Validation of a High Sampling Rate Inertial Measurement Unit for Acceleration During Running




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
2.1. Subject
2.2. Protocols
2.3. Data Analysis
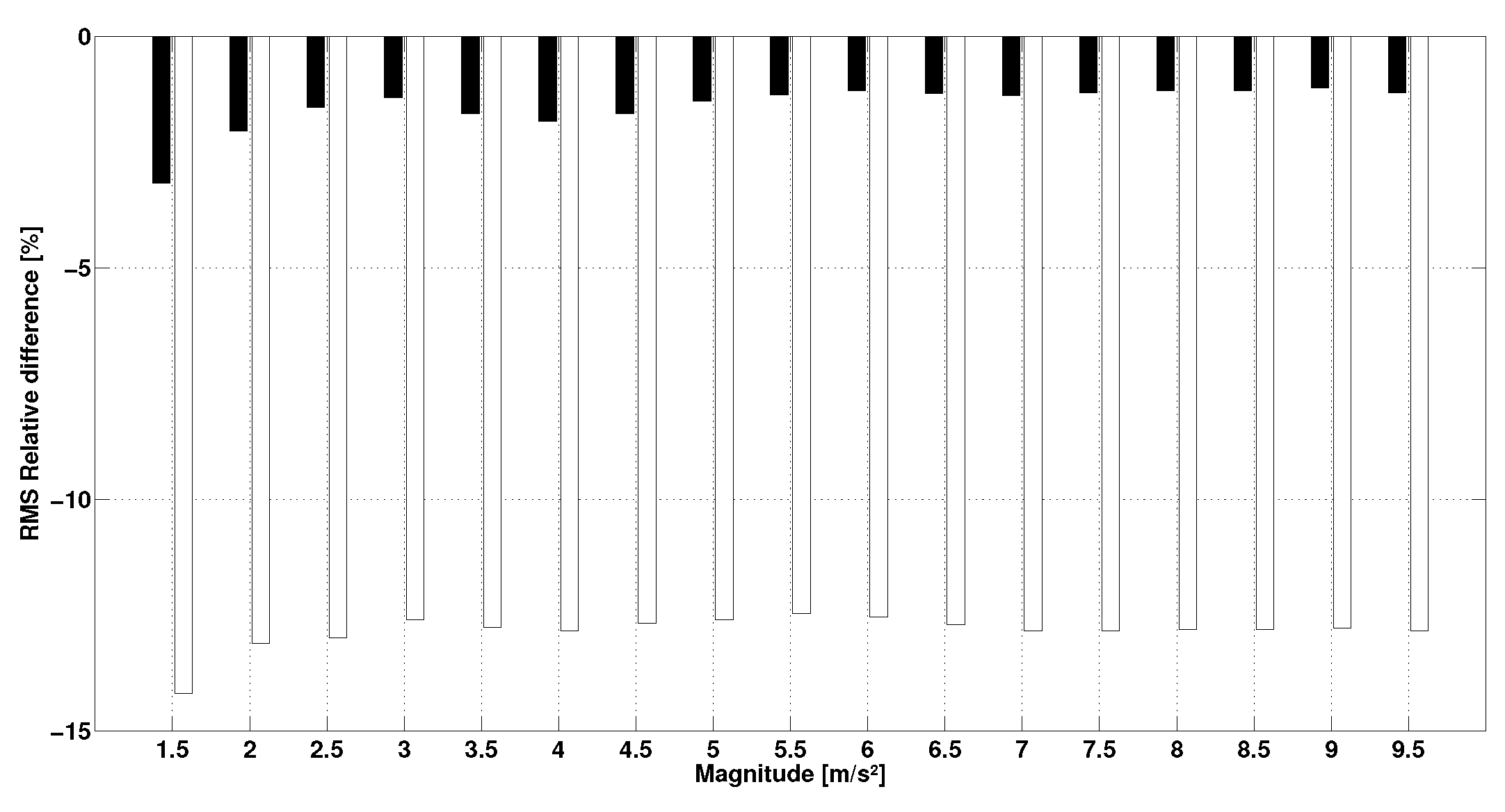
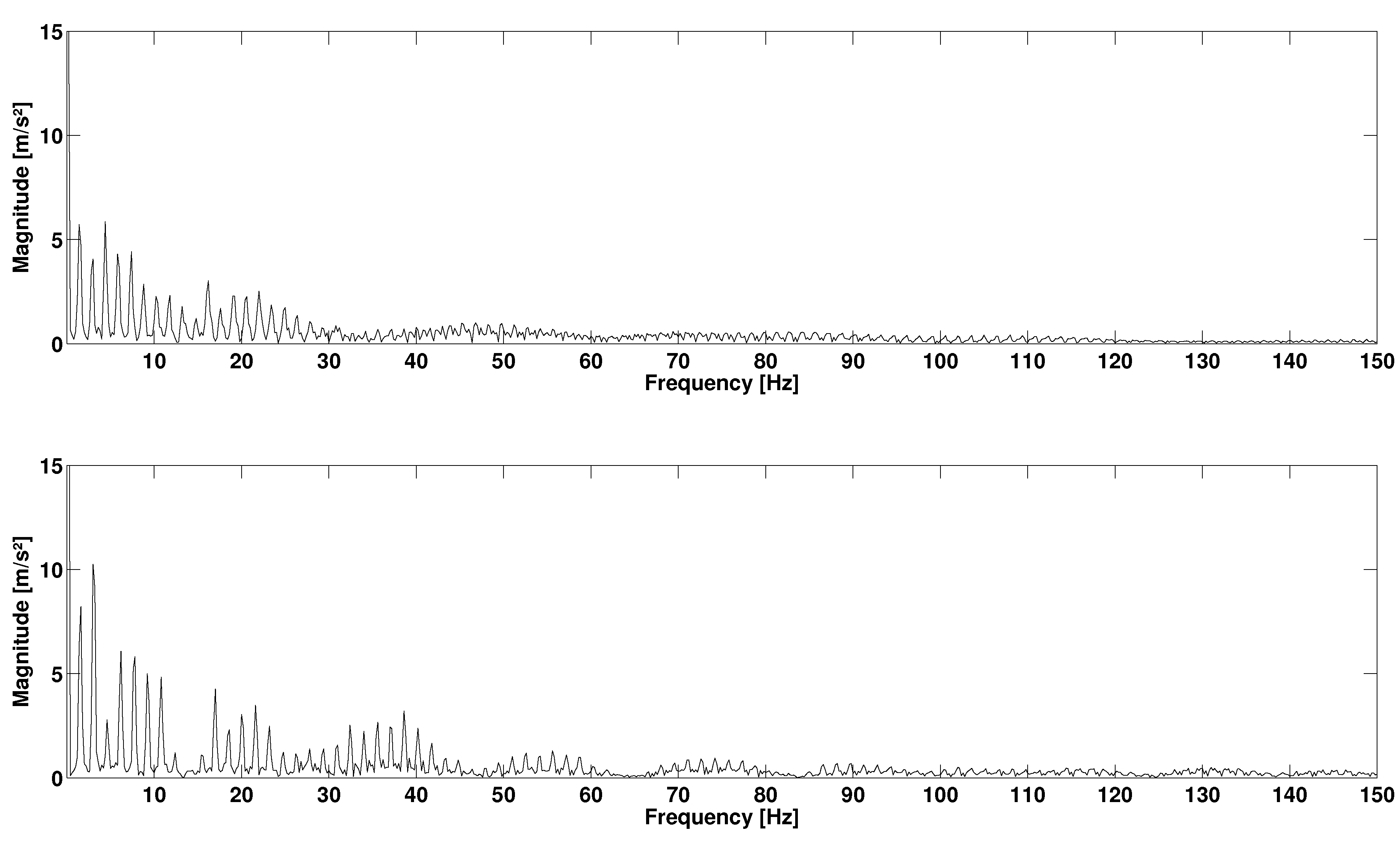
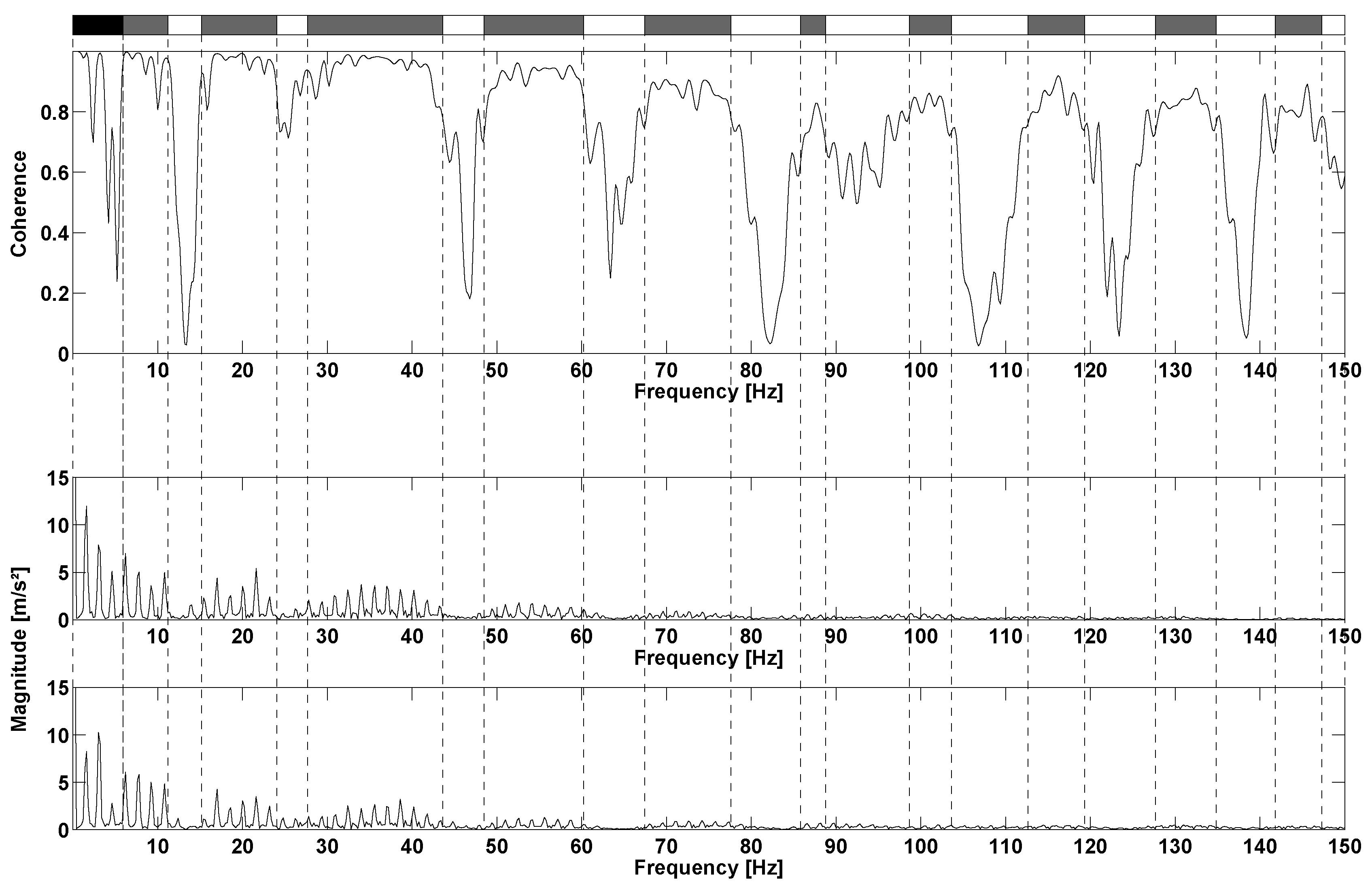
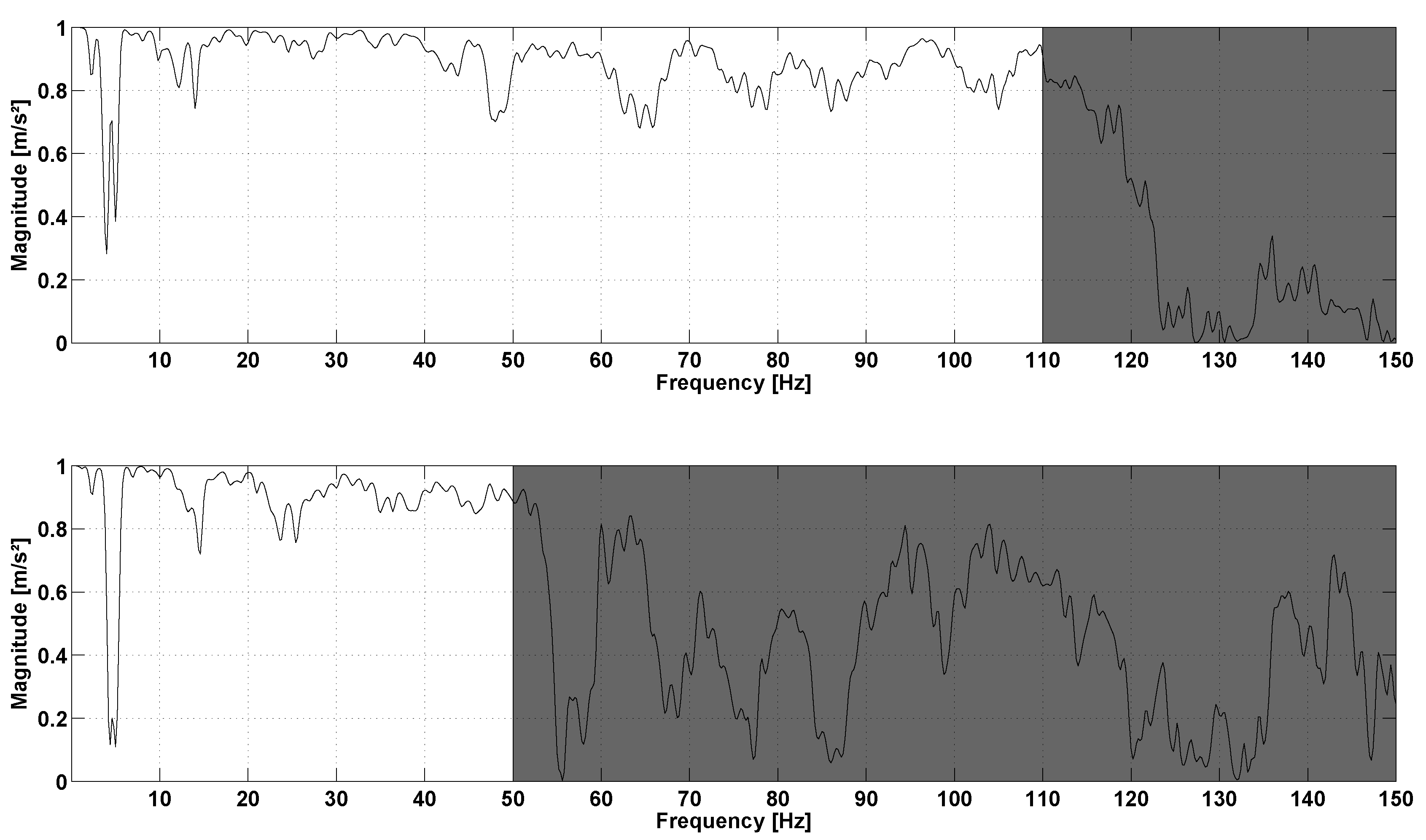
3. Results
4. Discussions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Ethical Statements
References
- Ainsworth, B.E.; Macera, C.A. Physical Activity and Public Health Practice; CRC Press: Boca Raton, FL, USA; p. 343.
- Baarveld, F.; Visser, C.A.N.; Kollen, B.J.; Backx, F.J.G. Sports-related injuries in primary health care. Fam. Pract. 2011, 28, 29–33. [Google Scholar] [CrossRef] [PubMed]
- Hespanhol Junior, L.C.; Barboza, S.D.; van Mechelen, W.; Verhagen, E. Measuring sports injuries on the pitch: A guide to use in practice. Braz. J. Phys. Ther. 2015, 19, 369–380. [Google Scholar] [CrossRef] [PubMed]
- Fredericson, M.; Misra, A.K. Epidemiology and aetiology of marathon running injuries. Sports Med. 2007, 37, 437–439. [Google Scholar] [CrossRef] [PubMed]
- Van Mechelen, W. Running injuries. A review of the epidemiological literature. Sports Med. 1992, 14, 320–335. [Google Scholar] [CrossRef] [PubMed]
- Taunton, J.E. A retrospective case-control analysis of 2002 running injuries. Br. J. Sports Med. 2002, 36, 95–101. [Google Scholar] [CrossRef] [PubMed]
- Bahr, R. Understanding injury mechanisms: A key component of preventing injuries in sport. Br. J. Sports Med. 2005, 39, 324–329. [Google Scholar] [CrossRef] [PubMed]
- Hreljac, A. Impact and overuse injuries in runners. Med. Sci. Sports Exerc. 2004, 36, 845–849. [Google Scholar] [CrossRef] [PubMed]
- Voloshin, A.; Wosk, J. An in vivo study of low back pain and shock absorption in the human locomotor system. J. Biomech. 1982, 15, 21–27. [Google Scholar] [CrossRef]
- Pohl, M.B.; Mullineaux, D.R.; Milner, C.E.; Hamill, J.; Davis, I.S. Biomechanical predictors of retrospective tibial stress fractures in runners. J. Biomech. 2008, 41, 1160–1165. [Google Scholar] [CrossRef] [PubMed]
- Milner, C.E.; Ferber, R.; Pollard, C.D.; Hamill, J.; Davis, I.S. Biomechanical Factors Associated with Tibial Stress Fracture in Female Runners. Med. Sci. Sports Exerc. 2006, 38, 323–328. [Google Scholar] [CrossRef] [PubMed]
- Mizrahi, J.; Verbitsky, O.; Isakov, E.; Daily, D. Effect of fatigue on leg kinematics and impact acceleration in long distance running. Hum. Mov. Sci. 2000, 19, 139–151. [Google Scholar] [CrossRef]
- Friesenbichler, B.; Stirling, L.M.; Federolf, P.; Nigg, B.M. Tissue vibration in prolonged running. J. Biomech. 2011, 44, 116–120. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.B.; Sutter, K.J.; Askew, C.D.; Burkett, B.J. Identifying symmetry in running gait using a single inertial sensor. J. Sci. Med. Sport 2010, 13, 559–563. [Google Scholar] [CrossRef] [PubMed]
- Fu, W.; Fang, Y.; Liu, D.M.S.; Wang, L.; Ren, S.; Liu, Y. Surface effects on in-shoe plantar pressure and tibial impact during running. J. Sport Health Sci. 2015, 4, 384–390. [Google Scholar] [CrossRef]
- Hamill, J.; Derrick, T.; Holt, K. Shock attenuation and stride frequency during running. Hum. Mov. Sci. 1995, 14, 45–60. [Google Scholar] [CrossRef]
- Gruber, A.H.; Boyer, K.A.; Derrick, T.R.; Hamill, J. Impact shock frequency components and attenuation in rearfoot and forefoot running. J. Sport Health Sci. 2014, 3, 113–121. [Google Scholar] [CrossRef]
- Bobbert, M.F.; Schamhardt, H.C.; Nigg, B.M. Calculation of vertical ground reaction force estimates during running from positional data. J. Biomech. 1991, 24, 1095–1105. [Google Scholar] [CrossRef]
- Boyd, L.J.; Ball, K.; Aughey, R.J. The reliability of MinimaxX accelerometers for measuring physical activity in Australian football. Int. J. Sports Physiol. Perform. 2011, 6, 311–321. [Google Scholar] [CrossRef] [PubMed]
- Patterson, M.; McGrath, D.; Caulfield, B. Using a tri-axial accelerometer to detect technique breakdown due to fatigue in distance runners: A preliminary perspective. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 6511–6514. [Google Scholar]
- Elvin, N.G.; Elvin, A.A.; Arnoczky, S.P. Correlation between ground reaction force and tibial acceleration in vertical jumping. J. Appl. Biomech. 2007, 23, 180–189. [Google Scholar] [CrossRef] [PubMed]
- Busa, M.A.; Lim, J.; van Emmerik, R.E.A.; Hamill, J. Head and Tibial Acceleration as a Function of Stride Frequency and Visual Feedback during Running. PLoS ONE 2016, 11, e0157297. [Google Scholar] [CrossRef] [PubMed]
- Chelius, G.; Braillon, C.; Pasquier, M.; Horvais, N.; Gibollet, R.P.; Espiau, B.; Azevedo Coste, C. A Wearable Sensor Network for Gait Analysis: A Six-Day Experiment of Running Through the Desert. IEEE/ASME Trans. Mechatron. 2011, 16, 878–883. [Google Scholar] [CrossRef]
- Barrett, R.; Channells, J.; James, D.; Purcell, B. Use of accelerometers for detecting foot-ground contact time during running. In Proceedings of the SPIE Symposium on Microelectronics, MEMS, and Nanotechnology, Brisbane, Australia, 11–14 December 2005. [Google Scholar]
- Neville, J.; Wixted, A.; Rowlands, D.; James, D. Accelerometers: An underutilized resource in sports monitoring. In Proceeding of the 2010 Sixth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Brisbane, Australia, 7–10 December 2010; pp. 287–290. [Google Scholar]
- Horvais, N.; Giandolini, M. Foot strike pattern during downhill trail running. Footwear Sci. 2013, 5, S26–S27. [Google Scholar] [CrossRef]
- Giandolini, M.; Pavailler, S.; Samozino, P.; Morin, J.B.; Horvais, N. Foot strike pattern and impact continuous measurements during a trail running race: proof of concept in a world-class athlete. Footwear Sci. 2015, 7, 127–137. [Google Scholar] [CrossRef]
- Liu, W. Structural Dynamic Analysis and Testing of Couple Structures. Ph.D. Thesis, University of London, London, UK, 2000. [Google Scholar]
- Ewins, D.J. Modal Testing: Theory and Practice; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1984. [Google Scholar]
- Griffin, M.J. Handbook of Human Vibration; Academic Press: Waltham, MA, USA, 1990. [Google Scholar]
- Winter, D.A. Biomechanics and Motor Control of Human Movement; John Wiley & Sons: New York, NY, USA, 1990. [Google Scholar]
- Decker, C.; Prasad, N.; Kawchuk, G.N. The reproducibility of signals from skin-mounted accelerometers following removal and replacement. Gait Posture 2011, 34, 432–434. [Google Scholar] [CrossRef] [PubMed]
- Lafortune, M.A. Three-dimensional acceleration of the tibia during walking and running. J. Biomech. 1991, 24, 877–886. [Google Scholar] [CrossRef]
- Crowell, H.P.; Milner, C.E.; Hamill, J.; Davis, I.S. Reducing Impact Loading During Running With the Use of Real-Time Visual Feedback. J. Orthop. Sports Phys. Ther. 2010, 40, 206–213. [Google Scholar] [CrossRef] [PubMed]
- Davis, I.; Milner, C.E.; Hamill, J. Does Increased Loading During Running Lead to Tibial Stress Fractures? A Prospective Study. Med. Sci. Sports Exerc. 2004, 36, S58. [Google Scholar]
- Hennig, E.M.; Lafortune, M.A. Relationships between Ground Reaction Force and Tibial Bone Acceleration Parameters. Int. J. Sport Biomech. 1991, 7, 303–309. [Google Scholar] [CrossRef]
- Gross, T.S.; Nelson, R.C. The shock attenuation role of the ankle during landing from a vertical jump. Med. Sci. Sports Exerc. 1988, 20, 506–514. [Google Scholar] [CrossRef] [PubMed]
- Ziegert, J.C.; Lewis, J.L. The Effect of Soft Tissue on Measurements of Vibrational Bone Motion by Skin-Mounted Accelerometers. J. Biomech. Eng. 1979, 101, 218. [Google Scholar] [CrossRef]
- Roberts, J.R.; Jones, R.; Mansfield, N.J.; Rothberg, S.J. Evaluation of vibrotactile sensations in the ‘feel’ of a golf shot. J. Sound Vib. 2005, 285, 303–319. [Google Scholar] [CrossRef]
- Kuchařová, M.; Ďoubal, S.; Klemera, P.; Rejchrt, P.; Navrátil, M. Viscoelasticity of biological materials — Measurement and practical impact on biomedicine. Physiol. Res. 2007, 56, 33–37. [Google Scholar]
- Lucas-Cuevas, A.G.; Encarnación-Martínez, A.; Camacho-García, A.; Llana-Belloch, S.; Pérez-Soriano, P. The location of the tibial accelerometer does influence impact acceleration parameters during running. J. Sports Sci. 2016, 1–5. [Google Scholar] [CrossRef] [PubMed]
- Reenalda, J.; Maartens, E.; Homan, L.; Buurke, J. Continuous three dimensional analysis of running mechanics during a marathon by means of inertial magnetic measurement units to objectify changes in running mechanics. J. Biomech. 2016, 49, 3362–3367. [Google Scholar] [CrossRef] [PubMed]









© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Provot, T.; Chiementin, X.; Oudin, E.; Bolaers, F.; Murer, S. Validation of a High Sampling Rate Inertial Measurement Unit for Acceleration During Running. Sensors 2017, 17, 1958. https://doi.org/10.3390/s17091958
Provot T, Chiementin X, Oudin E, Bolaers F, Murer S. Validation of a High Sampling Rate Inertial Measurement Unit for Acceleration During Running. Sensors. 2017; 17(9):1958. https://doi.org/10.3390/s17091958
Chicago/Turabian StyleProvot, Thomas, Xavier Chiementin, Emeric Oudin, Fabrice Bolaers, and Sébastien Murer. 2017. "Validation of a High Sampling Rate Inertial Measurement Unit for Acceleration During Running" Sensors 17, no. 9: 1958. https://doi.org/10.3390/s17091958
APA StyleProvot, T., Chiementin, X., Oudin, E., Bolaers, F., & Murer, S. (2017). Validation of a High Sampling Rate Inertial Measurement Unit for Acceleration During Running. Sensors, 17(9), 1958. https://doi.org/10.3390/s17091958