
Detection, Location and Grasping Objects Using a Stereo Sensor on UAV in Outdoor Environments


Abstract
:1. Introduction
2. Related Work
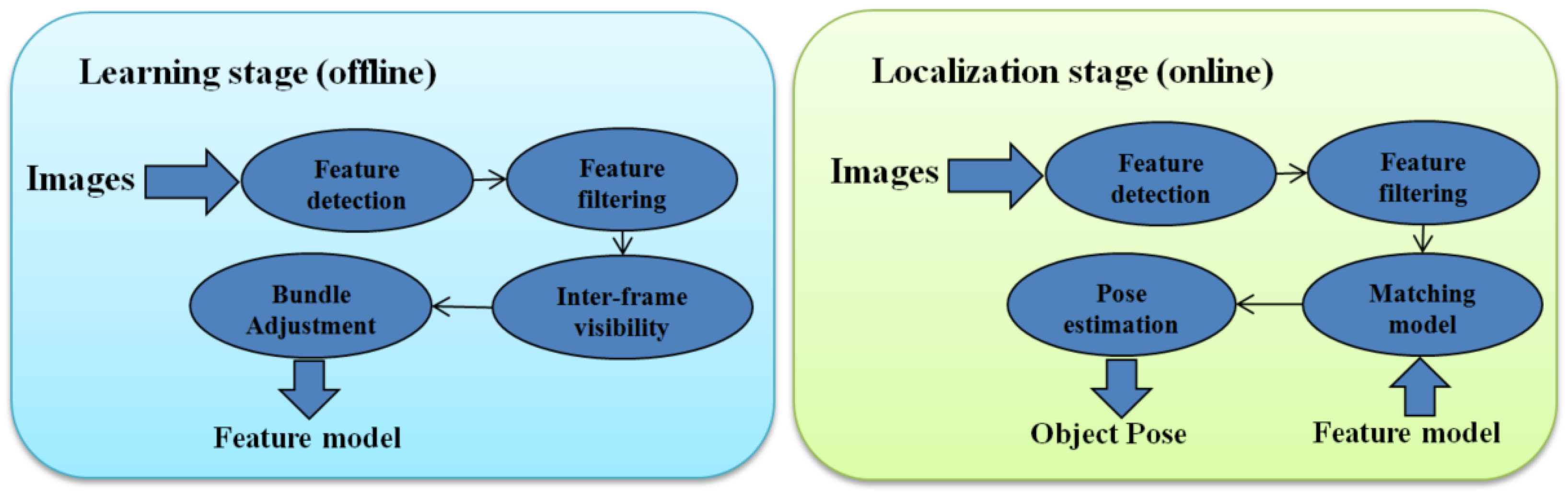
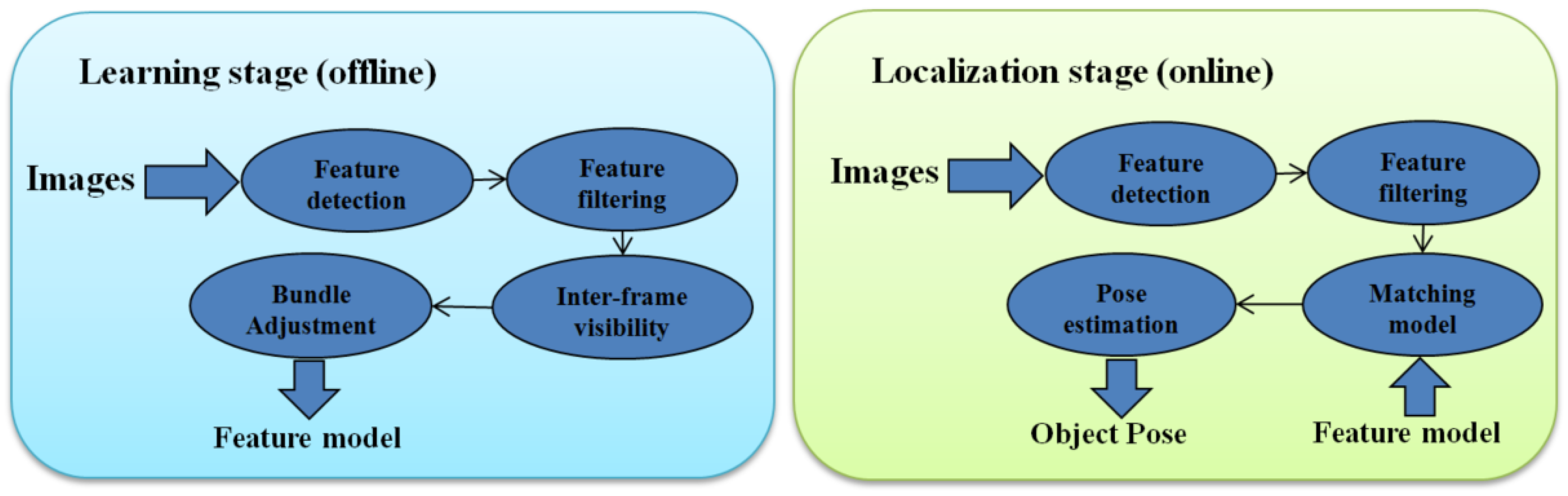
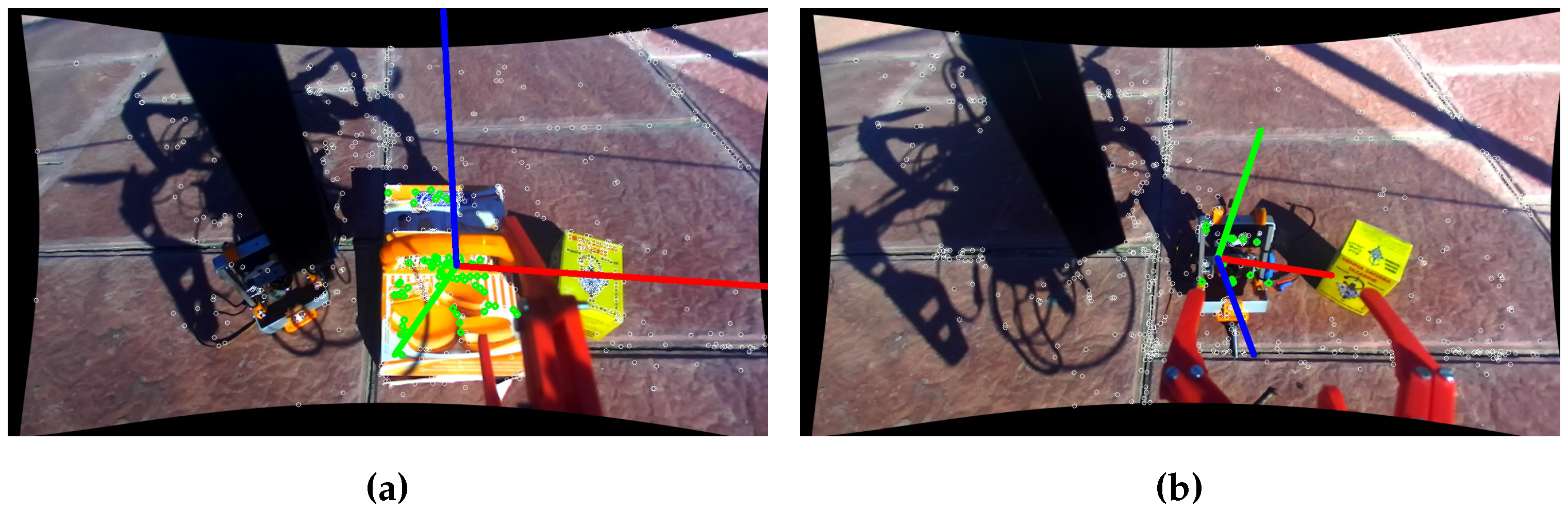
3. Object Detection and Pose Estimation
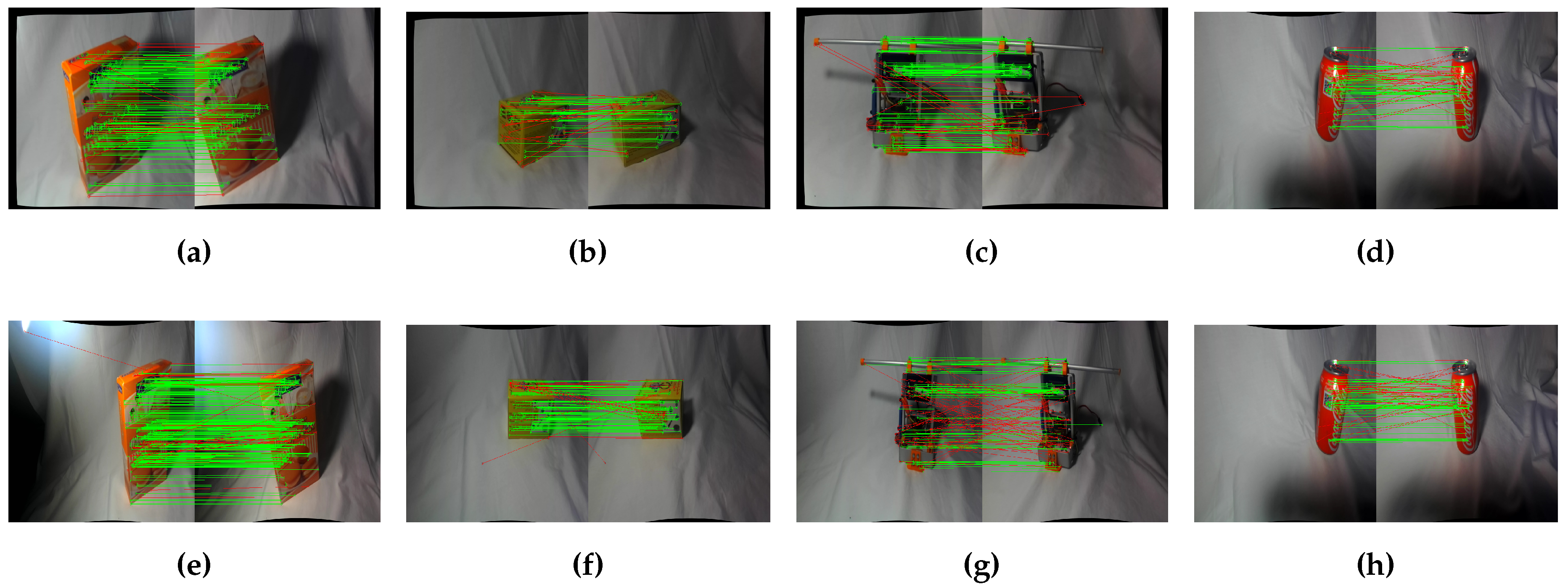
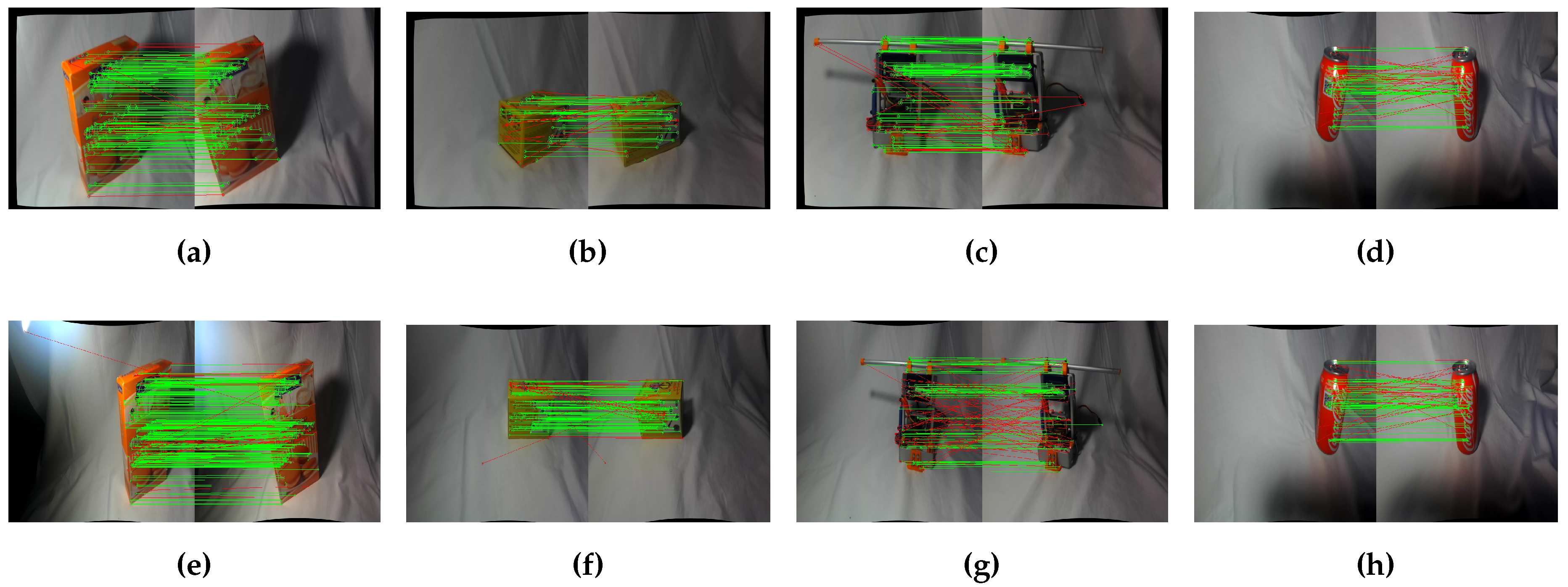
3.1. Feature Extraction and Filtering Using Stereo Cameras
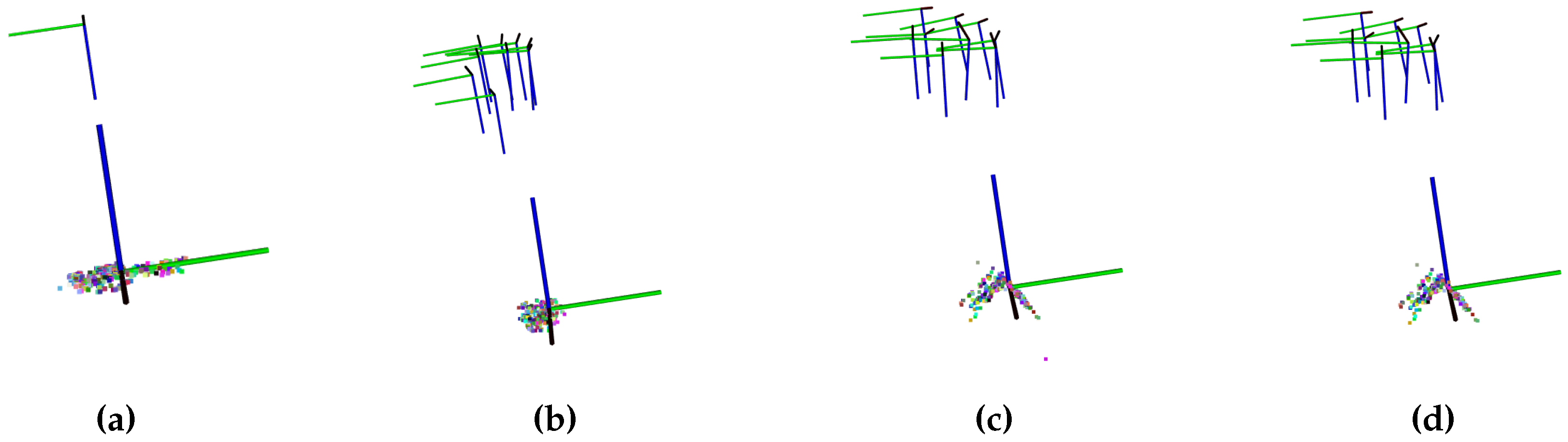
3.2. Object Modeling
- Image rectification from camera calibration.
- Detection of features on both images and matching them. Use of stereo geometry and RANSAC (Random sample consensus) to filter outliers.
- Matching of sequentially filtered features.
- Performance of bundle adjustment to create a 3D model of the object and store the corresponding descriptors.
- Scale model of the object to its real size using stereo information.
| Algorithm 1 Correlate back matches |
|
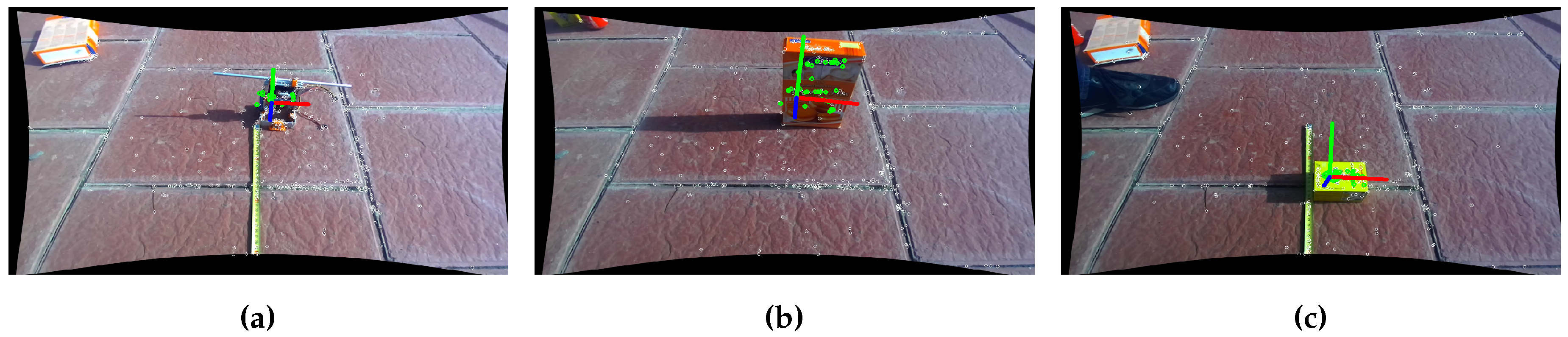
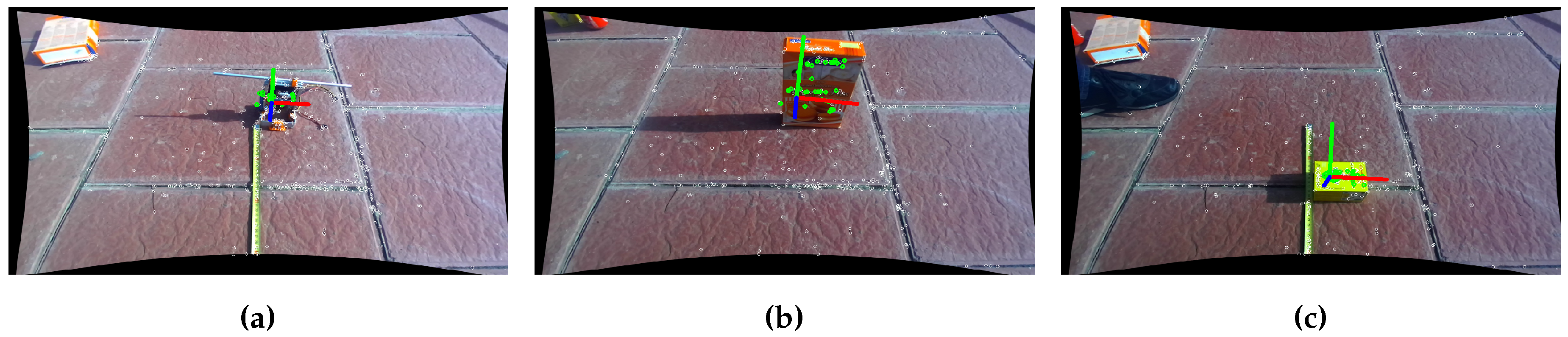
3.3. Finding Object in a Scene
| Algorithm 2 Online stage for finding learned objects. |
|
4. Experimental Validation
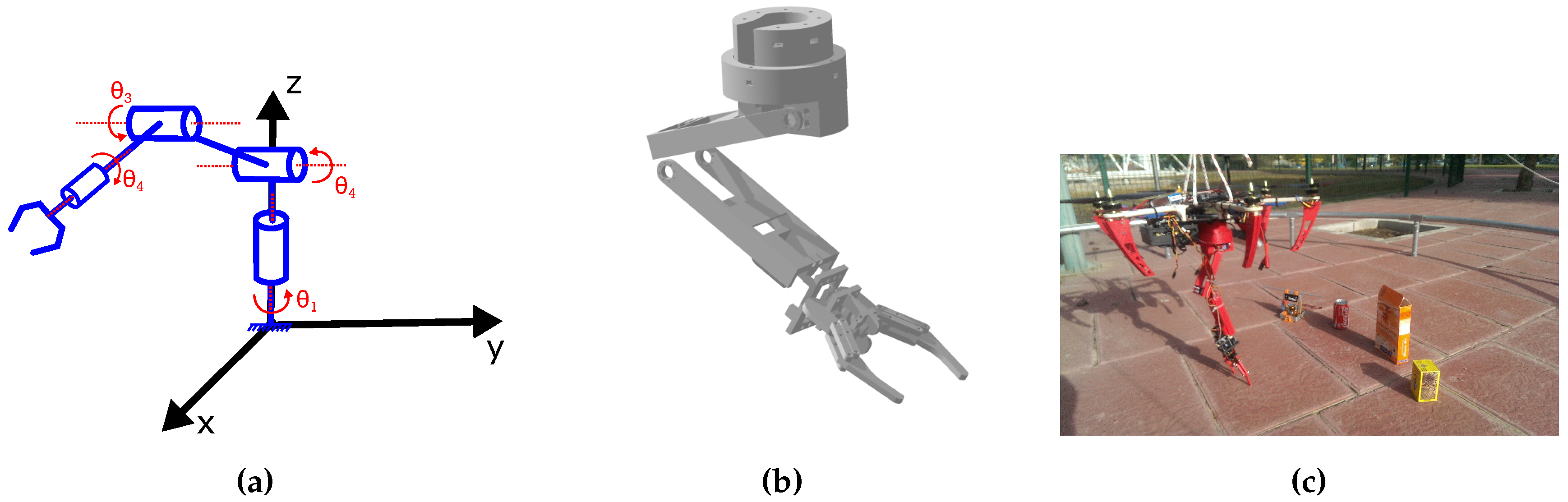
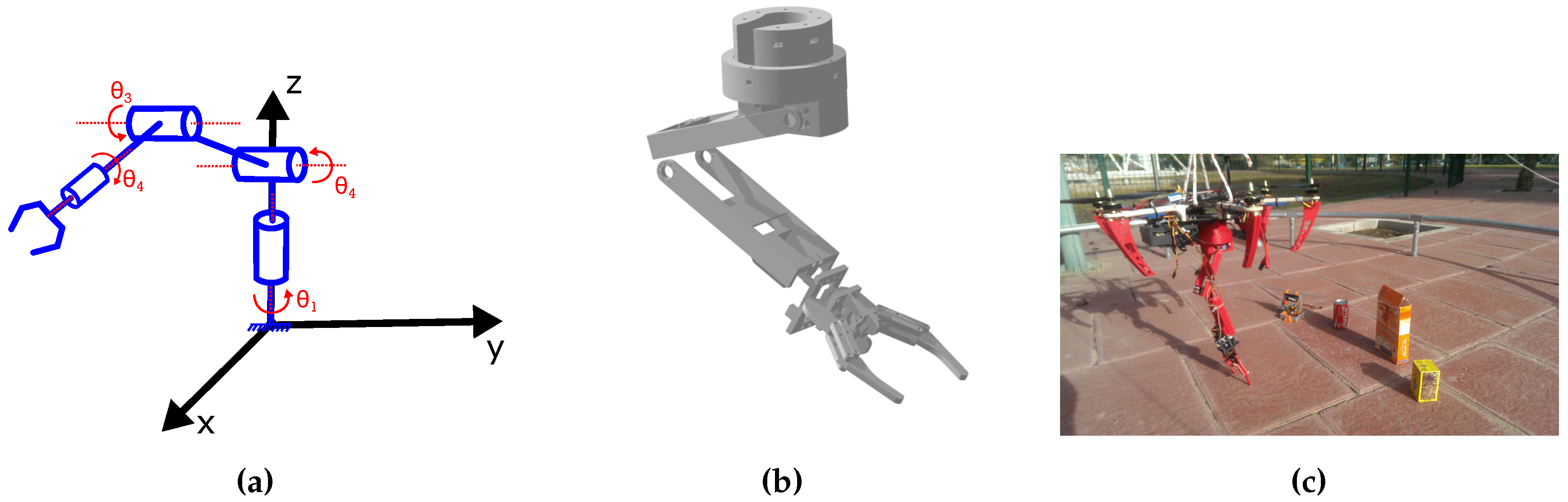
4.1. Hardware Setup
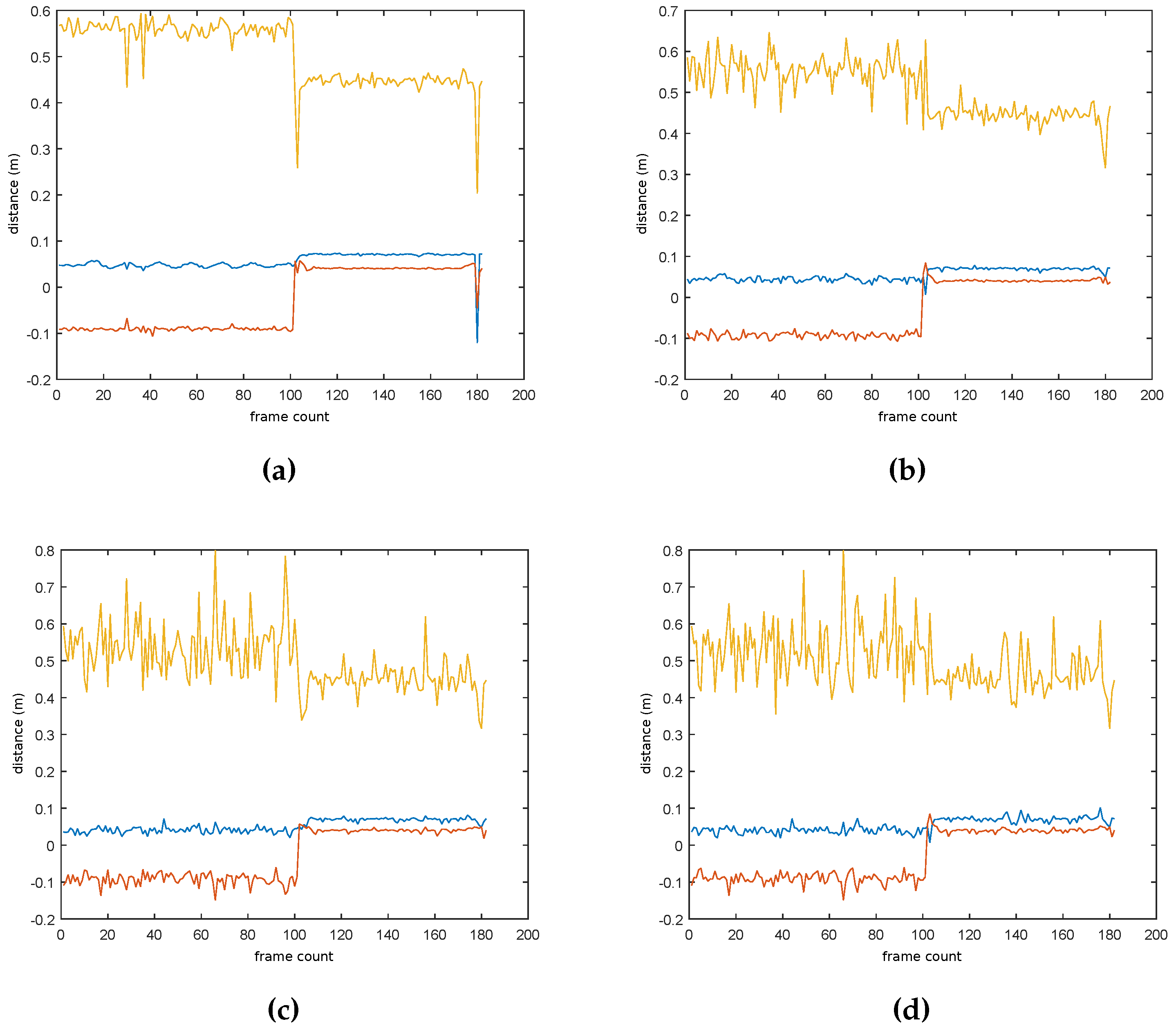
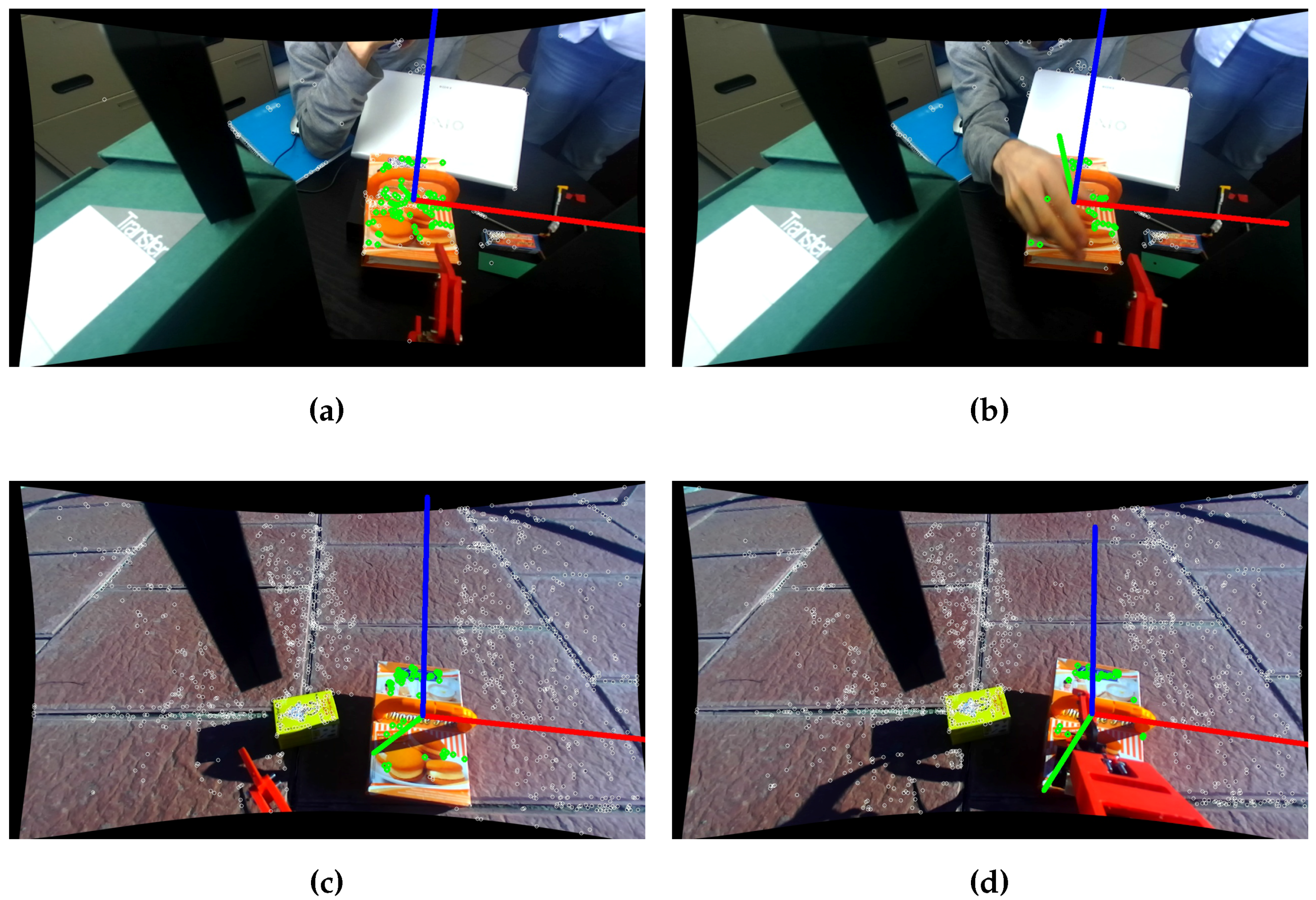
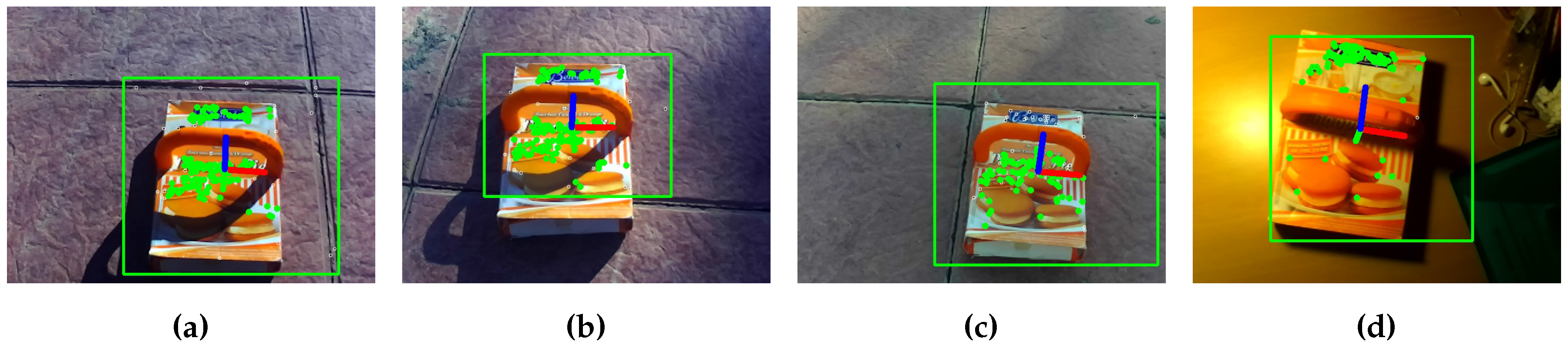
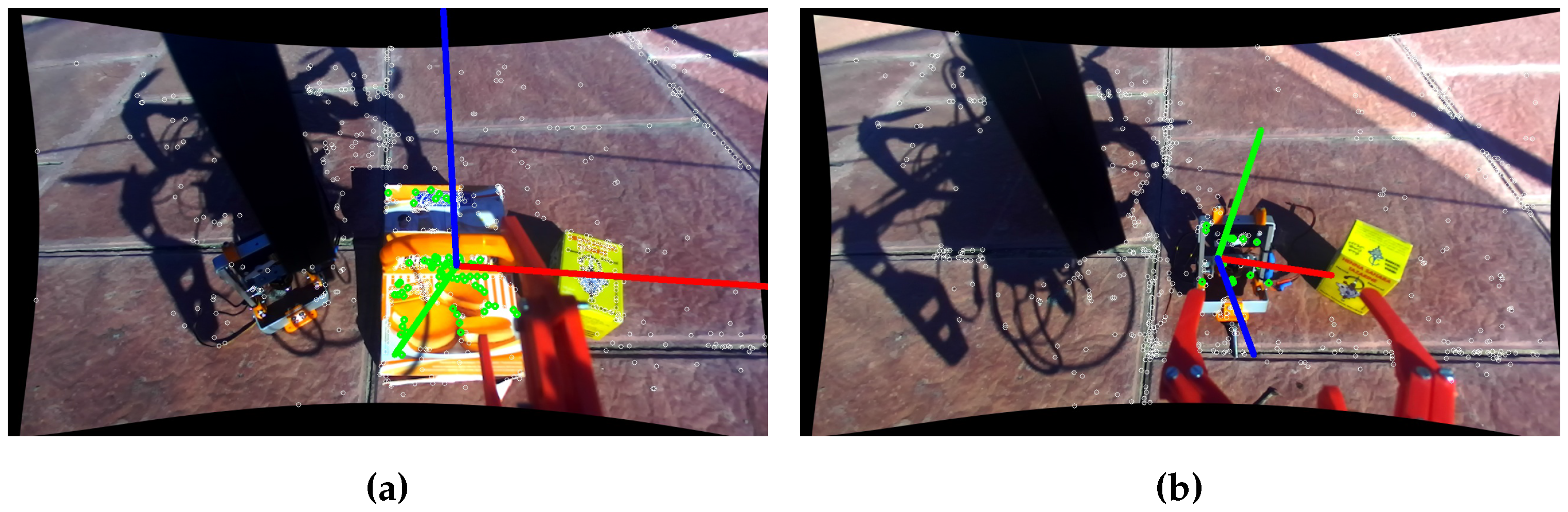
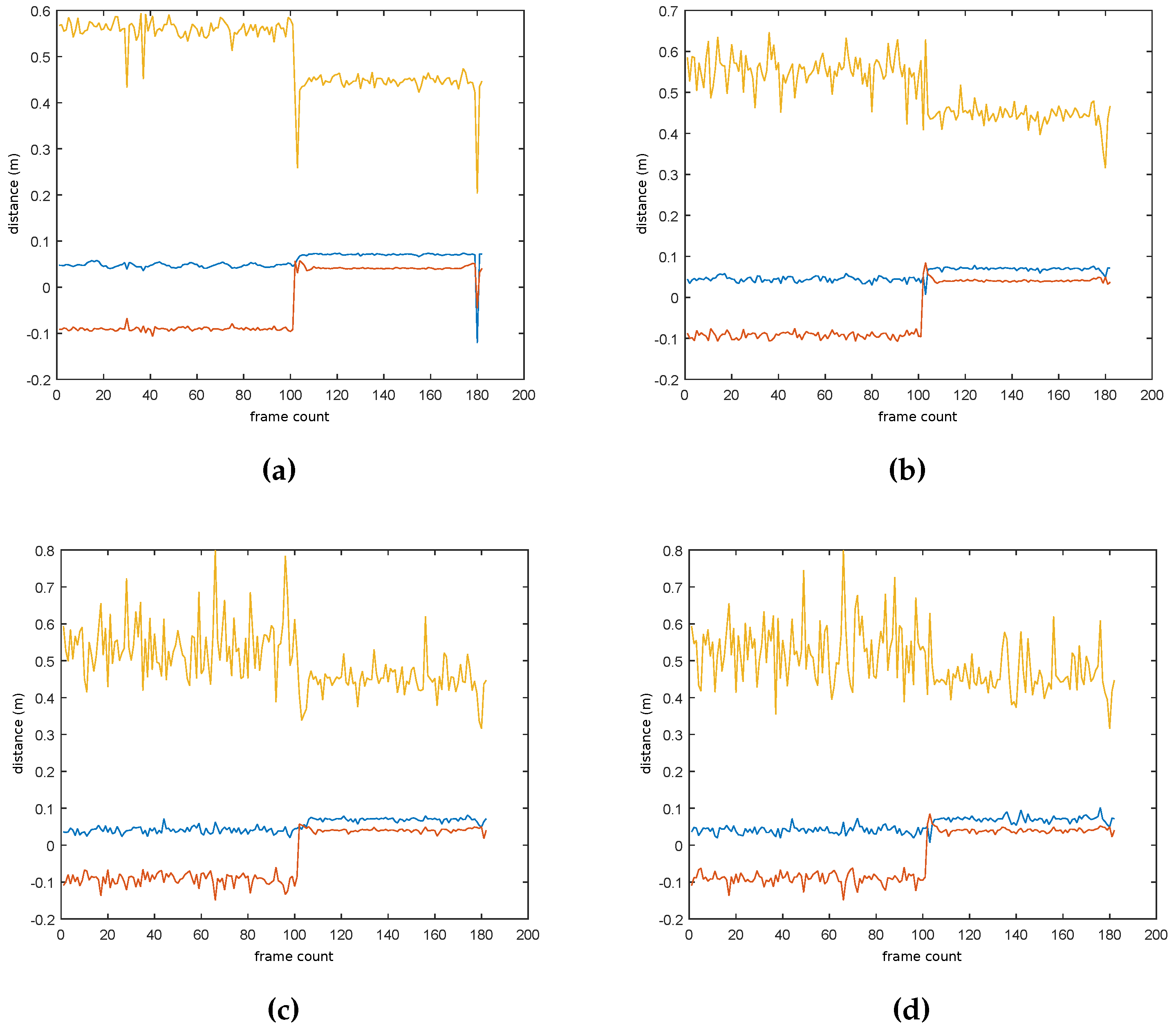
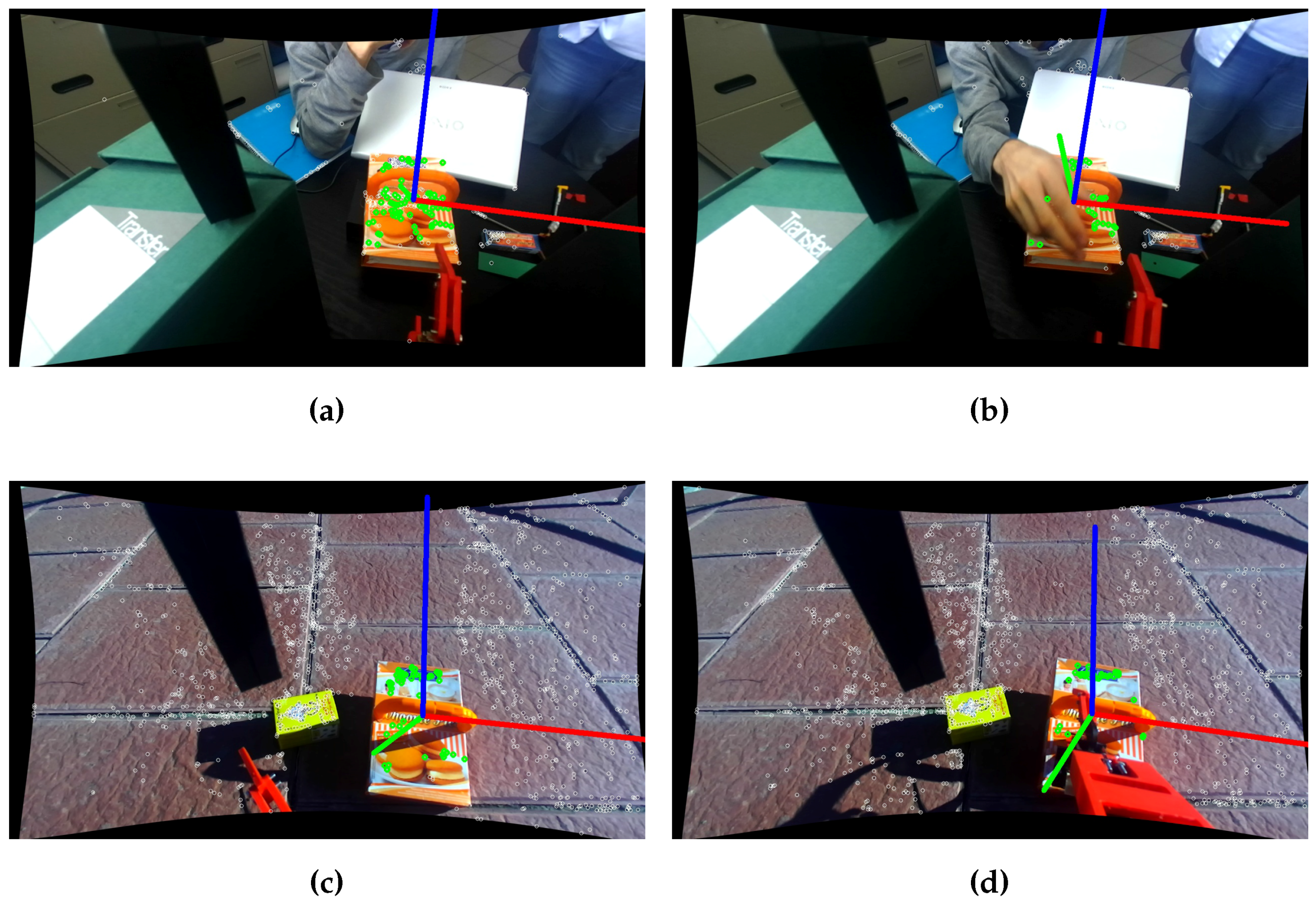
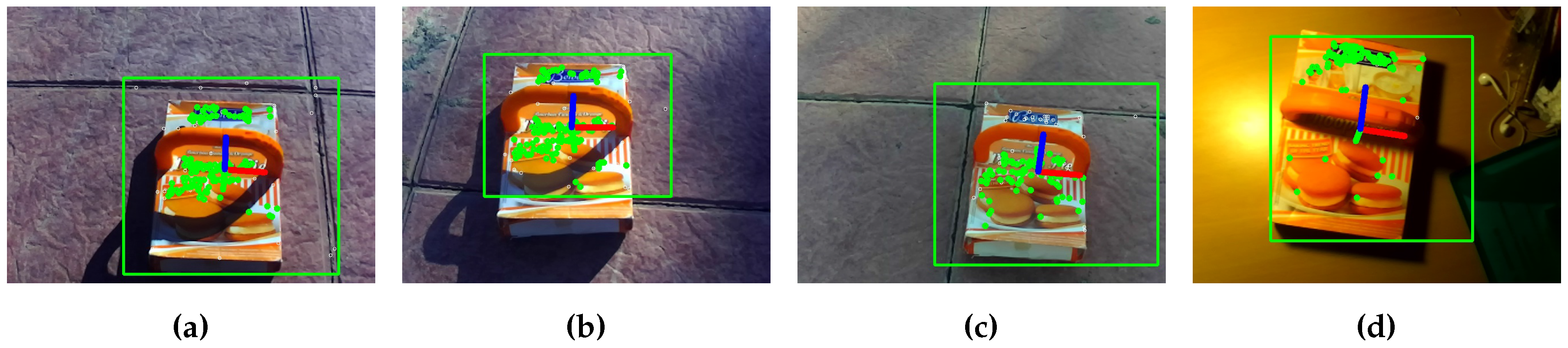
4.2. Validation Tests
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pajares, G. Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–329. [Google Scholar] [CrossRef]
- Roa, M.A.; Suárez, R. Grasp quality measures: Review and performance. Auton. Robot. 2015, 38, 65–88. [Google Scholar] [CrossRef] [PubMed]
- Gordon, I.; Lowe, D.G. What and Where: 3D Object Recognition with Accurate Pose. In Toward Category-Level Object Recognition; Ponce, J., Hebert, M., Schmid, C., Zisserman, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 67–82. [Google Scholar]
- Collet, A.; Berenson, D.; Srinivasa, S.S.; Ferguson, D. Object Recognition and Full Pose Registration from a Single Image for Robotic Manipulation. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3534–3541.
- Lenz, I.; Lee, H.; Saxena, A. Deep Learning for Detecting Robotic Grasps. Int. J. Robot. Res. 2015, 34, 705–724. [Google Scholar] [CrossRef]
- Malisiewicz, T.; Gupta, A.; Efros, A.A. Ensemble of Exemplar-SVMs for Object Detection and Beyond. In Proceedings of the 2011 IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011.
- Rai, A.; Patchaikani, P.K.; Agarwal, M.; Gupta, R.; Behera, L. Grasping Region Identification in Novel Objects Using Microsoft Kinect. In Neural Information Processing; Huang, T., Zeng, Z., Li, C., Leung, C.S., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 172–179. [Google Scholar]
- Roy, N.; Newman, P.; Srinivasa, S. Recognition and Pose Estimation of Rigid Transparent Objects with a Kinect Sensor. In Robotics: Science and Systems VIII; MIT Press: Los Angeles, CA, USA, 2013. [Google Scholar]
- Zhu, M.; Derpanis, K.G.; Yang, Y.; Brahmbhatt, S.; Zhang, M.; Phillips, C.; Lecce, M.; Daniilidis, K. Single image 3D object detection and pose estimation for grasping. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3936–3943.
- Marchand, E.; Bouthemy, P.; Chaumette, F.; Moreau, V. Robust real-time visual tracking using a 2D-3D model-based approach. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 1, pp. 262–268.
- Klingbeil, E.; Rao, D.; Carpenter, B.; Ganapathi, V.; Ng, A.Y.; Khatib, O. Grasping with application to an autonomous checkout robot. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2837–2844.
- Saxena, A.; Driemeyer, J.; Ng, A.Y. Robotic Grasping of Novel Objects Using Vision. Int. J. Robot. Res. 2008, 27, 157–173. [Google Scholar] [CrossRef]
- Dragiev, S.; Toussaint, M.; Gienger, M. Uncertainty aware grasping and tactile exploration. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 113–119.
- Pelossof, R.; Miller, A.; Allen, P.; Jebara, T. An SVM learning approach to robotic grasping. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 3512–3518.
- Pounds, P.E.I.; Bersak, D.R.; Dollar, A.M. Grasping from the air: Hovering capture and load stability. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2491–2498.
- Spica, R.; Franchi, A.; Oriolo, G.; Bülthoff, H.H.; Giordano, P.R. Aerial grasping of a moving target with a quadrotor UAV. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Piscataway, NJ, USA, 7–12 October 2012; pp. 4985–4992.
- Orsag, M.; Korpela, C.; Pekala, M.; Oh, P. Stability control in aerial manipulation. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2011; pp. 5581–5586.
- Danko, T.W.; Chaney, K.P.; Oh, P.Y. A parallel manipulator for mobile manipulating UAVs. In Proceedings of the 2015 IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 11–12 May 2015; pp. 1–6.
- Fabresse, F.R.; Caballero, F.; Maza, I.; Ollero, A. Localization and mapping for aerial manipulation based on range-only measurements and visual markers. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2100–2106.
- Buonocore, L.R.; Cacace, J.; Lippiello, V. Hybrid visual servoing for aerial grasping with hierarchical task-priority control. In Proceedings of the 23th Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015; pp. 617–623.
- Laiacker, M.; Schwarzbach, M.; Kondak, K. Automatic aerial retrieval of a mobile robot using optical target tracking and localization. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–7.
- Thomas, J.; Loianno, G.; Sreenath, K.; Kumar, V. Toward Image Based Visual Servoing for Aerial Grasping and Perching. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014.
- Ramon Soria, P.; Bevec, R.; Arrue, B.C.; Ude, A.; Ollero, A. Extracting Objects for Aerial Manipulation on UAVs Using Low Cost Stereo Sensors. Sensors 2016, 16, 700. [Google Scholar] [CrossRef] [PubMed]
- Small Mini PC. Available online: http://www.intel.com/content/www/us/en/nuc/overview.html (accessed on 5 January 2017).
- The World’s First 3D Camera for Depth Sensing and Motion Tracking. Available online: https://www.stereolabs.com/ (accessed on 5 January 2017).
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Alhwarin, F.; Ristić-Durrant, D.; Gräser, A. VF-SIFT: Very Fast SIFT Feature Matching. In Pattern Recognition; Goesele, M., Roth, S., Kuijper, A., Schiele, B., Schindler, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 222–231. [Google Scholar]
- Grabner, M.; Grabner, H.; Bischof, H. Fast Approximated SIFT. In Computer Vision – ACCV 2006; Narayanan, P.J., Nayar, S.K., Shum, H.Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 918–927. [Google Scholar]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF: Speeded up Robust Features. In Computer Vision – ECCV 2006; Leonardis, A., Bischof, H., Pinz, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 404–417. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An Efficient Alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571.
- Tola, E.; Lepetit, V.; Fua, P. A Fast Local Descriptor for Dense Matching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008.
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. BRIEF: Binary Robust Independent Elementary Features. In Computer Vision—ECCV 2010; Daniilidis, K., Maragos, P., Paragios, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 778–792. [Google Scholar]
- Rosten, E.; Porter, R.; Drummond, T. Faster and Better: A Machine Learning Approach to Corner Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 105–119. [Google Scholar] [CrossRef] [PubMed]
- Muja, M.; Lowe, D.G. Fast Matching of Binary Features. In Proceedings of the 2012 Ninth Conference on Computer and Robot Vision (CRV), Toronto, ON, Canada, 28–30 May 2012; pp. 404–410.
- Collet Romea, A.; Berenson, D.; Srinivasa, S.; Ferguson, D. Object Recognition and Full Pose Registration from a Single Image for Robotic Manipulation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA ’09), Kobe, Japan, 12–17 May 2009.
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle Adjustment—A Modern Synthesis. In Vision Algorithms: Theory and Practice; Springer: London, UK, 2000; pp. 298–372. [Google Scholar]
- Lourakis, M.A.; Argyros, A. SBA: A Software Package for Generic Sparse Bundle Adjustment. ACM Trans. Math. Softw. 2009, 36, 1–30. [Google Scholar] [CrossRef]
- Marquardt, D.W. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Open-Hardware Autopilot. Available online: https://pixhawk.org/ (accessed on 5 January 2017).
- Arduino. Available online: https://www.arduino.cc (accessed on 5 January 2017).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FAST Detector | SIFT Detector | SURF Detector | ||||
|---|---|---|---|---|---|---|
| 640 × 480 | 1280 × 720 | 640 × 480 | 1280 × 720 | 640 × 480 | 1280 × 720 | |
| SIFT descriptor | 0.318 s | 0.739 s | 0.510 s | 1.299 s | 1.532 s | 2.412 s |
| BRIEF descriptor | 0.042 s | 0.214 s | 0.250 s | 0.660 s | 0.235 s | 1.012 s |
| rBRIEF descriptor | 0.045 s | 0.229 s | 0.237 s | 0.715 s | 0.256 s | 1.100 s |
| SURF descriptor | 0.074 s | 0.215 s | 0.380 s | 0.986 s | 0.368 s | 1.098 s |
| DAISY descriptor | 0.319 s | 0.876 s | 0.523 s | 1.516 s | 0.489 s | 1.421 s |
| Reprojection Error | ||||
|---|---|---|---|---|
| 3 pxs. | 5 pxs. | 7 pxs. | 8 pxs. | |
| 0.031 s | 0.028 s | 0.025 s | 0.024 s | |
| 0.036 s | 0.031 s | 0.027 s | 0.026 s | |
| 0.039 s | 0.034 s | 0.028 s | 0.028 s | |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramon Soria, P.; Arrue, B.C.; Ollero, A. Detection, Location and Grasping Objects Using a Stereo Sensor on UAV in Outdoor Environments. Sensors 2017, 17, 103. https://doi.org/10.3390/s17010103
Ramon Soria P, Arrue BC, Ollero A. Detection, Location and Grasping Objects Using a Stereo Sensor on UAV in Outdoor Environments. Sensors. 2017; 17(1):103. https://doi.org/10.3390/s17010103
Chicago/Turabian StyleRamon Soria, Pablo, Begoña C. Arrue, and Anibal Ollero. 2017. "Detection, Location and Grasping Objects Using a Stereo Sensor on UAV in Outdoor Environments" Sensors 17, no. 1: 103. https://doi.org/10.3390/s17010103
APA StyleRamon Soria, P., Arrue, B. C., & Ollero, A. (2017). Detection, Location and Grasping Objects Using a Stereo Sensor on UAV in Outdoor Environments. Sensors, 17(1), 103. https://doi.org/10.3390/s17010103