
Application of Fault Tree Analysis and Fuzzy Neural Networks to Fault Diagnosis in the Internet of Things (IoT) for Aquaculture



Abstract
:1. Introduction
2. Materials and Methods
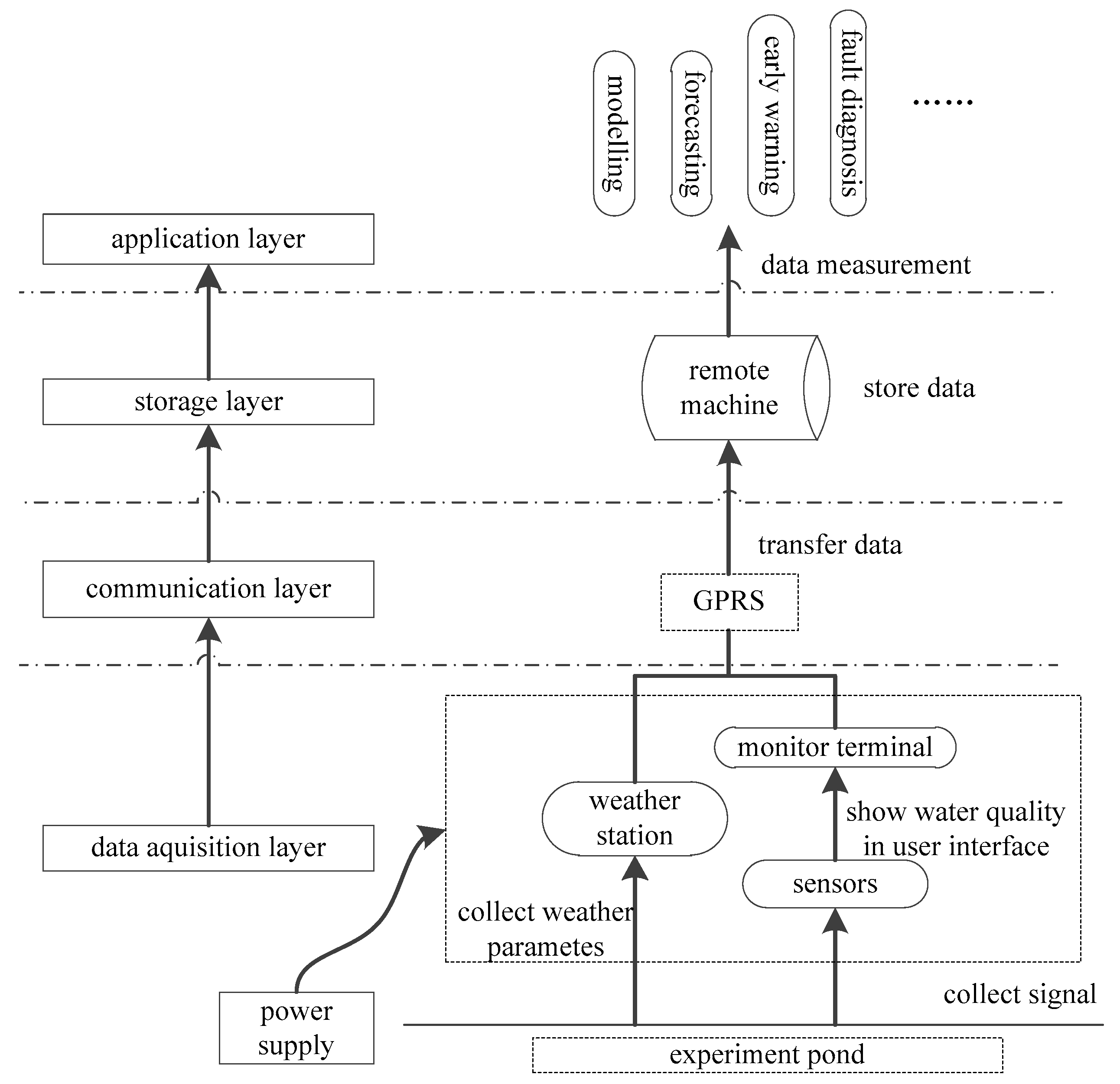
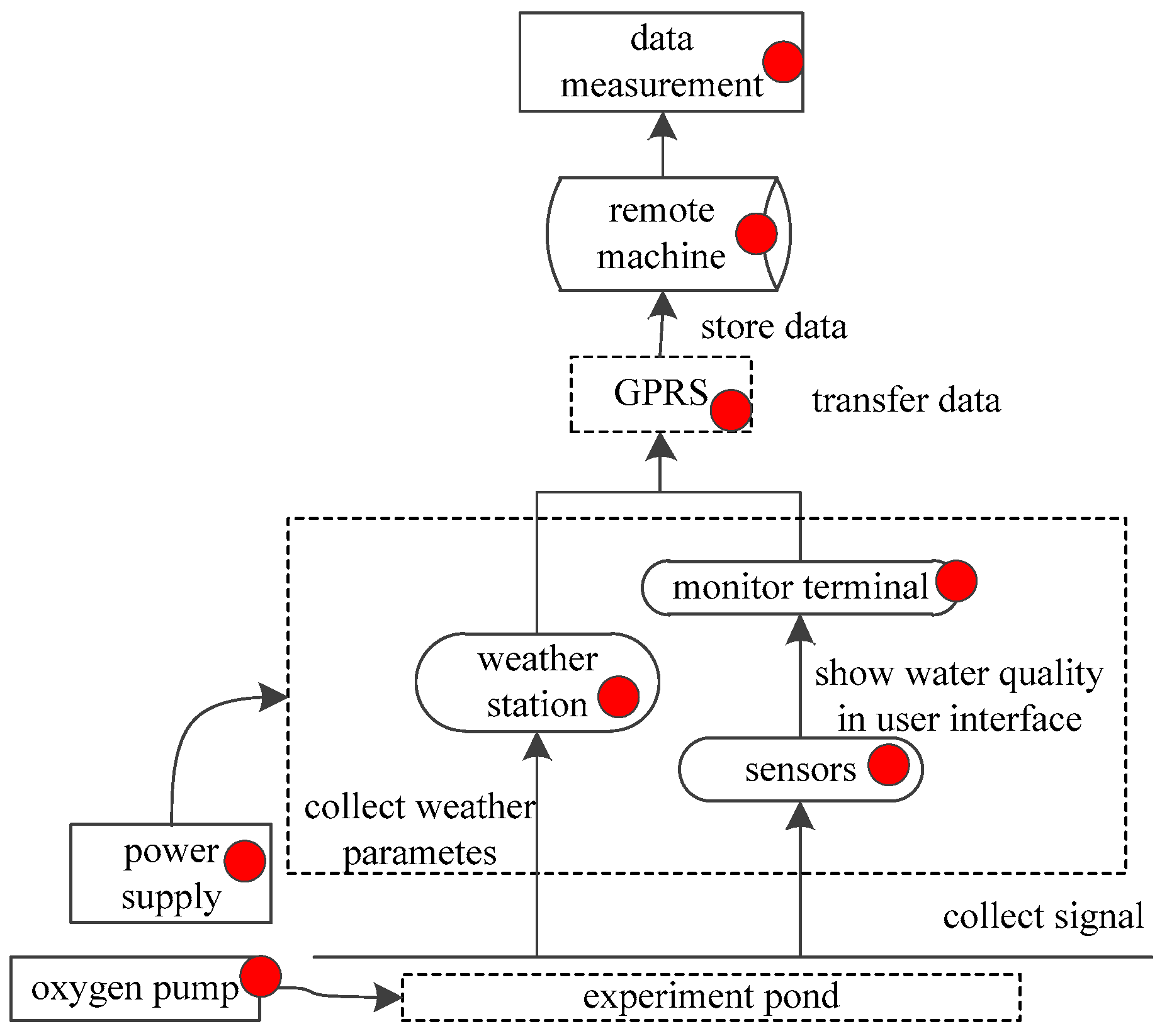
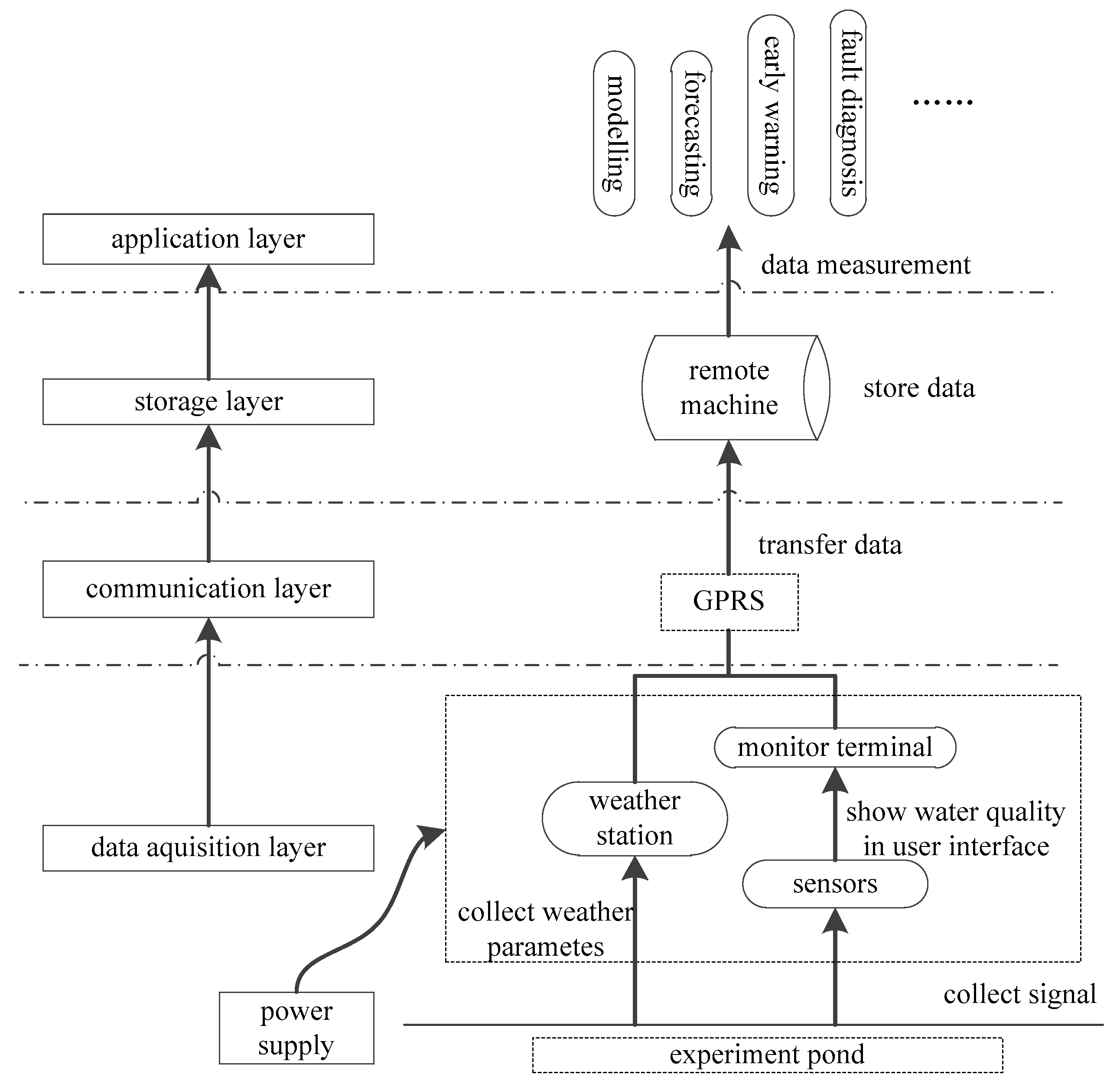
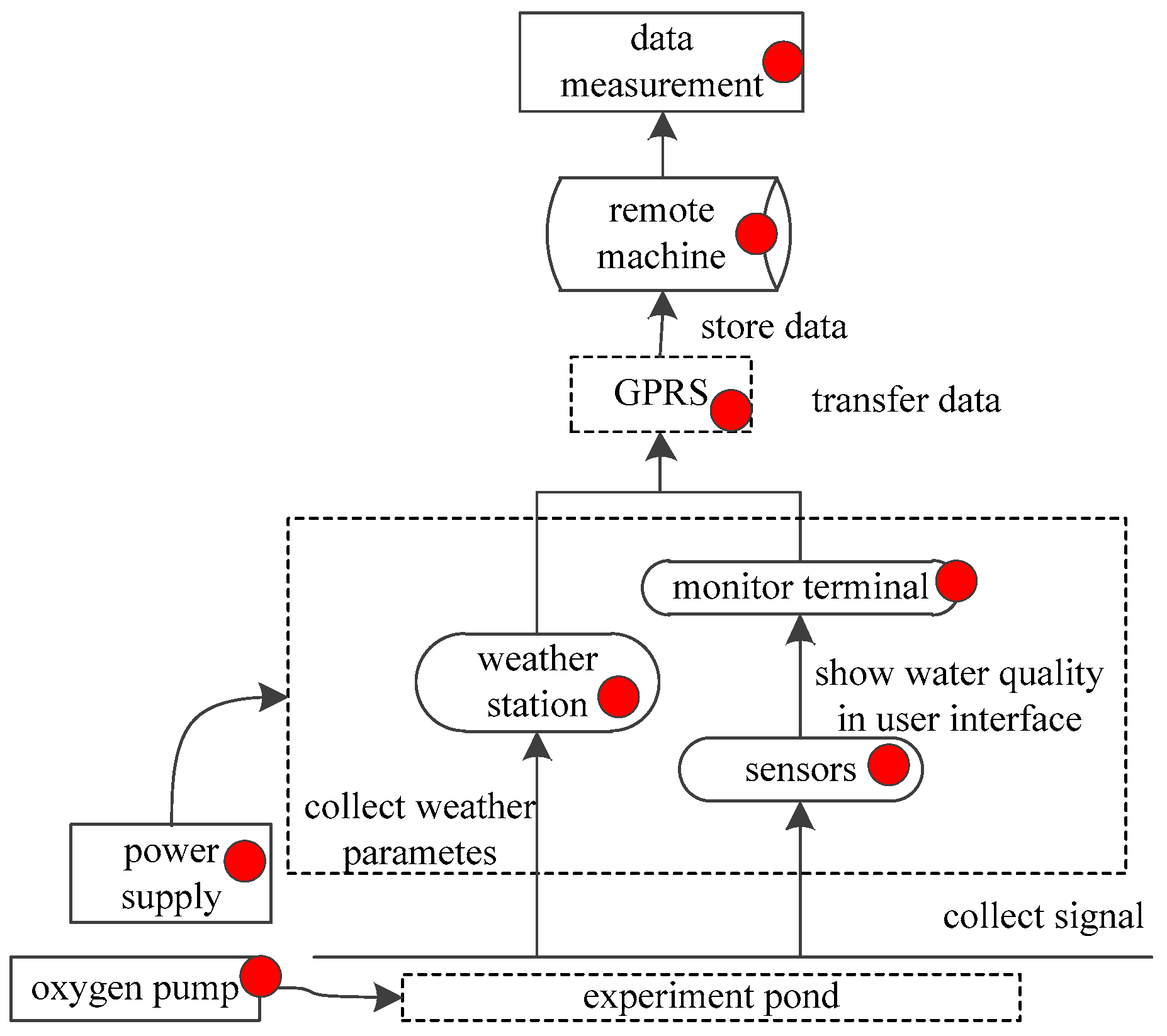
2.1. The Aquaculture IoT
2.2. Fault Definition in the Aquaculture IoT
- (a)
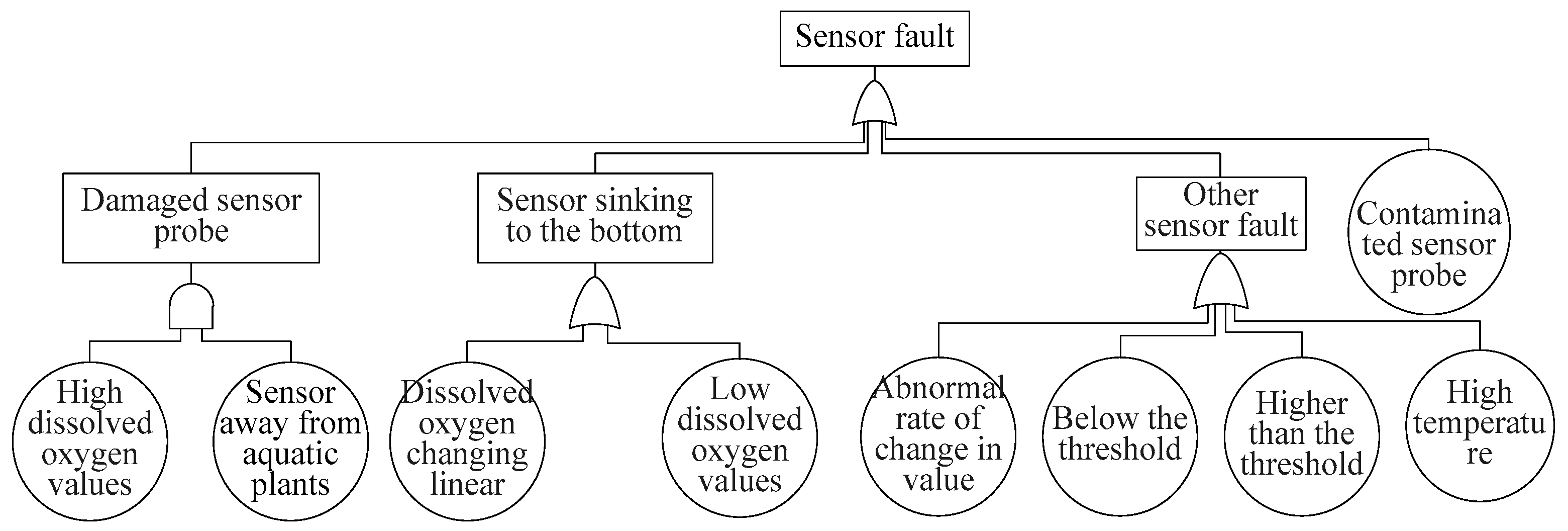
- The sensor faults include damaged sensor probes, sensors sinking to the bottom of the ponds, contaminated sensor probes and other sensor faults. The symptoms include high dissolved oxygen values, sensors far away from aquatic plants, dissolved oxygen values changing linearly, low dissolved oxygen values, high temperatures, abnormal rates of change in values, values below the normal threshold and higher than threshold values.
- (b)
- The collector fault symptoms include zero readings, non-“-” reading distortion and abnormal rates of change in values.
- (c)
- The power supply faults include battery failures, mains failures and photovoltaic panel faults. The symptoms include devices going offline and unstable voltages.
- (d)
- The communication faults occur when data transmission is interrupted by landforms because of the narrow bandwidth of the transmission channels. The symptoms include low energy network signals, high energy network signals, weak communication signals, missing data and strong communication signals.
- (e)
- The software faults include software errors and embedded program errors in embedded operating systems or application software, respectively. The software fault symptoms include “-” readings, unchanged data and collectors refusing to transfer logger data.
- (f)
- Environmental interferences might affect the normal operation of the IoT, because the equipment is placed outdoors. The symptoms include missing data, zero readings and reading distortion not being “-”.
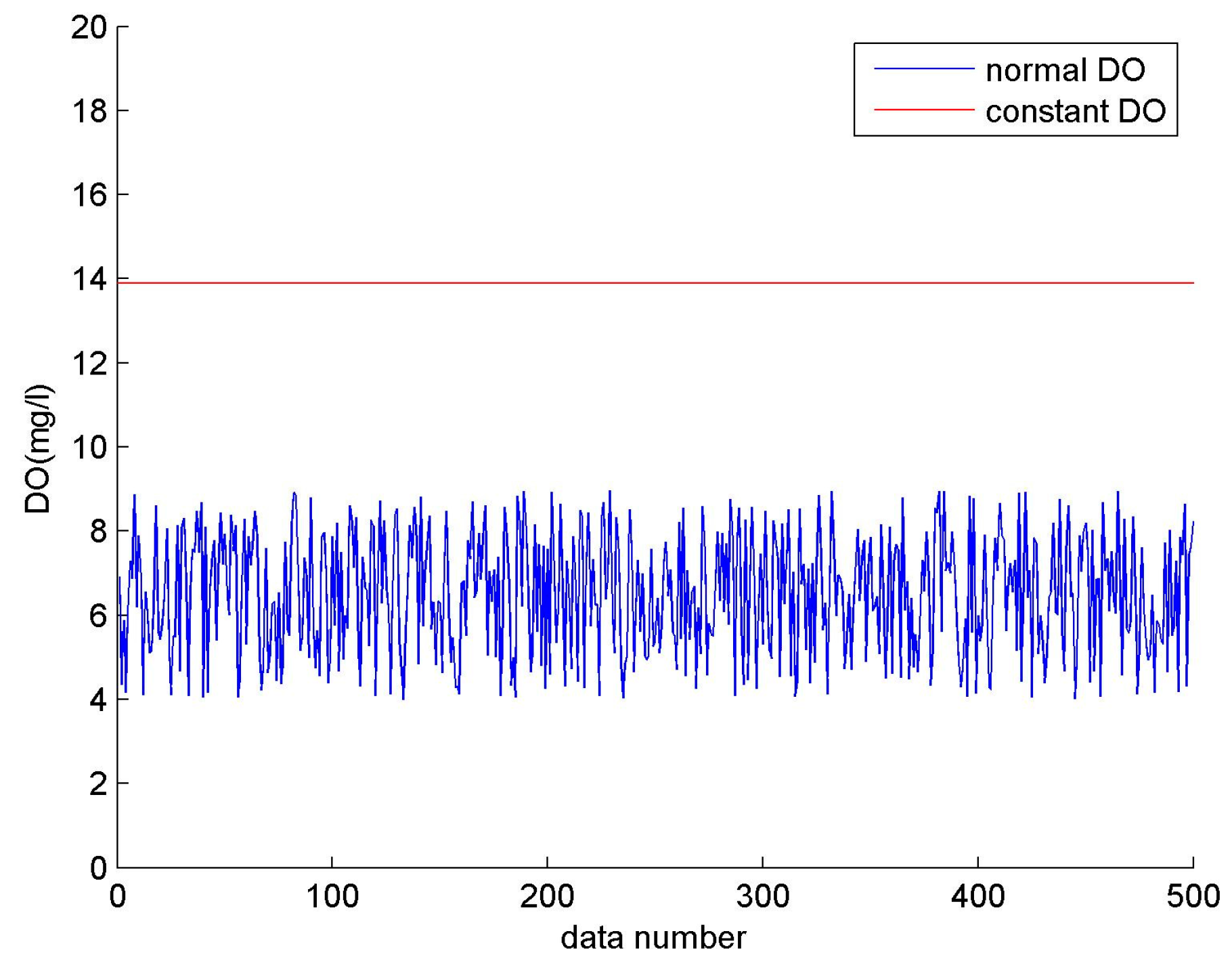
- Constant output. Output is a constant value, and expressed by the following equation:where C is a constant value.
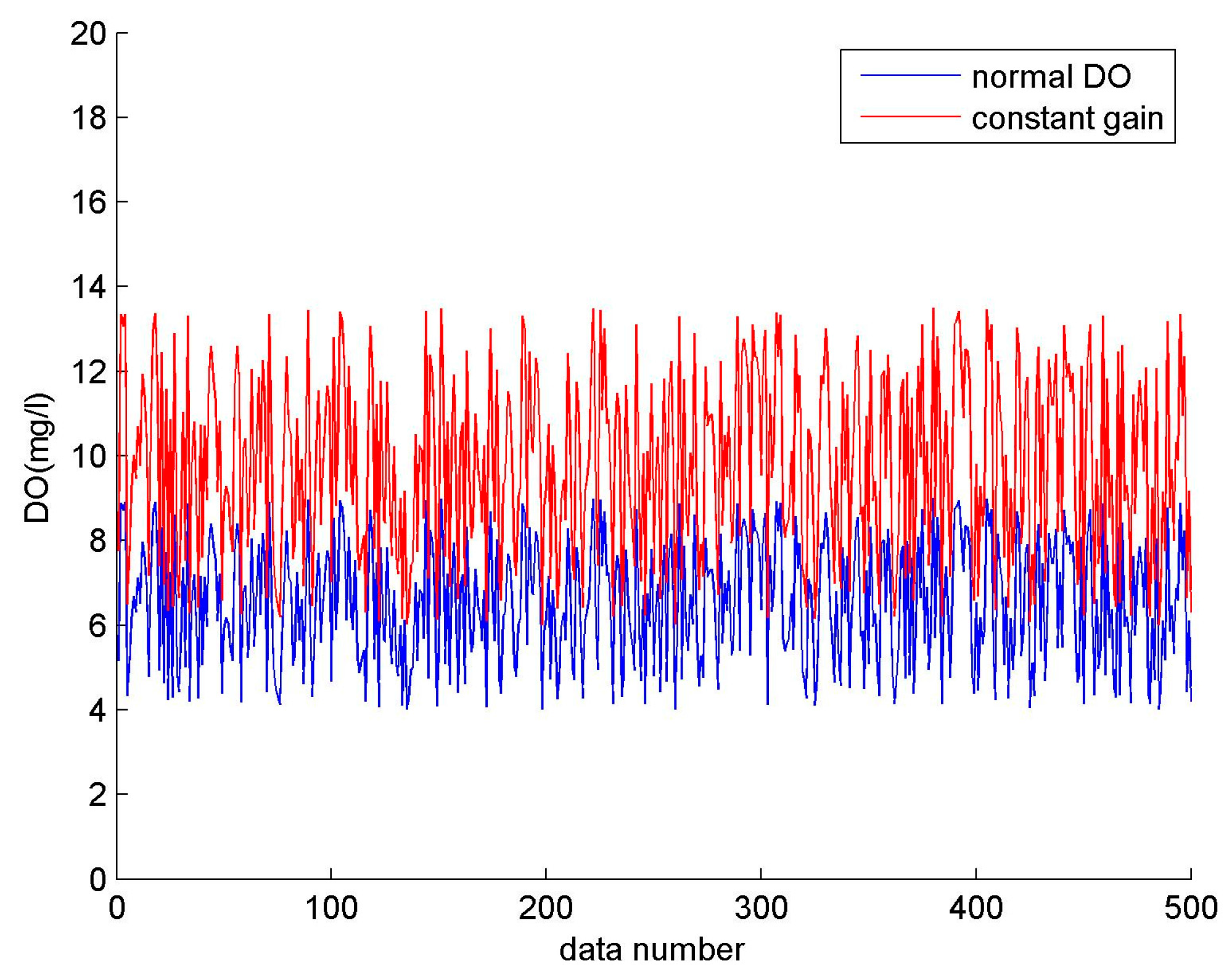
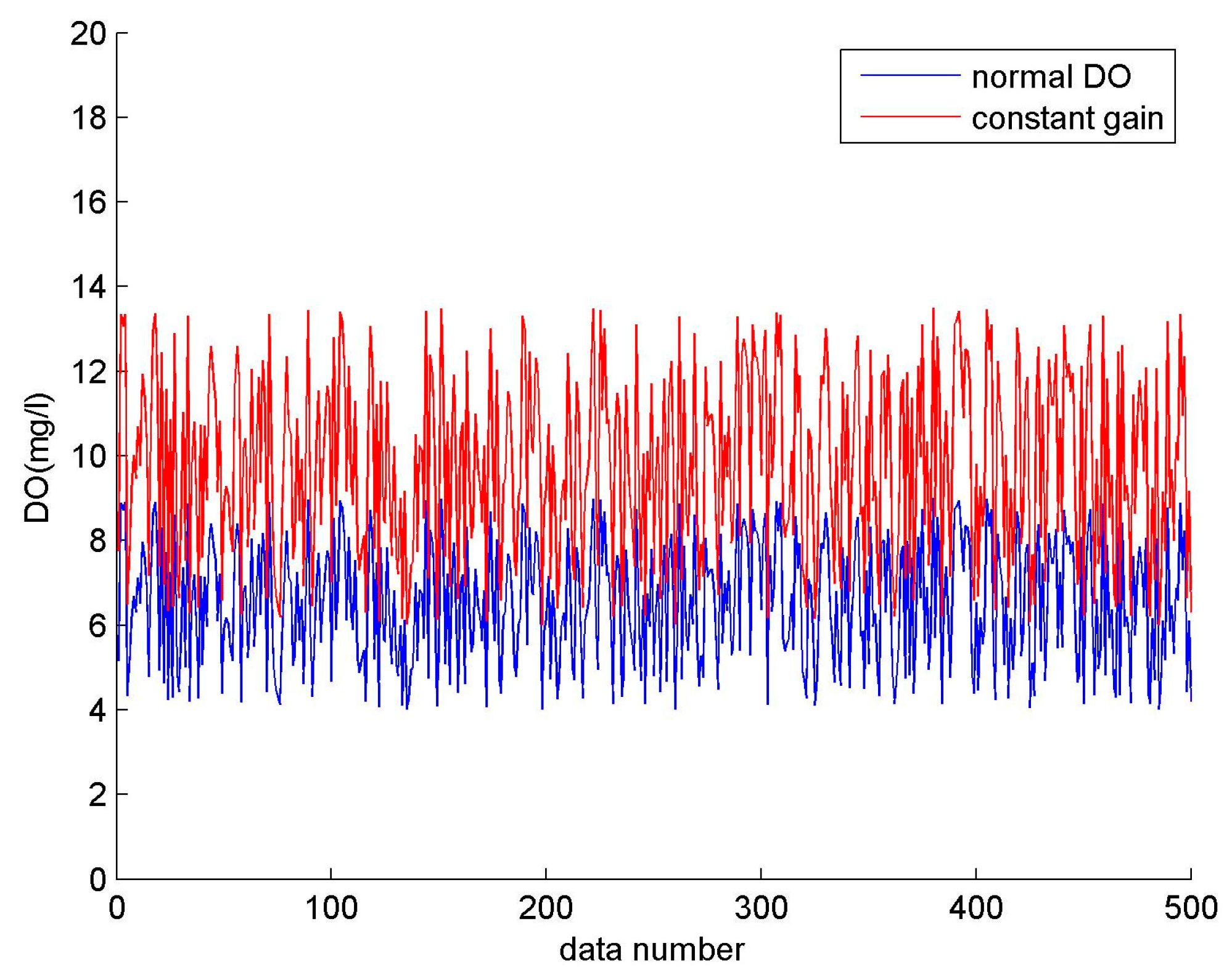
- Constant gain. Constant gain occurs when the data maintains an unchanged multiple of the normal data, expressed by the following equation:where k denotes the gain coefficient.
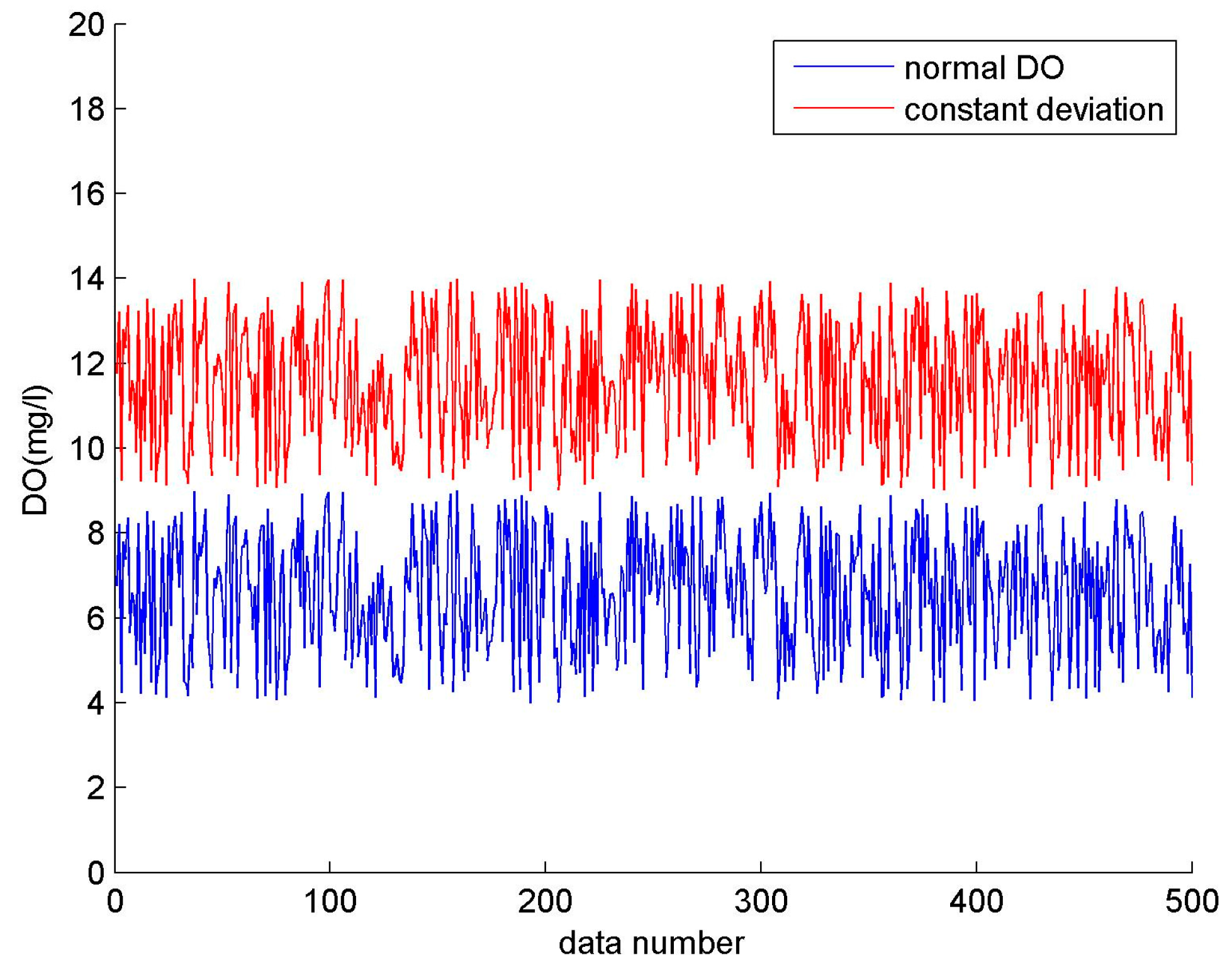
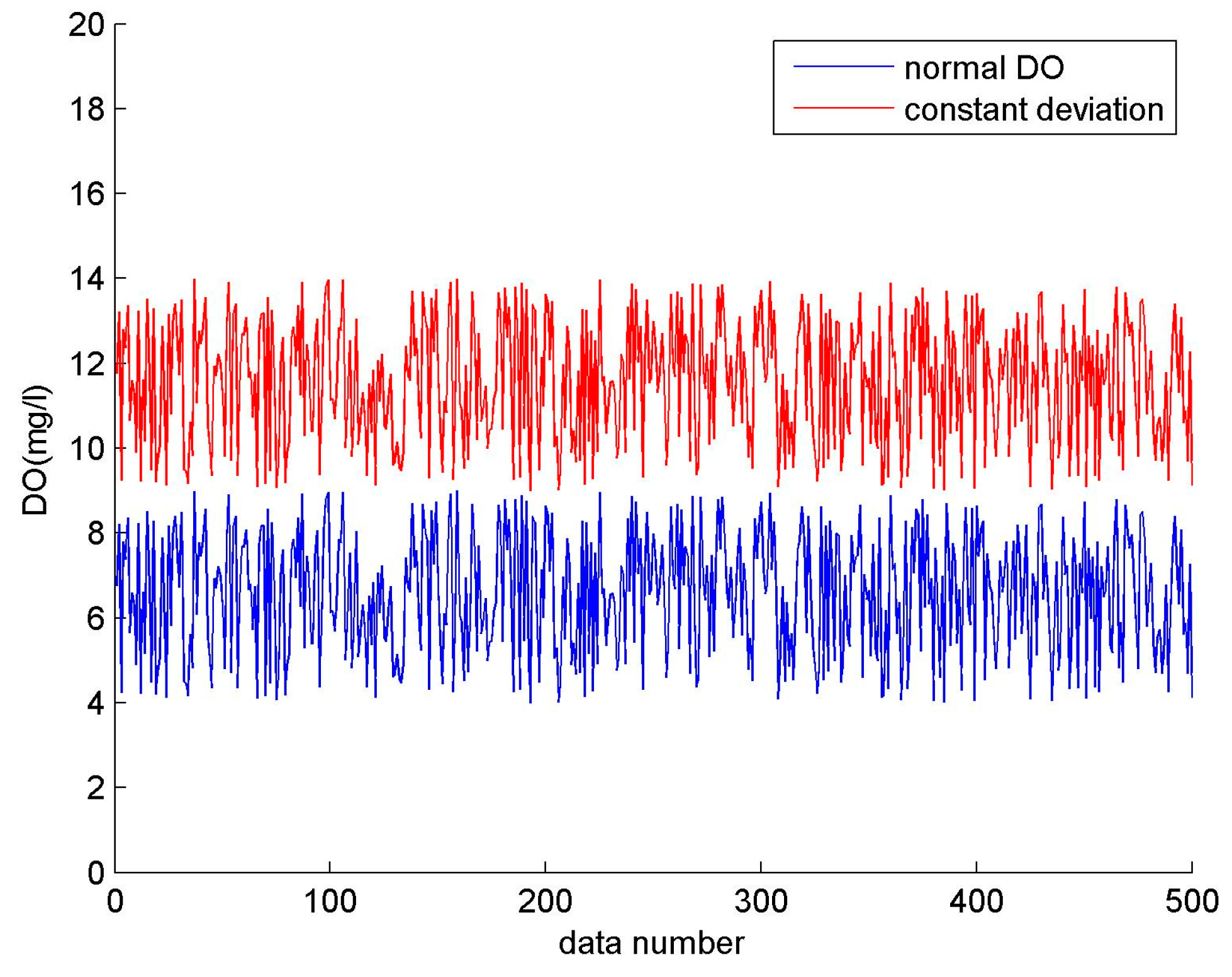
- Constant deviation. The collected data shows a constant bias when the sensor generates a slow drift for a long time. This fault can be expressed by the equation:where ΔS denotes the deviation value. As shown in Figure 5, the fault data represented by the red line and the sample data represented by the blue line differ by a constant, where ΔS = 5.
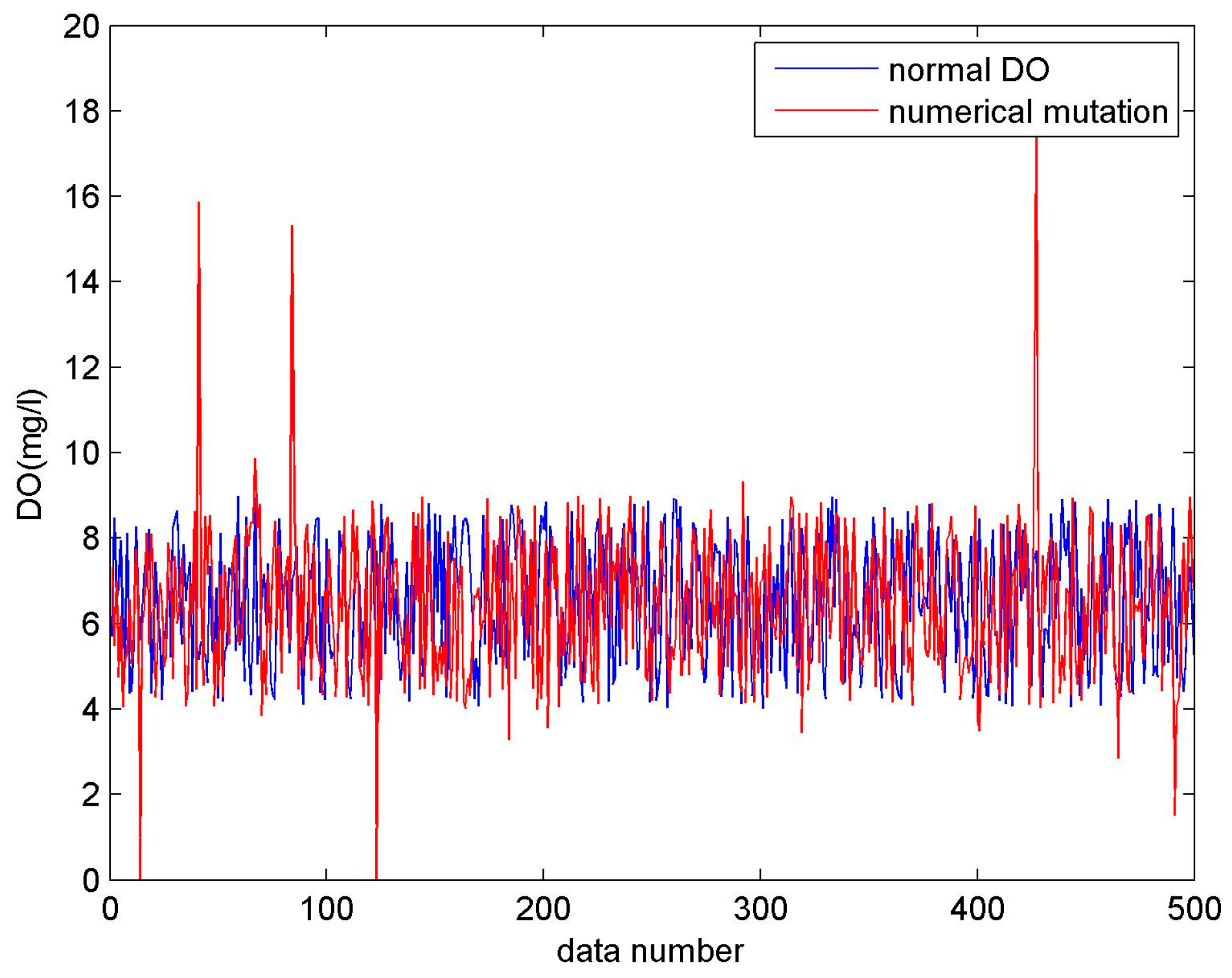
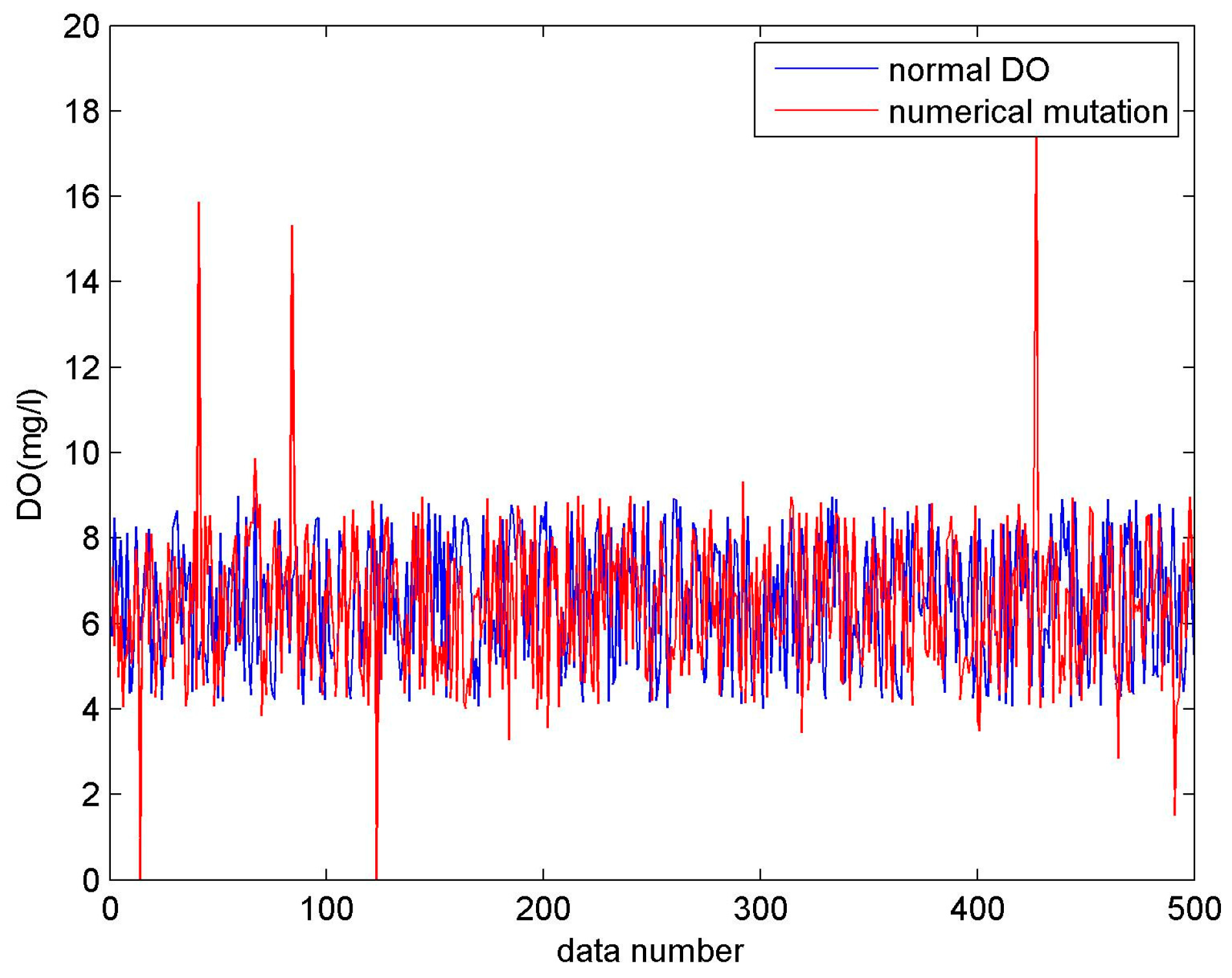
- Numerical mutation. The acquired value becomes overrun or is much less than normal. The fault can be expressed by the following equation:where denotes the mutation value and is a random function representing the time a numerical mutation occurs. In Figure 6, the fault sample represented by the red line is randomly generated, and there is no law at all.
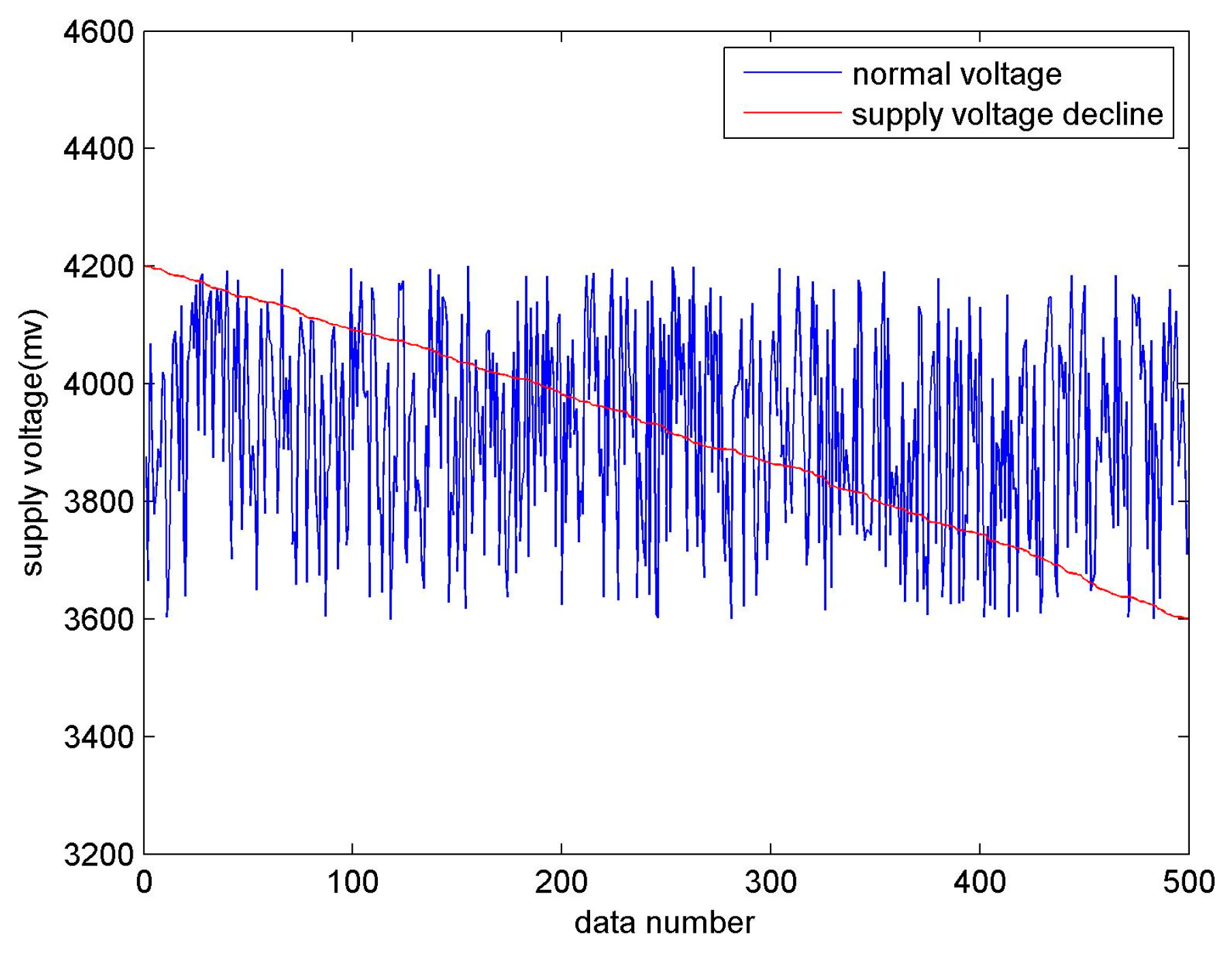
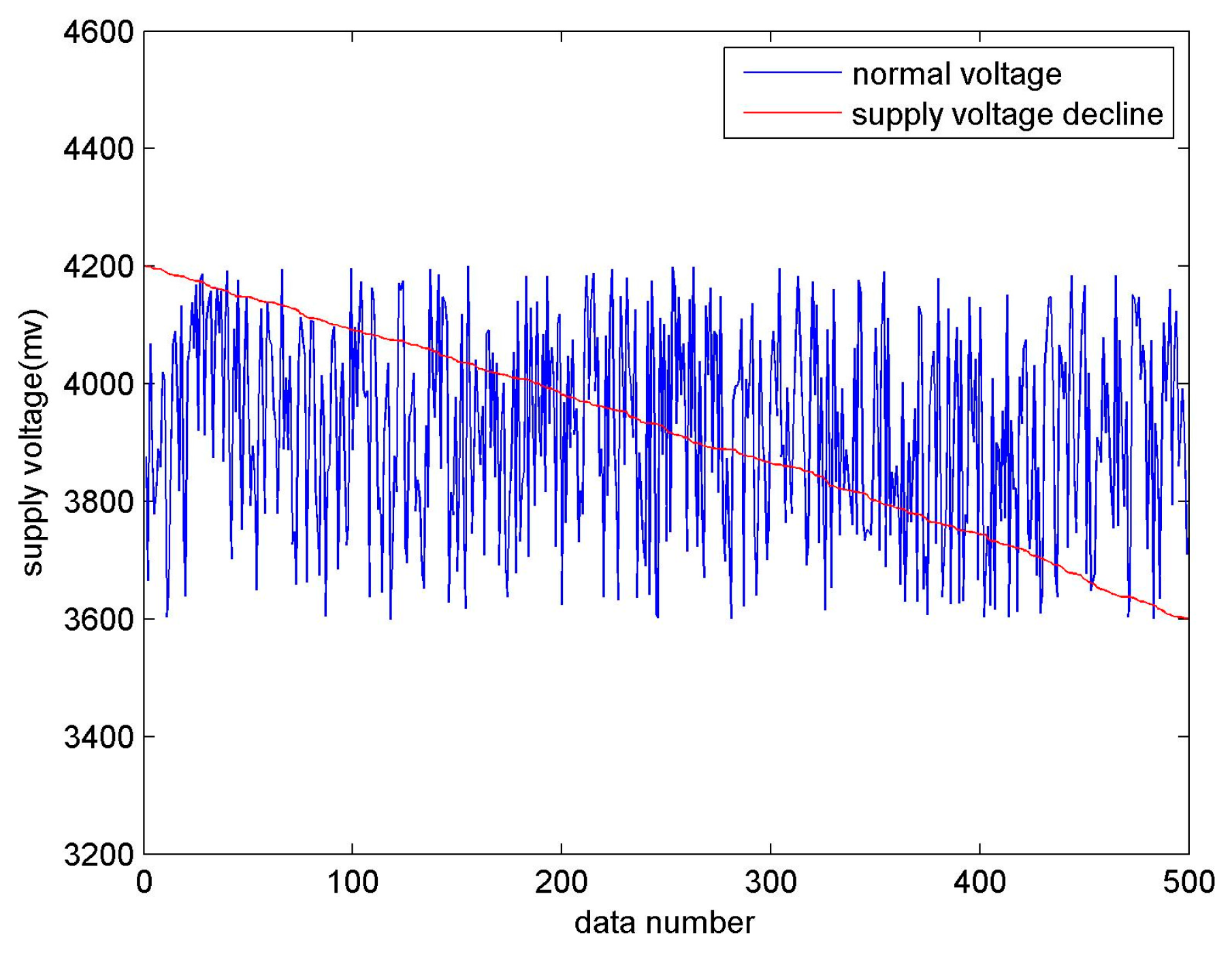
- Supply voltage fault. A remarkable feature of power failures is that the supply voltage continues to decline, even down to 3600 mV. As shown in Figure 7, the voltage fault data represented by the red line continues to decrease to 3600 mV, and even less.
- Missing data. Missing data is caused by a collector refusing to transfer data or software errors.
3. Results
3.1. Fault Diagnosis in the Aquaculture IoT
3.1.1. Fault Tree Analysis
- Step 1:
- Fault-tree establishment begins with the statement of a most undesired event-fault as the top event;
- Step 2:
- Input events need to be found, from which can be referred to higher output events;
- Step 3:
- Repeat step 2 until the bottom events (basic events) are obtained;
- Step 4:
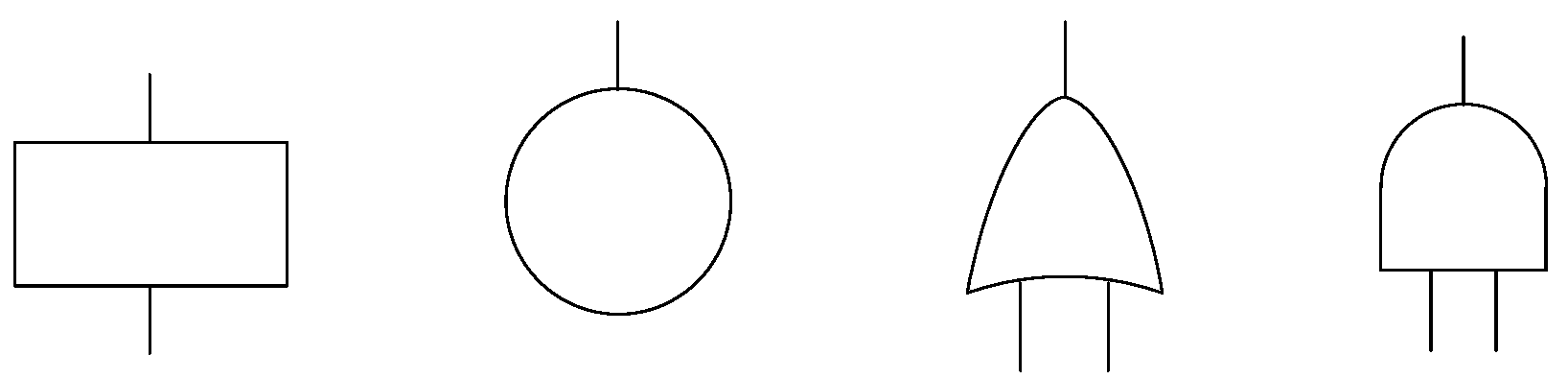
- Connect all levels events with appropriate logical symbols to form the fault tree.
3.1.2. Fuzzy Neural Network
3.2. Application of Fault Diagnosis Method to the Aquaculture IoT
3.2.1. Fault Diagnosis Using Fault Tree Analysis
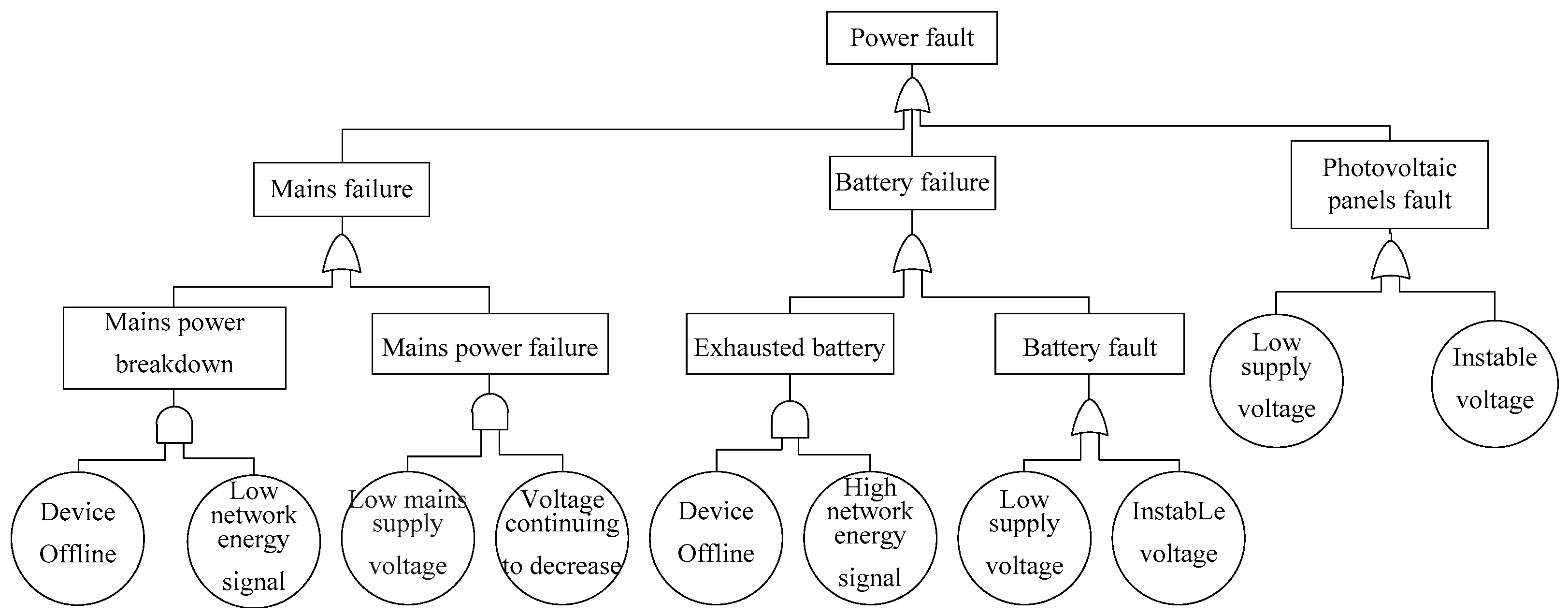
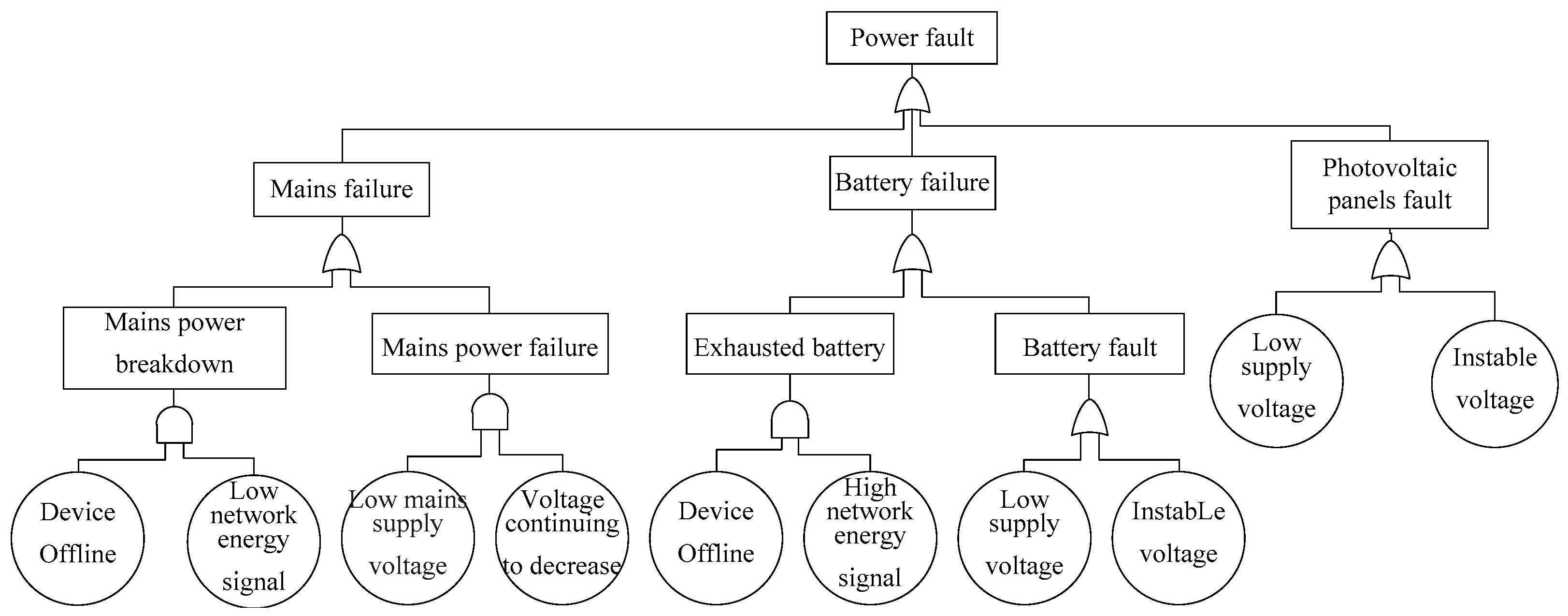
- Main failures can be inferred from main power breakdowns or mains power failures in the main failure subtree. Main power breakdowns can be inferred from the basic symptom device offline and low network energy. Main power failures can be inferred from the basic symptoms low mains supply voltage and voltage continuing to decrease.
- Battery failures can be inferred from exhausted batteries or battery faults in the battery failure subtree. Exhausted batteries can be inferred from the basic symptoms device offline and high network energy signals. Battery faults can be inferred from the basic symptom low supply voltage or voltage instability.
- Photovoltaic panel faults can be inferred from the basic symptoms low supply voltage or instable voltage in the photovoltaic panels fault subtree.
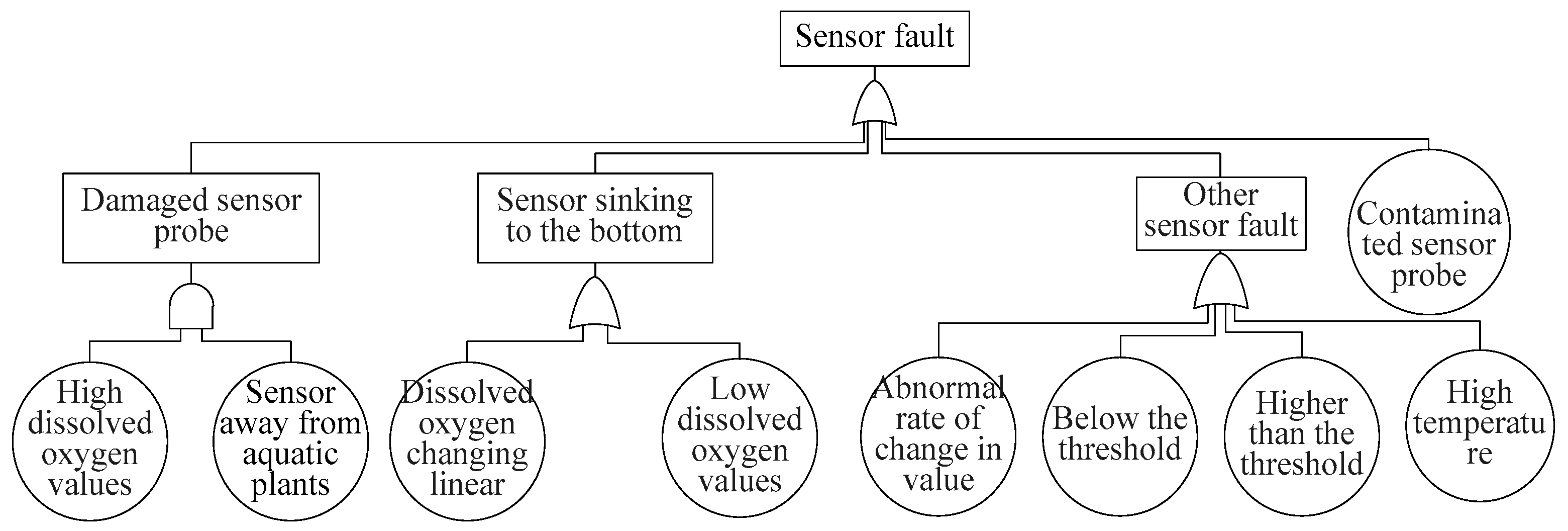
- Damaged sensor probes can be inferred from the basic symptoms high dissolved oxygen values and sensor away from aquatic plants.
- Sensor sinking to the bottom can be inferred from the basic symptom dissolved oxygen value changing linearly or low dissolved oxygen values.
- Other sensor fault symptoms can be inferred from the basic symptoms abnormal rate of change in value, below the threshold, higher than the threshold or high temperature.
- Other communication faults can be inferred from the basic symptoms device offline, high network energy signals and weak communicational signal.
- SIM card failures can be inferred from the basic symptoms device offline, high network energy signals and strong communicational signal.
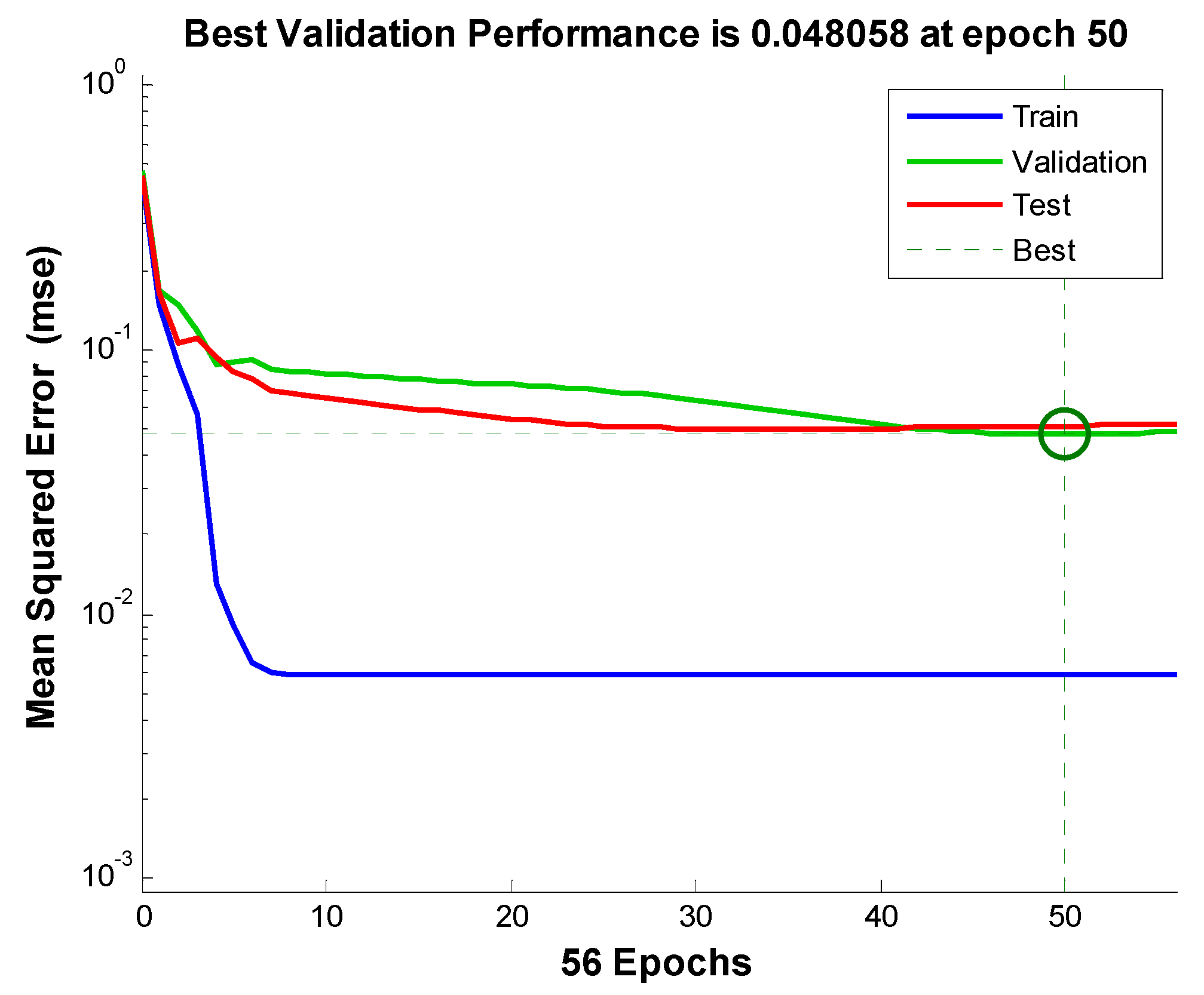
3.2.2. Fault Diagnosis by Fuzzy Neural Network
- If X1 = 0.9 and X14 = 1, then Y6 = 1.
- If X15 = 1, then Y7 = 1.
- If X5 = 1 and X3 = 0.9 and X4 = 0.8, then Y10 = 1.
- If X18 =1, then Y11 =1.
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, F.; Wei, Y.; Chen, Y.; Li, D.; Zhang, X. An Intelligent Optical Dissolved Oxygen Measurement Method Based on a Fluorescent Quenching Mechanism. Sensors 2015, 15, 30913–30926. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Li, Z.; Fang, J.; Yue, J.; Li, D. Automatic video tracking of Chinese mitten crabs based on the particle filter algorithm using a biologically constrained probe and resampling. Comput. Electron. Agric. 2014, 106, 111–119. [Google Scholar] [CrossRef]
- Yu, H.; Chen, Y.; Hassan, S.; Li, D. Dissolved oxygen content prediction in crab culture using a hybrid intelligent method. Sci. Rep. 2016, 6, 27292. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Hua, J.; Wang, Y.B. Application effect of aquaculture IOT system. Appl. Mech. Mater. 2013, 303, 1395–1401. [Google Scholar] [CrossRef]
- Xu, X.; Chen, T.; Minami, M. Intelligent fault prediction system based on internet of things. Comput. Math. Appl. 2012, 64, 833–839. [Google Scholar] [CrossRef]
- Refaat, S.S.; Abu-Rub, H.; Saad, M.S.; Aboul-Zahab, E.M.; Iqbal, A. ANN-based for detection, diagnosis the bearing fault for three phase induction motors using current signal. In Proceedings of the IEEE 2013 International Conference on Industrial Technology, Cape Town, South Africa, 25–28 February 2013; IEEE: Piscataway, NJ, USA; pp. 253–258.
- Mehra, R.K.; Peschon, J. An innovations approach to fault detection and diagnosis in dynamic systems. Automatica 1971, 7, 637–640. [Google Scholar] [CrossRef]
- Pamuk, N.; Uyaroglu, Y. An expert system for power transformer fault diagnosis using advanced generalized stochastic petri net. Przeglad Elektrotech. 2012, 88, 350–353. [Google Scholar]
- Chen, Y.; Hsu, C.Y.; Liu, L.; Yang, S. Constructing a nutrition diagnosis expert system. Exp. Syst. Appl. 2012, 39, 2132–2156. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Q.; Chang, M.; Chen, H.; Zang, G. Research on fault diagnosis expert system based on the neural network and the fault tree technology. Procedia Eng. 2012, 31, 1206–1210. [Google Scholar] [CrossRef]
- Subathra, B.; Radhakrishnan, T.K. Recurrent neuro fuzzy and fuzzy neural hybrid networks: A review. Instrum. Sci. Technol. 2012, 40, 29–50. [Google Scholar] [CrossRef]
- Ma, D.; Liang, Y.; Zhao, X.; Guan, R.; Shi, X. Multi-BP expert system for fault diagnosis of powersystem. Eng. Appl. Artif. Intell. 2013, 26, 937–944. [Google Scholar] [CrossRef]
- Zhang, J.; Morris, J. Process modeling and fault diagnosis using fuzzy neural networks. Fuzzy Set Syst. 1996, 79, 127–140. [Google Scholar] [CrossRef]
- Zhang, S.; Asakura, T.; Xu, X.L.; Xu, B.J. Fault diagnosis system for rotary machine based on fuzzy neural networks. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kobe, Japan, 20–24 July 2003; IEEE: Piscataway, NJ, USA; pp. 199–204.
- Zhang, J.; Morris, A.J. On-line process fault diagnosis using fuzzy neural networks. Intell. Syst. Eng. 1994, 3, 37–47. [Google Scholar] [CrossRef]
- Watanabe, K.; Hirota, S. Incipient diagnosis of multiple faults in chemical processes via hierarchical artificial neural network. In Proceedings of the International Conference on Industrial Electronics, Control and Instrumentation, Kobe, Japan, 28 October–1 November 1991; IEEE: Piscataway, NJ, USA; pp. 1500–1505.
- Li, R.Q.; Chen, J.; Wu, X. Fault diagnosis of rotating machinery using knowledge-based fuzzy neural network. Appl. Math. Mech. 2006, 27, 99–108. [Google Scholar] [CrossRef]
- Isermann, R. Fault-Diagnosis Systems: An Introduction from Fault Detection to Fault Tolerance; Springer: New York, NY, USA, 2006. [Google Scholar]
- Chen, G.; Yan, P.; Yi, R.; Liu, F. Fault diagnosis method based on system-phenomenon-fault tree. Chin. J. Mech. Eng. 2011, 24, 466–473. [Google Scholar] [CrossRef]
- Mentes, A.; Helvacioglu, I.H. An application of fuzzy fault tree analysis for spread mooring systems. Ocean Eng. 2011, 38, 285–294. [Google Scholar] [CrossRef]
- Jong, C.G.; Leu, S.S. Bayesian-network-based hydro-power fault diagnosis system development by fault tree transformation. J. Mar. Sci. Techol. 2013, 21, 367–379. [Google Scholar]
- Yue, Y.; Li, X.; Zong, Q. Development of Automobile Fault Diagnosis Expert System Based on Fault Tree—Neural Network Ensamble. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2008; pp. 2028–2031.
- Lee, W.S.; Grosh, D.L.; Tillman, F.A.; Lie, C.H. Fault Tree Analysis, Methods, and Applications—A Review. IEEE Trans. Reliab. 1985, 34, 194–203. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Module | Faults | Fault Symptoms | Maintenance Suggestions |
|---|---|---|---|
| Sensor | Sensor probe is damaged; Sensor sink to the bottom; Sensor probe contamination; Other | High dissolved oxygen values | Clean the probe; fix sensor in an appropriate position; Replace the probe; Replace sensor |
| Sensor away from aquatic plants | |||
| Dissolved oxygen numerical linear | |||
| Low dissolved oxygen values | |||
| High temperature | |||
| Abnormal rate of change in value | |||
| Below the threshold | |||
| Higher than the threshold value | |||
| Collector | Collector fault | Read zero | System reboot; Replace collector |
| Reading distortion not “-” | |||
| Abnormal rate of change in value | |||
| Power module | Low battery; Battery failure; mains failure; photovoltaic panels fault; | Device Offline Voltage instability | Restore electricity; enable additional power supply; battery replacement |
| Communication module | Ambient noise; communications line failure; SIM card failure | Low supply voltage | Exclude environmental interference factors; replace the SIM card; Maintenance communications line |
| low mains voltage | |||
| Low network energy signals | |||
| High network energy signals | |||
| Weak communication signal | |||
| Data missing | |||
| Strong communication signal | |||
| Software | Software Error; Embedded program error | Reading “-” | System reboot; Software debug |
| Data unchanged | |||
| Refuse to transfer data logger | |||
| Environmental interference | Environmental interference | Data missing | Eliminate interference source |
| reading zero | |||
| Reading distortion not“-” |
| Input | Fault Symptom | Input | Fault Symptom |
|---|---|---|---|
| X1 | Dissolved oxygen | X12 | Solar power voltage |
| X2 | Water temperature | X13 | First derivative of solar power voltage |
| X3 | Network energy signal | X14 | Sensor is near the aquatic plants |
| X4 | Communication signal | X15 | DO linearly |
| X5 | Equipment offline | X16 | First derivative of water quality |
| X6 | Mains voltage first derivative | X17 | Water quality overload |
| X7 | Read “-” | X18 | Data missing |
| X8 | Main voltage | X19 | Reading 0 |
| X9 | RMS of mains voltage | X20 | Reading distortion non “-“ |
| X10 | Battery voltage | X21 | Collector refused to transfer data |
| X11 | First derivative of battery voltage | X22 | Data unchanged |
| Inputs | Fault Symptoms | Decrease | Steady | Increase |
|---|---|---|---|---|
| X1 | DO | 0.1 | 0.5 | 0.9 |
| X2 | Water temperature | 0.2 | 0.5 | 0.8 |
| X3 | Communication signal intensity | 0.2 | 0.5 | 0.8 |
| X4 | Network energy signal | 0.1 | 0.5 | 0.9 |
| X8 | Main voltage | 0.1 | 0.5 | 0.9 |
| X9 | Supply voltage | 0.1 | 0.5 | 0.9 |
| X10 | Battery voltage | 0.1 | 0.5 | 0.9 |
| X12 | Solar power voltage | 0.1 | 0.5 | 0.9 |
| X16 | First derivative of water quality | 0.1 | 0.5 | 0.9 |
| X17 | Water quality overload | 0.2 | 0.5 | 0.8 |
| Output | Fault | Output | Fault |
|---|---|---|---|
| Y1 | Mains power breakdown | Y8 | Other sensor fault |
| Y2 | Mains power failure | Y9 | Communication fault |
| Y3 | Battery exhausted | Y10 | SIM card fault |
| Y4 | Battery failure | Y11 | Environmental interference |
| Y5 | Photovoltaic panels fault | Y12 | Software fault |
| Y6 | Sensor probe damage | Y13 | Collector fault |
| Y7 | Sensor sink to the bottom |
| Y1 | Y2 | Y3 | Y4 | Y5 | Y6 | Y7 | Y8 | Y9 | Y10 | Y11 | Y12 | Y13 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Actual | 1 | 3.96 × 10−8 | 1.25 × 10−7 | 8.96 × 10−8 | 7.05 × 10−15 | 1.05 × 10−7 | 1.04 × 10−7 | 8.11 × 10−8 | 1.32 × 10−7 | 7.69 × 10−8 | 9.53 × 10−8 | 2.05 × 10−10 | 2.05 × 10−10 |
| Ideal | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Y1 | Y2 | Y3 | Y4 | Y5 | Y6 | Y7 | Y8 | Y9 | Y10 | Y11 | Y12 | Y13 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Actual | 2.49 × 10−6 | 3.00 × 10−15 | 3.25 × 10−4 | 1.29 × 10−9 | 1.78 × 10−12 | 1.22 × 10−15 | 1.80 × 10−10 | 8.62 × 10−1 | 0 | 6.62 × 10−7 | 5.55 × 10−17 | 4.33 × 10−8 | 4.33 × 10−8 |
| Ideal | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 |
| Y1 | Y2 | Y3 | Y4 | Y5 | Y6 | Y7 | Y8 | Y9 | Y10 | Y11 | Y12 | Y13 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Actual | 5.66 × 10−13 | 1.34 × 10−10 | 2.83 × 10−7 | 4.16 × 10−8 | 3.58 × 10−8 | 2.19 × 10−7 | 1.32 × 10−7 | 1.25 × 10−7 | 3.21 × 10−8 | 1.31 × 10−11 | 4.72 × 10−9 | 1 | 6.99 × 10−11 |
| Ideal | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| Y1 | Y2 | Y3 | Y4 | Y5 | Y6 | Y7 | Y8 | Y9 | Y10 | Y11 | Y12 | Y13 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Actual | 1.70 × 10−9 | 7.59 × 10−10 | 2.75 × 10−8 | 2.38 × 10−14 | 3.21 × 10−11 | 6.31 × 10−8 | 3.07 × 10−8 | 3.97 × 10−8 | 3.03 × 10−7 | 1.05 × 10−9 | 3.74 × 10−1 | 2.13 × 10−8 | 3.18 × 10−1 |
| Ideal | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zhen, Z.; Yu, H.; Xu, J. Application of Fault Tree Analysis and Fuzzy Neural Networks to Fault Diagnosis in the Internet of Things (IoT) for Aquaculture. Sensors 2017, 17, 153. https://doi.org/10.3390/s17010153
Chen Y, Zhen Z, Yu H, Xu J. Application of Fault Tree Analysis and Fuzzy Neural Networks to Fault Diagnosis in the Internet of Things (IoT) for Aquaculture. Sensors. 2017; 17(1):153. https://doi.org/10.3390/s17010153
Chicago/Turabian StyleChen, Yingyi, Zhumi Zhen, Huihui Yu, and Jing Xu. 2017. "Application of Fault Tree Analysis and Fuzzy Neural Networks to Fault Diagnosis in the Internet of Things (IoT) for Aquaculture" Sensors 17, no. 1: 153. https://doi.org/10.3390/s17010153
APA StyleChen, Y., Zhen, Z., Yu, H., & Xu, J. (2017). Application of Fault Tree Analysis and Fuzzy Neural Networks to Fault Diagnosis in the Internet of Things (IoT) for Aquaculture. Sensors, 17(1), 153. https://doi.org/10.3390/s17010153