1. Introduction
One of the main motivations to improve surface reconstruction techniques is to enhance wavefront sensors capabilities, which are instruments used to measure aberrations of incident wavefronts. In high-energy lasers production, these aberrations, i.e., imperfections, reduce the wavefront quality, and may also add undesirable effects to the produced beams, which, in turn, may affect the quality of the experimental outcomes wherein the laser is used. Furthermore, a wide range of technical fields benefit from accurate and efficient surface reconstruction algorithms, for instance the astronomical community, pioneering in developing wavefront reconstruction techniques for telescopes [
1], measurements of eye aberrations [
2], optical devices manufacturers, wherein the reconstruction plays a key role by identifying lens manufacturing errors, adaptive optics (AO) such as in microscopy [
3] or data communication through the Earth’s atmosphere [
4], lateral shearing interferometry [
5,
6,
7], shape from shading [
8], high energy laser (HEL) beam production control [
9], or ophthalmology in refractive surgery [
10].
In high-energy lasers production, opticians strongly prefer the Zernike polynomial set to reconstruct wavefronts and to decompose imperfections into well-known aberration components [
11]. However, other sets have been proposed to be used for reconstructing surfaces (see, for instance, [
12]). On the bright side, the Zernike-based reconstruction has been shown to outperform the iterative Fourier when reconstructing wavefront aberrations from slope data. However, on the other hand, noncircular pupils has posed a challenge to Zernike-based reconstruction, as the performance of this set for this pupils is questionable [
13]. Furthermore, although Zernike polynomials constitute a complete set, hence any wavefront aberration can be decomposed in terms of them, and advantages of orthogonality are lost in noncircular cases. Moreover, the coefficients lose their physical meaning since the circle polynomials do not represent balanced aberrations for the noncircular pupil. In the library distributed along with this work, we provide a simple reconstruction algorithm based on the Legendre polynomial set for reconstructing surfaces in squared domains.
In addition, in producing high-energy lasers, the adaptive optics loop is critical, as in this process the quality of the wavefront is determined. The basic goal of the adaptive optics is easily stated: to measure the aberrations of an incoming wavefront and then cancel these out by applying compensating aberrations, all in real time. Therefore, it is desirable for the reconstruction algorithm to be as fast and accurate as possible. Unfortunately, high accuracy usually implies higher computational cost. The algorithm that we propose in this work, using Spherical Harmonics, may offer an alternative to the classical Zernike-based reconstruction algorithms, especially for automated processes wherein human intervention and analysis are not needed, but speed is, e.g., in adaptive optics [
14].
The paper is organized as follows. In
Section 2, we roughly describe how a Shack–Hartmann wavefront sensor works. In
Section 3, we provide an overview of the modal reconstruction algorithm, and the generalities of our implemented version in OpenWavefrontReconstructor. The mathematical details of our new algorithm, using the Spherical Harmonics for circular domains, to reconstruct surfaces from gradients are given in
Section 4. We also provide a few implementation details relative to the reconstruction algorithm that use classical Zernike polynomials for circular domains, and Legendre for square domains, in
Section 5 and
Section 6. In
Section 7, we describe some general features of OpenWavefrontReconstructor. Numerical results and discussion are given in
Section 8 and finally we close with conclusions and future work in
Section 9.
2. Shack–Hartmann Wavefront Sensor
We will focus on improving the algorithms used internally by Shack–Hartmann wavefront sensors (the reader is referred to [
2] and references therein for technical details on early designs). Roughly speaking, a wavefront sensor consists of three main parts: (a) an opto-mechanical device intended to provide measurements of the original light wavefront to be reconstructed; (b) its associated processing electronics; and (c) the software responsible for the wavefront reconstruction.
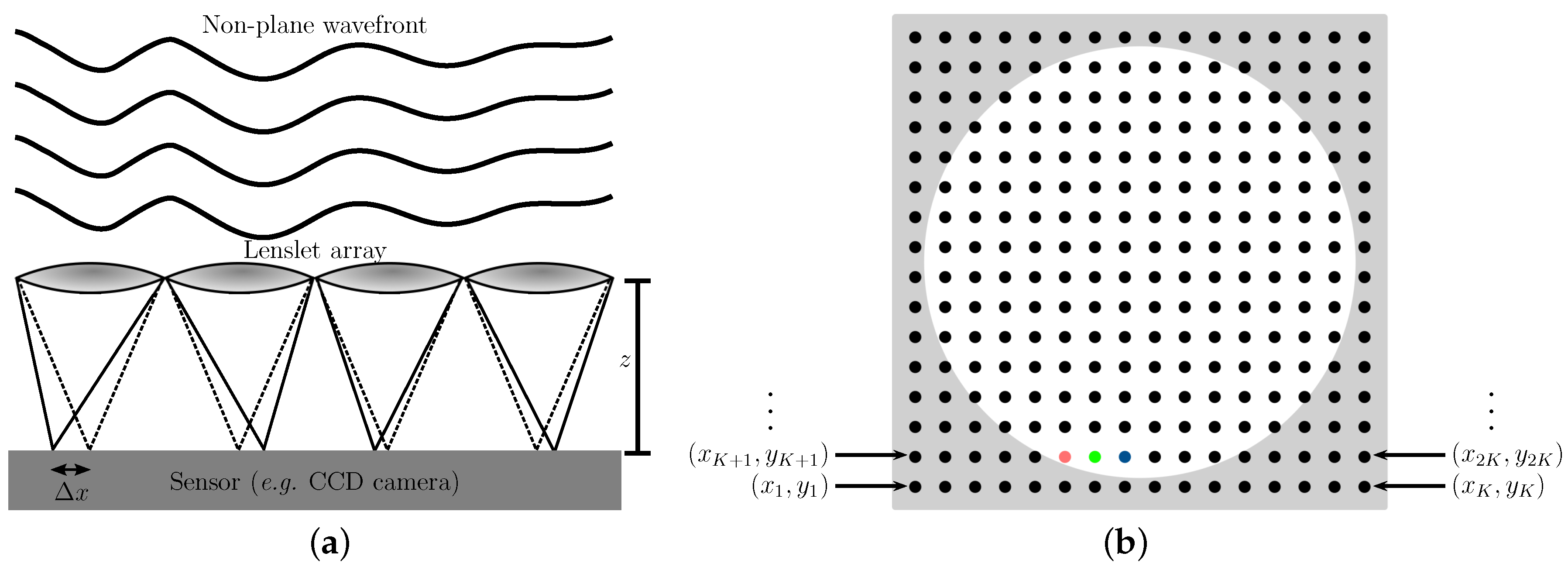
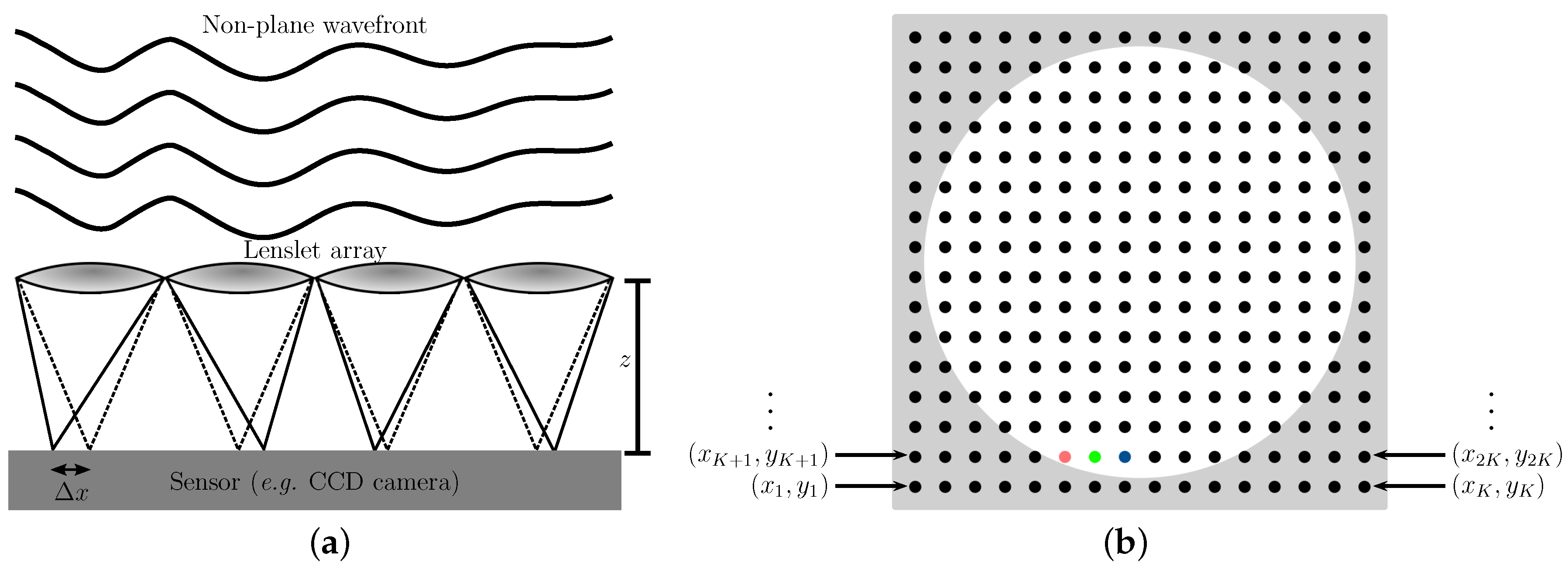
The optomechanical part of a Shack–Hartmann wavefront sensor consists of a lenslet array and a light-sensing device (usually a charge-coupled device (CCD) or complementary metal-oxide-semiconductor (CMOS) camera). When a light wavefront hits the lenslet array (see
Figure 1a), it generates a grid of small light spots (aka the spotfield, see
Figure 1b) that are recorded by the light-sensing device. Through the intensity and shape of each light spot, the position of each center of mass can be found. In addition, if the wavefront is not plane, the produced spots deviate from the vertical position a distance
(see
Figure 1a). Therefore, the wavefront slopes,
and
, can be evaluated through the distance between the lenslets and the sensor device,
z (see
Figure 1a), and
. These slopes constitute the information used to determine the shape of the wavefront through a reconstruction algorithm [
2].
In this work, we will be focused on contibuting to the development of such wavefront reconstruction algorithms. However, the methods can also be used to reconstruct any surface whose slopes (or gradients) are known at a set of points. For this, one simply replaces the focal spots’ coordinates by the coordinates where the slopes are measured.
The spotfield produced by a wavefront sensor is commonly trimmed to fit a circular shape, such as the white zone depicted in
Figure 1a. This is so because, in optics, most of the lenses used to focus light are circular; hence, the area illuminated by a focused light beam is circular as well. Nonetheless, the sensing device usually can record information in square shapes, such as the complete spotfield shown in
Figure 1a, and even on rectangular shapes. Furthermore, noncircular shapes occur frequently; for instance, the cross section of a laser beam in high-power laser facilities is often square [
15].
Since there exists a relation between the shape of the illuminated area and the domain whereupon polynomials sets are defined, in this paper, we will generically denote all shapes with the symbol S, and we will refer to both shape and actual domain indistinctively as domains. These domains are relevant to us because any set of orthogonal polynomials is complete only on a given domain.
3. Wavefront Reconstruction Method
There exist serveral methods to reconstruct a wavefront (or any surface) from slopes. In this paper, we will use the modal reconstruction method, as this is commonly used in Shack–Hartmann wavefront sensors. The modal reconstruction method is built upon the idea that a wavefront inciding on a sensing surface, S, can be recovered from slopes sampled at a set of points.
Furthermore, it is assumed that the wavefront, here denoted by
, can be decomposed into a polynomial series truncated to the term
J:
Here,
denotes a generalized set of functions (which is usually a set of polynomials orthogonal on the domain
S),
the coefficients of the expansion, and
an ordering index that depends on the specific set
. Traditionally, if
S is a square, then
where
are the Legendre Polynomials, and
is some ordering function of the indices
k and
l. In the same fashion, if
S is a circle, then
Here,
are the classical Zernike polynomials [
11], whose radial degree is
l, and
is the respective ordering function of the indices
l and
m (see [
16]). The specific form of
depends specifically on the type of polynomials used to expand the wavefront, and there is no universal convention (see
Section 4,
Section 5 and
Section 6 for our specific implementation).
If Equation (
1) is valid for a wavefront,
, its gradient at any point
is given by:
where
and
are unit vectors in
x and
y directions, respectively. Therefore, if
is known at a set of points, then the coefficients of the polynomial expansion can be recovered (see below). These slopes are precisely the information measured by a wavefront sensor.
3.1. Matrix Assembly
From the spot coordinates,
(see
Figure 1b), we can assemble an array to contain the slopes of the wavefront at all sampled points
, as follows:
In Equation (
5), the coefficients
can be fitted to match the experimental slopes, and
i is an index related to each focal spot (see
Figure 1b). In the rest of this section, we will assume that our expansion has
J terms, i.e., as in Equation (
1), and that there are
I sampled points whose coordinates are
,
.
Similarly as for the ordering index
, there is no universal convention regarding the order of the coordinates of the focal spots. For square domains, the order of the nodes may be given as indicated in
Figure 1b (here the grid has
spotlights), and for circular domains, the numbering may be given as
[red point],
[green point],
[blue point], etc. Fortunately, reconstruction algorithms do not depend on the specific ordering system of the focal spots; however, they depend on how exactly the coordinates of each node are known.
Equation (
5) can be rewritten as:
Here,
is the array of the expansion coefficients
:
and the matrix
(whose dimension is
) is constructed as:
3.2. Least-Squares Method and Singular Value Decomposition
The coefficients
can be found by the least-squares method, applied to Equation (
6). For this, in the C++ library distributed along with this paper, we use the Singular Value Decomposition theorem [
17,
18], which states that any
real matrix
can be decomposed as
where in
(
) is an
matrix that orthogonally diagonalizes
,
is an
ortogonal matrix, and the non-zero diagonal elements of the
matrix
are the non-zero eigenvalues of
corresponding to the column vectors (
) of
. Therefore, the coefficients of the expansion are given by
and the wavefront at any point is thus given by Equation (
1).
In version 1.0.0 of OpenWavefrontReconstructor, we provide an implementation that uses the armadillo library [
19] for solving Equation (
10). The user may re-implement some of the functions of the library, should he/she desire to use a different linear algebra library. Optionally, the user may implement another third-party linear algebra library of his/her choice.
3.3. Wavefront Retrieving
Once the coefficients of the expansion,
, are known, the values of the wavefront (or surface) at the sampled points,
, can be recovered through the following matrix equation:
Here, if there are
I sampled points,
, the matrix
has dimensions
. Of course, the wavefront can also be obtained at any point through Equation (
1).
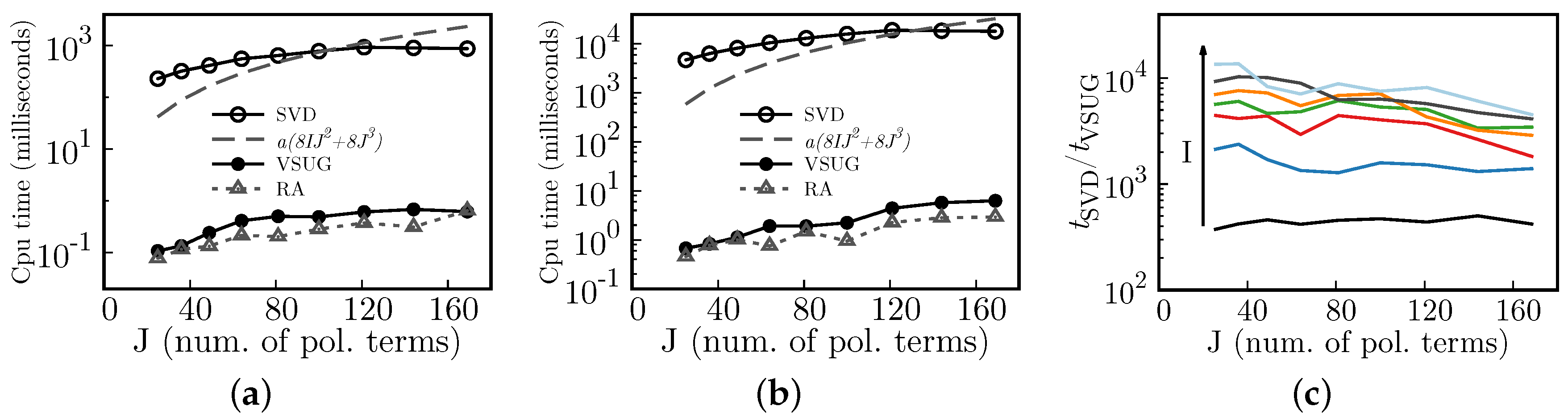
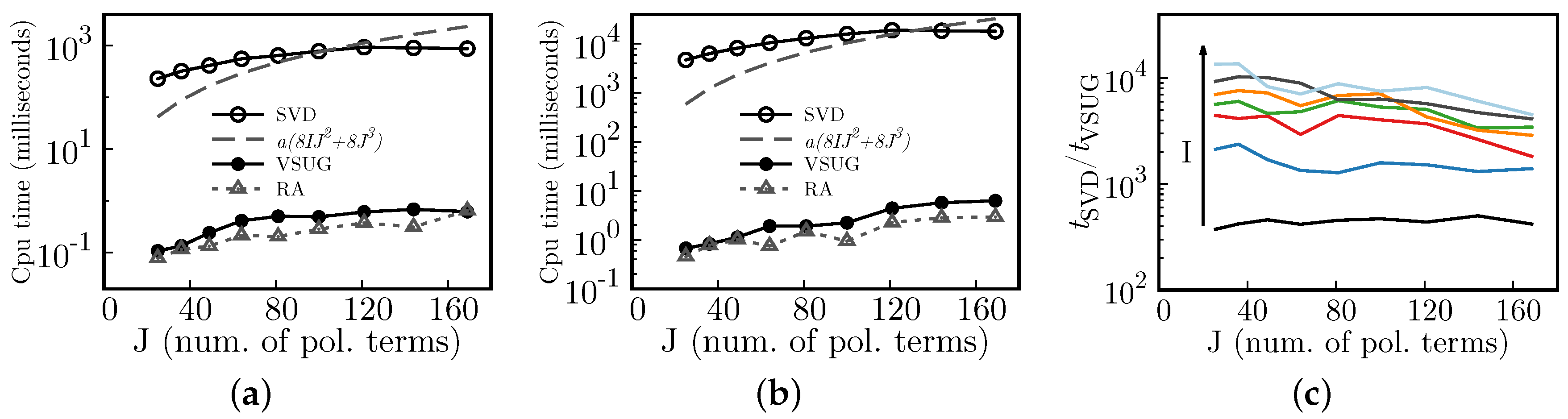
A performance remark: once the matrices and are generated during the first reconstruction, subsequent reconstructions can be carried out with a much smaller computational cost, using the same matrices. This is valid only if the focal spots’ coordinates do not change from reconstruction to reconstruction, which is true for wavefront sensors. For instance, the coefficients of a new wavefront expansion, , whose slopes are given by a new vector , are computed as , and therefore the respective wavefront values are given by .
4. Half Circular Harmonics
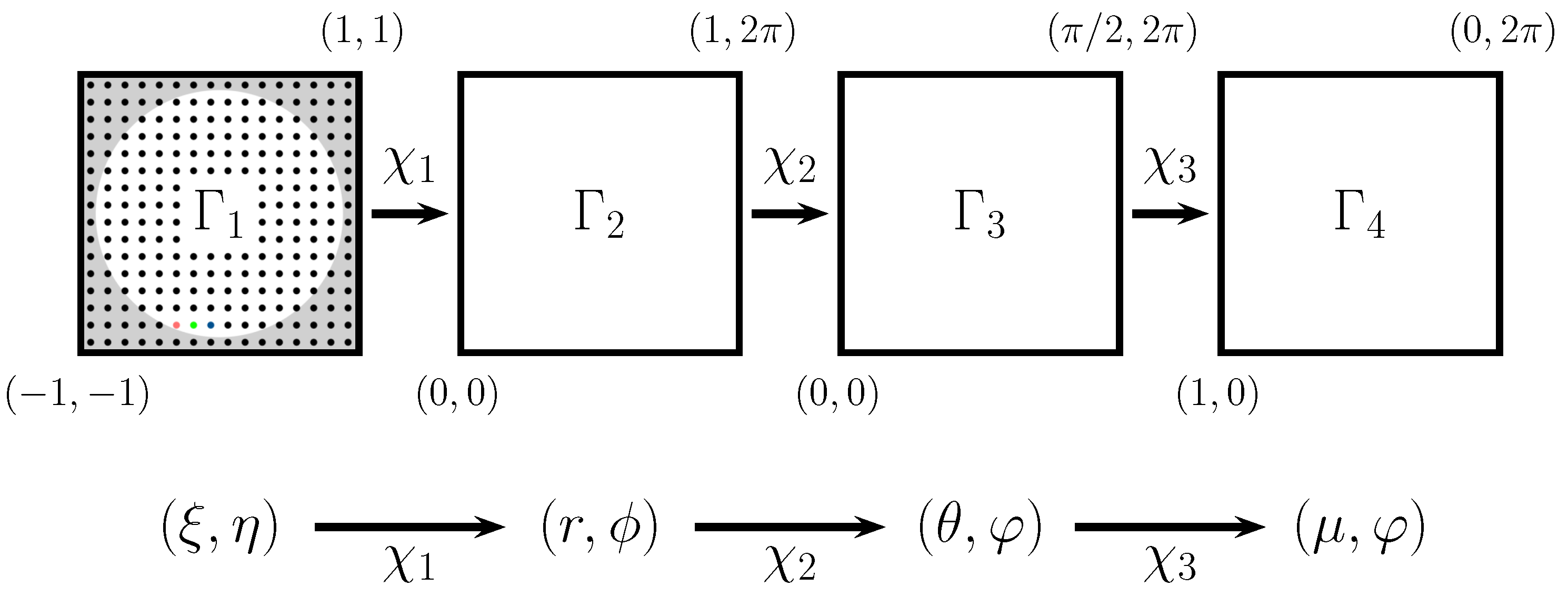
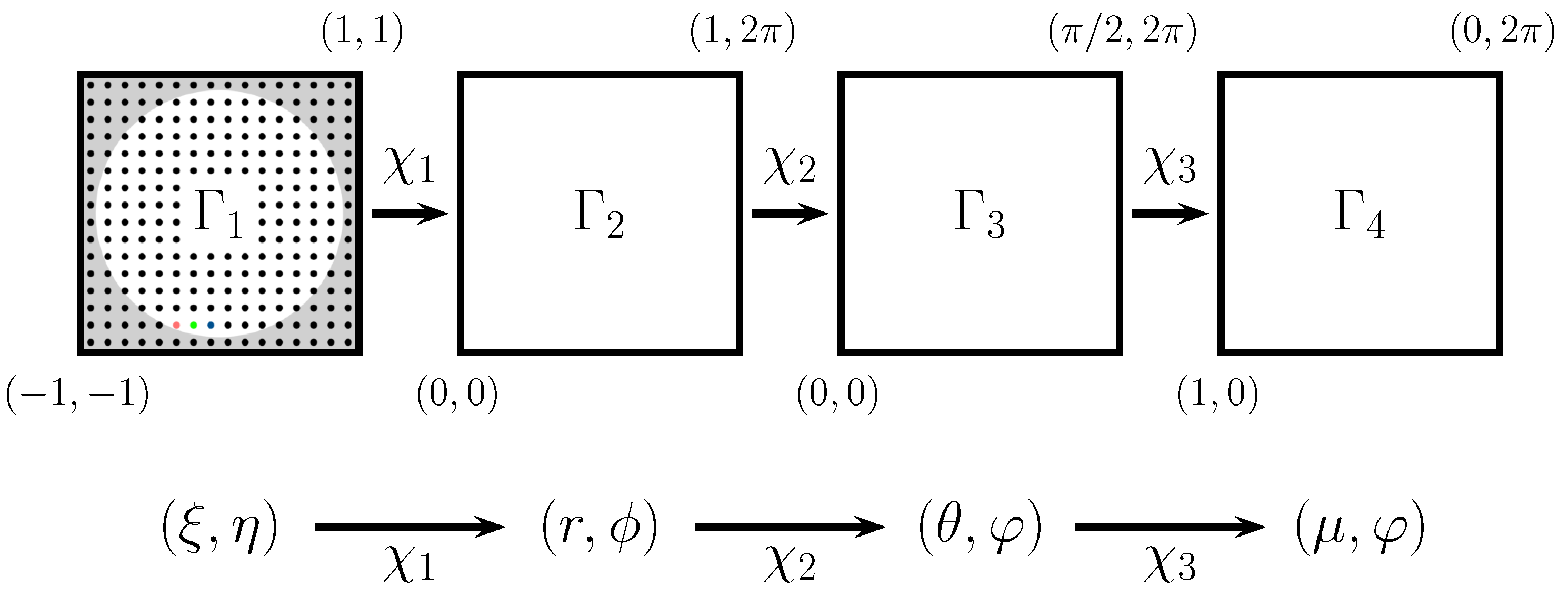
In this section, we describe the design and implementation of the new algorithm for reconstructing wavefronts using Spherical Harmonics as the orthogonal polynomial set mapped onto a circle. For this, we apply four consecutive mappings
,
,
, and
, which transforms the original coordinates until the coordinates are suitable for using half of the domain of the Spherical Harmonics (see
Figure 2). The complete mapping from
to
is given by
, and we will refer to this mapped basis set as Half Circular Harmonics.
To use the library, the user must provide its own implementation of , i.e., the library performs the map , and all their related transformations. The coordinates of the grid must be normalized, i.e., the spot centers need to have (which implies , , and ).
The simple direct and indirect maps
are given by:
thus the composite direct and indirect maps
are
For our purposes, we will also need the chain rule derivatives relative to the maps
and
, which are given by:
Since OpenWavefrontReconstructor uses the circular domain
, the user must re-scale the gradients using the chain rule (
18); here, we assume that the Cartesian coordinates inside
are known. In the rest of the section, we describe the OpenWavefrontReconstructor’s internal procedure to reconstruct a wavefront (or a surface) defined on the domain
.
The sensor should provide (possibly after applying the map
) the gradients of the wavefront of a finite set of points contained in
, which must be ordered into an array of the type
(see Equation (
5)). In the library, this ordering is performed by a function whose arguments are the following two array:
and
Here, the index
i is the ordering index, and
,
,
, and
are the minimum and maximum values of
x and
y (see
Figure 1b).
Internally, OpenWavefrontReconstructor assembles the matrix
(see Equation (
8)), applying the chain rules, Equation (
19), and using the pairs
. Subsequently, it solves the equation system (
10) for the coefficients of the expansion (see Equation (
7)). Afterwards, the user can retrieve the coefficients, request the wavefront reconstruction, and retrieve the values of the wavefront at the coordinates (
) (with which the matrix
was originally generated). For the latter, OpenWavefrontReconstructor internally applies the inverse map
to the coordinates and returns the wavefront, using Equation (
1), in the original coordinates
.
After the first reconstruction, the user may request additional reconstructions if the coordinates of the spots do not change (see
Section 3.3). This procedure would considerably decrease the computation time if the reconstruction is performed in a loop, which is quite common in adaptive optics, and in high-energy lasers production (especially in the so-called adaptive optics loop, which is a coupled system of a wavefront sensor and a deformable mirror, whose purpose is to correct aberrations originated during the production of the laser beams). After the first reconstruction (which requires assembling the matrix
, the singular value decompositon shown in Equation (
9), and generating the matrix
defined in Equation (
11)), the computational cost of subsequent reconstructions reduces to perform a matrix-vector product (i.e., the product
given in Equation (
11)).
Each term of the matrix (
) is of the form:
In Equation (
22),
n is the principal order of the Spherical Harmonics, and the ordering index
reproduces the following order:
,
,
,
,
,
OpenWavefrontReconstructor uses this convention. In addition, for the internal numerical computations of OpenWavefrontReconstructor, we implemented the Real Spherical Harmonics (or Tesseral Spherical Harmonics), and we use the following normalization convention:
5. Classical Zernike Decomposition
In the library, we implemented the classical Zernike polynomials to reconstruct wavefronts defined on circular domains [
11]. We provide this in order both to use this reconstruction as a benchmark (i.e., to measure the quality of the reconstruction using Half Circular Harmonics below) and to provide the user with well-known reconstruction methods.
Briefly, the Zernike polynomials are defined as
Here,
l and
m are nonnegative integers,
,
,
, and
is given by
In Equation (
26), it has been assumed, by definition, that
is even. If
is odd, then
, also by definition. For further details, the interested reader may consult, for instance, Ref. [
11].
Our implementation uses the Noll’s sequential indices [
16] for
, which reproduces the following sequence:
,
,
,
,
,
,
,
We will refer to the radial degree
l (see Equations (
3), (
25) and (
26)) as the principal order of the Zernike polynomials.
In version 1.0.0 of OpenWavefrontReconstructor, the user is responsible for renormalizing the focal spot coordinates, such that they are defined on circular domain whose radius is <1, which can be done using Equations (
12) and (
18).
Internally, OpenWavefrontReconstructor uses the same procedure as described in
Section 4, but exchanging the Half Circular Harmonics by Zernike polynomials of the form shown in Equation (
3).
6. Legendre Polynomials for Square and Rectangular Domains
To reconstruct wavefronts defined on square domains, in OpenWavefrontReconstructor, we implemented the classical Legendre polynomials as decribed by Equation (
2).
The user of OpenWavefrontReconstructor must provide a custom implementation of the scaling transformations, using Equations (
12) and (
18). The rest of the reconstruction procedure is carried out automatically, and there is no required order for the focal spot coordinates (see
Figure 1b).
Wavefronts defined on rectangular domains can also be reconstructed using the direct map
, i.e., Equations (
12) and (
18), which maps the rectangle into a unit square. The reconstruction would render the square wavefront, and the user would just use the inverse map
, i.e., Equation (
12), in order to recover the original coordinates. However, since the order in which the coordinates are arranged does not change during the reconstruction algorithms, the user does not need to recompute the original coordinates, but only associate the wavefront values through the index of the arrays (let us recall that the arrays are ordered, see Equations (
20) and (
21)).
Internally, OpenWavefrontReconstructor uses the same procedure as described in
Section 4, but replacing the Half Circular Harmonics by products of Legendre polynomials of the form shown in Equation (
2). The ordering index function,
, for this set reproduces the sequence
,
,
7. OpenWavefrontReconstructor Implementation Details
The source code of the herein described wavefront reconstruction algorithms has been made available for public download at [
20] under the GPLv2 license. The library OpenWavefrontReconstructor is written in C++ with a high degree of configuration, and it is aimed to facilitate future research in the field, as well as to provide a
ready-to-go framework for being used in control systems. The library contains the following capabilities:
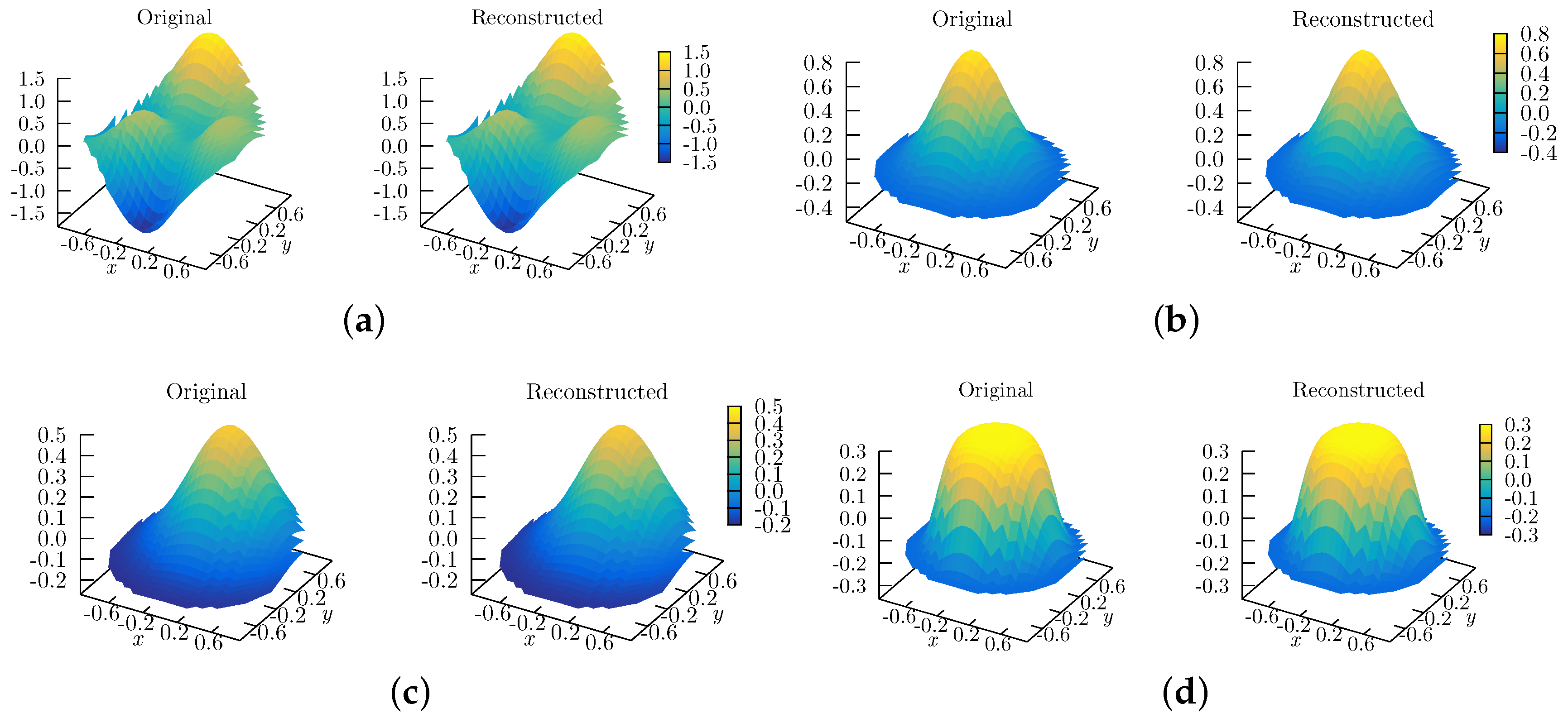
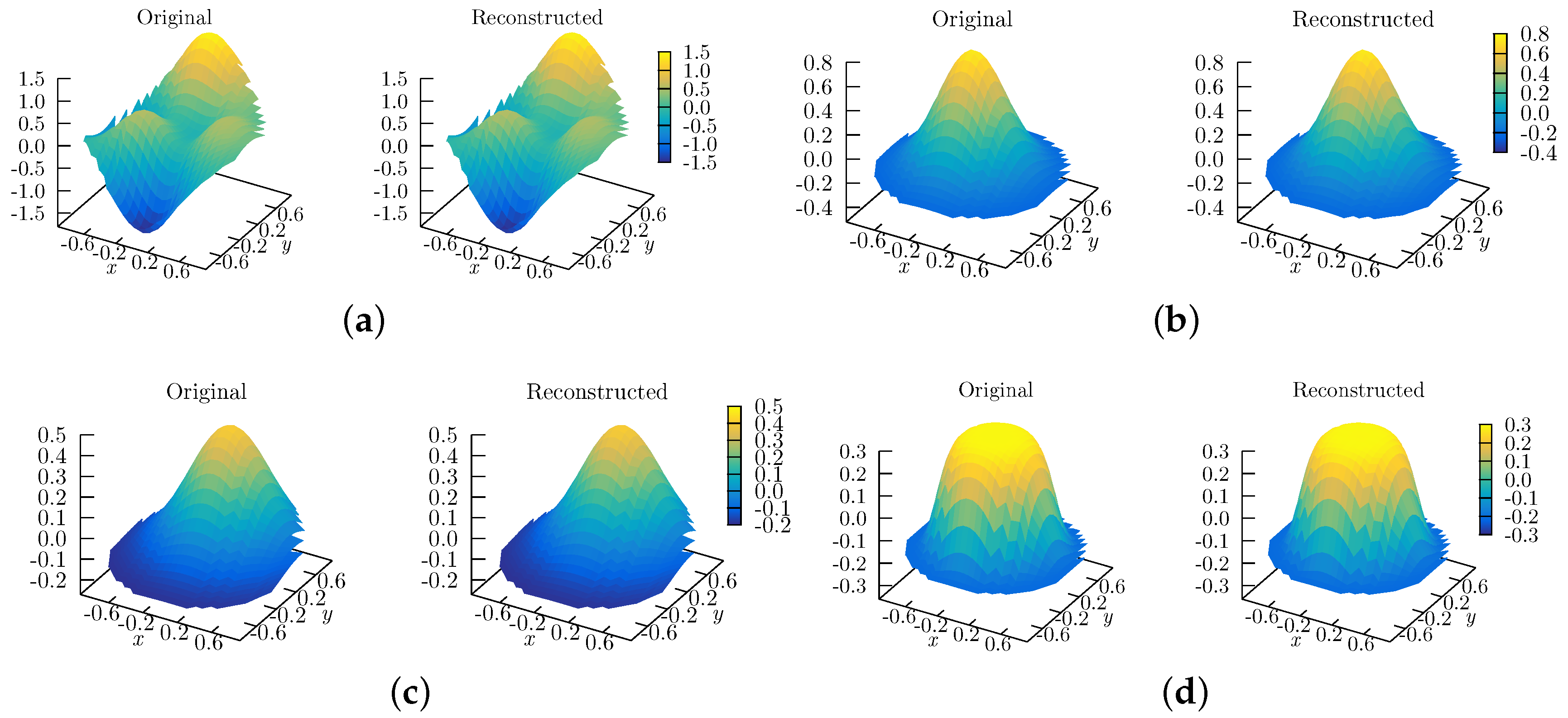
A mock-up generator of various types of incident wavefronts (see
Section 8.1 for specific functions).
Implementation of different wavefront reconstruction algorithms: Zernike polynomials and Half Circular Harmonics for circular domains, and Legendre polynomials for square domains.
Runtime selection of the linear algebra library to perform the algebraic computations
Time profiling of the linear algebraic operations (mainly the CPU time (
aka the process time) needed to generate the matrices
, and
defined in Equations (
8) and (
11), and also to record the time of the matrix-vector product for performing the operation described in Equation (
11)).
All software entities are fully decoupled, therefore OpenWavefrontReconstructor can be easily modified or extended. This also applies to the
class in charge of performing the algebraic computations. Additionally, porting the linear algebra functions to specific hardware architectures is part of our future work, which is aimed to decrease the CPU times below the millisecond for the operations associated with Equations (
10) and (
11). According to our experience, this will make the OpenWavefrontReconstructor an interesting option in control systems where the reconstruction is required to be nearly real-time, such as in the adaptive optics [
4,
14].
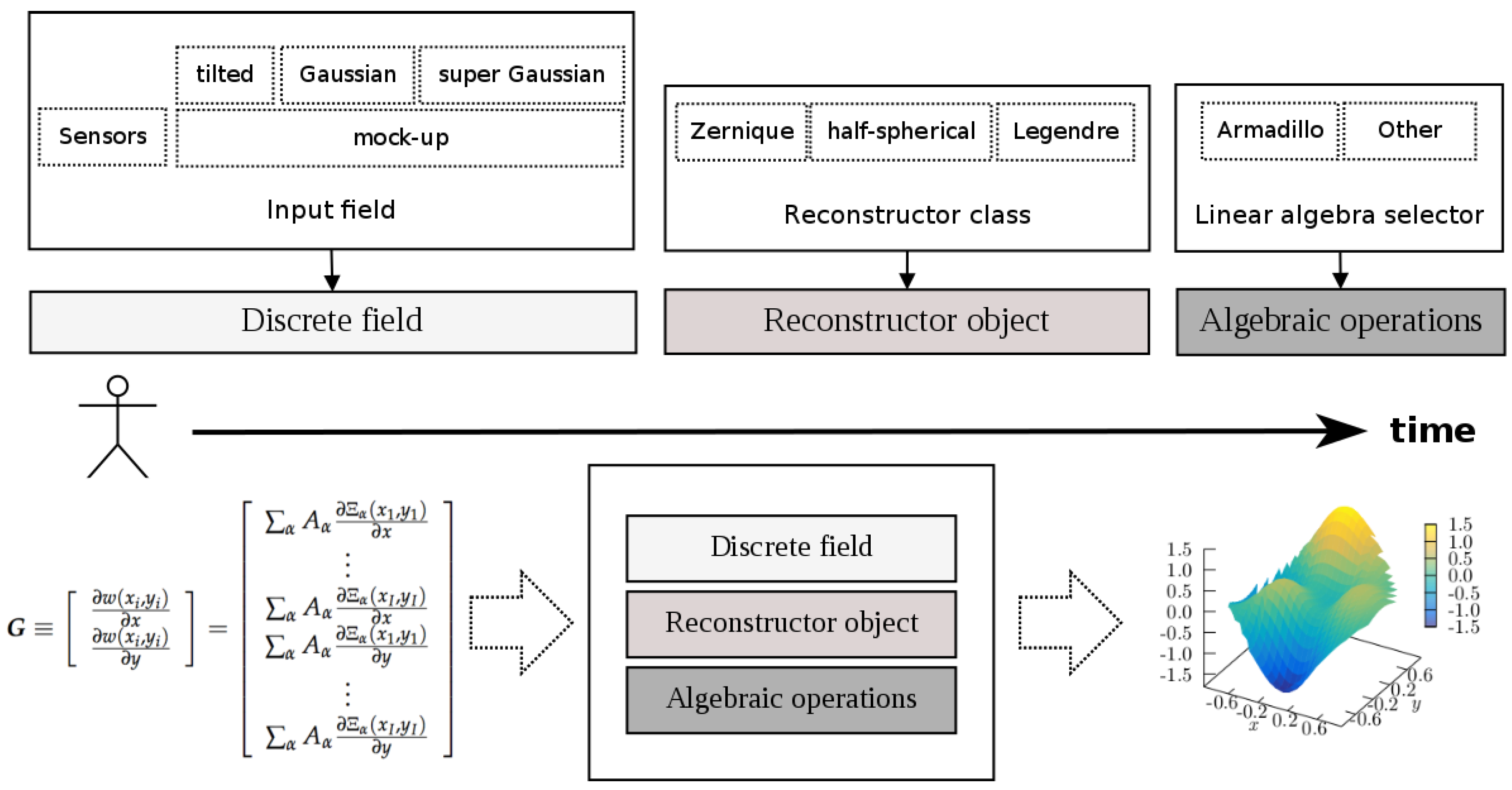
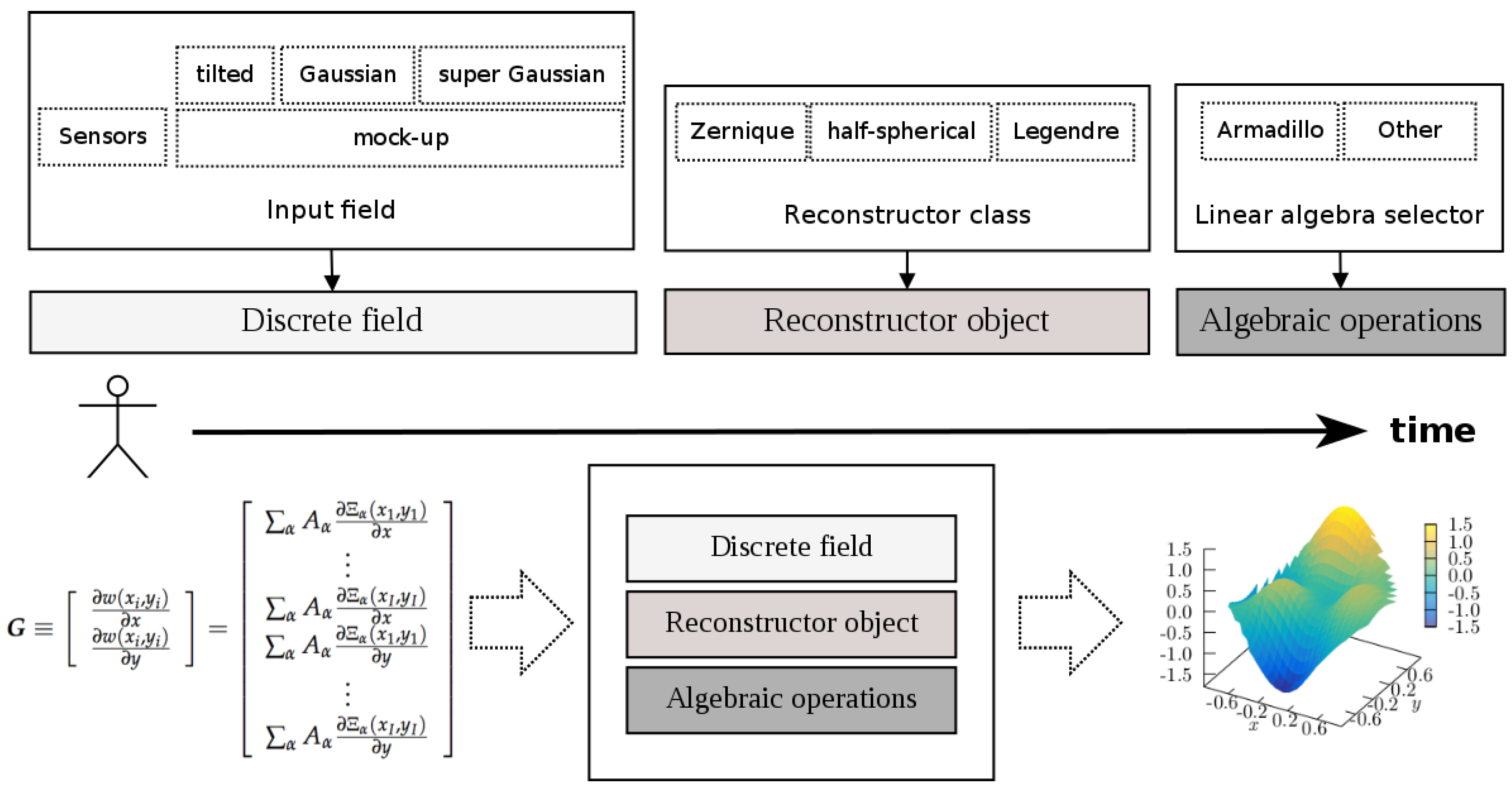
The diagram depicted in
Figure 3 provides the different options offered by the library, and it shows a typical work flow that can be described as follows:
The user can choose the input wavefront as a simulated optical field generated by the mock-up generator, or as a direct input from a sensor. Usually, the sensor vendors provide libraries that can be used to retrieve information such as the focal spots coordinates, wher the slopes are measured, and obviously these also provide the slopes. These coordinates and slopes are the inputs received by OpenWavefrontReconstructor, and are used to configure the matrices
and
defined by Equations (
8) and (
11).
Similarly, the user can choose the particular algorithm that will perform the wavefront reconstruction, which can be instantiated as an object from the available classes representing the different approaches (see the previous enumeration list—item 2—for the list of available polynomials).
Finally, the user can also select, at runtime, the linear algebra library to perform the linear algebraic operations. In version 1.0.0 of OpenWavefrontReconstructor, only the armadillo library is merged in the code; however, we plan to include more options, and the user can also implement the libraries of his/her preference. OpenWavefrontReconstructor’s design is intended to provide an easy-to-follow (nearly copy-paste) environment to implement new linear algebra libraries.
9. Conclusions
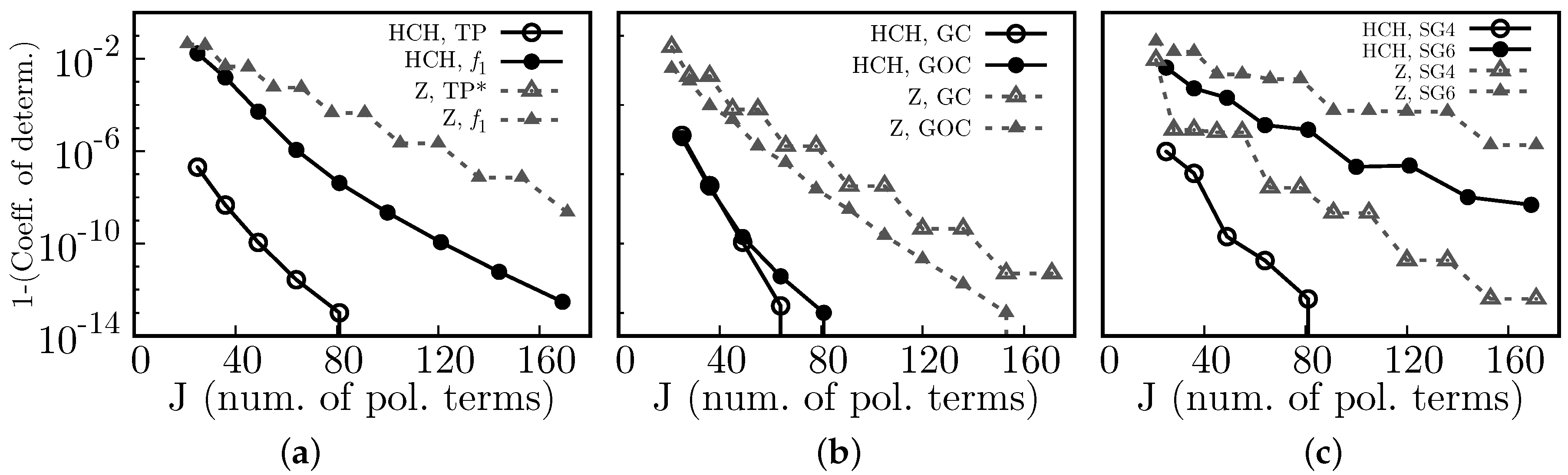
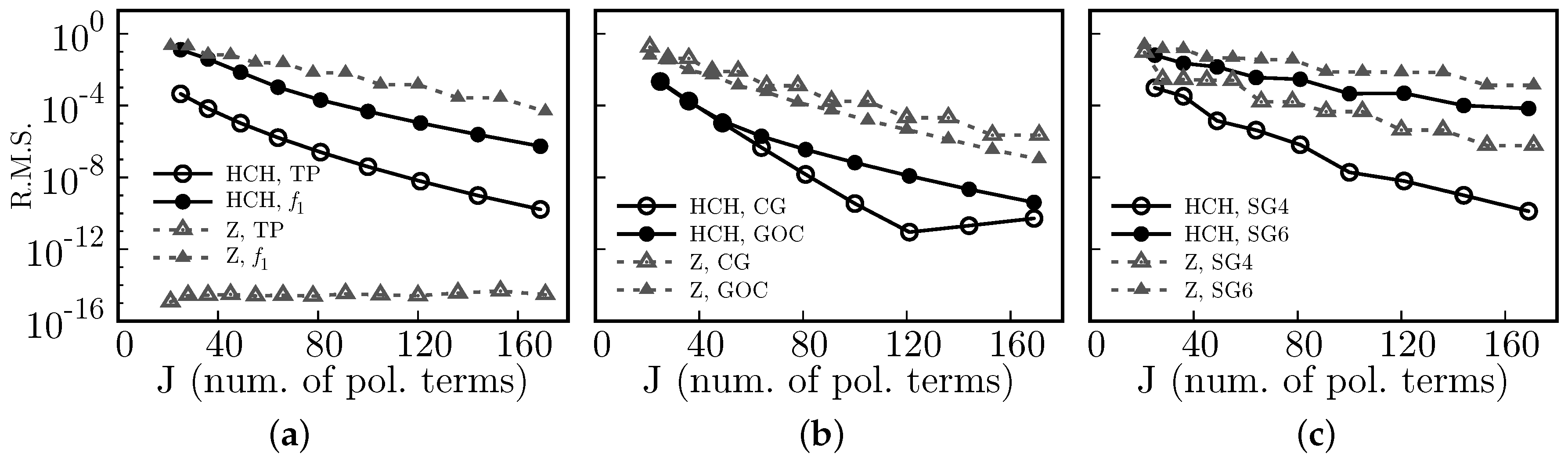
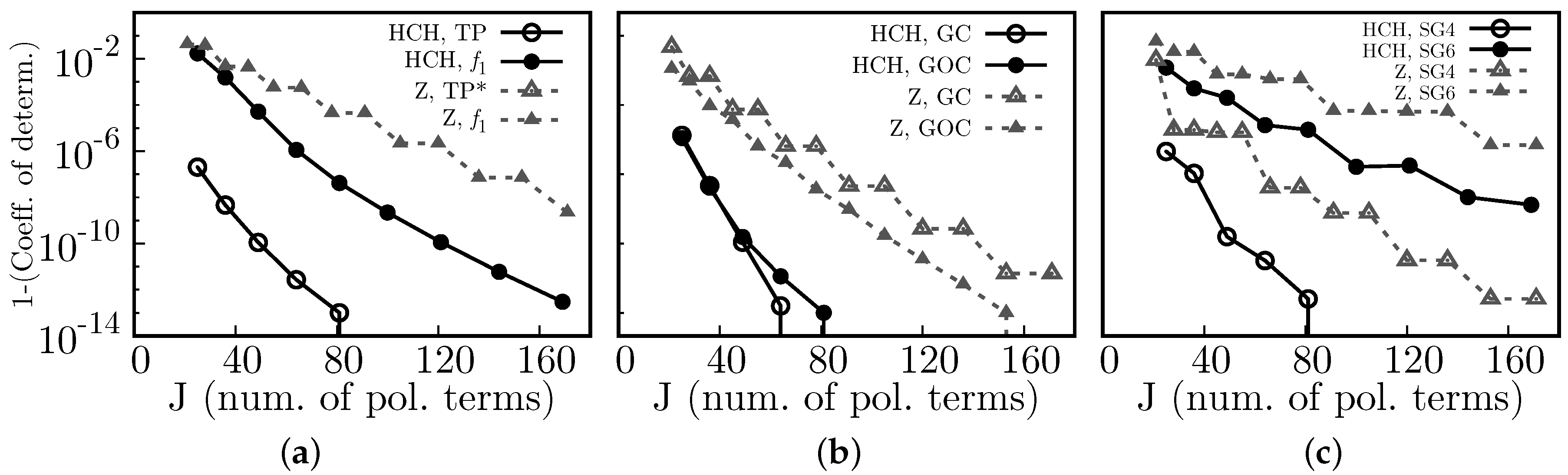
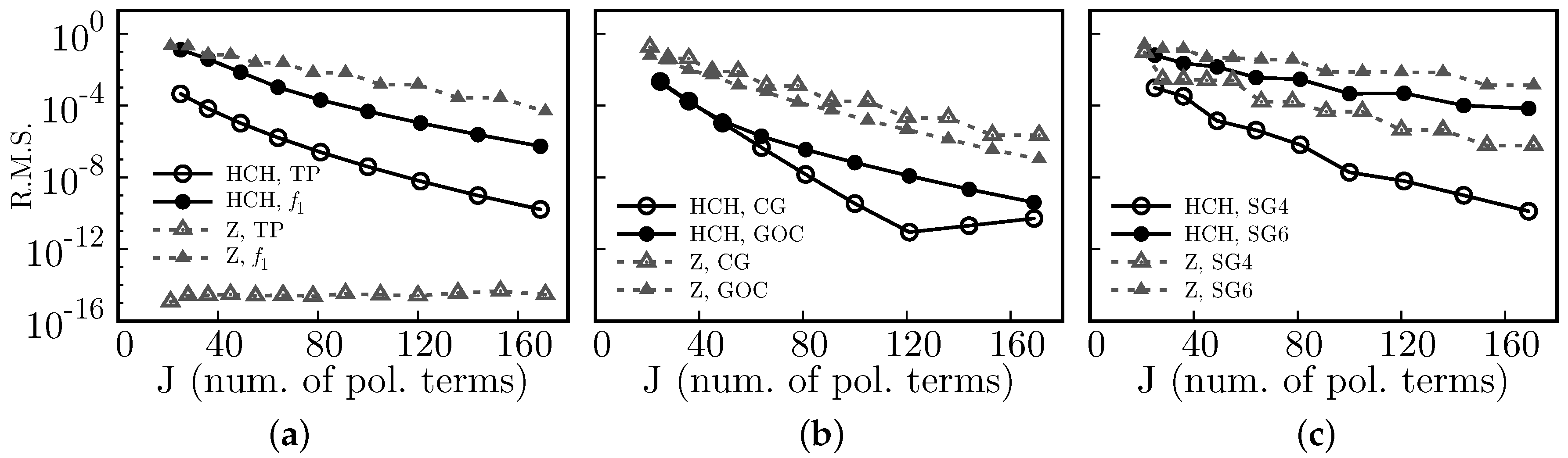
We proposed a new algorithm to reconstruct wavefronts, and more generally surfaces, from gradients using the Spherical Harmonics mapped to work for unit circle domains, which we call Half Circular Harmonics. Relative to the use of classical Zernike polynomials, the same numerical accuracy can be obtained using ∼1/2 to 2/3 the number of polynomial terms. This might decrease the computational time spent to reconstruct wavefronts from slopes, which may be of interest to designers and manufacturers of wavefront sensors.
Additionally, we implemented the proposed reconstruction algorithm in a library (OpenWavefrontReconstructor) released to the public under the GPLv2 license terms. The library is designed to be used as a part of the wavefront sensors software, hence, in addition to the new polynomials (i.e., the Half Circular Harmonics), we also provide an implementation for reconstructing wavefronts, defined on a unit circle, using the classical Zernike polynomials. On the other hand, for square domains, we implemented the classical Legendre polynomials. Currently, OpenWavefrontReconstructor uses the linear algebra library armadillo to perform the matrix operations; however, its design is intended to provide an easy-to-follow (nearly copy-paste) environment to implement new linear algebra libraries. Futher additions to the library are planned as well, such as coupling other linear algebra libraries and additional polynomial sets for square domains. Finally, we also plan to port OpenWavefrontReconstructor to specific massively paralell hardware architectures, in order to decrease the reconstruction computing time.



 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}