1. Introduction
In the application of building imaging detection based on through-wall-radar, in addition to the moving human targets [
1,
2], the building wall layout and the stationary targets in the building (such as furniture, appliances and stationary humans) are the other two basic detection objects [
3,
4,
5,
6]. Because of the scattering difference and wall penetration attenuation, the echo intensity of the building’s walls is much higher than that of the stationary targets in a building. Therefore, different processing modes are desired to obtain the wall layout image and stationary target images.
With regard to the wall layout imaging, the effect from the weak echoes of the stationary targets in the building can be neglected. Due to the approximate mirror reflection in the wall surface, most of the existing methods obtain the echoes of all building walls (i.e., generate a panorama layout image with the images of all building walls) by two rounds of synthetic aperture multi-location detection along with two adjacent sides of the building from two separate vertical views with two-sided wall surfaces [
7,
8,
9,
10,
11]. In this case, data collection and processing are complicated, and the building surroundings are required to satisfy the two-side synthetic aperture detection, which harms the feasibility of wall layout imaging. A multi-view fusion approach is presented to implement rough imaging for all building walls. It performs a long-path synthetic aperture detection with a vertical view and two squint-views along with one building side [
12]. Nevertheless, the long-path pass and the obscure imaging quality are issues that must be noted.
The imaging of the stationary targets in a building is realizable if enough target echoes are collected along with one building side, whether the synthetic aperture multi-location detection or multiple-input multiple-output (MIMO) real aperture single-location detection [
13,
14,
15,
16] is used. As for the stationary targets, the wall echoes behave like strong clutters. The images of stationary targets, especially targets near walls, are smeared or even masked by the side-lobes of wall images [
17,
18,
19,
20]. The existing suppression methods of wall echoes, such as adaptive filtering [
17], subspace projection [
18,
19] and CLEAN[
20], suffer a severe performance decline under the condition of inhomogeneous walls. Moreover, there exist chaotic multi-path clutters in the enclosed building space, which result from the propagation interactions of target-to-wall (including other building structures, such as floors and ceilings, as well) and target-to-target and bring about the ghost interferences for the images of stationary targets [
21,
22,
23,
24,
25,
26,
27,
28,
29,
30]. With regard to the multi-paths associated with walls, the existing algorithms find the positions of multi-path ghosts in the image domain [
21,
22] or multi-path clutters in the raw data domain [
23] and then remove the ghosts or clutters on the basis of the known positions and the ideal mirror reflection characteristic of the walls. However, in real applications, wall positions are unknown prior to analysis, and the assumption of ideal mirror reflection is not credible. Moreover, for [
21,
22], when there are multiple targets, the images of some targets are superposed with the ghosts of other targets resulting in improper removal of true targets. The suppression algorithms focusing on the multi-path ghosts from target-to-target interactions are developed in [
24,
25] based on multi-path aspect-dependent features and sub-aperture imaging strategies. For all types of multi-paths, the better suppression algorithm is proved to be the multi-view image fusion based on the distribution difference of multi-path ghosts in two single-view images, which are generated from the collected echoes at two adjacent sides of the building with two different views vertical with the two-side walls [
26,
27,
28]. Nevertheless, just like the aforementioned wall layout imaging, the algorithm practicability is limited by the two-side detection, especially two-side synthetic aperture detection. Besides, the coherence factor is applied in [
29] to suppress the low-coherence multi-path ghosts in through-wall-radar imaging while it is not suitable for the mode of synthetic aperture detection due to the fully-coherent-focusing property for each multi-path ghost [
30].
In this paper, based on MIMO through-wall-radar, we present the single-side two-location spotlight imaging for the wall layout and stationary targets in a building. Two proper locations are selected on one side of the building to deploy the MIMO through-wall-radar successively in two different spotlight views oblique to the walls, acquiring the echoes of all building corners located at the junctions of every two adjacent walls and all stationary targets. At each location, the echoes of some of the building corners and all or some stationary targets are collected to form a single-location image, including the images of these corners and stationary targets. Corresponding to these two detection locations, two single-location images are obtained and then, through incoherent addition fusion and two-dimensional cell-averaging constant-false-alarm-rate (2D CA-CFAR) detection, combined into a panorama image consisting of the images of all building corners and all stationary targets. Instead of the wall images in the aforementioned wall layout imaging, based on the intensity difference with respect to the target images, the corner images can be extracted to speculate the layout of the building walls indirectly. For the proposed imaging method, the single-side two-location real aperture detection is easy to implement in the real building surroundings, and the multi-path clutters are reduced in the case of squint-view detection in comparison to the vertical-view detection. Moreover, compared with the wall images, the corner images are provided with a smaller distribution area, whose sidelobes interfere less with the images of stationary targets. The preliminary results based on Computer Simulation Technology (CST) electromagnetic simulation software are provided to validate the presented single-side two-location spotlight imaging method.
2. Single-Side Two-Location Spotlight Imaging Model
For simplification, a simple and typical building with four walls and four corners and a point target in the building are considered, as shown in
Figure 1. Considering the approximate mirror reflection on the wall surface, it is difficult to collect the echoes of all building walls only along with one side of the building and then to generate the images of all walls for determining the wall layout directly. Fortunately, there exists a fixed relationship between the corners and walls of the building, namely the corner is located at the junction of two adjacent walls in general, and it is feasible to collect the echoes of all building corners only at one side of the building. Consequently, in this paper, instead of collecting wall echoes in the existing imaging method for wall layout, the echoes of all corners are desired to be acquired at one side and then used to generate the images of all corners, which can be employed to speculate about the wall layout.
In order to prevent complicated synthetic aperture detection and guarantee high azimuth resolution, the MIMO array is utilized for through-wall-radar real-aperture detection. Based on the consideration of the limited beam width, at one side of the building, at least two detection locations, such as A and B, are necessary to deploy the MIMO through-wall-radar in sequence in order to collect the echoes of all building corners and stationary targets along with two different spotlight views oblique to the walls. As operation guidance, we provide two deployment zones, as shown in
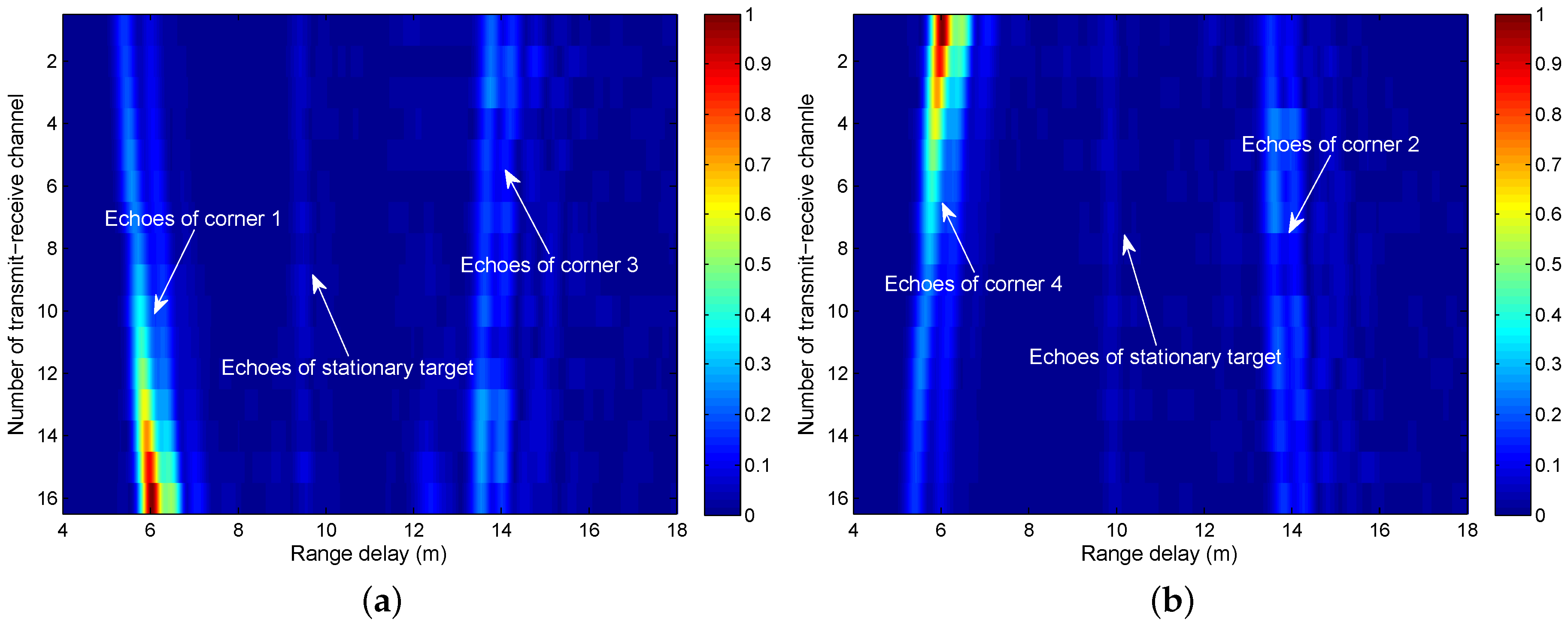
Figure 1, where two detection locations can be selected appropriately according to the building structure and surroundings (one detection location versus one deployment zone). At each detection location, the echoes of a part of corners and all or partial stationary targets are obtained. For example, at Location A, the Corners 1 and 3 and the stationary target serve as the echoes, while the echoes of the Corners 2 and 4 coupled with the stationary target are collected at Location B.
In addition to convenience, the squint-view detection also brings about two other advantages over the traditional vertical-view detection. The first one is fewer multi-path clutters, in other words fewer multi-path ghosts for the stationary target image. As shown in
Figure 2, in order to simplify the analysis, only the first-order multi-paths associated with walls are considered by the dotted lines. It is clear that the squint-view detection makes the multi-path assigned to the left wall disappear compared with the vertical-view detection. In other words, the squint-view detection removes the multi-path of a one-sided wall. The second is that the formed corner images in the squint-view detection have much smaller distribution regions than the formed wall images in the vertical-view detection. Therefore, the sidelobe interferences on the stationary target image are reduced significantly by generating the corner images to substitute for the wall images. Moreover, considering the different squint-view detections in the two locations, the view dependence of multi-path ghosts and corner images makes it possible to reduce the ghosts and side-lobe interferences further through suitable fusion for two single-location images.
It should be mentioned that the squint-view detection gives rise to a decline of achievable spatial azimuth resolution in contrast to the vertical-view detection because of the larger range between the MIMO radar and a fixed target in the same rectangular coordinates.
3. Imaging Processing for Two-Location MIMO Radar Echoes
Assume the MIMO through-wall-radar in
Figure 1 is operating with the ultra-wide-band pulse signal and
N transmit-receive channels. Through the squint-view spotlight detection at Locations A and B successively, two groups of MIMO real-aperture echoes are collected as
and
, which are utilized to generate two single-location images
and
based on the back-projection imaging algorithm as:
where
is the value of the pixel located at
in the single-location image
.
and
are the focusing delays defined as the propagation delays between the pixel at
and the transmit-receive antennas of the
n-th channel at Locations A and B. From Array Positions A and B, the near corners, namely Corner 1 and Corner 4, consist of the free-space propagation condition, while the far corners (Corner 2 and Corner 3) and stationary target conform to the through-wall propagation situation. Consequently, the compensation of the wall effect is necessary to calculate the focusing delays accurately for the far corners and stationary target, but it is not required for the near corners. Under the conditions of known wall parameters or estimated wall parameters [
31], the time-delay minimization approach in [
32] can implement accurate wall compensation, but it suffers complex searching for four refraction points from the inside and outside surfaces of two adjacent walls in the case of squint-view detection. Therefore, in this paper, we employ the simple and approximate identical time-delay compensation method in [
33] to calculate the focusing delays
and
as:
where
is the rectilinear free-space propagation delay between the transmit-receive antennas and the pixel,
d is wall thickness,
is wall relative permittivity and
c is the velocity of light. The time-delay offset
is based on the assumption that the signal propagates through the wall always perpendicularly. Note that in order to perform wall compensation, the imaging scene needs to be divided into two sub-scenes where the near sub-scene only contains the near corners in free-space propagation and the far sub-scene just comprises the far corners and stationary target in through-wall propagation. The boundary of these two sub-scenes is set to the inside surface of front-wall which can be determined by the images of near corners. Therefore, we must first generate two single-location images without wall compensation and extract the strongest near corner images.
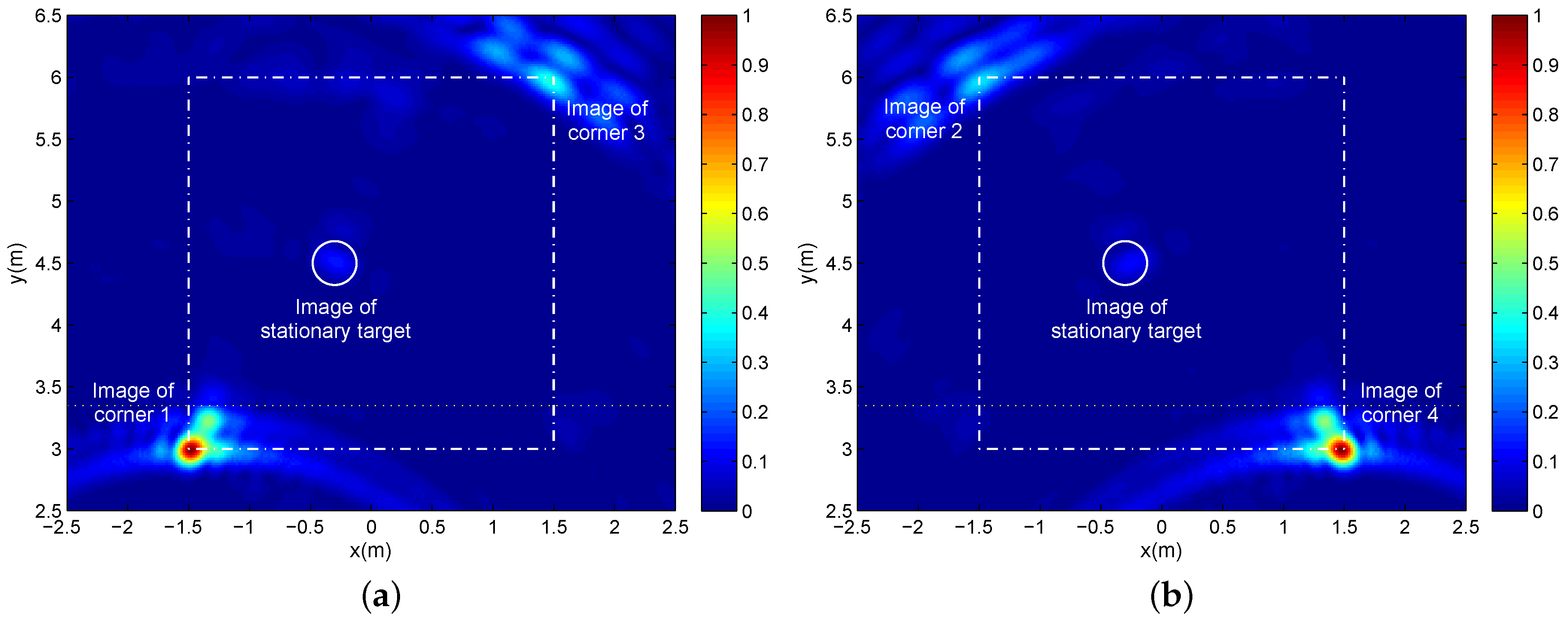
After the approximate wall compensation, in the single-location images and , the far corner images and stationary target image will suffer from minor defocusing and displacement to an acceptable extent. Moreover, it is worth noting that the single-location image at Location A contains the images of the stationary target and the Corners 1 and 3, while at Location B, in addition to the image of the stationary target, the single-location image only consists of the images of the other corners, namely Corners 2 and 4.
With respect to these two single-location images including different corner images and the same stationary target image, image fusion is required to combine them into a high-quality panorama image with clear images of all corners and the stationary target. In order to ensure peer-to-peer contribution for image fusion, these two single-location images are normalized firstly as:
where
is a pixel value of the normalized single-location image
,
returns the absolute value and
returns the maximum value.
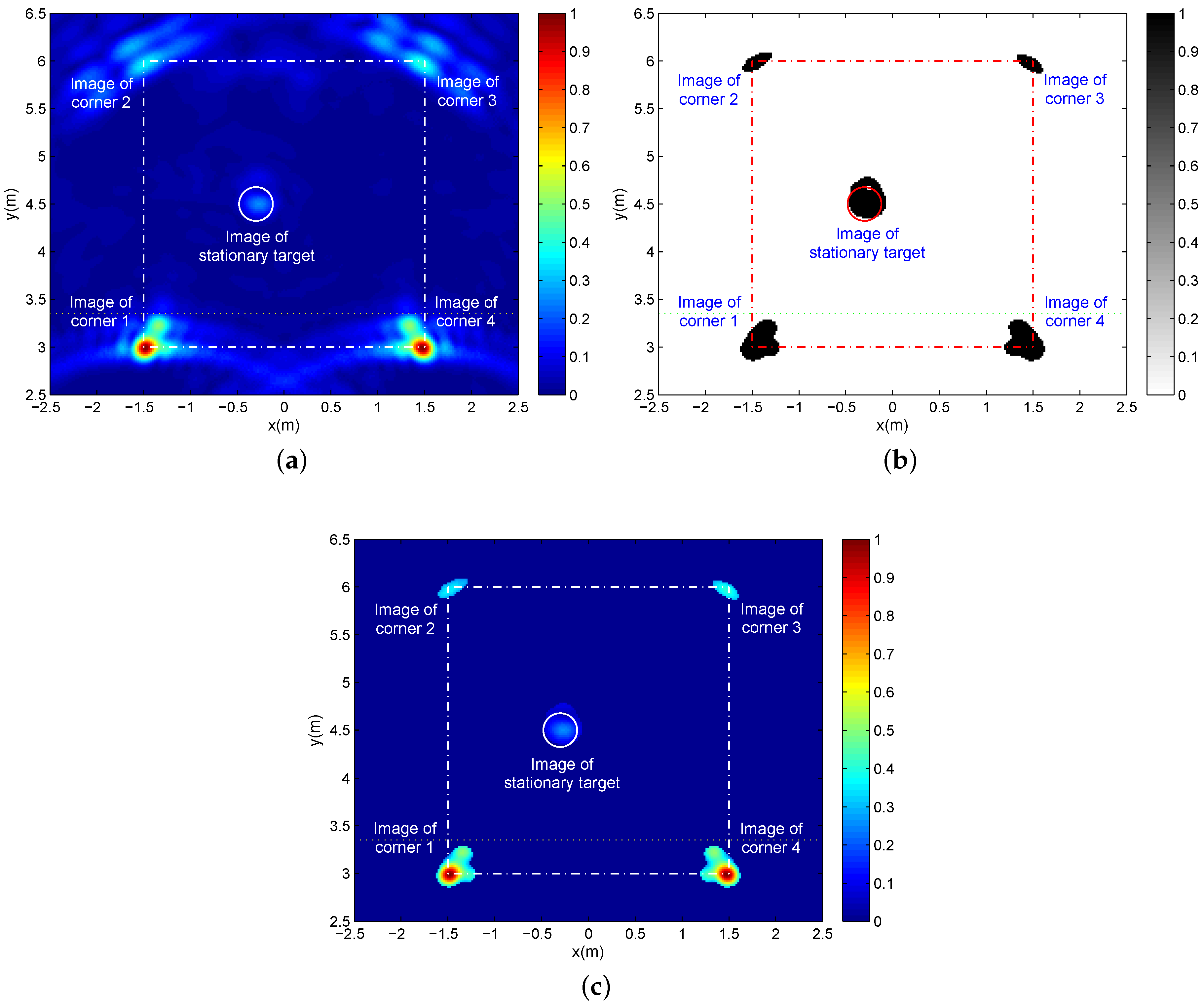
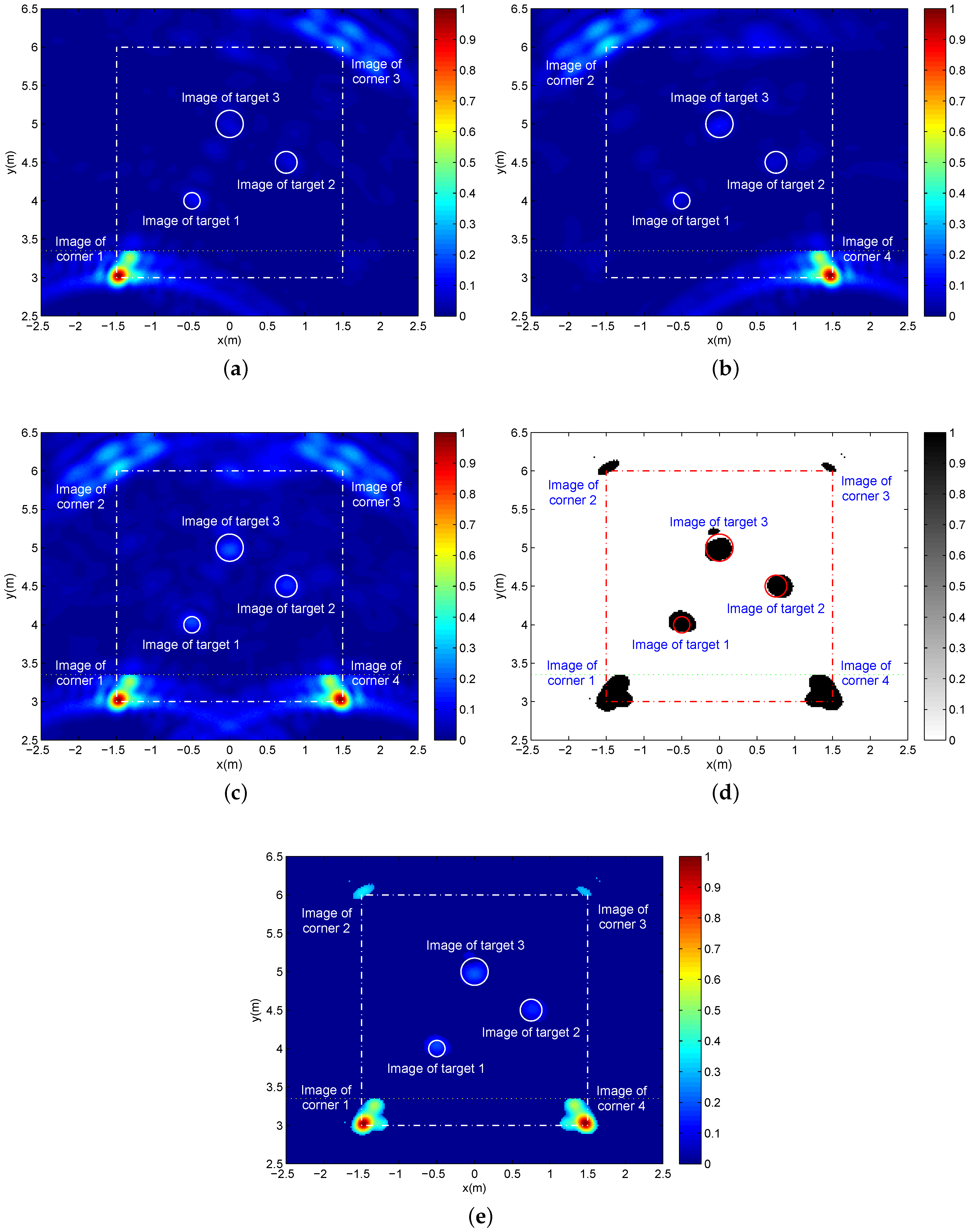
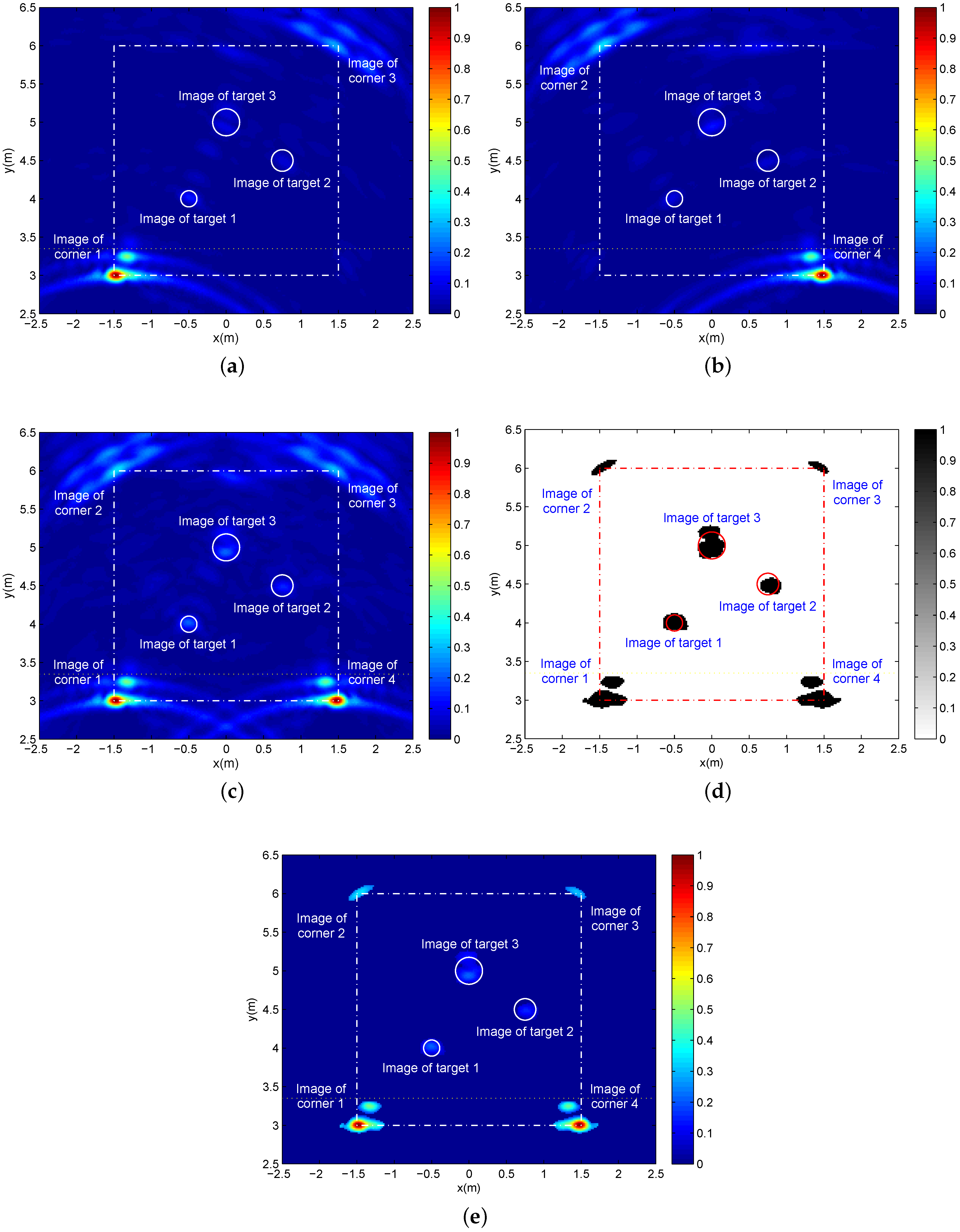
Based on the complementary distribution characteristic of corner images, these two normalized single-location images, namely
and
, are then combined into a panorama image
with all corner images and the stationary target image through the incoherent additive fusion as:
where
is the value of the pixel at
in the additive-fused panorama image
. It needs to be noticed that the incoherent rather than coherent additive fusion is chosen with respect to two stationary target images in these two single-location images
and
. That is because without considering the wall effects on propagation, two stationary target images are non-coherent. This is caused by the different displacements from two squint-views.
Although the panorama image consists of the images of all corners and the stationary target, due to the range difference, scattering difference and wall penetration attenuation, there exists a significant intensity difference among these corner images and between the corner images and the stationary target image. Moreover, the multi-path ghosts and the side-lobes of the corner images have an adverse impact on the stationary target image, as well. In this case, it is difficult to observe the clear images of all corners and stationary target simultaneously from the panorama image . Therefore, in this paper, we employ the 2D CA-CFAR detection for the image to generate a binary panorama image that is composed of the clear images of all corners and the stationary target with the same pixel value of one.
For the pixel at
of
, the test threshold of 2D CA-CFAR is given by:
where
is the constant-false-alarm probability,
is the value of the reference pixel around the tested pixel at
and
M is the number of all reference pixels. Besides, the discarded protection pixels need to be selected properly, confirming that all target pixels are not involved in the threshold calculation. Then, the test judgment for the pixel at
is performed as:
After implementing the test judgment for each pixel of , we obtain a binary panorama image with the clear images of all corners and the stationary target. Nevertheless, it is difficult to identify the corners and target from the binary image without more information and then to reconstruct the wall layout and determine the target position within the building.
Consider that the intensity difference between the corner images and the stationary target image can be used to implement image attribute identification. We furthermore generate a reference panorama image
maintaining the original images of all corners and the stationary target through the above 2D CA-CFAR detection processing with different outputs as:
In general, for a simple structure of a building, the corner images are coupled with higher intensity than the stationary target image. Therefore, based on the reference panorama image , we can use a simple judgment strategy to extract all corner images from the corresponding binary panorama image . With the help of a proper threshold, in the reference image , the stationary target image can be marked when its maximum pixel value is smaller than the threshold, and the other images are identified as the corner images. Based on the one-to-one correspondence relationship, in , the clear corner images and stationary target image can be divided and then be applied for speculating wall layout and determining target relative location within a building.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}