Securing Color Fidelity in 3D Architectural Heritage Scenarios





Abstract
:
1. Introduction
Paper Contributions
2. Camera Radiometric Calibration and Color Space Transformation
3. Target Detection
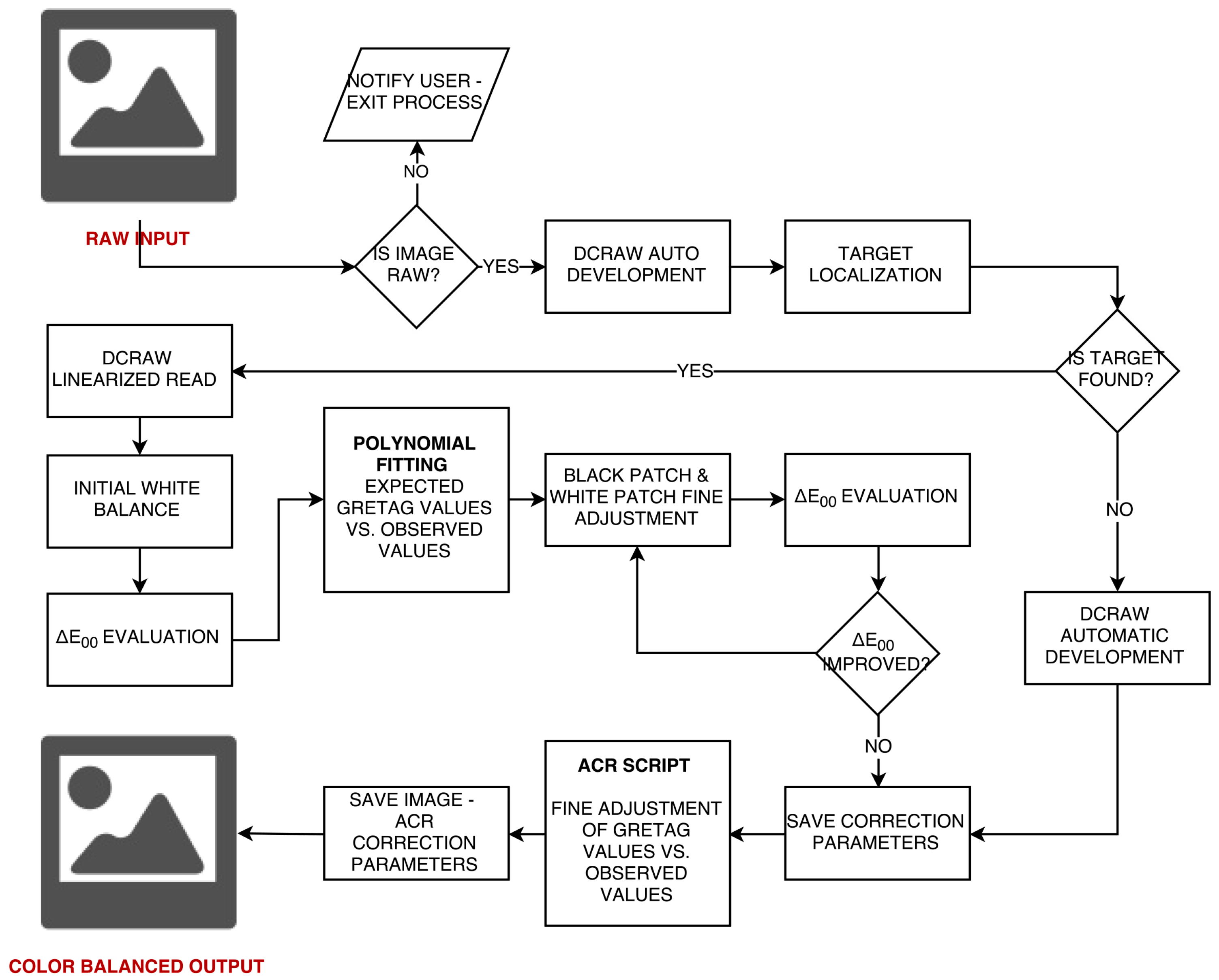
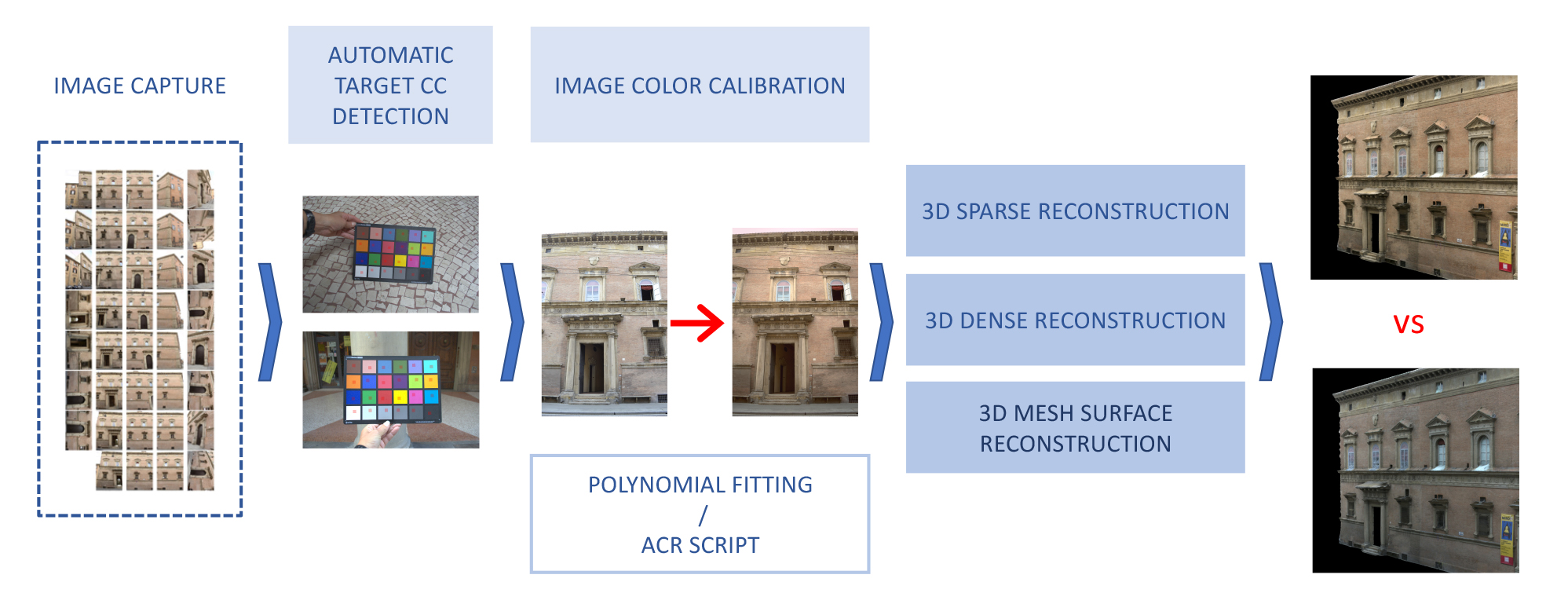
4. Developed Techniques
- RAW image 16-bit linearization and devignetting.
- Image denoise.
- ColorChecker (CC) detection.
- Exposure equalization and white balance exploiting the patch D4 of the CC.
- Polynomial fitting of observed values with expected values.
- Image correction using the fitting function found at point 3.
- Color balance of the correct image.
- ΔE*00 mean error evaluation on the CC.
- Iterative image correction using the fitting function found at point 3 increasing the degree of the polynomial at each step; iteration stops when ΔE*00 stops decreasing.
- Image correction using the new fitting function.
- ACR-like scripts calibration.
- (a)
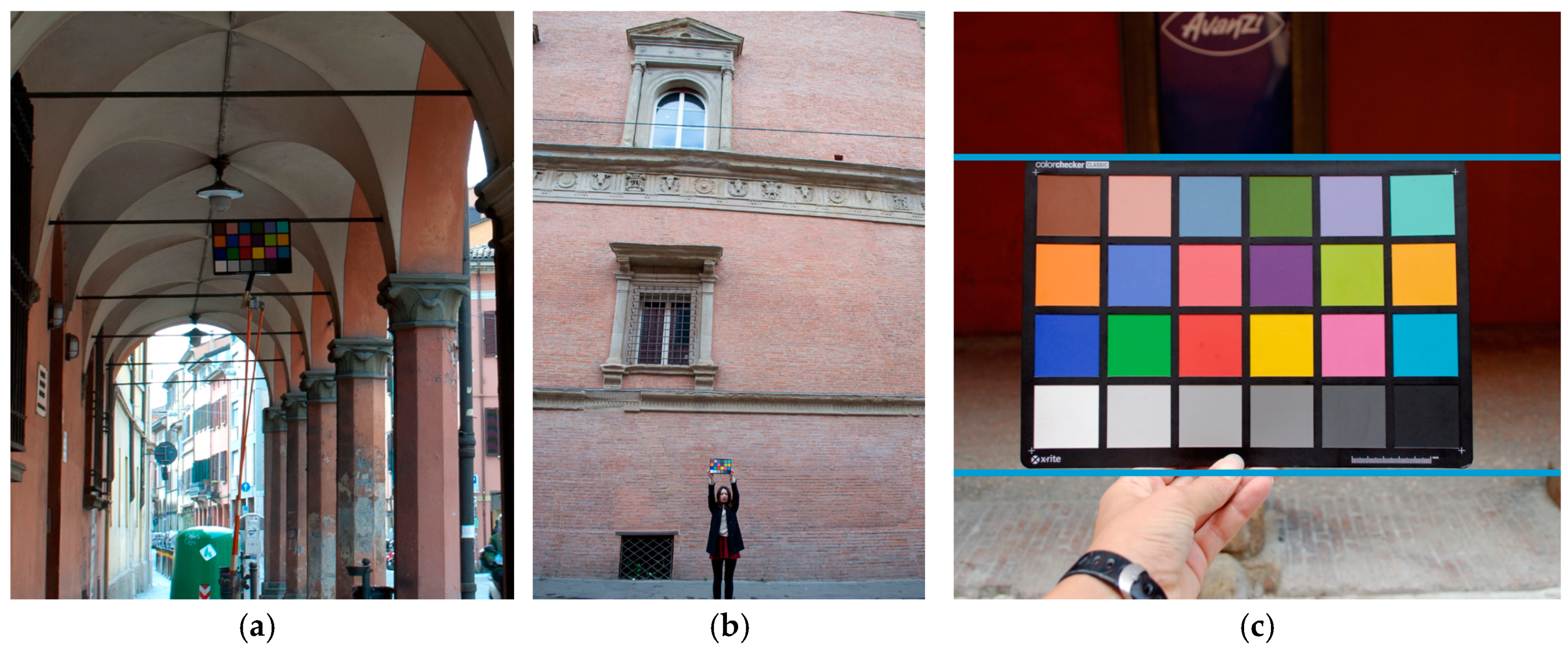
- ColorChecker detection. The solution presented in [70] has been improved correcting the failures when the target was too near to the observer, basically due to wrong exposures, non-uniform lighting of the CC, or CC warped in the image. The algorithm, if it does not find the target at first attempt, resizes the image increasingly and adds a frame of white pixels around it, to keep the initial size. After the target is found in the image resized, coordinates are brought back to the original ones. A further step was added to avoid residual failures switching to the original solution [69] allowing to enable the search of the CC outside of the found approximate region of interest (ROI) (Figure 4).
- (b)
- RAW image linearization. It is possible that the camera applied a non-linear transformation to the sensor data for storage purposes (e.g., Nikon cameras). However, to calculate the color correction that can be applied to images in order to achieve optimum color reproduction, which is defined as the colors that have minimum color error on the test chart of choice, it is very important that the image is properly linearized because the corrections algorithm operates on linear R, G, B values and the RAW file is not usually a linear image. The image was then linearized to CIEXYZ color space and 16-bit encoding to work without missing information. The developed solution exploits the RAW decoder DCRaw, setting a 16-bit output with fixed white level, gamma equal to 1 and ignoring the image own histogram. This allows to perform both linearization and conversion of linearized values into CIEXYZ tristimulus values. It is a well-known fact that a channel response processing by on-board software is introduced by manufacturers to minimize CCD construction problems, but this handling generates non-linearities. However, we do not introduce further processing to fix these non-linearities than the modifications already made by DCRaw. Although this solution is not accurate as the ‘ad hoc’ solution illustrated in [38], we ensure that the final result is sufficiently accurate due to the DCRaw ability to take into account the camera's built-in features.
- (c)
- Exposure equalization and white balance. First step of color correction consists of a white balance and exposure equalization against a specific patch. White balance was performed with a linear transformation against the patch D4 of the CC. As demonstrated in Viggiano [77] white balancing using an illuminant-dependent characterization produce consistently good results.
- (d)
- Denoise. To limit image noise and their amplification in color correction a solution for evaluating noise before and after color correction and automatically applying the denoise algorithm to the corrected image has been developed. The solution suggested here is based on three observations:
- -
- noise can be very low in digital SLRs, and practically reduced to zero for low speed;
- -
- as the camera ISO increase, the amount of noise automatically increases as well;
- -
- data captured from the color filter array (CFA) cannot be displayed before further steps: white balance and demosaicing and the color transformations, which adapt the linear to the lightness data to those adapted to the monitor gamma and color space. Through demosaicing the noise is spatially and chromatically correlated and through the nonlinear color transformations the noise distribution is unknown. As this last noise characteristic cannot be easily incorporated into the denoising methods, denoising has been applied to the raw CFA data (the mosaicked data linear to the light intensity with uncorrupted noise characteristics) exploiting the observation of [78] that showed as in the raw data noise presents a known distribution, and a signal-dependent variance, which can be precisely estimated based on measurements.
- (e)
- Polynomial fitting. The generic formula of the polynomial model is as follows:where Xk, Yk and Zk are the CIE tristimulus values of the kth sample, Rk, Gk and Bk are camera signals of the kth sample, K is the number of samples in the characterization target, n is the order of the polynomial, j1, j2 and j3 are non-negative integer indices and mX, j1, j2, j3; mY, j1, j2, j3; and mZ, j1, j2, j3; are the model coefficients to be determined. Equation (6) can be expressed in matrix form:where fk is the kth camera response vector formed by the given RGB vector, gk is the kth tristimulus value vector obtained by physical measurement using a spectrophotometer and M is the mapping matrix to transform fk to the vector gk of tristimulus values. Also for the polynomial regression a least-squares method can be used to determine the matrix M based on the known camera response vector fk and the corresponding measured tristimulus values fk. Letting:results in a matrix equation:where M is a 3 by N matrix, F is an N by K matrix and G is a 3 by K matrix; N is dependent on the order n. In the above matrix equation, the matrices G and F are known and M is unknown. The least-squares solution can be modelled as:where is the two-norm, i.e., the mathematical measure of length given by ‘the square root of the squares’. When K = N, the problem in Equation (10) has a unique solution:where F−1 is the generalized inverse of matrix F. It is noted that the size of the column vector fk is determined by the order n of the polynomial according to Equation (7).
- a)
- Polynomial regression usually minimizes only the average color error, not guaranteeing a uniform accuracy across the entire color range. We observed that the preservation of achromatic colors as achromatic allows to minimize peak of error and to minimize white point and exposure errors, i.e., necessary prerequisites for hue-plane preservation;
- b)
- The weighted least squares solution assumes response data of equal quality and, therefore, with constant variance. In presence of poor quality data (a condition not unusual in the field), this assumption is violated and the fit might be incorrect.
- c)
- A higher color dominant in the corrected image (even with a low mean ΔE*00 error) does not allow good results with the ACR scripts algorithm, which tends to converge towards less efficient solutions than the ones achieved with images where the achromatic component is correct.
- (f)
- Color correction refinement. This step consists on a rewritten MATLAB version of the Adobe Camera Raw (ACR) calibration scripts coming from Bruce Fraser’s calibration procedure for successive approximations [80]. This algorithm allows to optimize polynomial regression results and to avoid error due to illumination changes. It exploits a feature on which ACR is originally based to overcome the problem that most cameras respond very differently to tungsten light than to daylight because of their much more sensitivity to red light than to blue. For each supported camera, Camera Raw contains two built-in profiles: one related to a tungsten light source, one related to a daylight light source. Camera Raw’s White Balance tools—the Temperature and Tint sliders—interpolate between (or even extrapolate beyond) these two built-in profiles.
- (g)
- Color space choice and gamma. In the color correction process, a key-point is the use of appropriate color spaces in which to apply the color correction algorithms given above and the scene-referred non-linear color space (e.g., sRGB, AdobeRGB (1998), DCI-P3) for the output images [81]. The processing color space used is the CIEXYZ taking in account the consideration that using this color space, errors calculated by the least squares fitting algorithms allows to produce final corrected images that look more closely matched to the original image [82]. Our final color space is the rendered space sRGB, the today IEC 61966-2-1 default color space for multimedia application [83]. The standard defines the relationship between the 8 bit sRGB values and the CIEXYZ values measured in comparison to the reference CRT monitor. The ITU-R BT.709 define the reference monitor’s white-point and colors, at 6500 K temperature (D65). The sRGB IEC 61966-2-1 is an excellent solution, because it is consistent from color capture with different acquisition devices (scanner and cameras), to visualization by different monitors or video-projectors. The two dominant programming interfaces for 3D graphics, OpenGL [84] and Microsoft Direct3D [85], have both incorporated support for the sRGB color space. Main downside of the sRGB color space is the gamma value built inside: the sRGB gamma cannot be expressed as a single numerical value. The overall gamma is approximately 2.2, but it consists of a linear (gamma 1.0) section near black, and a non-linear section elsewhere comprising a 2.4 exponent and a gamma changing from 1.0 through about 2.3. A second drawback concerns colors gamut, narrower than the human one. In detail sRGB color gamut does not allow to display properly saturated colors such as yellow cadmium and blue cobalt. This last weakness is not a problem in our case studies, because misrepresented colors are rarely found.
5. Performance Evaluation
- A)
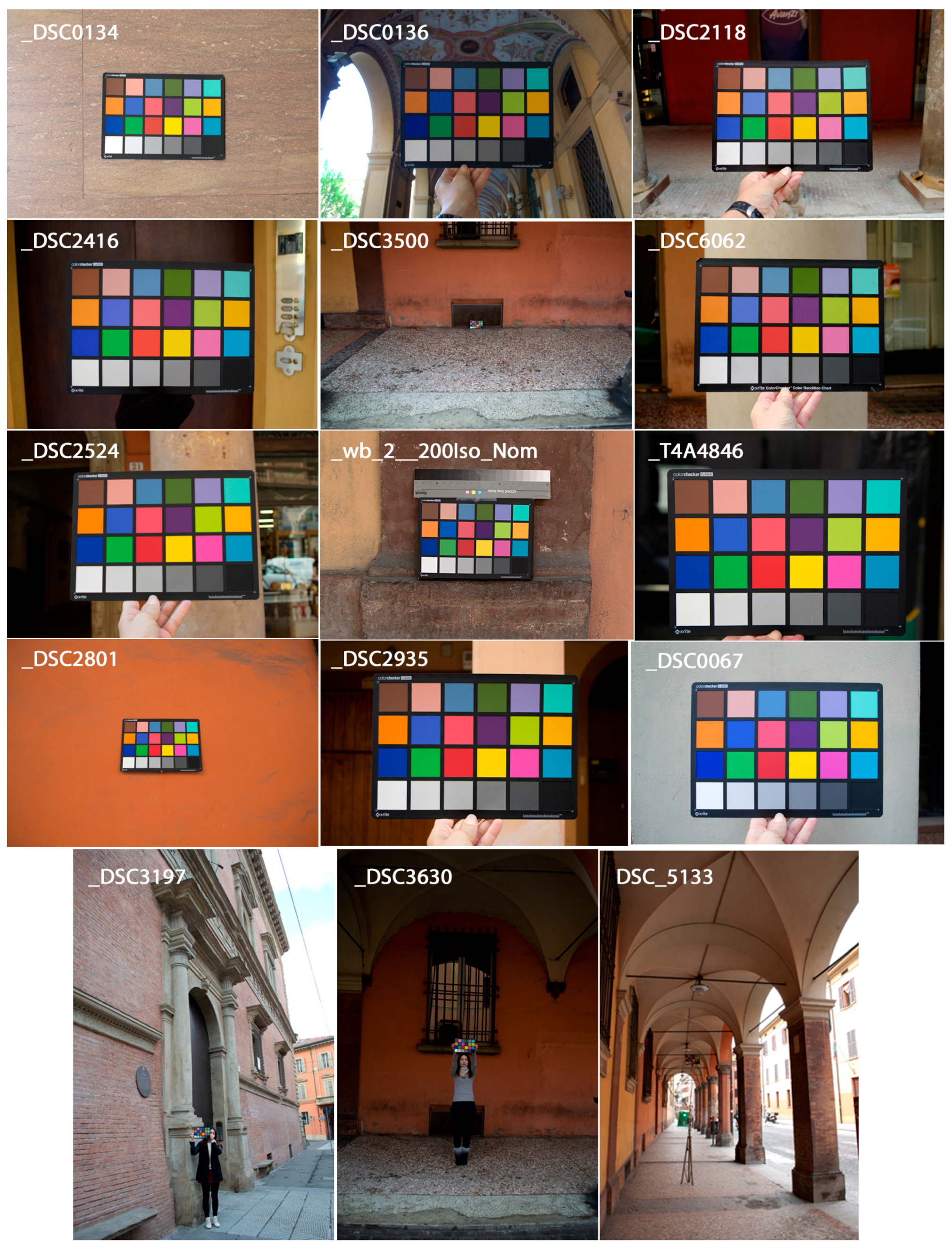
- ColorChecker finding: a standard dataset of RAW camera images (i.e., free of any color correction) in which a known color target was used (Figure 5). Three cameras (Nikon D200, Nikon D3100 and Nikon D5300 (www.nital.it)) with wide-angle lenses were used in the acquisition procedure. The dataset consisted of 15 images representing different cases and problems and the CC chart was included in every acquisition. The presented method is compared to [70] and X-Rite ColorChecker Passport Camera Calibration Software [65] on the set of 15 images depicting the target. Results are shown in Table 1, demonstrating that the presented solution outperforms the other two detection algorithms.
- B)
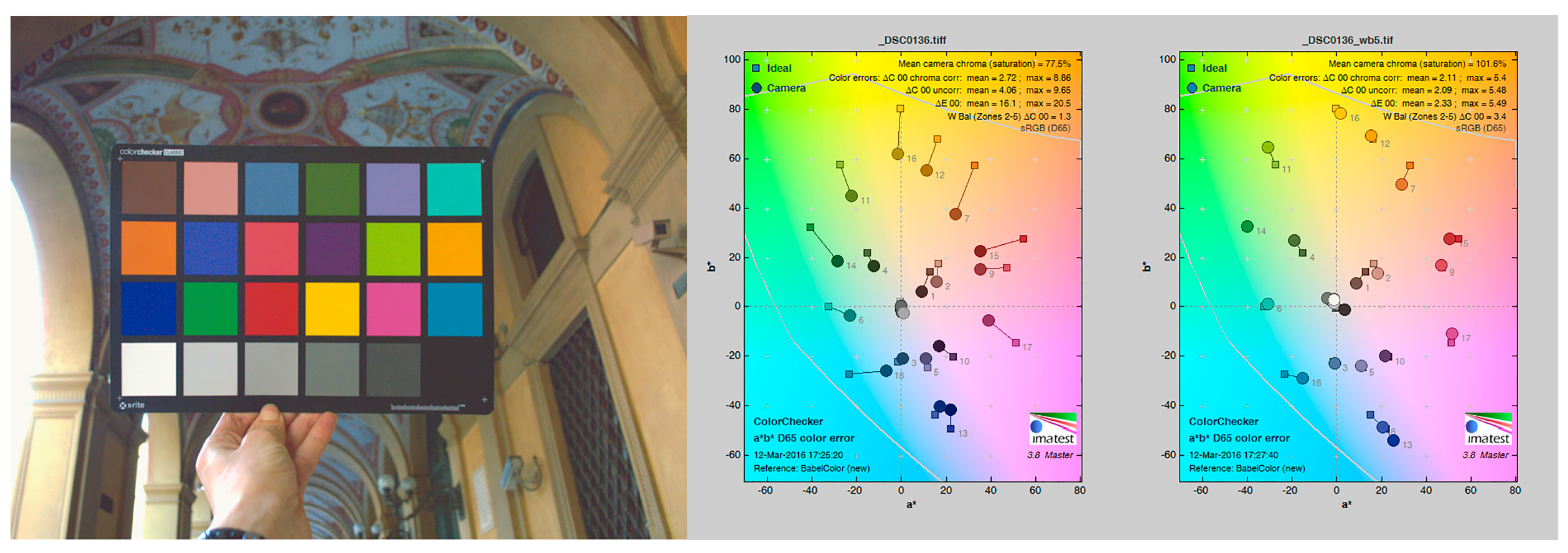
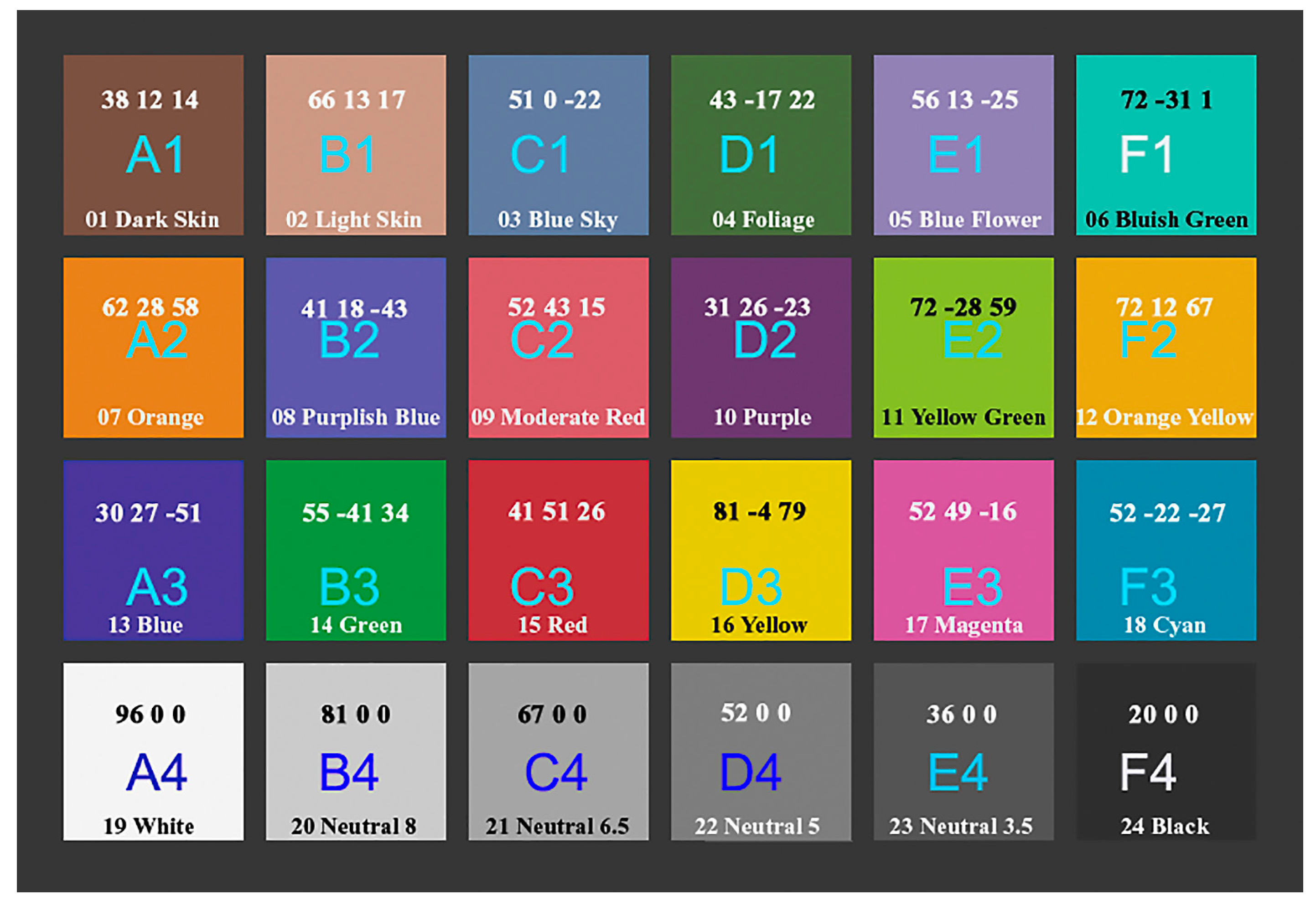
- Color fidelity: the evaluation of color accuracy, based on a CC target, comprises: a physical reference chart acquired under the current illumination (corresponding to the illumination to be discard); a reference chart color space with the ideal data values for the chart; a way to relate or convert the device color space to the reference chart color space; and a way to measure and show errors in the device’s rendering of the reference chart. Color accuracy was computed in terms of the mean camera chroma relative to the mean ideal chroma in the CIE color metric (ΔE*00) as defined in 2000 by the CIE on the CIEXYZ chromaticity diagram (Figure 6). The ΔE*00 calculation was made using the ColorChecker tool of Imatest Master software version 4.5 [66]. Exposure error in f-stops was also evaluated. Best results are obtained if it is less than 0.25 f-stops. The ΔE*00 of the automated pipeline was also compared to the result of the previous manual workflow for a subset of targets used in A. Results are in Table 2 where a great improvement over the manual solution is evident.
- C)
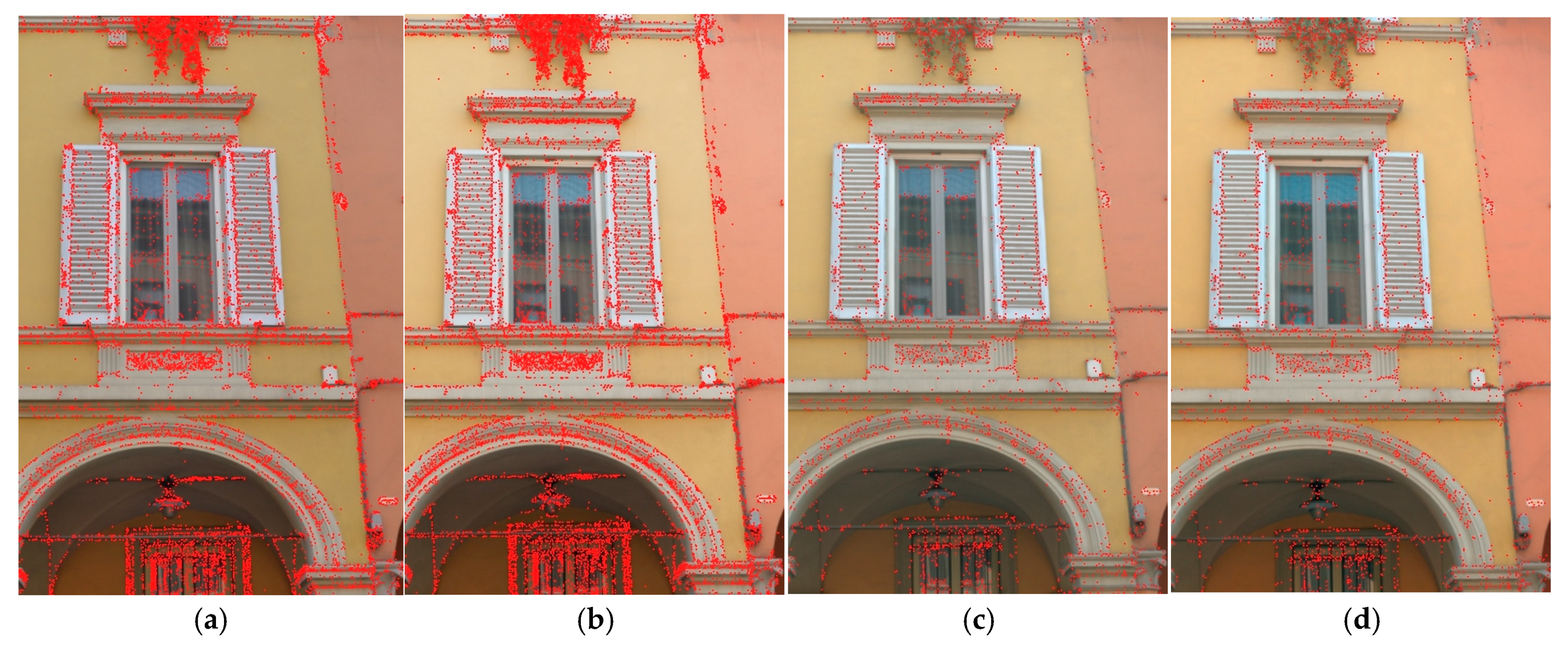
- Photogrammetric pipeline: the performances of the previously presented pre-processing are evaluated in the photogrammetric pipeline and reported using the pairwise matching efficiency, the statistical output of the bundle adjustment (re-projection error) and the number of points in the dense point cloud. Image processing has been performed using a combination of a calibrated SIFT version as detector/descriptor [86], VisualSfM as bundle adjustment [87] and n-frames SURE [88] for dense image matching. The scaling is given by topographic network. Two different image networks with different imaging configurations, textureless areas and repeated pattern/features were employed. The two datasets represent an urban test framework and summarizes a typical historical urban scenario (Figure 7 and Figure 8). Both datasets were acquired using a Nikon D3100 with an 18-mm nominal focal length and consist of convergent images and some orthogonal camera rolls. They feature many situations emblematic of failure cases, i.e., 3D scenes (non-coplanar) with homogeneous regions, distinctive edge boundaries (i.e., windows, doors, cornices), repeated patterns (recurrent architectural elements, bricks, etc.), textureless surfaces and illumination changes.
6. Conclusions and Recommendations
- -
- Target detection.
- -
- Exposure equalization and white balance.
- -
- Establishment of relationship between the spectral responsivities of the camera and the CIE color matching function.
- -
- Color balance of the image.
- -
- Color space assignment (i.e., sRGB color space).
- -
- taking pictures in the most possible homogeneous operative conditions (aperture/exposure direction and intensity of light);
- -
- taking pictures with overcast sky, so you have a diffused and uniform lighting with no obvious dominant color of the sunlight, and without shadows projection;
- -
- keeping CC surfaces with an angle of incidence with sunlight around 20–45° or less;
- -
- placing the CC, if possible, on a tripod, orthogonal to the camera optical axis to minimize the light glare and with a dark background to facilitate its detection;
- -
- taking care to avoid saturating any of the patches;
- -
- taking CC image width of 500 to 1500 pixels to ensure a correct ΔE00 analysis.
- -
- Other issues related to CC images affecting the quality of calibration could be (Figure 12):
- -
- the position of the target far from the photo center point;
- -
- the rough and irregular nature of the subject that could prevents to have CC always illuminated with the same angle of incidence, thus defeating their performance monitoring tools;
- -
- less reliable color balance results as wider is the angle between camera axis and the plane where the target lays and/or the difference between its light reflectance index and artifact one. Cause these conditions the CC leans to reflect more or less light than the material where is placed;
- -
- the distance from the camera to the CC is not critical. There is no need to fill the frame with the CC image, especially for high resolution cameras. Filling the frame may reduce accuracy if there is significant vignetting;
- -
- problems related to the position of the target in the image are minimized by the new automatic detection technique able to find CC of different size and in different position.
Author Contributions
Conflicts of Interest
References
- Hartmann, W.; Havlena, M.; Schindler, K. Recent developments in large-scale tie-point matching. ISPRS J. Photogramm. Remote Sens. 2016, 115, 47–62. [Google Scholar] [CrossRef]
- Schonberger, J.L.; Frahm, J.-M. Structure-from-motion revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4104–4113. [Google Scholar]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Record 2014, 146, 144–166. [Google Scholar] [CrossRef]
- Remondino, F.; Del Pizzo, S.; Kersten, T.P.; Troisi, S. Low-cost and Open-source solutions for automated image orientation—A critical overview. In EuroMed 2012 Proceedings; Springer: Berlin/Heidelberg, Germany, 2012; pp. 40–54. [Google Scholar]
- Musialski, P.; Wonka, P.; Aliaga, D.; Wimmer, M.; Gool, L.; Purgathofer, W. A survey of urban reconstruction. Comput. Graph. Forum 2013, 32, 146–177. [Google Scholar] [CrossRef]
- Reinhard, E.; Khan, E.A.; Akyuz, A.O.; Johnson, G. Color Imaging: Fundamentals and Applications; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Lensch, H.; Kautz, J.; Goesele, M.; Heidrich, W.; Seidel, H.-P. Image-based reconstruction of spatial appearance and geometric detail. ACM Trans. Graph. (TOG) 2003, 22, 234–257. [Google Scholar] [CrossRef]
- Gaiani, M. Color Acquisition, Management, rendering, and assessment in 3D reality-based models construction. In Handbook of Research on Emerging Digital Tools for Architectural Surveying, Modeling, and Representation; IGI Global: Hershey, PA, USA, 2015; pp. 1–43. [Google Scholar]
- Gaiani, M.; Remondino, F.; Apollonio, F.I.; Ballabeni, A. An advanced pre-processing pipeline to improve automated photogrammetric reconstructions of architectural scenes. Remote Sens. 2016, 8, 178. [Google Scholar] [CrossRef]
- Ballabeni, A.; Apollonio, F.; Gaiani, M.; Remondino, F. Advances in image pre-processing to improve automated 3D reconstruction. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 315–323. [Google Scholar] [CrossRef]
- Apollonio, F.I.; Gaiani, M.; Basilissi, W.; Rivaroli, L. Photogrammetry driven tools to support the restoration of open-air bronze surfaces of sculptures: An integrated solution starting from the experience of the Neptune Fountain in Bologna. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W3, 47–54. [Google Scholar] [CrossRef]
- Coffin, D. Dave Coffin’s DCRAW. Available online: http://www cybercom.net/~dcoffin/dcraw2006 (accessed on 10 August 2017).
- Stamatopoulos, C.; Fraser, C.; Cronk, S. Accuracy aspects of utilizing RAW imagery in photogrammetric measurement. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B5, 387–392. [Google Scholar] [CrossRef]
- Chakrabarti, A.; Scharstein, D.; Zickler, T.E. An empirical camera model for internet color vision. In Proceedings of the British Machine Vision Conference (BMVC), London, UK, 7–10 September 2009; pp. 1–11. [Google Scholar]
- Shafer, S. Using color to separate reflection components. Color Res. Appl. 1985, 10, 210–218. [Google Scholar] [CrossRef]
- Klinker, G.; Shafer, S.; Kanade, T. A physical approach to color image understanding. IJCV 1990, 4, 7–38. [Google Scholar] [CrossRef]
- Fairchild, M.D. Color Appearance Models; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Fischer, G.; Sajjaa, M. WhitebalPR—A new method for automatic white balance. In Proceedings of the Conference on Colour in Graphics, Imaging, and Vision; Society for Imaging Science and Technology: Springfield, VA, USA, 2008; pp. 202–207. [Google Scholar]
- Sharma, G. Color Fundamentals for Digital Imaging. In Digital Color Imaging Handbook; CRC Press: Boca Raton, FL, USA, 2003; Volume 20. [Google Scholar]
- Wandell, B.A. Foundations of Vision; Sinauer Associates: Sunderland, MA, USA, 1995. [Google Scholar]
- Green, P.; MacDonald, L. Colour Engineering: Achieving Device Independent Colour; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 30. [Google Scholar]
- Westland, S.; Ripamonti, C.; Cheung, V. Computational Colour Science Using MATLAB; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Debevec, P.E.; Malik, J. Recovering high dynamic range radiance maps from photographs. In SIGGRAPH’97 Proceedings; ACM Press: New York, NY, USA, 1997; pp. 369–378. [Google Scholar]
- Mitsunaga, T.; Nayar, S.K. Radiometric self-calibration. In Proceedings of the IEEE CVPR, Fort Collins, CO, USA, 23–25 June 1999; pp. 374–380. [Google Scholar]
- Lin, S.; Gu, J.; Yamazaki, S.; Shum, H.-Y. Radiometric calibration from a single image. In Proceedings of the IEEE CVPR, Washington, DC, USA, 27 June–2 July 2004. [Google Scholar]
- Shi, B.; Matsushita, Y.; Wei, Y.; Xu, C.; Tan, P. Self-calibrating photometric stereo. In Proceedings of the IEEE CVPR, San Francisco, CA, USA, 13–18 June 2010; pp. 1118–1125. [Google Scholar]
- Standardization, I.O.F. Graphic Technology and Photography—Colour Characterisation of Digital Still Cameras (DSCs) 2012. ISO 17321-1:2012. November 2012. [Google Scholar]
- Green, P. (Ed.) Color Management: Understanding and Using ICC Profiles; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Kang, H.R. Computational Color Technology; SPIE Press: Bellingham, WA, USA, 2006. [Google Scholar]
- Nyström, D. Colorimetric and multispectral image acquisition using model-based and empirical device characterization. Image Anal. 2007, 4522, 798–807. [Google Scholar]
- Wandell, B.A.; Farrell, J.E. Water into wine: Converting scanner RGB to tristimulus XYZ. Device-Indep. Color Imaging Imaging Syst. Integr. 1993, 1909, 92–100. [Google Scholar]
- Colantoni, P.; Thomas, J.B.; Hardeberg, J.Y. High-end colorimetric display characterization using an adaptive training set. J. Soc. Inf. Disp. 2011, 19, 520–530. [Google Scholar] [CrossRef]
- Bala, R.; Sharma, G.; Monga, V.; Van de Capelle, J.-P. Two-dimensional transforms for device color correction and calibration. IEEE Trans. Image Process. 2005, 14, 1172–1186. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.T.; Cho, Y.H.; Lee, C.H.; Ha, Y.H. Color look-up table design for gamut mapping and color space conversion. In Proceedings of the DPP2003: IS&T’s International Conference on Digital Production Printing and Industrial Applications, Barcelona, Spain, May 2003; pp. 28–29. [Google Scholar]
- Xia, M.; Saber, E.; Sharma, G.; Tekalp, A.M. End-to-end color printer calibration by total least squares regression. IEEE Trans. Image Process. 1999, 8, 700–716. [Google Scholar] [PubMed]
- Mendes, L.; Carvalho, P.D. Adaptive polynomial regression for colorimetric scanner calibration using genetic algorithms. In Proceedings of the IEEE International Workshop on Intelligent Signal Processing, Faro, Portugal, 1–3 September 2005; pp. 22–27. [Google Scholar]
- Hong, G.; Luo, M.R.; Rhodes, P.A. A study of digital camera colorimetric characterization based on polynomial modelling. Color Res. Appl. 2001, 26, 76–84. [Google Scholar] [CrossRef]
- Cheung, V.; Westland, S.; Connah, D.; Ripamonti, C. A comparative study of the characterisation of colour cameras by means of neural networks and polynomial transforms. Color. Technol. 2004, 120, 19–25. [Google Scholar] [CrossRef]
- McElvain, J.S.; Gish, W. Camera Color Correction Using Two-Dimensional Transforms. In Proceedings of the Color and Imaging Conference; Society for Imaging Science and Technology: Springfield, VA, USA, 2013; pp. 250–256. [Google Scholar]
- Hung, P. Color theory and its application to digital still cameras. In Image Sensors and Signal Processing for Digital Still Cameras; Nakamura, J., Ed.; CRC Press: Boca Raton, FL, USA, 2006; pp. 205–221. [Google Scholar]
- Imatest. Imatest Master, version 4.5; Imatest LLC: Boulder, CO, USA, 2017. [Google Scholar]
- Vazquez-Corral, J.; Bertalmío, M. Spectral sharpening of color sensors: Diagonal color constancy and beyond. Sensors 2014, 14, 3965–3985. [Google Scholar] [CrossRef] [PubMed]
- Ramanath, R.; Snyder, W.E.; Yoo, Y.; Drew, M.S. Color image processing pipeline. IEEE Signal Process. Mag. 2005, 22, 34–43. [Google Scholar] [CrossRef]
- Finlayson, G.D.; Drew, M.S. Constrained least-squares regression in color spaces. J. Electron. Imaging 1997, 6, 484–493. [Google Scholar] [CrossRef]
- Bianco, S.; Gasparini, F.; Russo, A.; Schettini, R. A new method for RGB to XYZ transformation based on pattern search Optimization. IEEE Trans. Consum. Electron. 2007, 53, 1020–1028. [Google Scholar] [CrossRef]
- Abed, F.M.; Berns, R.S.; Masaoka, K. Geometry-independent target-based camera colorimetric characterization. J. Imaging Sci. Technol. 2013, 57, 50503-1–50503-15. [Google Scholar] [CrossRef]
- Johnson, T. Methods for characterizing colour scanners and digital cameras. Displays 1996, 16, 183–191. [Google Scholar] [CrossRef]
- Kim, E.-S.; Lee, S.-H.; Jang, S.-W.; Sohng, K.-I. Adaptive colorimetric characterization of camera for the variation of white balance. IEICE Trans. Electron. 2005, 88, 2086–2089. [Google Scholar] [CrossRef]
- Herzog, P.G.; Knipp, D.; Stiebig, H.; Ko, F. Colorimetric characterization of novel multiple-channel sensors for imaging and metrology. J. Electron. Imaging 1999, 8, 342–353. [Google Scholar]
- Aster, R.; Borchers, B.; Thurber, C. Parameter Estimation and Inverse Problem; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Hardeberg, J.Y. Colorimetric Characterization of Digital Cameras Preserving Hue Planes. In Proceedings of the Color and Imaging Conference; Society for Imaging Science and Technology: Springfield, VA, USA, 2005; pp. 141–146. [Google Scholar]
- Finlayson, G.D.; Mackiewicz, M.; Hurlbert, A. In Root-polynomial colour correction. In Proceedings of the Color and Imaging Conference; Society for Imaging Science and Technology: Springfield, VA, USA, 2011; pp. 115–119. [Google Scholar]
- Finlayson, G.D.; Mackiewicz, M.; Hurlbert, A. Color correction using root-polynomial regression. IEEE Trans. Image Process. 2015, 24, 1460–1470. [Google Scholar] [CrossRef] [PubMed]
- Bastani, P.; Funt, B.V. Simplifying irradiance independent color calibration. In Proceedings of the SPIE 9015, Color Imaging XIX: Displaying, Processing, Hardcopy, and Applications, San Francisco, CA, USA, 3 February 2014; p. 90150N. [Google Scholar]
- Lim, S.; Silverstein, A. Spatially Varying Color Correction (SVCC) Matrices for Reduced Noise. In Proceedings of the Color and Imaging Conference; Society for Imaging Science and Technology: Springfield, VA, USA, 2004; pp. 76–81. [Google Scholar]
- Takahashi, K.; Monno, Y.; Tanaka, M.; Okutomi, M. Effective Color Correction Pipeline for a Noisy Image. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 4002–4006. [Google Scholar]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef] [PubMed]
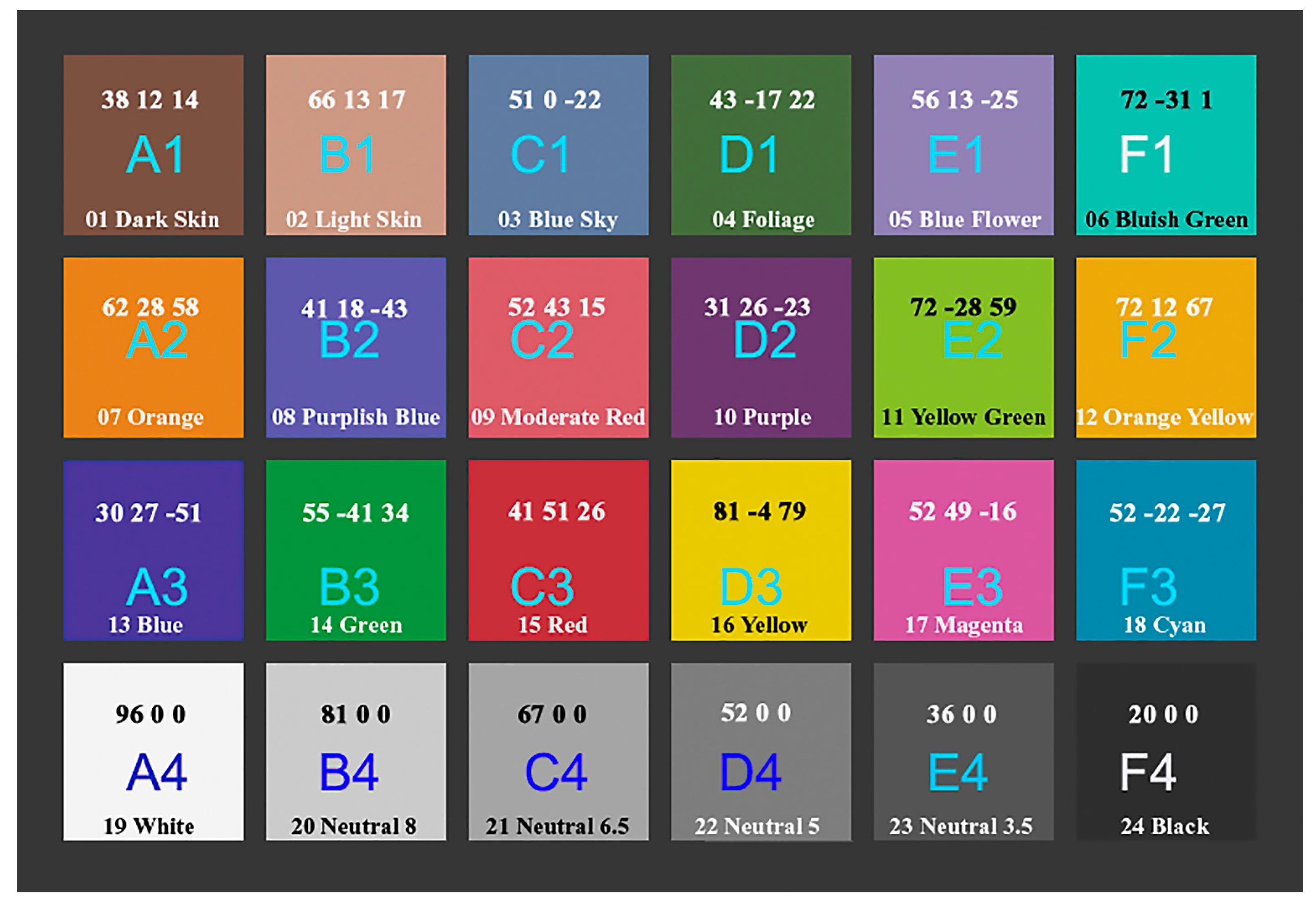
- McCamy, C.S.; Marcus, H.; Davidson, J. A color-rendition chart. J. Appl. Photogr. Eng. 1976, 2, 95–99. [Google Scholar]
- Tajbakhsh, T.; Grigat, R.-R. Semiautomatic color checker detection in distorted images. In Proceedings of the Fifth IASTED International Conference on Signal Processing, Pattern Recognition and Applications, Innsbruck, Austria, 13–15 February 2008; pp. 347–352. [Google Scholar]
- Ernst, A.; Papst, A.; Ruf, T.; Garbas, J.-U. Check my chart: A robust color chart tracker for colorimetric camera calibration. In Proceedings of the 6th International Conference on Computer Vision/Computer Graphics Collaboration Techniques and Applications, Berlin, Germany, 6–7 June 2013; p. 5. [Google Scholar]
- Kordecki, A.; Palus, H. Automatic detection of colour charts in images. Prz. Elektrotech. 2014, 90, 197–202. [Google Scholar]
- Wang, S.; Minagawa, A.; Fan, W.; Sun, J.; Xu, L. A fast and robust multi-color object detection method with application to color chart detection. In Proceedings of the Pacific Rim International Conference on Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2014; pp. 345–356. [Google Scholar]
- Liu, M.; Konya, I.; Nandzik, J.; Flores-Herr, N.; Eickeler, S.; Ndjiki-Nya, P. A new quality assessment and improvement system for print media. EURASIP J. Adv. Signal Process. 2012, 2012, 109. [Google Scholar] [CrossRef]
- Bianco, S.; Cusano, C. Color target localization under varying illumination conditions. In Proceedings of the International Workshop on Computational Color Imaging; Springer: Berlin/Heidelberg, Germany, 2011; pp. 245–255. [Google Scholar]
- X-Rite X-Rite ColorChecker Passport User Manual. Available online: http://www.xrite.com/documents/manuals/en (accessed on 10 August 2017).
- Imatest Imatest Master. Available online: http://www.imatest.com/products/imatest-master/ (accessed on 10 August 2017).
- BabelColor BabelColor PatchTool. Available online: http://www.babelcolor.com (accessed on 10 August 2017).
- Baumann, R. MacDuff: the Macbeth ColorChecker finder. Available online: http://github.com/ryanfb/macduff (accessed on 10 August 2017).
- Hirakawa, K. ColorChecker Finder. 2014. Available online: http://campus.udayton.edu/~ISSL/software (accessed on 10 August 2017).
- García Capel, L.E.; Hardeberg, J.Y. Automatic Color reference target detection. In Proceedings of the Color and Imaging Conference; Society for Imaging Science and Technology: Springfield, VA, USA, 2014; pp. 119–124. [Google Scholar]
- Sharma, G.; Wu, W.; Dalal, N. Color-Difference formula: Implementation notes, supplementary test data, and mathematical observations CIE. Color Res. Appl. 2000, 30, 21–30. [Google Scholar] [CrossRef]
- Oleari, C.; Melgosa, M.; Huertas, R. Generalization of color-difference formulas for any illuminant and any observer by assuming perfect color constancy in a color-vision model based on the OSA-UCS system. JOSA A 2011, 28, 2226–2234. [Google Scholar] [CrossRef] [PubMed]
- Melgosa, M.; Alman, D.H.; Grosman, M.; Gómez-Robledo, L.; Trémeau, A.; Cui, G.; García, P.A.; Vázquez, D.; Li, C.; Luo, M.R. Practical demonstration of the CIEDE2000 corrections to CIELAB using a small set of sample pairs. Color Res. Appl. 2013, 38, 429–436. [Google Scholar] [CrossRef]
- Pascale, D. RGB Coordinates of the Macbeth ColourChecker; The BabelColour Company: Montreal, QC, Canada, 2006; pp. 1–16. [Google Scholar]
- RawTherapee. Available online: https://github.com/Beep6581/RawTherapee (accessed on 10 August 2017).
- Sumner, R. Processing Raw Images in MATLAB. T.R.; Department of Electrical Engineering, University of California Santa Cruz: Santa Cruz, CA, USA, 2014. [Google Scholar]
- Viggiano, J.S. Comparison of the accuracy of different white balancing options as quantified by their color constancy. In Proceedings of the SPIE EI2004, San Jose, California, United States, 7 June 2004; pp. 323–333. [Google Scholar]
- Seybold, T.; Keimel, C.; Knopp, M.; Stechele, W. Towards an Evaluation of Denoising Algorithms with Respect to Realistic Camera Noise. In Proceedings of the 2013 IEEE International Symposium on Multimedia (ISM), Anaheim, CA, USA, 9–11 December 2013; pp. 203–210. [Google Scholar]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Color image denoising via sparse 3D collaborative filtering with grouping constraint in luminance-chrominance space. In Proceedings of the ICIP 2007 IEEE International Conference on Image Processing, San Antonio, TX, USA, 16 September–19 October 2007; pp. I-313–I-316. [Google Scholar]
- RAGS. 2017. Available online: http://www.rags-int-inc.com/PhotoTechStuff/ColorCalibration (accessed on 10 August 2017).
- Süsstrunk, S.; Buckley, R.; Swen, S. Standard RGB color spaces. In Proceedings of the IS&T/SID 7th Color Imaging Conference, Scottsdale, AZ, USA, 16–19 November 1999; pp. 127–134. [Google Scholar]
- Lukac, R.; Plataniotis, K.N. Single-Sensor Camera Image Processing. In Color Image Processing—Methods and Applications; CRC: Boca Raton, FL, USA, 2007; pp. 363–392. [Google Scholar]
- Stokes, M.; Anderson, M.; Chandrasekar, S.; Motta, R. A standard default color space for the internet-sRGB. 1996. Available online: http://www.w3.org/Graphics/Color/sRGB.html (accessed on 10 August 2017).
- OpenGL. Available online: http://www.opengl.org (accessed on 10 August 2017).
- Microsoft Direct3D. Available online: https://msdn.microsoft.com/en-us/library/windows/desktop/hh309466(v=vs.85). aspx (accessed on 10 August 2017).
- Lowe, D. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Wu, C.; Agarwal, S.; Curless, B.; Seitz, S.M. Multicore bundle adjustment. In Proceedings of the IEEE CVPR, Providence, RI, USA, 20–25 June 2011; pp. 3057–3064. [Google Scholar]
- Wenzel, K.; Rothermel, M.; Haala, N.; Fritsch, D. SURE—The ifp Software for Dense Image Matching; Wichmann: Berlin/Offenbach, Germany; VDE Verlag: Berlin, Germany, 2013. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Our Solution | Enhanced CCFind | X-Rite ColorChecker Passport Camera Calibration Software | |
|---|---|---|---|
| Number of ColorCheckers detected | 15 | 13 | 7 |
| File Name | ΔE*00 Manual sRGB | ΔE*00 Automated sRGB | ΔE*00 Automated ACR sRGB | Exposure Error (f-Stops) Manual sRGB | Exposure Error (f-Stops) Automated sRGB | Exposure Error (f-Stops) Automated ACR sRGB |
|---|---|---|---|---|---|---|
| _wb_2__200 | 4.65 | 2.08 | 1.86 | 0.08 | 0.01 | 0.03 |
| _DSC2524 | 3.84 | 1.56 | 1.56 | 0.13 | 0.02 | 0.02 |
| _T4A4846 | 4.42 | 4.19 | 4.09 | 0.07 | −0.02 | 0.06 |
| _DSC2801 | 4.36 | 1.85 | 1.59 | 0.18 | 0.02 | 0.09 |
| _DSC2935 | 3.92 | 2.83 | 2.79 | 0.09 | 0.04 | 0.18 |
| _DSC0134 | 4.47 | 2.29 | 2.29 | 0.19 | 0.01 | 0.01 |
| _DSC0136 | 16.1 | 2.85 | 2.85 | 1.19 | 0.00 | 0.00 |
| _DSC2118 | 7.98 | 1.75 | 1.75 | 0.41 | 0.02 | 0.02 |
| _DSC2416 | 5.92 | 2.60 | 2.60 | 0.09 | 0.02 | 0.02 |
| _DSC6062 | 5.71 | 1.87 | 1.73 | 0.04 | −0.02 | −0.04 |
| Mean error | 6.137 | 2.387 | 2.311 | 0.247 | 0.010 | 0.044 |
| Standard deviation | 3.714 | 0.779 | 0.796 | 0.348 | 0.019 | 0.060 |
| No Enhancement | Manually Enhanced | Automatically Enhanced | Automatically Enhanced—ACR | |
|---|---|---|---|---|
| Oriented images | 34 | 39 | 39 | 39 |
| RMS re-projection error | 0.286 | 0.185 | 0.313 | 0.250 |
| Points from more than 3 cameras | 51,163 | 197,969 | 82,988 | 115,048 |
| 3D points in the dense point cloud | 65,194,066 | 80,369,256 | 80,473,354 | 80,731,021 |
| Inlier matches _DSC7061 _DSC7062 | 7770 | 6095 | 6028 | 6131 |
| No Enhancement | Manually Enhanced | Automatically Enhanced | Automatically Enhanced—ACR | |
|---|---|---|---|---|
| Oriented images | 26 | 27 | 28 | 32 |
| RMS reprojection error | 0.816 | 1.050 | 0.558 | 0.536 |
| Points from more than 3 cameras | 6005 | 7967 | 7645 | 7729 |
| 3D points in the dense point cloud | 21,116,172 | 23,807,743 | 19,165,033 | 23,348,061 |
| Inlier matches_DSC6702 _DSC6703 | 1985 | 967 | 2082 | 2001 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gaiani, M.; Apollonio, F.I.; Ballabeni, A.; Remondino, F. Securing Color Fidelity in 3D Architectural Heritage Scenarios. Sensors 2017, 17, 2437. https://doi.org/10.3390/s17112437
Gaiani M, Apollonio FI, Ballabeni A, Remondino F. Securing Color Fidelity in 3D Architectural Heritage Scenarios. Sensors. 2017; 17(11):2437. https://doi.org/10.3390/s17112437
Chicago/Turabian StyleGaiani, Marco, Fabrizio Ivan Apollonio, Andrea Ballabeni, and Fabio Remondino. 2017. "Securing Color Fidelity in 3D Architectural Heritage Scenarios" Sensors 17, no. 11: 2437. https://doi.org/10.3390/s17112437
APA StyleGaiani, M., Apollonio, F. I., Ballabeni, A., & Remondino, F. (2017). Securing Color Fidelity in 3D Architectural Heritage Scenarios. Sensors, 17(11), 2437. https://doi.org/10.3390/s17112437