
Compensating Unknown Time-Varying Delay in Opto-Electronic Platform Tracking Servo System

Abstract
:1. Introduction
2. Problem Statement
3. Proposed Method
3.1. Time-Varying Delay Model Setup
3.2. Controller System Design
- (1)
- Select minimal γ > 0 and i ∈ S which can satisfy Equations (18)–(20). γ is a constant that is selected by testing experiment to satisfy the requirement of engineering and i is time-varying.
- (2)
- Prediction:where Pi(k+1|k) and Ri(k) are shown in Equations (19) and (20).
- (3)
- Measurement update:
- (4)
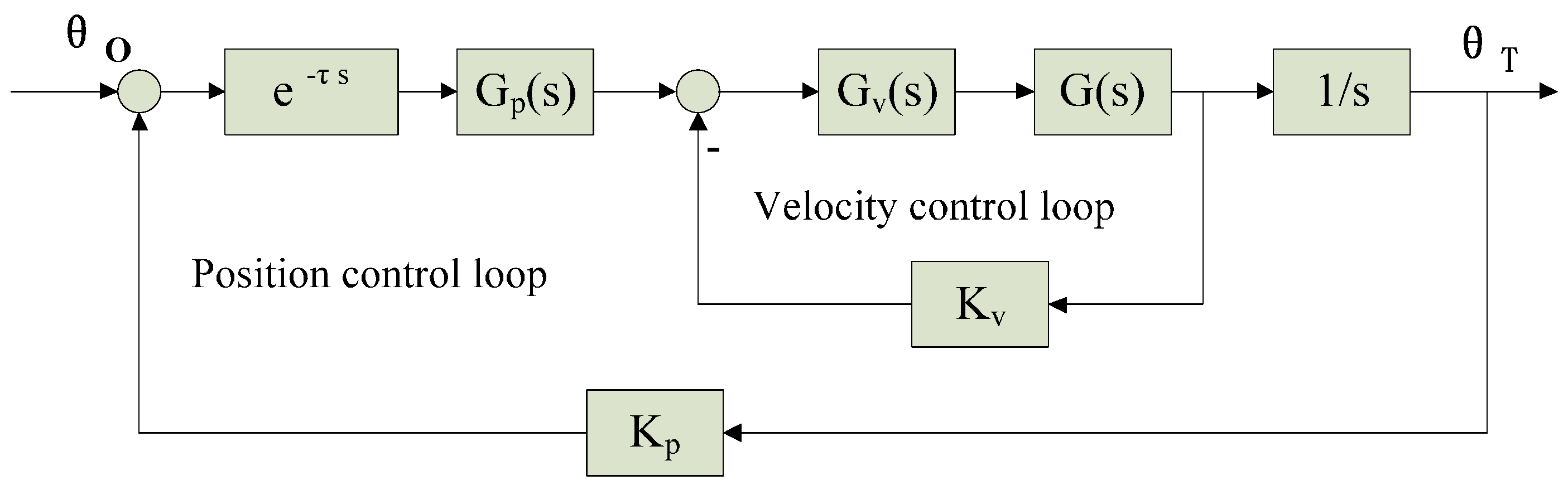
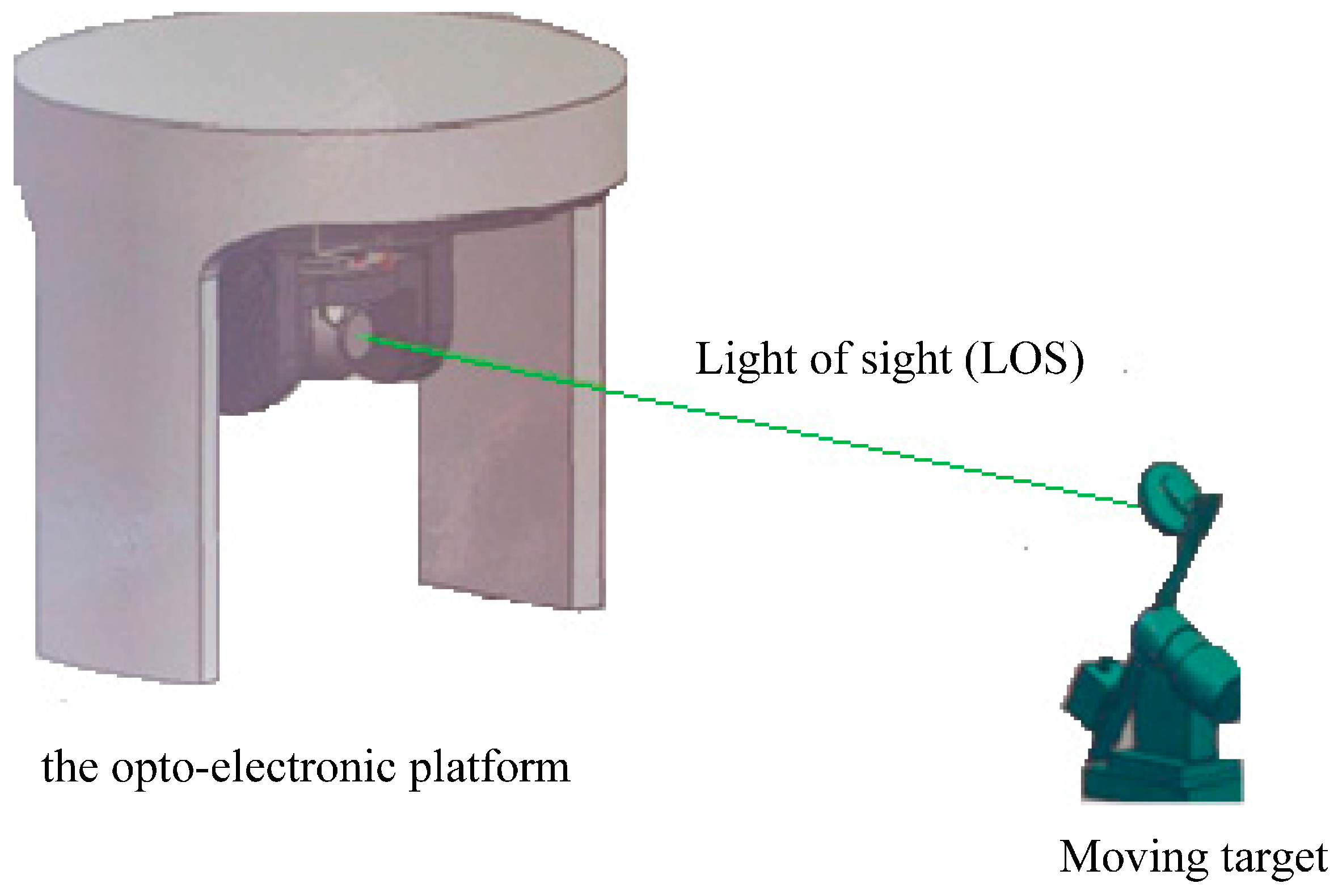
- Transmitting current data:As shown in Figure 6, we transmit the current position and velocity to position/velocity control loop separately after feed-forward forecasting. The DC motor was controlled by servo system to produce the corresponding movement for eliminating miss-distance and tracking the target.
4. Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Krstic, M. Lyapunov stability of linear predictor feedback for time-varying input delay. IEEE Trans. Autom. Control 2010, 55, 554–559. [Google Scholar] [CrossRef]
- Bekiaris-Liberis, N.; Krstic, M. Delay-adaptive feedback for liner feedforward systems. Syst. Control Lett. 2010, 59, 277–283. [Google Scholar] [CrossRef]
- Bekiaris-Liberis, N.; Krstic, M. Stabilization of linear strict-feedback systems with delayed integrators. Automatica 2010, 46, 1902–1910. [Google Scholar] [CrossRef]
- Bekiaris-Liberis, N.; Krstic, M. Lyapunov stability of linear predictor feedback for distributed input delays. IEEE Trans. Autom. Control 2011, 56, 655–660. [Google Scholar] [CrossRef]
- Krstic, M. Compensation of infinite-dimensional actuator and sensor dynamics. IEEE Control Syst. Mag. 2010, 30, 22–41. [Google Scholar] [CrossRef]
- Li, Z.J.; Chen, Z.T. Direct adaptive controller for uncertain MIMO dynamic systems with time-varying delay and dead-zone inputs. Automatica 2016, 63, 287–291. [Google Scholar] [CrossRef]
- Zhou, B.; Egorov, A.V. Razumikhin and Krasovskii stability theorems for time-varying time-delay systems. Automatica 2016, 71, 281–291. [Google Scholar] [CrossRef]
- Zhou, B.; Lin, Z.L.; Duan, G.R. Truncated predictor feedback for linear systems with long time-varying input delays. Automatica 2012, 48, 2387–2399. [Google Scholar] [CrossRef]
- Mazenc, F.; Malisoff, M.; Niculescu, S.I. Reduction model approach for linear time-varying systems with delays. IEEE Trans. Autom. Control 2014, 59, 2068–2082. [Google Scholar] [CrossRef]
- Cacace, F.; Germani, A.; Manes, C. An observer for a class of nonlinear systems with time varying observation delay. Syst. Control Lett. 2010, 59, 305–312. [Google Scholar] [CrossRef]
- Mazenc, F.; Malisoff, M. Stability analysis for time-varying systems with delay using linear Lyapunov functionals and a positive systems approach. IEEE Trans. Autom. Control 2016, 61, 771–776. [Google Scholar] [CrossRef]
- Ghanes, M.; De, L.J.; Barbot, J.P. Observer design for nonlinear systems under unknown time-varying delays. IEEE Trans. Autom. Control 2013, 58, 1529–1534. [Google Scholar] [CrossRef]
- Mathiyalagan, K.; Park, J.H. Robust mixed H∞ and passive filtering for networked Markov jump systems with impulses. Signal Process. 2014, 101, 162–173. [Google Scholar] [CrossRef]
- Yang, R.; Shi, P.; Liu, G. Filtering for discrete-time networked non-linear systems with mixed random delays and packet dropouts. IEEE Trans. Autom. Control 2011, 56, 2655–2660. [Google Scholar] [CrossRef]
- Cheng, J.; Zhu, H.; Zhong, S.; Zeng, Y.; Dong, X. Finite-time H∞ control for a class of Markovian jump systems with mode-dependent time-varying delays via new Lyapunov functional. ISA Trans. 2013, 52, 768–774. [Google Scholar] [CrossRef] [PubMed]
- Zhou, S.; Feng, G. H∞ filtering for discrete-time systems with randomly varying sensor delays. Automatica 2008, 44, 1918–1922. [Google Scholar] [CrossRef]
- Wu, Z.G.; Park, J.H.; Su, H.; Song, B.; Chu, J. Mixed H∞ and passive filtering for singular systems with time delays. Signal Process. 2013, 93, 1705–1711. [Google Scholar] [CrossRef]
- Zhuang, G.; Xu, S.; Zhang, B.; Xia, J.; Chu, Y. Unified filters design for singular Markovian jump systems with time-varying delays. J. Franklin Inst. 2016, 353, 3739–3768. [Google Scholar] [CrossRef]
- Zhang, W.; Zhao, Y.; Sheng, L. Some remarks on stability of stochastic singular systems with state-dependent noise. Automatica 2015, 51, 273–277. [Google Scholar] [CrossRef]
- Ma, Y.; Gu, N.; Zhang, Q. Non-fragile robust H∞ control for uncertain discrete-time singular systems with time-varying delays. J. Franklin Inst. 2014, 351, 3163–3181. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I: Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part V: Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Yu, Y.H.; Cheng, Q.S. Particle filters for maneuvering target tracking problem. Signal Process. 2006, 86, 195–203. [Google Scholar] [CrossRef]
- Rambabu, K.; Bjarne, F.; Lars, I. Applying the unscented Kalman filter for nonlinear state estimation. J. Process Control 2008, 18, 753–768. [Google Scholar]
- Ristic, B.; Arulampalam, M.S. Tracking a manoeuvring target using angle-only measurements: Algorithms and performance. Signal Process. 2003, 83, 1223–1238. [Google Scholar] [CrossRef]
- Hernandez, M.L.; Ristic, B.; Farina, A. Performance measure for Markovian switching systems using best-fitting Gaussian distributions. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 724–747. [Google Scholar] [CrossRef]
- Li, W.L.; Jia, Y.M. Distributed interacting multiple model H∞ filtering fusion for multiplatform maneuvering target tracking in clutter. Signal Process. 2010, 90, 1655–1668. [Google Scholar] [CrossRef]
- Jankovic, M. Forwarding, backstepping, and finite spectrum assignment for time delay systems. Automatica 2009, 45, 2–9. [Google Scholar] [CrossRef]
- Chen, F.; Yuan, W. Design and Implementation of an Optimized Double Closed-Loop Control System for MEMS Vibratory Gyroscope. IEEE Sens. J. 2014, 14, 184–196. [Google Scholar] [CrossRef]
- Steven, L.C. Track Loop Bandwidth, Sensor Sample Frequency, and Track Loop Delays. In Proceedings of the Acquisition, Tracking, and Pointing XII, Orlando, FL, USA, 13 April 1998; pp. 69–76. [Google Scholar]
- Tsang, K.M.; Lo, W.L.; Rad, A.B. Adaptive delay compensated PID controller by phase margin design. ISA Trans. 1998, 37, 177–187. [Google Scholar] [CrossRef]
- Srivastava, S.; Pandit, V.S. A PI/PID controller for time delay systems with desired closed loop time response and guaranteed gain and phase margins. J. Process Control 2016, 37, 70–77. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Situation/Method | RMS Error |
|---|---|
| without compensating delay | 1.6474°/28.75 mrad |
| Kalman filter | 0.3022°/5.274 mrad |
| H∞ filter | 0.1839°/3.209 mrad |
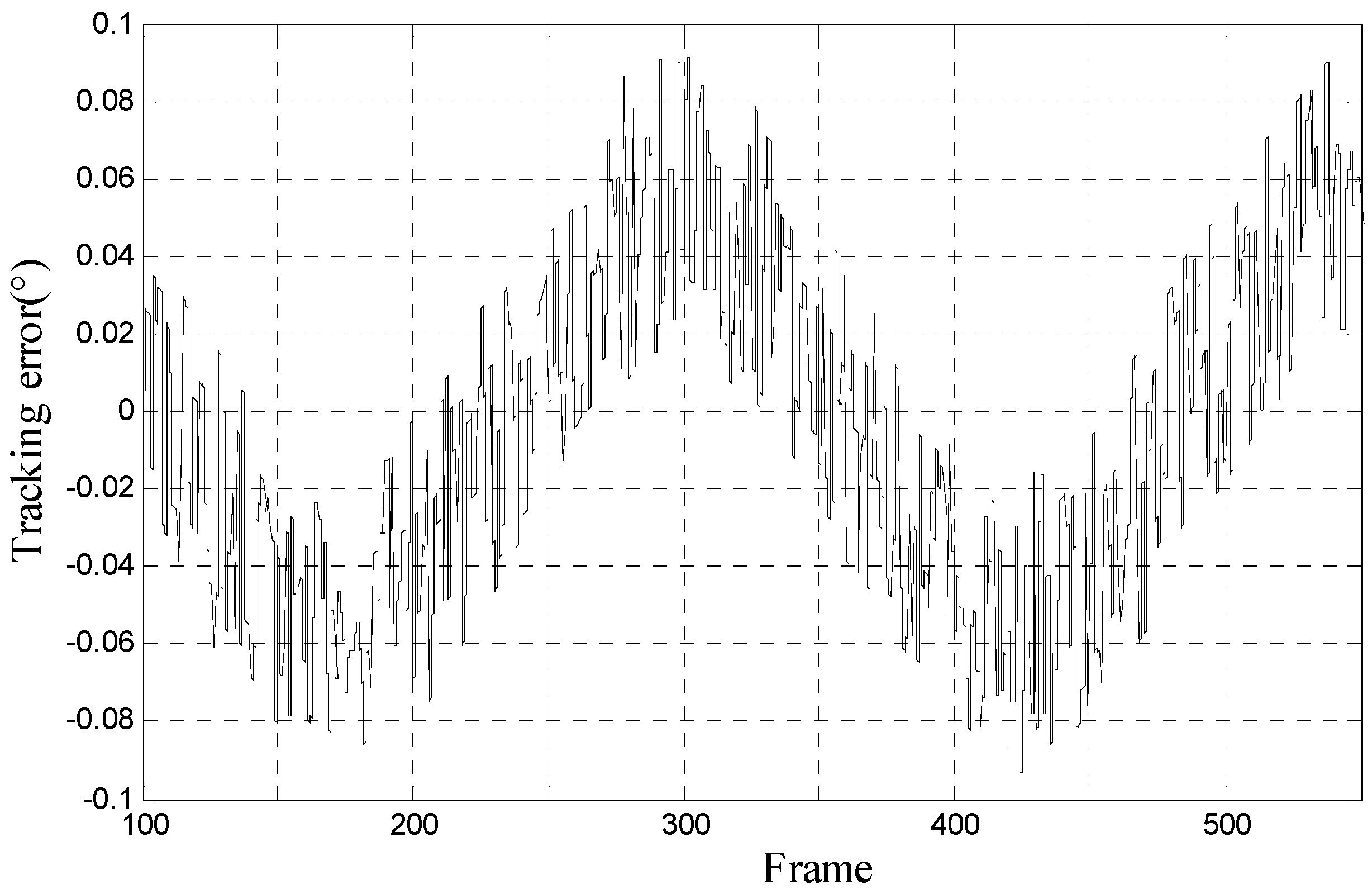
| Proposed method | 0.0673°/1.175 mrad |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, R.; Zhang, T.; Li, J.; Dai, M. Compensating Unknown Time-Varying Delay in Opto-Electronic Platform Tracking Servo System. Sensors 2017, 17, 1071. https://doi.org/10.3390/s17051071
Xie R, Zhang T, Li J, Dai M. Compensating Unknown Time-Varying Delay in Opto-Electronic Platform Tracking Servo System. Sensors. 2017; 17(5):1071. https://doi.org/10.3390/s17051071
Chicago/Turabian StyleXie, Ruihong, Tao Zhang, Jiaquan Li, and Ming Dai. 2017. "Compensating Unknown Time-Varying Delay in Opto-Electronic Platform Tracking Servo System" Sensors 17, no. 5: 1071. https://doi.org/10.3390/s17051071
APA StyleXie, R., Zhang, T., Li, J., & Dai, M. (2017). Compensating Unknown Time-Varying Delay in Opto-Electronic Platform Tracking Servo System. Sensors, 17(5), 1071. https://doi.org/10.3390/s17051071