
A Method of Sky Ripple Residual Nonuniformity Reduction for a Cooled Infrared Imager and Hardware Implementation


Abstract
:1. Introduction
2. Methods
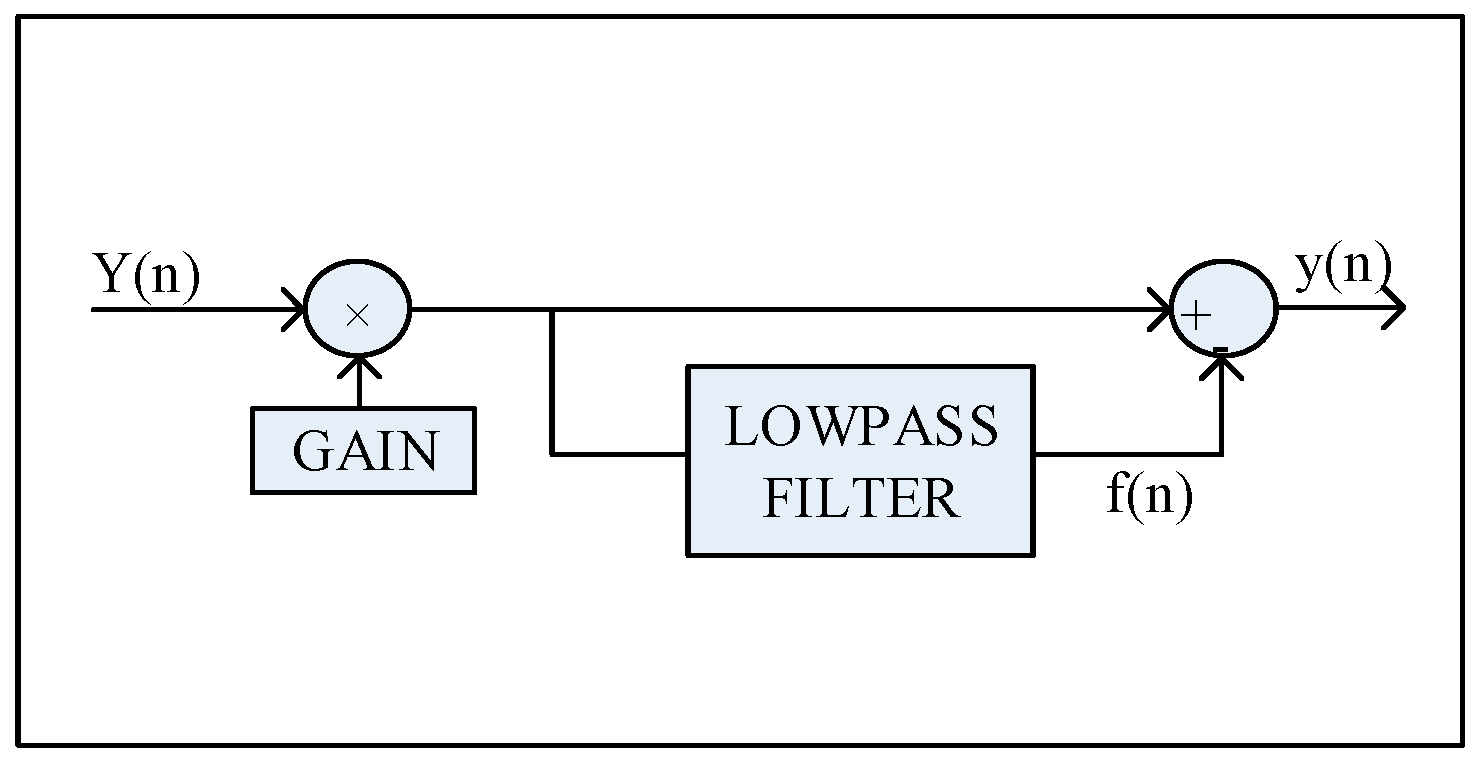
2.1. The Correction Process
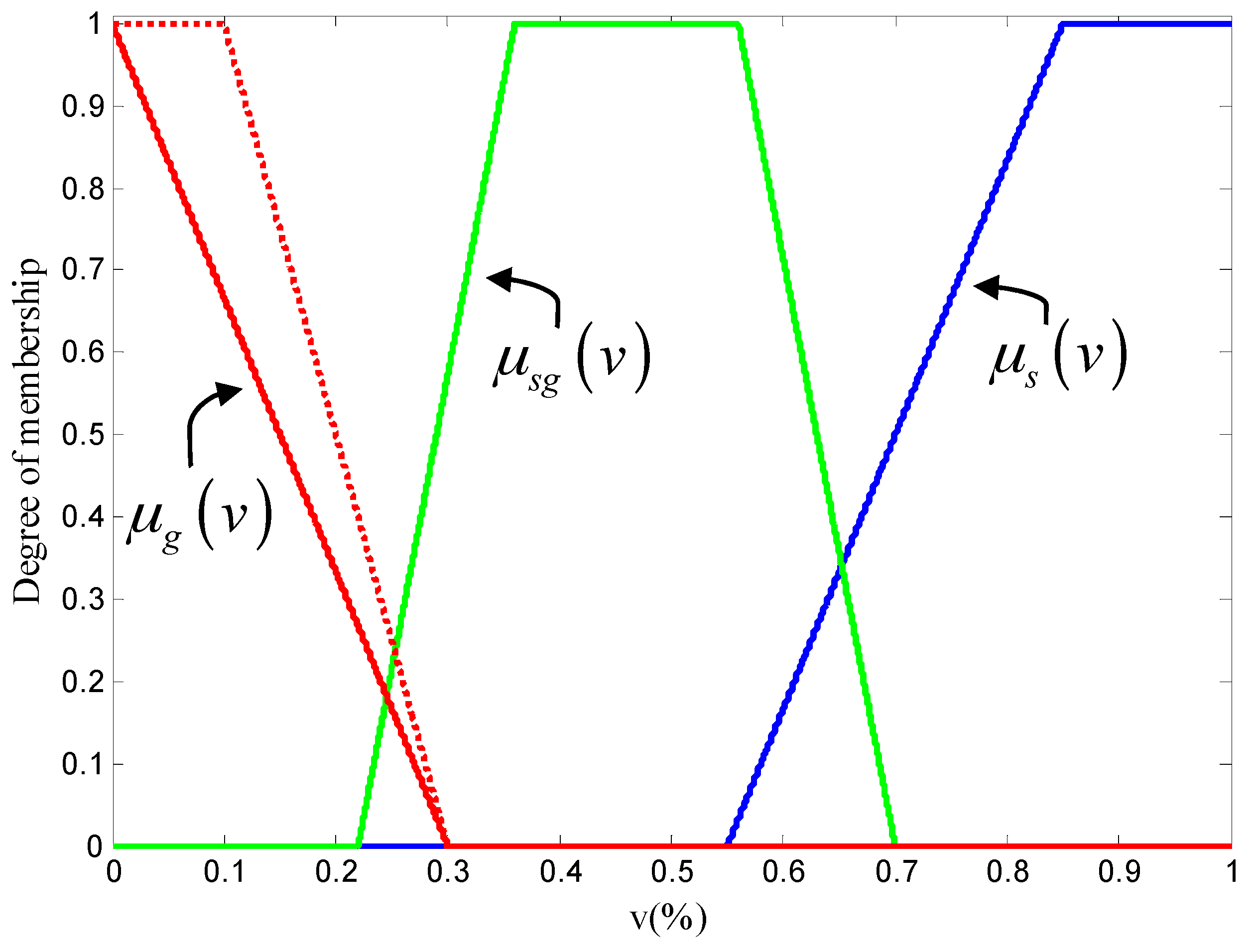
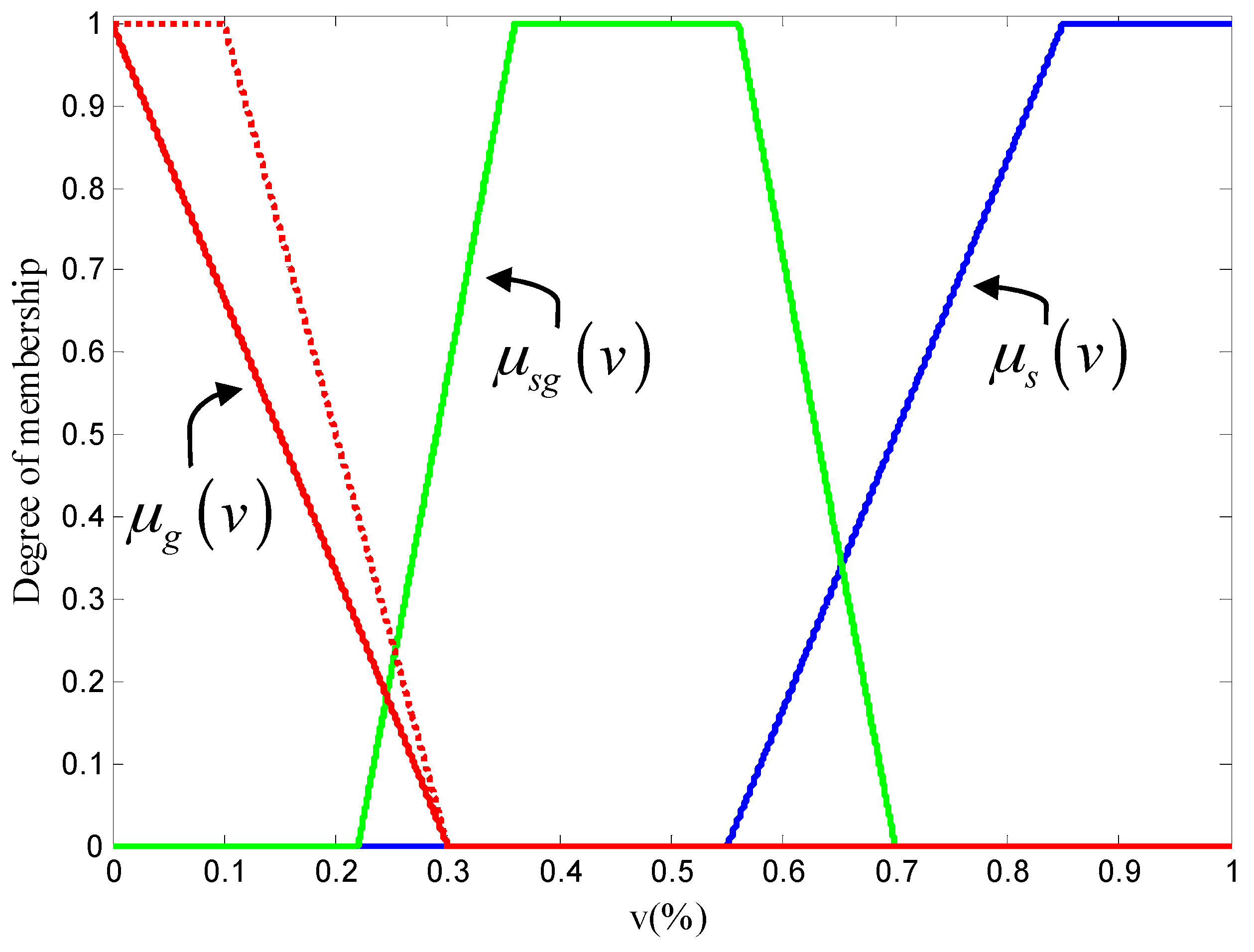
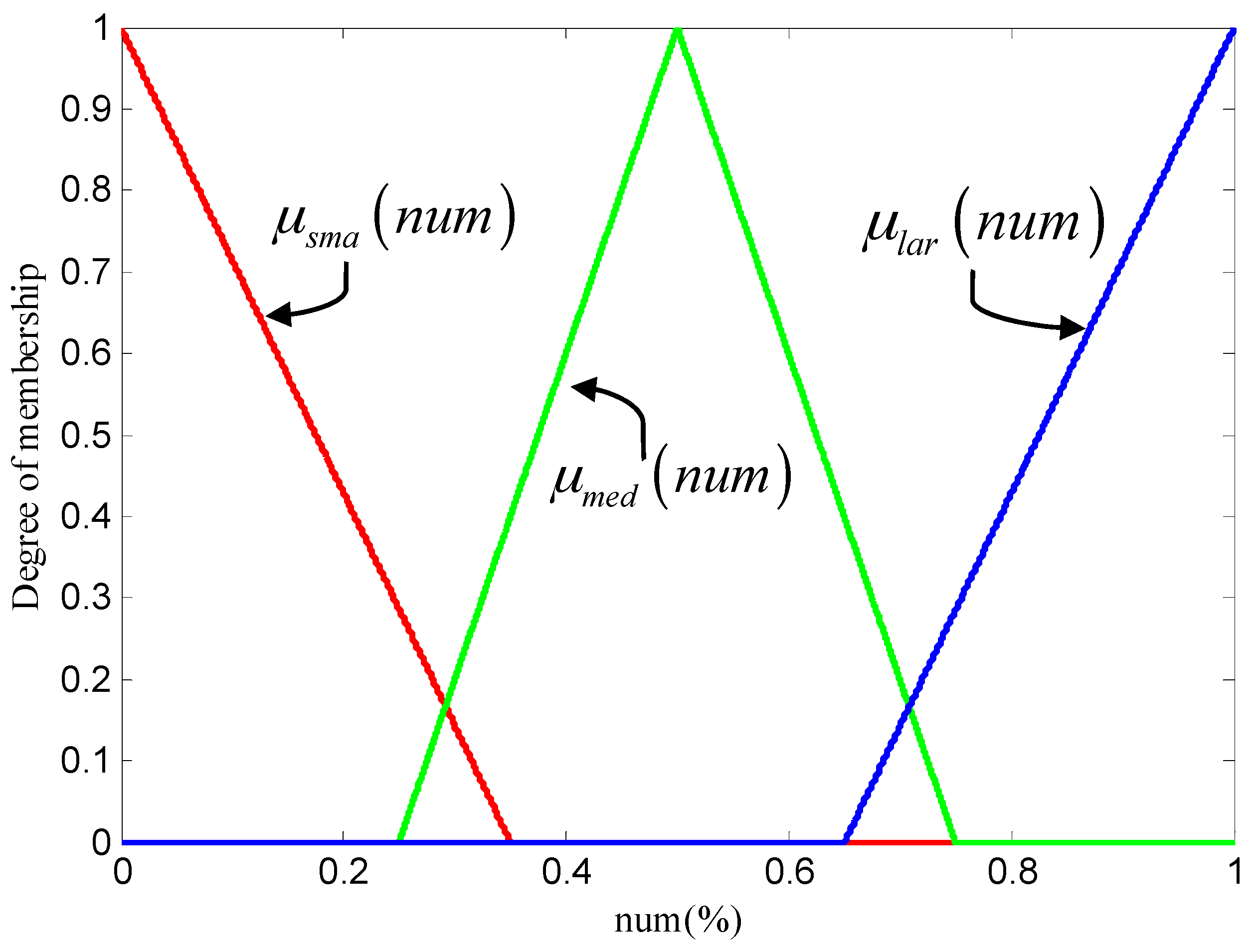
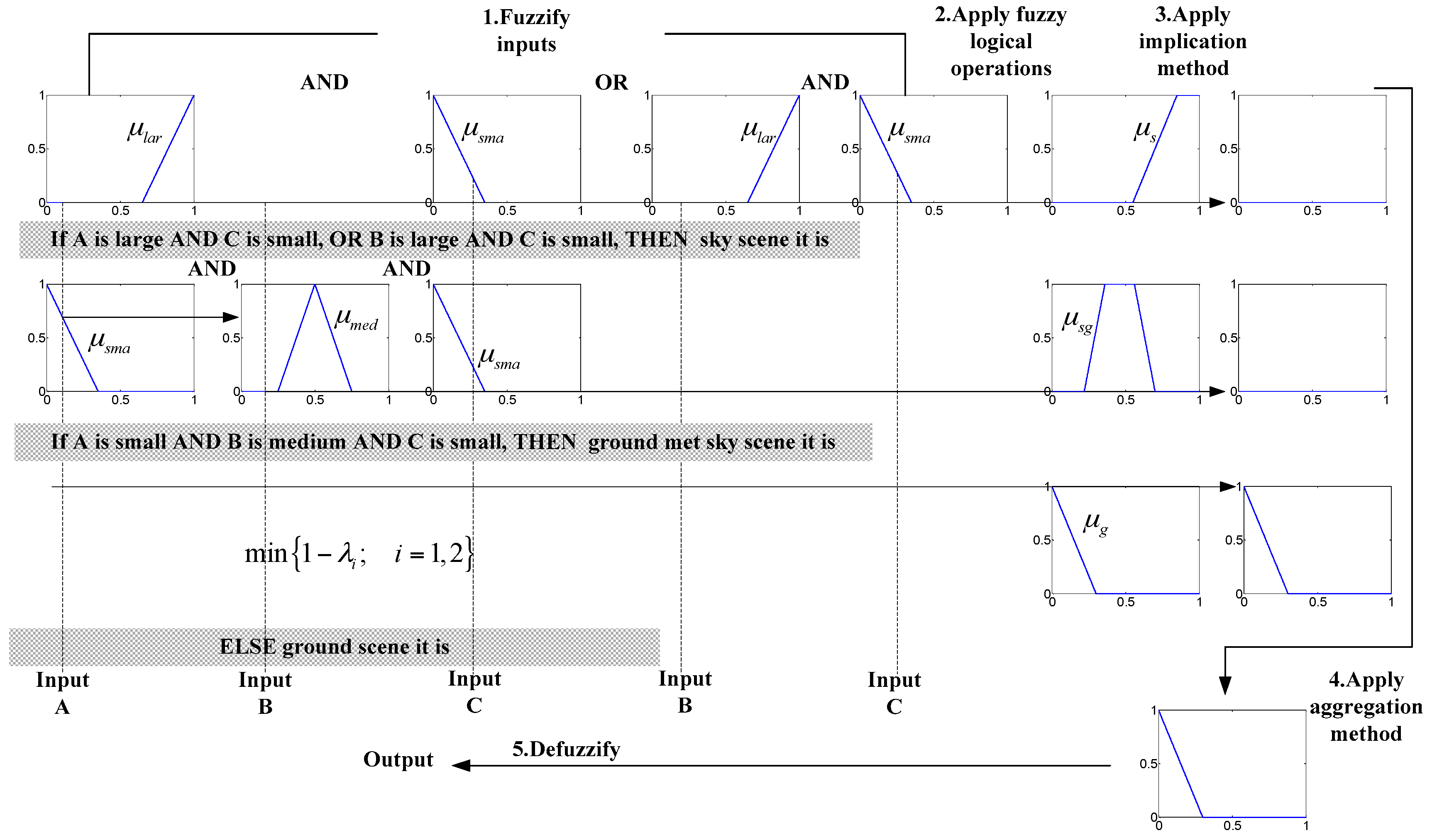
2.2. The Scene Classification
- Rule1:
- If A is large AND C is small, OR B is large AND C is small, THEN it is a sky image.
- Rule2:
- If A is small AND B is medium AND C is small, THEN it is a half sky image.
- Rule3:
- ELSE it is a ground image.
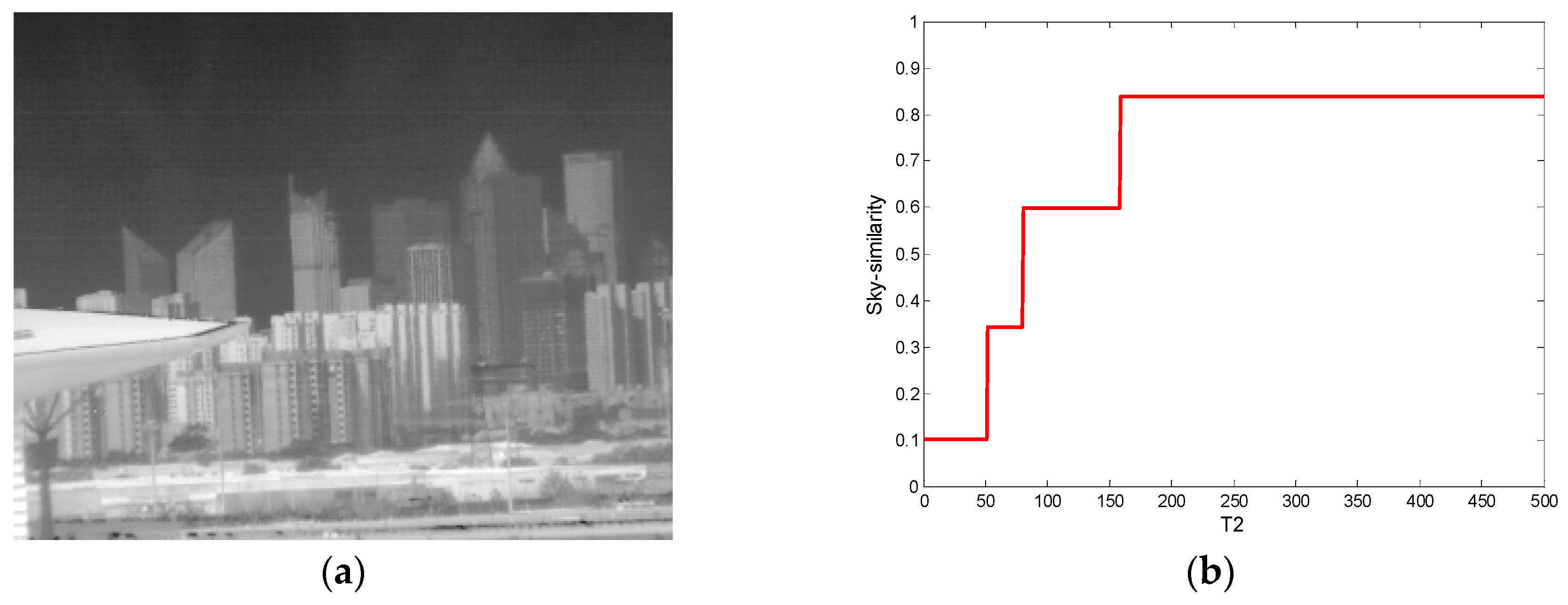
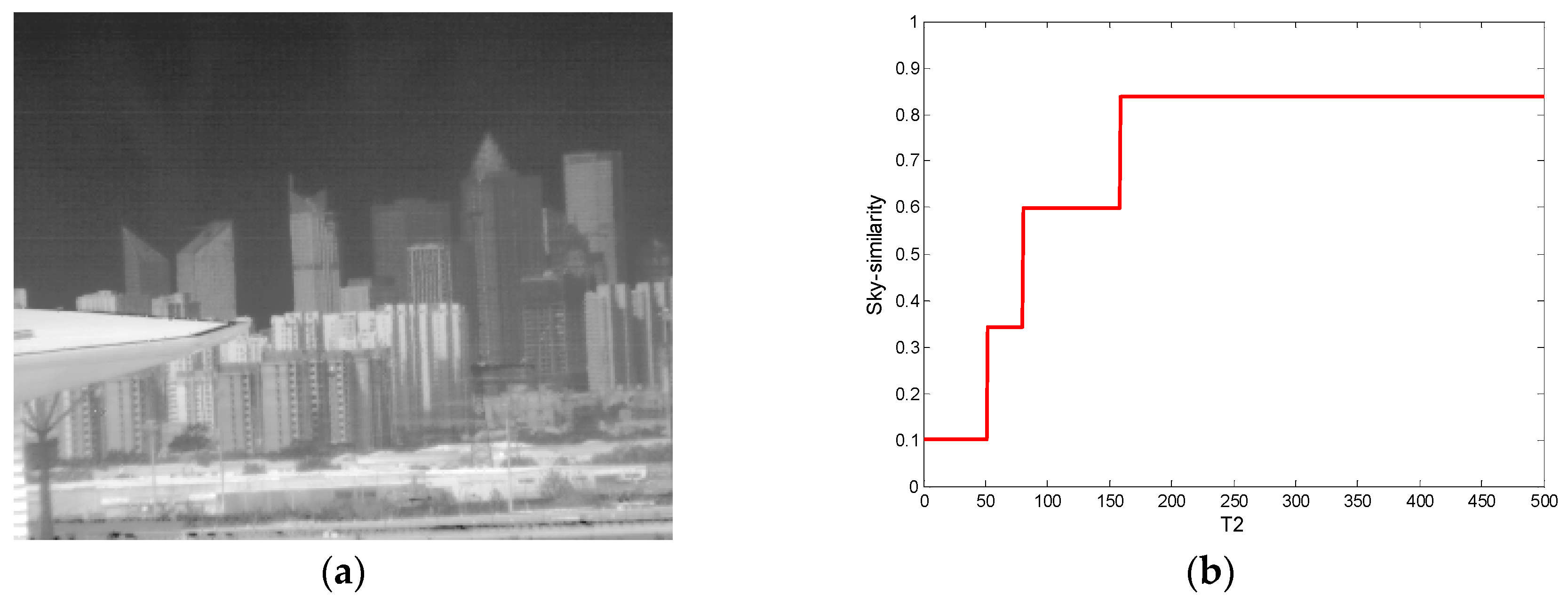
2.3. Adaptive Threshold
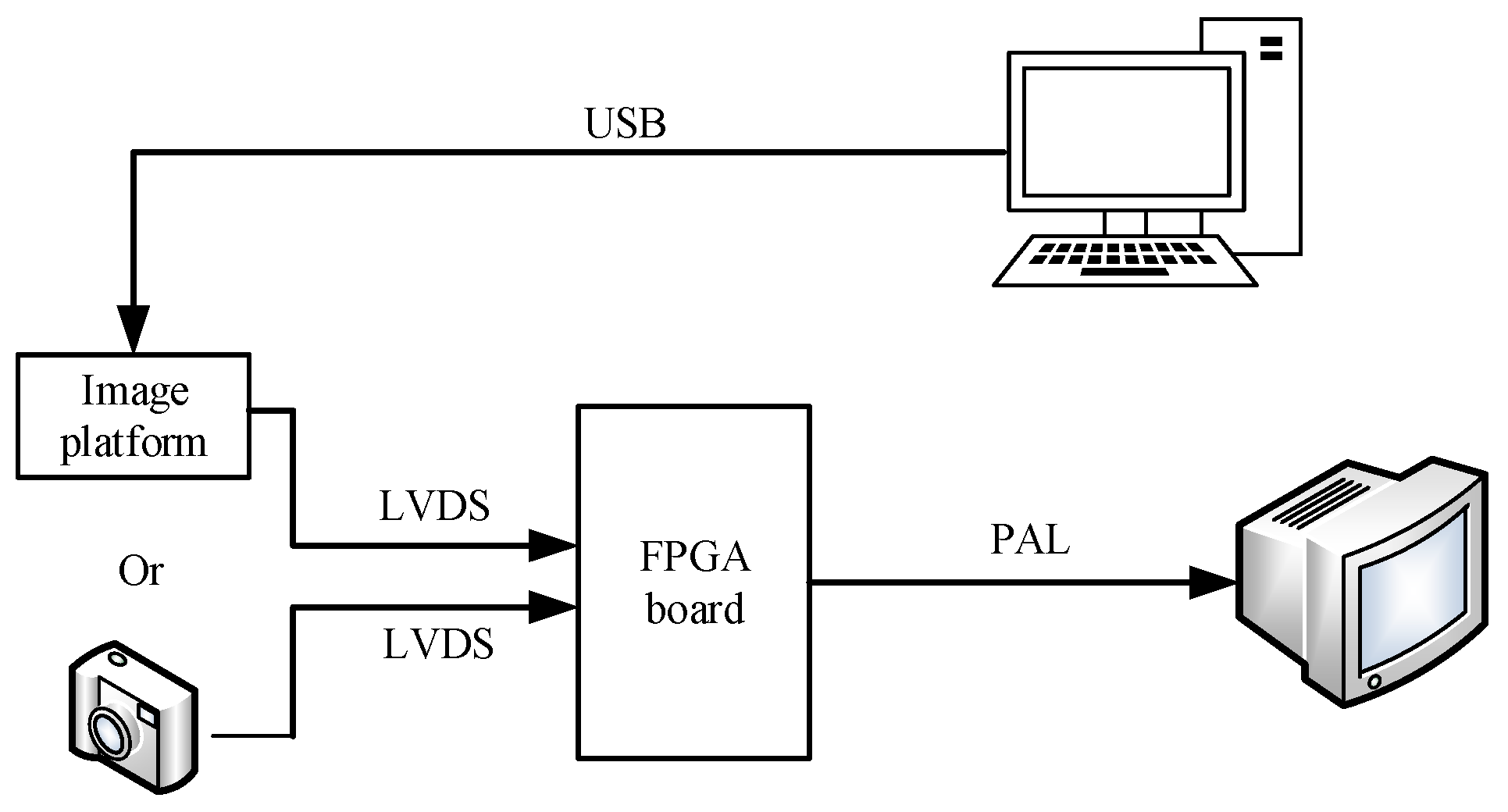
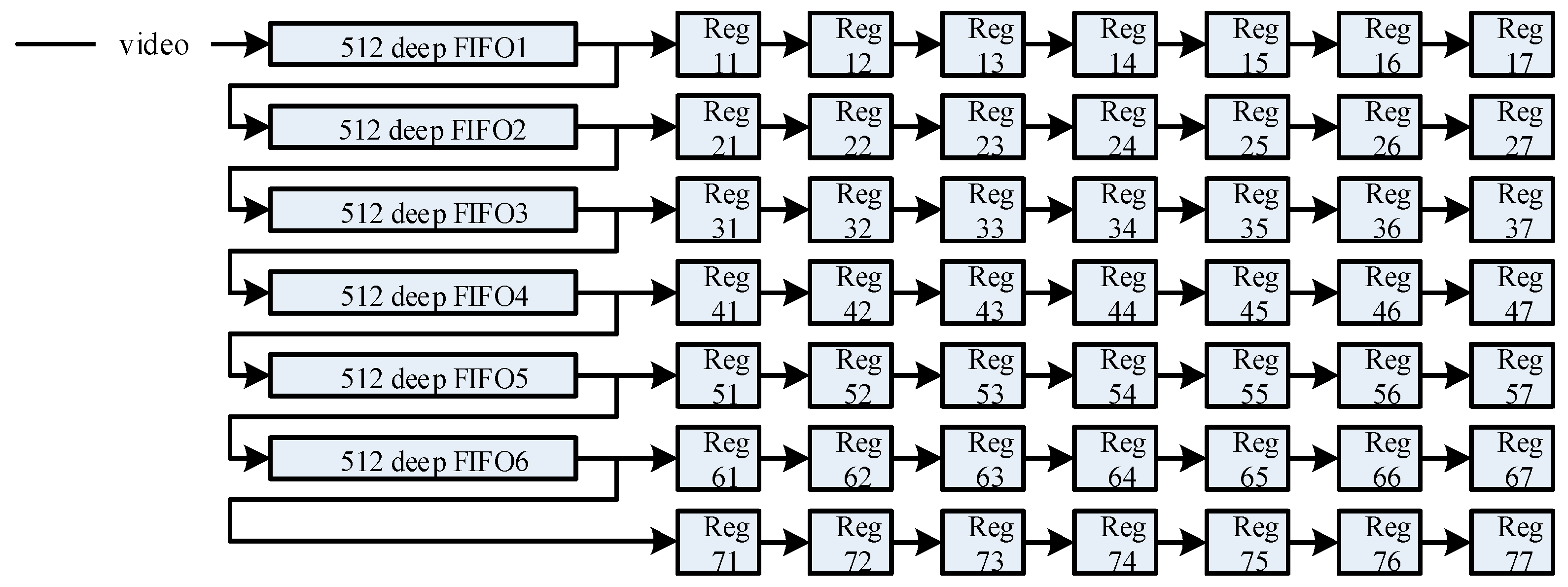
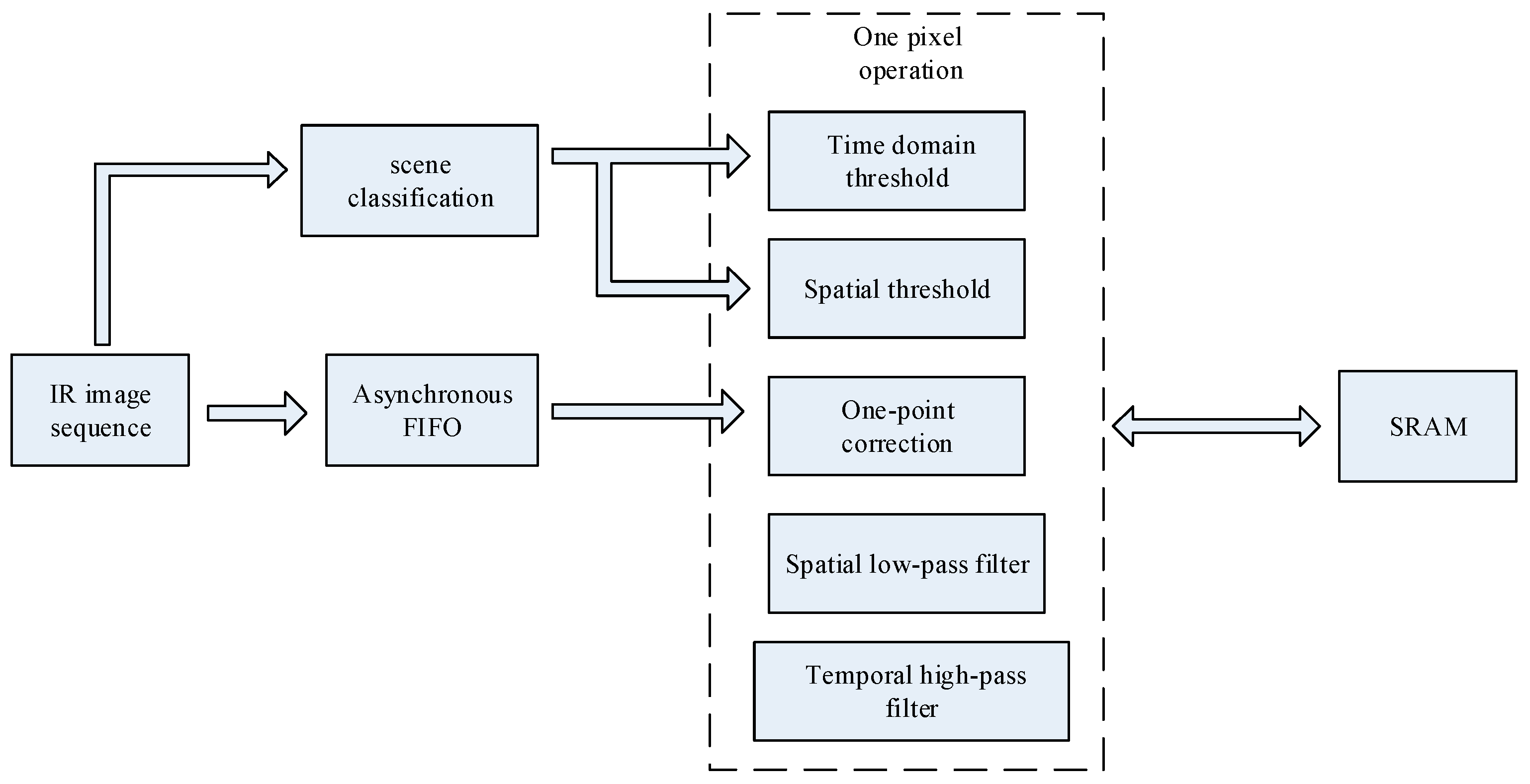
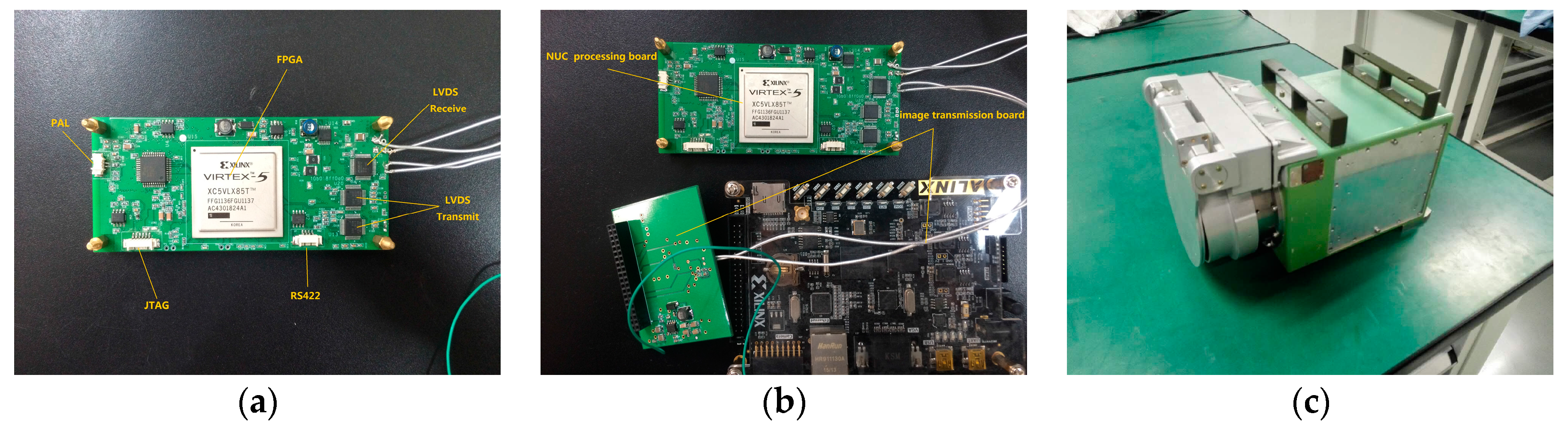
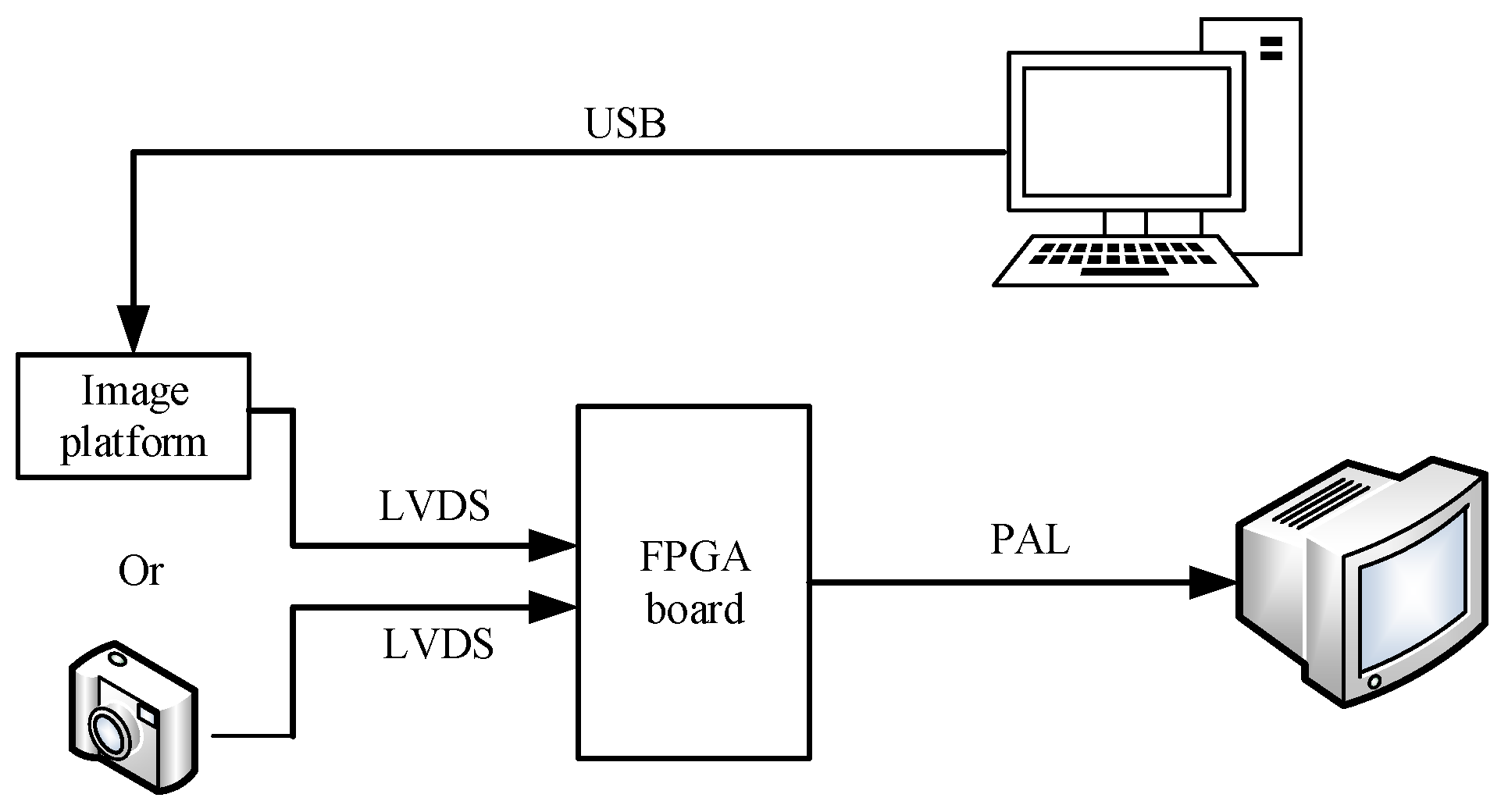
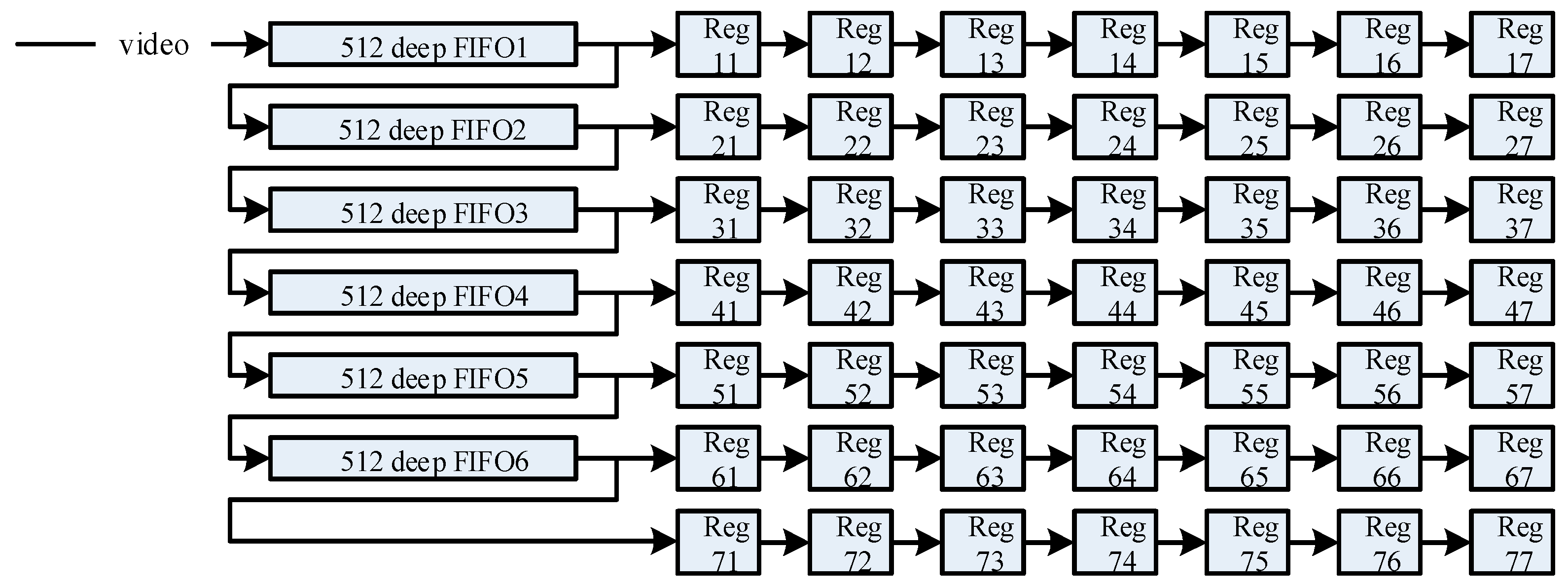
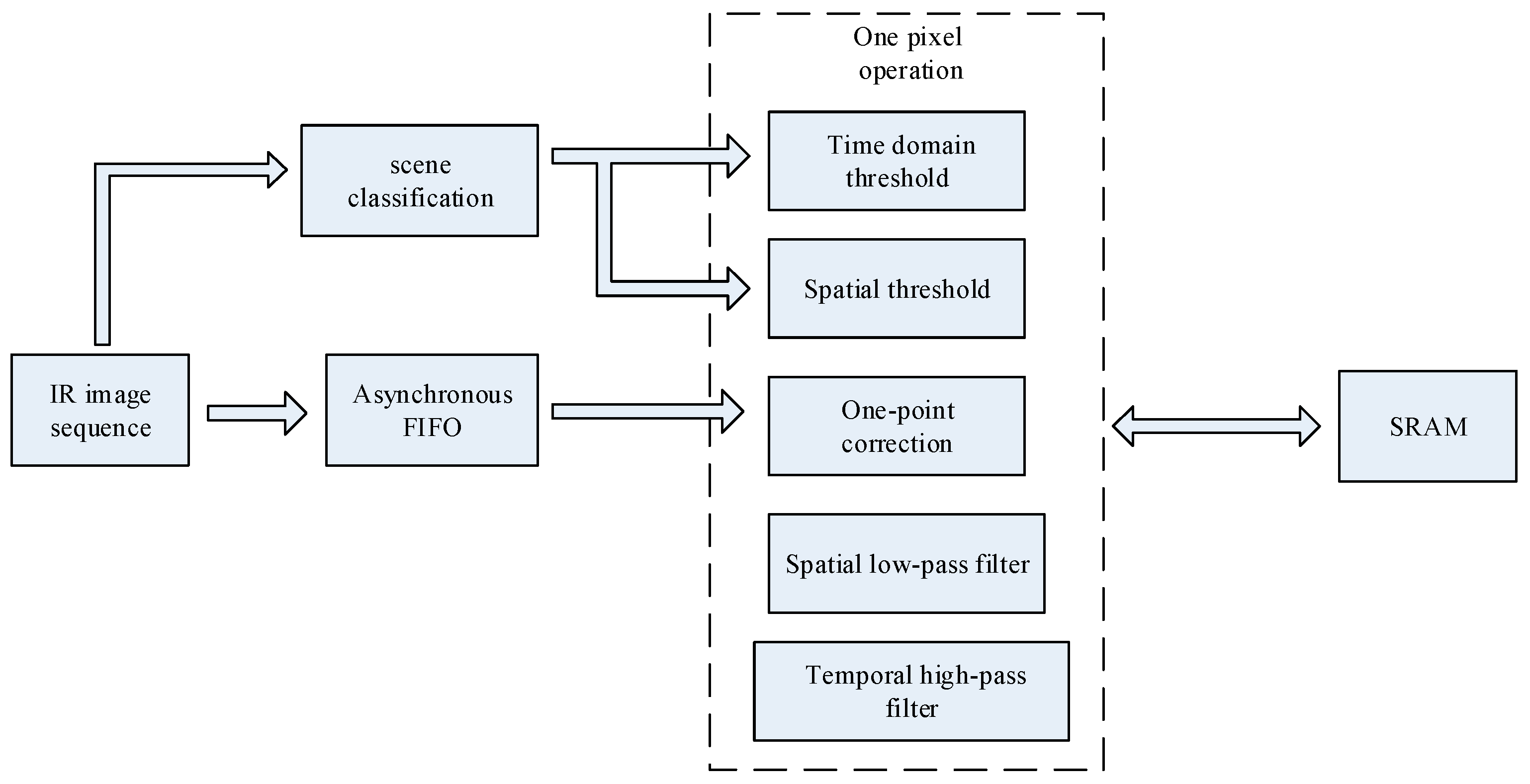
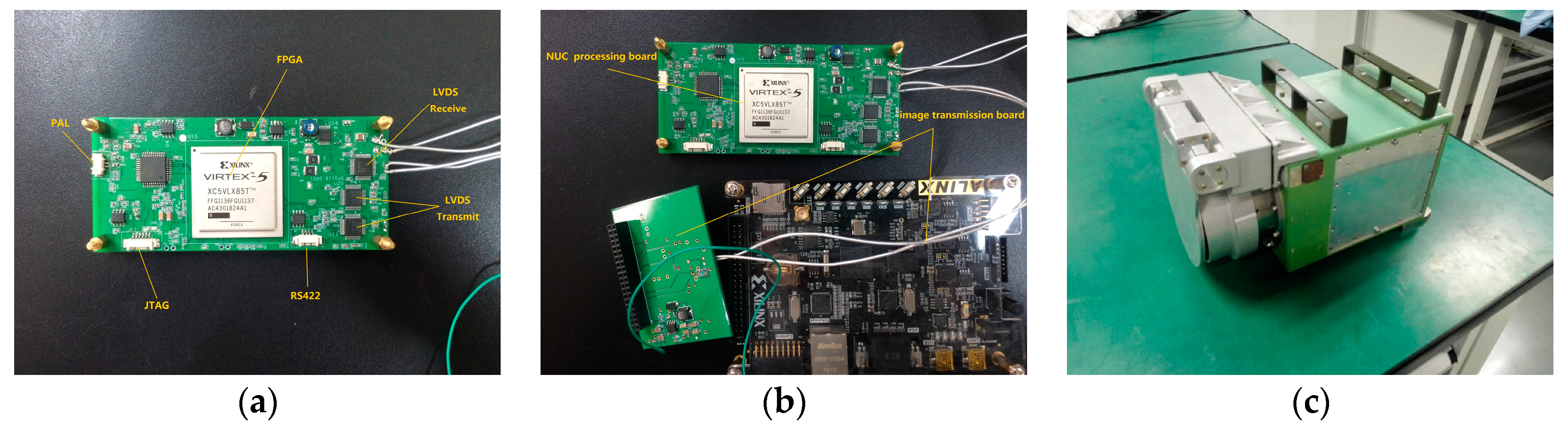
2.4. Hardware Implementation
3. Results
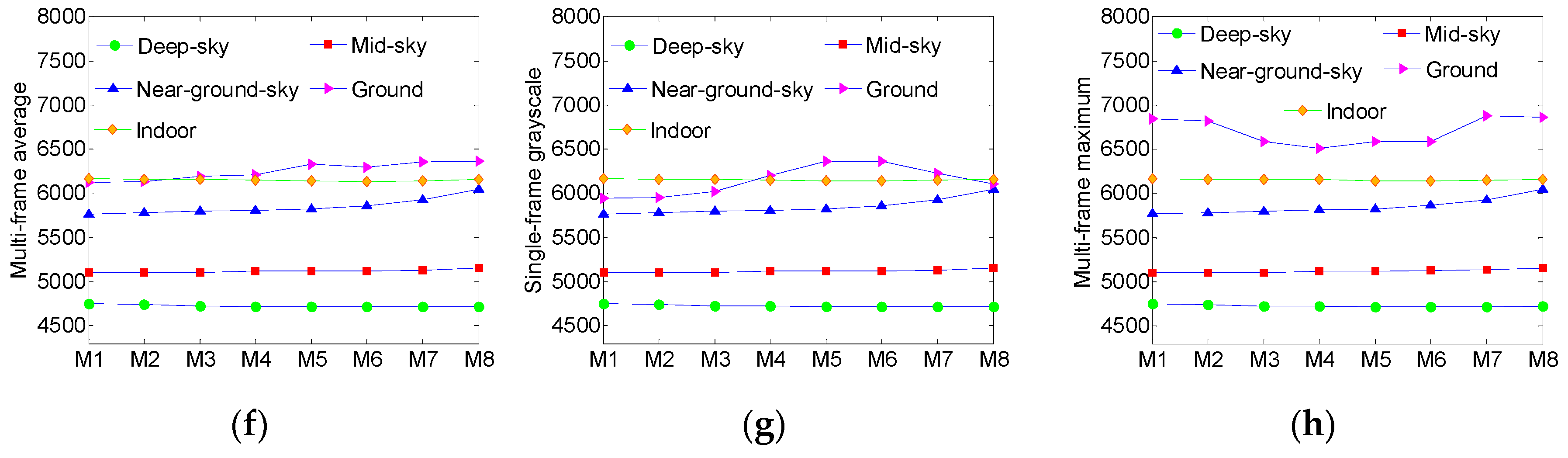
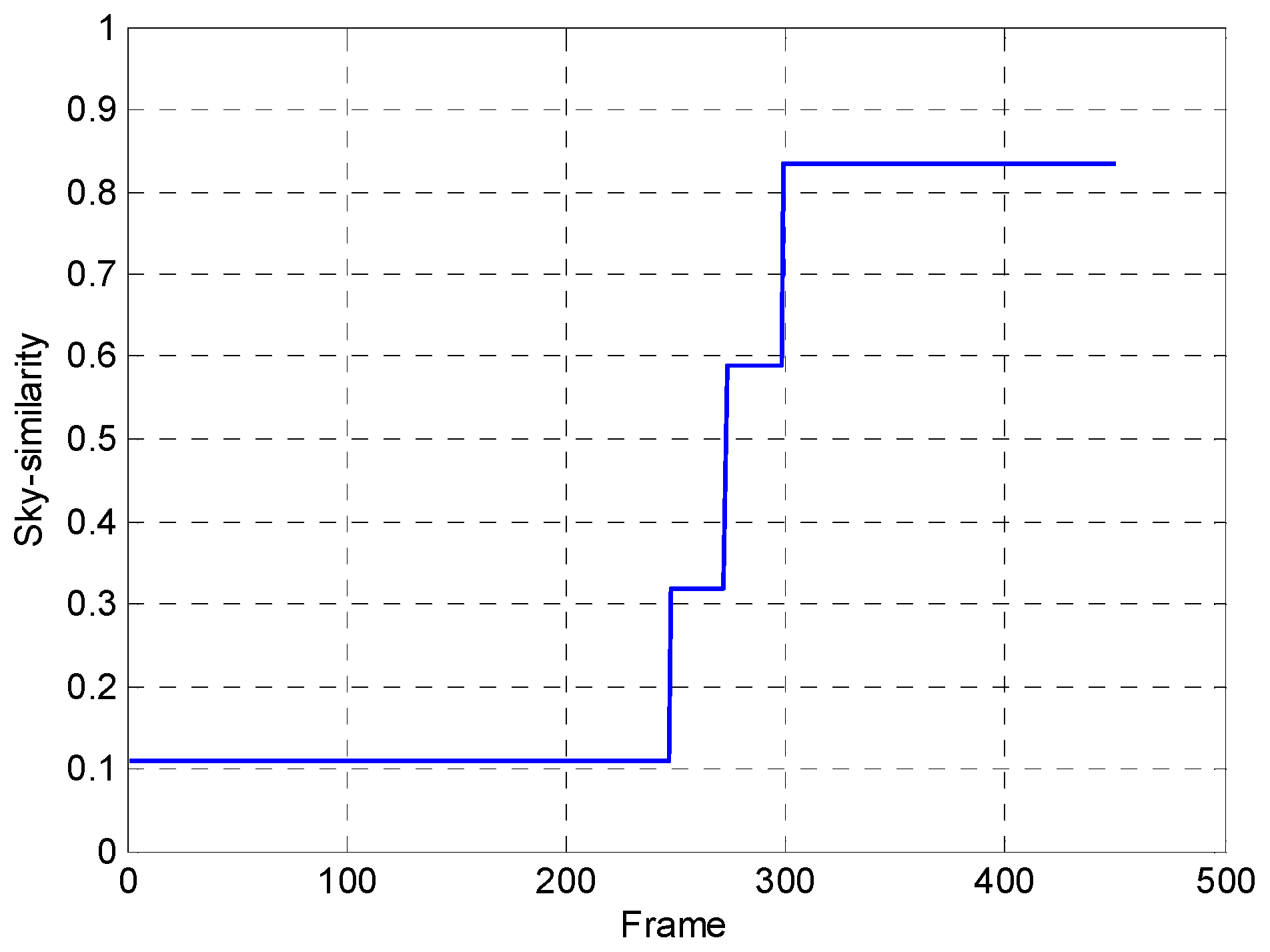
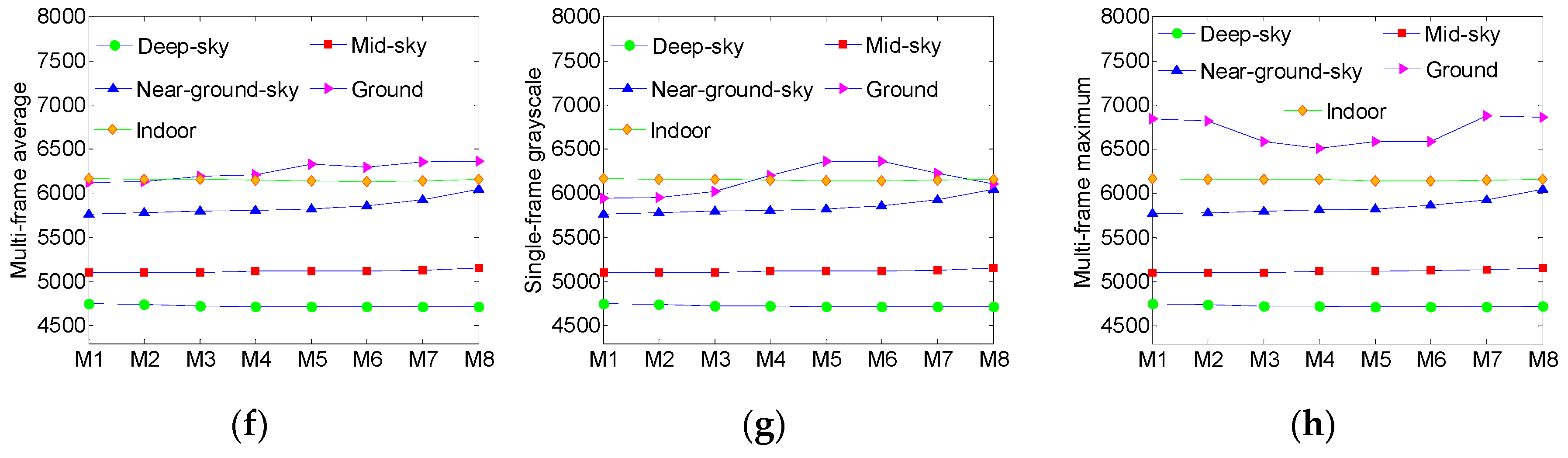
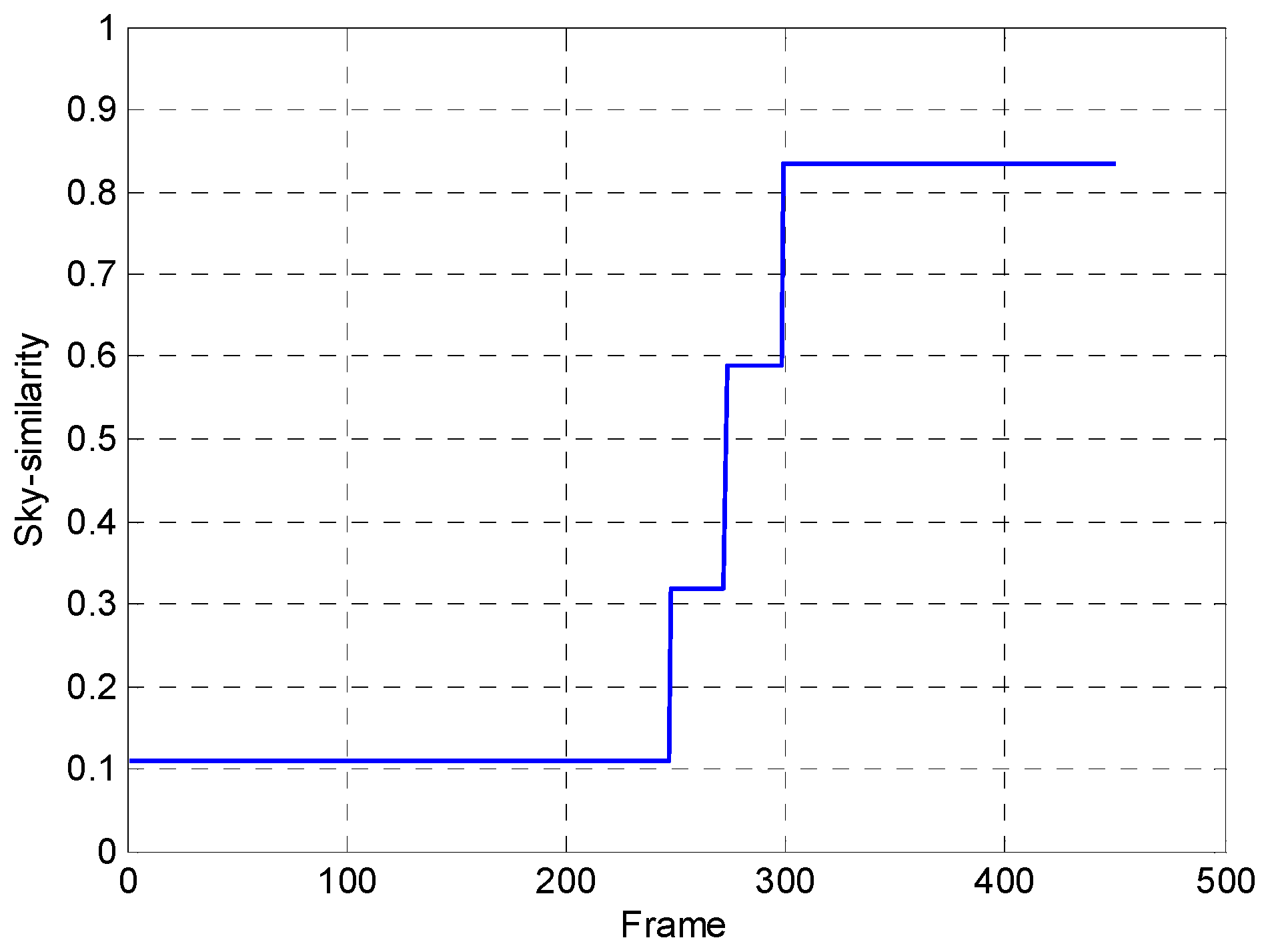
3.1. Scene Classification Experiment
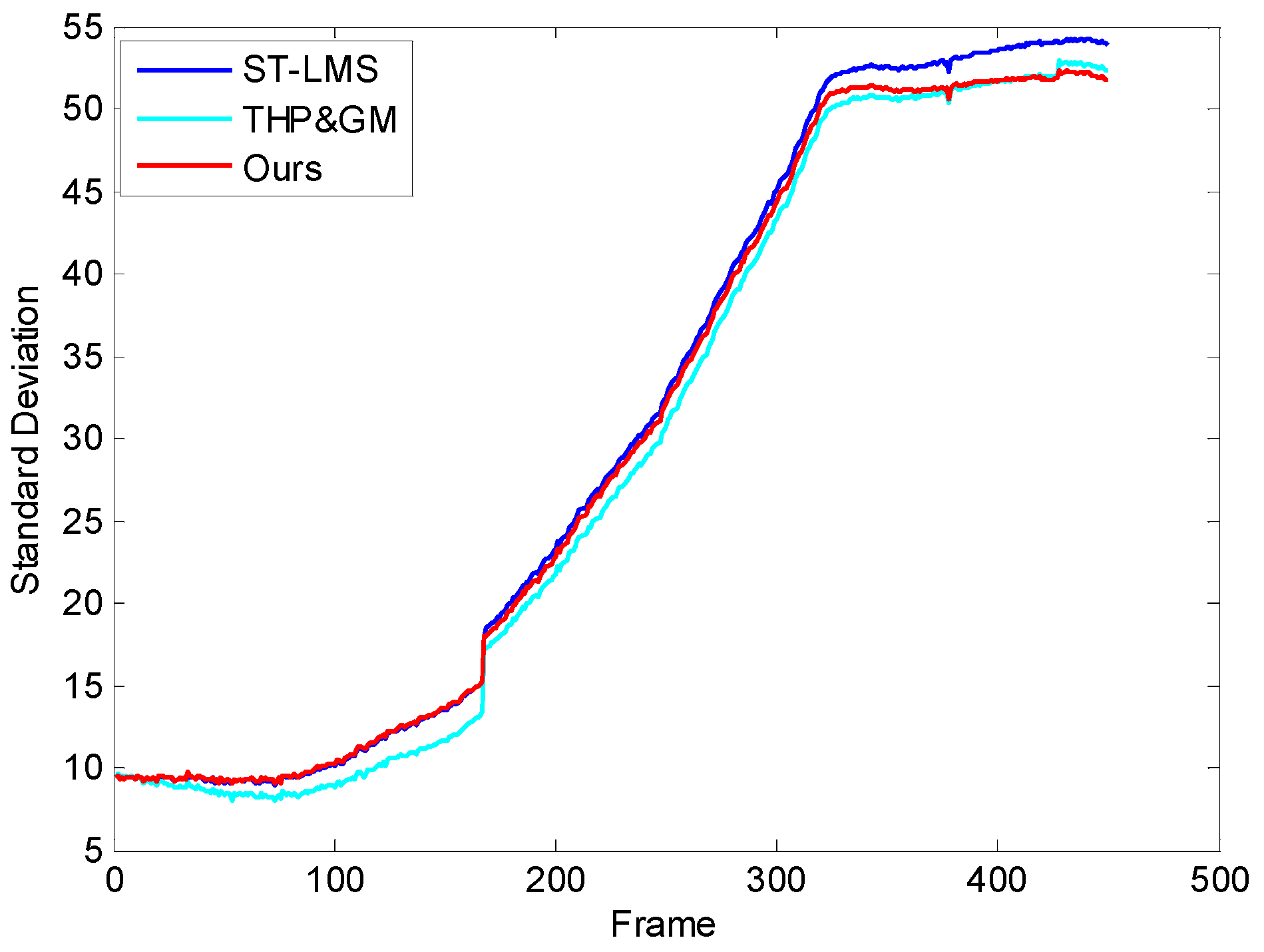
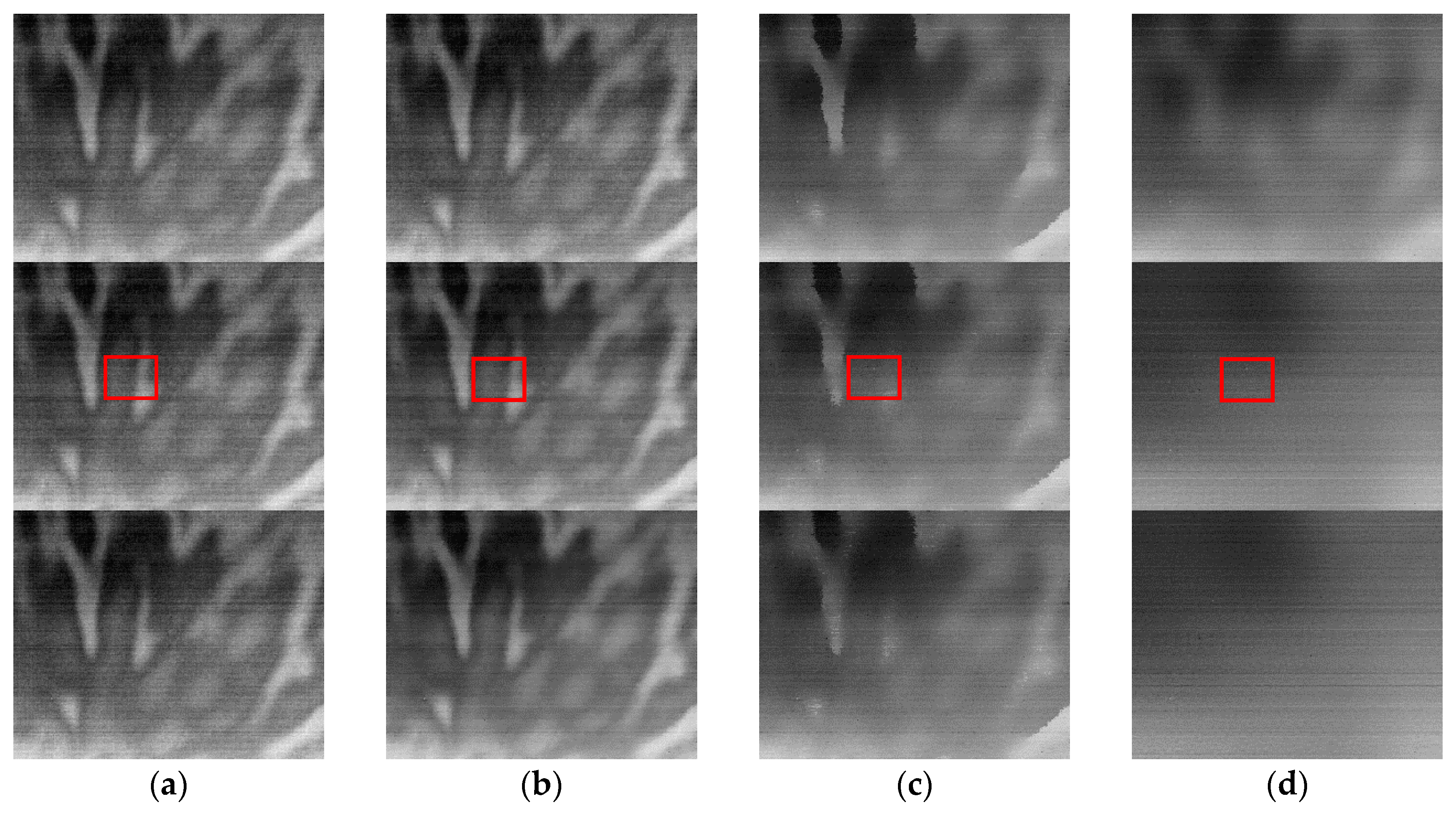
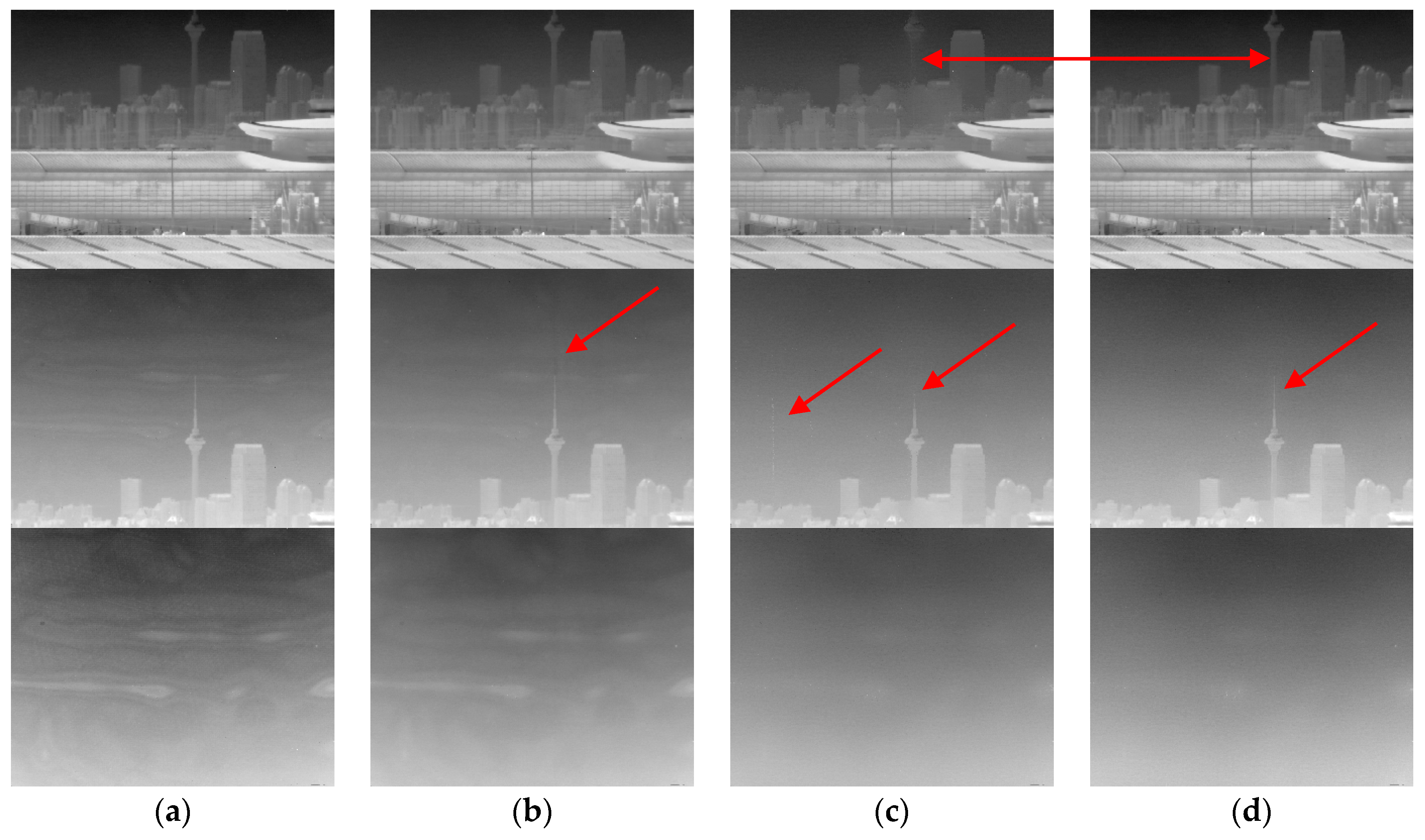
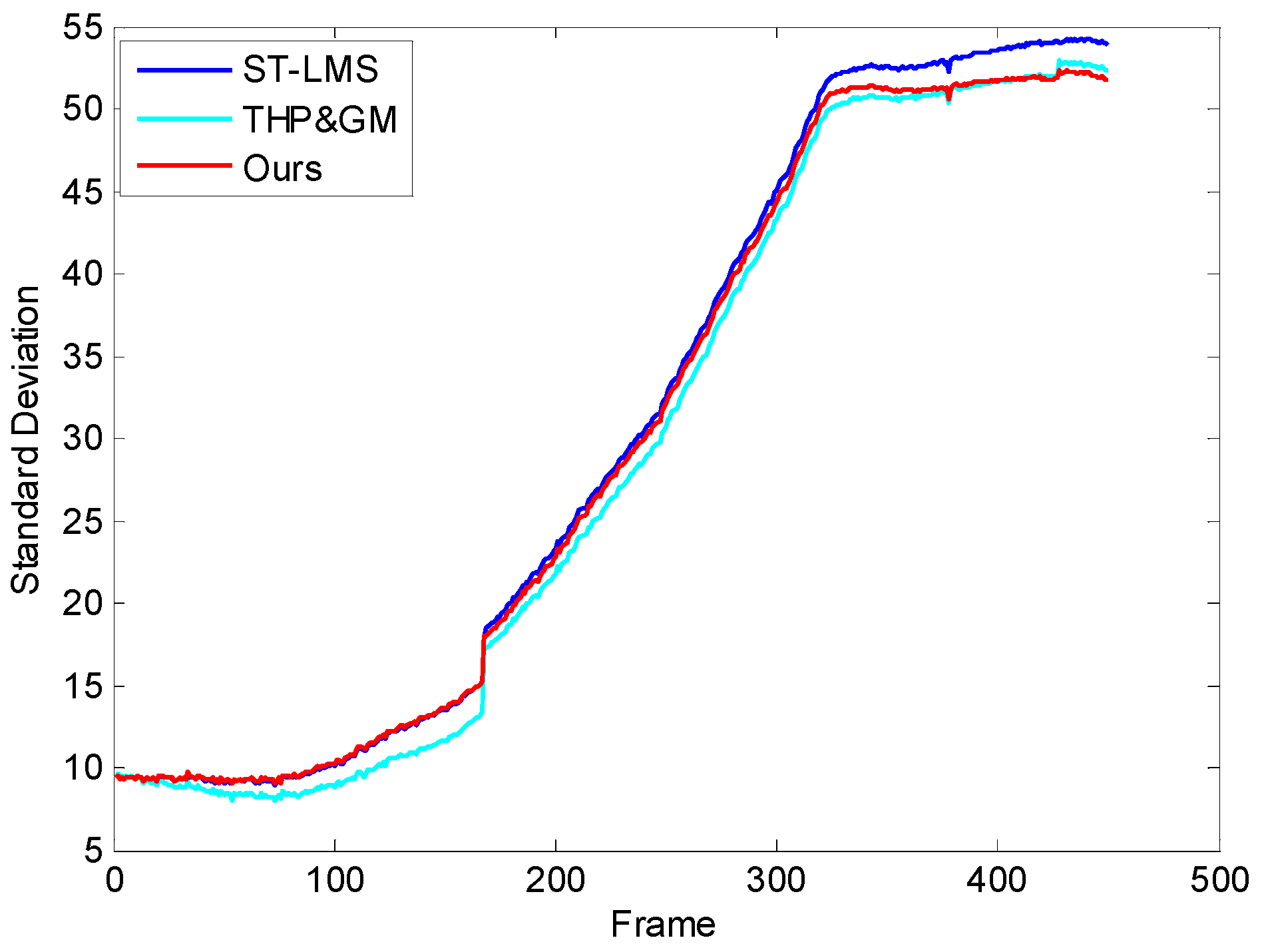
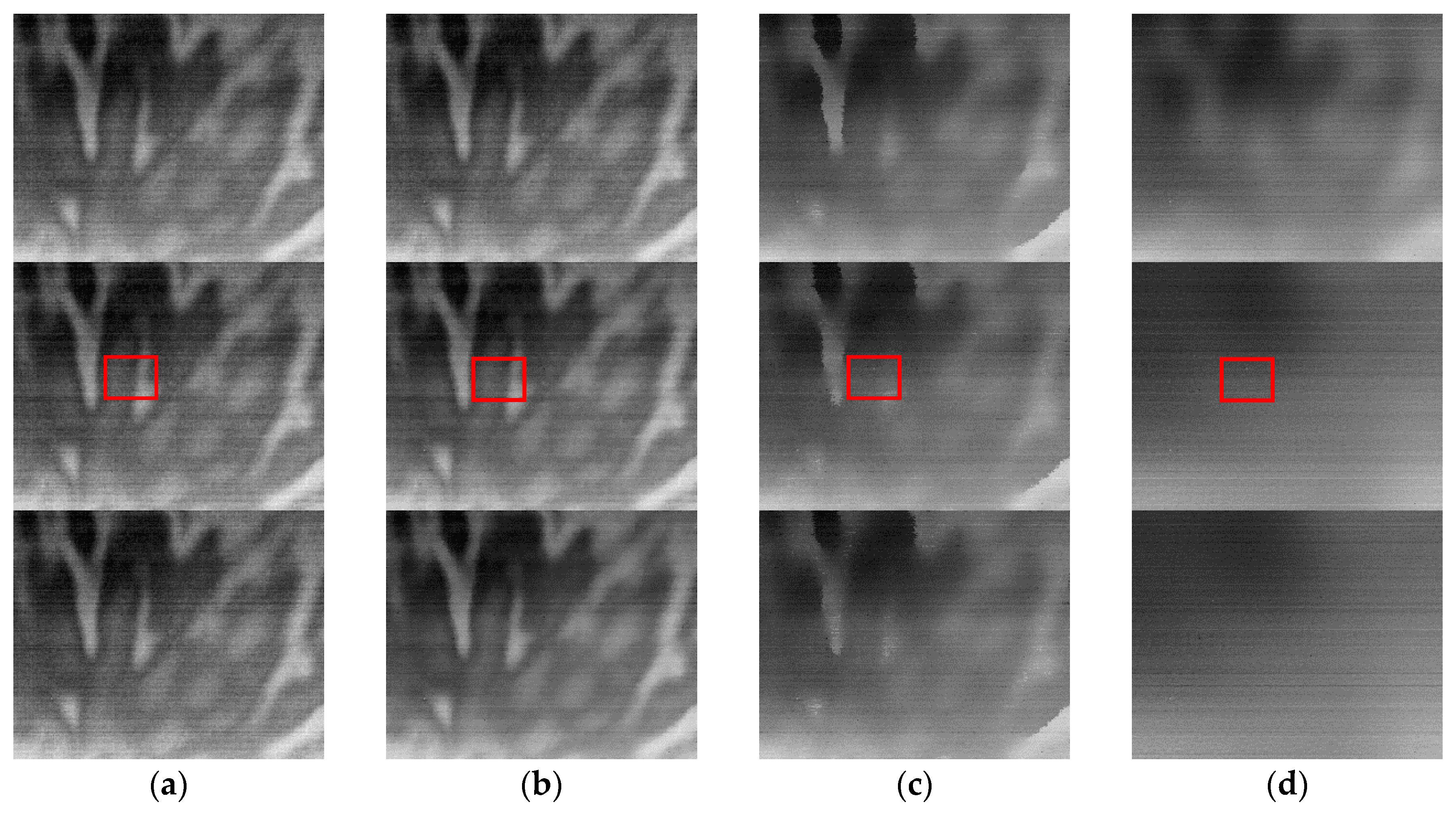
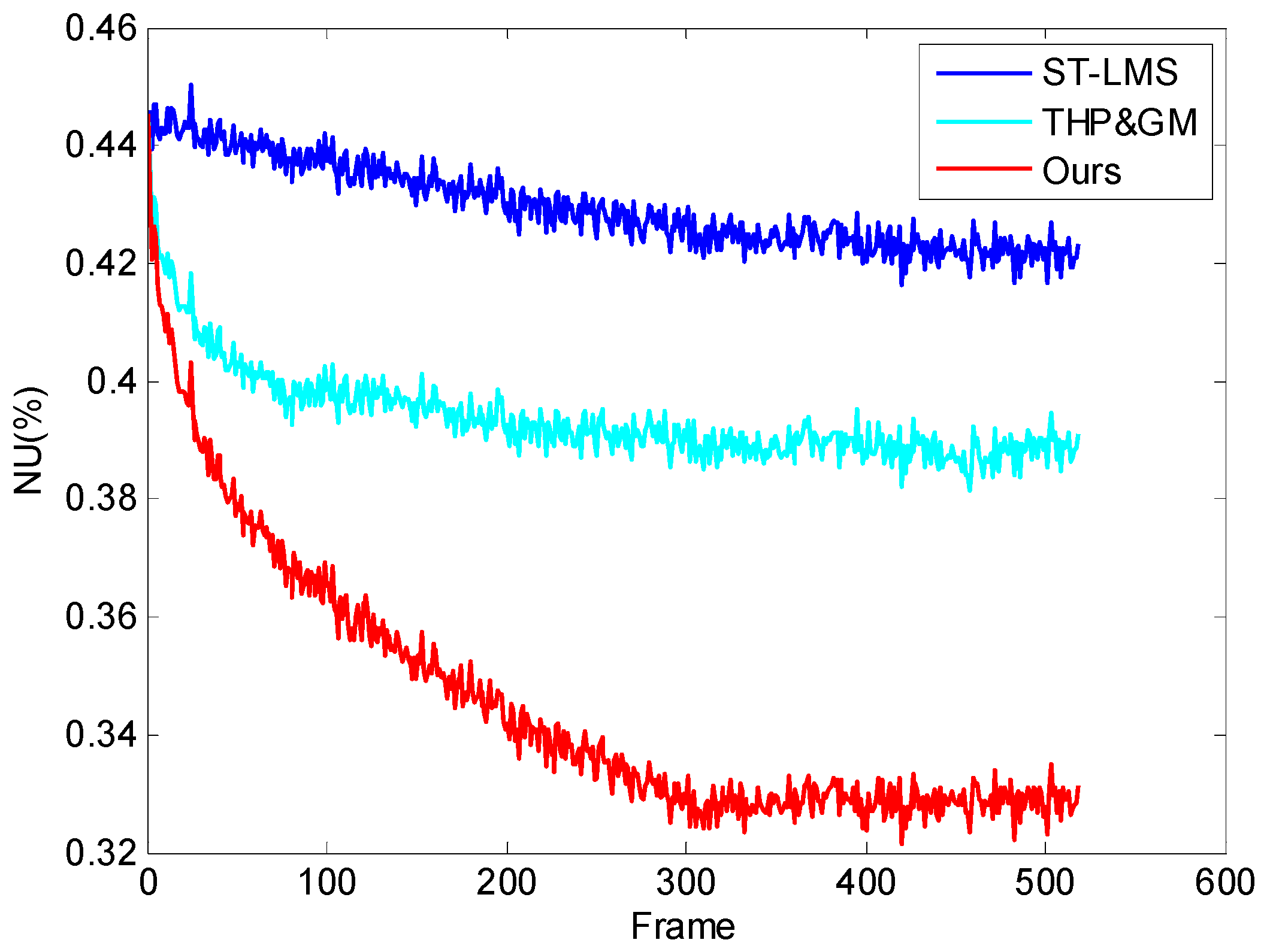
3.2. Nonuniformity Correction on Real Infrared Data
3.3. Real-Time Performance
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| RNU | Residual nonuniformity |
| FPGA | Field-programmable gate array |
| IRFPAs | Infrared focal plane arrays |
| FPN | Fixed pattern noise |
| NUC | Nonuniformity correction |
| CBNUC | Calibration-based nonuniformity correction |
| SBNUC | Scene-based nonuniformity correction |
| NN | Neural network |
| THP | Temporal high-pass |
| CS | Constant-statistical |
| THP & GM | Temporal high-pass nonuniformity correction algorithm based on grayscale mapping |
| ITHP & GM | Improved THP & GM |
| LVDS | Low-Voltage Differential Signaling |
| PAL | Phase Alteration Line |
| FIFO | First In First Out |
| SRAM | Static Random Access Memory |
| ST-LMS | Least mean square based nonuniformity correction algorithm combined temporal and spatial information |
| SD | Standard deviation |
| NU | Nonuniformity |
References
- Ji, J.K.; Yoon, J.R.; Cho, K. Nonuniformity correction scheme for an infrared camera including the background effect due to camera temperature variation. Opt. Eng. 2000, 39, 936–940. [Google Scholar] [CrossRef]
- Friedenberg, A.; Goldblatt, I. Nonuniformity two-point linear correction errors in infrared focal plane arrays. Opt. Eng. 1998, 37, 1251–1253. [Google Scholar] [CrossRef]
- Perry, D.L.; Dereniak, E.L. Linear theory of nonuniformity correction in infrared staring sensors. Opt. Eng. 1993, 32, 1854–1859. [Google Scholar] [CrossRef]
- Hardie, R.C.; Hayat, M.M.; Armstrong, E.; Yasuda, B. Scene-based nonuniformity correction with video sequences and registration. Appl. Opt. 2000, 39, 1241–1250. [Google Scholar] [CrossRef] [PubMed]
- Boutemedjet, A.; Deng, C.; Zhao, B. Robust Approach for Nonuniformity Correction in Infrared Focal Plane Array. Sensors 2016, 16, 1890. [Google Scholar] [CrossRef] [PubMed]
- Scribner, D.; Sarkady, K.; Kruer, M.; Caulfield, J.; Hunt, J.; Colbert, M.; Descour, M. Adaptive retina-like preprocessing for imaging detector arrays. In Proceedings of the IEEE International Conference on Neural Networks, San Francisco, CA, USA, 28 March–1 April 1993; pp. 1955–1960. [Google Scholar]
- Harris, J.G. Nonuniformity correction of infrared image sequences using the constant-statistics constraint. IEEE Trans. Image Process. 1999, 8, 1148–1151. [Google Scholar] [CrossRef] [PubMed]
- Vera, E.; Torres, S. Fast adaptive nonuniformity correction for infrared focal-plane array detectors. Eurasip J. Appl. Signal Process. 2005, 2005, 1994–2004. [Google Scholar] [CrossRef]
- Hardie, R.C.; Baxley, F.; Brys, B.; Hytla, P. Scene-based nonuniformity correction with reduced ghosting using a gated LMS algorithm. Opt. Express. 2009, 17, 14918–14933. [Google Scholar] [CrossRef] [PubMed]
- Fan, F.; Ma, Y.; Huang, J.; Liu, Z.; Liu, C. A combined temporal and spatial deghosting technique in scene based nonuniformity correction. Infrared Phys. Technol. 2015, 71, 408–415. [Google Scholar] [CrossRef]
- Qian, W.; Chen, Q.; Gu, G. Space low-pass and temporal high-pass nonuniformity correction algorithm. Opt. Rev. 2010, 17, 24–29. [Google Scholar] [CrossRef]
- Harris, J.G.; Chiang, Y.M. Minimizing the ghosting artifact in scene-based nonuniformity correction. In Proceedings of the SPIE Conference on Infrared Imaging Systems: Design Analysis, Modeling, and Testing IX, Orlando, FL, USA, 1998; pp. 106–113. [Google Scholar]
- Jin, M.; Jin, W.; Li, Y.; Li, S. Temporal high-pass nonuniformity correction algorithm based on grayscale mapping and hardware implementation. In Proceedings of the International Conference on Optical Instruments and Technology 2015, Beijing, China, 17–19 May 2015. [Google Scholar]
- Toczek, T.; Hamdi, F.; Heyrman, B.; Dubois, J.; Miteran, J.; Ginhac, D. Scene-based nonuniformity correction: From algorithm to implementation on a smart camera. J. Syst. Archit. 2013, 59, 833–846. [Google Scholar] [CrossRef]
- Celedon, N.; Redlich, R.; Figueroa, M. FPGA-based Neural Network for Nonuniformity Correction on Infrared Focal Plane Arrays. In Proceedings of the Euromicro Conference on Digital System Design, Lzmir, Turkey, 5–8 September 2012; pp. 193–200. [Google Scholar]
- Redlich, R.; Figueroa, M.; Torres, S.N.; Pezoa, J.E. Embedded nonuniformity correction in infrared focal plane arrays using the Constant Range algorithm. Infrared Phys. Technol. 2015, 69, 164–173. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, D.; Shao, M. Study on the infrared radiation characteristics of the sky background. In Proceedings of the Applied Optics and Photonics China (AOPC2015), Beijing, China, 5–7 May 2015. [Google Scholar]
- Lashansky, S.N.; Ben-Yosef, N.; Weitz, A.; Agassi, E. Preprocessing of ground-based infrared sky images to obtain the true statistical behavior of the image. Opt. Eng. 1991, 30, 1892–1896. [Google Scholar] [CrossRef]
- Lashansky, S.N.; Ben-Yosef, N.; Weitz, A. Segmentation and statistical analysis of ground-based infrared cloudy sky images. Opt. Eng. 1992, 31, 1057–1063. [Google Scholar] [CrossRef]
- Wang, L.-X. Stable adaptive fuzzy control of nonlinear systems. IEEE Trans. Fuzzy Syst. 1993, 1, 146–155. [Google Scholar] [CrossRef]
- Jin, W.; Gong, F.; Zeng, X.; Fu, R. Classification of Clouds in Satellite Imagery Using Adaptive Fuzzy Sparse Representation. Sensors 2016, 16, 2153. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Publishing House of Electronics Industry: Beijing, China, 2010; pp. 195–206. [Google Scholar]
- Kumar, A.; Sarkar, S.; Agarwal, R.P. A novel algorithm and FPGA based adaptable architecture for correcting sensor non-uniformities in infrared system. MICPRO 2007, 31, 402–407. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, T. Optics Temperature-Dependent Nonuniformity Correction Via l0-Regularized Prior for Airborne Infrared Imaging Systems. IEEE Photonics J. 2016, 8, 1–10. [Google Scholar]
- GB/T 17444-1998. The Technical Norms for Measurement and Test of Characteristic Parameters of Infrared Focal Plane Arrays; Standards Press of China: Beijing, China, 1998. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene | Sky | Ground | Half Sky |
|---|---|---|---|
| Classification accuracy | 98.9% | 99.9% | 98.3% |
| Type | Slices | Slice Reg | LUTs | LUTRAM | BRAM/FIFO | DSP48E |
|---|---|---|---|---|---|---|
| Used | 1600 | 2000 | 4000 | 70 | 6 | 7 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Jin, W.; Li, S.; Zhang, X.; Zhu, J. A Method of Sky Ripple Residual Nonuniformity Reduction for a Cooled Infrared Imager and Hardware Implementation. Sensors 2017, 17, 1070. https://doi.org/10.3390/s17051070
Li Y, Jin W, Li S, Zhang X, Zhu J. A Method of Sky Ripple Residual Nonuniformity Reduction for a Cooled Infrared Imager and Hardware Implementation. Sensors. 2017; 17(5):1070. https://doi.org/10.3390/s17051070
Chicago/Turabian StyleLi, Yiyang, Weiqi Jin, Shuo Li, Xu Zhang, and Jin Zhu. 2017. "A Method of Sky Ripple Residual Nonuniformity Reduction for a Cooled Infrared Imager and Hardware Implementation" Sensors 17, no. 5: 1070. https://doi.org/10.3390/s17051070
APA StyleLi, Y., Jin, W., Li, S., Zhang, X., & Zhu, J. (2017). A Method of Sky Ripple Residual Nonuniformity Reduction for a Cooled Infrared Imager and Hardware Implementation. Sensors, 17(5), 1070. https://doi.org/10.3390/s17051070