1. Introduction
Magnetic shape memory (MSM) alloys are a new and important member of the class of smart materials that have been widely studied since 1996 [
1,
2]. MSM alloys are mainly composed of Ni-Mn-Ga composites, but there are also other alternative composites [
3]. MSM alloys have the property called magnetic shape memory effect, which means its twin-variants in the phase martensite could be switched. The twin-variants can be induced to switch via the application of magnetic fields, and its maximum magnetic field induced strain is from 6% to 12%. The strain depends on the material composition and modulation [
4,
5,
6]. Shape memory alloys (SMA) exhibit similar behavior, but create large strains up to 8% by changing their temperature, allowing the alloys to switch between the martensite and austensite phases [
7]. Compared to SMAs, MSM alloys have the property of higher frequency response, since SMAs use heat transfer for phase change and MSM alloys inherently take advantage of the change of the twin-variants in the same phase with a much faster response. These properties of larger strain and faster response make MSM alloys potential candidate materials for many different applications.
An MSM actuator is an application based on the properties of MSM alloys. Though several composites are found to possess the MSM effect, the material made of Ni-Mn-Ga is chosen here based on its largest magnetic field induced strains within the alternatives [
2,
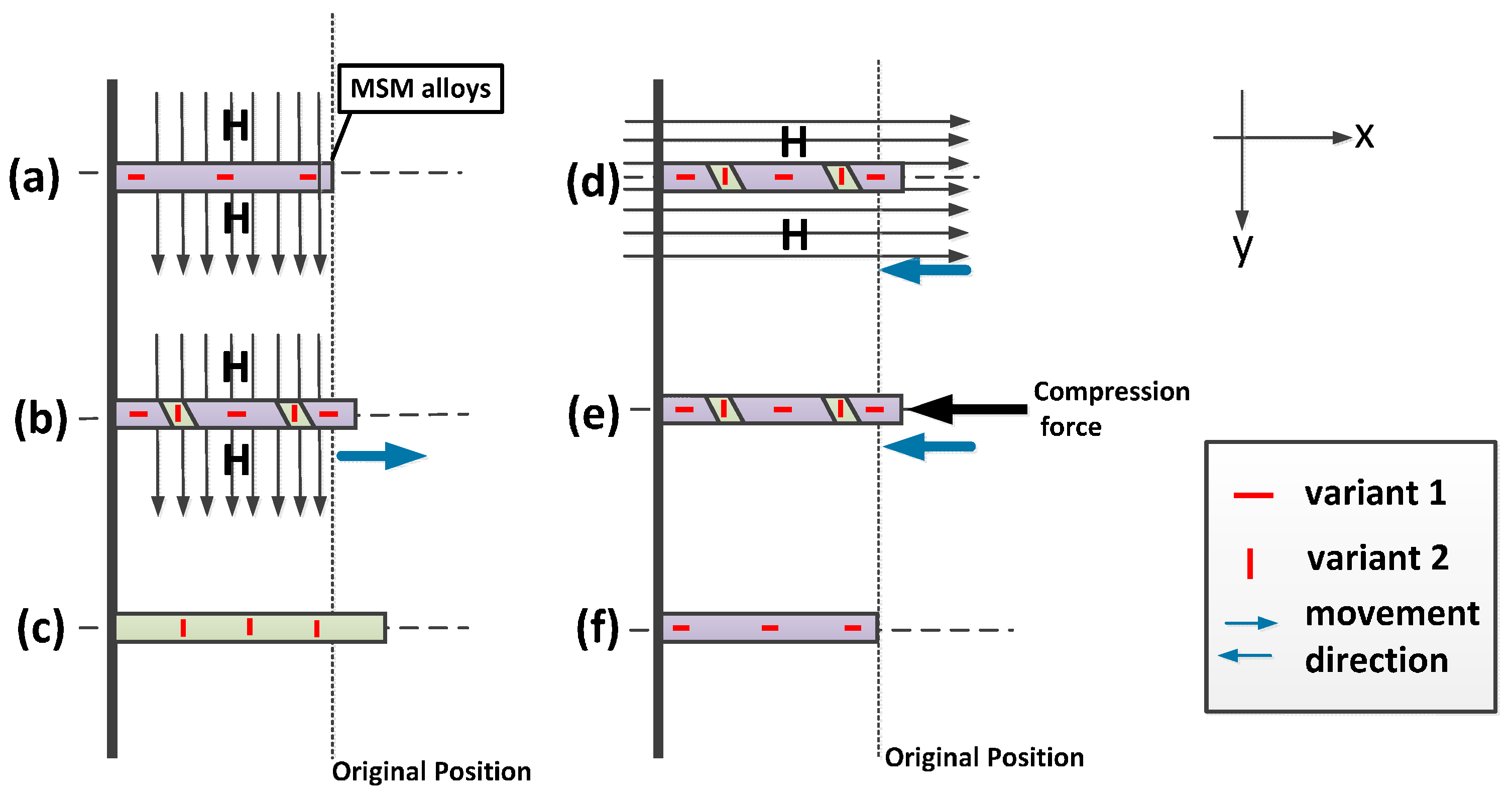
3]. In addition, a MSM actuator consists of magnetic circuits, MSM elements and returning force springs so that the function of reversible actuation can be repeated through the elongation and contraction of the MSM elements. The operational principle of MSM alloys is demonstrated in
Figure 1 [
8]. The strain is due to the switching between the twin-variants of MSM alloys. In the beginning, MSM alloys are maintained in the presence of variant 1, which is shown in
Figure 1a. The change from variant 1 to variant 2 is induced when the magnetic field passes perpendicularly through the MSM alloys as shown in
Figure 1b. The stronger the magnetic field, the faster the variant 1 can transform to variant 2. The maximum strain is achieved if variant 1 has fully changed to variant 2, as seen in the saturation in
Figure 1c. To contract the MSM alloys, which means to reverse variant 2 to variant 1, there are two ways to achieve this goal. One is to use another direction of the magnetic field, perpendicular to the original, as shown in
Figure 1d. The other is to add a compressive force to the MSM alloys by inserting a mechanical spring, as shown in
Figure 1e. In
Figure 1f, the MSM alloys contract to their original position if the magnetic field or the compressive force is strong enough [
9].
Since the MSM actuator uses the properties of MSM alloys, it also inherits the drawbacks of MSM alloys, namely the hysteresis non-linearity caused by the transformation of twin-variants and temperature changes [
11]. Many researchers have tried to model the properties from different perspectives. Using the microscopic perspective, researchers have modeled MSM alloys’ behavior by the variants’ structure and thermodynamic free energy. Thermodynamics of the mechanical and magnetic properties was modelled by Ullakko and Likhachev [
12]. O’Handley et al. [
13] have discussed the magnetic-field-induced strains of MSM alloys through the relationship between magnetization and twin-boundary motion by minimizing its free energy, which includes Zeeman energy, magnetic anisotropy energy, internal elastic energy and external stress. Hirsinger and Lexcellent [
14] introduced a phenomenological model about the variants’ rearrangement through thermodynamics with internal variables, which contains chemical energy, mechanical energy, magnetic and thermal energy. Gauthier et al. [
15] combined thermodynamics with Lagrangian formalism and its Hamiltonian extension as a dynamical model for an MSM alloy-based actuator. Tan and Elahinia [
16] described the dynamic behavior of a MSM actuator by combining its constitutive model, the reorientation kinetics, the kinematic model, and the dynamic model of the actuator. In these kinds of models, a complete understanding of the material structure and energy flow are necessary. However, to consider all of the influential factors increases the complexity of the model.
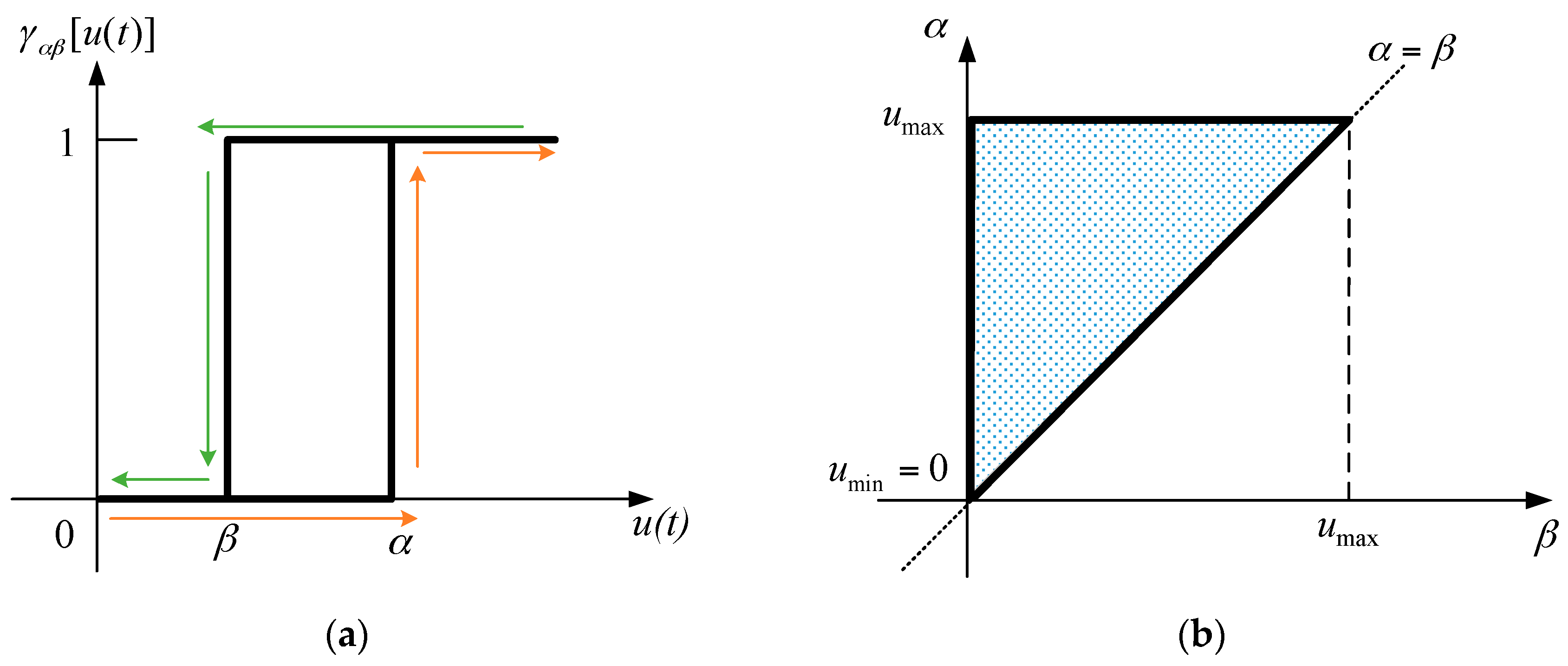
Researchers have used a mathematical model to describe the MSM alloys’ hysteresis phenomenon from the macroscopic perspective, which means the MSM alloys are regarded as a black box and the consideration is only its input as source signals and output as strain. The Preisach model is a method used to describe hysteresis and it is suitable for those smart materials possessing this property, such as piezoelectric, SMA, MSM alloys, etc. [
17,
18,
19,
20,
21]. Inverting the hysteresis models can be used to compensate for tracking control. The MSM actuator is described as a Preisach-like Krasnosel’skii–Pokrovskii model, combining the inverse model as compensation and adaptive control for positioning control by Riccardi et al. [
22,
23]. In addition to the Preisach model, Sadeghzadeh et al. [
24] used phase shift hysteresis compensation to describe the MSM actuator and combined with PID control and gain scheduling for position controller. Zhou et al. [
25,
26,
27] used an inverse Prandtl-Ishlinskii model to eliminate the influence of the hysteresis non-linearity and a PID neural network as hybrid control for the MSM actuator.
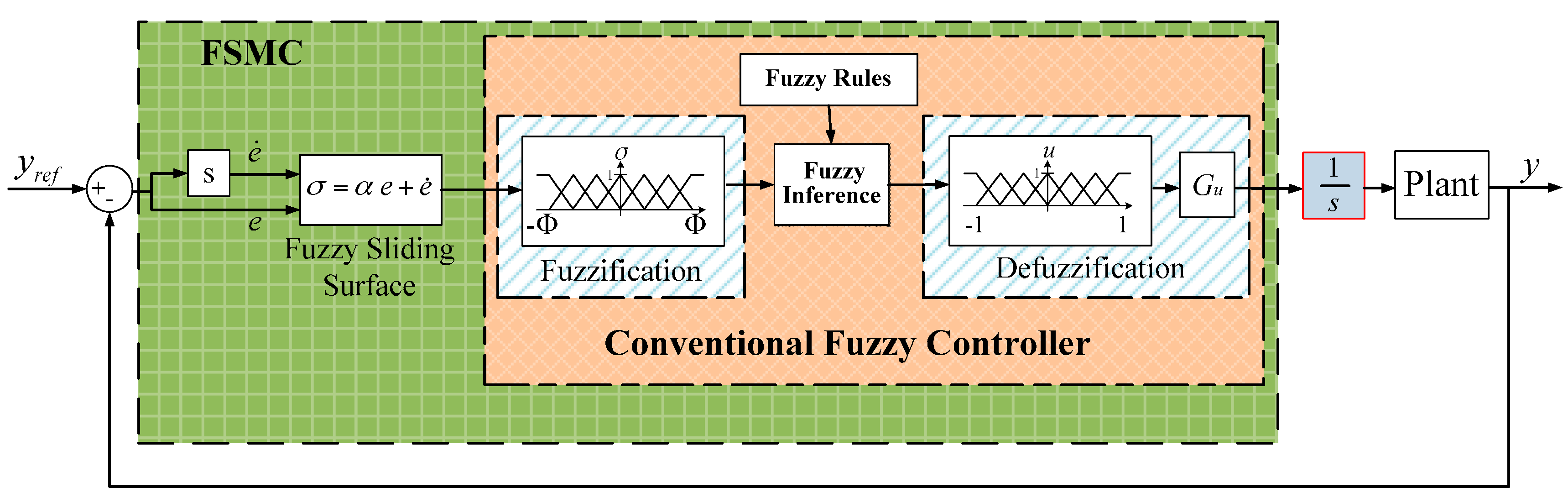
In previous studies, fuzzy sliding mode control (FSMC) had been used for MSM actuators to achieve a model-free and robust controller [
28], and the modified fuzzy sliding mode control (MFSMC) is proposed by adding an additional integrator in FSMC to prevent the control signal from approaching zero and track the desired position in the steady state [
10]. The purpose of this paper is follow-up research based on previous studies. There are some improvements in this paper. First, the test rig is an advanced design, so that the MSM actuator is suitable to work for the purpose of a tracking in the order of micrometers. Second, to enhance tracking ability, the accuracy of tracking error was improved through our novel controller.
In the following sections, firstly, the MSM actuator testbed and the main components are introduced.
Section 3 adopts the Preisach model with verified data from experiments to simulate the response of a MSM actuator, and then the inverse Preisach model by numerical recursive implementation in discrete time is applied as hysteresis compensator for the MSM actuator.
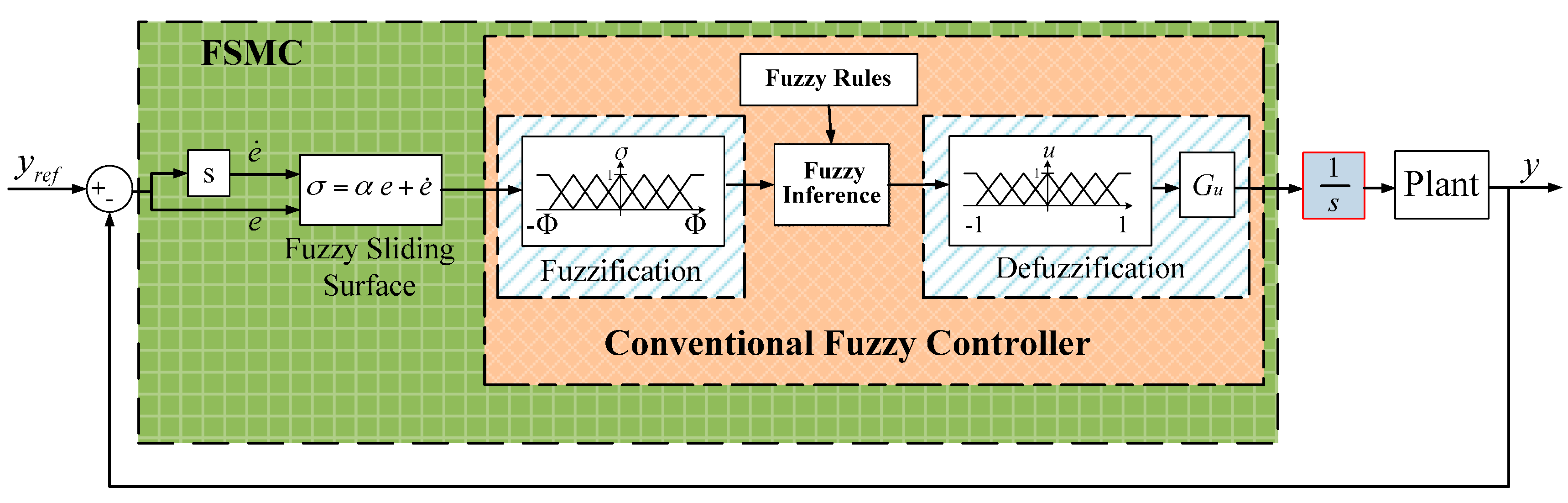
Section 4 explains the concept of fuzzy sliding mode control. Therefore, the inverse Preisach model, as a position prediction, is a hysteresis compensator and path controller MFSMC is integrated in this paper.
Section 5 shows the results of experiments, including results of using inverse Preisach solely, the results of using MFSMC solely, and the results of combining both controllers. Finally,
Section 6 is presents the conclusions of the paper.
2. MSM Actuator Overview
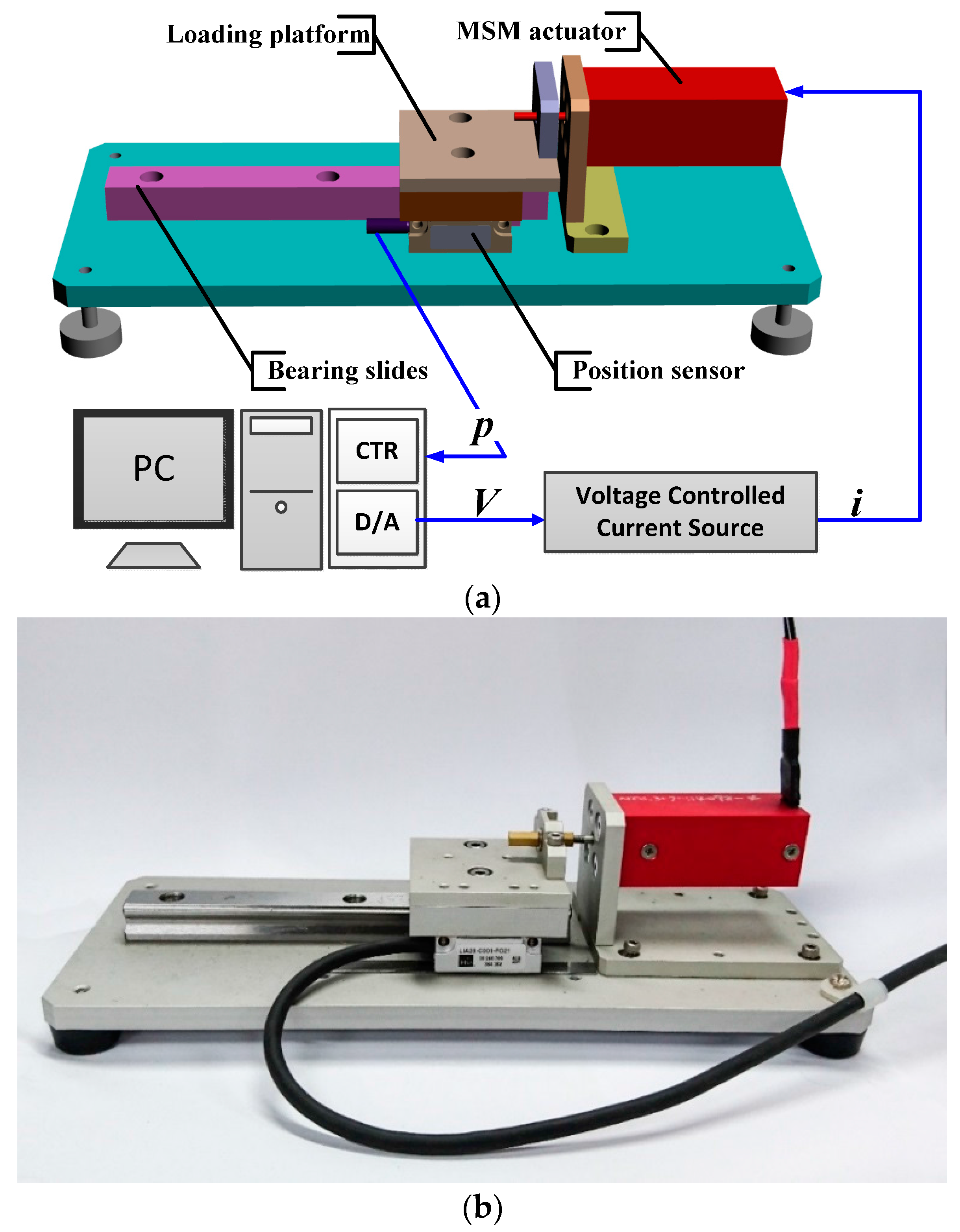
The MSM actuator experimental setup is shown in
Figure 2a, and the photo of the test rig is shown in
Figure 2b. The experimental setup is composed of a MSM actuator, bearing slides and a loading platform. The MSM actuator is the product made by AdaptaMat Ltd. (Helsinki, Finland), and its specifications are listed in
Table 1. The MSM alloy elongation is induced by the strength of a magnetic field which is passing through it perpendicularly. Increasing the magnetic field elongates MSM alloys, and decreasing the magnetic field compresses MSM alloys by the return spring, which can release the elastic potential energy that was stored from the elongation of MSM alloys. The MSM actuator is driven from a voltage controlled current source that can linearly covert voltages to currents. The position sensor, an optical encoder made by NUMERIK JENA GmbH (Jena, Germany) with resolution of 20 nm, measures the stroke of the MSM actuator. All the signals are sent out and fed back to a PC-based controller via a multifunction DAQ card, made by National Instruments (Austin, TX, USA). The sampling frequency is set as 1000 Hz.
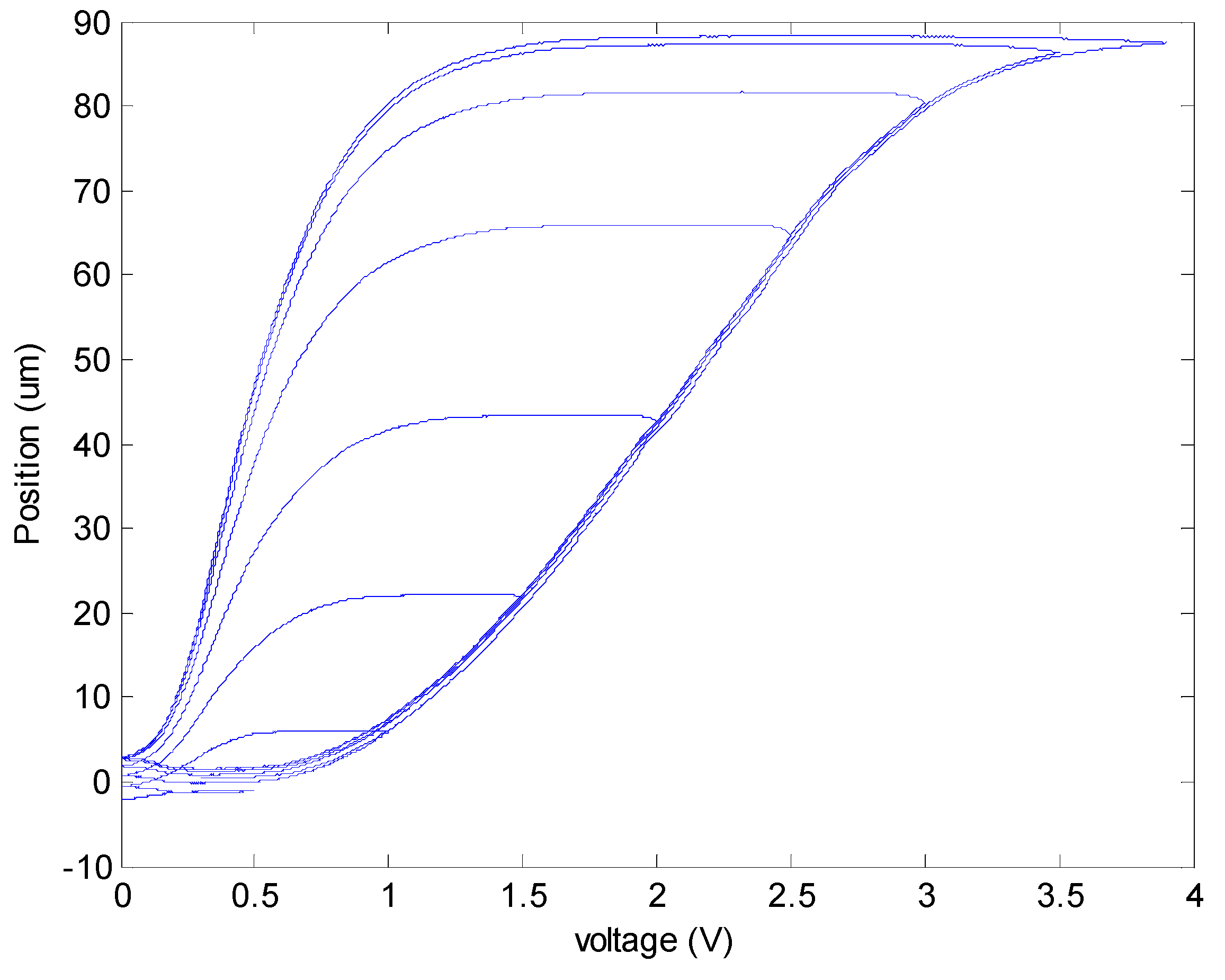
The hysteresis phenomenon of the MSM actuator is shown in
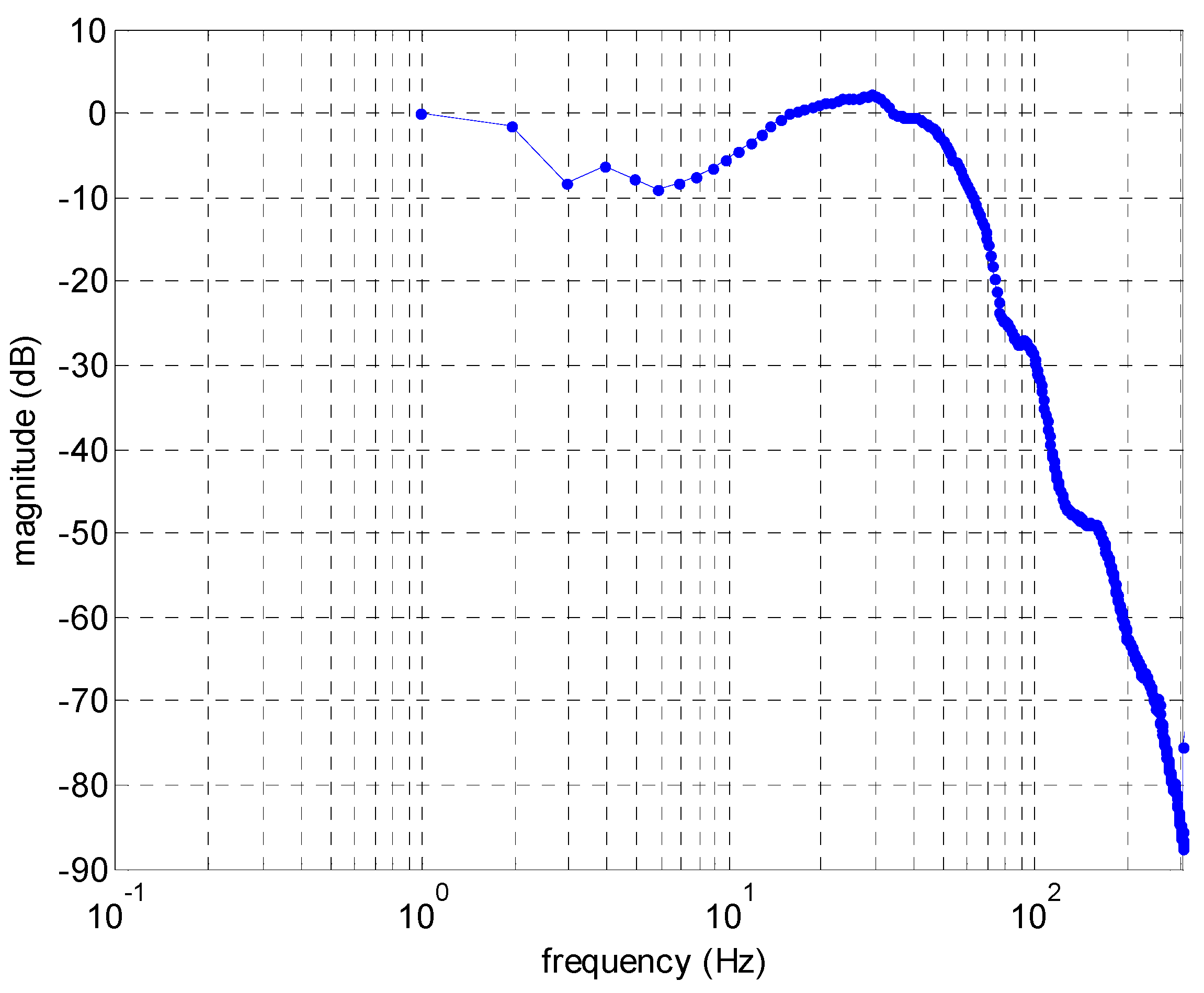
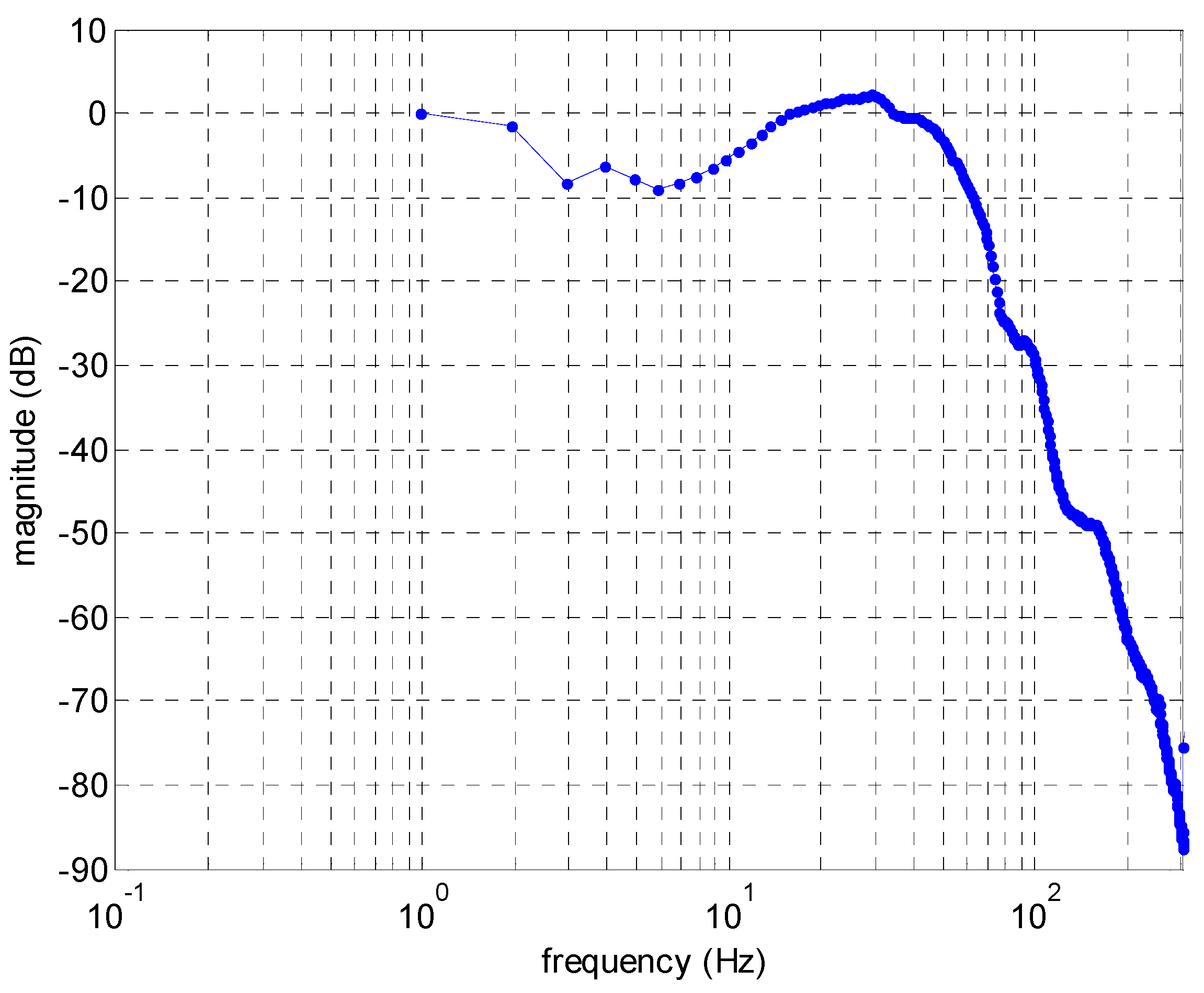
Figure 3. Triangular waves with 2 s of rising time and 2 s of falling time are used to drive the MSM actuator. Through the whole experiment, the highest voltage for the MSM actuator is 4 V, which equivalently means that the MSM actuator is driven by a 4 A current. To test hysteresis, the highest voltage of triangle wave was lowered 0.5 V each time until the highest voltage reaches 0.5 V. In the figure it is shown that the longest position is around 88 μm. Frequency response had also been tested as shown in
Figure 4. Its frequency response is up to more than 200 Hz, and the largest displacement sits at around 30 Hz.
5. Experiments
In this section, path tracking control of the MSM actuator is implemented. First, we test the performance of the forward controller, i.e., the hysteresis compensator. Then, path controllers, such as PID control and MFSMC, are also tested separately. Finally, the novel controller combined with the hysteresis compensator and path controller is implemented.
5.1. Hysteresis Compensator by the Inverse Preisach Model
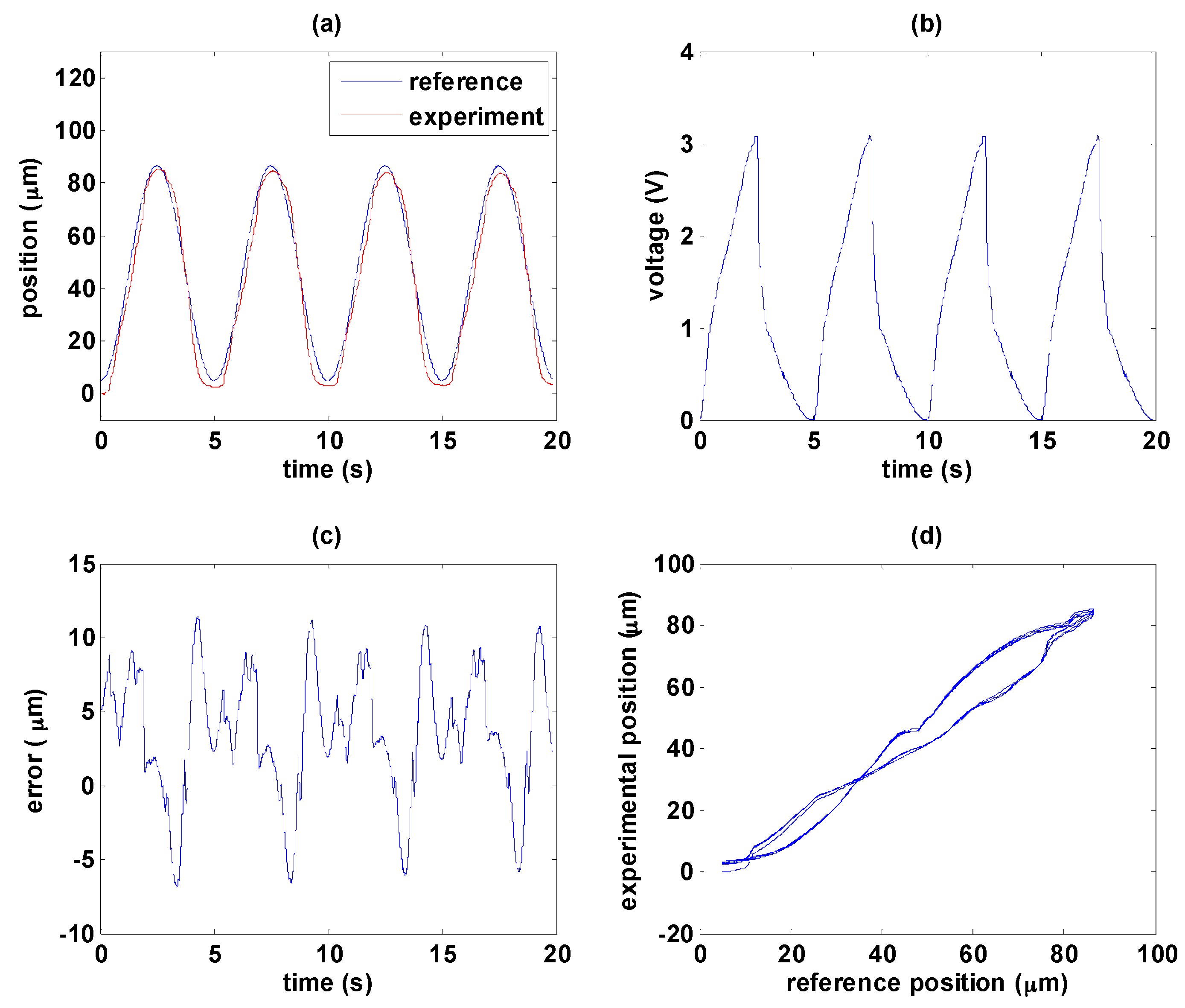
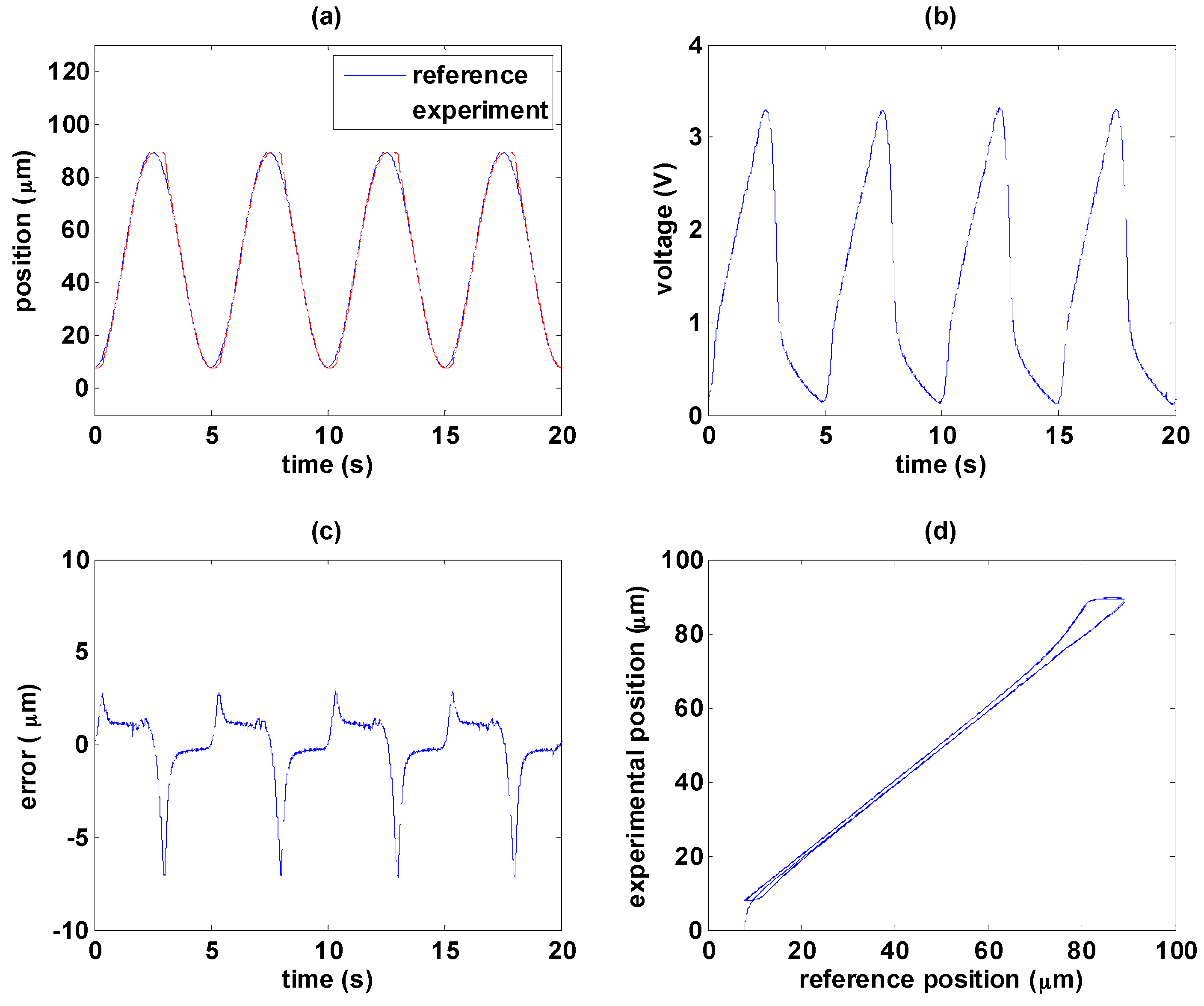
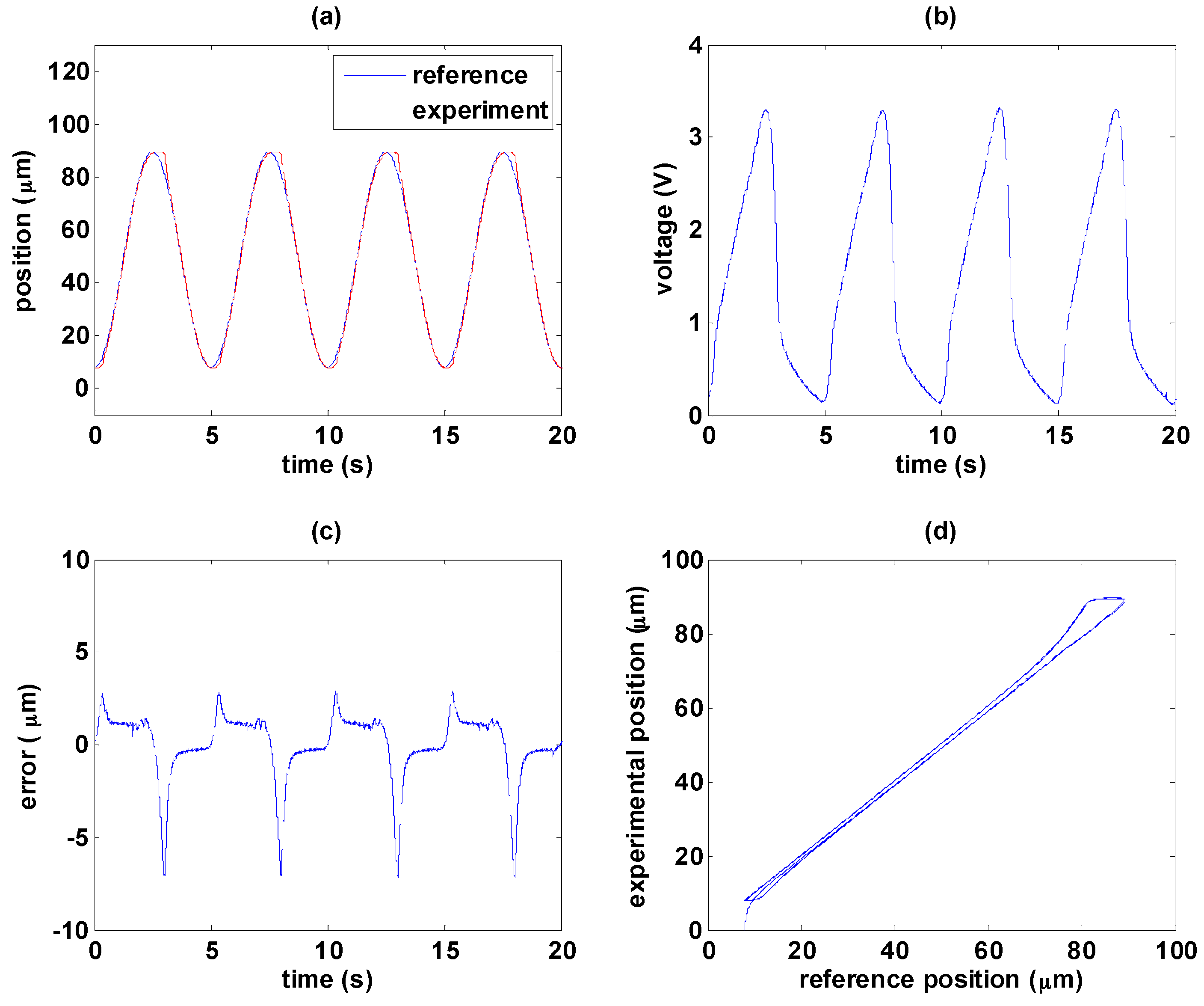
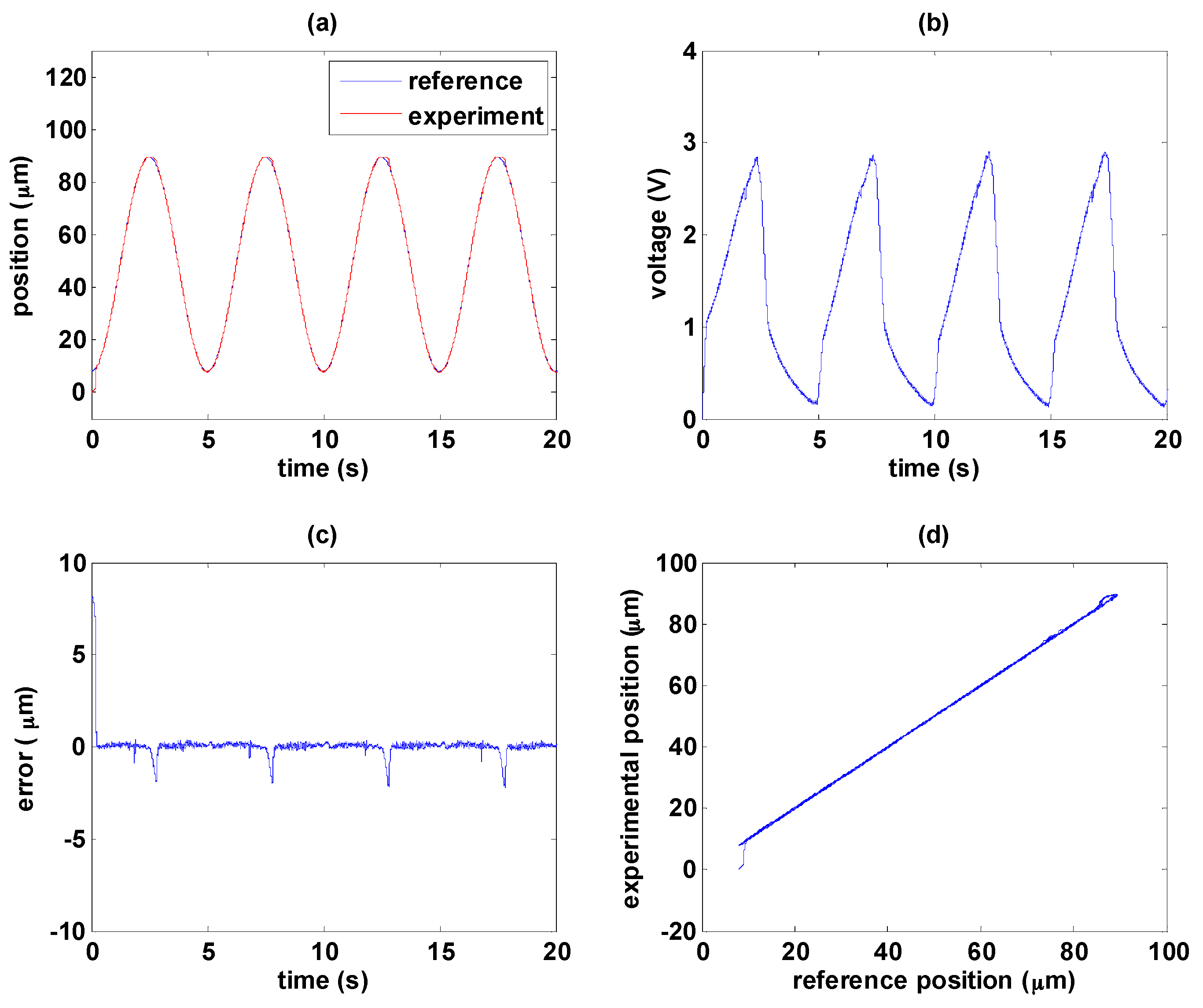
In the following experiments, the path tracking reference is a sinusoidal wave with amplitude of 81.5 µm and frequency of 0.2 Hz. As mentioned previously the MSM actuator is sensitive to disturbance so that the temperature is kept around 35 °C during the experiment. The experimental results with only the hysteresis compensator are shown in
Figure 11.
Figure 11a shows the path tracking control response. Nonlinearity of the MSM actuator can be observed clearly in
Figure 11b, and rapid falling of input signal is required to return the position back to its original state with good response. The control error, caused mainly by friction force and temperature variation, can be maintained within 10 µm as shown in
Figure 11c, especially by the change of moving direction. Besides, temperature changes during the experiment should be another reason causing fluctuations. The magnetic circuit is driven by electric current such that the MSM alloys tend to have temperature change. However, the hysteresis compensator can linearize the MSM actuator with limited effect, as shown in
Figure 11d.
5.2. Path Tracking Control without the Hysteresis Compensator
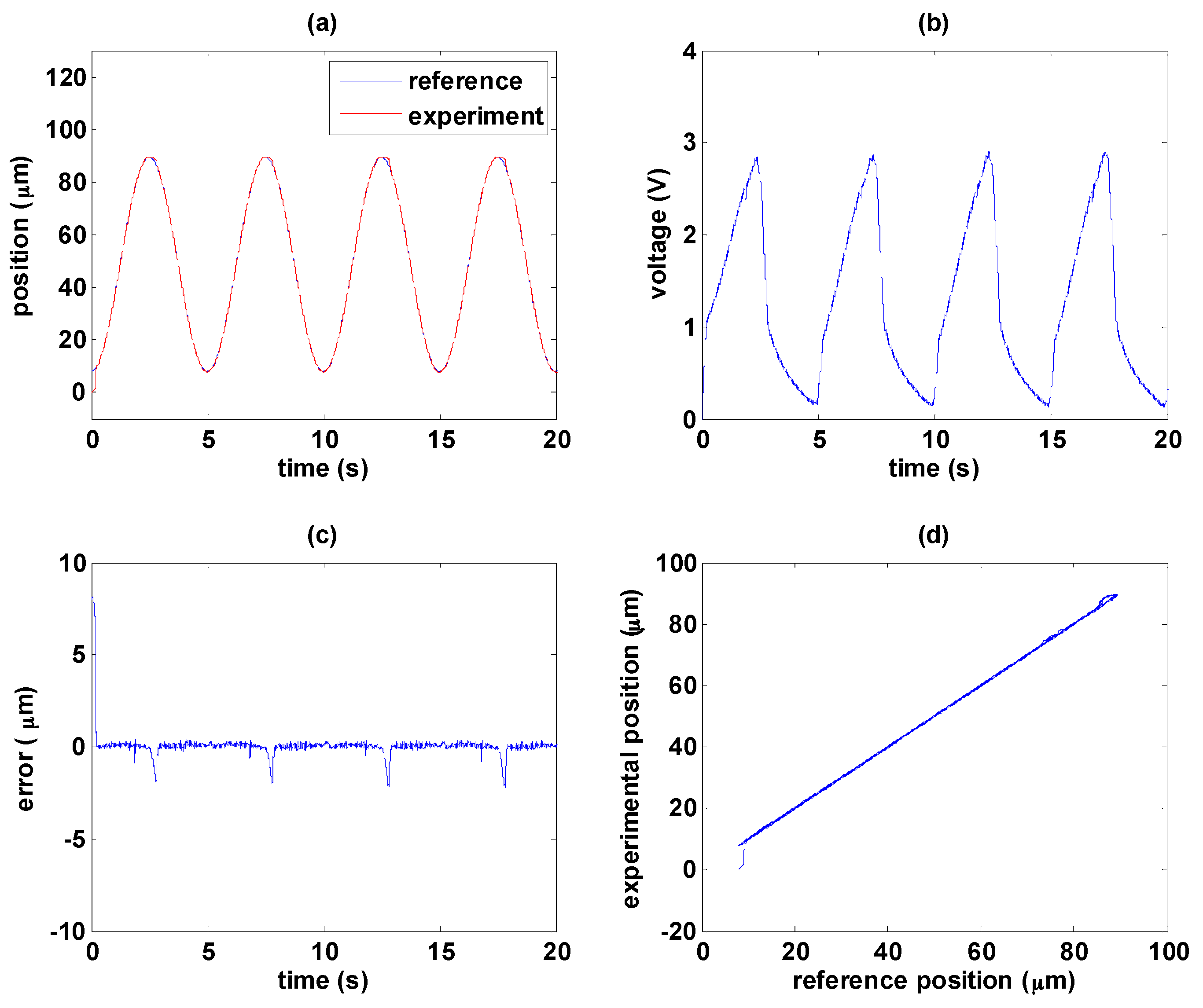
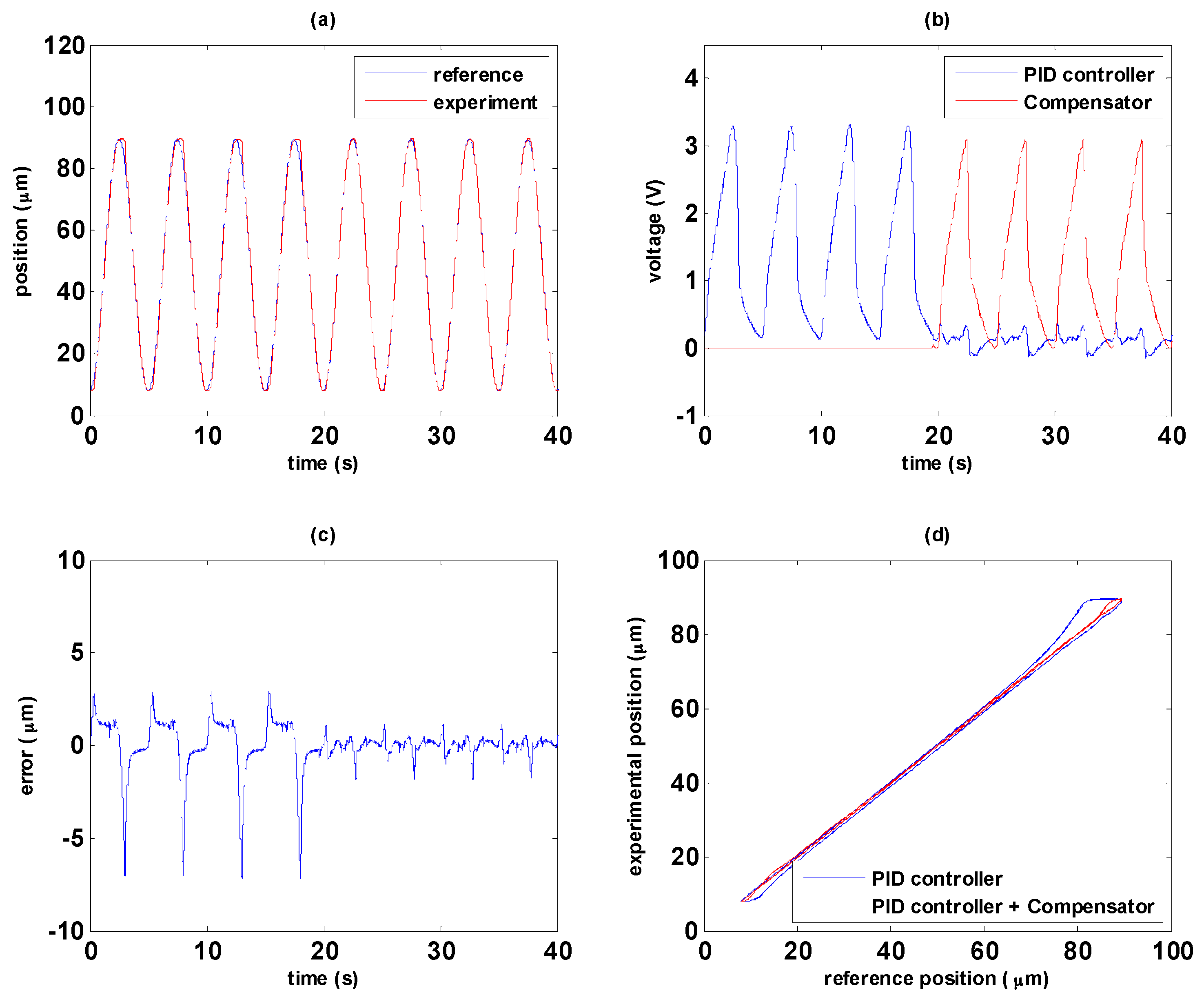
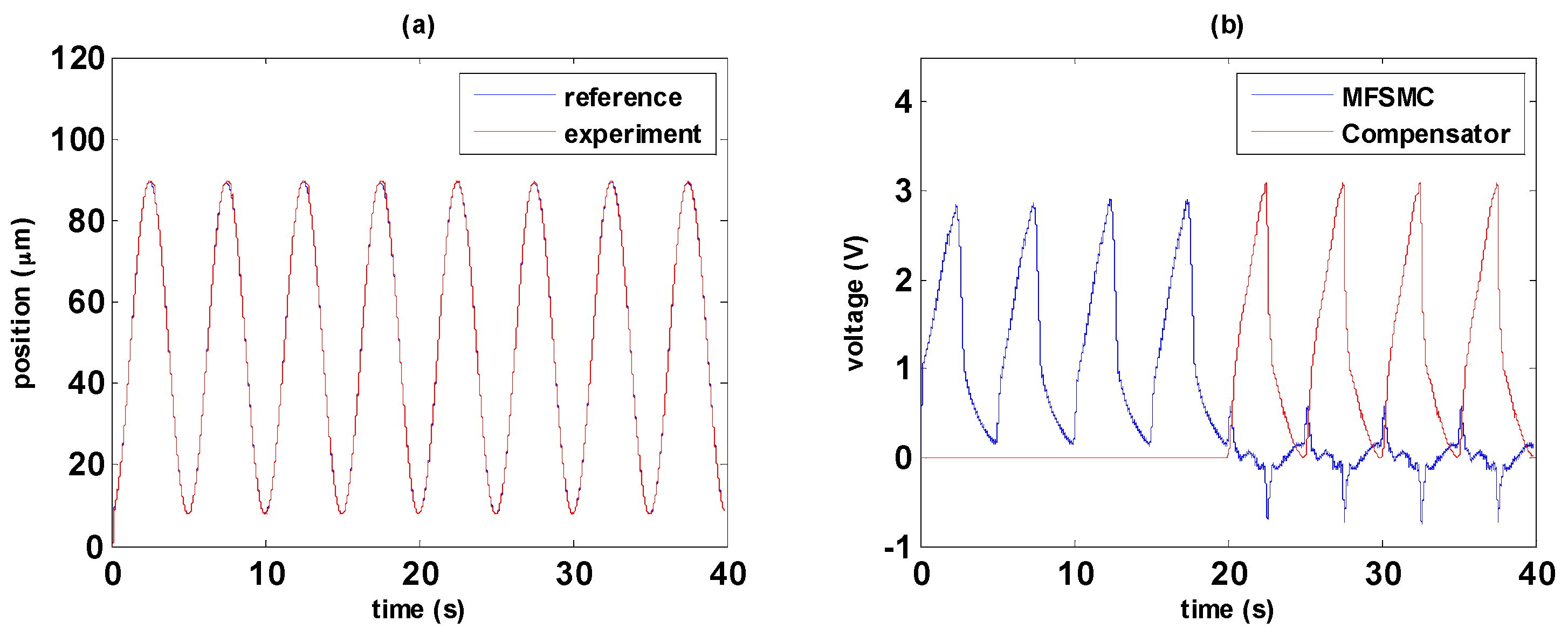
This section shows the experimental results of the path tracking control with two different path controllers, i.e., PID controller and MFSMC. The experimental results of PID controller and MFSMC are shown in
Figure 12 and
Figure 13, respectively. Friction during direction change causes the maximum error, especially in the transition from elongation to contraction. As the MSM actuator has serious hysteresis, the PID controller cannot tackle this nonlinearity well. It can be noticed in
Figure 12a that hysteresis results in delay of the PID controller during the transition of the MSM actuator from elongation to contraction which is due to the falling rates of input signals are not fast enough in PID controller. MFSMC has better performance at the transition period as shown in
Figure 13a, which is attributed to the fast switching in the sliding surface of MFSMC. The maximum error at the transition is around 2 µm, and during the period of elongation and contraction, the error can be maintained under 500 nm as shown in
Figure 13c.
In comparison with the maximum error by using PID controller of about 7
in
Figure 12c, it is evident that the MFSMC has better tracking performance than the PID control. Besides, compared the experimental results with that of the hysteresis compensator in
Section 5.1, the hysteresis compensator serves as forward control so that it cannot receive the errors to modify the tracking performance. Therefore, the tracking accuracy of the hysteresis compensator in
Section 5.1 is limited.
5.3. Novel Controller by Combination of Path Controller with the Hysteresis Compensator
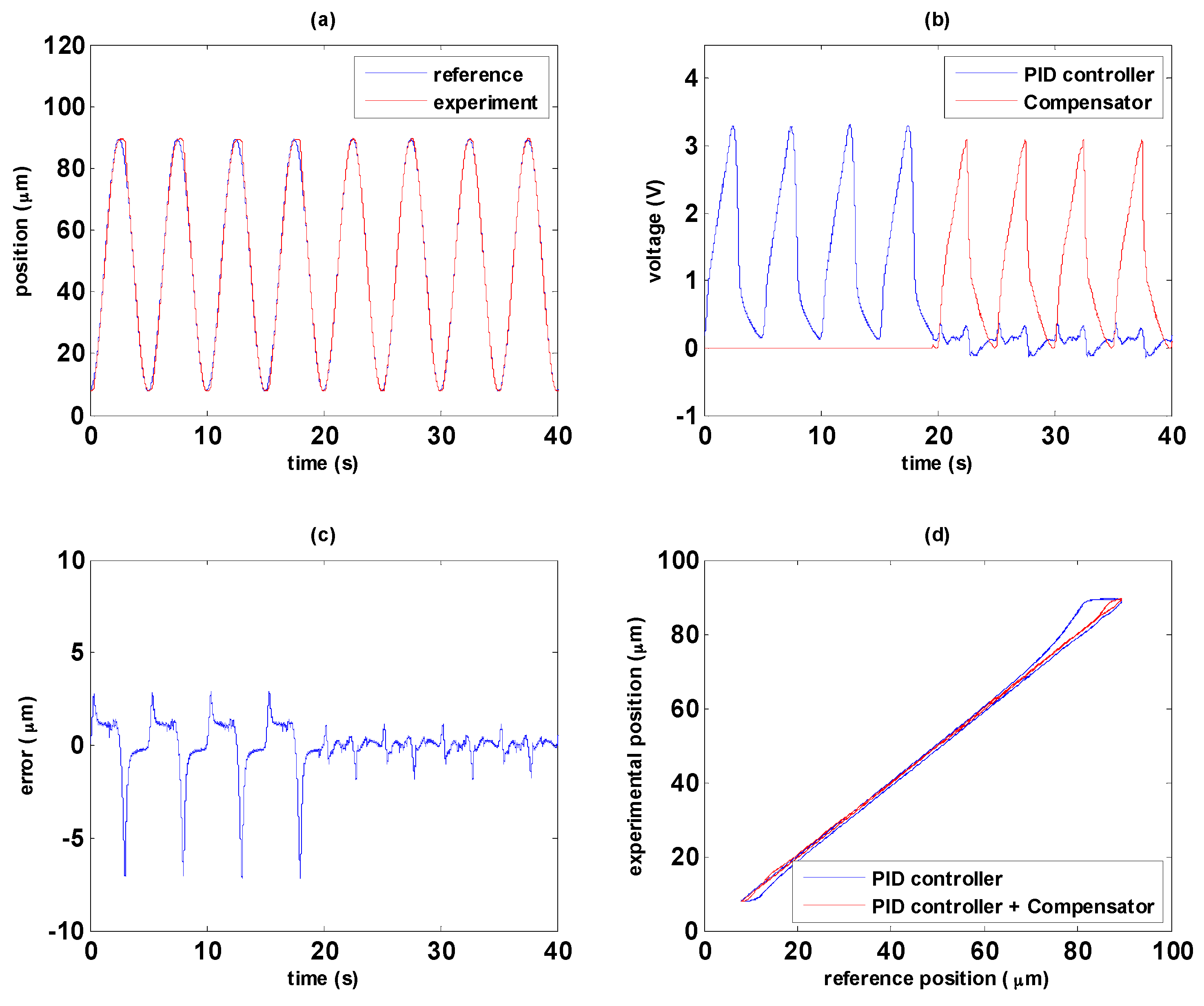
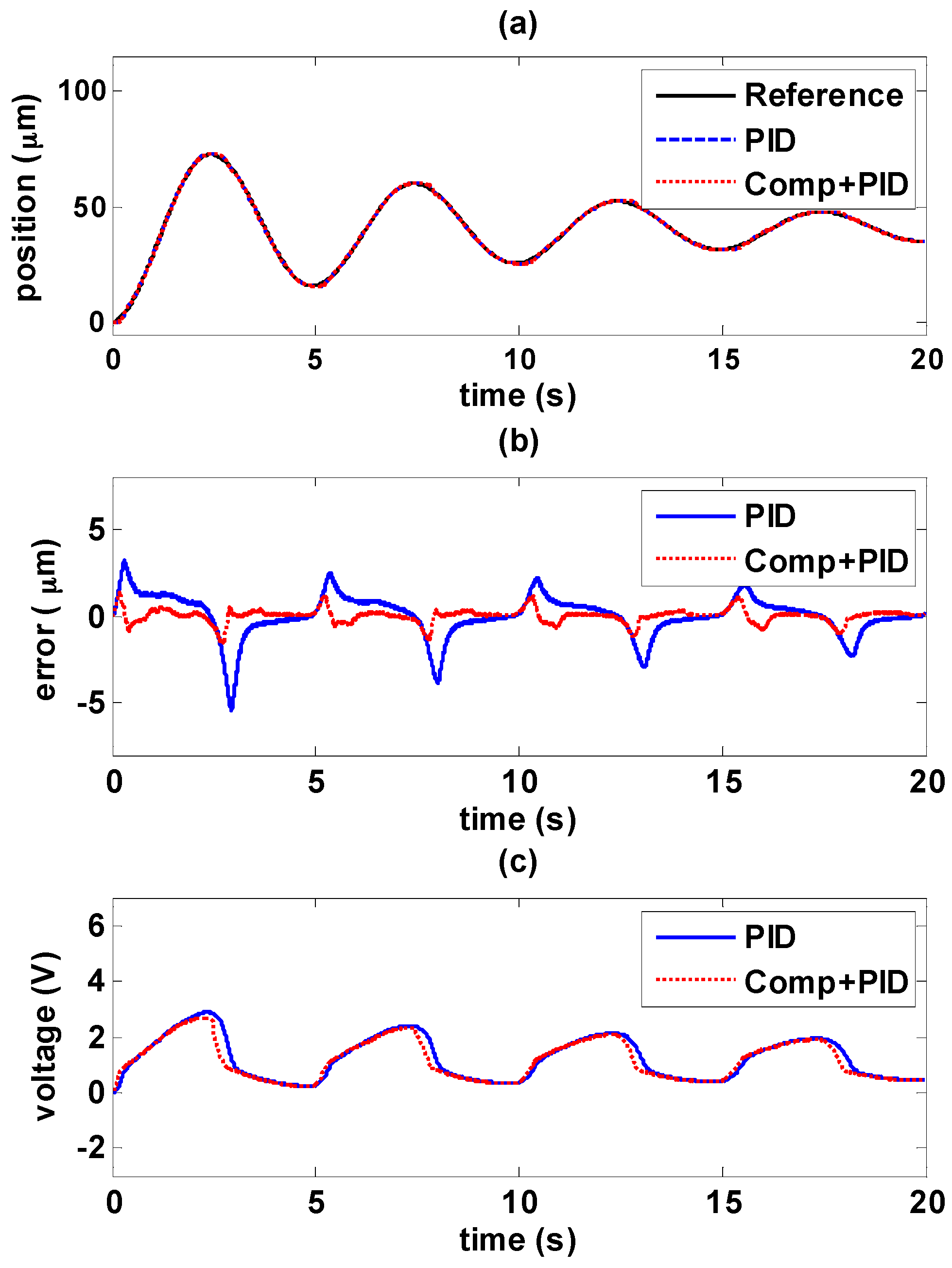
In this section, control strategy experiments are performed by combining the hysteresis compensator and path controller. In order to analyze the path tracking results in an experiment, path controller is applied first, and then the hysteresis compensator is added, i.e., path controller with the hysteresis compensator, at the time point of 20 s. The experimental results of PID path controller with the hysteresis compensator are shown in
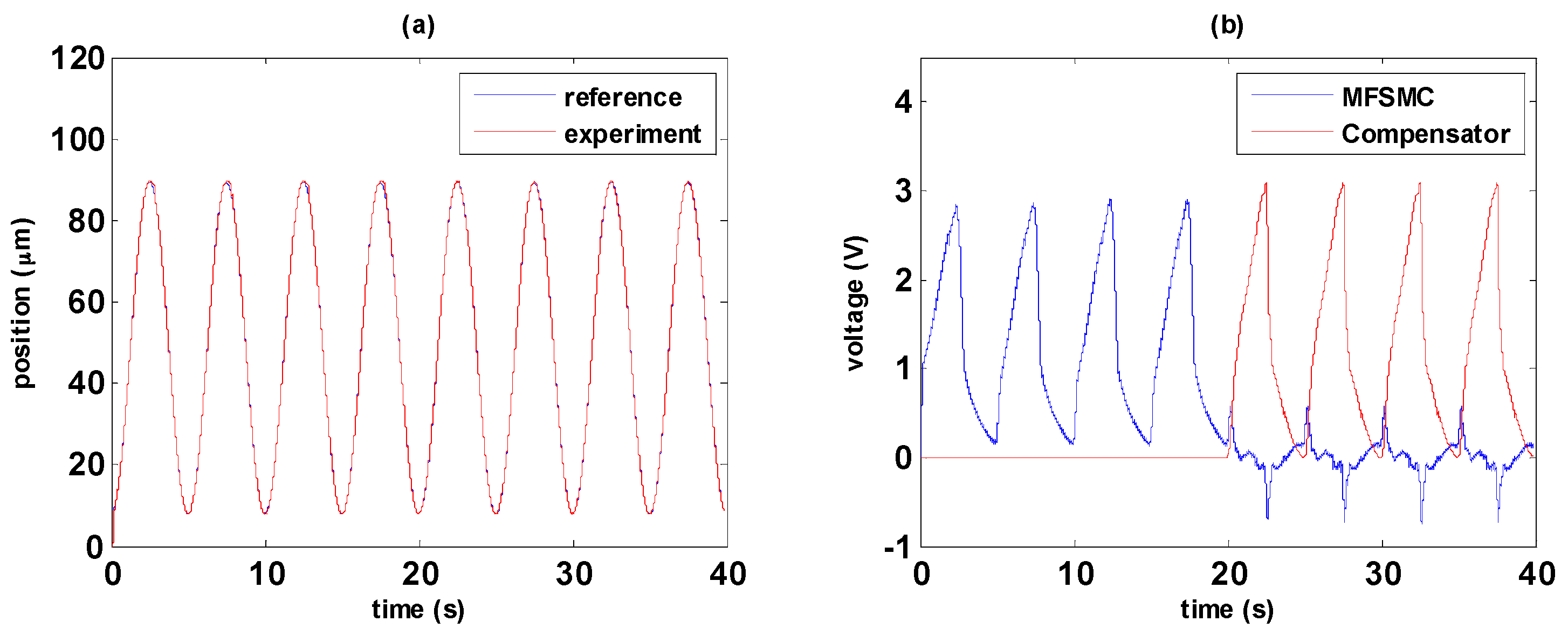
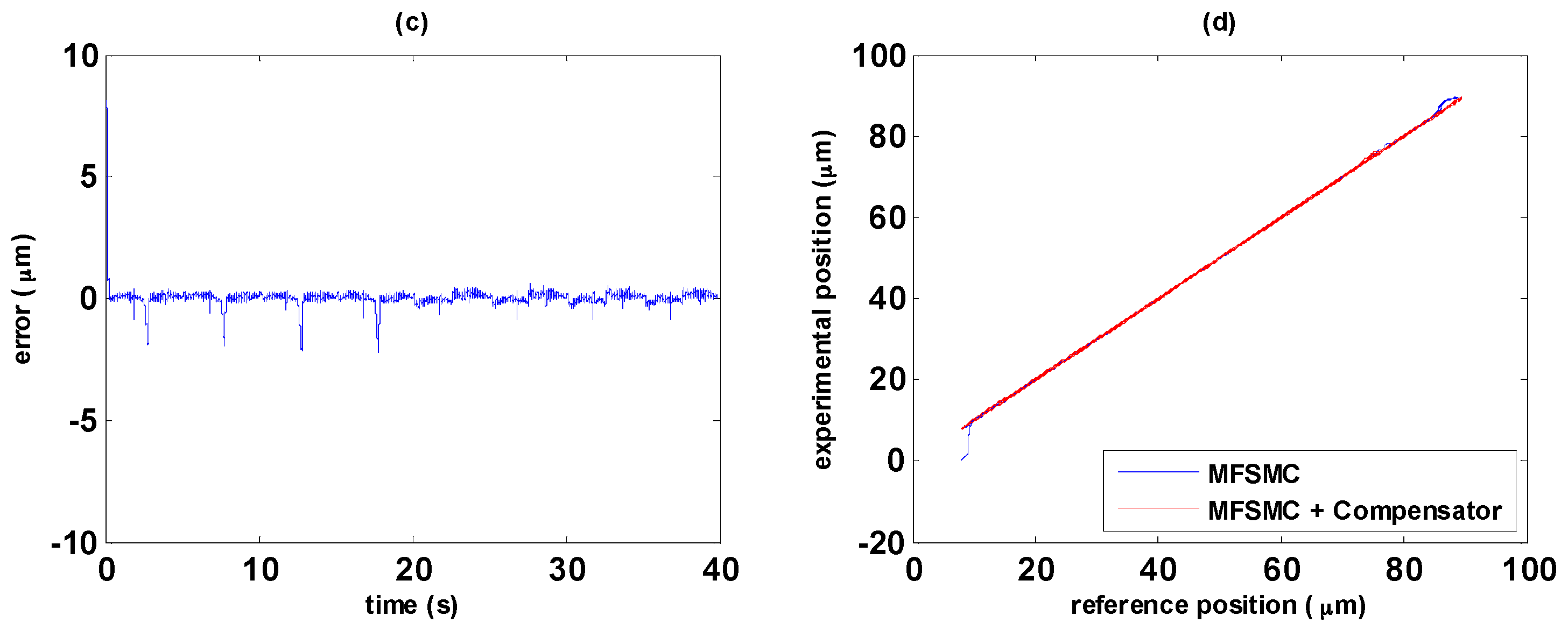
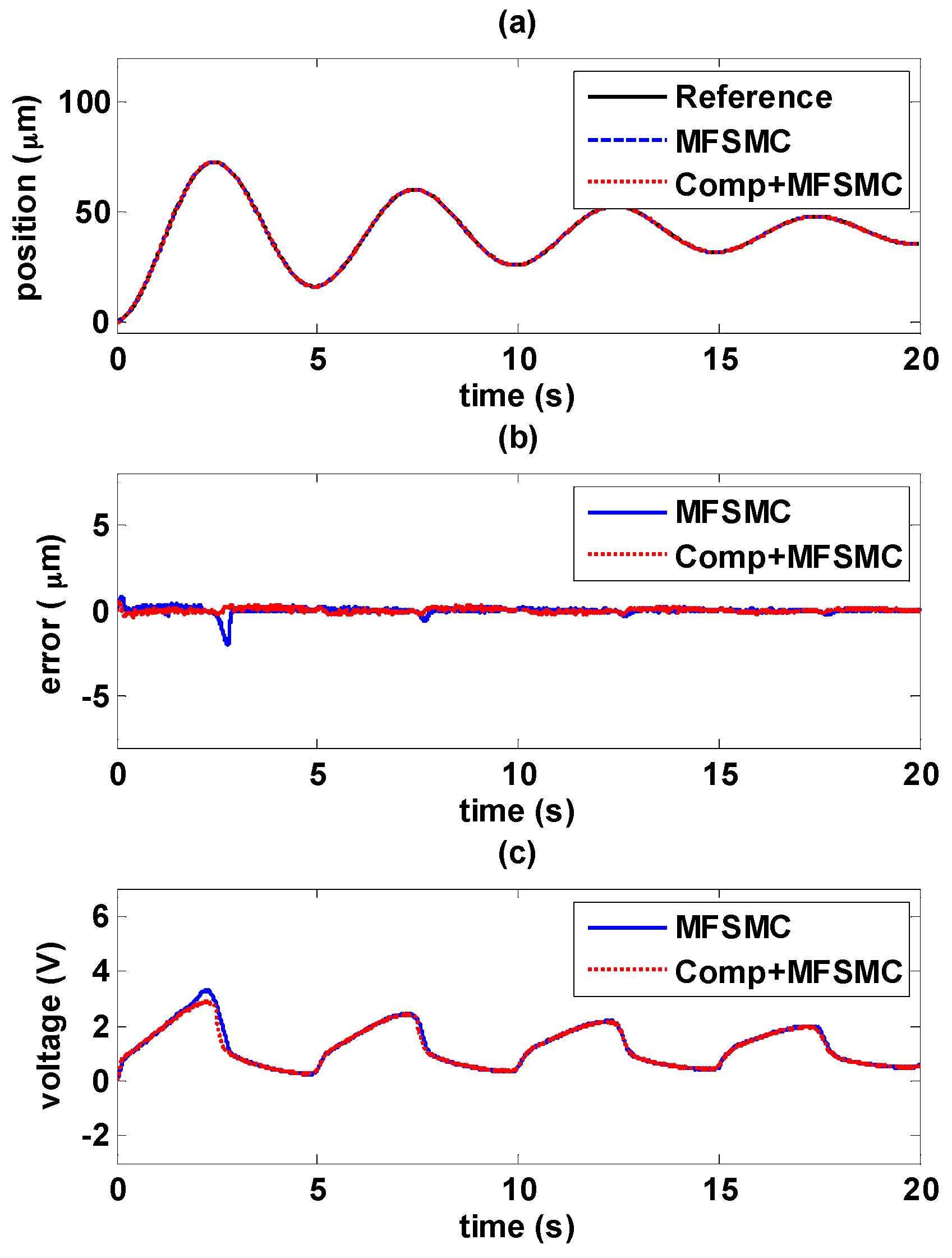
Figure 14; the experimental results of MFSMC path controller with the hysteresis compensator are shown in
Figure 15.
The path tracking responses are shown in
Figure 14a and
Figure 15a. In the first 20 s, only path controller works for tracking control, and the hysteresis compensator is added after 20 s for achieving the combination of path control and the hysteresis compensator. The hysteresis compensator becomes the major control signals, and path controllers turn out to be the modifying signal for correcting control signals as shown in
Figure 14b and
Figure 15b. In both experimental results, it can be seen that path controller combining with the hysteresis compensator provides better control performance. In
Figure 14c, it can be seen that total errors can be reduced from 7 µm to 2 µm through the PID path controller with the hysteresis compensator. Furthermore, the total errors can be reduced from 2 µm to 500 nm through the MFSMC path controller with the hysteresis compensator as shown in
Figure 15c. The linear relationship between the reference and experimental position can be improved obviously as shown in
Figure 14d and
Figure 15d by the combination of path controller with the hysteresis compensator.
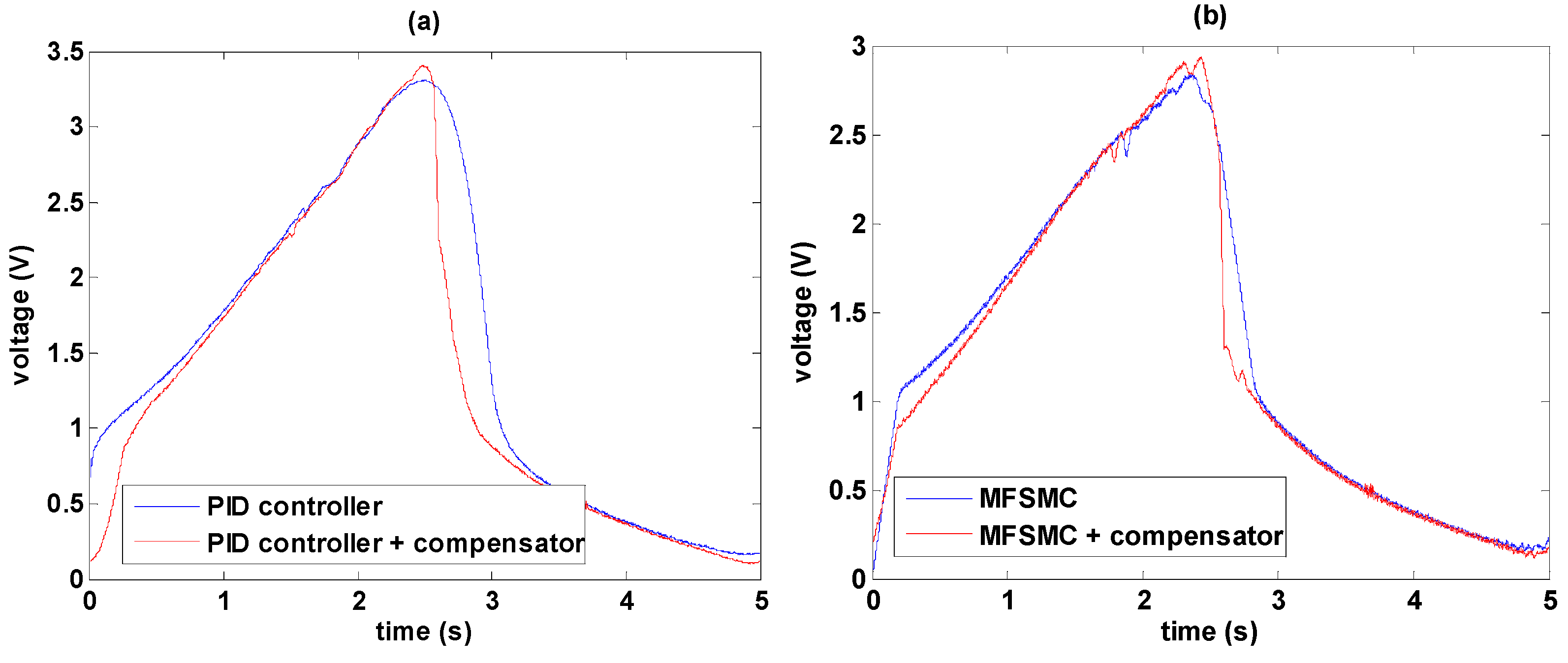
Figure 16 shows the comparisons of control signals with and without the hysteresis compensator. According to
Figure 14b, the control signals from 0 to 5 s as PID control and that from 20 to 25 s as PID path control with the hysteresis compensator are selected for comparison and shown in
Figure 16a. Similarly, consistent with
Figure 15b the control signals from 0 to 5 s as MFSMC path control and that from 20 to 25 s as MFSMC path control with the hysteresis compensator are compared in
Figure 16b.
It is obvious that the control signal is especially modified during the changing of direction. Due to the friction, only using path controller cannot adjust the output fast enough so as to cause delay and errors. By combining path controller with the hysteresis compensator, it can be noticed that the signals has fast response to overcome the delay. Moreover, MFSMC with the hysteresis compensator can perform faster response than PID controller with the hysteresis compensator.
5.4. Novel Controller in Different Trajectories Control
We have demonstrated the tracking performance with our novel controller. The hysteresis compensator is provided the main input signal for path tracking, and it is able to give the proper response as path changing. In addition, the path controller is able to enhance tracking accuracy. More experiments to verify the performance of the novel controller follow.
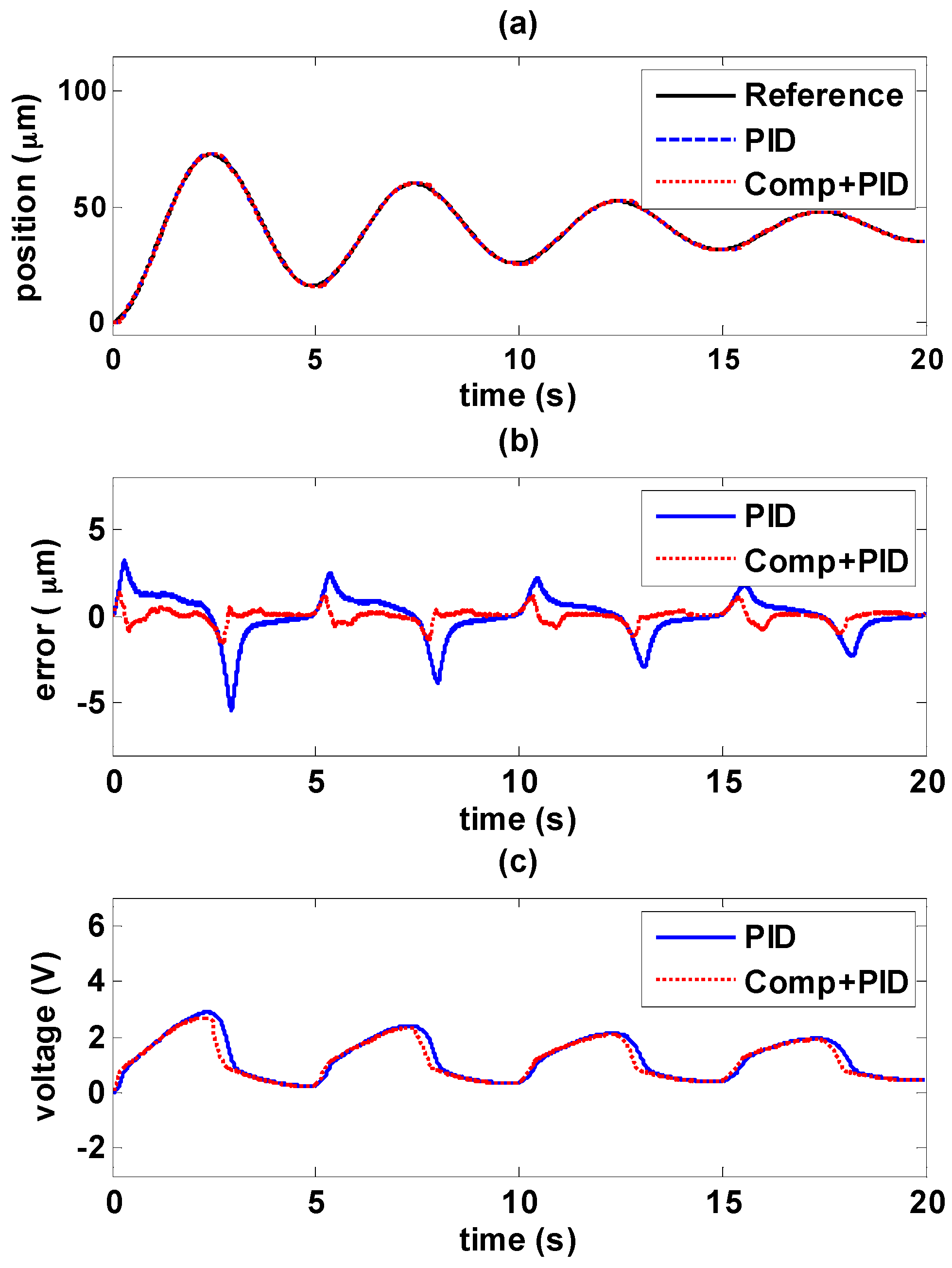
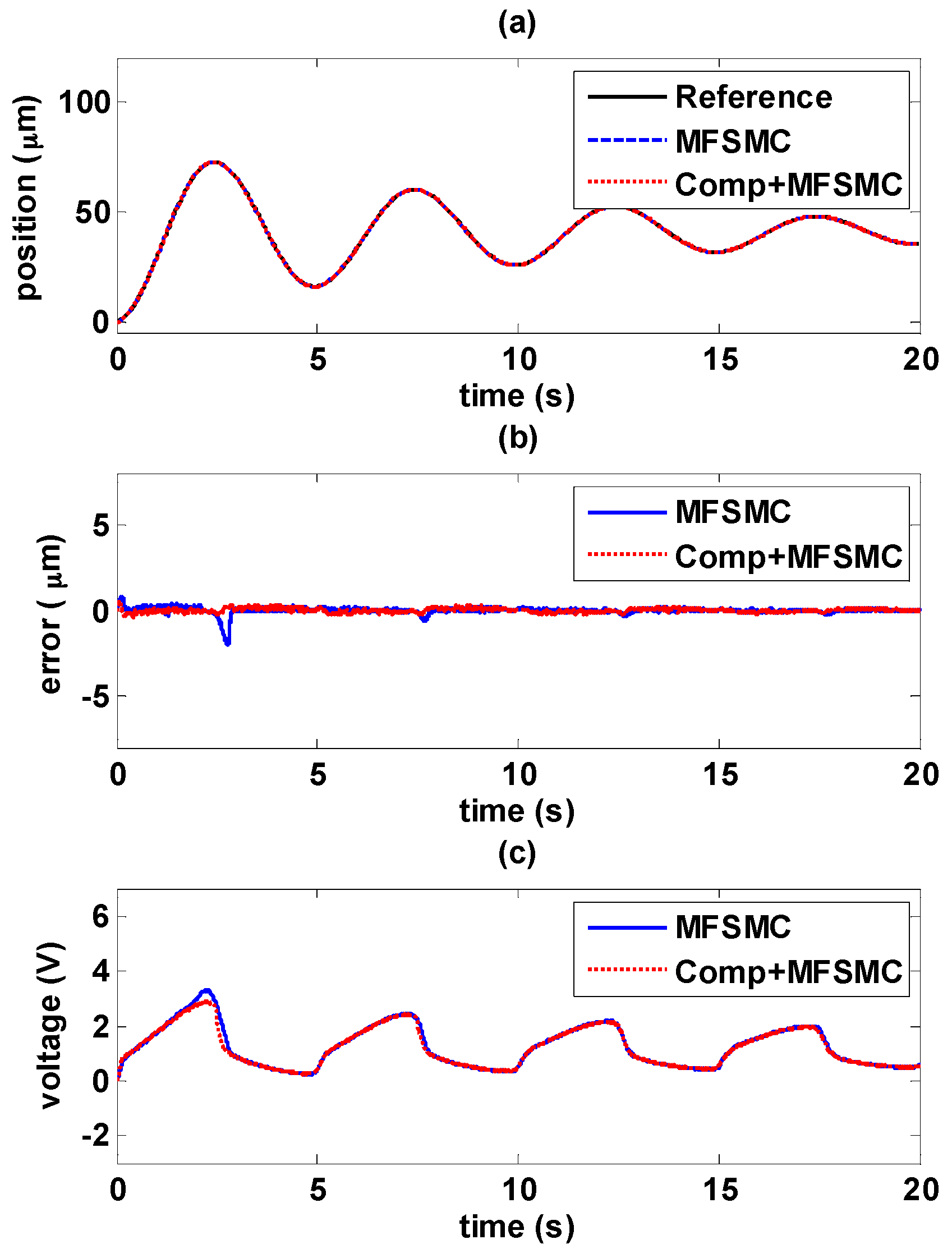
5.4.1. Decaying Sinusoidal Trajectory Control
The experiments of decaying sinusoidal wave with 0.2 Hz are shown in
Figure 17 and
Figure 18, and the tracking reference is set as
. It is shown that the tracking performance by using the novel controller is better than by only using path controller in both experiments. The maximum error occurs at the changing of direction of maximum amplitude. As the amplitude decays during the time, the error is also reduced. In
Figure 17b, it is shown the maximum error is 5.4 μm with PID controller, and the maximum error is reduced to 1.36 μm by adding the hysteresis compensator. Likewise, in
Figure 18b, the maximum error is 1.96 μm with MFSMC, and the total errors can be kept small enough within 450 nm. It can be seen how the input signals is modified by adding the hysteresis compensator.
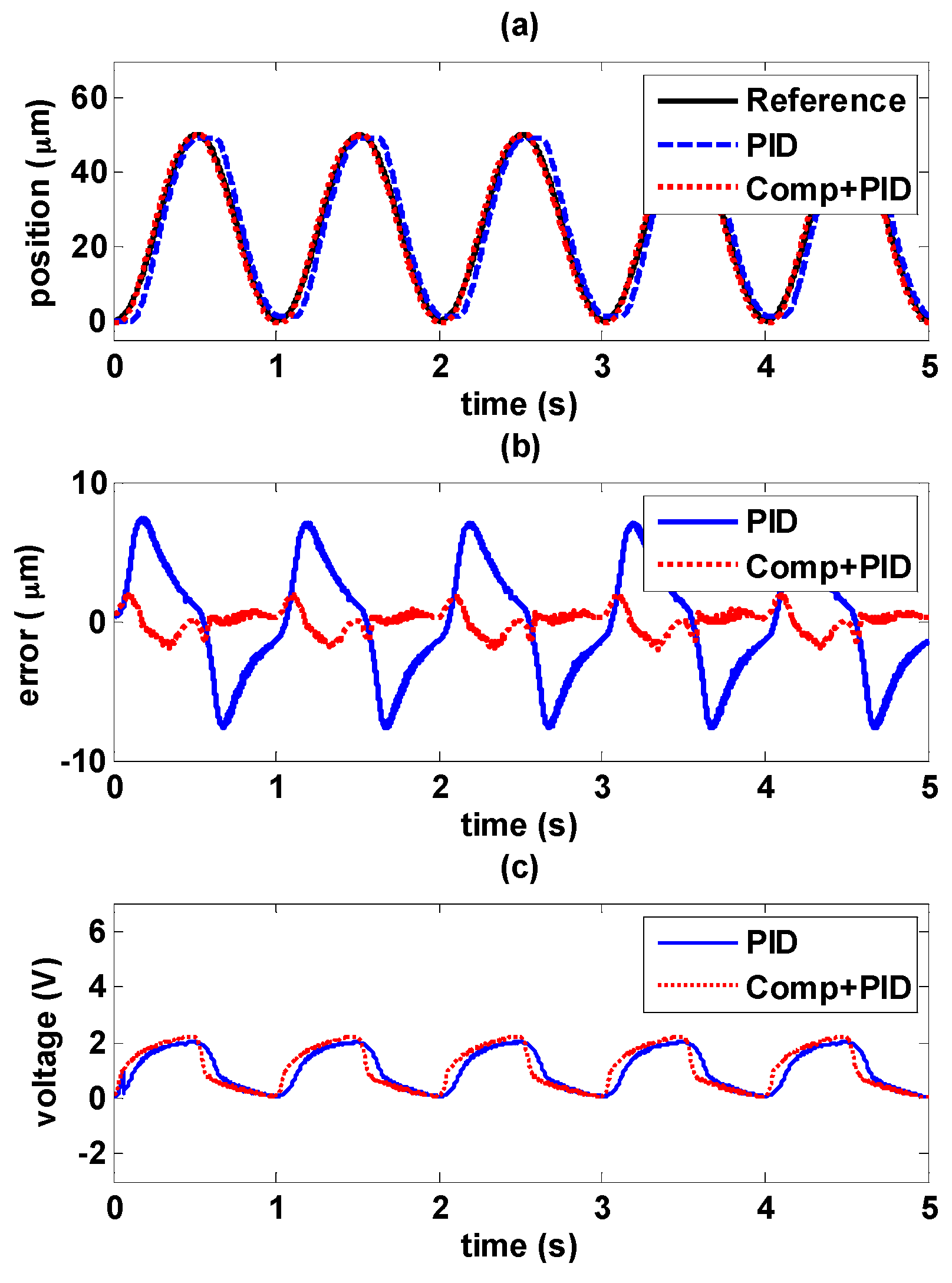
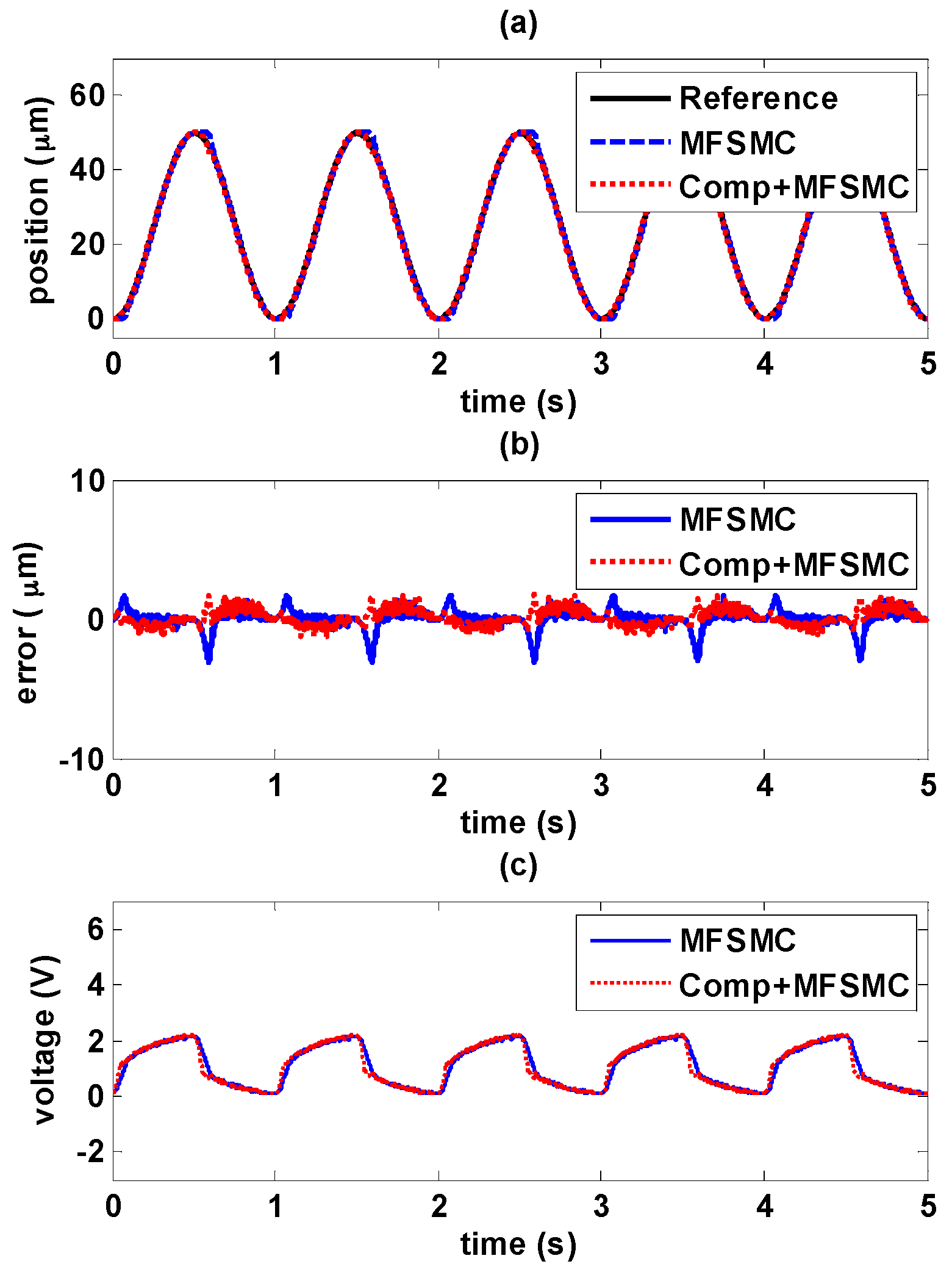
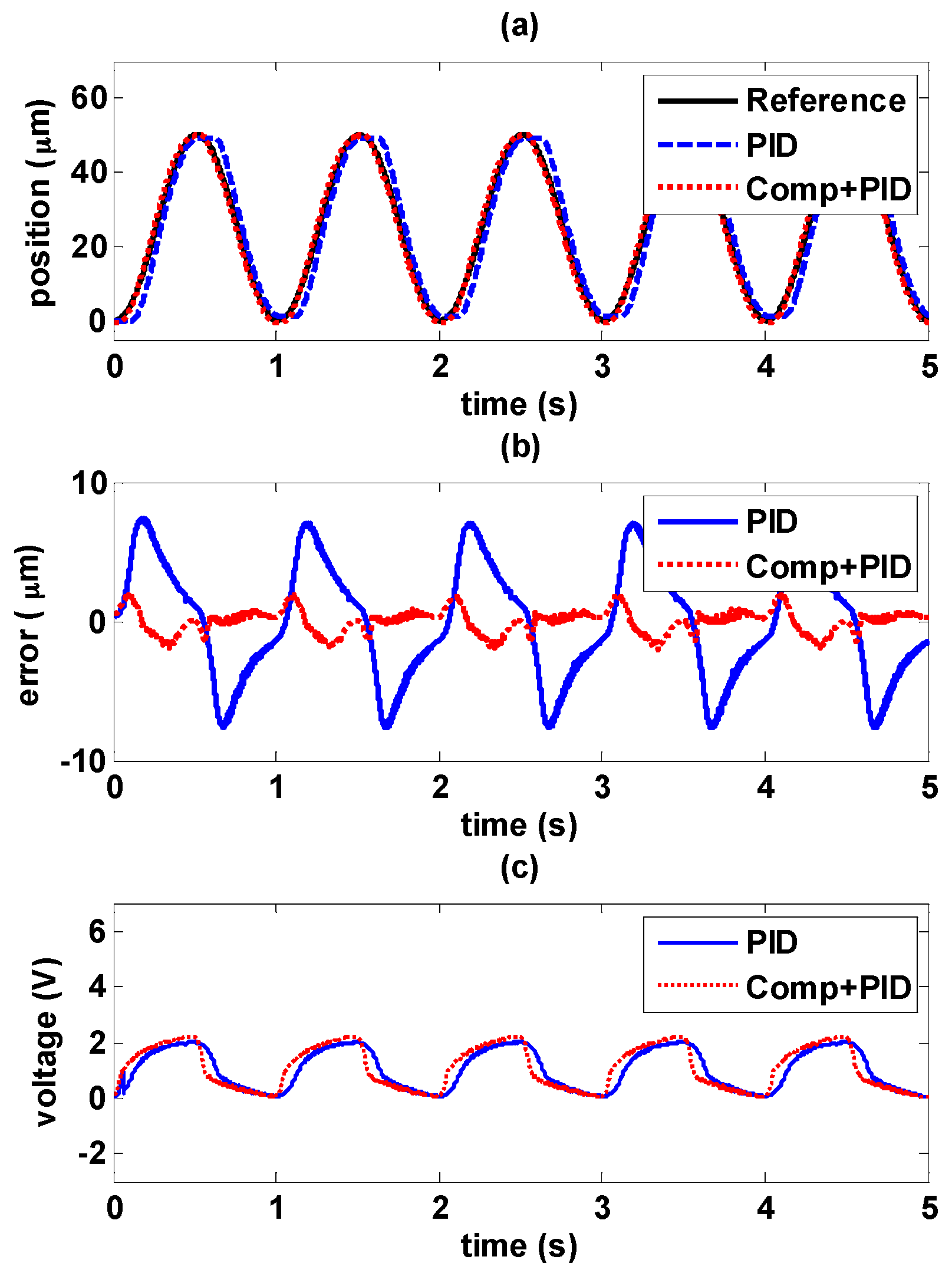
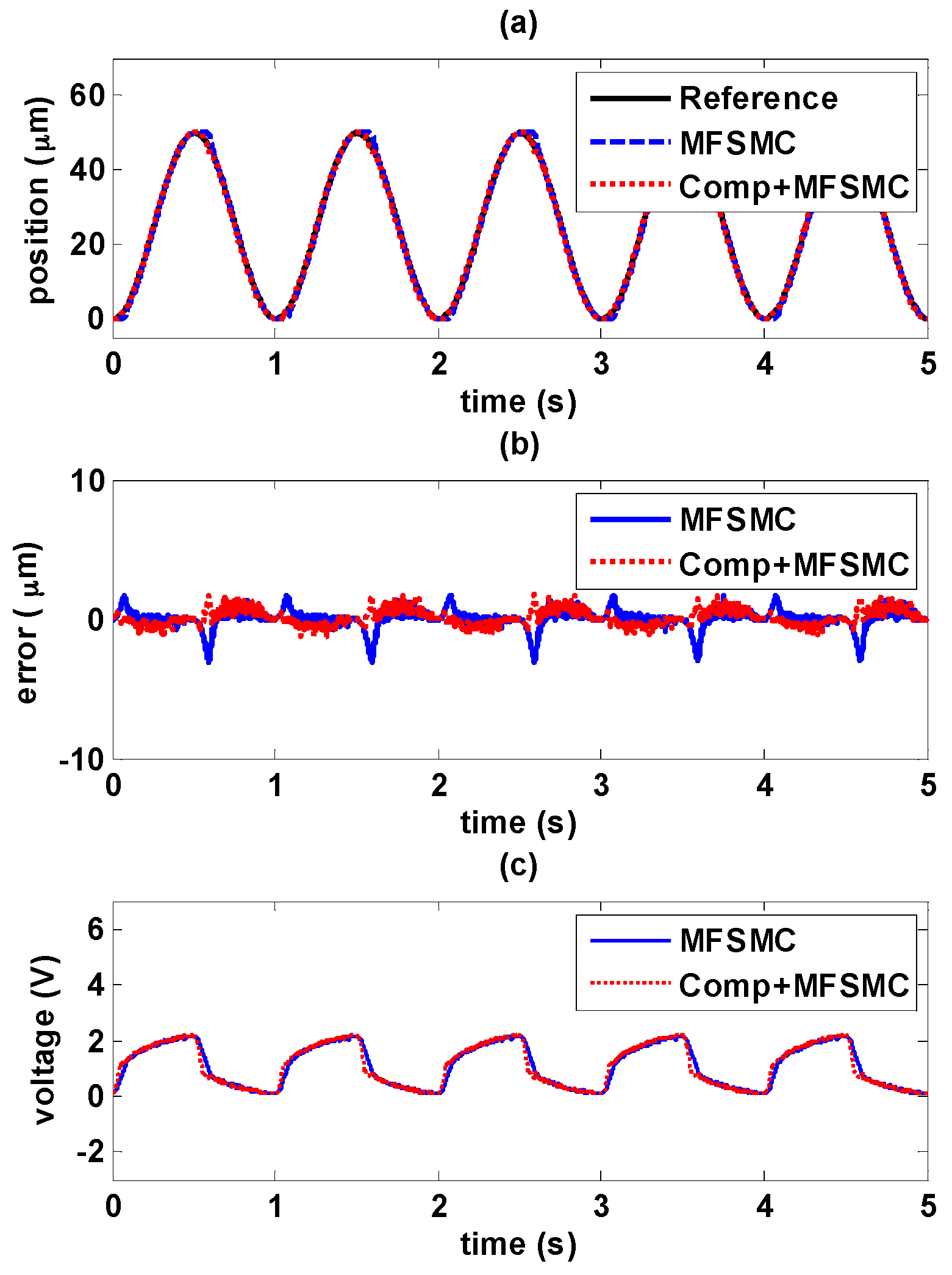
5.4.2. Sinusoidal Trajectory Control in Higher Frequency
Sinusoidal wave with the amplitude of 50 μm and higher frequency at 1 Hz is tested and shown in
Figure 19 and
Figure 20.
It is evident that higher frequency signals have larger errors. In
Figure 19b, the maximum error increases to 7.6 μm with PID controller, and it can be seen that the controller response is much delayed with higher frequency signals as shown in
Figure 19c. Adding the hysteresis compensator can improve the tracking performance, the maximum error is able to be reduced to less than 2 μm. Similarly as shown in
Figure 20b, 3 μm is the maximum error with MFSMC, and it can be reduced further to less than 1.7 μm by adding the hysteresis compensator.
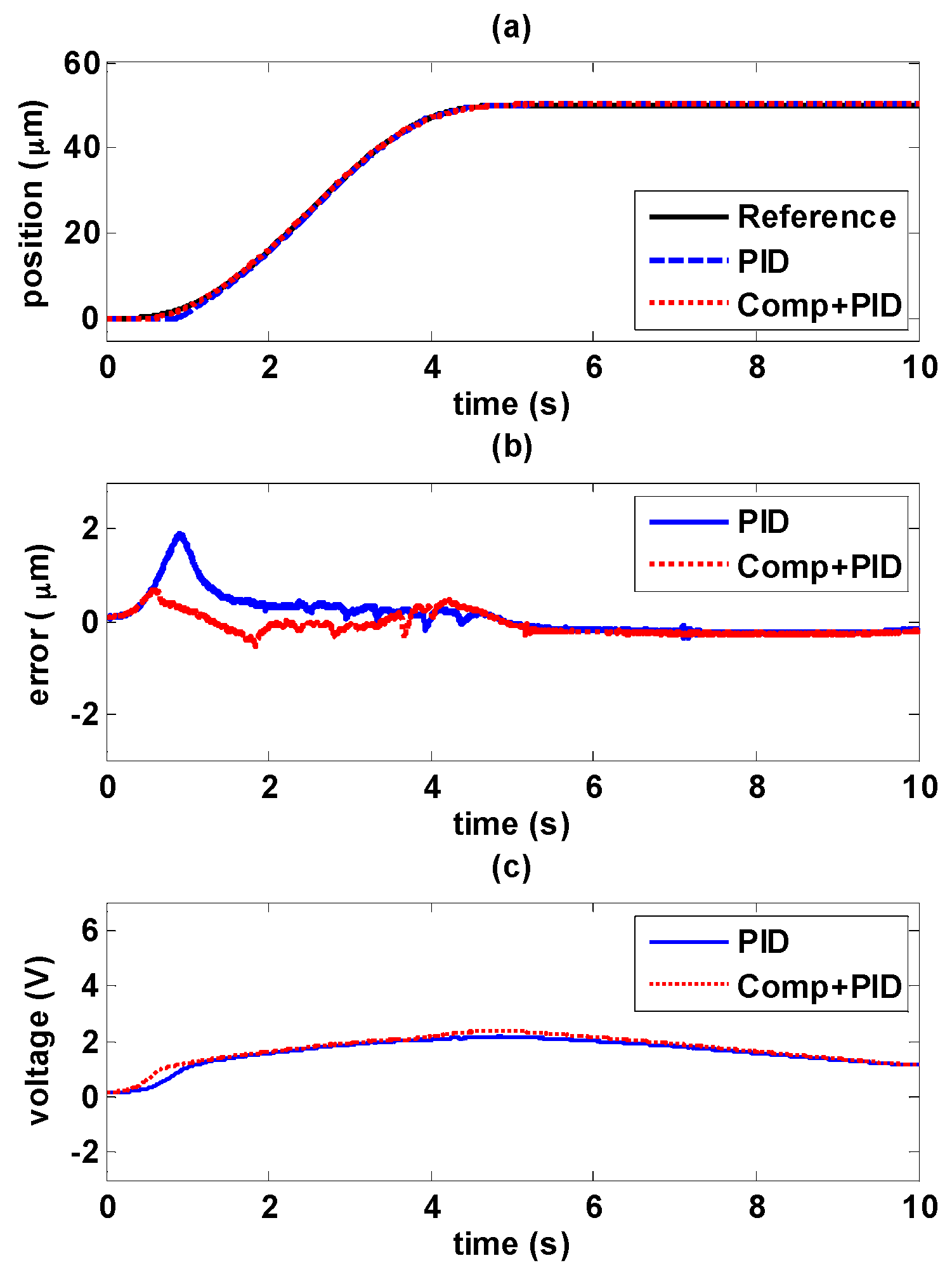
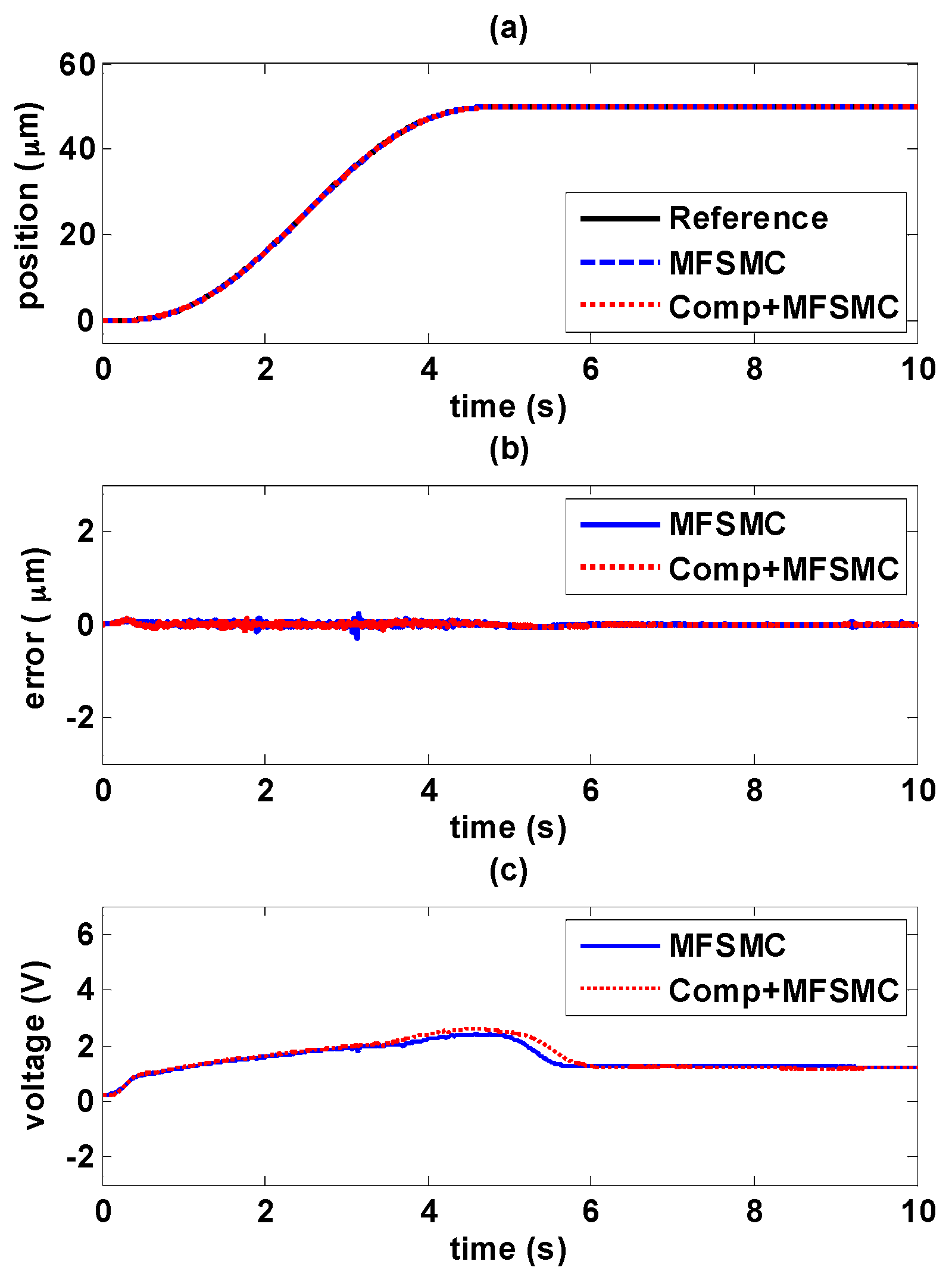
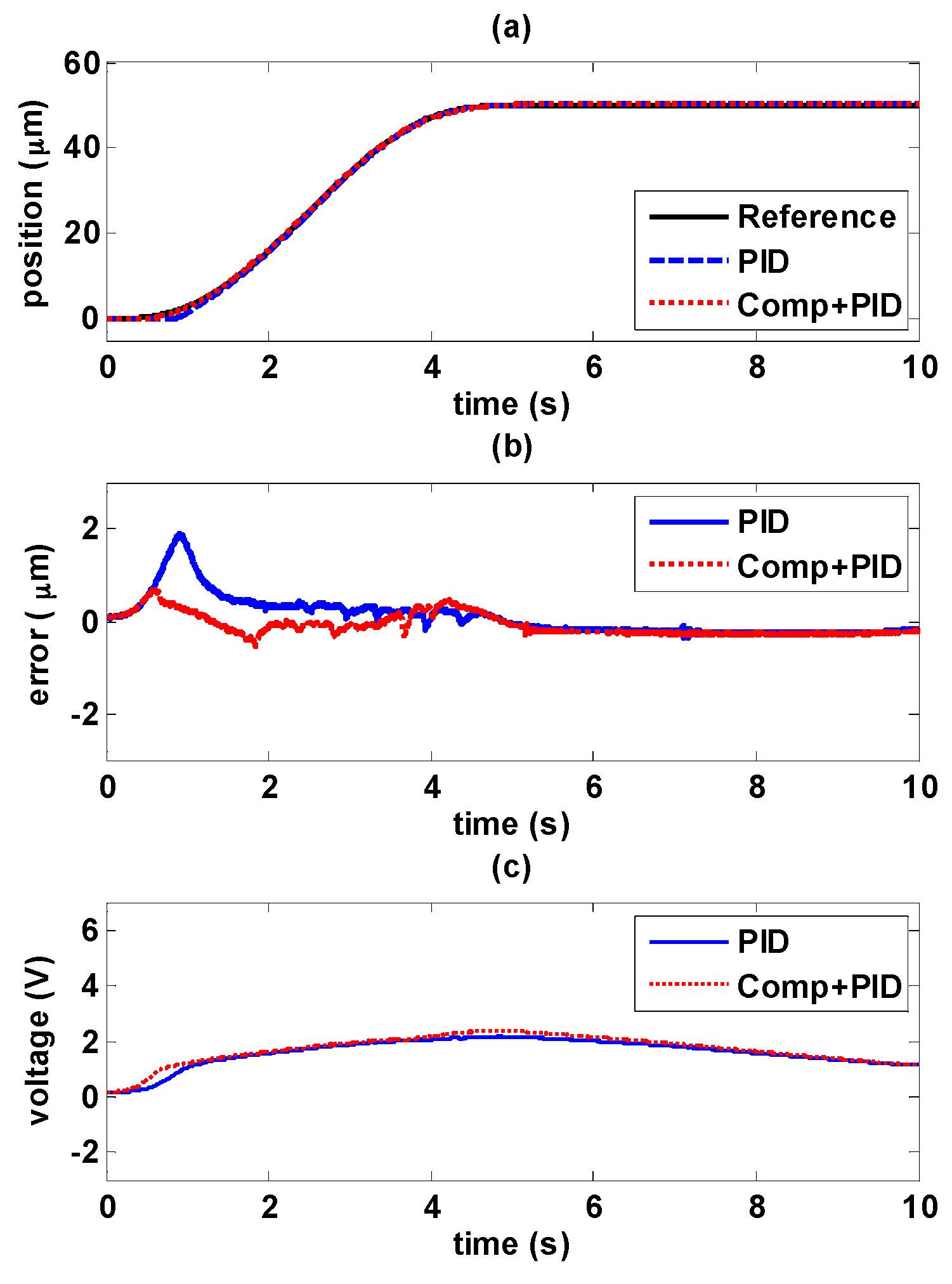
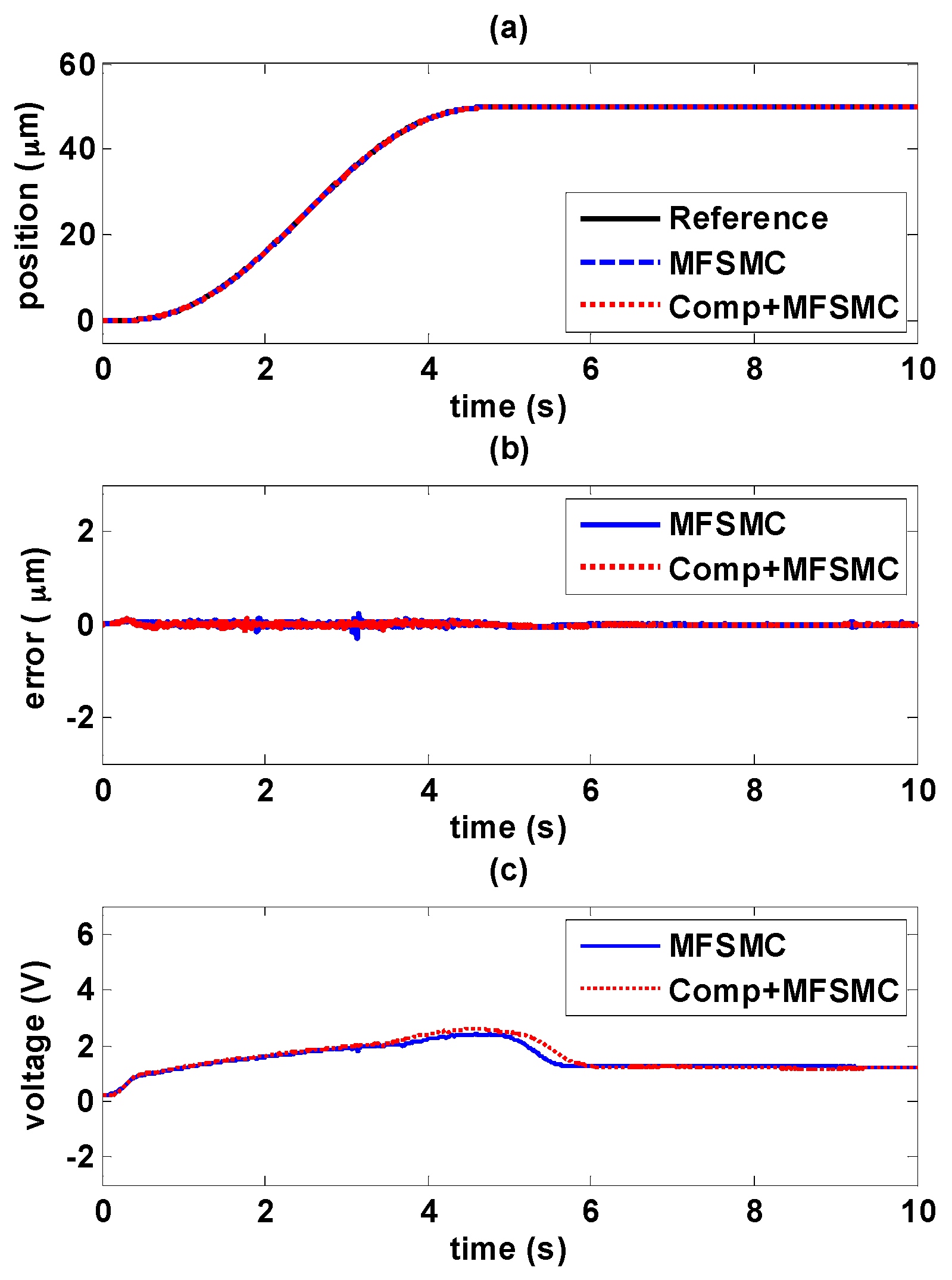
5.4.3. 5th Order Trajectory Control in Higher Frequency
In these experiments, 5th order trajectory is used as a smooth tracking path for the MSM actuator. 5th order trajectory has continuous function in position, velocity and acceleration. Therefore, it is evident that the errors are small in
Figure 21 and
Figure 22. In
Figure 21b, the maximum error is 1.87 μm, which is controlled by PID controller solely, and it has large friction because the speed of the MSM actuator is slow. Besides, maximum error can be reduced to 660 nm by adding the hysteresis compensator, and the steady state error is 280 nm. For MFSMC, the error is much less than PID controller with the hysteresis compensator. It is able to be reduced to less than 280 nm for maximum error, and the steady state error is able to reach to 20 nm, which is the resolution of position sensor. Adding the hysteresis compensator for MFSMC, 134 nm is the maximum error, and the steady state error is able to be kept as small as 20 nm.
6. Conclusions
The MSM actuator inherits the advantageous properties of huge strain and fast response like MSM alloys, however, they also exhibit a hysteresis phenomenon. This paper aims to develop a novel controller by combining a path controller with a hysteresis compensator for path tracking control of MSM actuators.
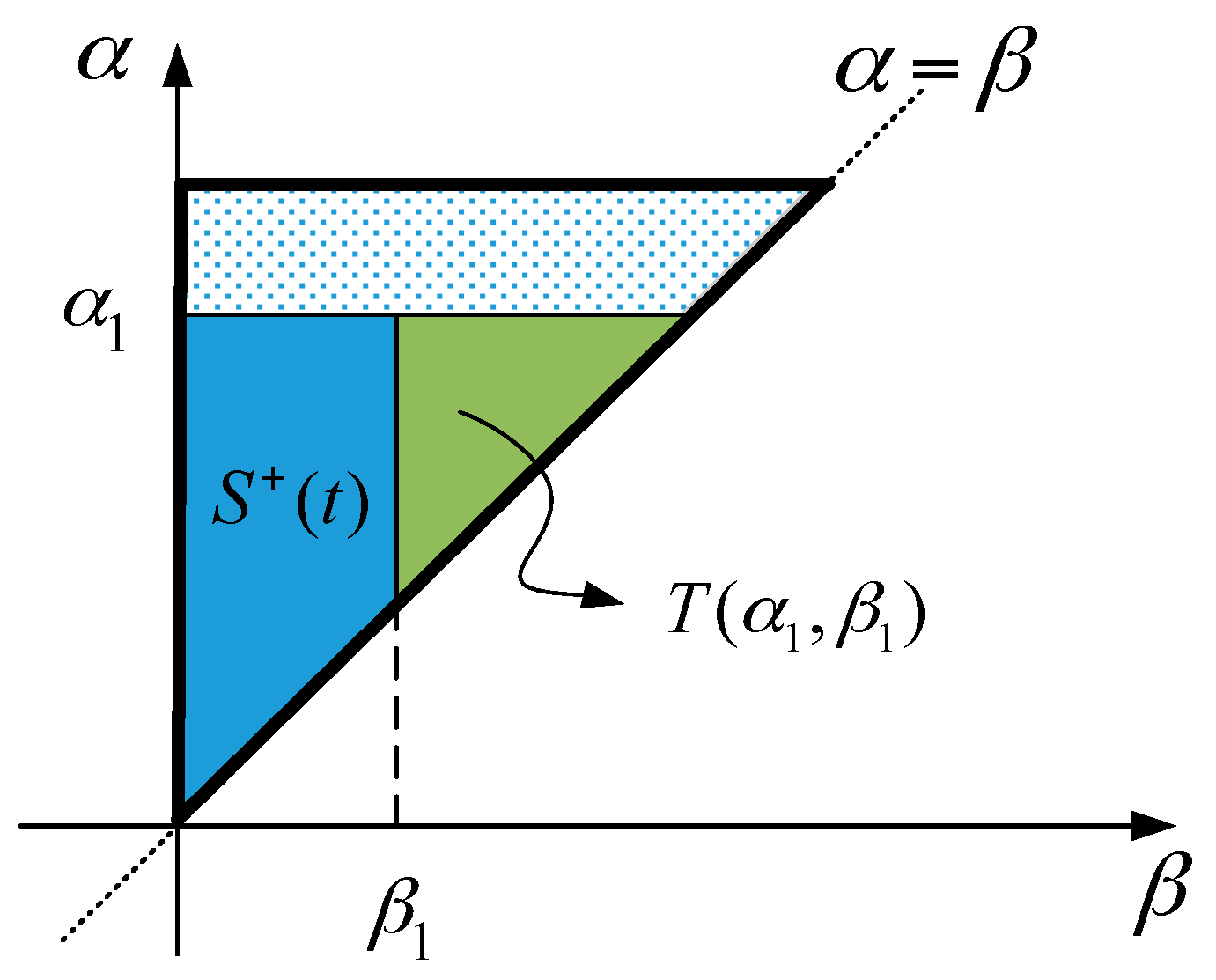
The Preisach model was used to model the hysteresis phenomenon. The hysteresis of the MSM actuator was modeled on a Preisach plane by collecting experimental data. The desired position could be achieved by applying the inverse Preisach model, which was also used as a hysteresis compensator. The novel controller combined the hysteresis compensator and path controller. The path controllers, including PID controller and MFSMC, were implemented for comparison.
Different controller trajectories were tested, including sinusoidal wave, decaying sinusoidal wave, sinusoidal wave in higher frequency and 5th order trajectory. It was shown that the MFSMC path control can perform better than PID controller in the path tracking control experiments. Besides, the novel controller by combining path controllers with the hysteresis compensator was able to improve tracking accuracy. The path tracking control experiments verified that the best performance was the MFSMC path controller with the hysteresis compensator.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}