, 3079–3089. [Google Scholar] [CrossRef]
- You, P.; Liu, Z.; Wang, H.; Wei, X.; Li, X. Dynamic compressed HRRP generation for random stepped-frequency radar based on complex-valued fast sequential homotopy. Sensors 2014, 14, 8283–8304. [Google Scholar] [CrossRef] [PubMed]
- Max, P. New Generation Naval Artillery Multi-Function Fuze. In Proceedings of the 56th Annual Fuze Conference, Baltimore, MD, USA, 12–15 May 2012; pp. 1–20. [Google Scholar]
- Xiao, Z.; Zhang, H. Research on Modeling and Simulation of Echo Signal of Pulse Doppler Fuze and Judgment Criterion of Its Impact. Acta Armament. 2016, 37, 1820–1827. [Google Scholar]
- Huang, Y.; Hao, X.; Kong, Z.; Zhang, B. Recognition of target and jamming signal for FM fuze based on entropy features. Acta Armament. 2017, 38, 254–260. [Google Scholar]
- Li, Z.; Hao, X.; Chen, H.; Li, P. Target signal recognition for CW Doppler proximity radio detector based on SVM. In Proceedings of the International Conference on Mechatronic Sciences, Electric Engineering and Computer, Shengyang, China, 20–22 December 2013; pp. 1160–1163. [Google Scholar]
- Beasley, P. The Influence of Transmitter Phase Noise on FMCW Radar Performance. In Proceedings of the Radar Conference, Manchester, UK, 13–15 September 2006; pp. 331–334. [Google Scholar]
- Fericean, S.; Dorneich, A.; Droxler, R.; Krater, D. Development of a Microwave Proximity Sensor for Industrial Applications. IEEE Sens. J. 2008, 9, 870–876. [Google Scholar] [CrossRef]
- Komarov, I.; Sergey, M. Fundamentals of Short-Range FM Proximity Sensor; Artech House: London, UK, 2003; pp. 111–112. [Google Scholar]
- Zuo, H.Y.; Hao, X.H.; Yue, K. Anti-AM Jamming Performance of FM Doppler Fuze. Available online: http://www.cnki.net/kcms/detail/11.2625.V.20170203.1448.001.html (accessed on 20 July 2017).
- Ayhan, S.; Scherr, S.; Bhutani, A.; Fischbach, B.; Pauli, M.; Zwick, T. Impact of frequency ramp nonlinearity, phase noise, and SNR on FMCW radar accuracy. IEEE Trans. Microw. Theory Tech. 2016, 64, 3290–3301. [Google Scholar] [CrossRef]
- Zhao, H.C. Fundamentals and Methodology of Radio Fuze; National Defense Industry Press: Beijing, China, 2012; pp. 55–56. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Carrier frequency | X-band |
| FM frequency /KHz | 100 |
| Bandwidth of sensor /MHz | 100 |
| Detection range/m | 1–15 |
| Target speed/(m/s) | 500 |
| Sensor sampling frequency/MHz | 5 |
| FFT points | 128 |
| SNR/dB | −10 |
| Parameters | |||
|---|---|---|---|
| Number of Slices Flip Flops | Number of 4 input look-up tabels (LUTs) | Number of MULT18X18s | |
| BPF | 5256 | 4573 | 21 |
| FFT | 1502 | 1281 | 8 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, Z.; Li, P.; Yan, X.; Hao, X. Anti-Sweep Jamming Design and Implementation Using Multi-Channel Harmonic Timing Sequence Detection for Short-Range FMCW Proximity Sensors. Sensors 2017, 17, 2042. https://doi.org/10.3390/s17092042
Kong Z, Li P, Yan X, Hao X. Anti-Sweep Jamming Design and Implementation Using Multi-Channel Harmonic Timing Sequence Detection for Short-Range FMCW Proximity Sensors. Sensors. 2017; 17(9):2042. https://doi.org/10.3390/s17092042
Chicago/Turabian StyleKong, Zhijie, Ping Li, Xiaopeng Yan, and Xinhong Hao. 2017. "Anti-Sweep Jamming Design and Implementation Using Multi-Channel Harmonic Timing Sequence Detection for Short-Range FMCW Proximity Sensors" Sensors 17, no. 9: 2042. https://doi.org/10.3390/s17092042
APA StyleKong, Z., Li, P., Yan, X., & Hao, X. (2017). Anti-Sweep Jamming Design and Implementation Using Multi-Channel Harmonic Timing Sequence Detection for Short-Range FMCW Proximity Sensors. Sensors, 17(9), 2042. https://doi.org/10.3390/s17092042