Self-Coexistence among IEEE 802.22 Networks: Distributed Allocation of Power and Channel

 ,
,  , ,
, , 
Abstract
:1. Introduction
- We formulate the self-coexistence problem as a mixed-integer nonlinear optimization problem that maximizes the network data rate by allowing neighboring base stations to allocate opportunistic resources to SUs in a non-interfering manner.
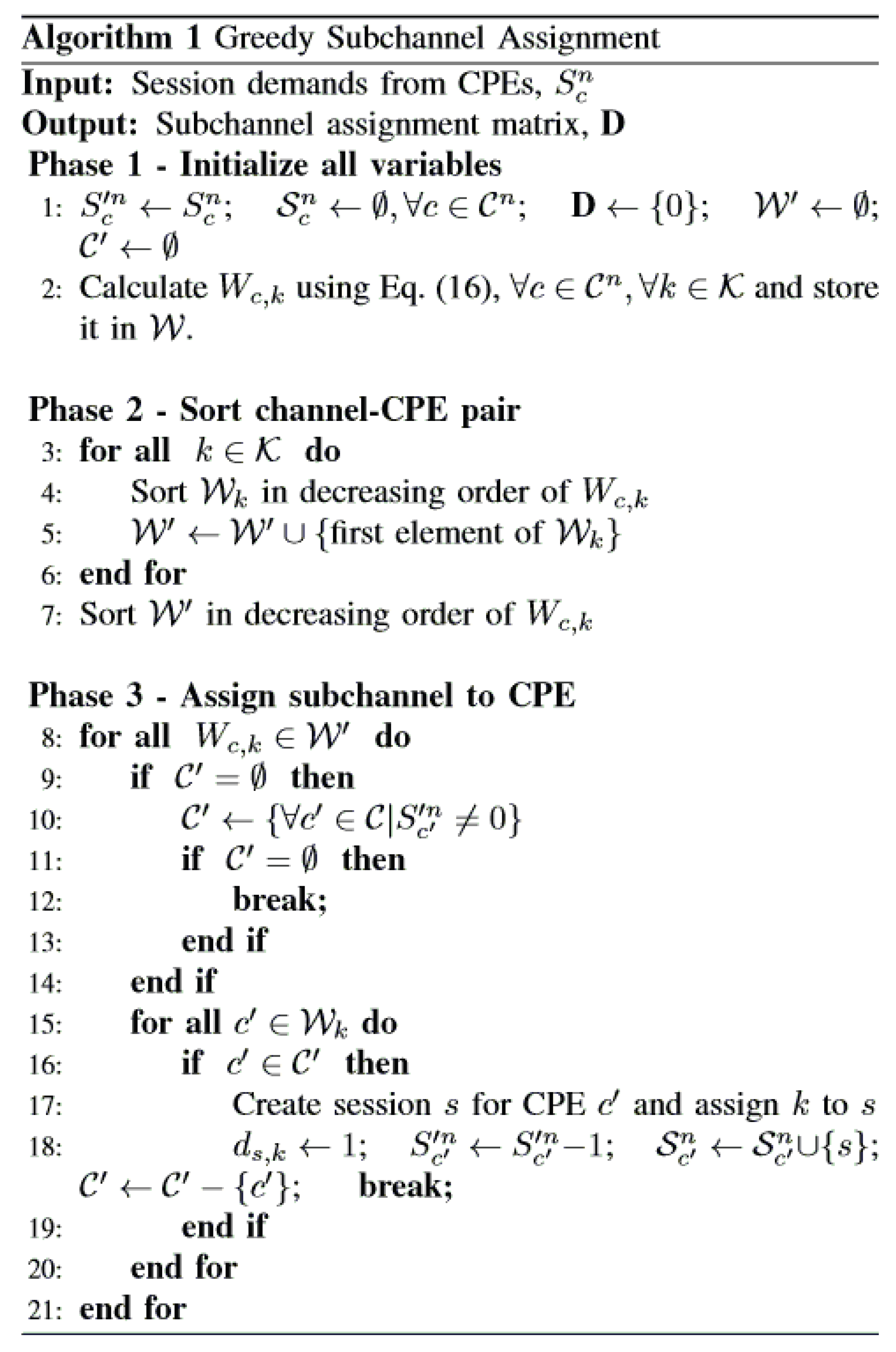
- Owing to the NP-hardness of the formulated problem, we decompose it into two subproblems to achieve near optimal solutions. We develop a greedy subchannel assignment algorithm considering channel gain and interference(s).
- We propose a game-theoretic model and utility function for power allocation in the BSs. Then, we derive the best response function for the BSs based on network data rate and power consumption.
- We provide a theoretical proof of the unique existence of the Nash equilibrium (NE) point and develop distributed algorithms that can guide each BS toward that point.
- The simulation results, experimented on ns-3 [17], show that the proposed resource allocation method outperforms state-of-the-art works in terms of data rate, fairness, convergence cost and power usage.
2. Related Works
3. Problem Definition
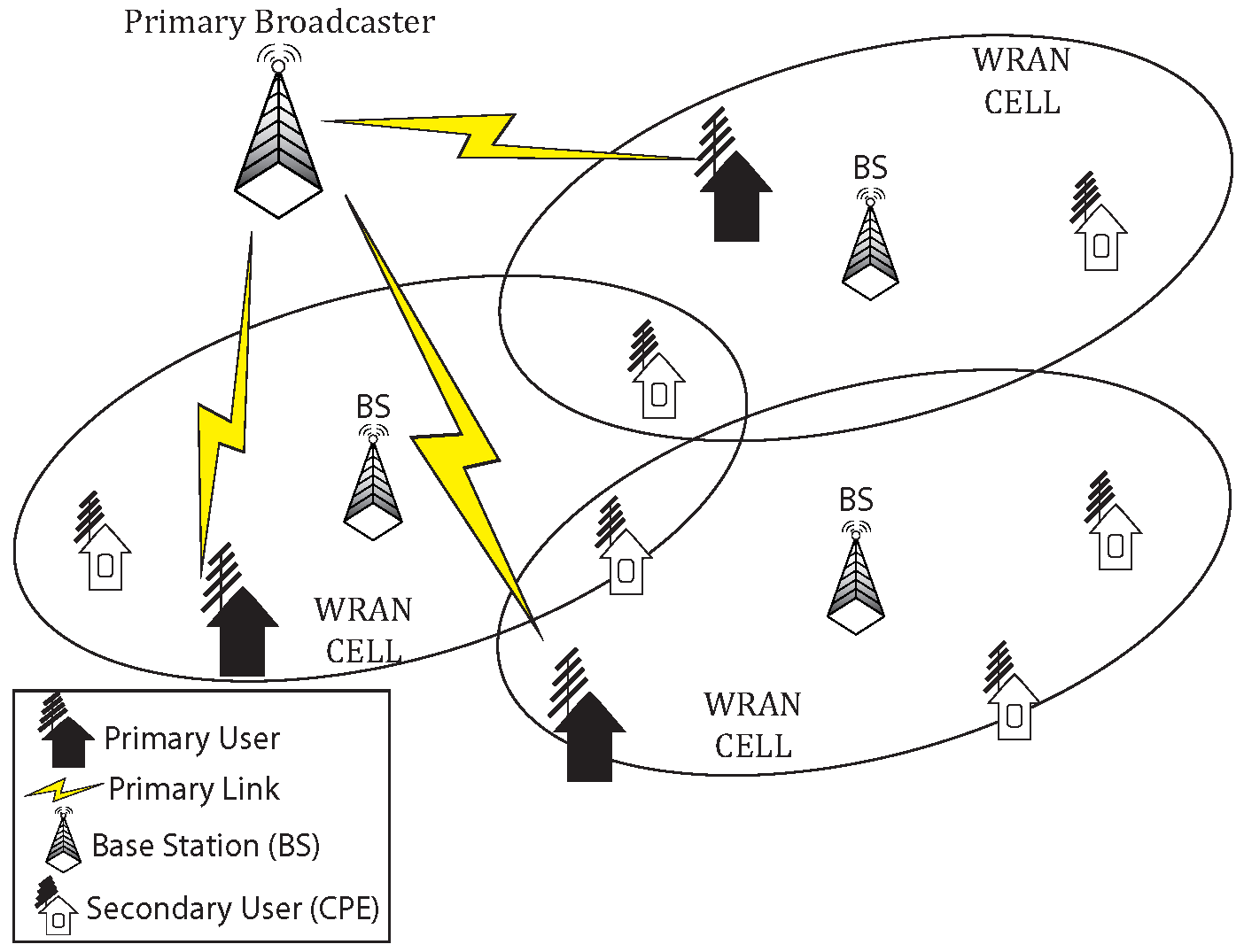
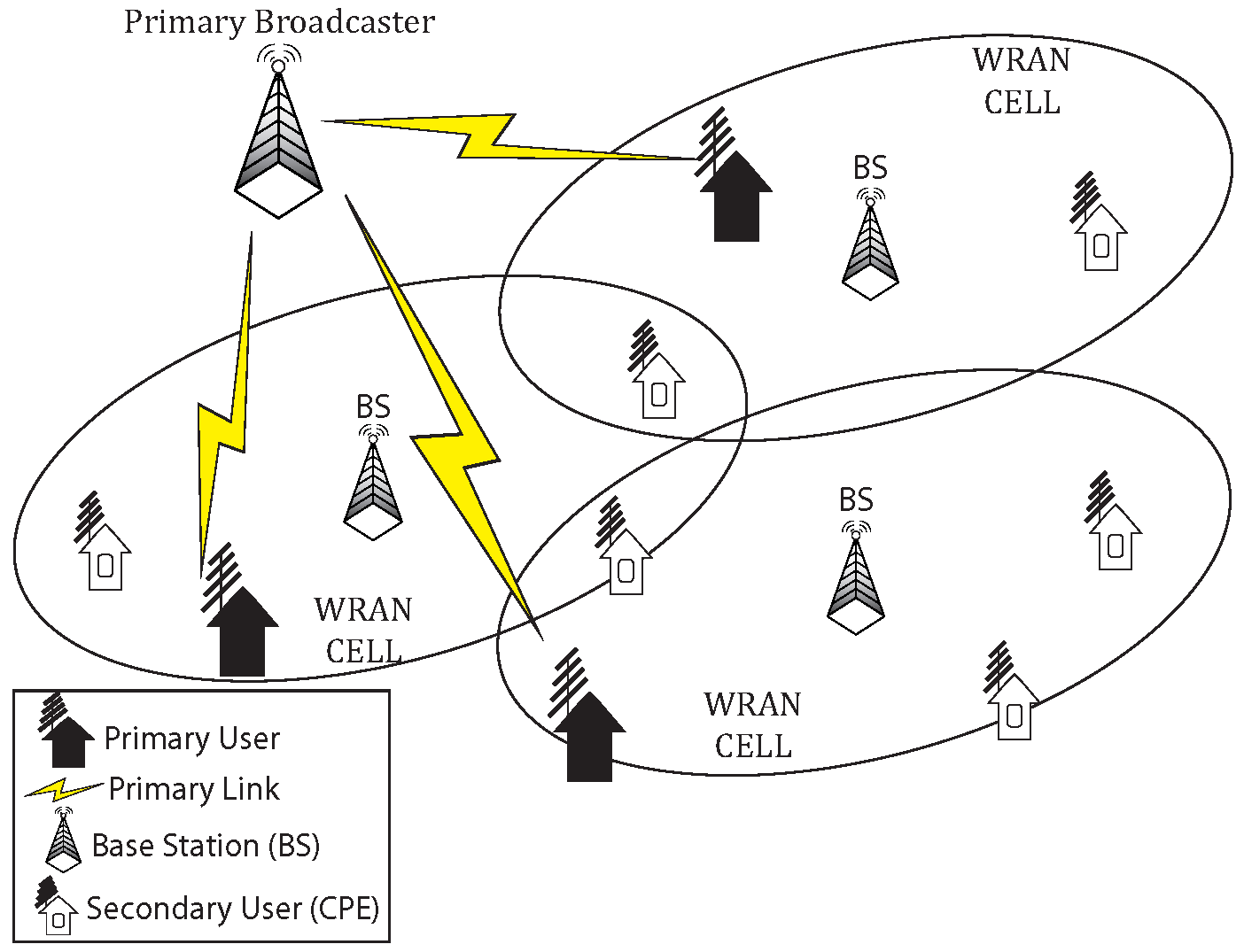
3.1. System Model
3.2. Downlink Channel Allocation and Power Control
4. Distributed Solution for Self-Coexistence
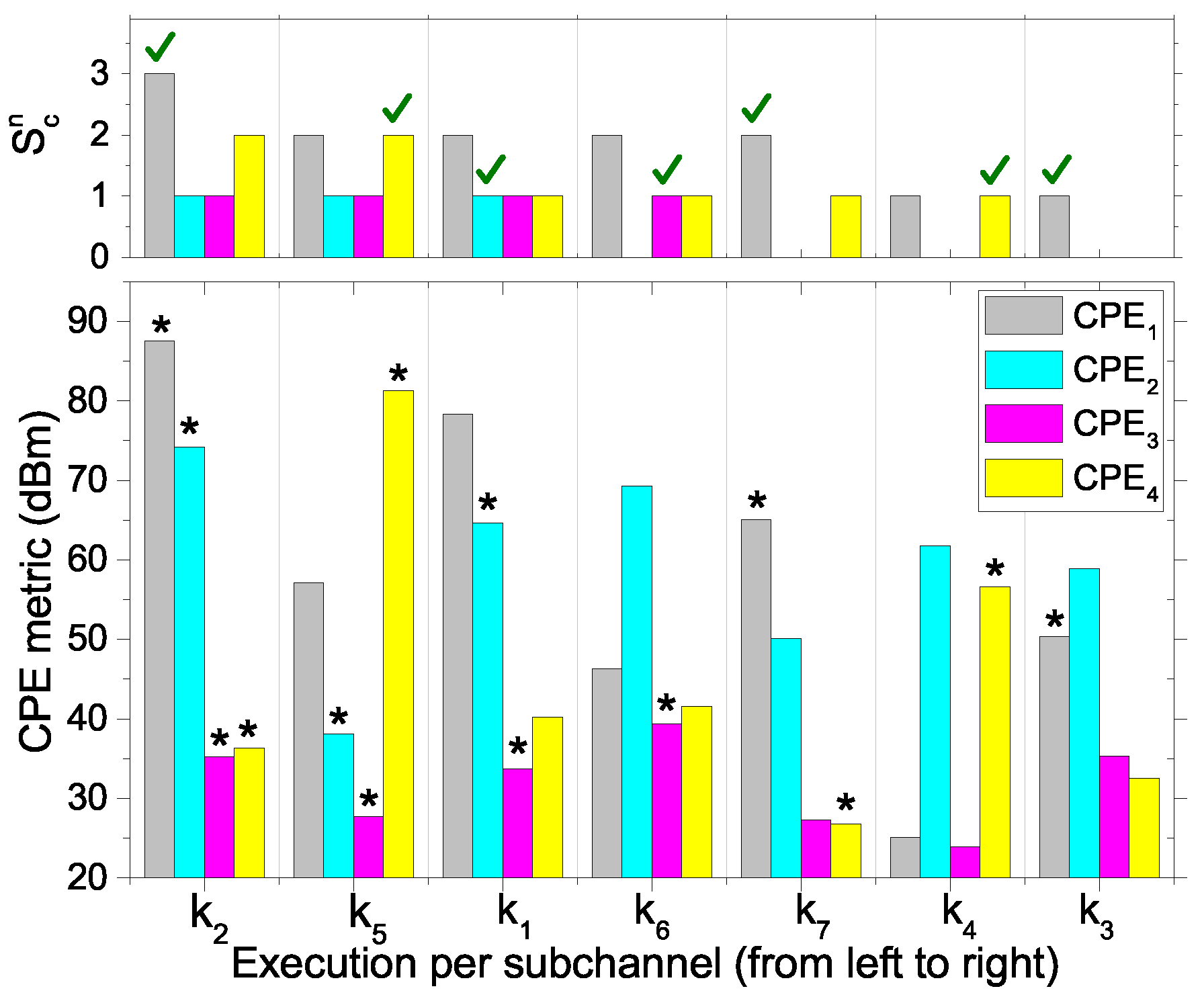
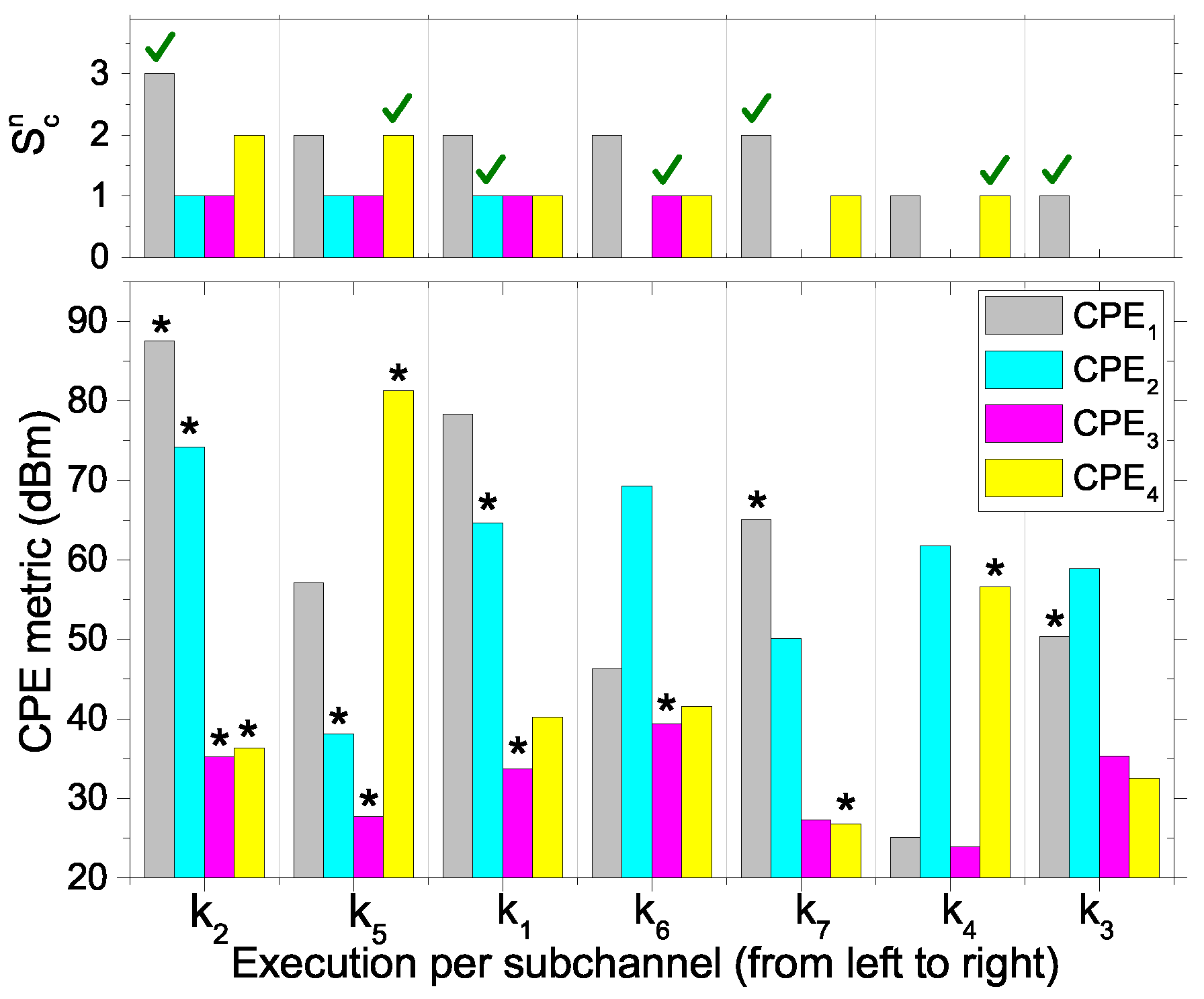
4.1. Greedy Subchannel Assignment
4.2. Non-Cooperative Game for Power Allocation
4.2.1. Game Model and Utility Function
4.2.2. Existence and Uniqueness of the Nash Equilibrium
- The strategy space is a non-empty, compact and convex subset of a particular Euclidean space.
- The payoff function is continuous in and quasi-concave in .
- 1.
- The NE is unique.
- 2.
- Starting from any random point, the best response converges to the unique equilibrium in successive iterations.
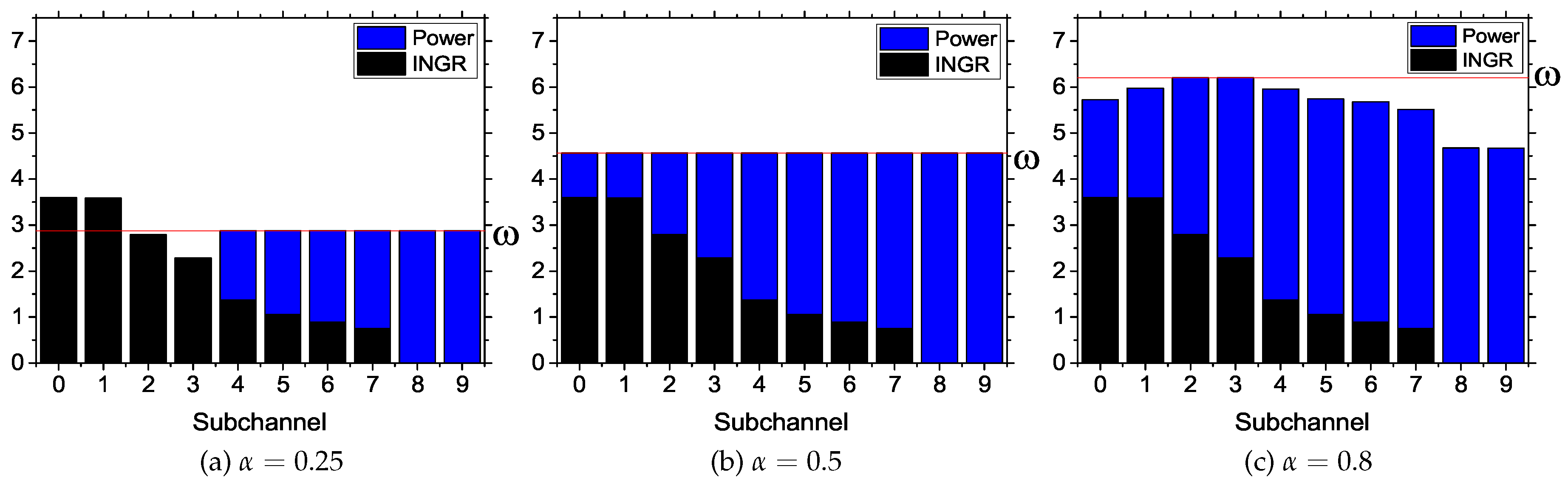
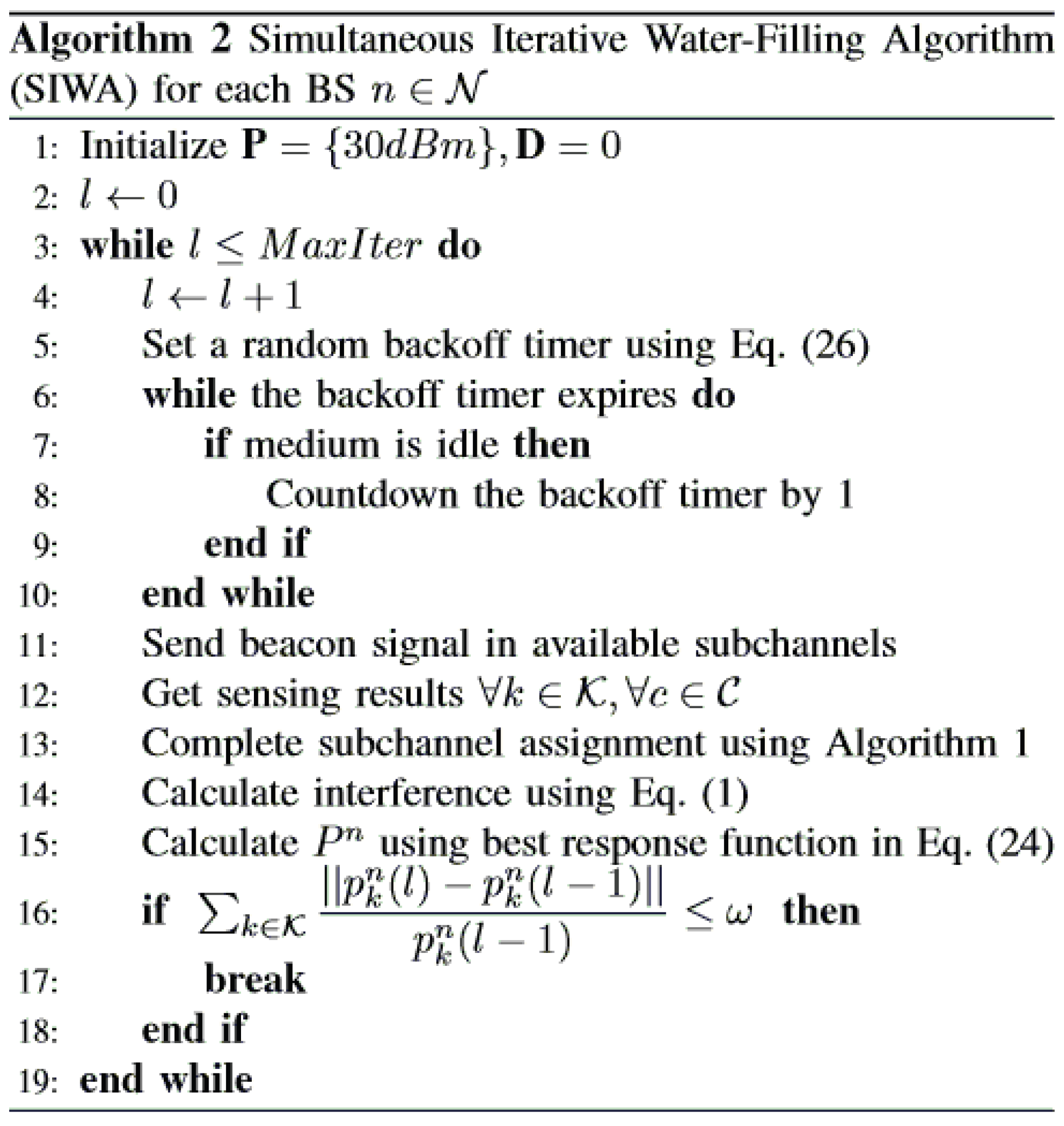
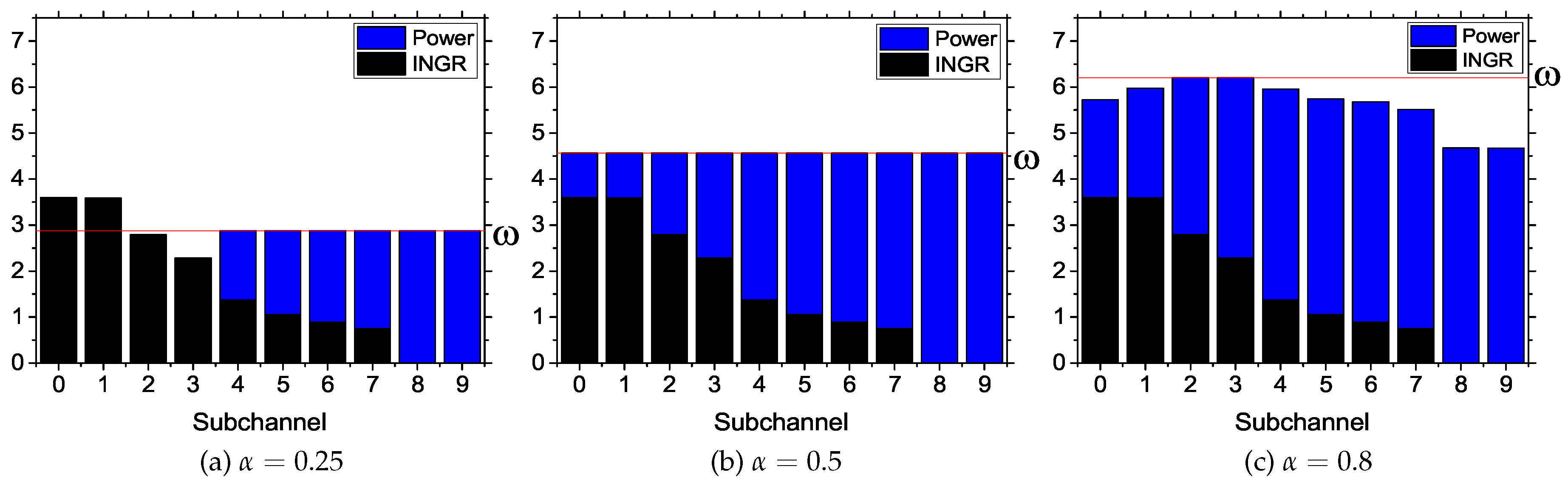
4.3. Iterative Water-Filling Power Allocation
5. Performance Evaluation
5.1. Environment Setup
5.2. Performance Metrics
- –
- –
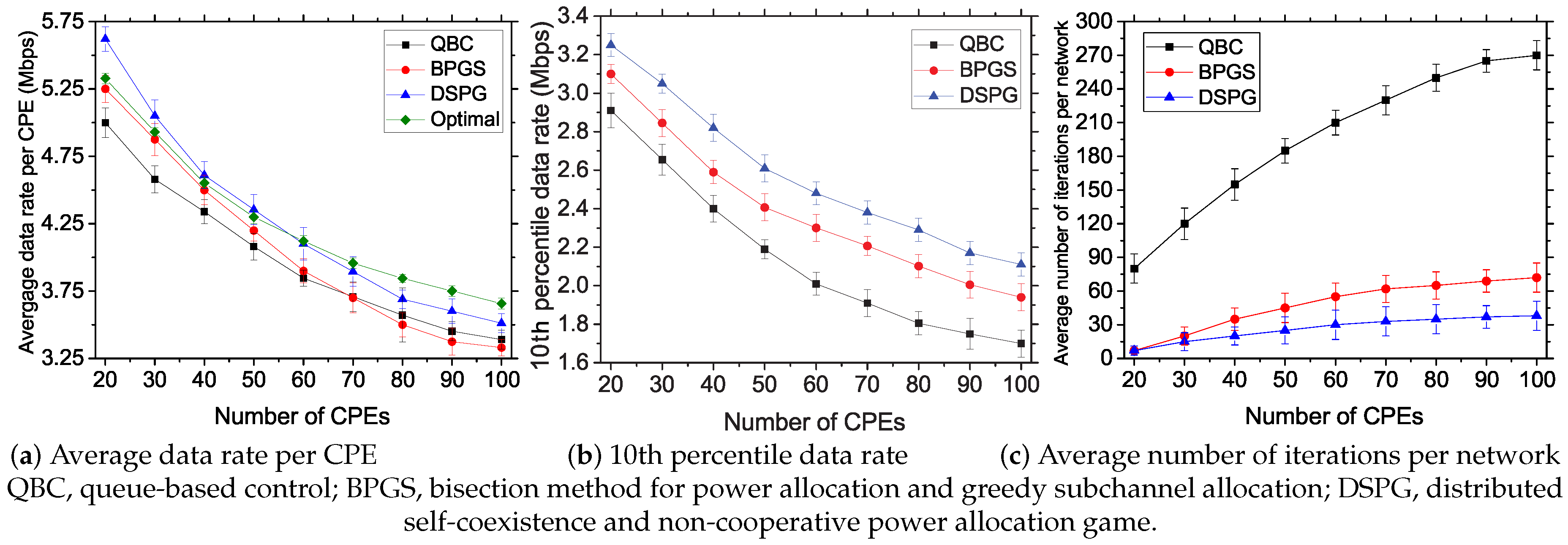
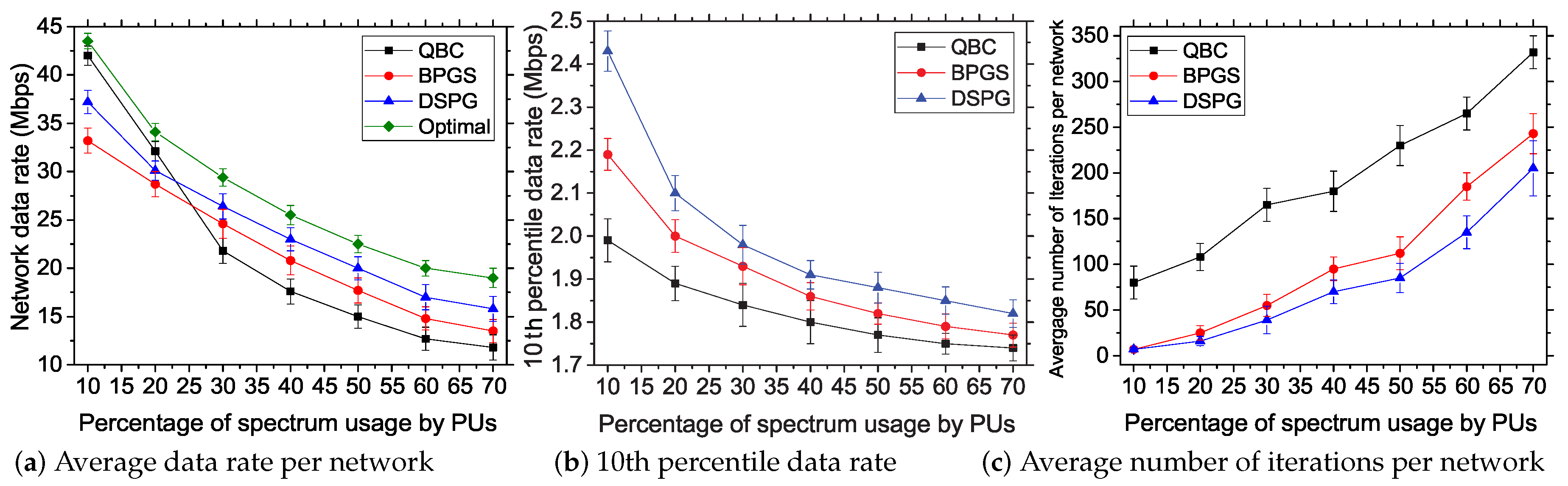
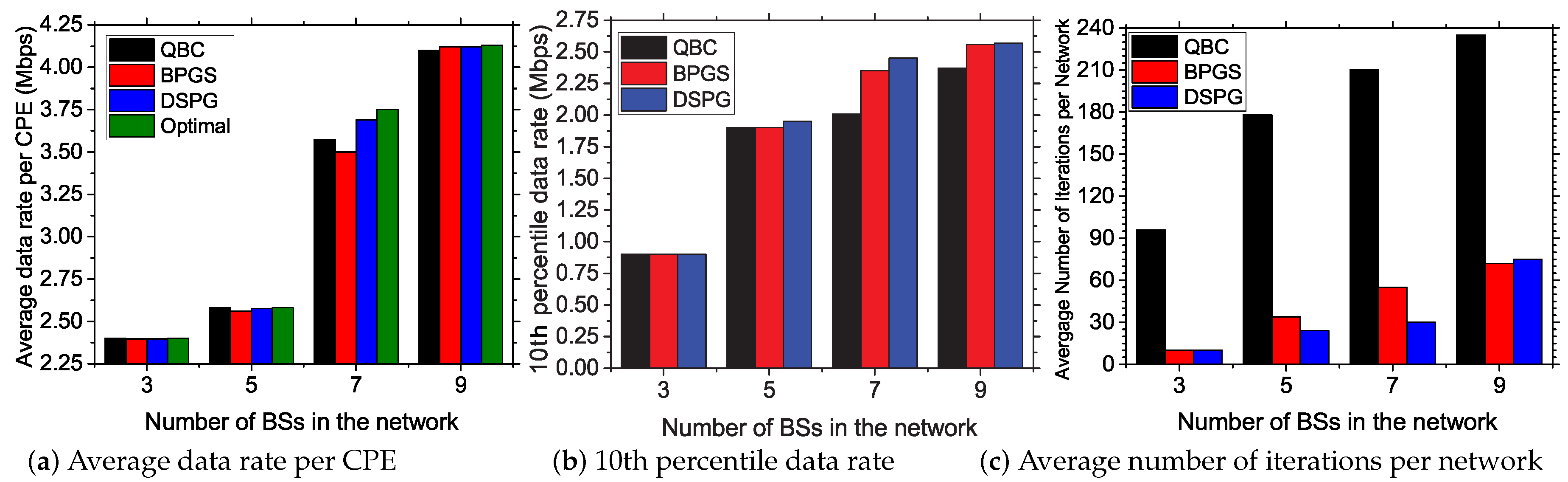
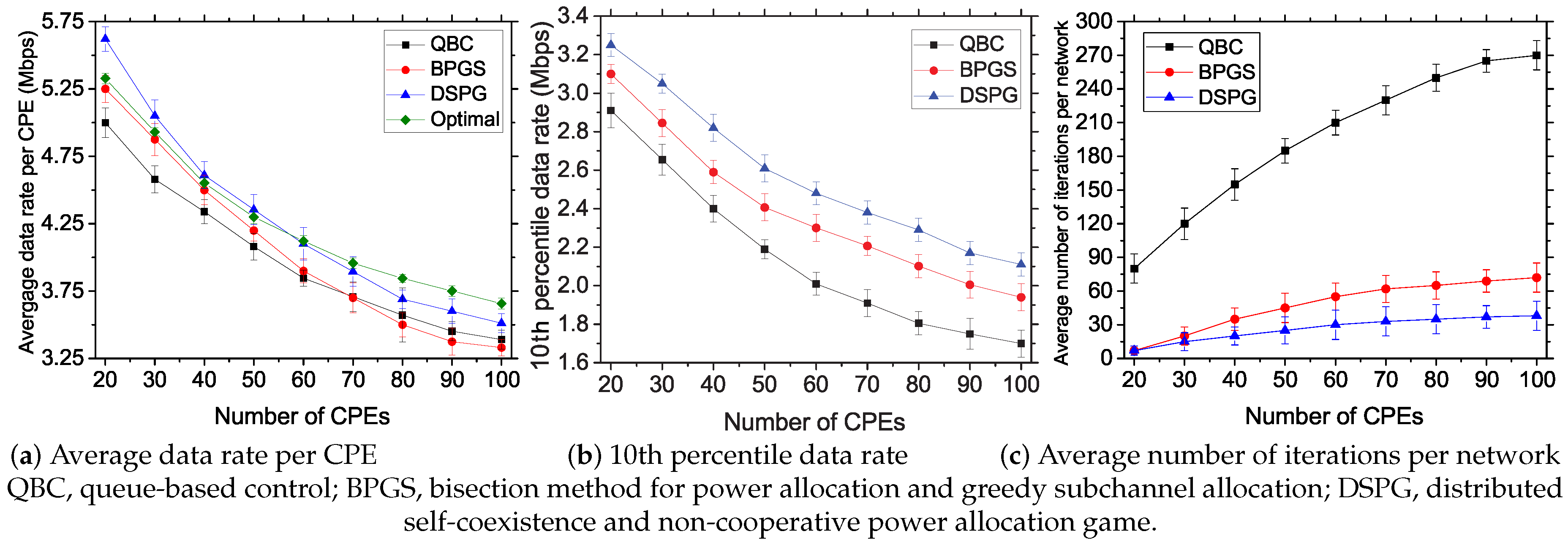
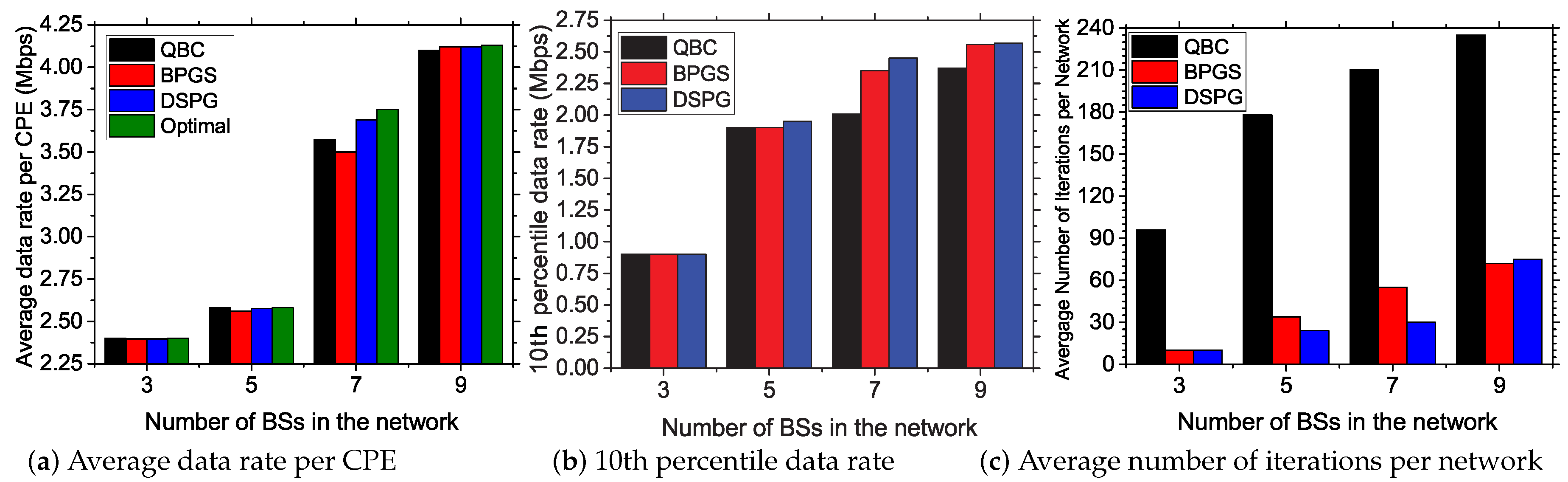
- Tenth percentile data rate: Fairness is orchestrated by measuring the 10th percentile data rate of the network cells. This means that more than 10% of the CPEs have data rates higher than the measurement, presented in the associated graphical representations.
- –
- Convergence cost: The convergence cost is measured by the number of iterations required per network to reach the NE point. A high convergence cost adds overhead to the algorithm performance and delays the scheduling process.
- –
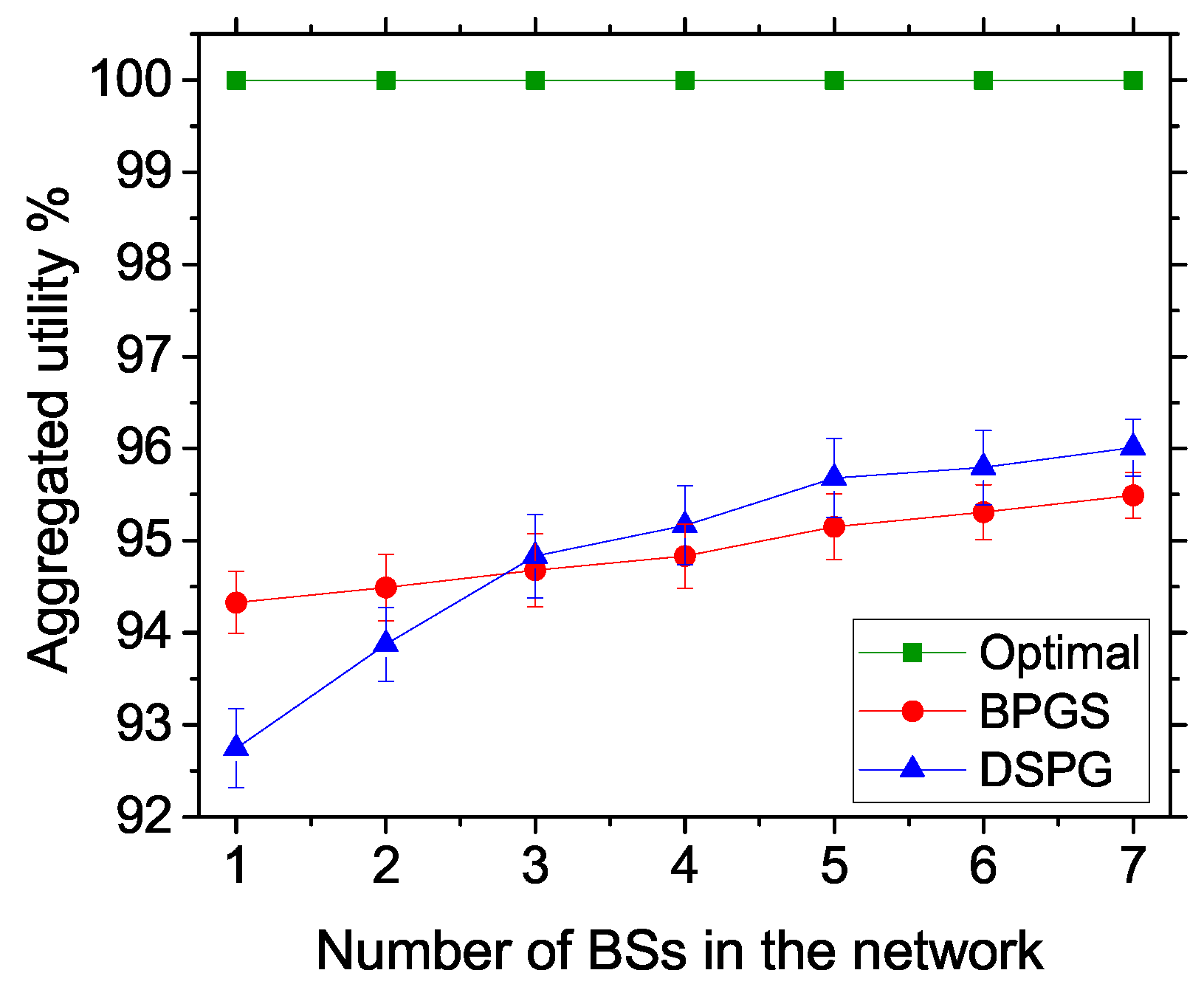
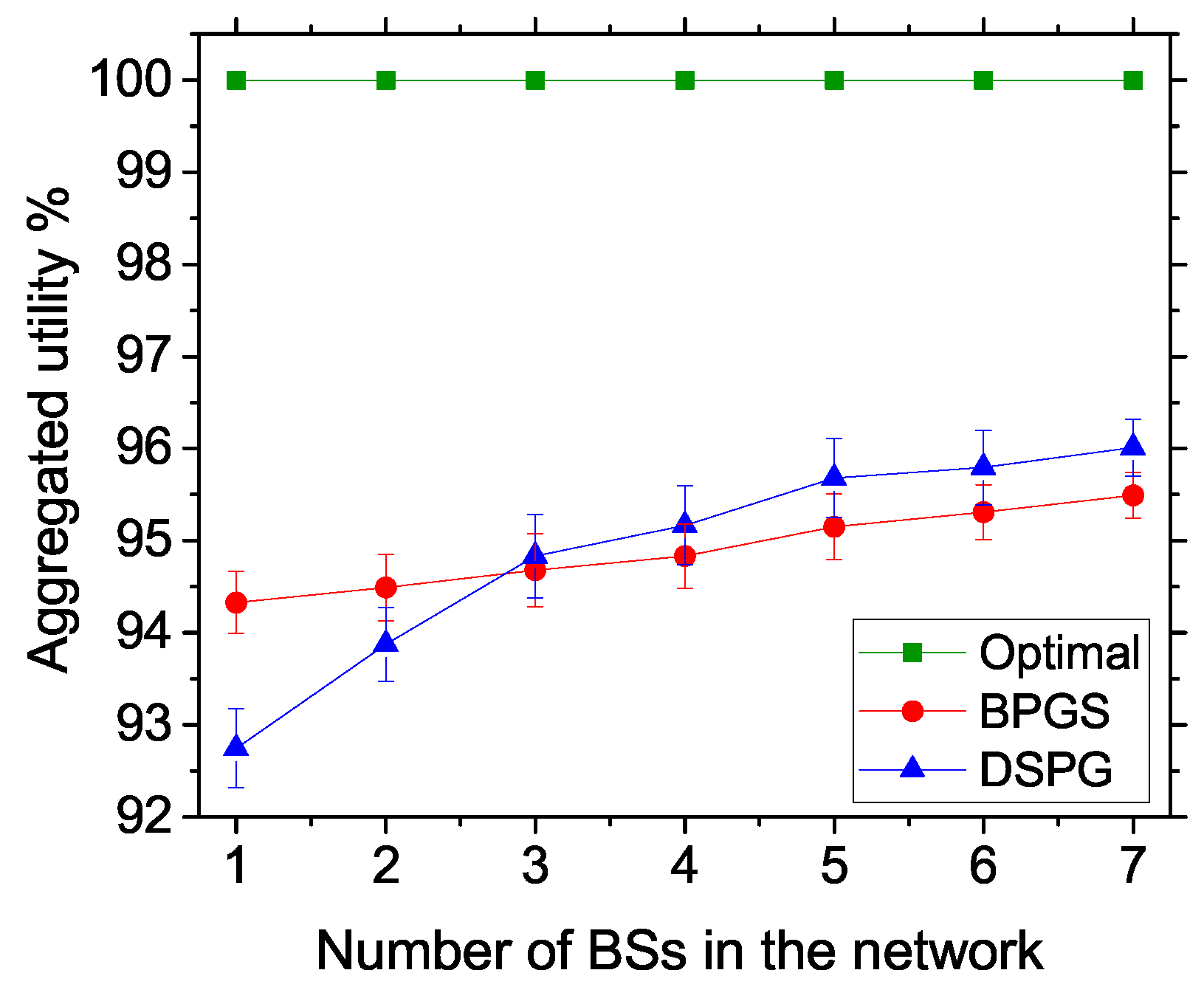
- Aggregated utility: To measure the optimality of the algorithms, we calculate the aggregated utility values given in Equation (6). For effective comparison of DSPG and BPGS with the optimal value, the utility value is calculated using Equation (18) in each BS separately and aggregated later. Then, we take the percentage of the aggregated utility value with respect to the optimal value obtained using Equation (6) under the same network environment constraints.
5.3. Experimental Results
5.3.1. Impact of CPE Density
5.3.2. Impact of PU Density on the Network
5.3.3. Impact of Number of BSs
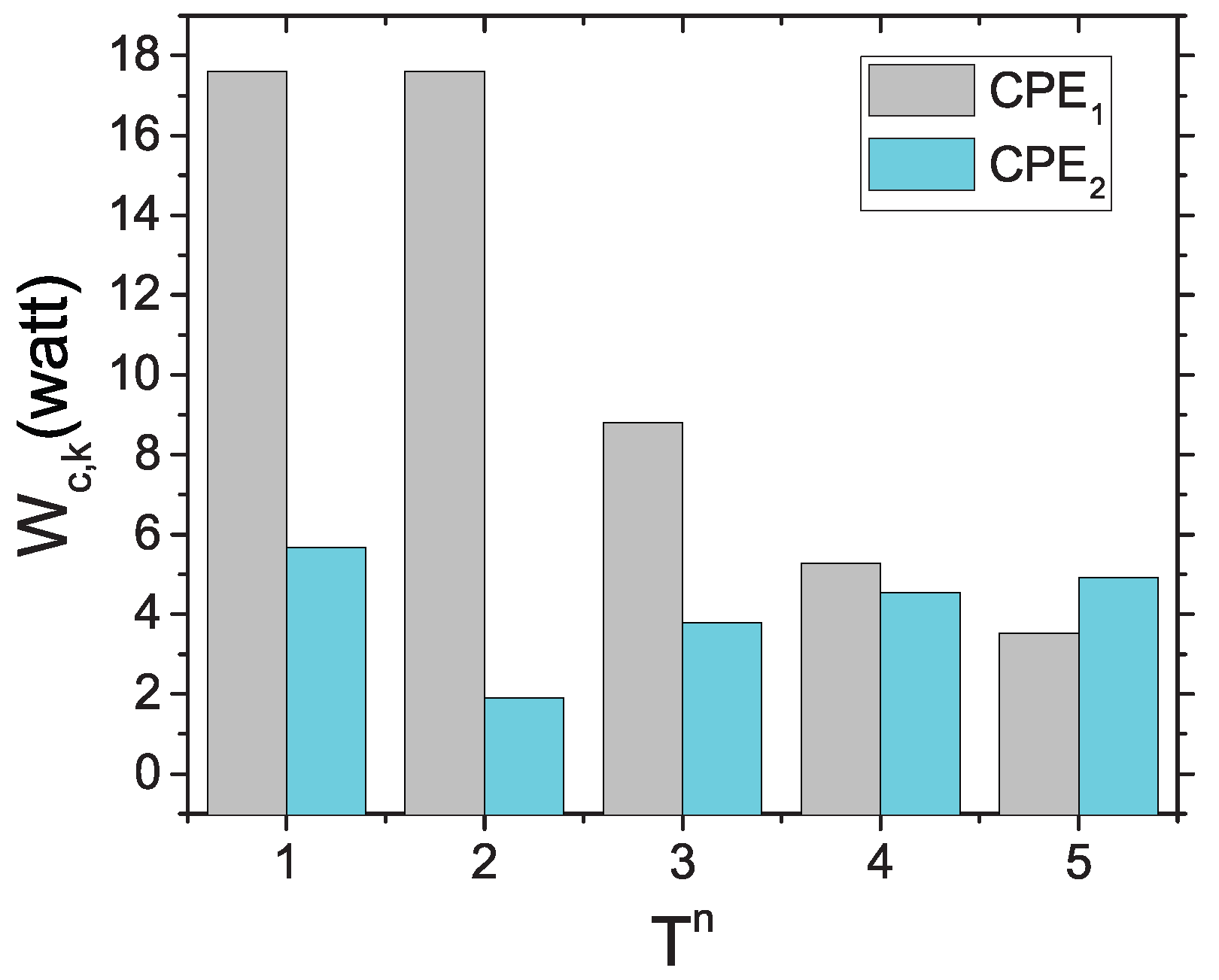
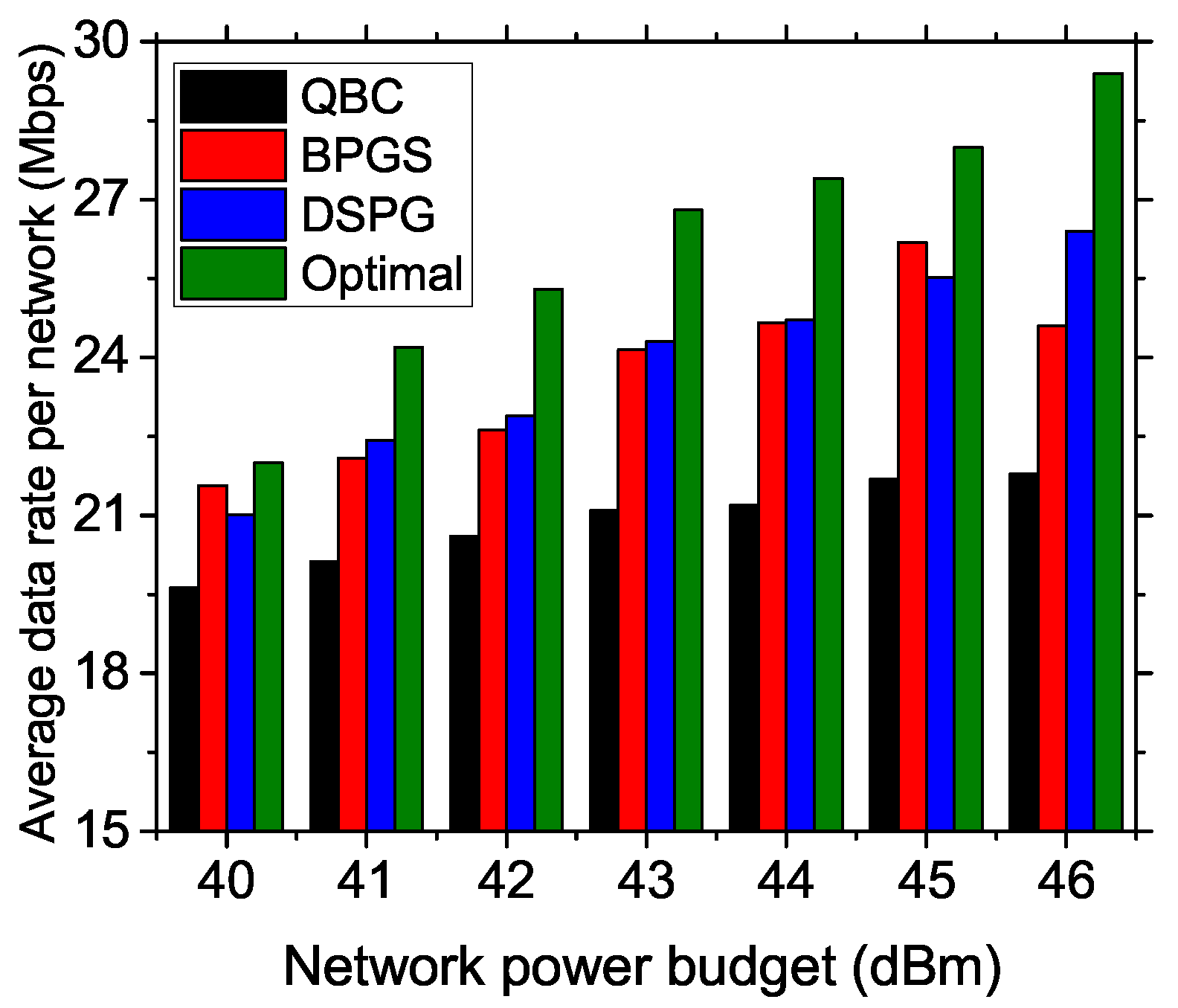
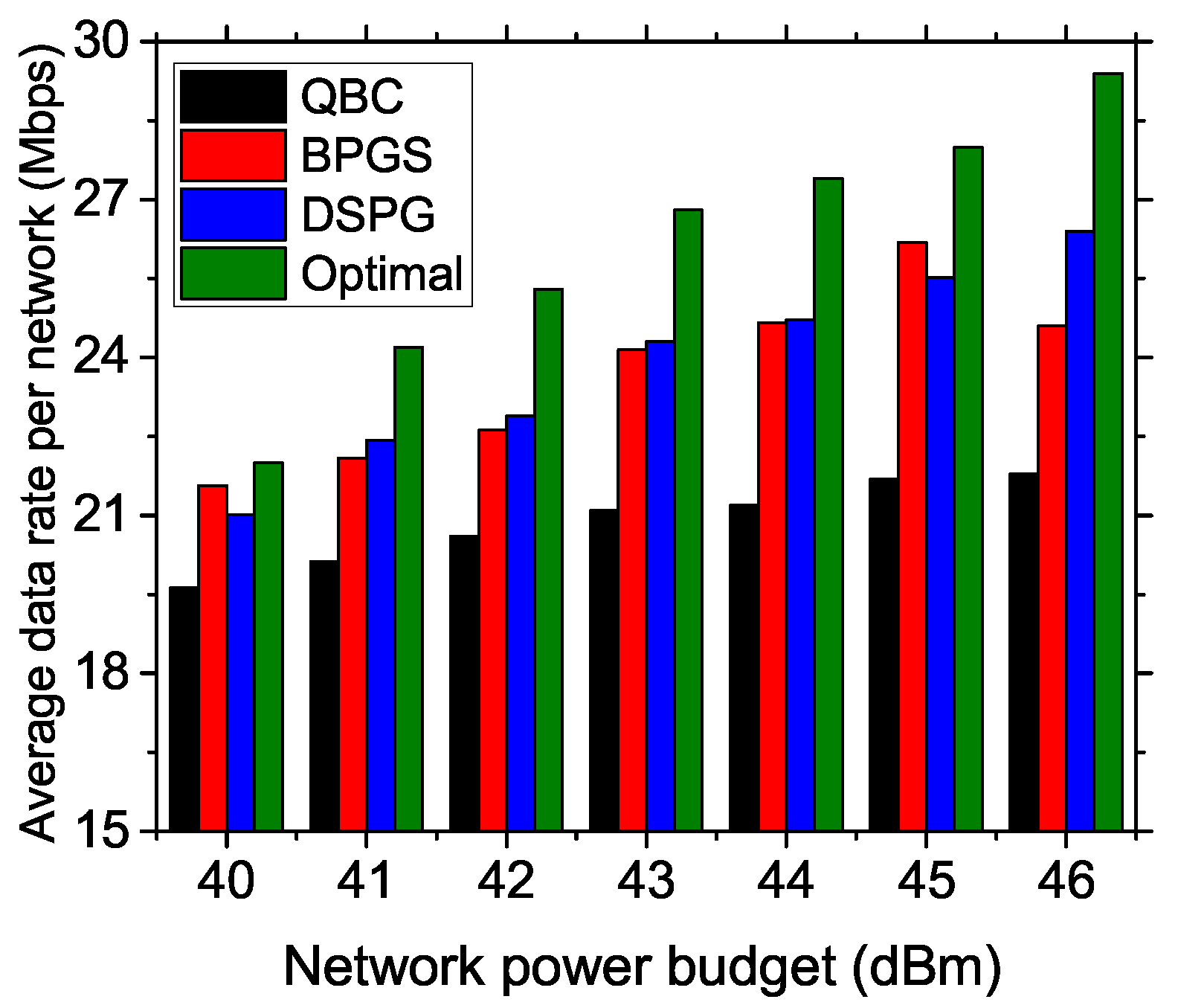
5.3.4. Network Power Budget Estimation
5.3.5. Estimation of Aggregated Utility at Different BSs
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Proof of Proposition 1
Appendix B. Proof of Theorem 2
References
- Mitola, J.; Maguire, G.Q., Jr. Cognitive radio: making software radios more personal. Pers. Commun. IEEE 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Lee, W.Y.; Vuran, M.C.; Mohanty, S. NeXt generation/dynamic spectrum access/cognitive radio wireless networks: A survey. Comput. Netw. 2006, 50, 2127–2159. [Google Scholar] [CrossRef]
- Vijay, G.; Bdira, E.B.A.; Ibnkahla, M. Cognition in wireless sensor networks: A perspective. IEEE Sens. J. 2011, 11, 582–592. [Google Scholar] [CrossRef]
- Joshi, G.P.; Nam, S.Y.; Kim, S.W. Cognitive radio wireless sensor networks: Applications, challenges and research trends. Sensors 2013, 13, 11196–11228. [Google Scholar] [CrossRef] [PubMed]
- Stevenson, C.R.; Chouinard, G.; Lei, Z.; Hu, W.; Shellhammer, S.J.; Caldwell, W. IEEE 802.22: The First Cognitive Radio Wireless Regional Area Network Standard. Comm. Mag. 2009, 47, 130–138. [Google Scholar] [CrossRef]
- Hu, W.; Willkomm, D.; Abusubaih, M.; Gross, J.; Vlantis, G.; Gerla, M.; Wolisz, A. Cognitive radios for dynamic spectrum access-dynamic frequency hopping communities for efficient IEEE 802.22 operation. Commun. Mag. IEEE 2007, 45, 80–87. [Google Scholar] [CrossRef]
- Tragos, E.Z.; Zeadally, S.; Fragkiadakis, A.G.; Siris, V.A. Spectrum Assignment in Cognitive Radio Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2013, 15, 1108–1135. [Google Scholar] [CrossRef]
- Saleem, Y.; Rehmani, M.H. Primary radio user activity models for cognitive radio networks: A survey. J. Netw. Comput. Appl. 2014, 43, 1–16. [Google Scholar] [CrossRef]
- Gurney, D.; Buchwald, G.; Ecklund, L.; Kuffner, S.; Grosspietsch, J. Geo-location database techniques for incumbent protection in the TV white space. In Proceedings of the 3rd IEEE Symposium on New Frontiers in Dynamic Spectrum Access Networks, Chicago, IL, USA, 14–17 October 2008; pp. 1–9. [Google Scholar]
- Akyildiz, I.F.; Lee, W.Y.; Vuran, M.C.; Mohanty, S. A survey on spectrum management in cognitive radio networks. IEEE Commun. Mag. 2008, 46. [Google Scholar] [CrossRef]
- Sengupta, S.; Brahma, S.; Chatterjee, M.; Sai Shankar, N. Self-coexistence among interference-aware IEEE 802.22 networks with enhanced air-interface. Pervasive Mob. Comput. 2013, 9, 454–471. [Google Scholar] [CrossRef]
- Bansal, T.; Li, D.; Sinha, P. Opportunistic Channel Sharing in Cognitive Radio Networks. IEEE Trans. Mob. Comput 2014, 13, 852–865. [Google Scholar] [CrossRef]
- Sakin, S.A.; Razzaque, M.A. Game theoretic downlink resource scheduling for self-coexisting cognitive radio networks. In Proceedings of the 2016 International Conference on Networking Systems and Security (NSysS), Dhaka, Bangladesh, 7–9 January 2016; pp. 1–7. [Google Scholar]
- Asheralieva, A.; Mahata, K. Joint power and bandwidth allocation in IEEE 802.22 based cognitive LTE network. Comput. Netw. 2014, 71, 117–129. [Google Scholar] [CrossRef]
- Sengupta, S.; Chandramouli, R.; Brahma, S.; Chatterjee, M. A game theoretic framework for distributed self-coexistence among IEEE 802.22 networks. In Proceedings of the Global Telecommunications Conference, New Orleans, LO, USA, 30 November–4 December 2008; pp. 1–6. [Google Scholar]
- Gardellin, V.; Das, S.K.; Lenzini, L. A fully distributed game theoretic approach to guarantee self-coexistence among WRANs. In Proceedings of the INFOCOM IEEE Conference on Computer Communications Workshops, San Diego, CA, USA, 15–19 March 2010; pp. 1–6. [Google Scholar]
- Riley, G.; Henderson, T. The ns-3 Network Simulator. In Modeling and Tools for Network Simulation; Wehrle, K., Gunes, M., Gross, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 15–34. [Google Scholar]
- Bukhari, S.H.R.; Rehmani, M.H.; Siraj, S. A survey of channel bonding for wireless networks and guidelines of channel bonding for futuristic cognitive radio sensor networks. IEEE Commun. Surv. Tutor. 2016, 18, 924–948. [Google Scholar] [CrossRef]
- Ozger, M.; Akan, O.B. On the utilization of spectrum opportunity in cognitive radio networks. IEEE Commun. Lett. 2016, 20, 157–160. [Google Scholar] [CrossRef]
- Akan, O.B.; Karli, O.B.; Ergul, O. Cognitive radio sensor networks. IEEE Netw. 2009, 23. [Google Scholar] [CrossRef]
- Bukhari, S.H.R.; Siraj, S.; Rehmani, M.H. PRACB: A novel channel bonding algorithm for cognitive radio sensor networks. IEEE Access 2016, 4, 6950–6963. [Google Scholar] [CrossRef]
- Mahmoud, H.A.; Yucek, T.; Arslan, H. OFDM for cognitive radio: Merits and challenges. IEEE Wirel. Commun. 2009, 16. [Google Scholar] [CrossRef]
- Oh, S.W.; Ma, Y.; Peh, E.; Tao, M.H. TV White Space: The First Step Towards Better Utilization of Frequency Spectrum; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Choi, K.W.; Hossain, E.; Kim, D.I. Downlink subchannel and power allocation in multi-cell OFDMA cognitive radio networks. IEEE Trans. Wirel. Commun. 2011, 10, 2259–2271. [Google Scholar] [CrossRef]
- Bian, K.; Park, J.M.; Gao, B. Cognitive Radio Networks: Medium Access Control for Coexistence of Wireless Systems; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Hossain, E.; Niyato, D.; Han, Z. Dynamic Spectrum Access and Management in Cognitive Radio Networks; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Vishram, M.; Tong, L.C.; Syin, C. List Multi-Coloring based Fair Channel Allocation Policy for Self Coexistence in Cognitive Radio Networks with QoS Provisioning. In Proceedings of the Region 10 Symposium, Kuala Lumpur, Malaysia, 14–16 April 2014. [Google Scholar]
- Ge, Y.; Sun, J.; Shao, S.; Yang, L.; Zhu, H. An improved spectrum allocation algorithm based on proportional fairness in Cognitive Radio networks. In Proceedings of the 2010 12th IEEE International Conference on Communication Technology (ICCT), Nanjing, China, 11–14 November 2010; pp. 742–745. [Google Scholar]
- Camarda, P.; Cormio, C.; Passiatore, C. An exclusive self-coexistence (ESC) resource sharing algorithm for cognitive 802.22 networks. In Proceedings of the 2010 5th IEEE International Symposium onWireless Pervasive Computing (ISWPC), Modena, Italy, 5–7 May 2010; pp. 128–133. [Google Scholar]
- Gardellin, V.; Das, S.K.; Lenzini, L. Self-coexistence in cellular cognitive radio networks based on the IEEE 802.22 Standard. IEEE Wirel. Commun. 2013, 70, 52–59. [Google Scholar] [CrossRef]
- Rondeau, T.W.; Bostian, C.W. Artificial Intelligence in Wireless Communications; Artech House: Norwood, MA, USA, 2009. [Google Scholar]
- Brahma, S.; Chatterjee, M. Mitigating self-interference among IEEE 802.22 networks: A game theoretic perspective. In Proceedings of the Global Telecommunications Conference, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–6. [Google Scholar]
- Huang, D.; Miao, C.; Miao, Y.; Shen, Z. A game theory approach for self-coexistence analysis among IEEE 802.22 networks. In Proceedings of the 7th International Conference on Information, Communications and Signal Processing, Macau, China, 8–10 December 2009; pp. 1–5. [Google Scholar]
- Ko, C.H.; Wei, H.Y. Game theoretical resource allocation for inter-BS coexistence in IEEE 802.22. IEEE Trans. Veh. Technol. 2010, 59, 1729–1744. [Google Scholar]
- Kibria, M.G.; Villardi, G.P.; Ishizu, K.; Kojima, F. Throughput enhancement of multicarrier cognitive M2M networks: Universal-filtered OFDM systems. IEEE Internet Things J. 2016, 3, 830–838. [Google Scholar] [CrossRef]
- Illanko, K.; Naeem, M.; Anpalagan, A.; Androutsos, D. Energy-Efficient Frequency and Power Allocation for Cognitive Radios in Television Systems. IEEE Syst. J. 2016, 10, 313–324. [Google Scholar] [CrossRef]
- Hoang, A.T.; Liang, Y.C. Downlink channel assignment and power control for cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 3106–3117. [Google Scholar] [CrossRef]
- Aijaz, A.; Aghvami, A.H. Cognitive machine-to-machine communications for Internet-of-Things: A protocol stack perspective. IEEE Internet Things J. 2015, 2, 103–112. [Google Scholar] [CrossRef]
- IEEE Standard for Information technology—Local and metropolitan area networks—Specific requirements—Part 22: Cognitive Wireless RAN Medium Access Control (MAC) and Physical Layer (PHY) specifications: Policies and procedures for operation in the TV Bands. In IEEE Std 802.22-2011; IEEE: New York, NY, USA, 2011; pp. 1–680.
- Zhao, J.; Zheng, H.; Yang, G.H. Distributed coordination in dynamic spectrum allocation networks. 2005 First IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks, Baltimore, MD, USA, 8–11 November 2005; pp. 259–268. [Google Scholar]
- Lo, B.F. A survey of common control channel design in cognitive radio networks. Phys. Commun. 2011, 4, 26–39. [Google Scholar] [CrossRef]
- Miazi, M.N.S.; Tabassum, M.; Razzaque, M.A.; Abdullah-Al-Wadud, M. An energy-efficient common control channel selection mechanism for Cognitive Radio Adhoc Networks. Annals of Telecommunications-Annales des TéLéCommunications 2015, 70, 11–28. [Google Scholar] [CrossRef]
- Avriel, M. Nonlinear Programming: Analysis and Methods; Prentice-Hall series in automatic computation; Prentice-Hall: Upper Saddle River, NJ, USA, 1976. [Google Scholar]
- Osborne, M.; Rubinstein, A. A Course in Game Theory; MIT Press: Cambridge, MA, USA, 1994. [Google Scholar]
- Scutari, G.; Palomar, D.P.; Barbarossa, S. Asynchronous iterative water-filling for Gaussian frequency-selective interference channels. IEEE Trans. Inf. Theory 2008, 54, 2868–2878. [Google Scholar] [CrossRef]
- Granas, A.; Dugundji, J. Fixed Point Theory; Monographs in Mathematics; Springer: Berlin, Germany, 2003. [Google Scholar]
- Abraham, R.; Marsden, J.E.; Ratiu, T. Manifolds, Tensor Analysis, and Applications; Springer Science & Business Media: Berlin, Germany, 2012; Volume 75. [Google Scholar]
- Katzela, I.; Naghshineh, M. Channel assignment schemes for cellular mobile telecommunication systems: A comprehensive survey. Pers. Commun. IEEE 1996, 3, 10–31. [Google Scholar] [CrossRef]
- Friis, H.T. A note on a simple transmission formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Udell, M.; Mohan, K.; Zeng, D.; Hong, J.; Diamond, S.; Boyd, S. Convex Optimization in Julia. SC14 Workshop on High Performance Technical Computing in Dynamic Languages. arXiv 2014, arXiv:math-oc/1410.4821. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definitions |
|---|---|
| Set of sessions assigned by BS | |
| to CPE | |
| Set of sessions assigned by BS , | |
| where | |
| Set of sessions initiated by CPE | |
| Set of all sessions in the total vicinity area, | |
| where | |
| , where is a binary indicator | |
| having ‘1’ if downlink subchannel is | |
| assigned to session and ‘0’ otherwise | |
| Channel gain from BS | |
| Transmission power of BS n in subchannel | |
| Transmission power vector of BS | |
| Maximum power level of a BS | |
| Power allocation matrix | |
| Average Gaussian noise power | |
| Minimum SINR of session to achieve | |
| a certain BER | |
| Calculated SINR of session in | |
| Quality-of-service requirement for session | |
| Data rate of session in | |
| Total interference inflicted by session | |
| in | |
| PU interference inflicted by CPE in | |
| subchannel |
| Parameter | Value |
|---|---|
| Node mobility | Stationary |
| Area | 75 km × 86 km |
| Operational frequency | 470 MHz–608 MHz |
| Bandwidth | 6 MHz |
| Duplexing method | TDD |
| Modulation type | 16-QAM |
| Coding rate | 1/2 |
| Path loss exponent | 2 |
| Transmission range | 25 km–30 km |
| BS Sensing range | 50 km–75 km |
| CPE Sensing range | 10 km–25 km |
| Max. transmission power | 46 dBm |
| 0.8 | |
| 0.001 | |
| Propagation loss model | Friis propagation loss model [49] |
| Noise model | (AWGN) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sakin, S.A.; Razzaque, M.A.; Hassan, M.M.; Alamri, A.; Tran, N.H.; Fortino, G. Self-Coexistence among IEEE 802.22 Networks: Distributed Allocation of Power and Channel. Sensors 2017, 17, 2838. https://doi.org/10.3390/s17122838
Sakin SA, Razzaque MA, Hassan MM, Alamri A, Tran NH, Fortino G. Self-Coexistence among IEEE 802.22 Networks: Distributed Allocation of Power and Channel. Sensors. 2017; 17(12):2838. https://doi.org/10.3390/s17122838
Chicago/Turabian StyleSakin, Sayef Azad, Md. Abdur Razzaque, Mohammad Mehedi Hassan, Atif Alamri, Nguyen H. Tran, and Giancarlo Fortino. 2017. "Self-Coexistence among IEEE 802.22 Networks: Distributed Allocation of Power and Channel" Sensors 17, no. 12: 2838. https://doi.org/10.3390/s17122838
APA StyleSakin, S. A., Razzaque, M. A., Hassan, M. M., Alamri, A., Tran, N. H., & Fortino, G. (2017). Self-Coexistence among IEEE 802.22 Networks: Distributed Allocation of Power and Channel. Sensors, 17(12), 2838. https://doi.org/10.3390/s17122838