A High Stability Time Difference Readout Technique of RTD-Fluxgate Sensors

Abstract
:1. Introduction
2. Working Principle of RTD-Fluxgate Sensors and Stability Analysis of Time Difference Detection
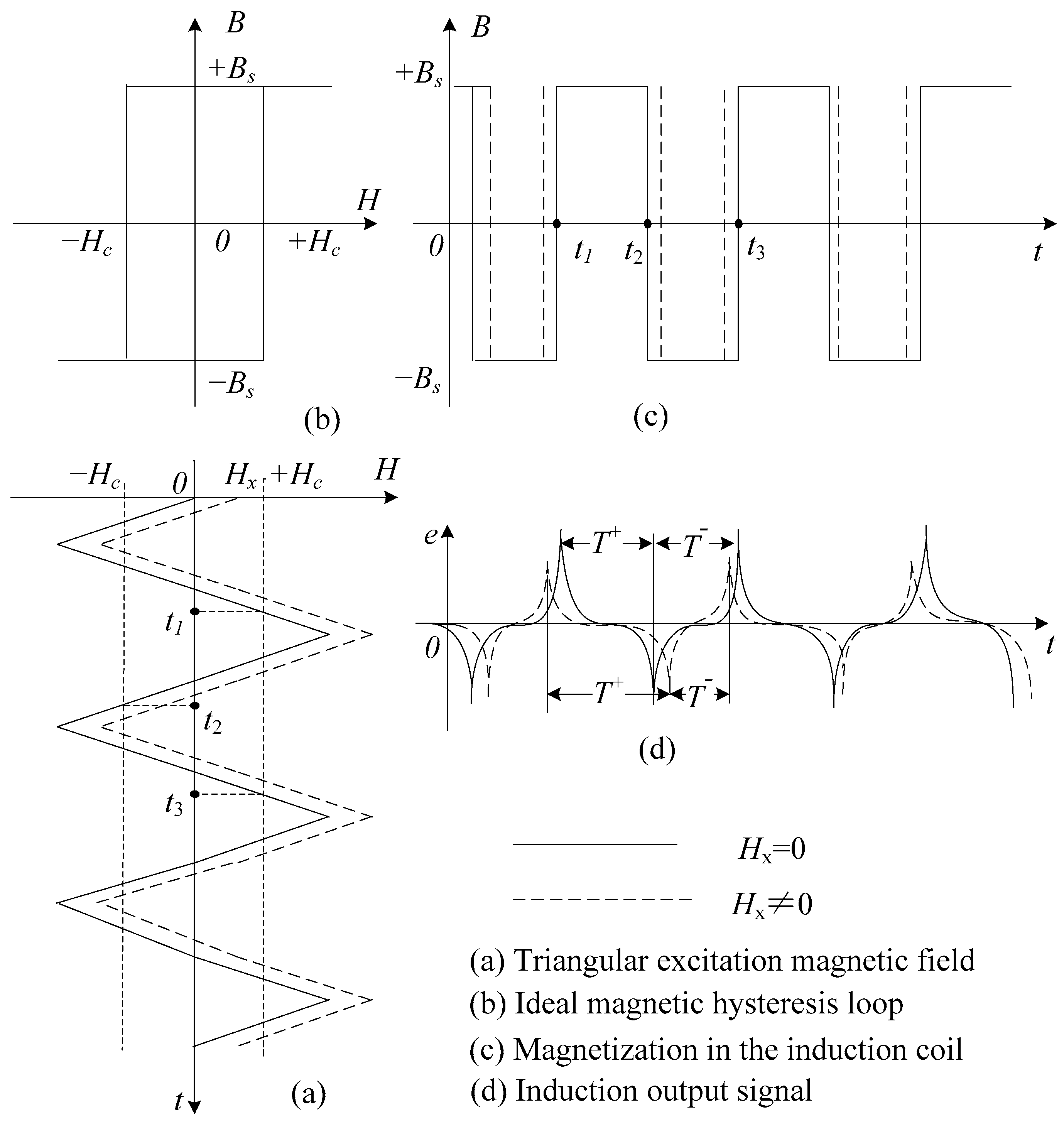
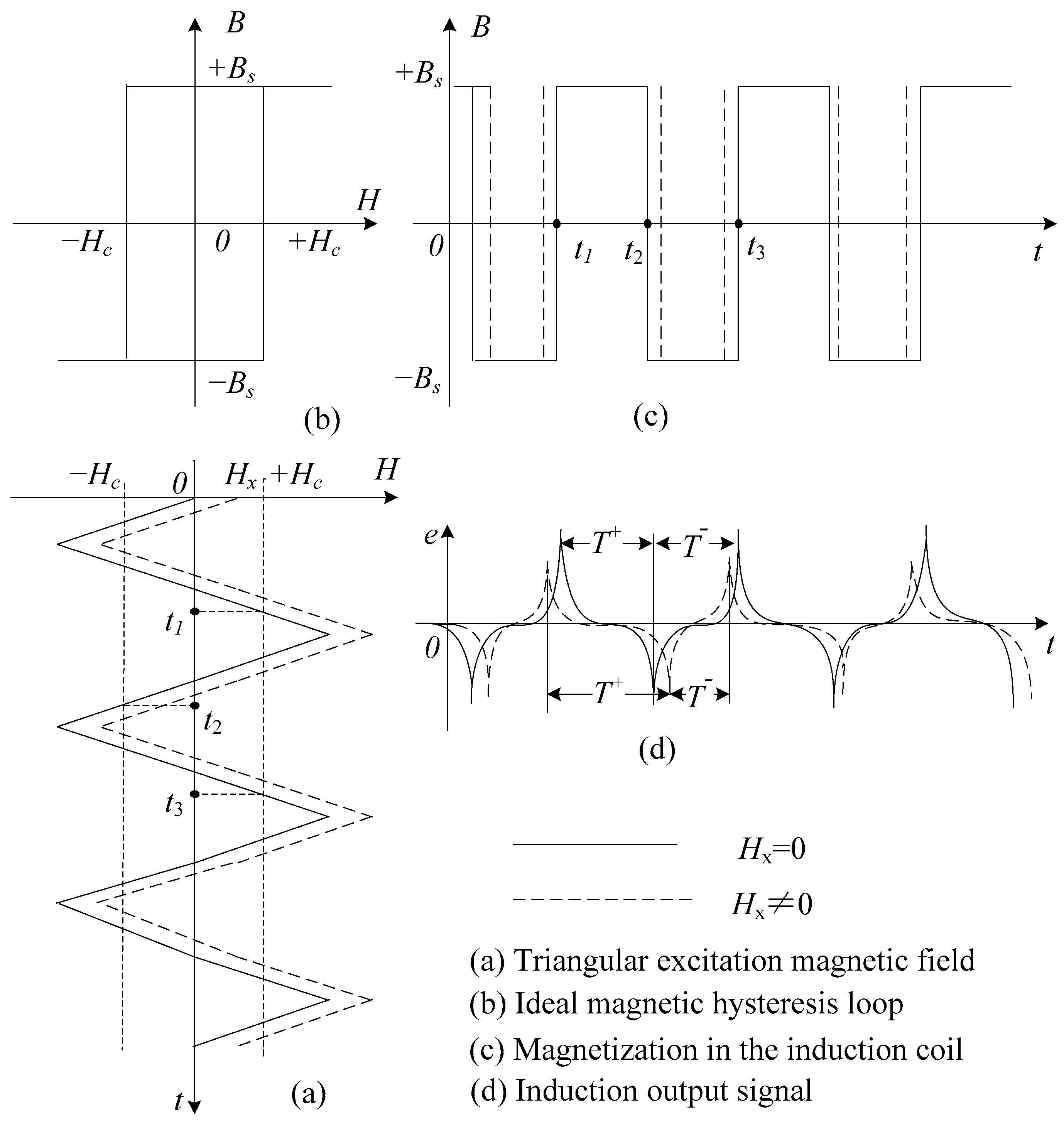
2.1. Working Principle of RTD-Fluxgate Sensors under Triangular Excitation Signal
2.2. Stability Analysis of BMSTD Readout Technology
3. The Mathematical Output Response Model of the NMST Readout Technique and Stability Analysis
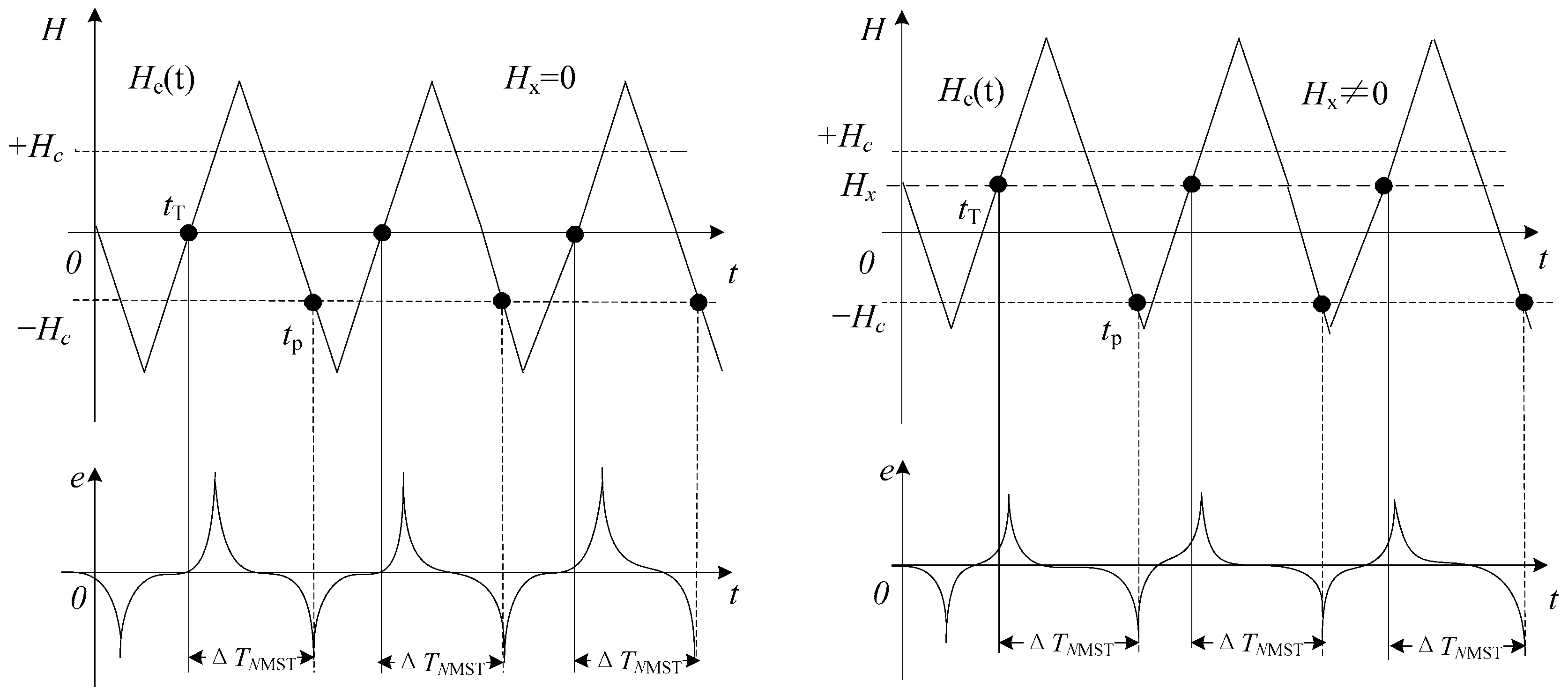
3.1. The NMST Readout Technique and the Mathematical Output Response Model
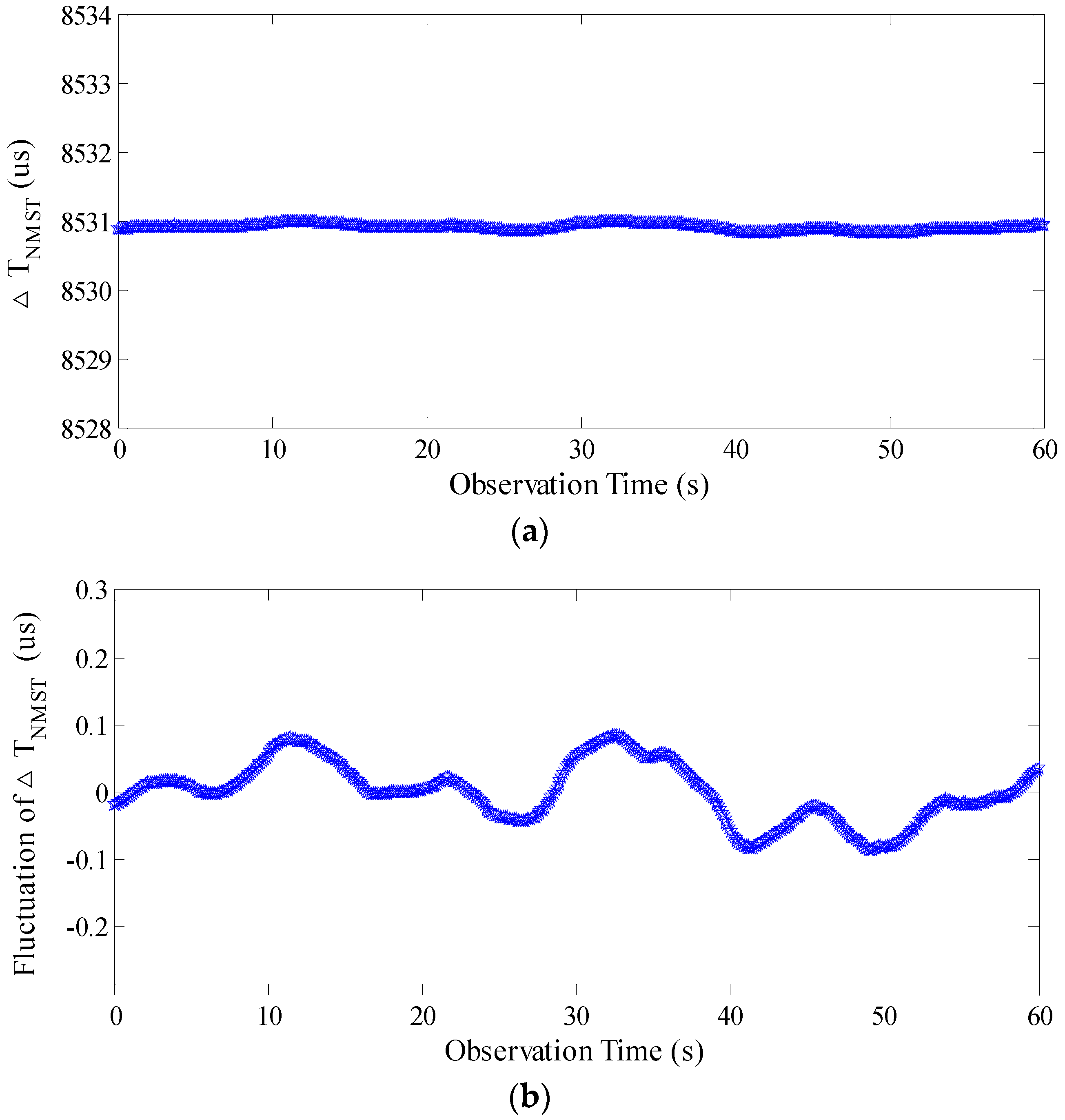
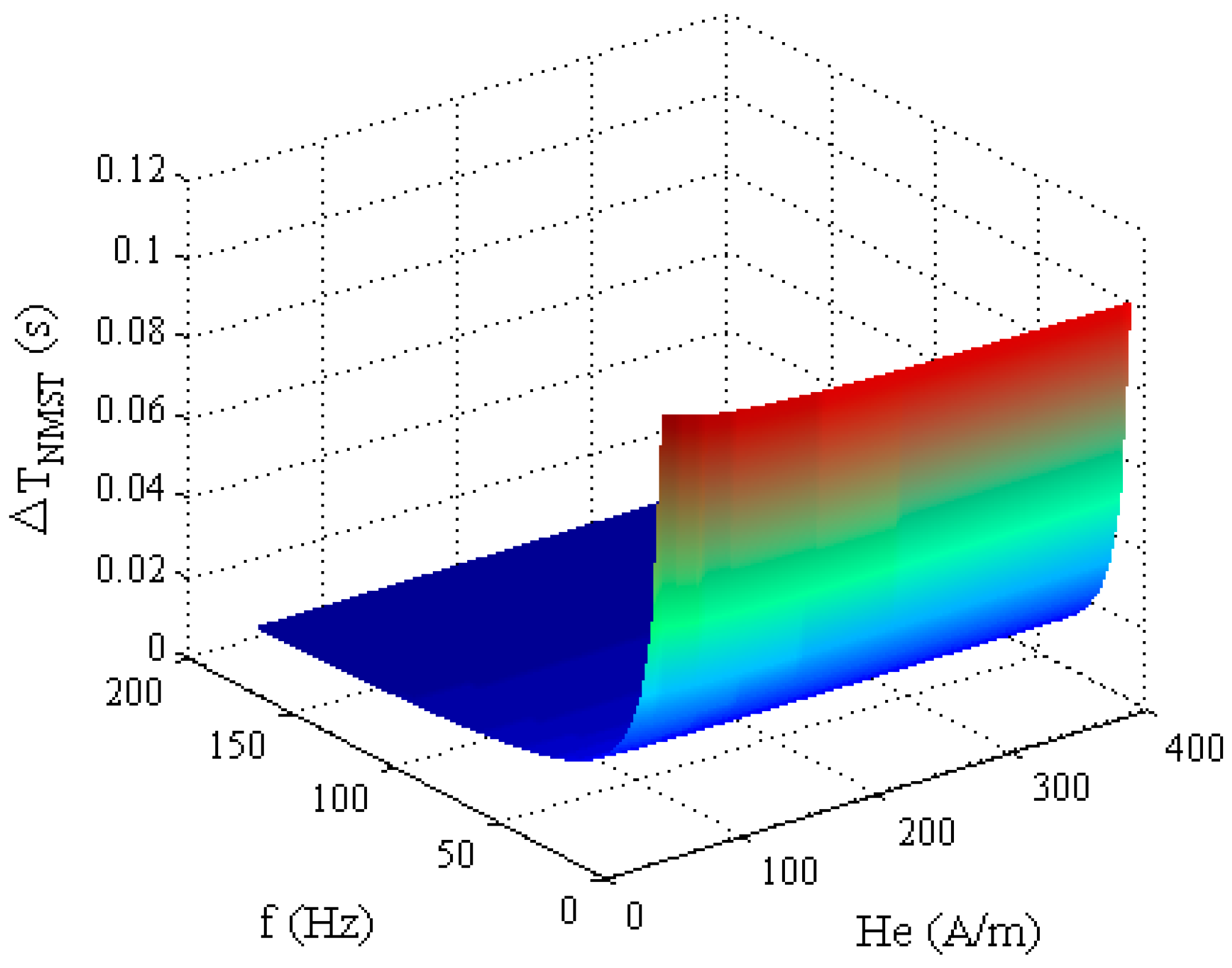
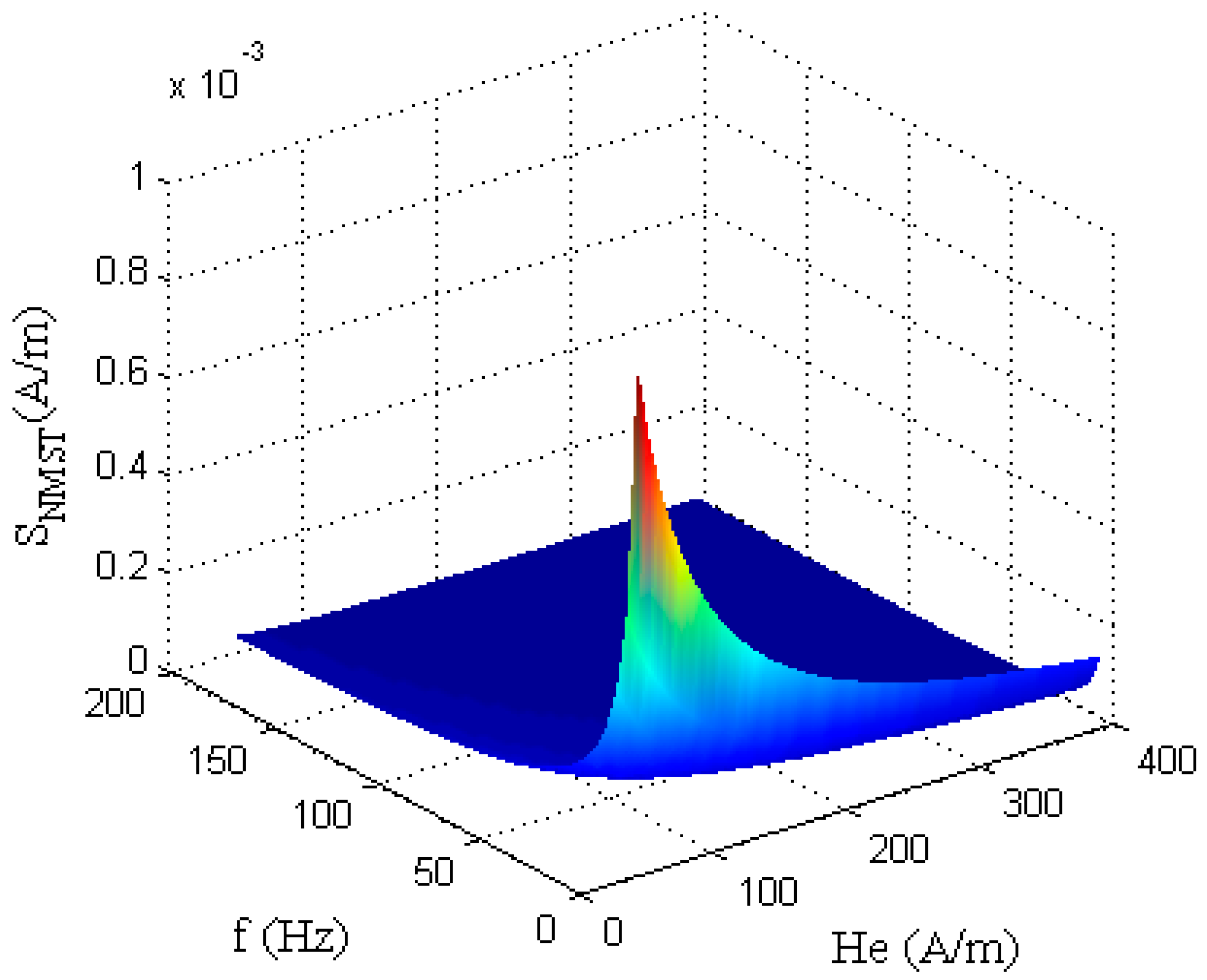
3.2. Stability Analysis of NMST Readout Technology
4. Experiments and Preliminary Results
- (1)
- Relationship between the Hx and ΔTNMST
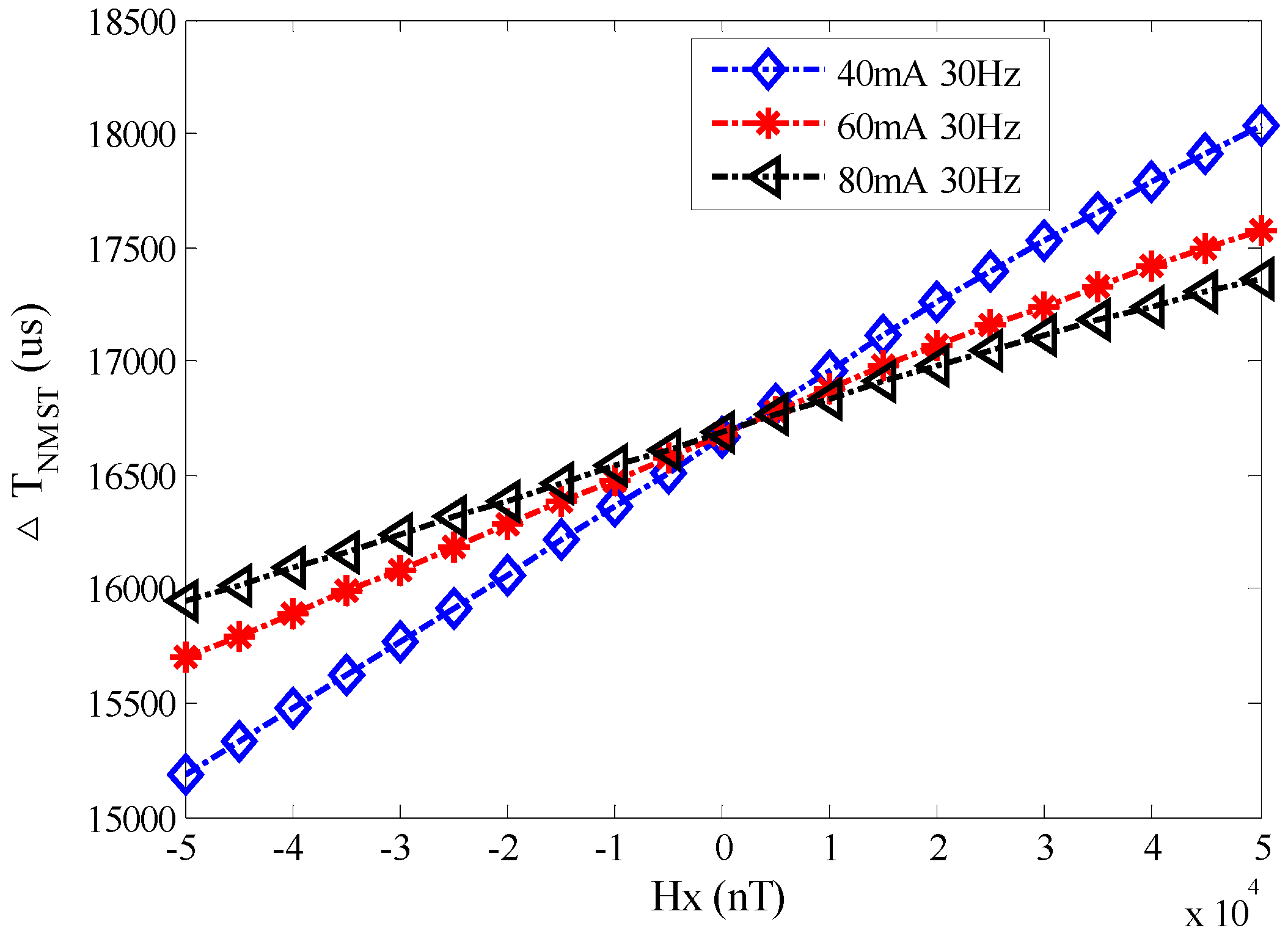
- (a)
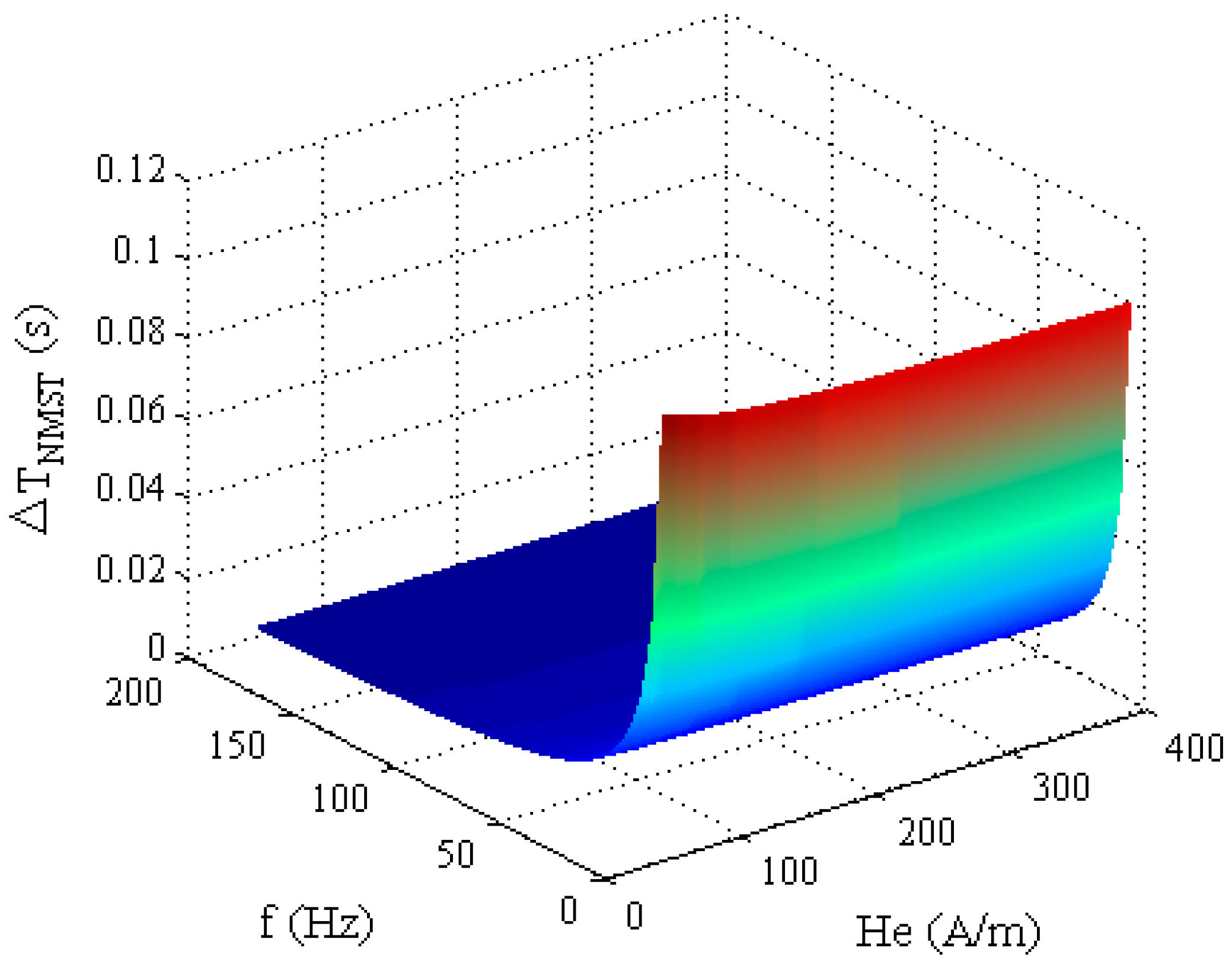
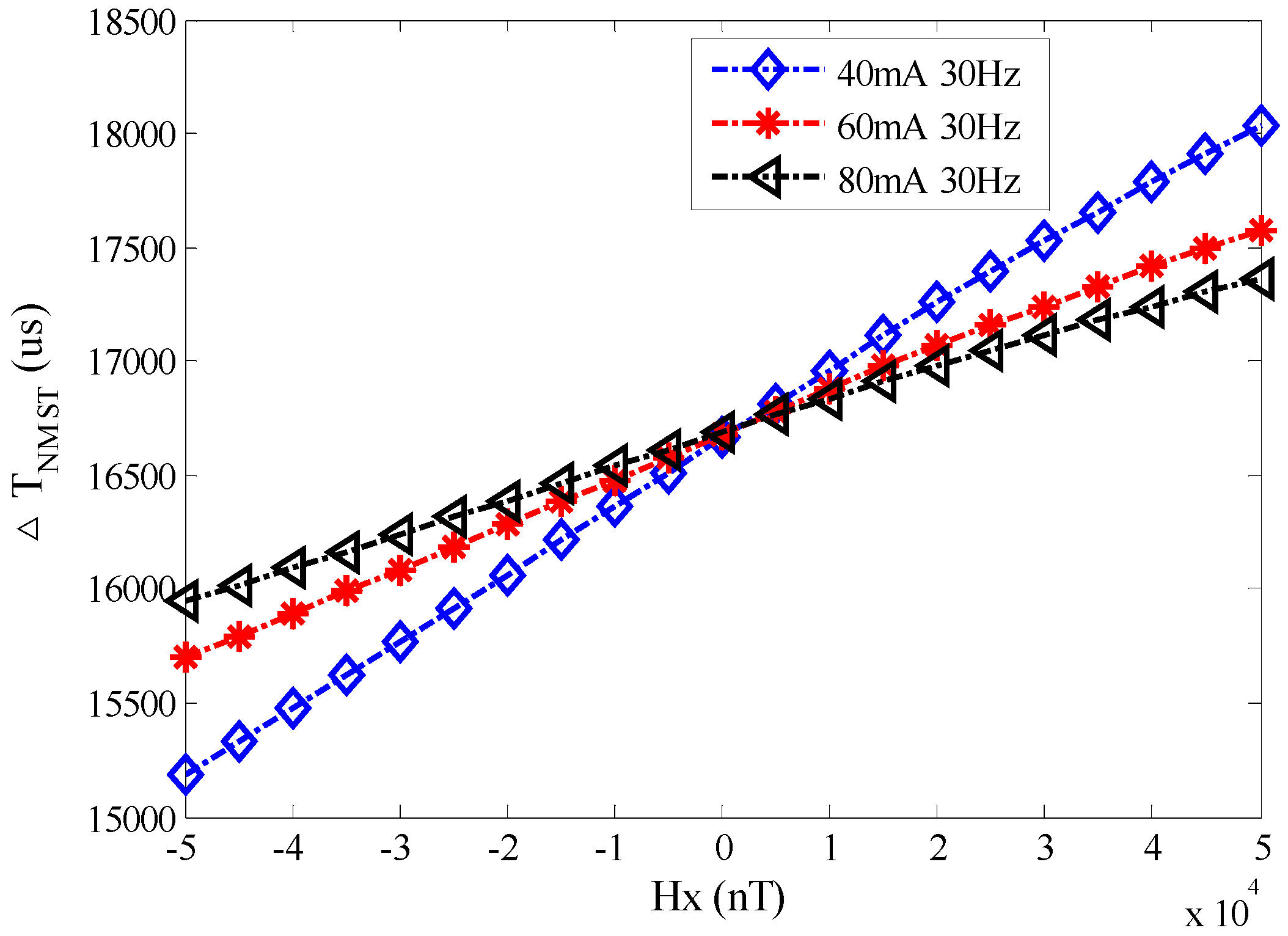
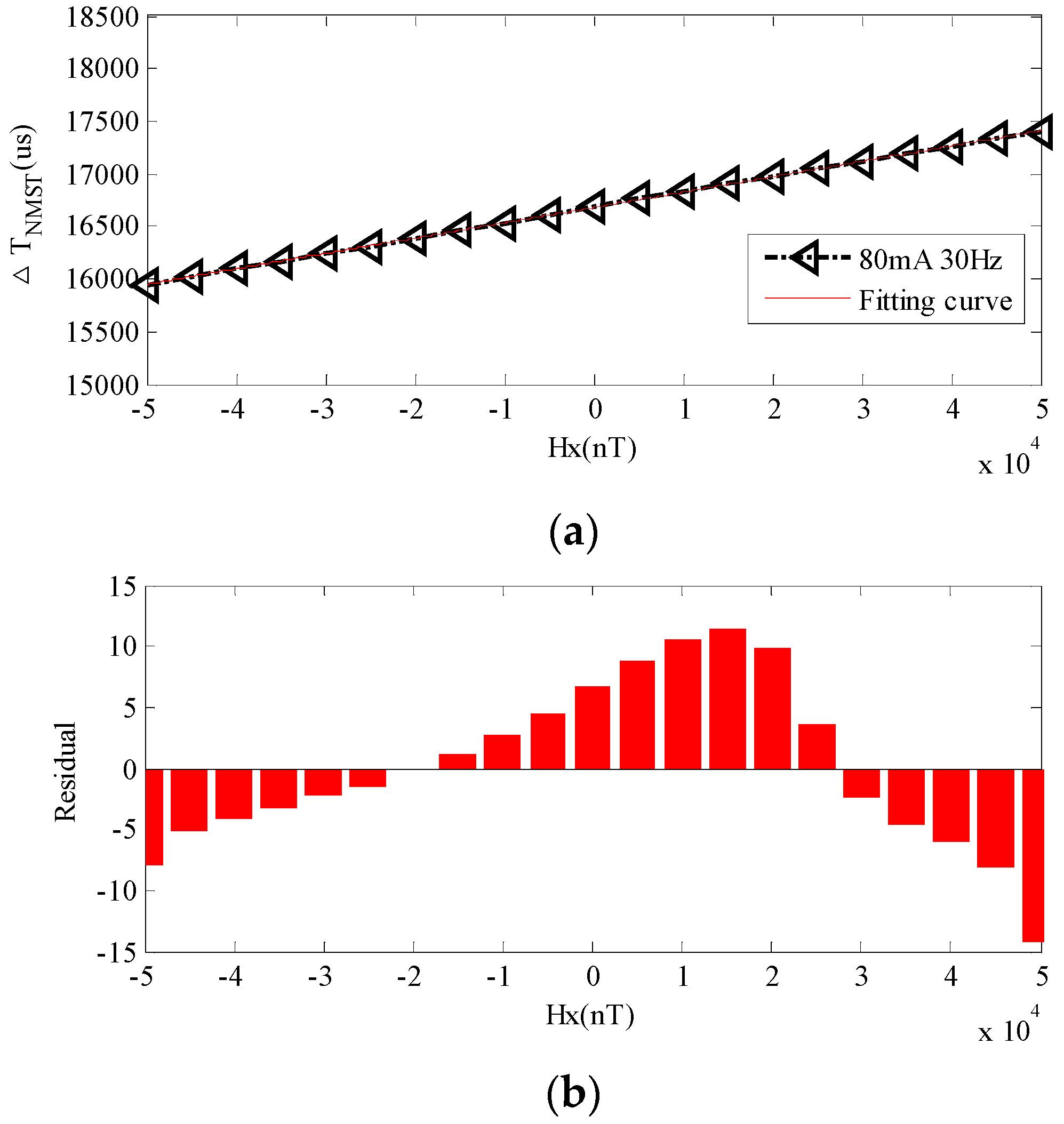
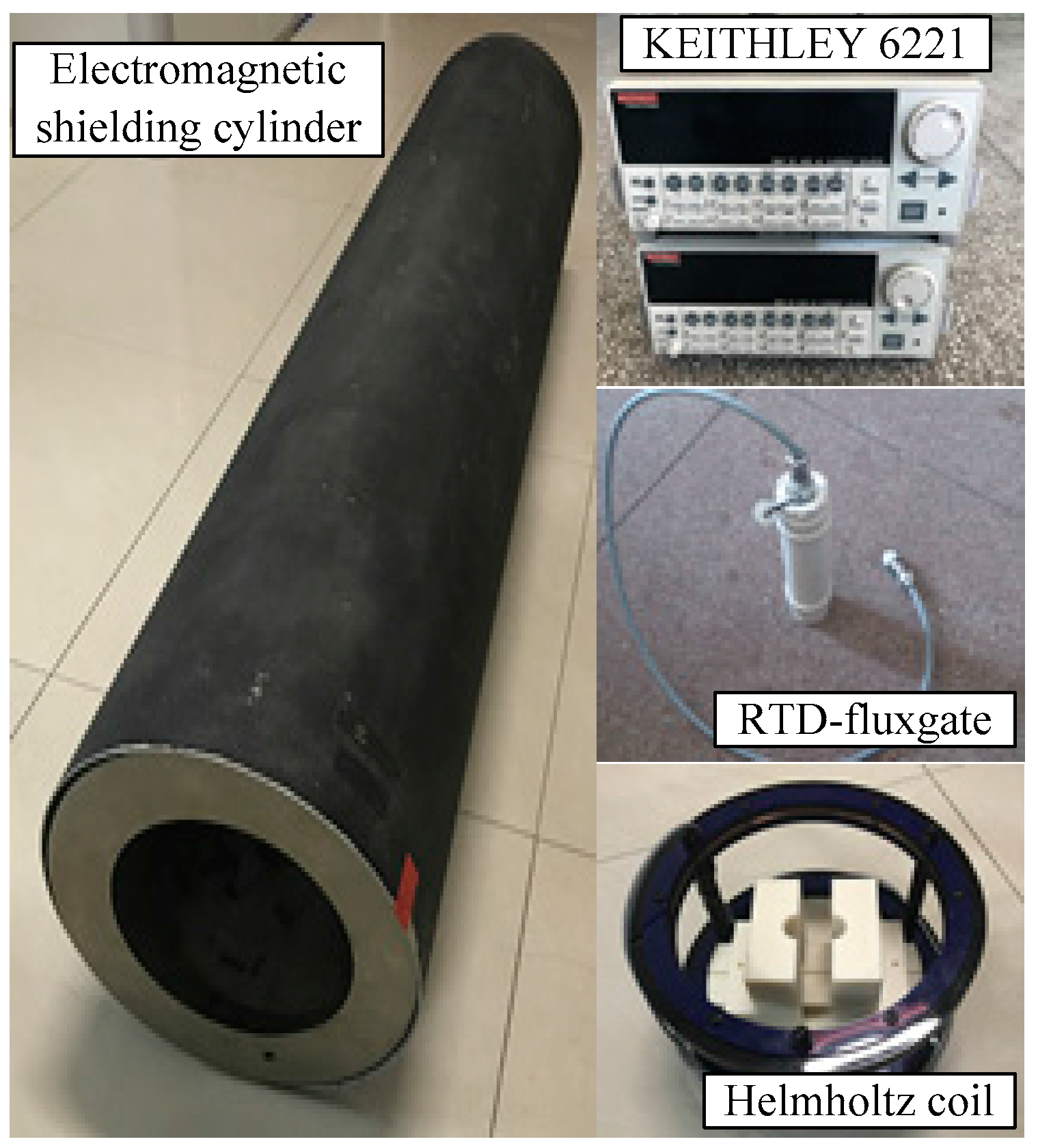
- The experiments are performed in the following conditions of different triangular excitation magnetic fields (excitation current from 40 mA to 80 mA with a 20 mA interval and excitation frequency at 30 Hz) and a range of Hx from −5 × 104 nT to 5 × 104 nT with a 5 × 103 nT interval. Figure 10 shows the output time difference, ΔTNMST, of the RTD-fluxgate which are actually measured with different excitation currents.
- (b)
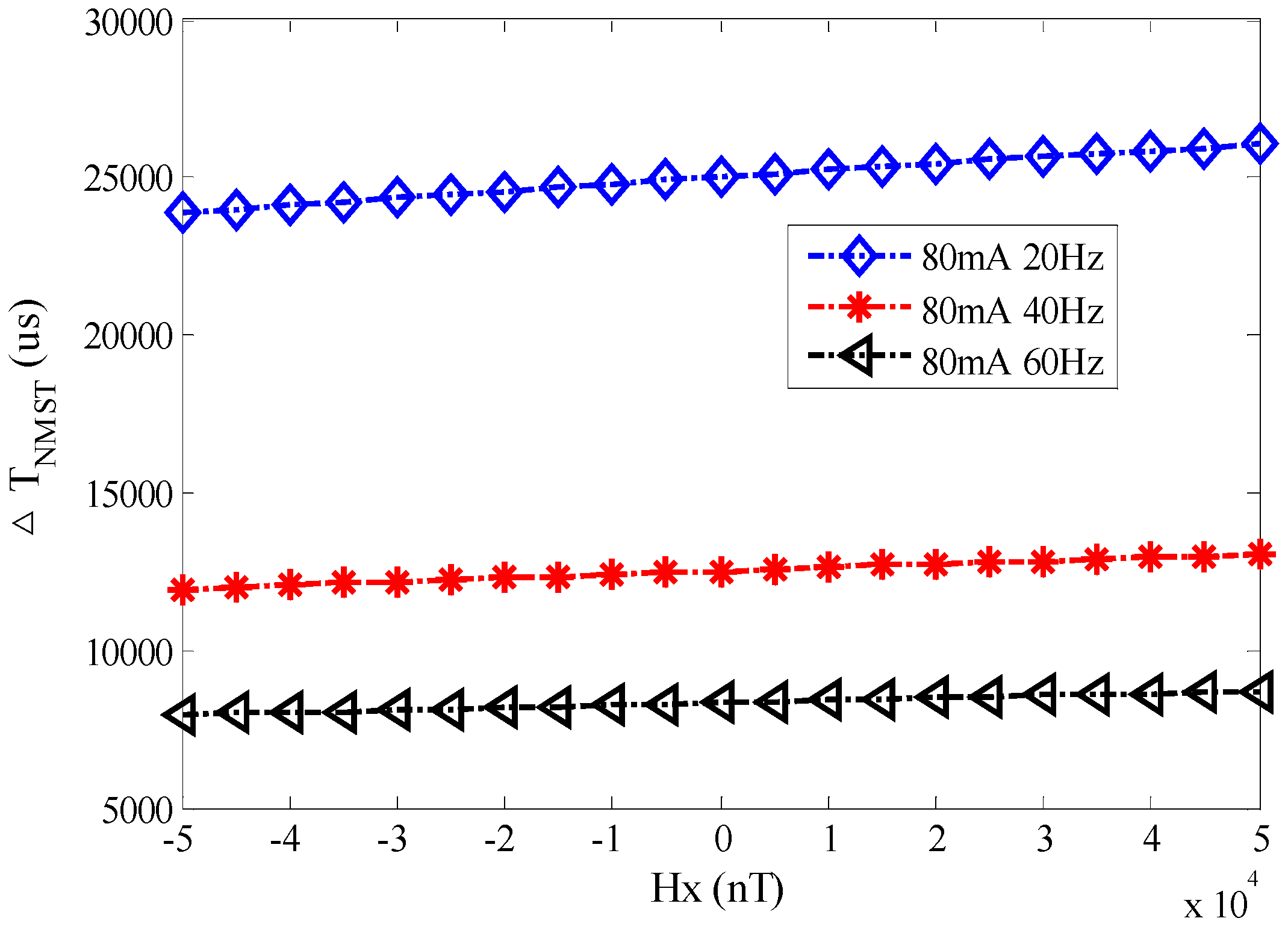
- When the excitation current is 80 mA, the excitation frequency changes from 20 Hz to 60 Hz with a 20 Hz interval. Hx is the same as mentioned above. Figure 12 shows the output time difference ΔTNMST of the RTD-fluxgate which is actually measured with different excitation frequencies.
- a
- Every n ΔTNMST forms an array Ni, and then the mean and variance σi of each array need calculating in turn.
- b
- The amount of effective data after processing is more than 3/4 times of the amount of data before processing. When |ΔTNMST(i−1)n+j − | > kσi, ΔTNMST(i−1)n+j is considered as gross error, therefore, the value is replaced by the mean of the array; when |ΔTNMST(i−1)n+j − | < kσi, this value is reserved. A new time difference array N’ = N’1 + N’2 + … N’i is formed.
- c
- At the initial point of the new data sequence N’, 50 consecutive data points are processed with equal weight endpoints at a time through the equation , k = 1, 2, 3, …, n × I − l + 1. In this paper, the sequence N’ is processed twice.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Andò, B.; Baglio, S.; Bulsara, A.R.; Trigona, C. Design and characterization of a microwire fluxgate magnetometer. Sens. Actuators A Phys. 2009, 151, 145–153. [Google Scholar] [CrossRef]
- David, C.; Marina, D.-M.; Lucas, P.; Claudio, A. Small fluxgate magnetometers: Development and future trends in Spain. Sensors 2010, 10, 1859–1870. [Google Scholar]
- Paperno, E.; Weiss, E.; Plotkin, A. Tube-core orthogonal fluxgate operated in fundamental mode. IEEE Trans. Magn. 2008, 44, 4018–4021. [Google Scholar] [CrossRef]
- Lu, C.C.; Huang, J.; Chiu, P.K.; Chiu, S.L.; Jeng, J.T. High-sensitivity low-noise miniature fluxgate magnetometers using a flip chip conceptual design. Sensors 2014, 14, 13815–13829. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.Z.; Li, J.J.; Chen, S.Y.; Shi, H.Y. Sensitivity Enhancement for coupled core fluxgate magnetometer utilizing negative state feedback. In Proceedings of the 2016 Tenth International Conference on Sensing Technology, Nanjing, China, 11–13 November 2016; pp. 1–5. [Google Scholar]
- Andò, B.; Baglio, S.; Bulsara, A.R.; Sacco, V. RTD Fluxgate: A Low-Power nonlinear device to sense weak magnetic fields. IEEE Instrum. Meas. Mag. 2005, 8, 64–73. [Google Scholar] [CrossRef]
- Bulsara, A.R.; Seberino, C.; Gammaitoni, L.; Karlsson, M.F.; Lundqvist, B.; Robinson, J.W.C. Signal detection via residence-time asymmetry in noisy bistable devices. Phys. Rev. E 2003, 67. [Google Scholar] [CrossRef] [PubMed]
- Andò, B.; Baglio, S.; Malfa, S.L.; Trigona, C.; Bulsara, A.R. Experimental investigations on the spatial resolution in RTD-fluxgates. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference, Singapore, 5–7 May 2009; pp. 1542–1545. [Google Scholar]
- Andò, B.; Baglioa, S.; Sacco, V.; Bulsara, A.R.; In, V. PCB fluxgate magnetometers with a residence times difference readout strategy: The Effects of Noise. IEEE Trans. Instrum. Meas. 2008, 57, 19–24. [Google Scholar] [CrossRef]
- Nikitin, A.; Stocks, N.G.; Bulsara, A.R. Bistable sensors based on broken symmetry phenomena: The residence time difference vs. the second harmonic method. Eur. Phys. J. Spec. Top. 2013, 222, 2583–2593. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Wu, S.J.; Zhou, Z.Z.; Cheng, D.F.; Pang, N.; Wang, Y.X. Research on the dynamic hysteresis loop model of the residence times difference (RTD)-fluxgate. Sensors 2013, 13, 11539–11552. [Google Scholar] [CrossRef] [PubMed]
- Andò, B.; Baglio, S.; Sacco, V.; Bulsara, A.; In, V. Noise effects in RTD fluxgate. IEEE Sens. J. 2005, 4, 935–938. [Google Scholar]
- Nikitin, A.; Stocks, N.G.; Bulsara, A.R. Signal detection via residence times statistics: Noise-mediated minimization of the measurement error. Phys. Rev. E 2003, 68. [Google Scholar] [CrossRef] [PubMed]
- Jiang, W.J.; Shi, Y.B.; Zhao, W.J.; Wang, X.X. Parameters identification of fluxgate magnetic core adopting the biogeography-based optimization algorithm. Sensors 2016, 16, 979–991. [Google Scholar] [CrossRef] [PubMed]
- Andò, B.; Baglio, S.; Bulsara, A.R.; Caruso, V.; In, V.; Sacco, V. Investigate the optimal geometry to minimize the demagnetizing effect in RTD-fluxgate. In Proceedings of the Instrumentation and Measurement Technology Conference, Sorrento, Italy, 24–27 April 2006; pp. 2175–2178. [Google Scholar]
- Andò, B.; Baglio, S.; Bulsara, A.R.; Sacco, V.; Savalli, N. Investigation on optimal materials selection in RTD-fluxgate design. In Proceedings of the IEEE Instrumentation and Measurement Technology Conference, Ottawa, ON, Canada, 16–19 May 2005; pp. 1261–1265. [Google Scholar]
- Lu, C.C.; Huang, J. A 3-axis miniature magnetic sensor based on a planar fluxgate magnetometer with an orthogonal fluxguide. Sensors 2015, 15, 14727–14744. [Google Scholar] [CrossRef] [PubMed]
- Andò, B.; Baglio, S.; Bulsara, A.R.; Sacco, V. “Residence times difference” fluxgate magnetometers. IEEE Sens. J. 2005, 5, 895–904. [Google Scholar] [CrossRef]
- Andò, B.; Ascia, A.; Baglio, S.; Bulsara, A.R.; In, V.; Pitrone, N.; Trigona, C. Residence times difference fluxgate magnetometer for magnetic biosensing. Am. Inst. Phys. 2008, 139. [Google Scholar] [CrossRef]
- Ubizskii, S.B.; Pavlyk, L.P. The pendulum-like fluxgate magnetic field sensor. Sens. Actuators A 2008, 141, 440–446. [Google Scholar] [CrossRef]
- Lo, C.H. Modeling the effects of nanosized precipitates on magnetic hysteresis and Barkhausen effect signal. J. Appl. Phys. 2012, 111. [Google Scholar] [CrossRef]
- Jiles, D.C. Frequency dependence of hysteresis curves in conducting magnetic materials. J. Appl. Phys. 1994, 10, 5849–5855. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Wu, S.J.; Lu, H.; Cheng, D.F.; Chen, C.; Pang, N.; Wan, Y.X.; Zhou, Z.J.; Chen, S.Y. Output performance optimization for RTD fluxgate sensor based on dynamic permeability. Sci. China Inf. Sci. 2016, 59, 112213–112226. [Google Scholar] [CrossRef]
- Sun, X.Y.; Liu, S.B.; Liu, S.W. A method for residence times difference fluxgate detection. Chin. J. Sens. Actuators 2013, 26, 1202–1205. [Google Scholar]
- Pang, N.; Cheng, D.F.; Wang, Y.Z.; Wu, S.J.; Qu, W.L. Research on sensitive unit Barkhausen noise processing of residence times difference fluxgate. Chin. J. Sci. Instrum. 2015, 36, 2594–2601. [Google Scholar]
- Jiang, C.D.; Lin, J.; Duan, Q.M.; Sun, S.Q.; Tian, B.F. Statistical stacking and adaptive notch filter to remove high-level electromagnetic noise from MRS measurements. Surf. Geophys. 2011, 9, 459–468. [Google Scholar] [CrossRef]
- Lu, H.; Cheng, D.F.; Wang, Y.Z.; Zhao, L.X. A Study on the stochastic resonance model of time-difference fluxgate system with feedback control. Acta Electron. Sin. 2012, 40, 1701–1704. [Google Scholar]
- Lu, H.; Cheng, D.F.; Zhan, L.X. The research on the residence times difference fluxgate model. In Proceedings of the International Conference on Electronics Communications and Control, Ningbo, China, 9–11 September 2011; pp. 4023–4027. [Google Scholar]
- Andò, B.; Baglio, S.; Sacco, V.; Bulsara, A.R. Effects of driving mode and optimal material selection on a residence times difference-based fluxgate magnetometer. IEEE Trans. Instrum. Meas. 2005, 54, 1366–1373. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time (s) | Fluctuations of ΔTNMST (μs) | Fluctuations of ΔT (μs) | Time (s) | Fluctuations of ΔTNMST (μs) | Fluctuations of ΔT (μs) |
|---|---|---|---|---|---|
| 36.1 | 0.884 | 0.719 | 37.6 | 0.882 | −0.158 |
| 36.2 | −0.755 | −1.221 | 37.7 | 1.215 | 0.219 |
| 36.3 | 0.913 | 0.180 | 37.8 | 0.283 | 3.219 |
| 36.4 | 2.364 | −1.642 | 37.9 | 0.784 | 0.678 |
| 36.5 | 0.136 | −2.061 | 38.0 | 1.251 | 0.459 |
| 36.6 | 1.765 | −1.275 | 38.1 | 0.403 | −1.949 |
| 36.7 | 1.443 | −0.239 | 38.2 | 0.672 | −0.648 |
| 36.8 | −0.992 | −0.334 | 38.3 | −2.198 | 0.197 |
| 36.9 | 0.748 | 1.552 | 38.4 | −1.016 | −1.426 |
| 37.0 | −0.095 | −0.367 | 38.5 | 1.474 | −0.968 |
| 37.1 | 0.334 | 2.292 | 38.6 | −0.228 | −2.057 |
| 37.2 | −0.455 | 0.788 | 38.7 | 1.563 | −3.038 |
| 37.3 | −1.107 | 0.199 | 38.8 | 0.486 | −1.587 |
| 37.4 | 0.895 | −1.476 | 38.9 | 1.040 | −1.955 |
| 37.5 | 0.483 | 0.177 | 39.0 | 0.335 | −3.651 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, N.; Cheng, D.; Wang, Y. A High Stability Time Difference Readout Technique of RTD-Fluxgate Sensors. Sensors 2017, 17, 2325. https://doi.org/10.3390/s17102325
Pang N, Cheng D, Wang Y. A High Stability Time Difference Readout Technique of RTD-Fluxgate Sensors. Sensors. 2017; 17(10):2325. https://doi.org/10.3390/s17102325
Chicago/Turabian StylePang, Na, Defu Cheng, and Yanzhang Wang. 2017. "A High Stability Time Difference Readout Technique of RTD-Fluxgate Sensors" Sensors 17, no. 10: 2325. https://doi.org/10.3390/s17102325
APA StylePang, N., Cheng, D., & Wang, Y. (2017). A High Stability Time Difference Readout Technique of RTD-Fluxgate Sensors. Sensors, 17(10), 2325. https://doi.org/10.3390/s17102325