Model-Based Heterogeneous Data Fusion for Reliable Force Estimation in Dynamic Structures under Uncertainties

Abstract
:1. Introduction
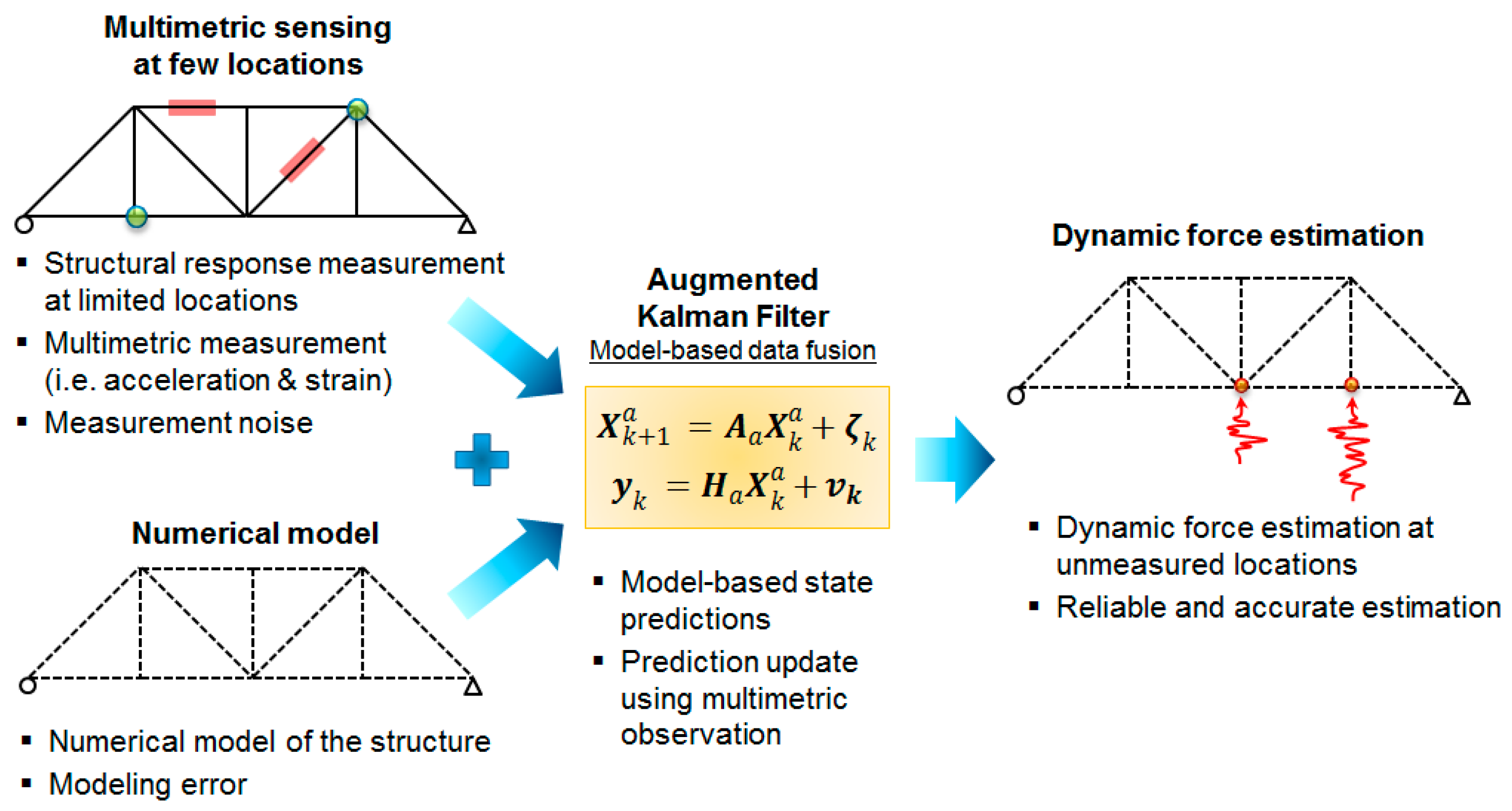
2. Augmented Kalman Filter A
2.1. State Space Model
2.2. Kalman Filter
2.3. Augmented Kalman Filter (AKF)
2.4. AKF Update via Multi-Metric Observation
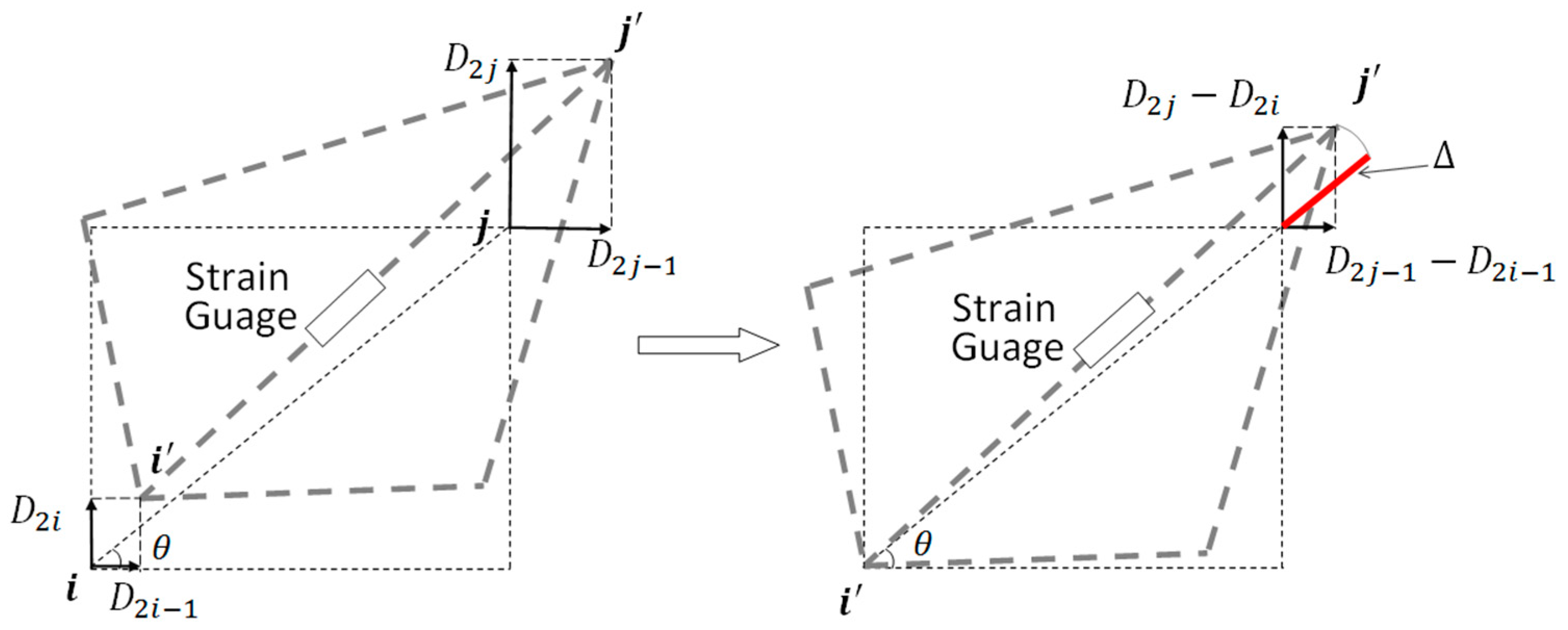
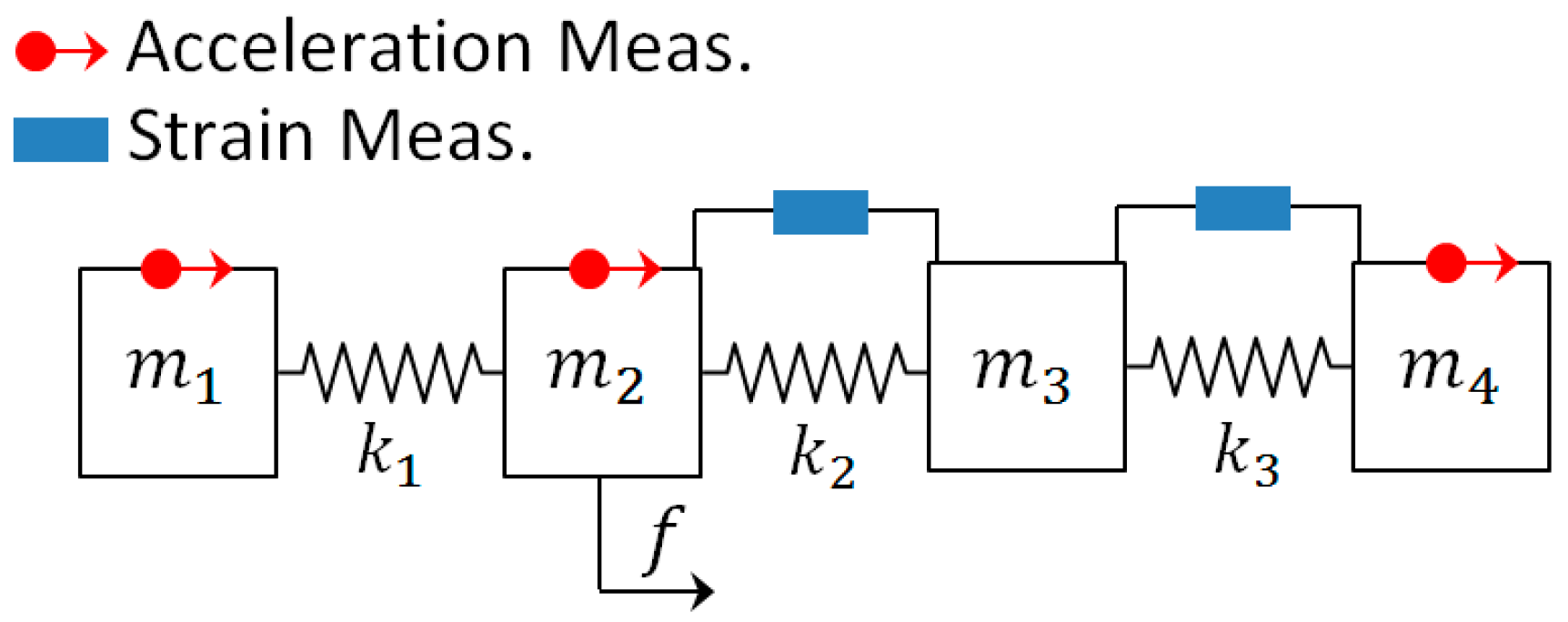
2.5. Strain Selection Matrix for Planar Truss
2.6. Strain Selection Matrix for Planar Truss
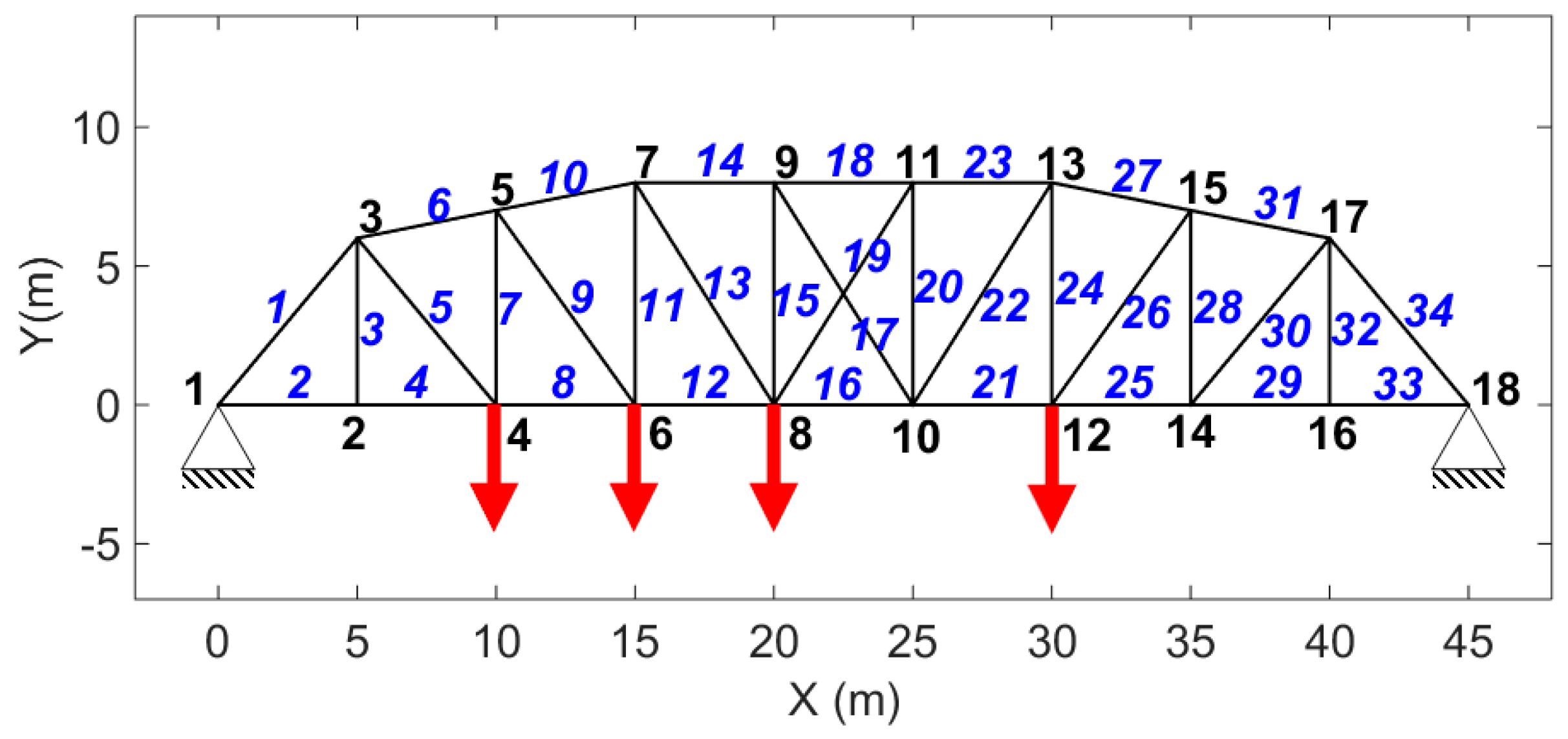
3. Simulations and Results
- -
- Only acceleration measurements are used.
- -
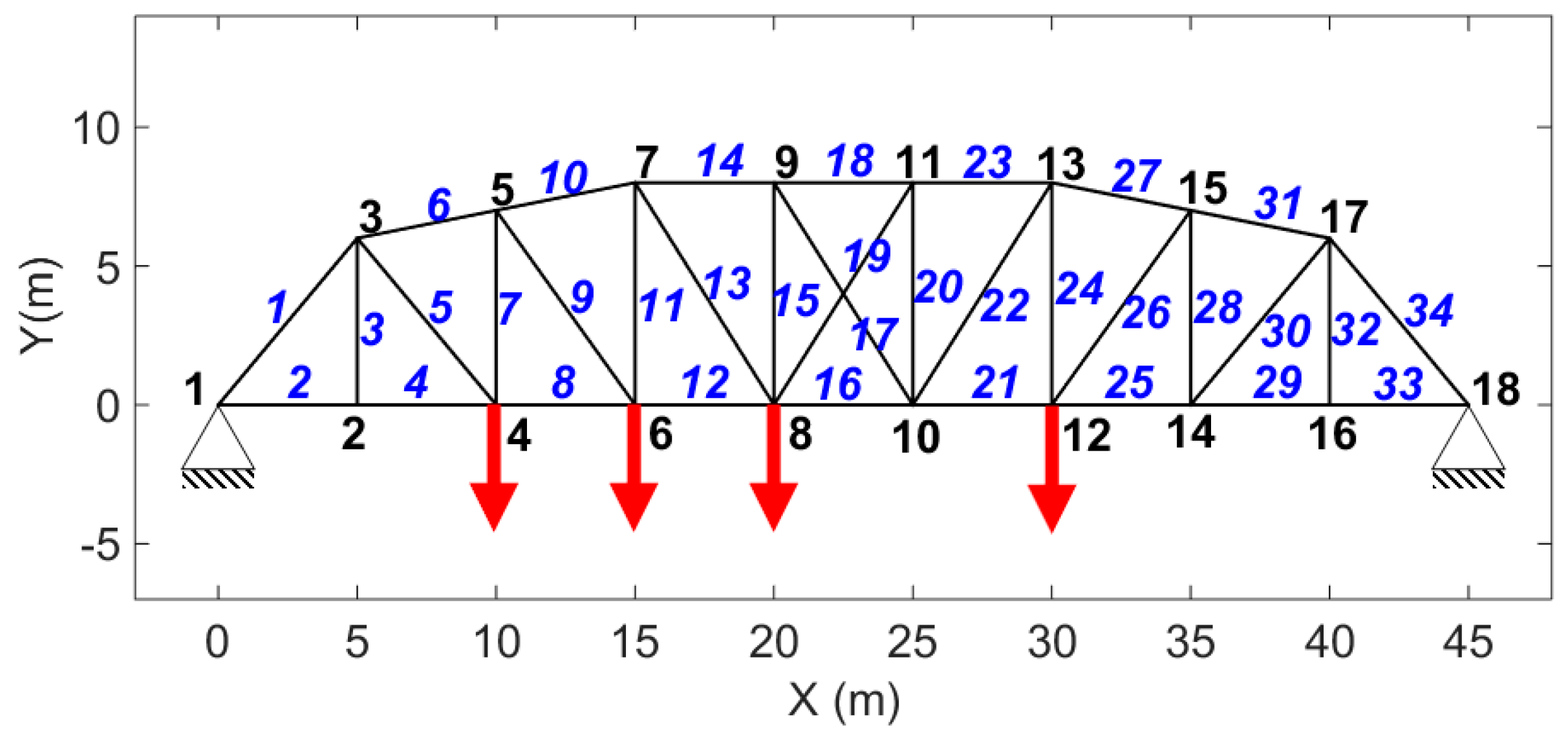
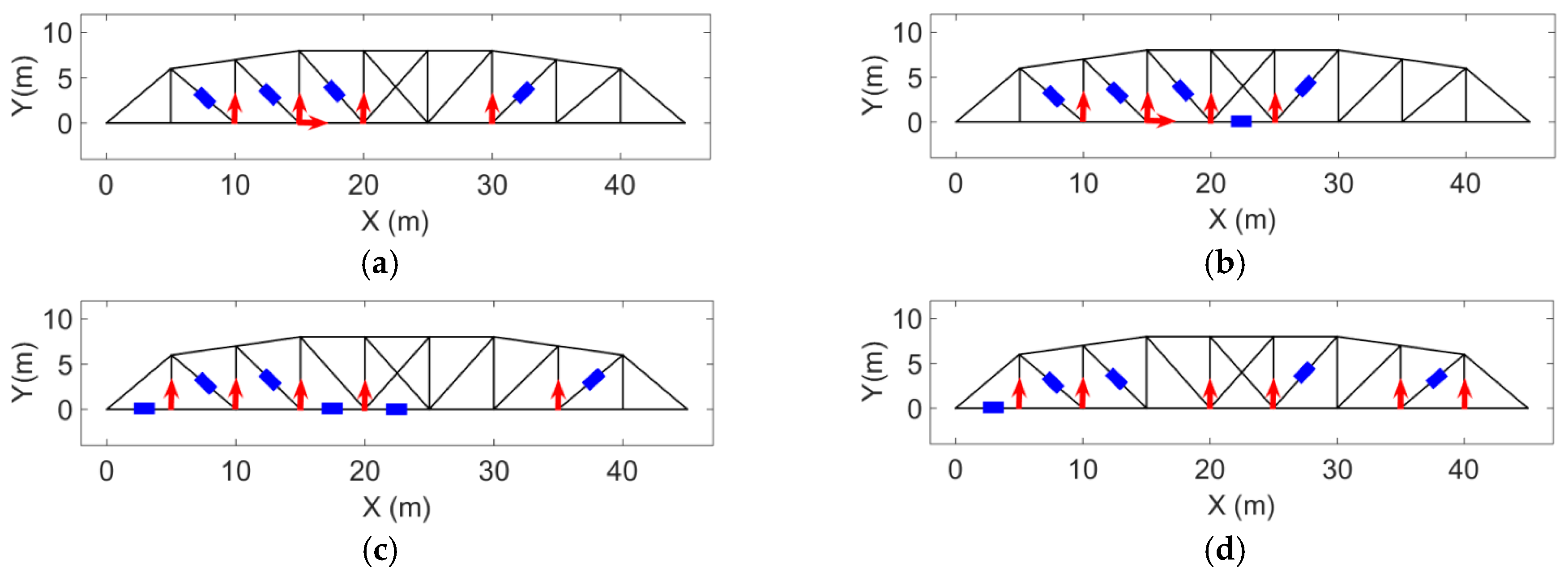
- System is subjected to random excitations (vertical direction at joints “4”, “8”, and “12”) and impulse applied in the vertical direction of joint “6”.
- -
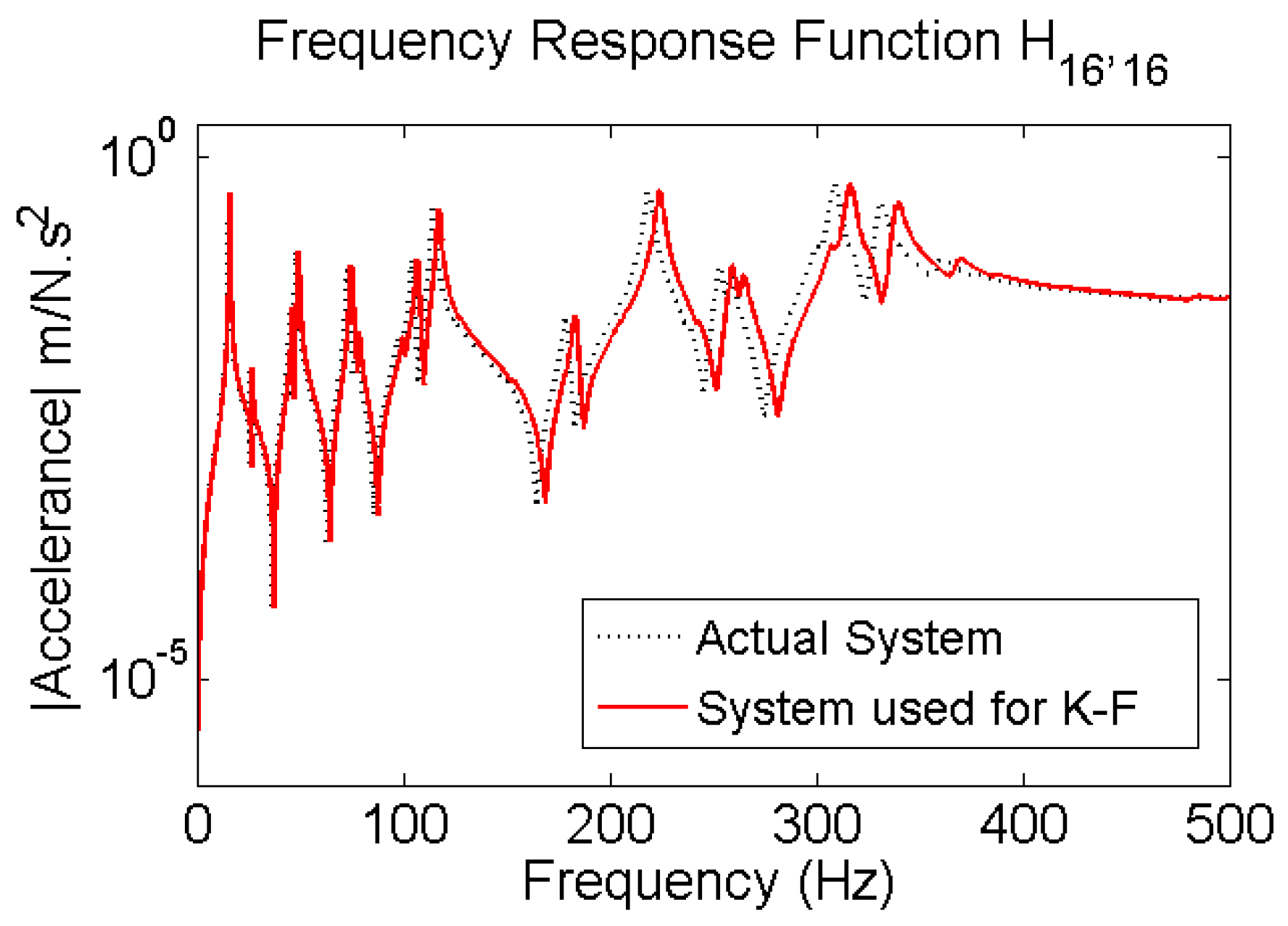
- Regarding presence of noise and modeling errors, two cases are considered: i) without modeling error and measurement noise and ii) with modeling error (5%) and measurement noise (2%).
- -
- Another case that only acceleration measurements are used.
- -
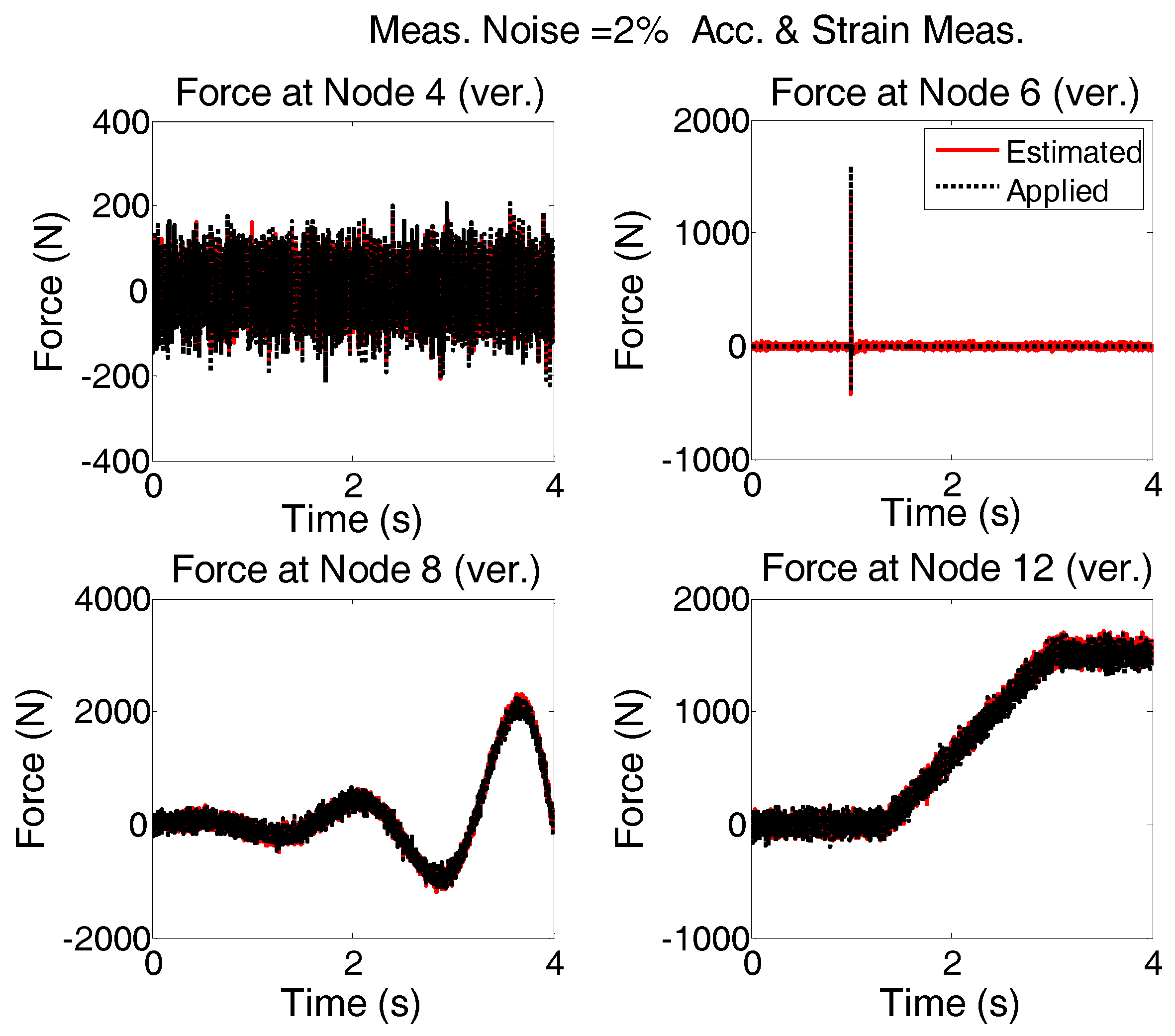
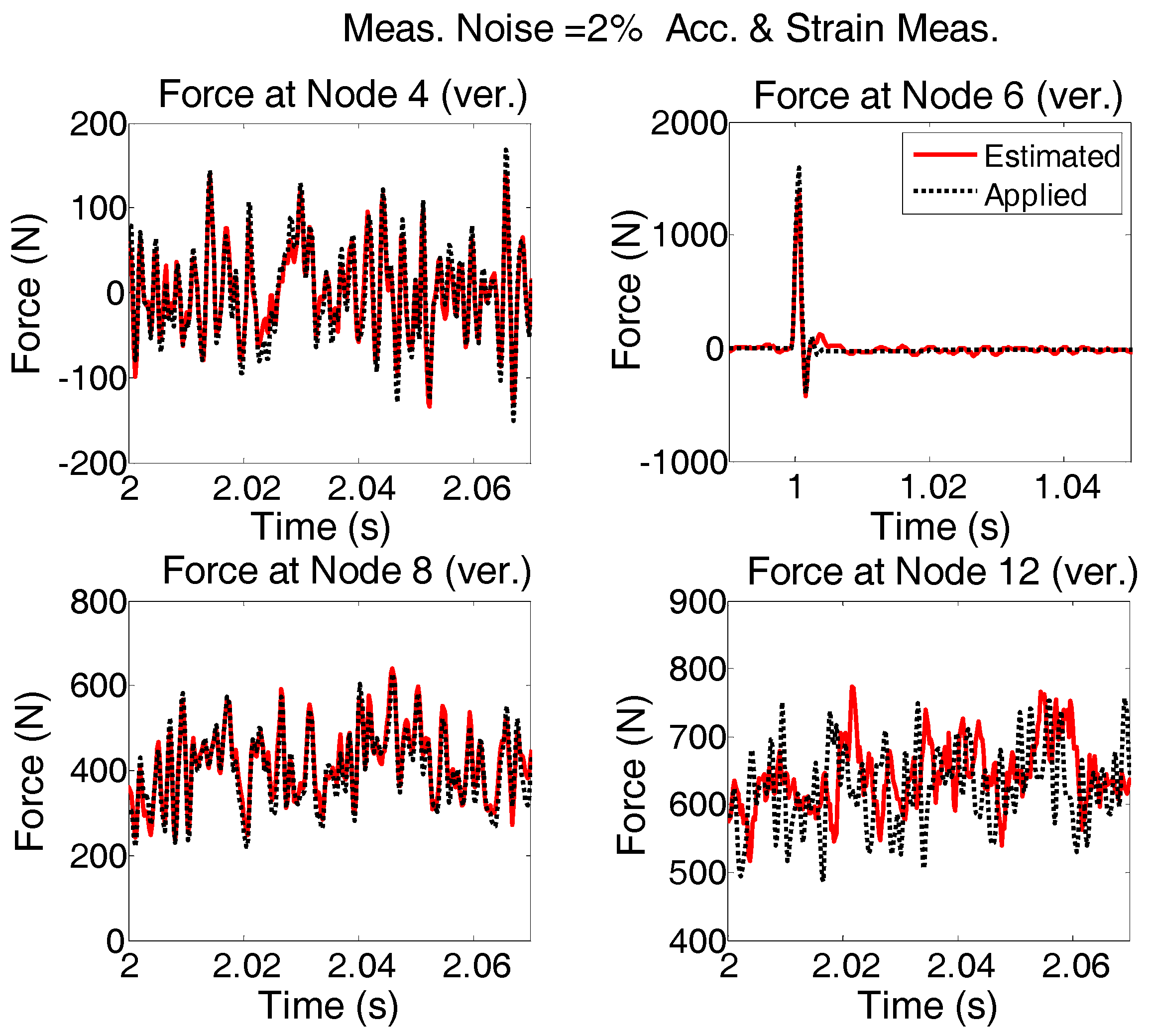
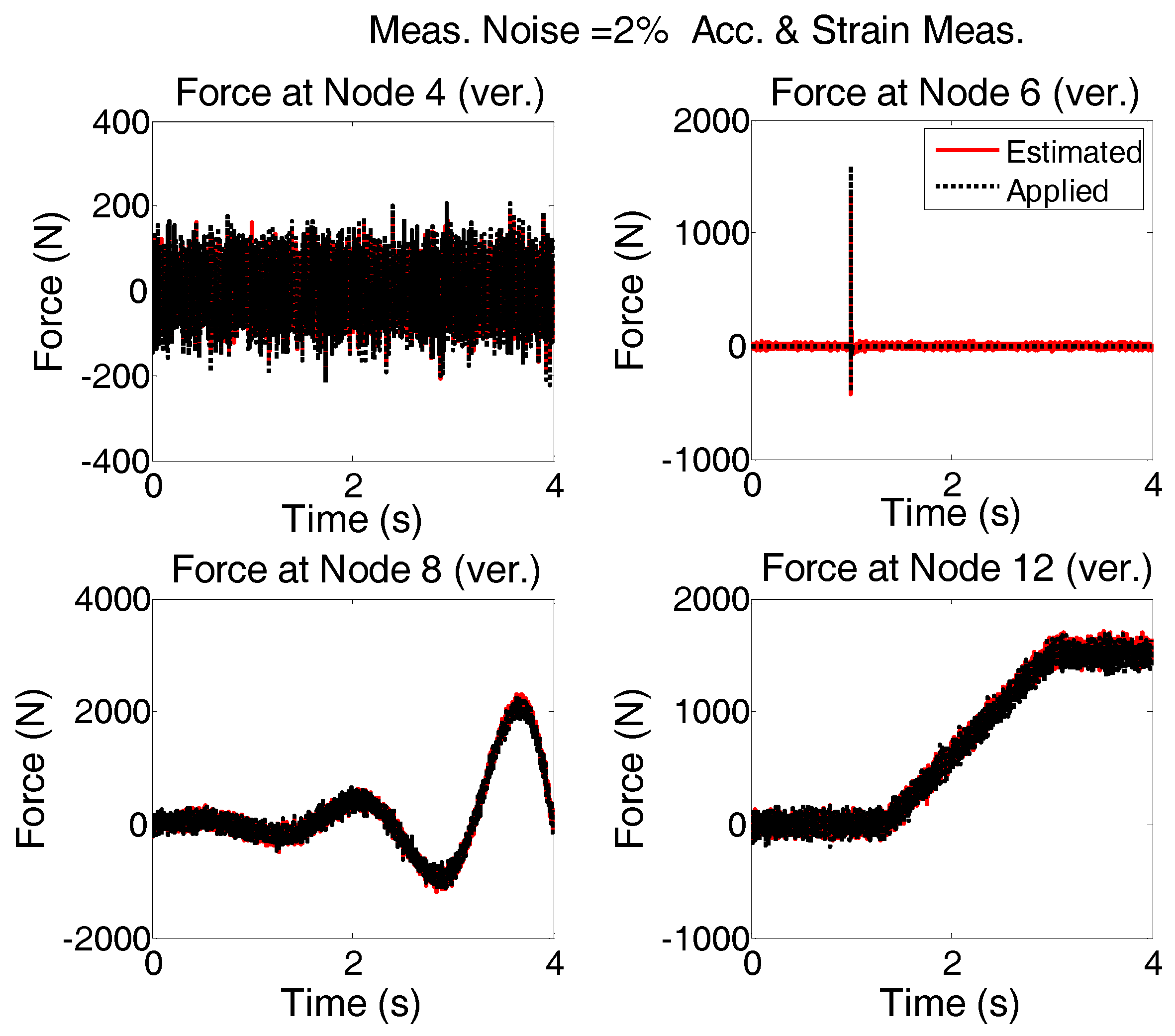
- But, different forces are simultaneously applied at four nodes in vertical direction. Random (vertical direction of Joint “4”), impulsive (vertical direction of Joint “6”), random + low varying high amplitude (vertical direction of Joint “8”), noise + ramp shape (vertical direction of Joint “12”).
- -
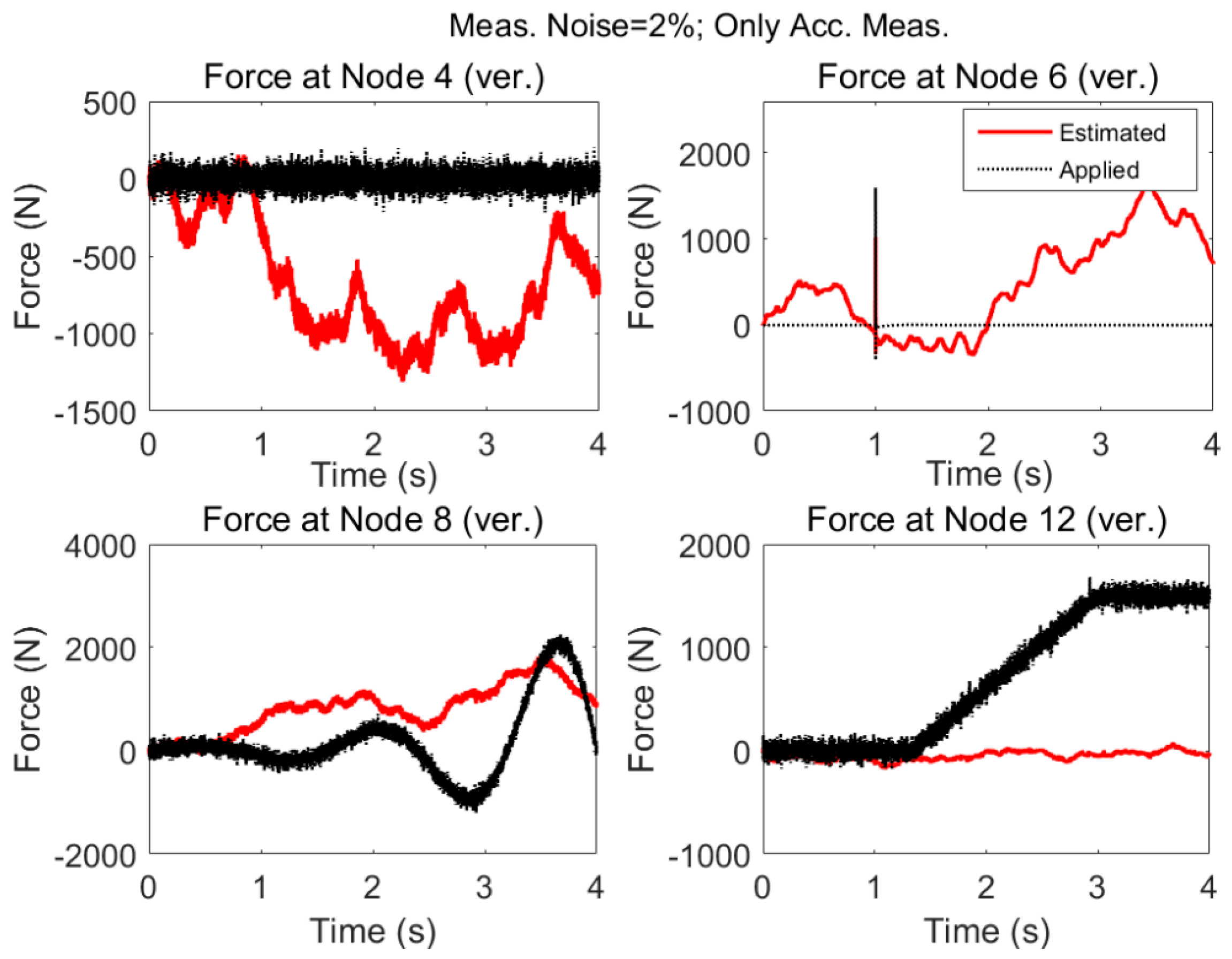
- Whether errors are available or not, two cases are considered: (i) without modeling error and measurement noise and (ii) with them where the results are again unstable as in case 1 when noise was considered.
- -
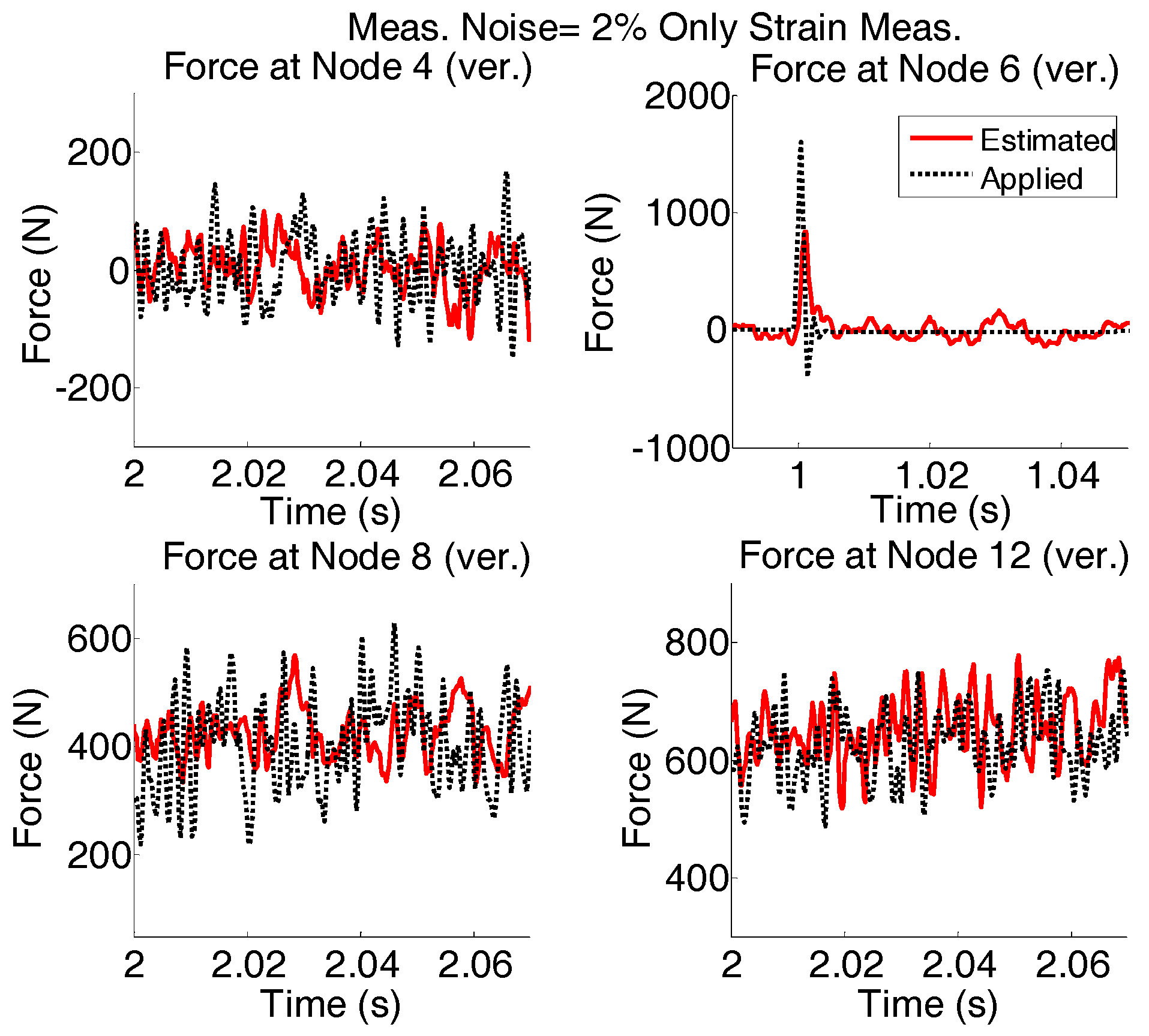
- The case that only strain measurements are used.
- -
- Loading condition is the same as Case 2
- -
- Modeling errors and measurement noises are considered.
- -
- The case that both acceleration and strain measurements are used.
- -
- Loading condition is the same as Case 2
- -
- Modeling errors and measurement noises are considered.
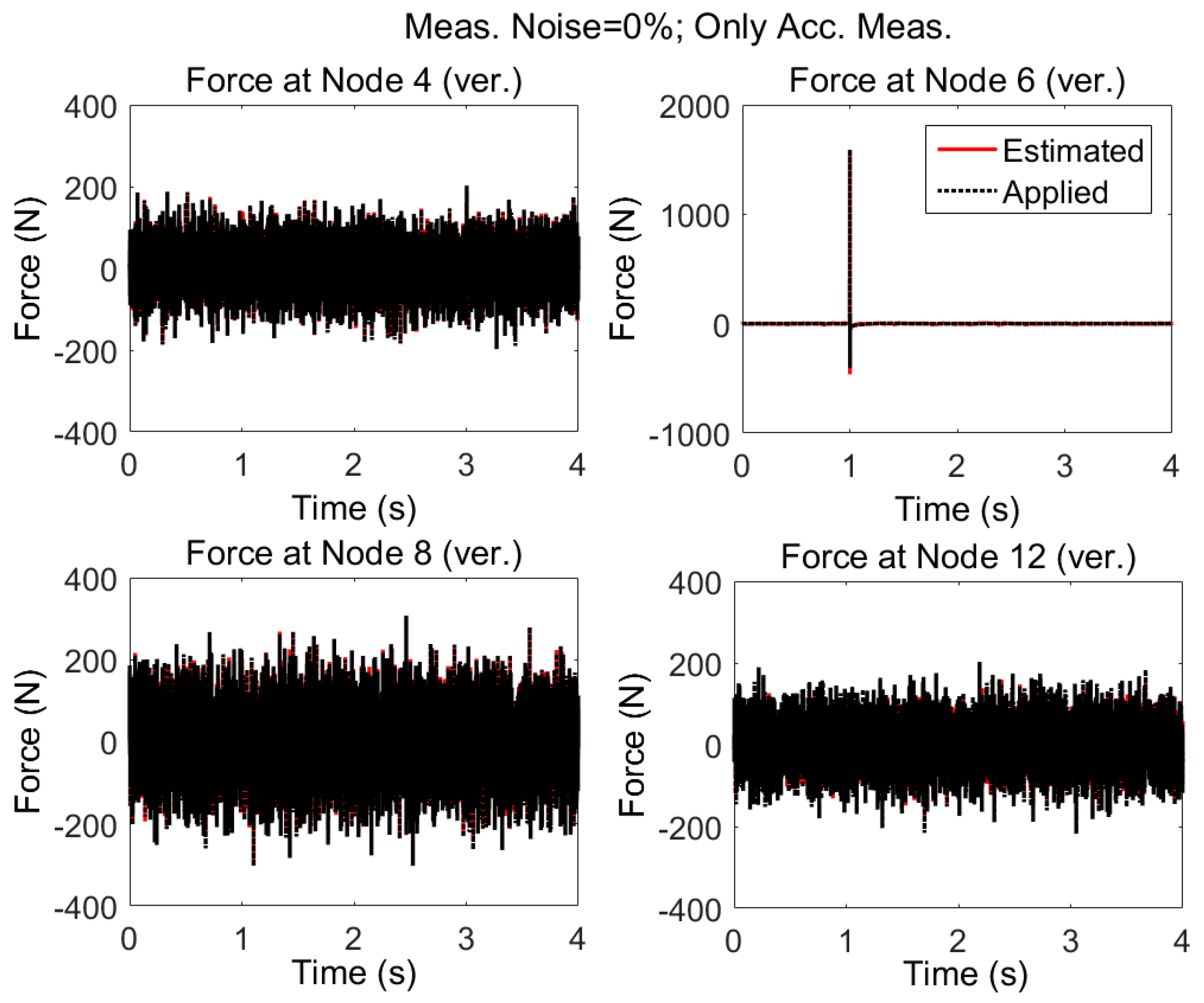
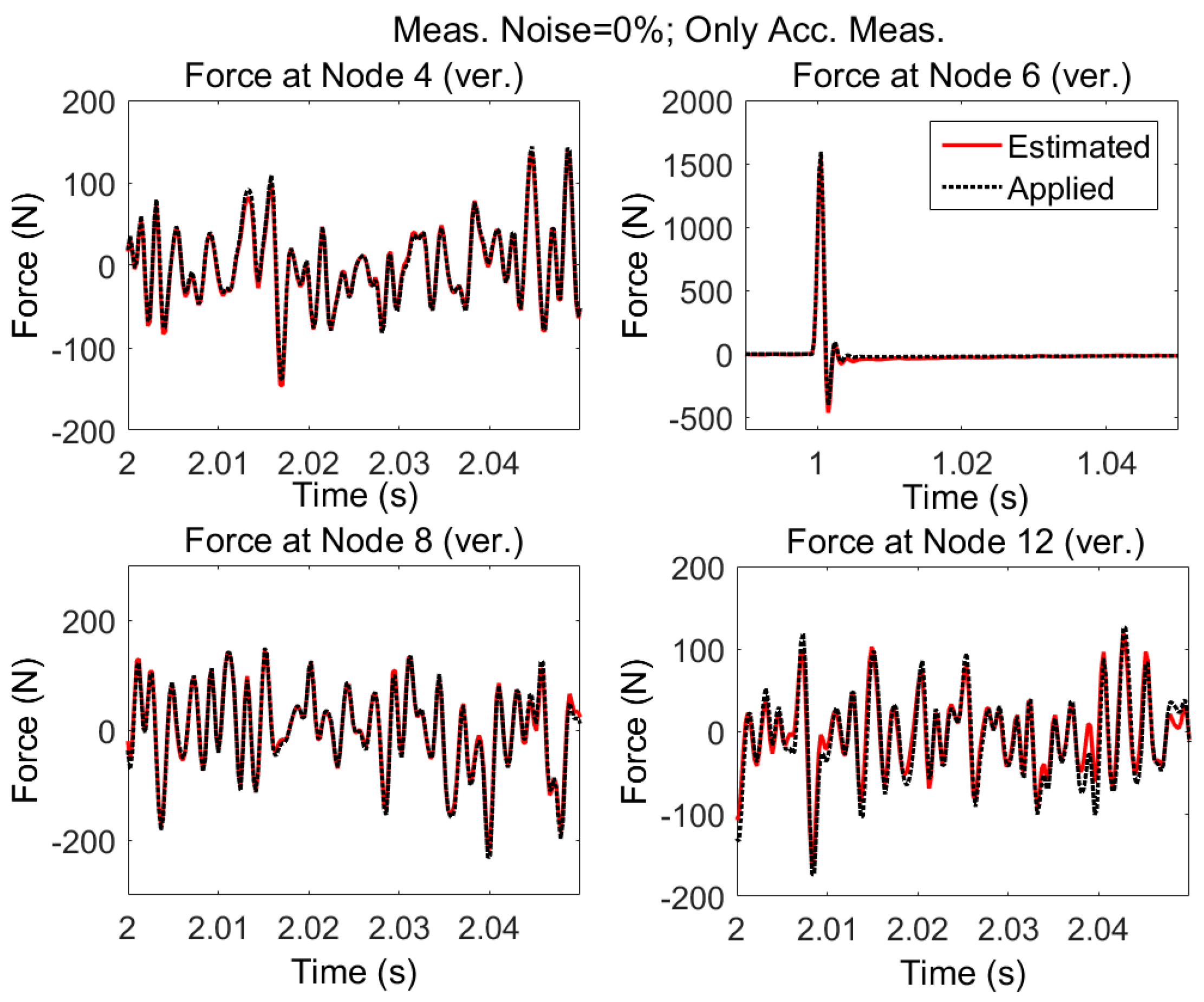
3.1. Case 1: Acceleration Measurements Only—Random and Impulsive Excitation
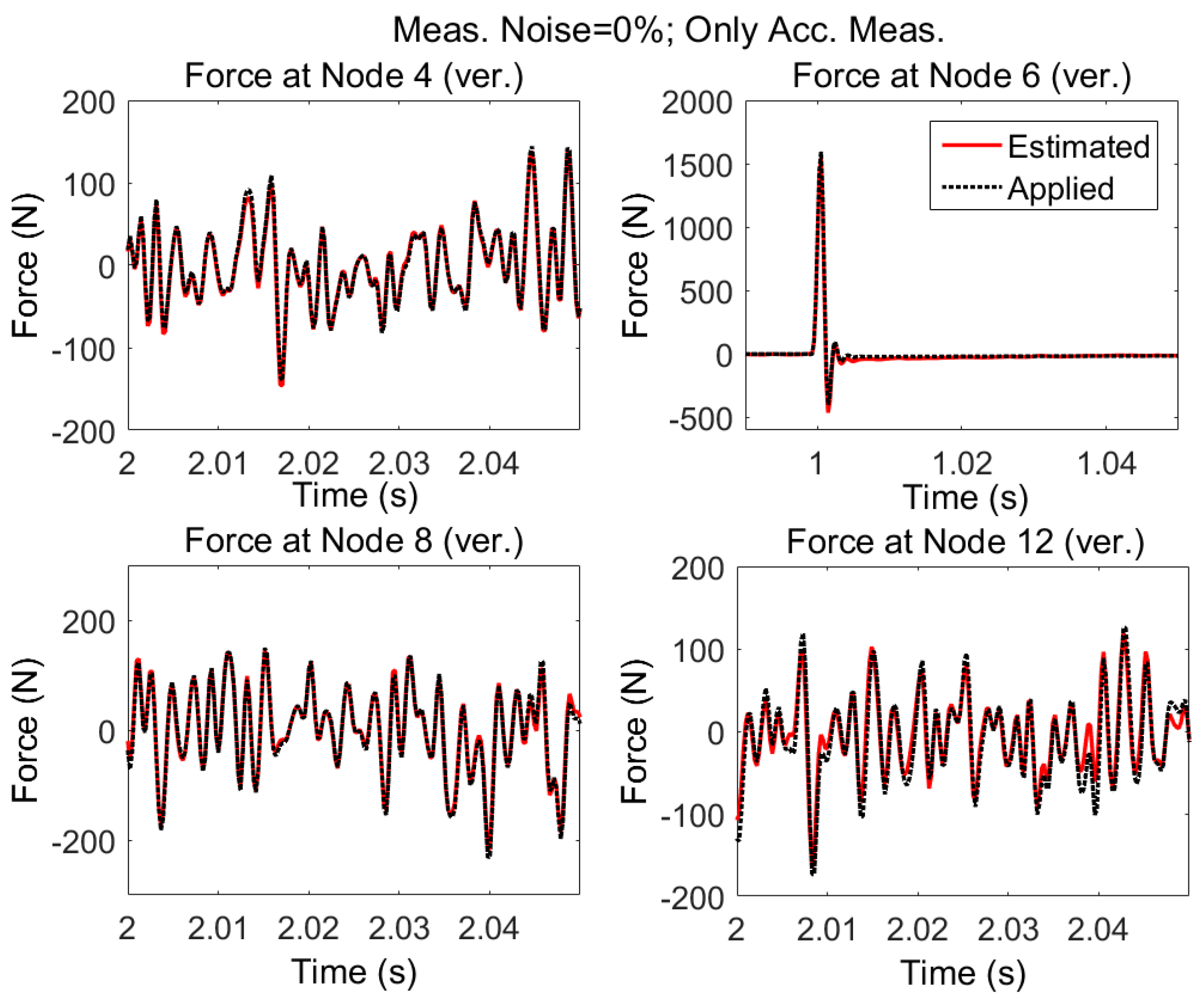
3.1.1. No Modeling and Error, No Measurement Noise
- 1)
- there is no measurement noise and modeling error, and
- 2)
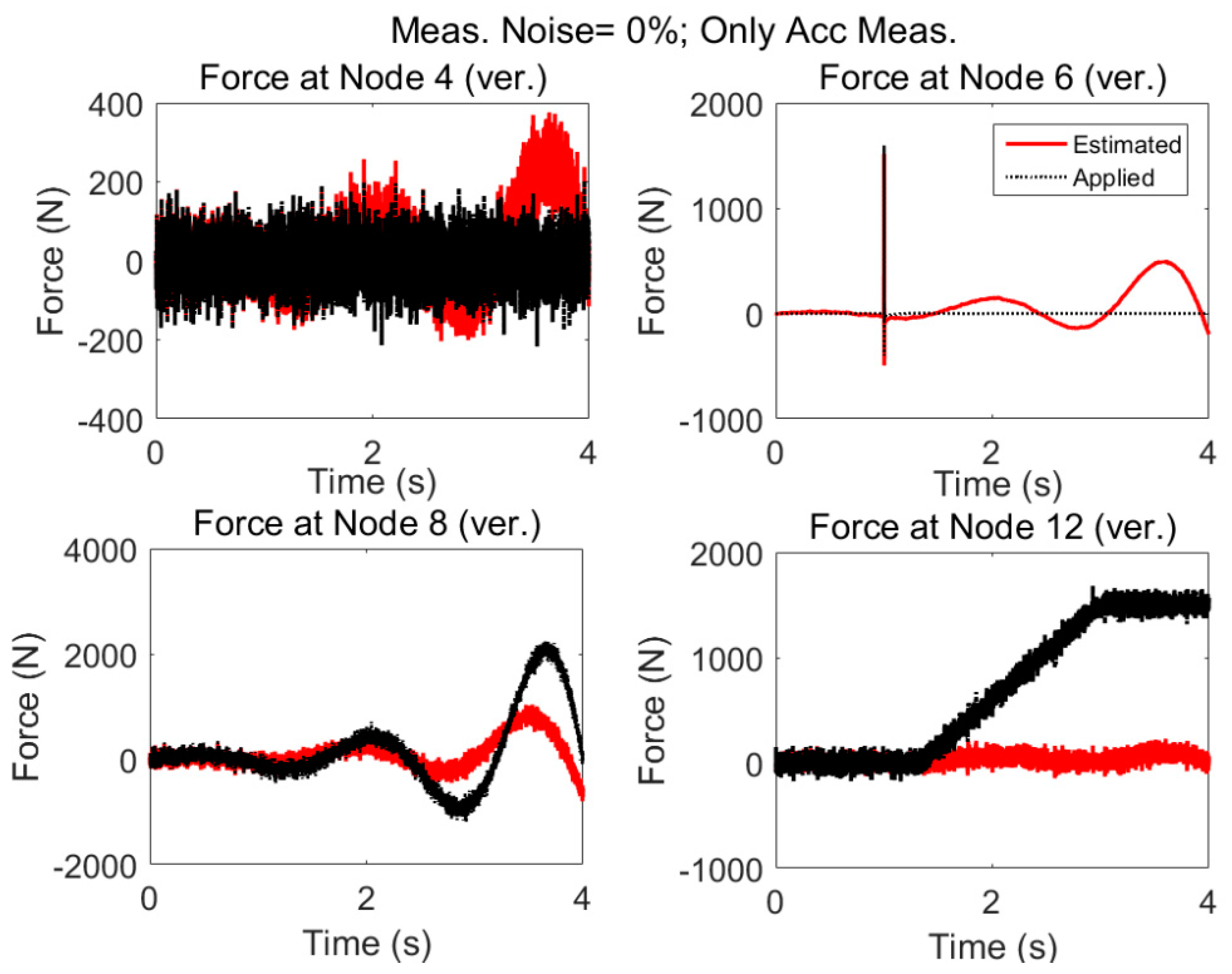
- the structure is subjected to random zero mean and impulsive forces, Then, even when forces are applied simultaneously at different locations of the structure, it is possible to estimate the input loading reliably. However, assuming no measurement errors and no discrepancy between the dynamic response of model and the real structure is too far from reality.
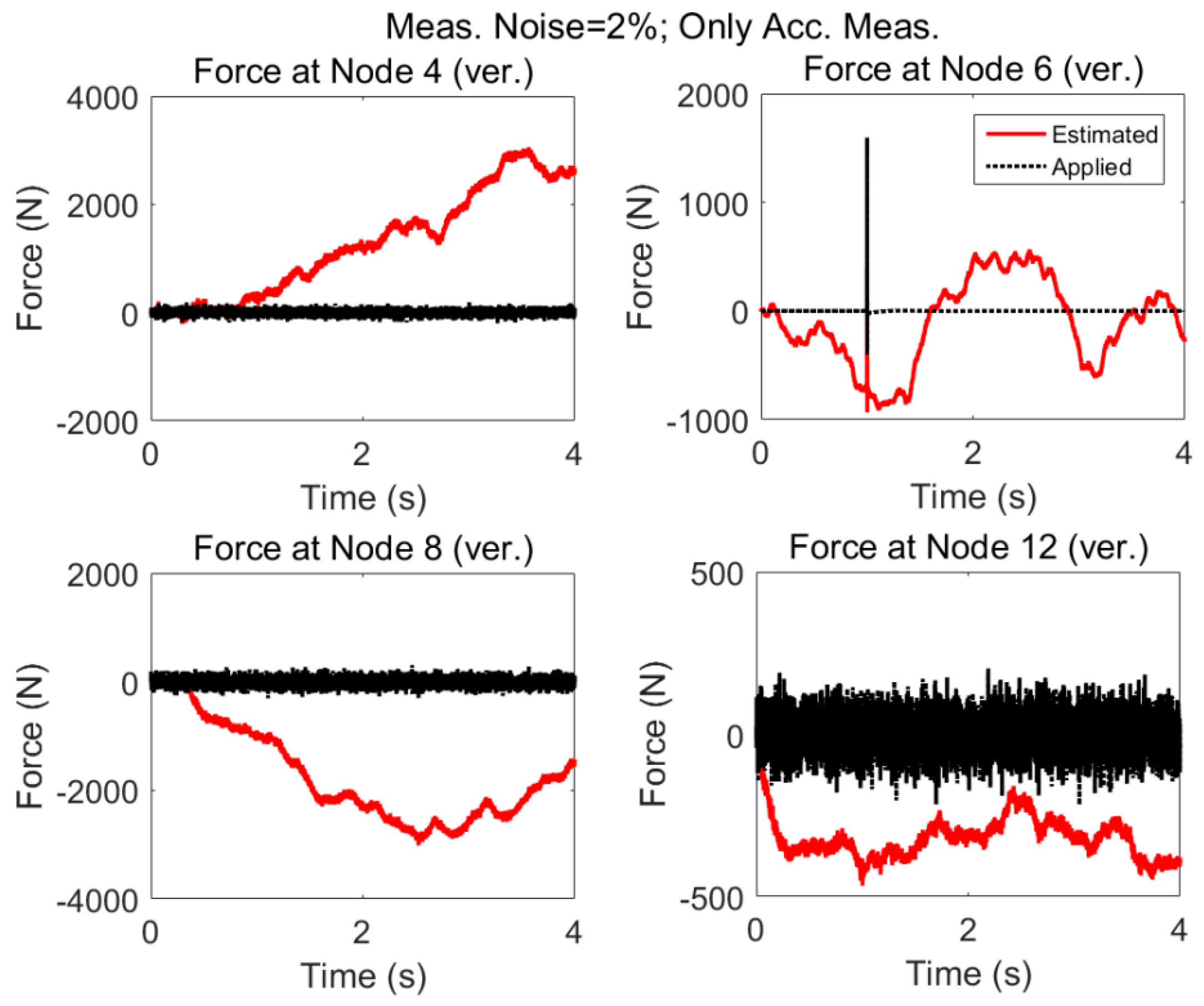
3.1.2. Modeling Error (5%) and Measurement Noise (2%)
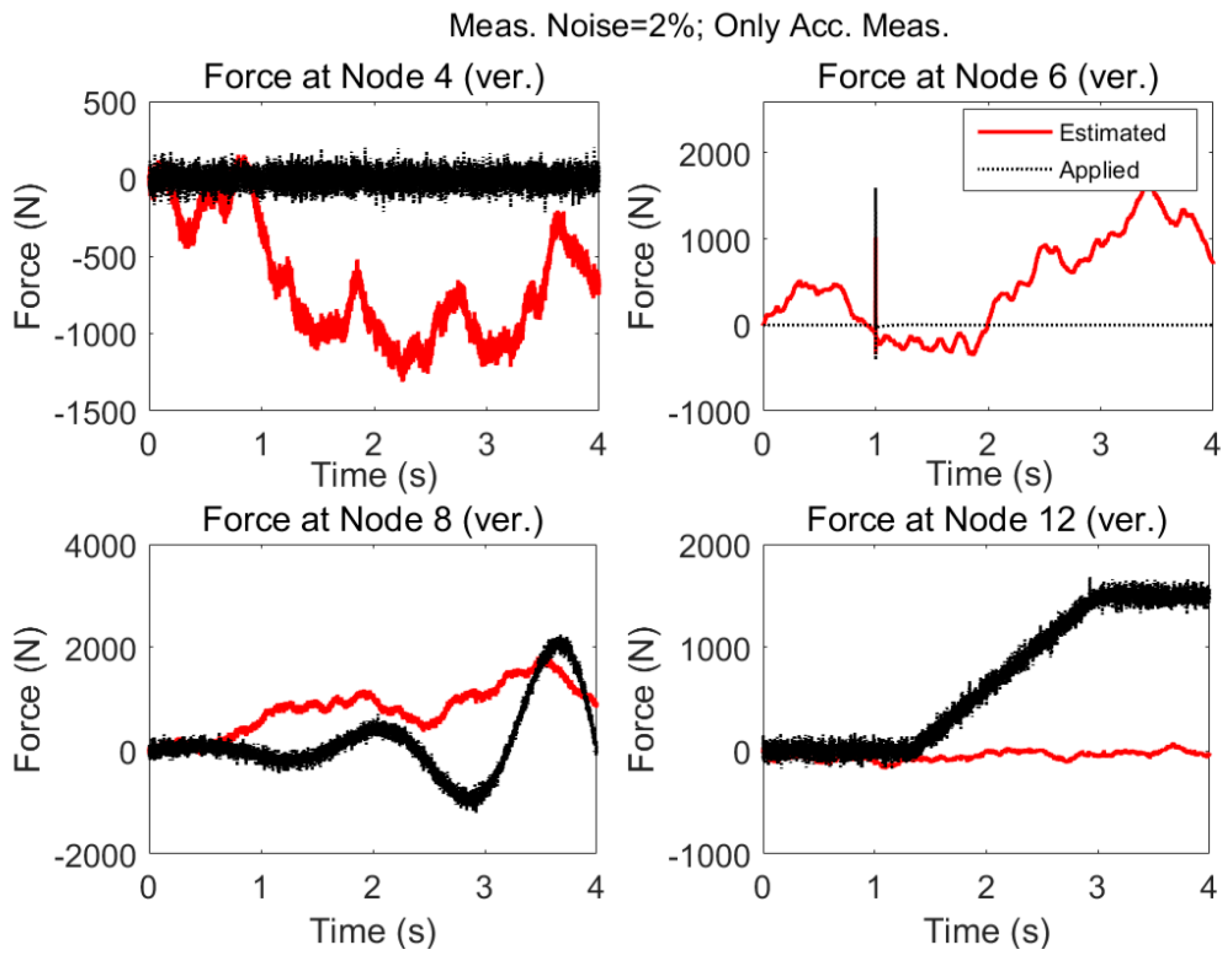
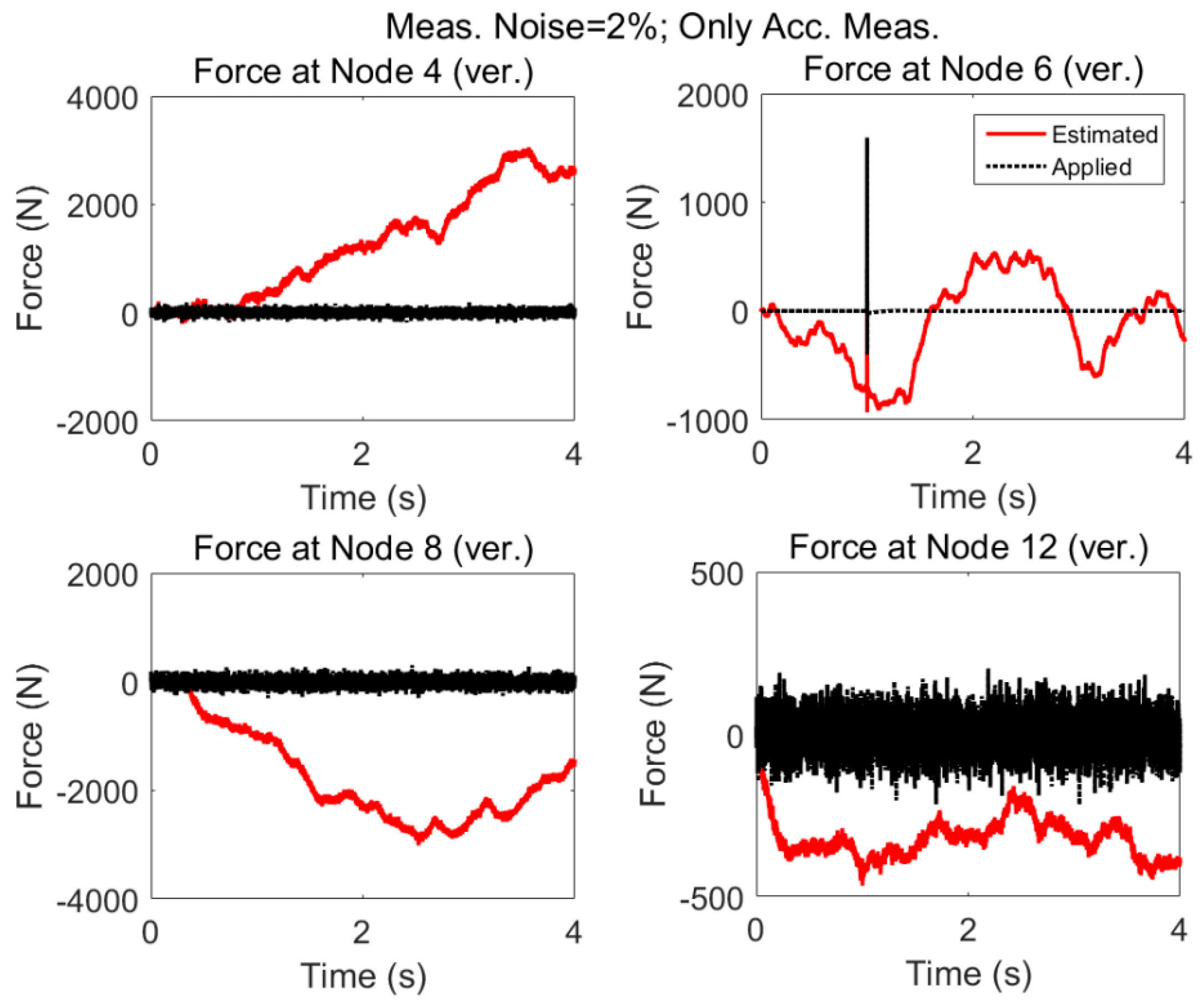
3.2. Case 2: Acceleration Measurements Only—Presence of Low Varying and Non-Zero Mean Excitations
3.2.1. No Modeling and Error, No Measurement Noise
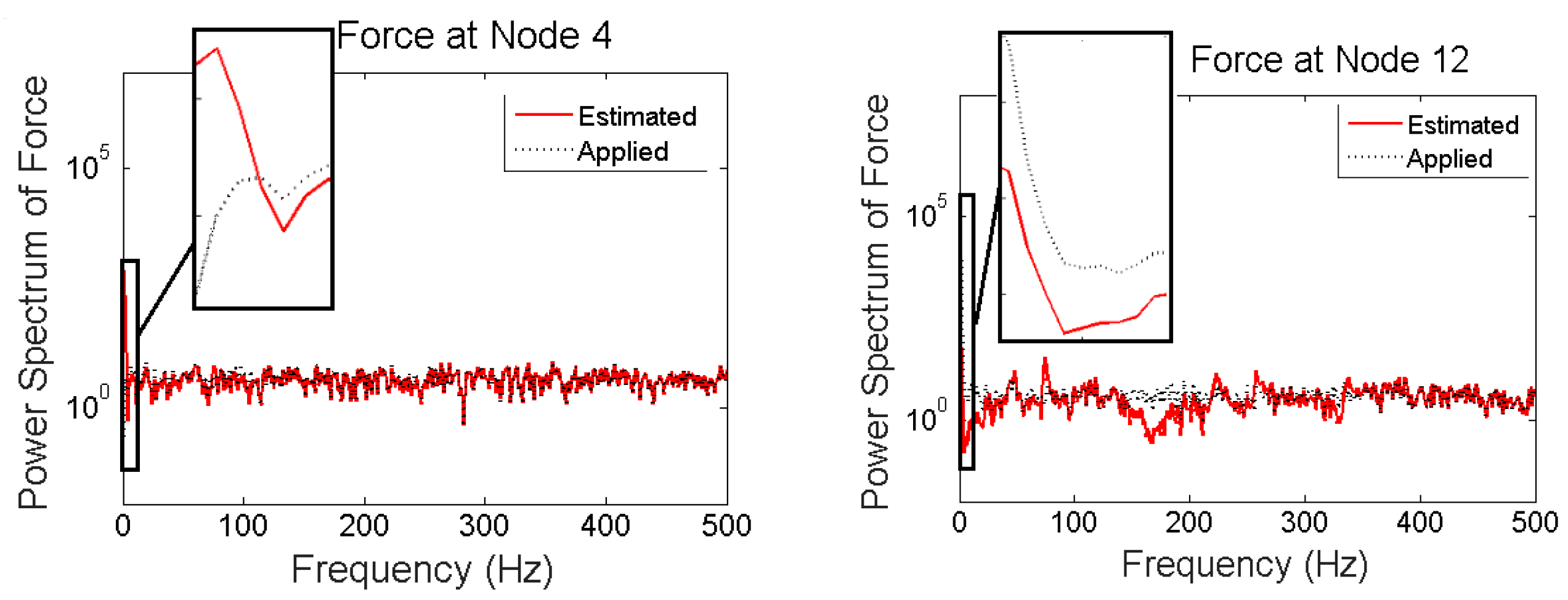
3.2.2. Modeling Error (5%) and Measurement Noise (2%)
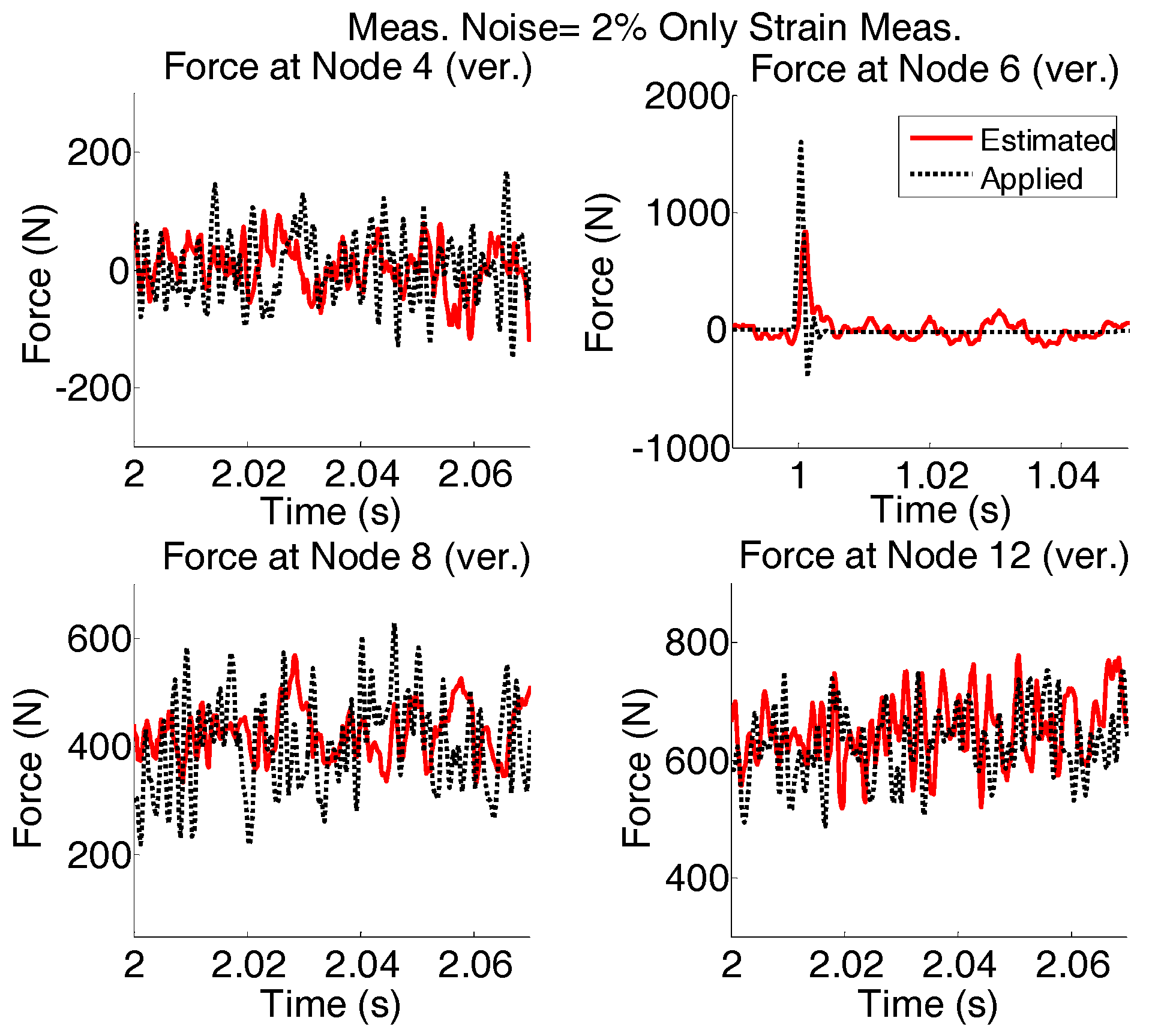
3.3. Case 3: Only Strains Are Measured—Modeling Error (5%) and Measurement Noise (2%)
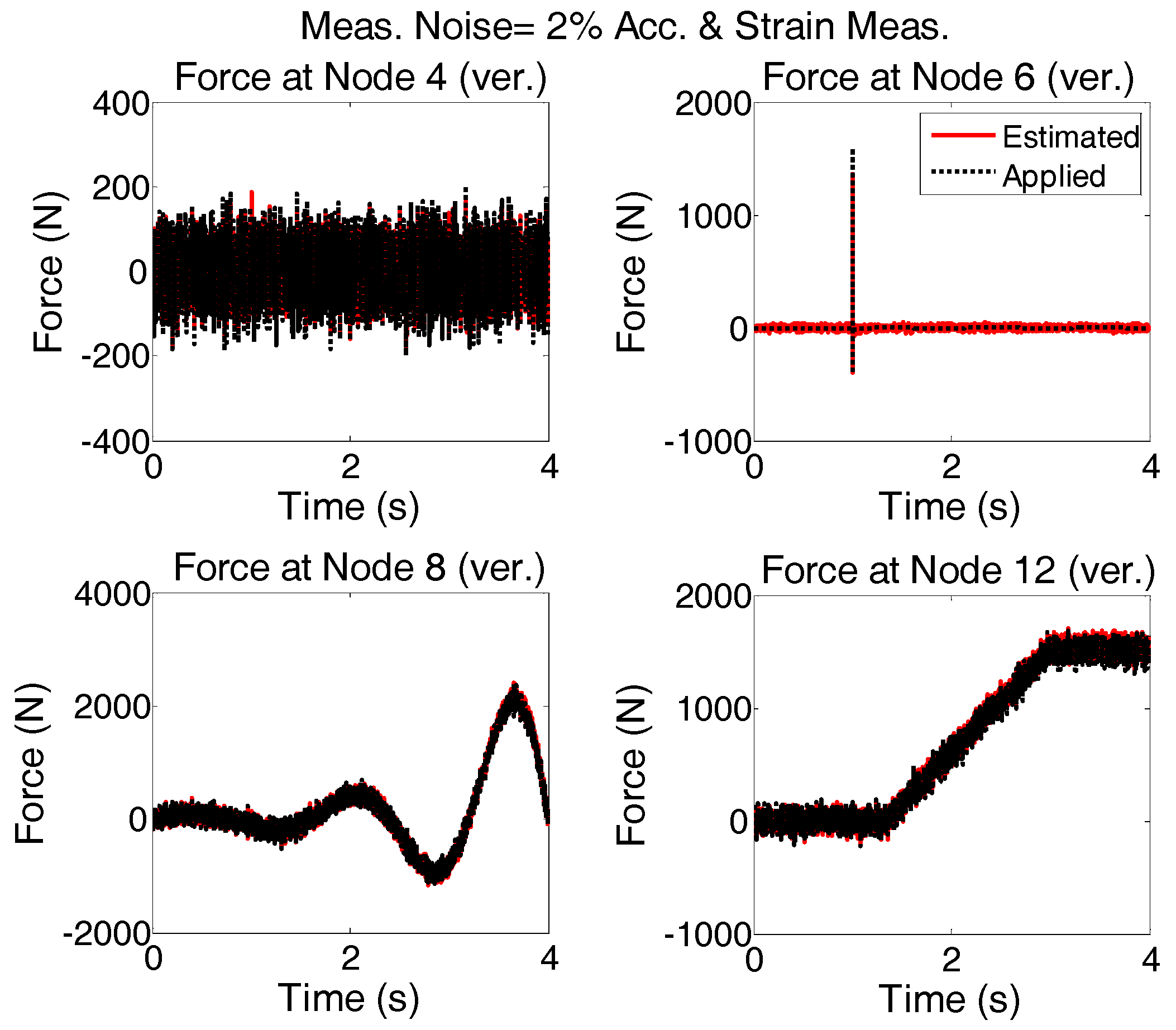
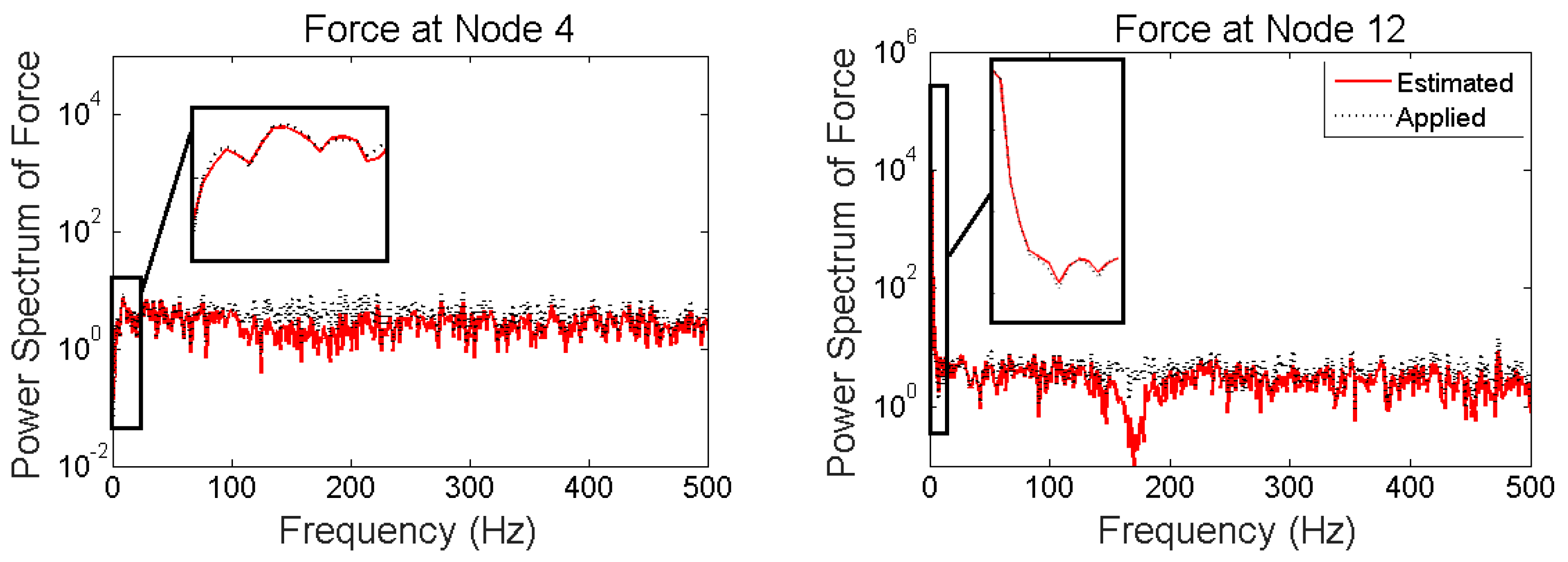
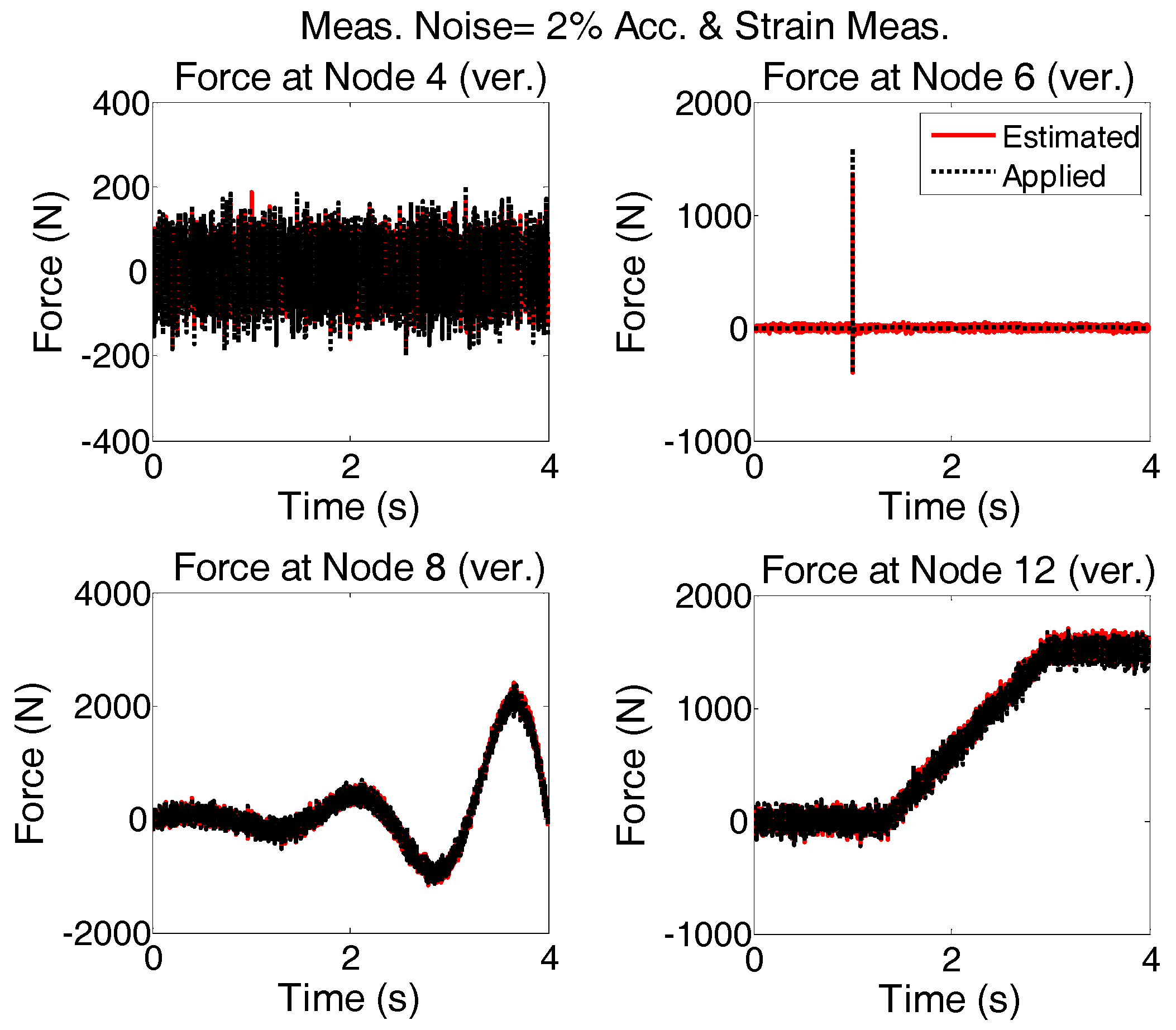
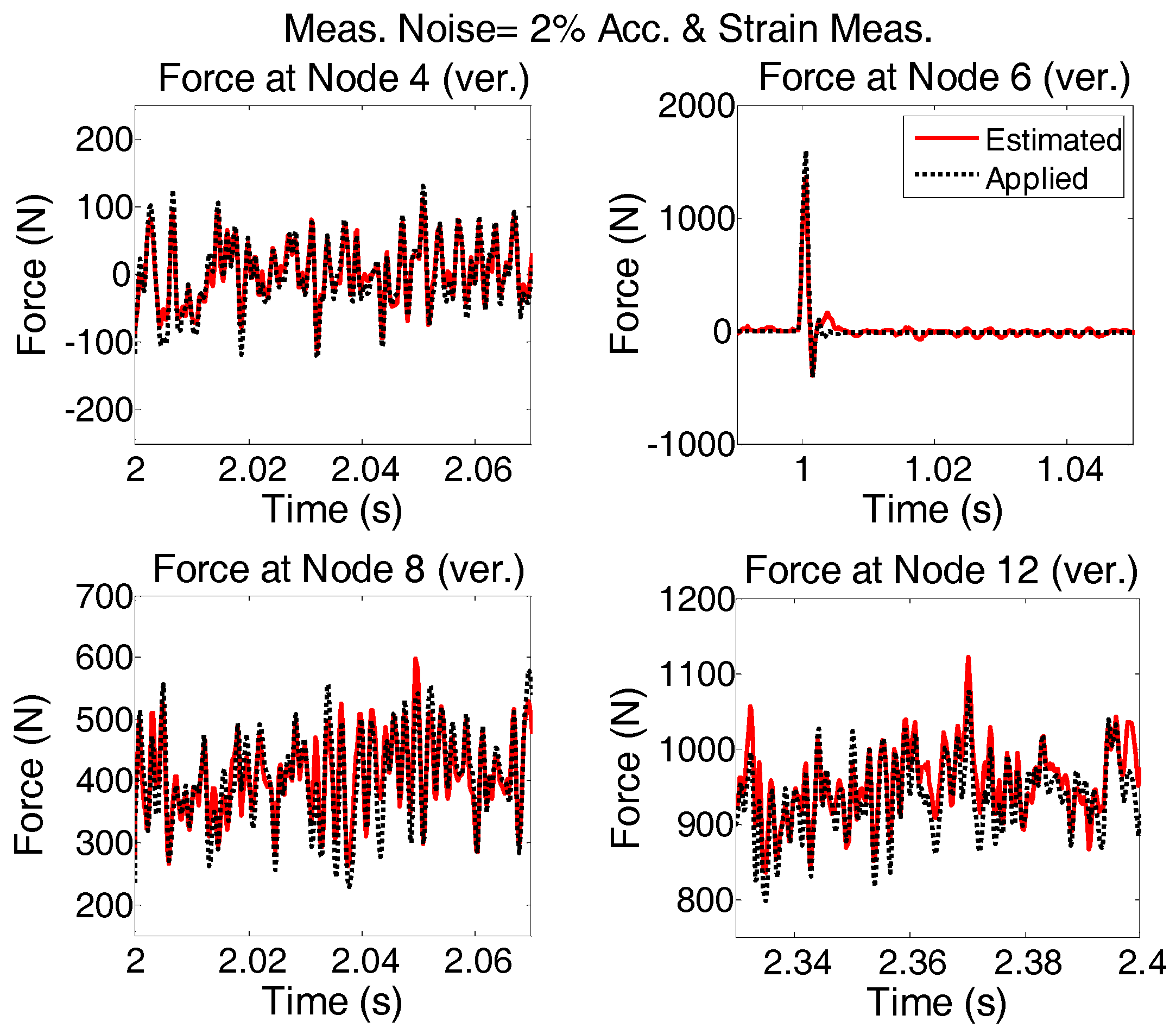
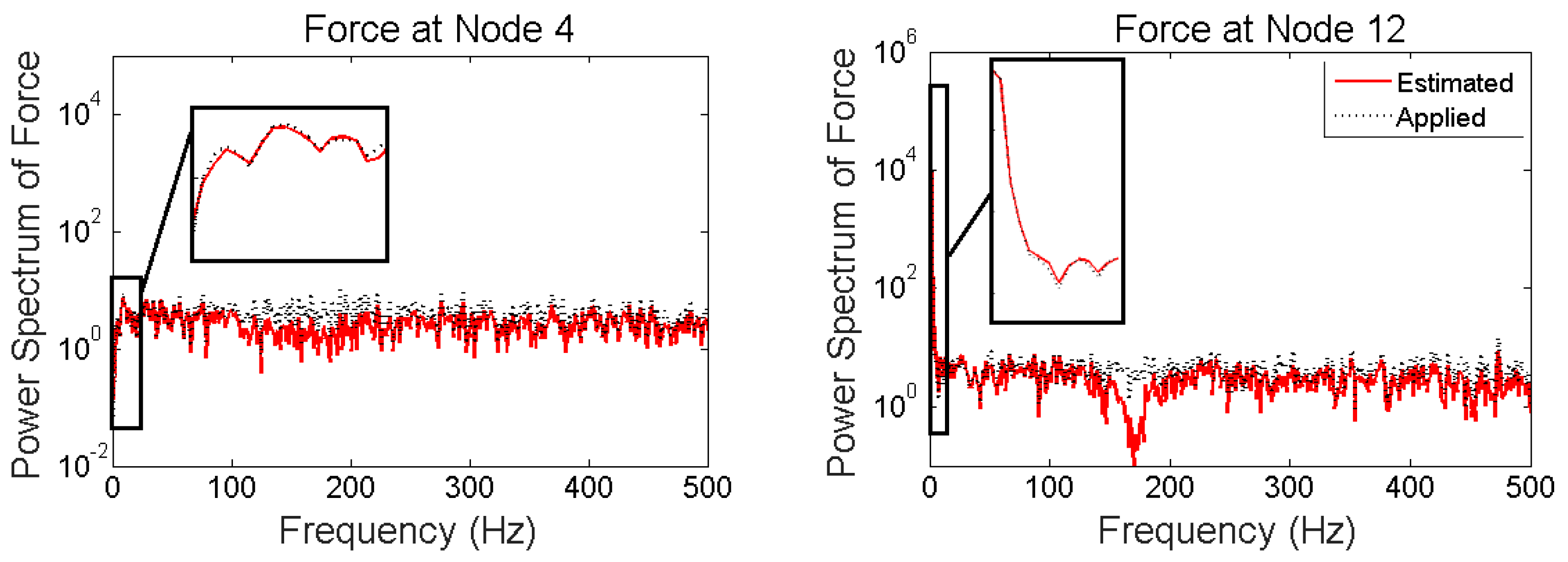
3.4. Case 4: Strain and Acceleration—Modeling Error (5%) and Measurement Noise (2%)
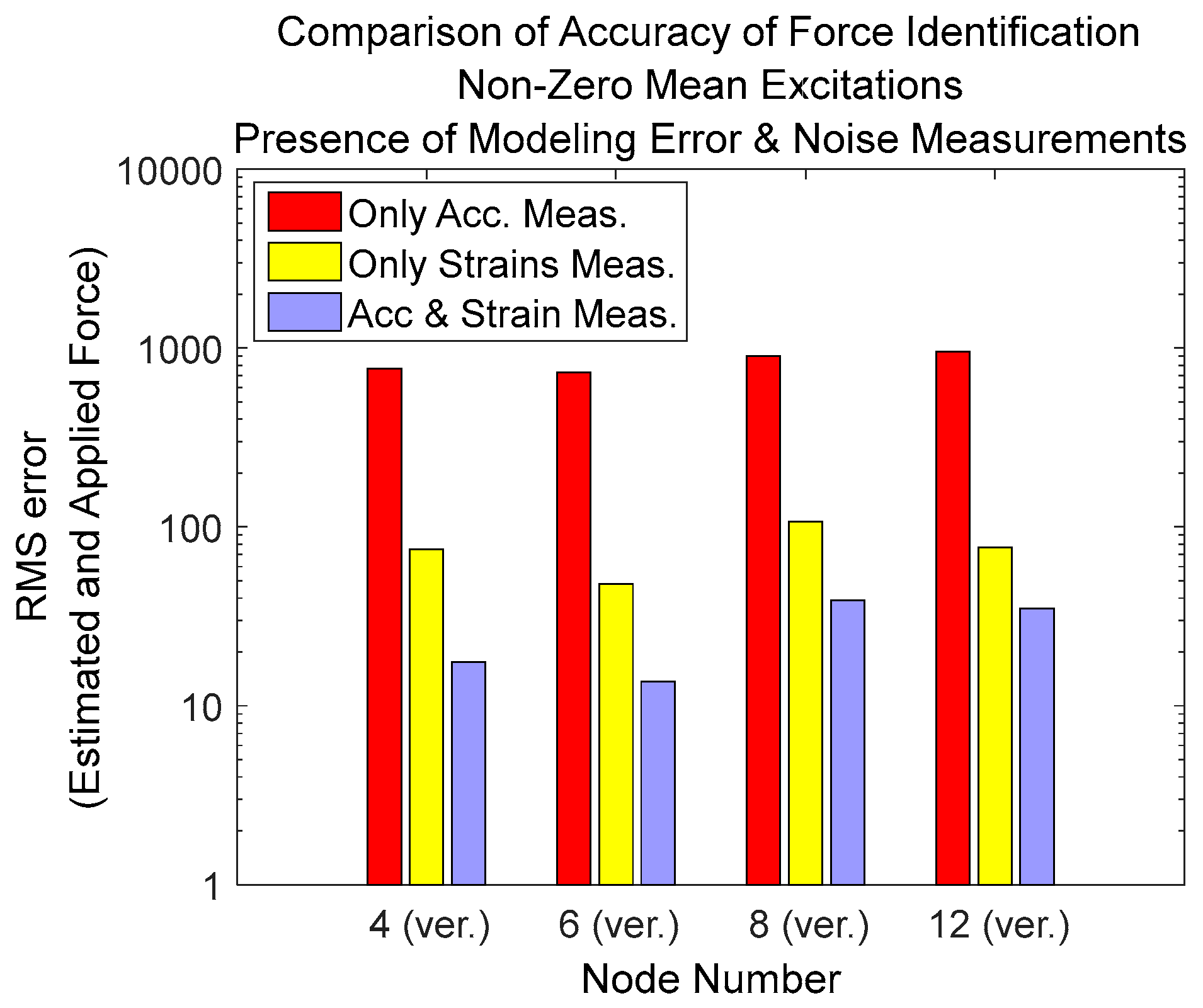
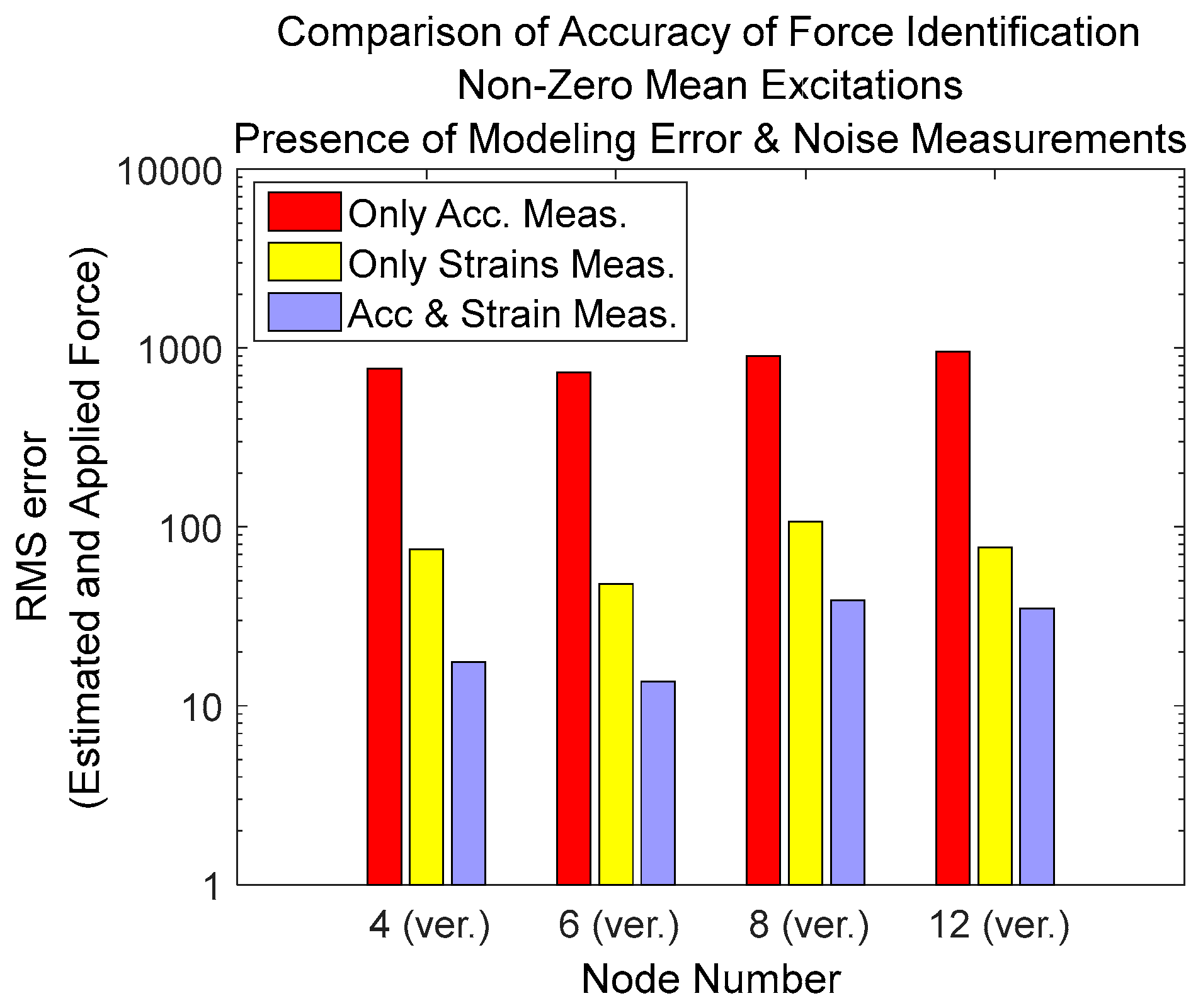
3.5. Comparison of Different Types of Measurements
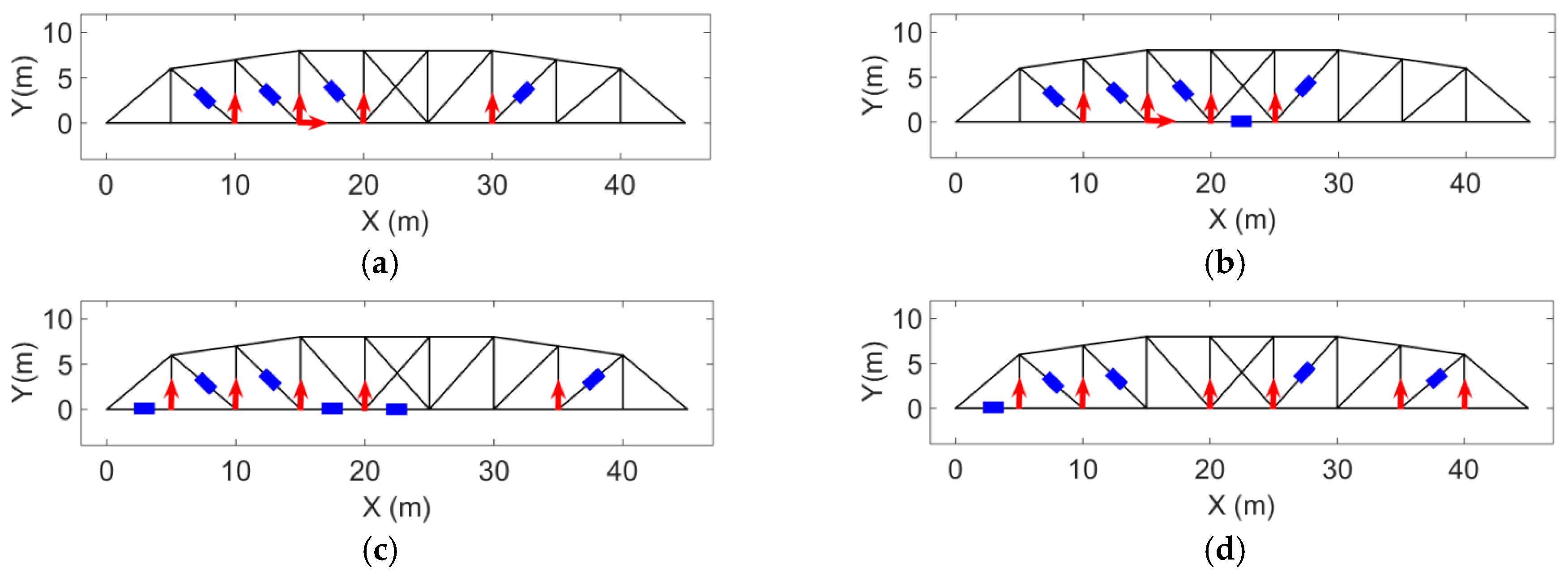
3.6. Effect of Different Configurations for Strain and Acceleration Measurements
4. Discussion and Conclusions
Author Contributions
Conflicts of Interest
References
- Liu, J.J.; Ma, C.K.; Kung, I.C.; Lin, D.C. Input force estimation of a cantilever plate by using a system identification technique. Comput. Methods Appl. Mech. Eng. 2000, 190, 1309–1322. [Google Scholar] [CrossRef]
- Ma, C.K.; Lin, D.C. Input forces estimation of a cantilever beam. Inverse Probl. Eng. 2000, 8, 511–528. [Google Scholar] [CrossRef]
- Harvey, D.; Cross, E.; Silva, R.A.; Farrar, C.; Bement, M. Input Estimation from Measured Structural Response. In Structural Dynamics; Springer: New York, NY, USA, 2011; Volume 3, pp. 689–708. [Google Scholar]
- Guillaume, P.; Parloo, E.; Verboven, P.; De Sitter, G. An Inverse Method for the Identification of Localized Excitation Sources. In Proceedings of the 20th International Modal Analysis Conference (IMAC XX), Los Angeles, CA, USA, 4–7 February 2002. [Google Scholar]
- Bateman, V.I.; Mayes, R.L.; Carne, T.G. Comparison of Force Reconstruction Methods for a Lumped Mass Beam. Shock Vib. 1997, 4, 231–239. [Google Scholar] [CrossRef]
- Ma, C.K.; Tuan, P.C.; Lin, D.C.; Liu, C.S. A study of an inverse method for the estimation of impulsive loads. Int. J. Syst. Sci. 1998, 29, 663–672. [Google Scholar] [CrossRef]
- Hollandsworth, P.E.; Busby, H.R. Impact force identification using the general inverse technique. Int. J. Impact Eng. 1989, 8, 315–322. [Google Scholar] [CrossRef]
- Nordström, L.J.; Nordberg, T.P. A time delay method to solve non-collocated input estimation problems. Mech. Syst. Signal Process. 2004, 18, 1469–1483. [Google Scholar] [CrossRef]
- Nordberg, T.P.; Gustafsson, I. Using QR factorization and SVD to solve input estimation problems in structural dynamics. Comput. Methods Appl. Mech. Eng. 2006, 195, 5891–5908. [Google Scholar] [CrossRef]
- Nordstrom, L.J.; Nordberg, T.P. A critical comparison of time domain load identification methods. In Proceedings of the 6th International Conference on Motion and Vibration Control, Saitama, Japan, 20–24 August 2002. [Google Scholar]
- Wang, B.T. Prediction of impact and harmonic forces acting on arbitrary structures: Theoretical formulation. Mech. Syst. Signal Process. 2002, 16, 935–953. [Google Scholar] [CrossRef]
- Muszynska, A. Vibrational diagnostics of rotating machinery malfunctions. Int. J. Rotat. Mach. 1995, 1, 237–266. [Google Scholar] [CrossRef]
- Olsson, M. On the fundamental moving load problem. J Sound. Vib. 1991, 145, 299–307. [Google Scholar] [CrossRef]
- Zhu, X.Q.; Law, S.S. Moving load identification on multi-span continuous bridges with elastic bearings. Mech. Syst. Signal Process. 2006, 20, 1759–1782. [Google Scholar] [CrossRef]
- Kreitinger, T.J. Force Identification from Structural Response (No. WL-TR-89-81); Weapons Lab (AFSC) Kirtland AFB NM: Albuquerque, NM, USA, 1990. [Google Scholar]
- Bateman, V.I.; Carne, T.G.; Mayes, R.L. Force reconstruction using a sum of weighted accelerations technique. In Proceedings of the 10th International Modal Analysis Conference, San Diego, CA, USA, 3–7 February 1992. [Google Scholar]
- Sharif-Khodaei, Z.; Ghajari, M.; Aliabadi, M.H. Determination of impact location on composite stiffened panels. Smart Mater. Struct. 2012, 21. [Google Scholar] [CrossRef]
- Ghajari, M.; Sharif-Khodaei, Z.; Aliabadi, M.H.; Apicella, A. Identification of impact force for smart composite stiffened panels. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]
- Sun, H.; Büyüköztürk, O. Identification of traffic-induced nodal excitations of truss bridges through heterogeneous data fusion. Smart Mater. Struct. 2015, 22. [Google Scholar] [CrossRef]
- Mao, Y.M.; Guo, X.L.; Zhao, Y. A state space force identification method based on Markov parameters precise computation and regularization technique. J. Sound Vib. 2010, 329, 3008–3019. [Google Scholar] [CrossRef]
- Li, Z.; Feng, Z.P.; Chu, F.L. A load identification method based on wavelet multi-resolution analysis. J. Sound Vib. 2014, 333, 381–391. [Google Scholar] [CrossRef]
- Ding, Y.; Law, S.S.; Wu, B.; Xu, G.S.; Lin, Q.; Jiang, H.B.; Miao, Q.S. Average acceleration discrete algorithm for force identification in state space. Eng. Struct. 2013, 56, 1880–1892. [Google Scholar] [CrossRef]
- Bernal, D.; Ussia, A. Sequential deconvolution input reconstruction. Mech. Syst. Signal Process. 2015, 50–51, 41–55. [Google Scholar] [CrossRef]
- Lai, T.; Yi, T.-H.; Li, H.-N. Parametric study on sequential deconvolution for force identification. J. Sound Vib. 2016, 377, 76–89. [Google Scholar] [CrossRef]
- Ma, C.K.; Chang, J.M.; Lin, D.C. Input forces estimation of beam structures by an inverse method. J. Sound Vib. 2003, 259, 387–407. [Google Scholar] [CrossRef]
- Tuan, P.C.; Ji, C.C.; Fong, L.W.; Huang, W.T. An input estimation approach to on-line two-dimensional inverse heat conduction problems. Numer. Heat Transf. Fundam. 1996, 29, 345–363. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; Department of Computer Science University: Chapel Hill, NC, USA, 2000. [Google Scholar]
- Hoshiya, M.; Saito, E. Structural identification by extended Kalman filter. J. Eng. Mech. ASCE 1984, 110, 1757–1770. [Google Scholar] [CrossRef]
- Yang, J.N.; Lin, S.; Huang, H.; Zhou, L. An adaptive extended Kalman filter for structural damage identification. Struct. Control Health Monit. 2006, 13, 849–867. [Google Scholar] [CrossRef]
- Ghanem, R.; Ferro, G. Health monitoring for strongly non-linear systems using the Ensemble Kalman filter. Struct. Control Health Monit. 2006, 13, 245–259. [Google Scholar] [CrossRef]
- Kivman, G.A. Sequential parameter estimation for stochastic systems. Nonlinear Process. Geophys. 2003, 10, 253–259. [Google Scholar] [CrossRef]
- Miller, R.N.; Carter, E.F.; Blue, S.T. Data assimilation into nonlinear stochastic models. Tellus Ser. A Dyn. Meteorol. Oceanogr. 1999, 51, 167–194. [Google Scholar] [CrossRef]
- Khalil, M.; Sarkar, A.; Adhikari, S. Nonlinear filters for chaotic oscillatory systems. Nonlinear Dyn. 2009, 55, 113–137. [Google Scholar] [CrossRef]
- He, J.; Huang, Q.; Xu, Y.L. Synthesis of vibration control and health monitoring of building structures under unknown excitation. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Palanisamy, R.; Cho, S.; Kim, H.; Sim, S.H. Experimental validation of Kalman filter-based strain estimation in structures subjected to non-zero mean input. Smart Mater. Struct. 2015, 15, 489–503. [Google Scholar] [CrossRef]
- Jo, H.; Spencer, B.F., Jr. Multi-scale Model-based Structural Health Monitoring. In Proceedings of the SPIE, San Diego, CA, USA, 9–13 March 2014; Volume 9061. [Google Scholar]
- Vester, R.; Percin, M.; van Oudheusden, B. Deconvolution Kalman filtering for force measurements of revolving wings. Meas. Sci. Technol. 2016, 27. [Google Scholar] [CrossRef]
- Wahrburg, A.; Bos, J.; Listmann, K.D.; Dai, F.; Matthias, B.; Ding, H. Motor-Current-Based estimation of cartesian contact forces and torques for robotic manipulators and its application to force control. IEEE Trans. Autom. Sci. Eng. 2017, 1–8. [Google Scholar] [CrossRef]
- Capurso, M.; Ardakani, M.M.G.; Johansson, R.; Robertsson, A.; Rocco, P. Sensorless kinesthetic teaching of robotic manipulators assisted by observer-based force control. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 945–950. [Google Scholar]
- Lourens, E.; Reynders, E.; De Roeck, G.; Degrande, G.; Lombaert, G. An augmented Kalman filter for force identification in structural dynamics. Mech. Syst. Signal Process. 2012, 27, 446–460. [Google Scholar] [CrossRef]
- Naets, F.; Cuadrado, J.; Desmet, W. Stable force identification in structural dynamics using Kalman filtering and dummy-measurements. Mech. Syst. Signal Process. 2015, 50, 235–248. [Google Scholar] [CrossRef]
- Lourens, E.; Papadimitriou, C.; Gillijns, S.; Reynders, E.; De Roeck, G.; Lombaert, G. Joint input-response estimation for structural systems based on reduced-order models and vibration data from a limited number of sensors. Mech. Syst. Signal Process. 2012, 29, 310–327. [Google Scholar] [CrossRef]
- Maes, K.; Smyth, A.W.; De Roeck, G.; Lombaert, G. Joint input-state estimation in structural dynamics. Mech. Syst. Signal Process. 2016, 70, 445–466. [Google Scholar] [CrossRef]
- Azam, S.E.; Chatzi, E.; Papadimitriou, C. A dual Kalman filter approach for state estimation via output-only acceleration measurements. Mech. Syst. Signal Process. 2015, 60, 866–886. [Google Scholar] [CrossRef]
- Azam, S.E.; Chatzi, E.; Papadimitriou, C.; Smyth, A. Experimental validation of the Kalman-type filters for online and real-time state and input estimation. J. Vib. Control 2017, 23, 2494–2519. [Google Scholar] [CrossRef]
- Pisoni, A.C.; Santolini, C.; Hauf, D.E.; Dubowsky, S. Displacements in a vibrating body by strain gage measurements. In Proceedings of the International Society for Optical Engineering, Trest Castle, Czech Republic, 18–22 September 1995. [Google Scholar]
- Santos, F.; Peeters, B.; Menchicchi, M.; Lau, J.; Gielen, L.; Desmet, W.; Goes, L. Strain-based dynamic measurements and modal testing. In Proceedings of the 32nd International Modal Analysis Conference, Orlando, FL, USA, 3–6 February 2014. [Google Scholar]
- Juang, J.N.; Phan, M.Q. Identification and Control of Mechanical Systems; Cambridge University Press: Cambridge, UK, 2001; Chapter 7. [Google Scholar]
- Sim, S.H.; Spencer, B.F., Jr.; Nagayama, T. Multi-metric sensing for structural damage detection. J. Eng. Mech. 2010, 137, 22–30. [Google Scholar] [CrossRef]
- Park, J.W.; Sim, S.H.; Jung, H.J. Displacement estimation using Multi-metric data fusion. IEEE/ASME Trans. Mechatron. 2013, 18, 1675–1682. [Google Scholar] [CrossRef]
- Brandt, A. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Liu, G.R.; Quek, S.S. The Finite Element Method: A Practical Course; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Thorby, D. The Linear Single Degree of Freedom System: Response in the Time Domain. In Structural Dynamics and Vibration in Practice: An Engineering Handbook; Butterworth-Heinemann: Oxford, UK, 2008; Chapter 3. [Google Scholar]
- Josefsson, A.; Magnevall, M.; Ahlin, K.; Broman, G. Spatial location identification of structural nonlinearities from random data. Mech. Syst. Signal Process. 2012, 27, 410–418. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elements | Young Modulus (Pa) | Cross Section Area (cm2) | Density Kg/m3 |
|---|---|---|---|
| 1, 6, 10, 14, 18, 23, 27, 31, 34 | 200 × 109 | 15 | 7800 |
| 2, 3, 4, 7, 8, 11, 12, 15, 16, 20, 21, 24, 25, 28, 29, 32, 33 | 200 × 109 | 9.75 | 7800 |
| 5, 9, 13, 17, 19, 22, 26, 30 | 200 × 109 | 4.75 | 7800 |
| Configurations and Frequency Ranges | Random and Impulsive Excitation | Random and Impulsive Excitations + Low Varying and Non-Zero Mean Excitations | |||
|---|---|---|---|---|---|
| No Measurement Noise & No Modelling Error | 2% Measurement Noise & 5% Modelling Error | No Measurement Noise & No Modelling Error | 2% Measurement Noise & 5% Modelling Error | ||
| Acc. | Low Frequency | - | - | ✕ | ✕ |
| High Frequency | √ | ✕ | ✕ | ✕ | |
| strain | Low Frequency | - | - | √ | √ |
| High Frequency | ✕ | ✕ | ✕ | ✕ | |
| Acc. + strain | Low Frequency | - | - | √ | √ |
| High Frequency | √ | √ | √ | √ | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khodabandeloo, B.; Melvin, D.; Jo, H. Model-Based Heterogeneous Data Fusion for Reliable Force Estimation in Dynamic Structures under Uncertainties. Sensors 2017, 17, 2656. https://doi.org/10.3390/s17112656
Khodabandeloo B, Melvin D, Jo H. Model-Based Heterogeneous Data Fusion for Reliable Force Estimation in Dynamic Structures under Uncertainties. Sensors. 2017; 17(11):2656. https://doi.org/10.3390/s17112656
Chicago/Turabian StyleKhodabandeloo, Babak, Dyan Melvin, and Hongki Jo. 2017. "Model-Based Heterogeneous Data Fusion for Reliable Force Estimation in Dynamic Structures under Uncertainties" Sensors 17, no. 11: 2656. https://doi.org/10.3390/s17112656
APA StyleKhodabandeloo, B., Melvin, D., & Jo, H. (2017). Model-Based Heterogeneous Data Fusion for Reliable Force Estimation in Dynamic Structures under Uncertainties. Sensors, 17(11), 2656. https://doi.org/10.3390/s17112656