Visual Localization across Seasons Using Sequence Matching Based on Multi-Feature Combination †


Abstract
1. Introduction
2. Background and Related Works
3. Proposed Visual Localization Approach
3.1. Sequence Feature Extraction
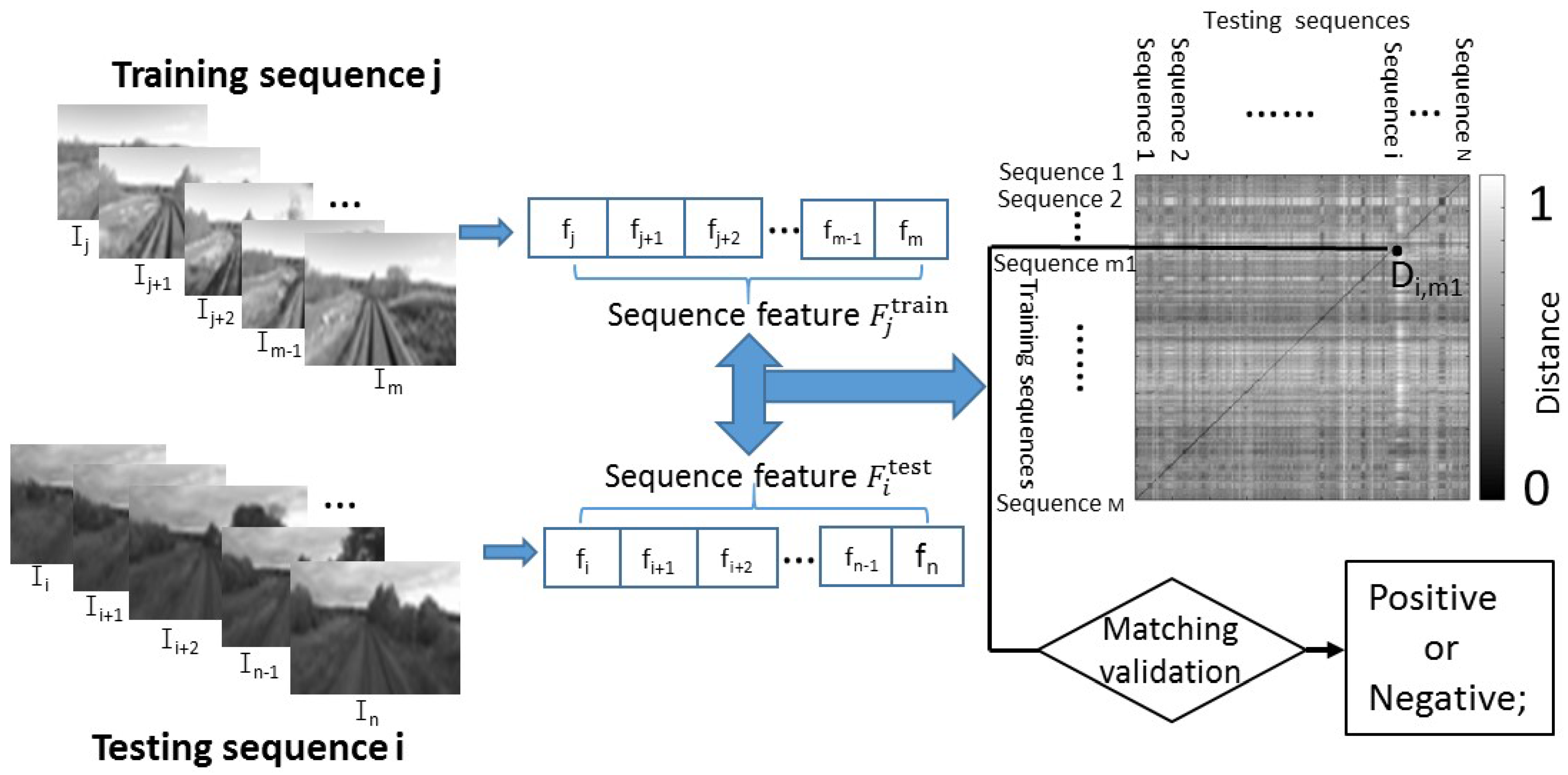
3.2. Image Sequence Matching
3.3. Matching Validation
3.4. Visual Localization
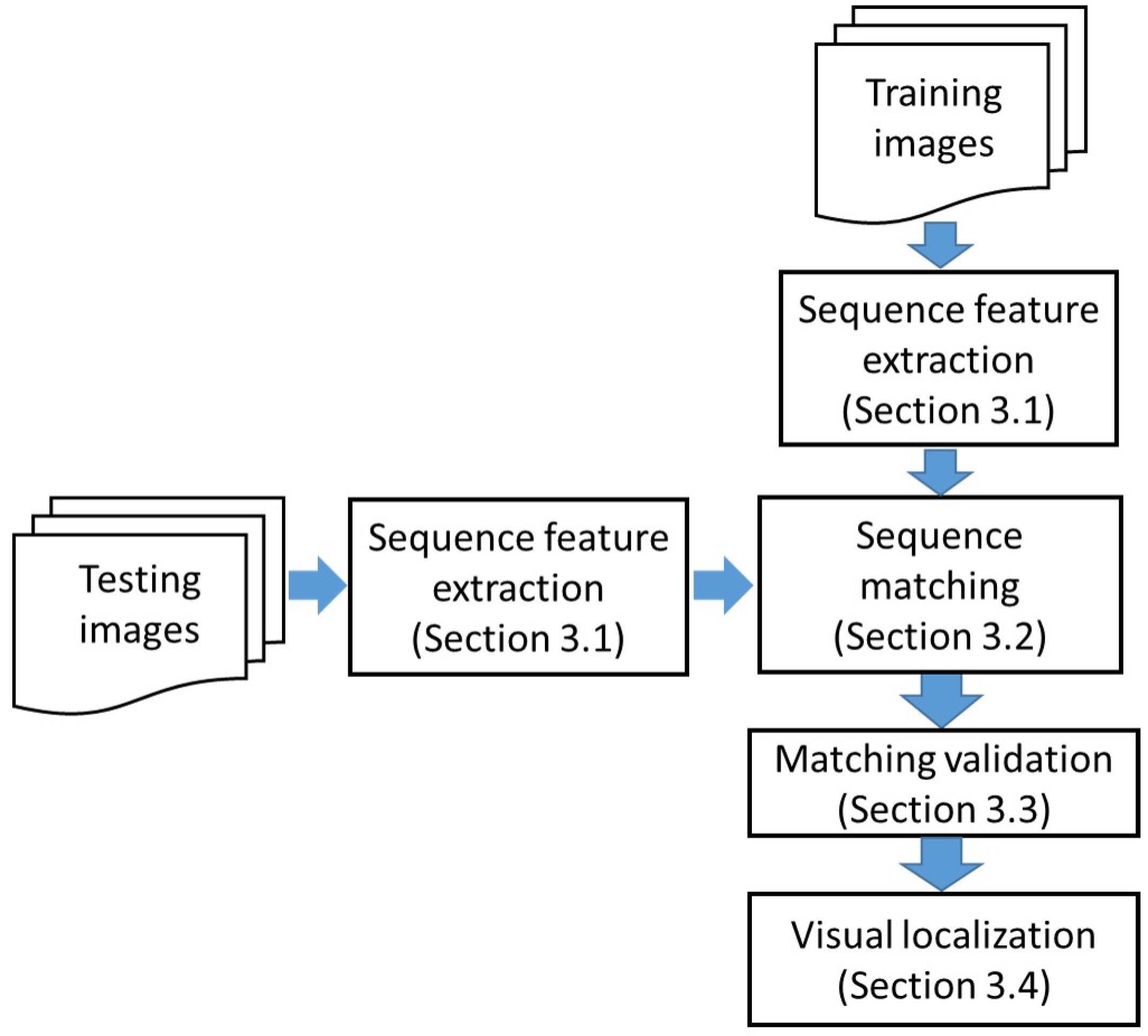
3.5. Algorithm of Proposed Visual Localization
| Algorithm 1 Sequence matching using feature CSLBP++GIST. |
| Inputs: |
| {training images}; {testing images }; |
| {training and testing images numbers}; {Sequence length}; |
| Outputs: |
| D{distance matrix}; |
| Algorithm: |
| TRAINING PHASE |
| for j← 1 to / do |
| ←Feature of training sequence. |
| end for |
| TESTING PHASE |
| /∗ Sequence matching based on feature sequences; Section 3.2 ∗/ |
| for i← 1 to do |
| ←Feature of testing sequence. |
| for j← 1 to do |
| ; k is the index of the components of feature vector (See Equation (7)). |
| end for |
| end for |
| Algorithm 2 Sequence matching validation and visual localization. |
| Inputs: |
| i { Index of testing sequences}; j {Index of training sequences }; |
| {Distance matrix between the testing sequences and training sequences}; |
| Outputs: |
| SS{distance ratio}; Vehicle position |
| Algorithm: |
| for Each testing sequence i ← 1 to do |
| ; is the index of the first minimum distance. |
| if |
| Matching validation is positive; |
| Vehicle position ← the matched training image position |
| if |
| Matching validation is negative; |
| Vehicle position ← NaN (no position result) |
| end for |
4. Experimental Setup
4.1. Dataset and Ground-Truth
4.2. Evaluation Method
5. Experiments and Results
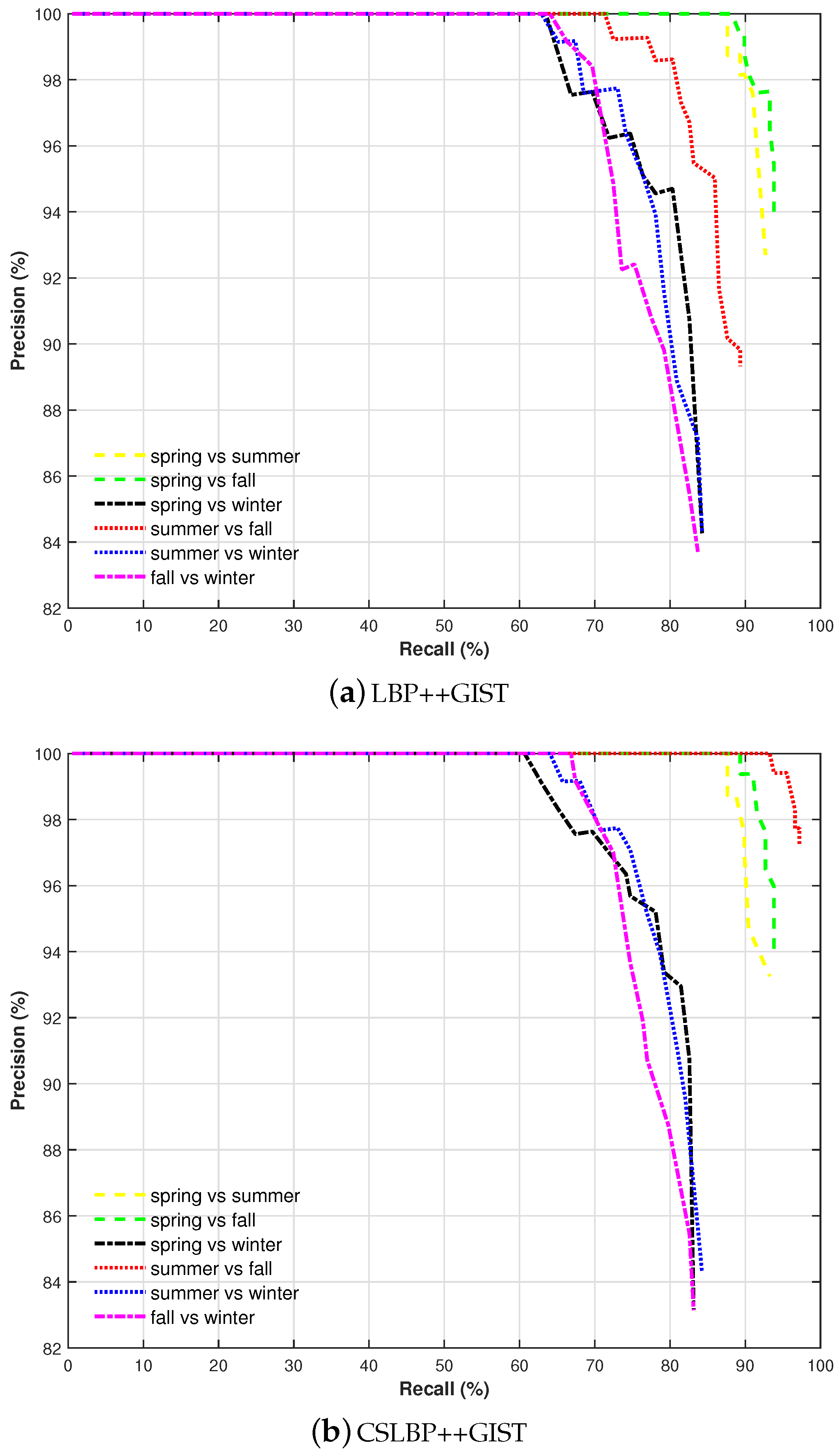
5.1. Feature Combination Analysis
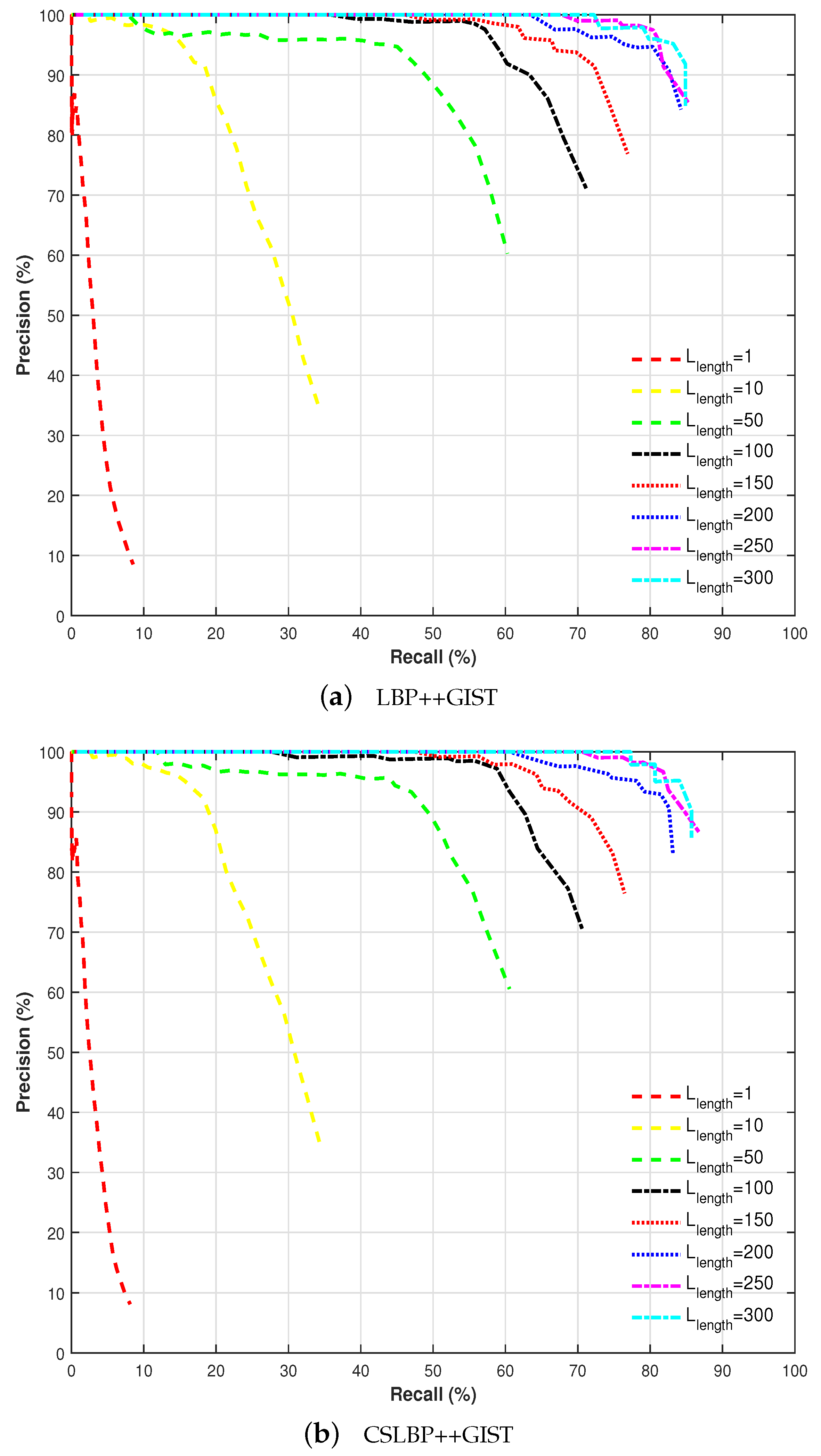
5.2. Sequence Length Selection
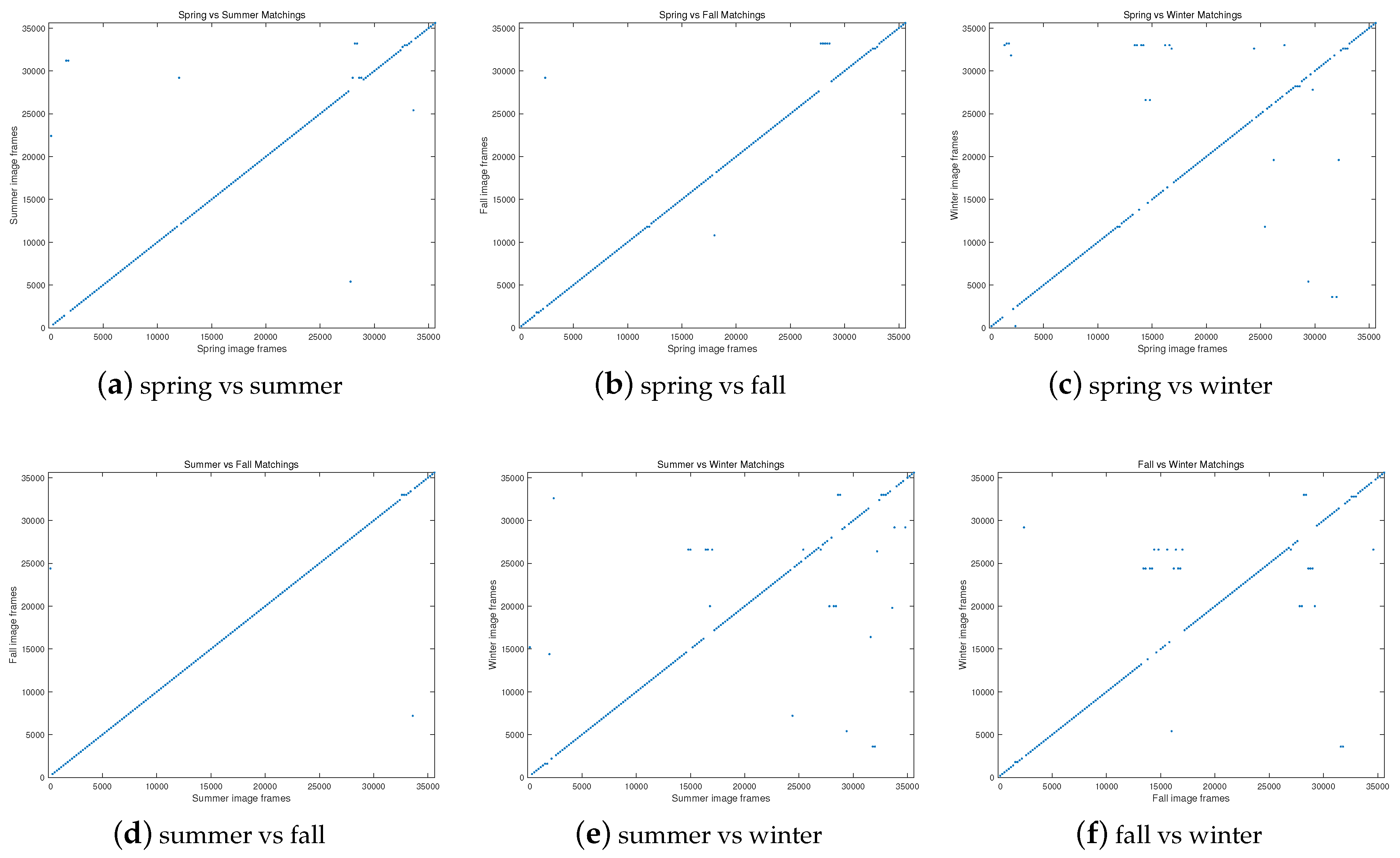
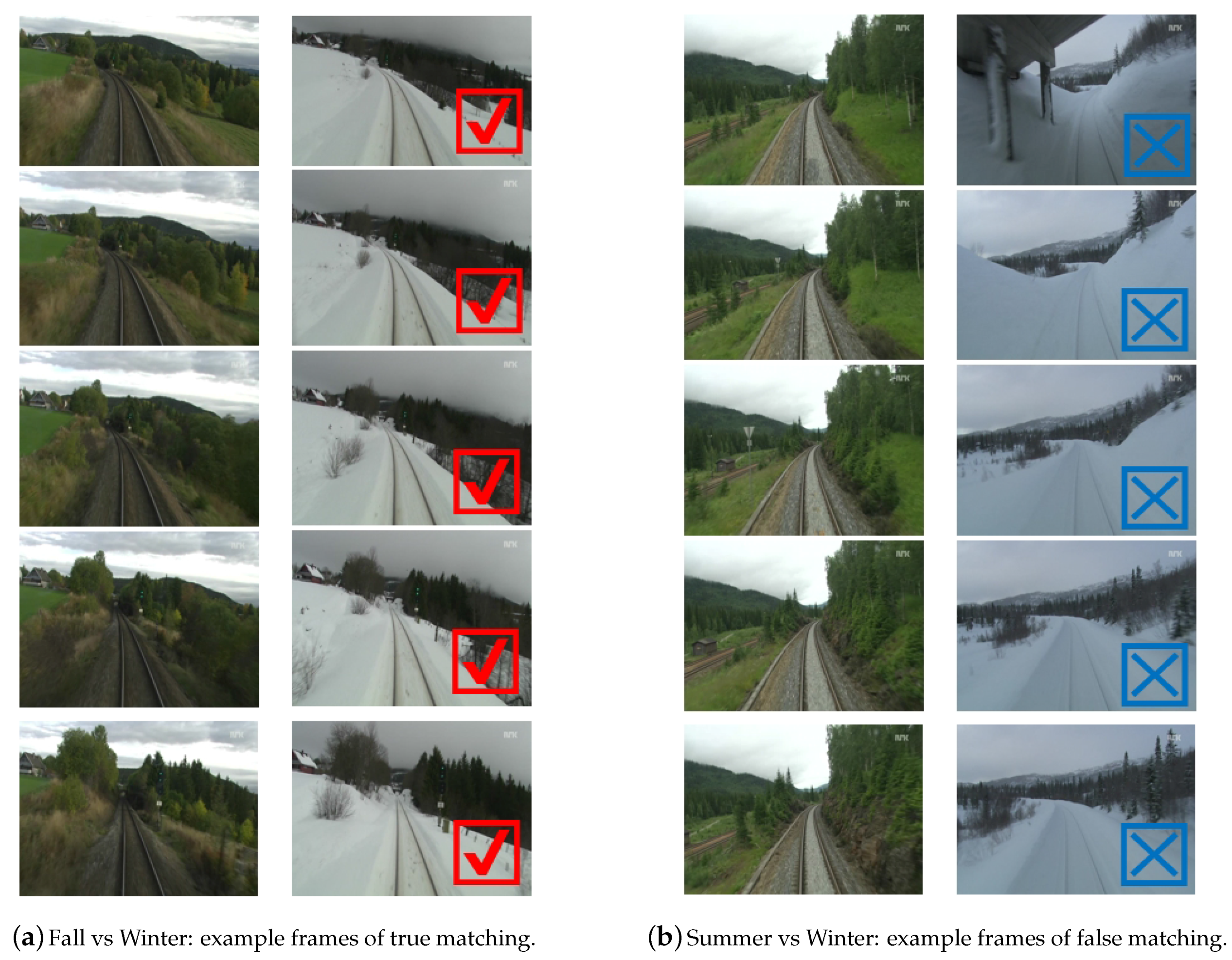
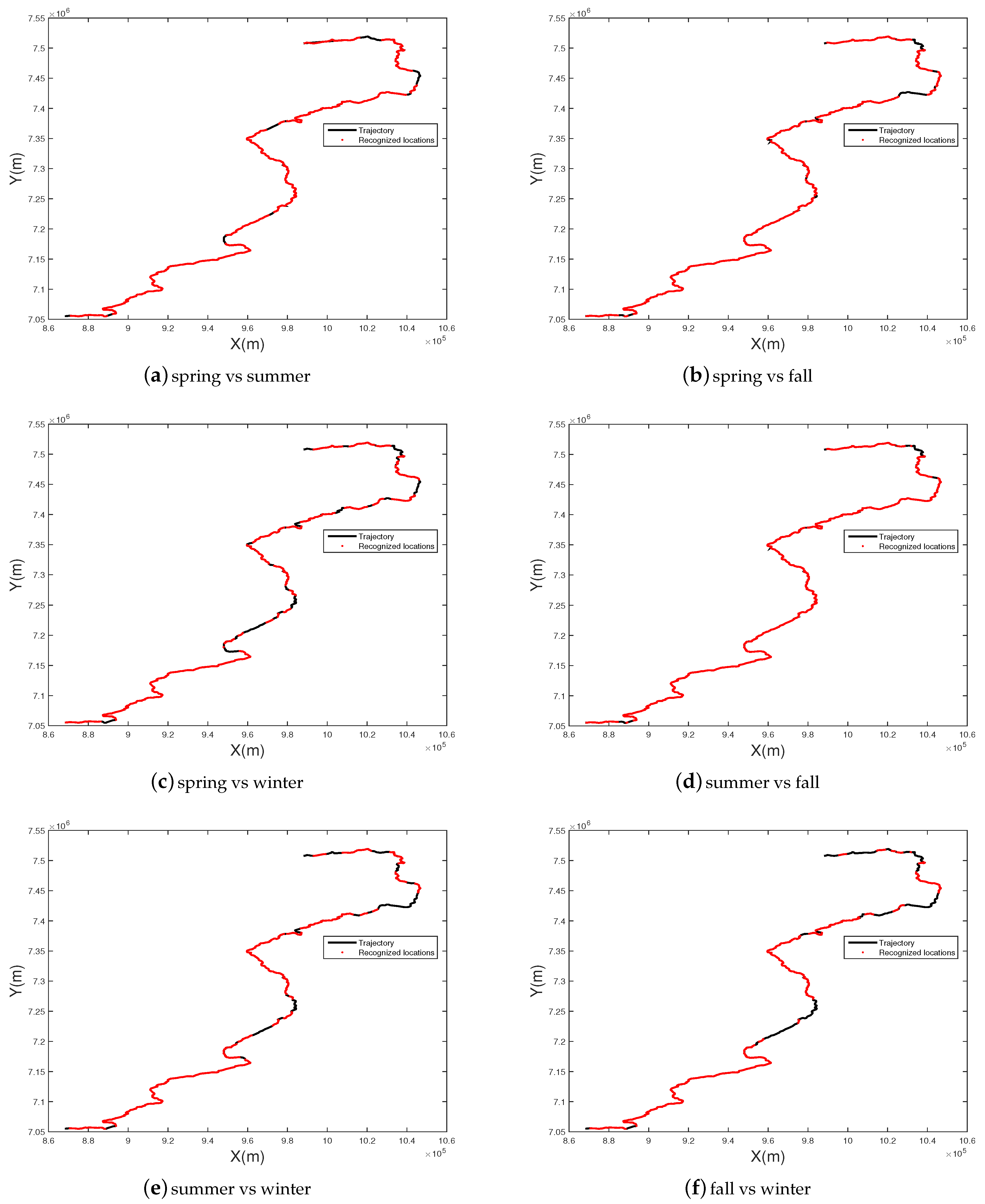
5.3. Visual Localization under Different Season Couples
6. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| FAB-MAP | Fast Appearance Based Mapping |
| SeqSLAM | Sequence Simultaneous Localisation and Mapping |
| GIST | The “GIST” is an abstract representation of the scene |
| CSLBP | Center-Symmetric Local Binary Patterns |
| SIFT | Scale-Invariant Feature Transform |
| SURF | Speeded Up Robust Features |
References
- Garcia-Fidalgo, E.; Ortiz, A. Vision-based topological mapping and localization methods: A survey. Robot. Auton. Syst. 2015, 64, 1–20. [Google Scholar] [CrossRef]
- Lowry, S.; Snderhauf, N.; Newman, P.; Leonard, J.J.; Cox, D.; Corke, P.; Milford, M.J. Visual Place Recognition: A Survey. IEEE Trans. Robot. 2016, 32, 1–19. [Google Scholar] [CrossRef]
- Valgren, C.; Lilienthal, A. Incremental Spectral Clustering and Seasons: Appearance-Based Localization in Outdoor Environments. In Proceedings of the ICRA IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1856–1861. [Google Scholar]
- Qiao, Y.; Cappelle, C.; Ruichek, Y. Visual Localization Using Sequence Matching Based on Multi-Feature Combination. In Proceedings of the International Conference on Advanced Concepts for Intelligent Vision Systems (ACIVS 2016), Lecce, Italy, 24–27 October 2016. [Google Scholar]
- Cummins, M.; Newman, P. FAB-MAP: Probabilistic localization and mapping in the space of appearance. Int. J. Robot. Res. 2008, 27, 647–665. [Google Scholar] [CrossRef]
- Cummins, M.; Newman, P. Appearance-only SLAM at large scale with FAB-MAP 2.0. Int. J. Robot. Res. 2011, 30, 1100–1123. [Google Scholar] [CrossRef]
- Milford, M.; Wyeth, G. SeqSLAM: Visual Route-Based Navigation for Sunny Summer Days and Stormy Winter Nights. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 1643–1649. [Google Scholar]
- Sünderhauf, N.; Neubert, P.; Protzel, P. Are We There Yet? Challenging SeqSLAM on a 3000 km Journey Across All Four Seasons. In Proceedings of the Workshop on Long-Term Autonomy, IEEE International Conference on Robotics and Automation (ICRA), Chemnitz, Germany, 15 January 2013. [Google Scholar]
- Sun, Z.; Wang, X.; Liu, J. Application of Image Retrieval Based on the Improved Local Binary Pattern. In Proceedings of the 4th International Conference on Computer Engineering and Networks, Shanghai, China, 19–20 July 2015; pp. 531–538. [Google Scholar]
- Cai, Z.; Gu, Z.; Yu, Z.L.; Liu, H.; Zhang, K. A real-time visual object tracking system based on Kalman filter and MB-LBP feature matching. Multimed. Tools Appl. 2016, 75, 2393–2409. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikäinen, M.; Harwood, D. A comparative study of texture measures with classification based on featured distributions. Pattern Recog. 1996, 29, 51–59. [Google Scholar] [CrossRef]
- Heikkilä, M.; Pietikäinen, M.; Schmid, C. Description of interest regions with center-symmetric local binary patterns. In Proceedings of the 5th Indian conference on Computer Vision, Graphics and Image Processing, Madurai, India, 13–16 December 2006; pp. 58–69. [Google Scholar]
- Kylberg, G.; Sintorn, I.M. Evaluation of noise robustness for local binary pattern descriptors in texture classification. EURASIP J. Image Video Proc. 2013, 2013, 1–20. [Google Scholar] [CrossRef]
- Song, D.; Tao, D. Biologically inspired feature manifold for scene classification. IEEE Trans. Image Proc. 2010, 19, 174–184. [Google Scholar] [CrossRef] [PubMed]
- Pepperell, E.; Corke, P.I.; Milford, M.J. All-Environment Visual Place Recognition with SMART. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Hong Kong, China, 31 May–7 June 2014; pp. 1612–1618. [Google Scholar]
- Milford, M.J.; Wyeth, G.F.; Prasser, D. RatSLAM: A Hippocampal Model for Simultaneous Localization and Mapping. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 1, pp. 403–408. [Google Scholar]
- Milford, M.; Wyeth, G. Persistent navigation and mapping using a biologically inspired SLAM system. Int. J. Robot. Res. 2010, 29, 1131–1153. [Google Scholar] [CrossRef]
- Labbe, M.; Michaud, F. Appearance-Based Loop Closure Detection for Online Large-Scale and Long-Term Operation. IEEE Trans. Robot. 2013, 29, 734–745. [Google Scholar] [CrossRef]
- Chen, Z.; Jacobson, A.; Erdem, U.; Hasselmo, M.; Milford, M. Multi-Scale Bio-Inspired Place Recognition. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1895–1901. [Google Scholar]
- Arroyo, R.; Alcantarilla, P.; Bergasa, L.; Yebes, J.; Gamez, S. Bidirectional Loop Closure Detection on Panoramas for Visual Navigation. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 1378–1383. [Google Scholar]
- Arroyo, R.; Alcantarilla, P.F.; Bergasa, L.; Yebes, J.J.; Bronte, S. Fast and Effective Visual Place Recognition Using Binary Codes and Disparity Information. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 3089–3094. [Google Scholar]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-Time Single Camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed]
- Arroyo, R.; Alcantarilla, P.; Bergasa, L.; Romera, E. Towards Life-Long Visual Localization Using an Efficient Matching of Binary Sequences From Images. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6328–6335. [Google Scholar]
- Sünderhauf, N.; Shirazi, S.; Dayoub, F.; Upcroft, B.; Milford, M. On the Performance of ConvNet Features for Place Recognition. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 4297–4304. [Google Scholar]
- Wang, H.; Zhao, D.; Ma, H.; Xu, H.; Hou, X. Crowdsourcing Based Mobile Location Recognition with Richer Fingerprints from Smartphone Sensors. In Proceedings of the 2015 IEEE 21st International Conference on Parallel and Distributed Systems (ICPADS), Melbourne, VIC, Australia, 14–17 December 2015; pp. 156–163. [Google Scholar]
- Bisio, I.; Lavagetto, F.; Marchese, M.; Sciarrone, A. GPS/HPS-and Wi-Fi Fingerprint-Based Location Recognition for Check-In Applications Over Smartphones in Cloud-Based LBSs. IEEE Trans. Multimed. 2013, 15, 858–869. [Google Scholar] [CrossRef]
- Cadena, C.; Galvez-López, D.; Tardos, J.D.; Neira, J. Robust Place Recognition With Stereo Sequences. IEEE Trans. Robot. 2012, 28, 871–885. [Google Scholar] [CrossRef]
- Stalbaum, J.; Song, J.B. Geometric Descriptor for Bag of Visual Words-Based Place Recognition. In Proceedings of the 11th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Kuala Lumpur, Malaysia, 12–15 November 2014; pp. 561–566. [Google Scholar]
- Neubert, P.; Sunderhauf, N.; Protzel, P. Appearance Change Prediction for Long-Term Navigation Across Seasons. 2013 European Conference on Mobile Robots (ECMR), Barcelona, Spain, 25–27 September 2013; pp. 198–203. [Google Scholar]
- Roy, N.; Newman, P.; Srinivasa, S. Visual Route Recognition with a Handful of Bits. In Robotics: Science and Systems VIII; MIT Press: Cambridge, MA, USA, 2013; p. 504. [Google Scholar]
- Sikirić, I.; Brkić, K.; Šegvić, S. Classifying traffic scenes using the GIST image descriptor. arXiv, 2013; arXiv:1310.0316. [Google Scholar]
- Oliva, A.; Torralba, A. Modeling the shape of the scene: A holistic representation of the spatial envelope. Int. J. Comput. Vis. 2001, 42, 145–175. [Google Scholar] [CrossRef]
- Chimienti, A.; Fanucci, L.; Locatelli, R.; Saponara, S. VLSI architecture for a low-power video codec system. Microelectron. J. 2002, 33, 417–427. [Google Scholar] [CrossRef]
- Garrido, M.J.; Sanz, C.; Jiménez, M.; Meneses, J.M. A flexible architecture for H. 263 video coding. J. Syst. Archit. 2003, 49, 641–661. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Different Season Couples | Method | 100% Precision (%) | 99% Precision (%) | 90% Precision (%) |
|---|---|---|---|---|
| Spring vs. Summer | SeqSLAM | 20.45 | 27.73 | 66.11 |
| LBP++GIST | 87.64 | 87.64 | 92.70 | |
| CSLBP++GIST | 87.64 | 87.64 | 93.26 | |
| Spring vs. Fall | SeqSLAM | 15.41 | 27.45 | 63.87 |
| LBP++GIST | 88.20 | 89.89 | 93.82 | |
| CSLBP++GIST | 89.33 | 91.01 | 93.28 | |
| Spring vs. Winter | SeqSLAM | 14.29 | 17.37 | 62.18 |
| LBP++GIST | 63.48 | 66.58 | 82.58 | |
| CSLBP++GIST | 60.67 | 62.92 | 82.58 | |
| Summer vs. Fall | SeqSLAM | 9.80 | 23.81 | 65.27 |
| LBP++GIST | 71.35 | 76.97 | 87.64 | |
| CSLBP++GIST | 93.26 | 95.51 | 97.19 | |
| Summer vs. Winter | SeqSLAM | 14.01 | 27.45 | 53.50 |
| LBP++GIST | 62.92 | 67.42 | 79.21 | |
| CSLBP++GIST | 64.04 | 67.98 | 80.90 | |
| Fall vs. Winter | SeqSLAM | 2.24 | 2.35 | 44.82 |
| LBP++GIST | 64.40 | 66.29 | 77.53 | |
| CSLBP++GIST | 66.85 | 67.42 | 76.97 |
| Methods | SeqSLAM | LBP++GIST | CSLBP++GIST |
|---|---|---|---|
| Time (/s) | 0.1327 | 0.1476 | 0.1226 |
| No. Images in Database | SeqSLAM | LBP++GIST | CSLBP++GIST |
|---|---|---|---|
| 200 | 3.5335 | 3.1280 | 2.9463 |
| 2000 | 54.6982 | 20.4664 | 18.3309 |
| 20,000 | 87.6982 | 33.4664 | 37.3309 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, Y.; Cappelle, C.; Ruichek, Y. Visual Localization across Seasons Using Sequence Matching Based on Multi-Feature Combination. Sensors 2017, 17, 2442. https://doi.org/10.3390/s17112442
Qiao Y, Cappelle C, Ruichek Y. Visual Localization across Seasons Using Sequence Matching Based on Multi-Feature Combination. Sensors. 2017; 17(11):2442. https://doi.org/10.3390/s17112442
Chicago/Turabian StyleQiao, Yongliang, Cindy Cappelle, and Yassine Ruichek. 2017. "Visual Localization across Seasons Using Sequence Matching Based on Multi-Feature Combination" Sensors 17, no. 11: 2442. https://doi.org/10.3390/s17112442
APA StyleQiao, Y., Cappelle, C., & Ruichek, Y. (2017). Visual Localization across Seasons Using Sequence Matching Based on Multi-Feature Combination. Sensors, 17(11), 2442. https://doi.org/10.3390/s17112442