
A Non-Intrusive Pressure Sensor by Detecting Multiple Longitudinal Waves

Abstract
:1. Introduction
2. Pressure Measurement Method Based on LCR Wave and Reflected Longitudinal Waves
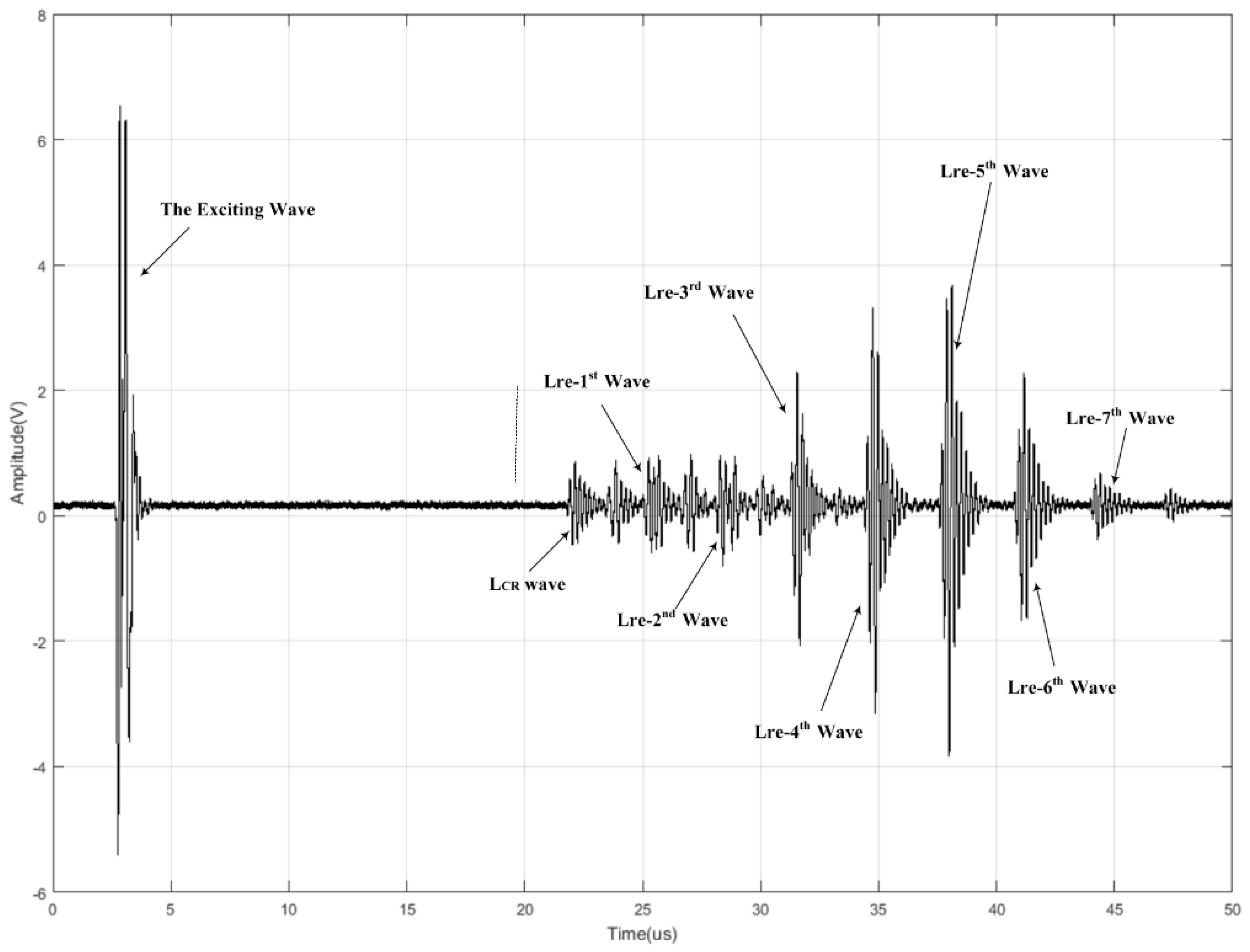
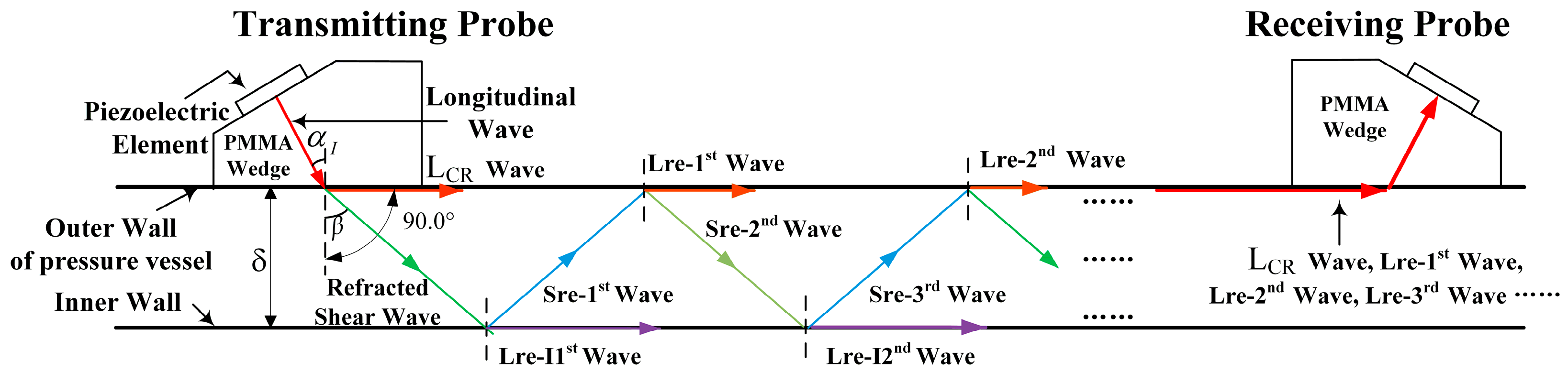
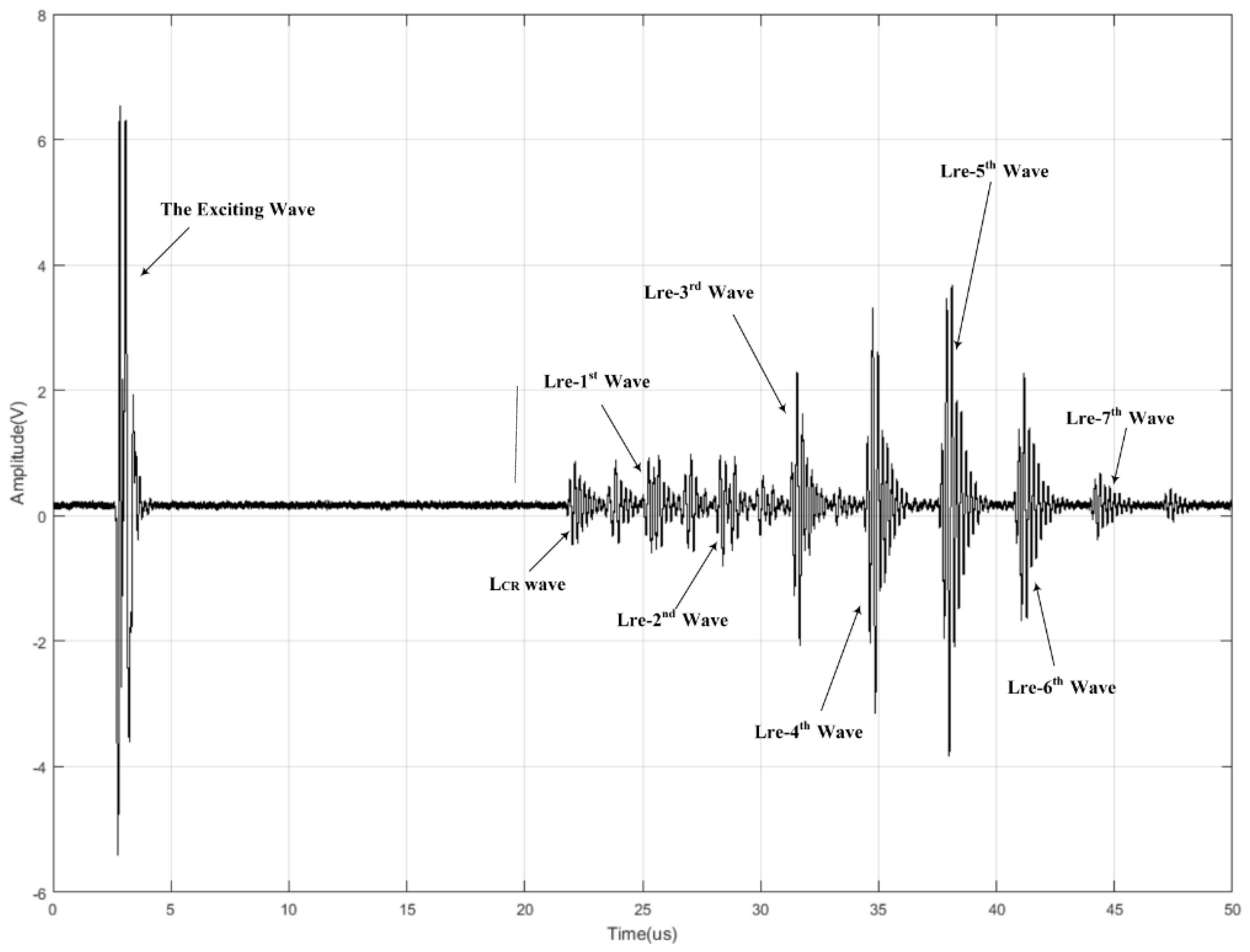
2.1. Generation of Multiple Waves in the Vessel Wall
2.2. The Acoustoelastic Effect and the Relationship between Pressure and Travel-Time Change
2.3. The Multi-Waves Fusion Algorithm
3. The Ultrasonic Pressure Sensor and the Experimental System
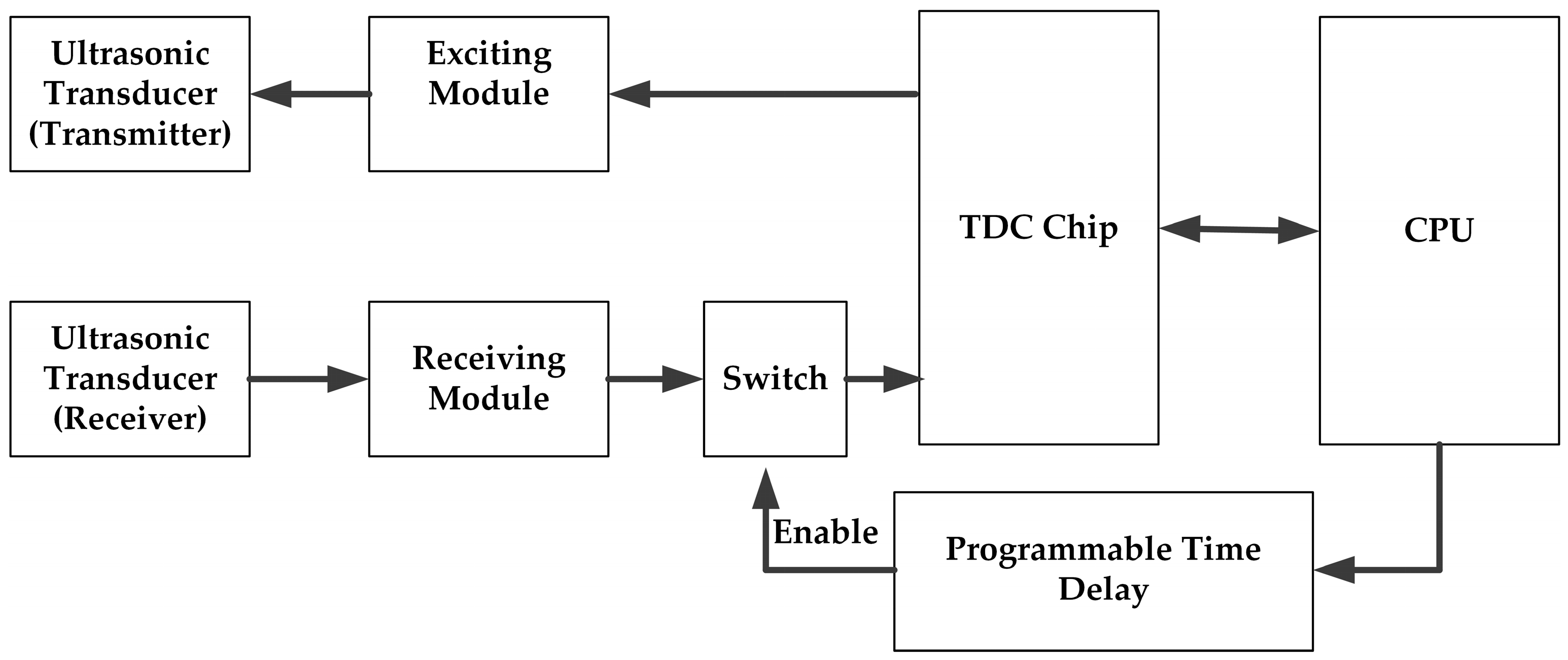
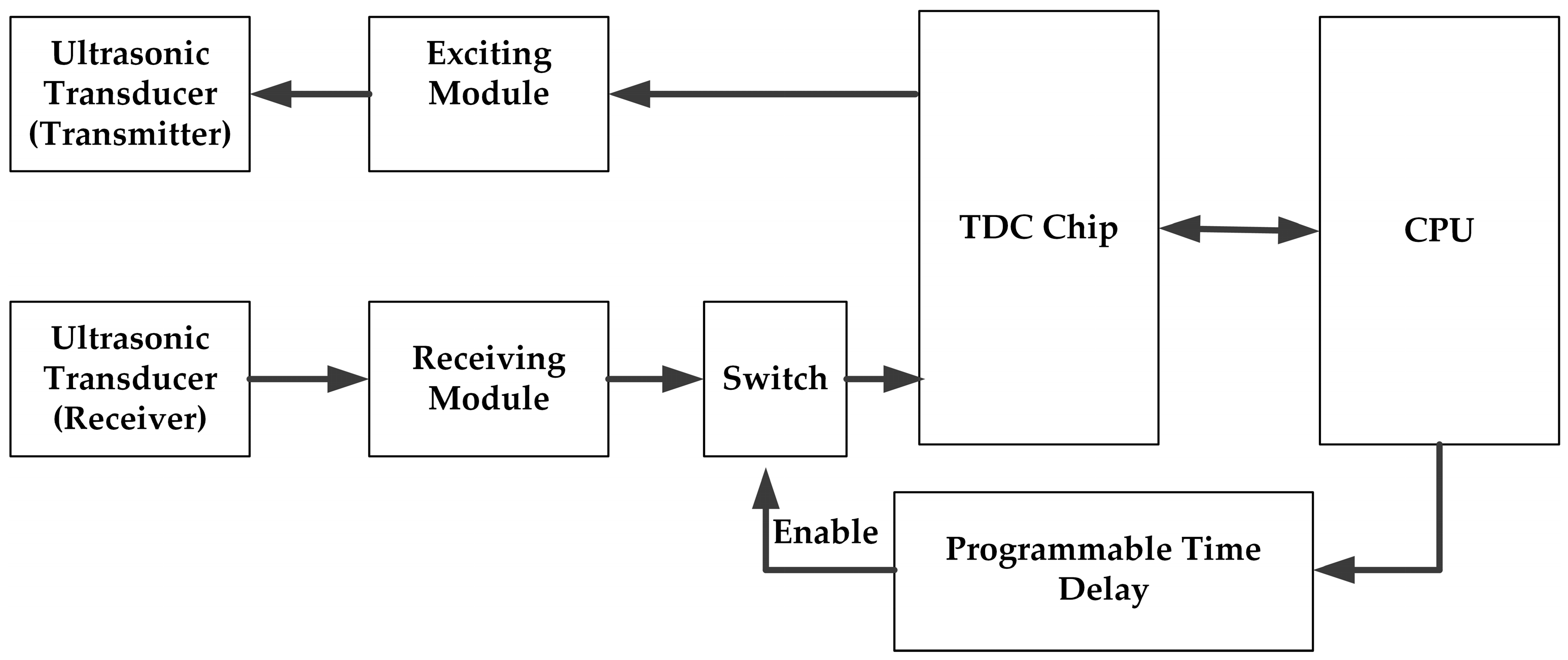
3.1. The Pressure Sensor Based on Ultrasonic Wave
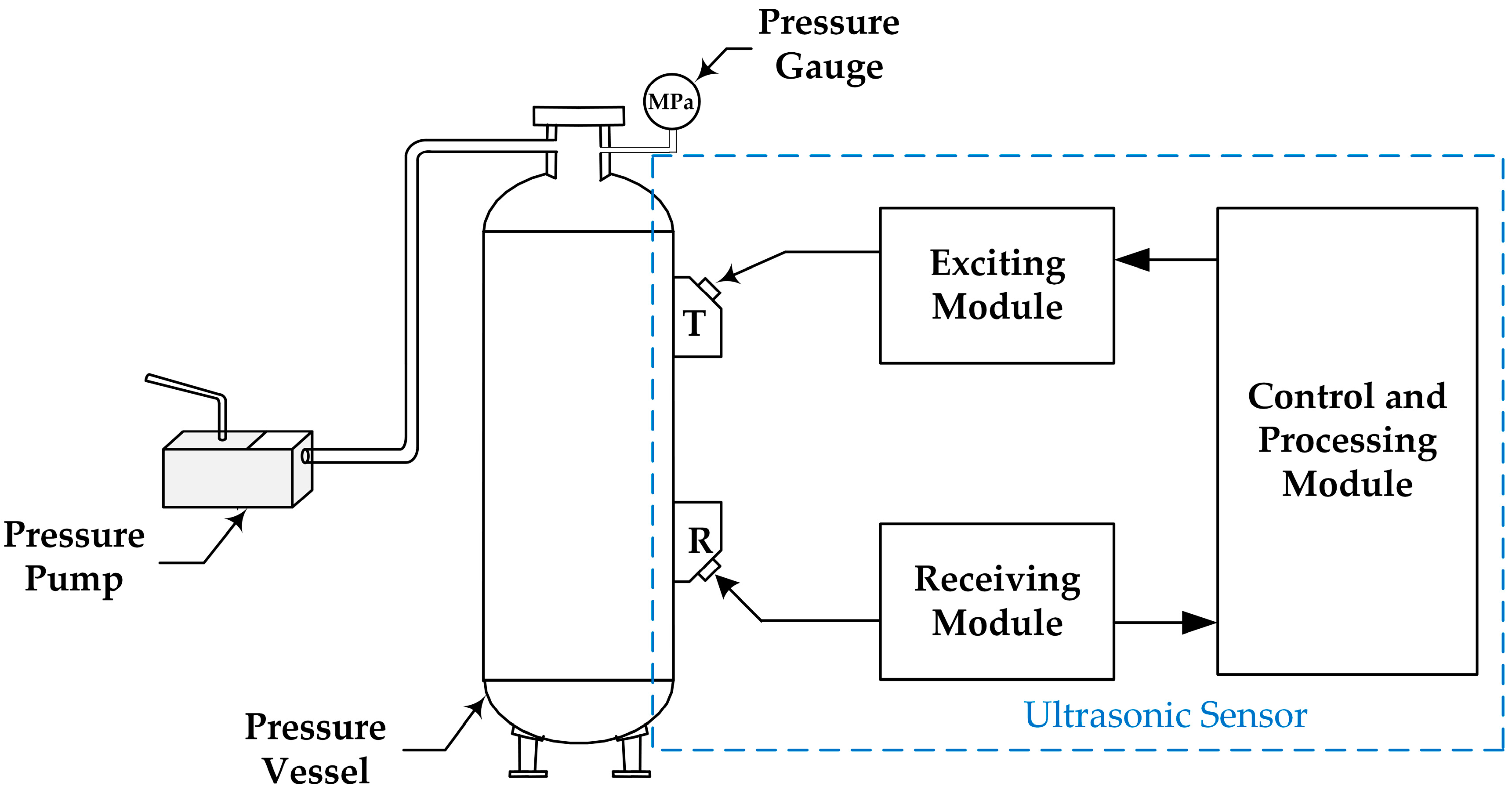
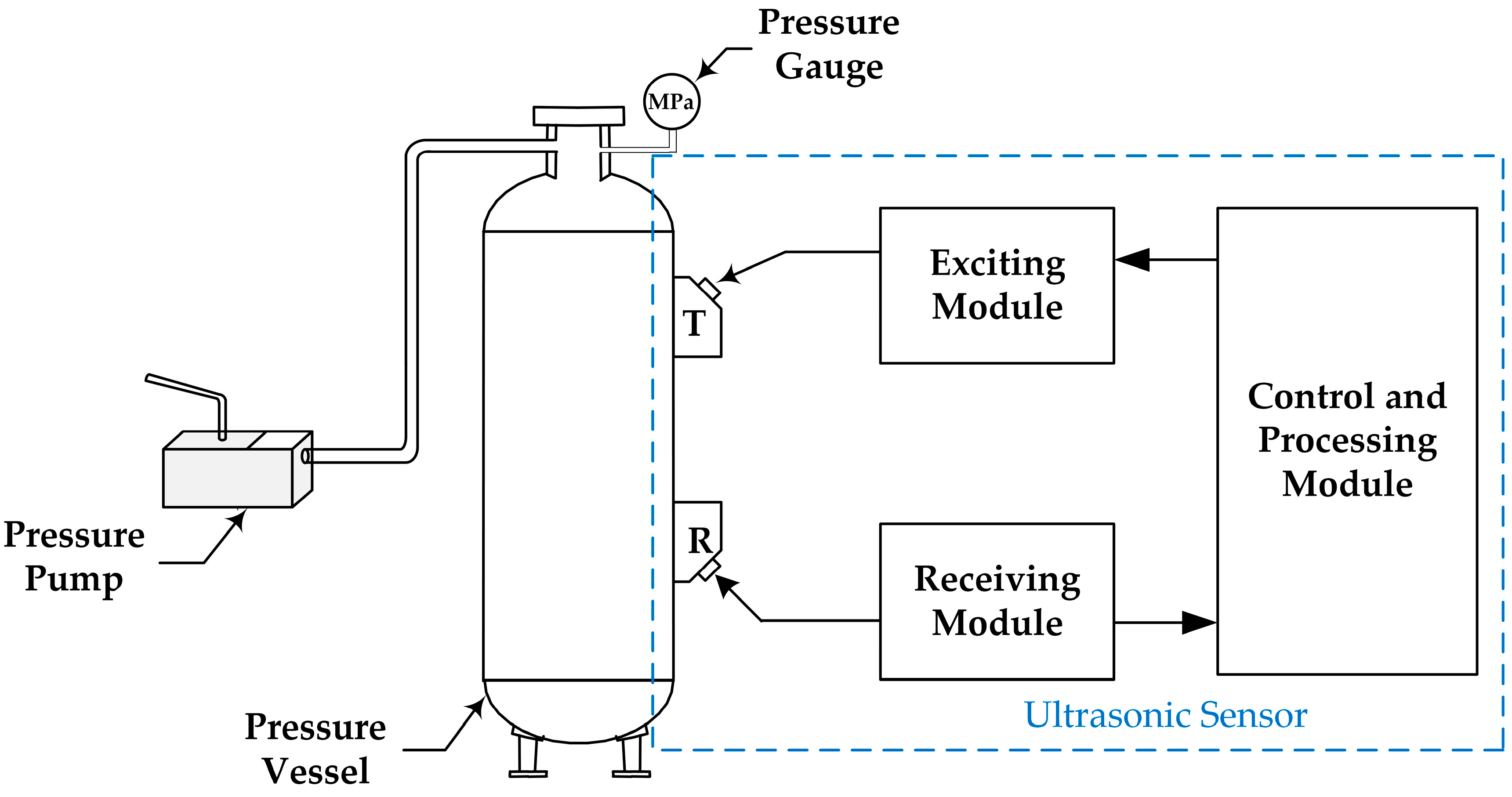
3.2. The Experimental System
4. Results Analysis
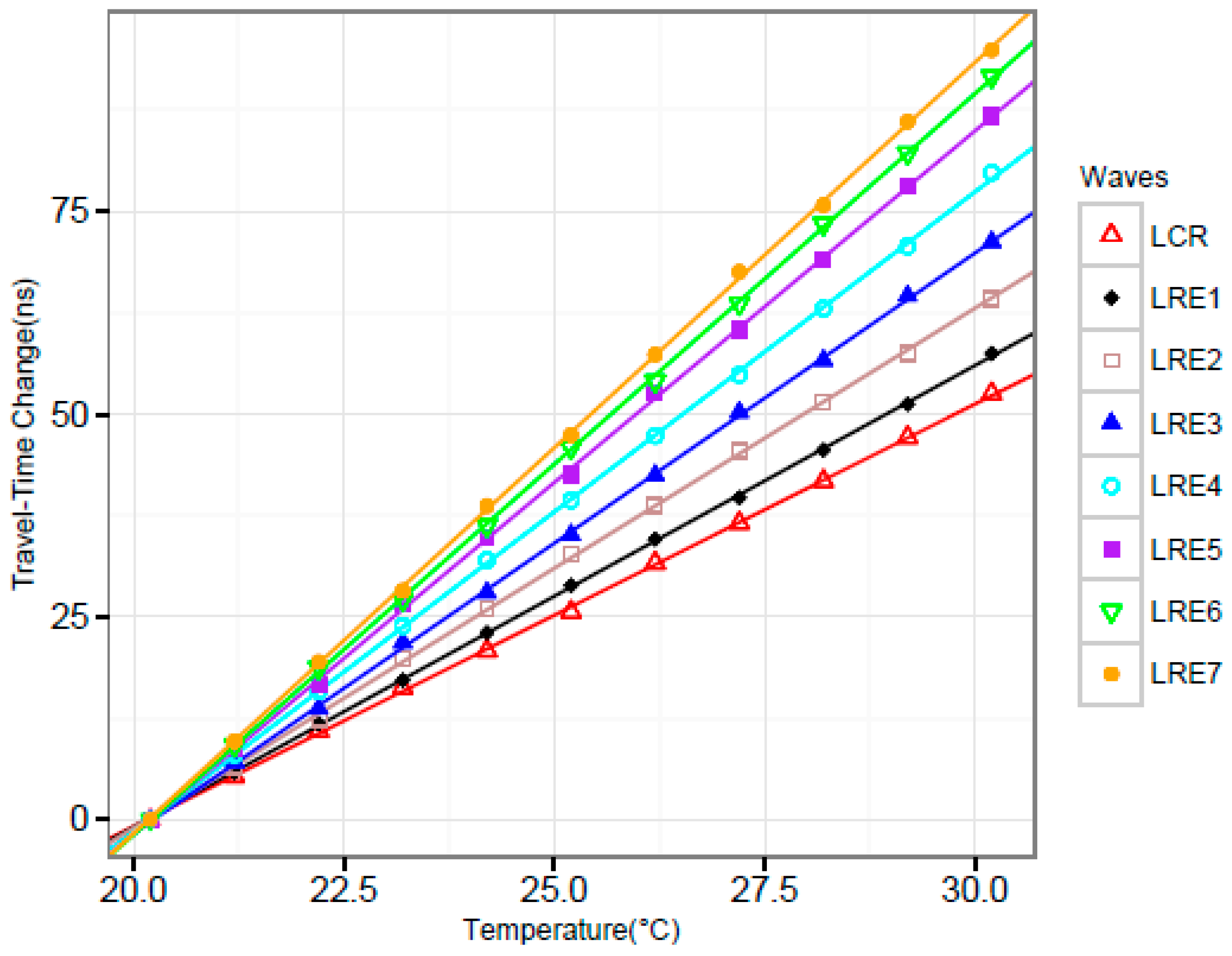
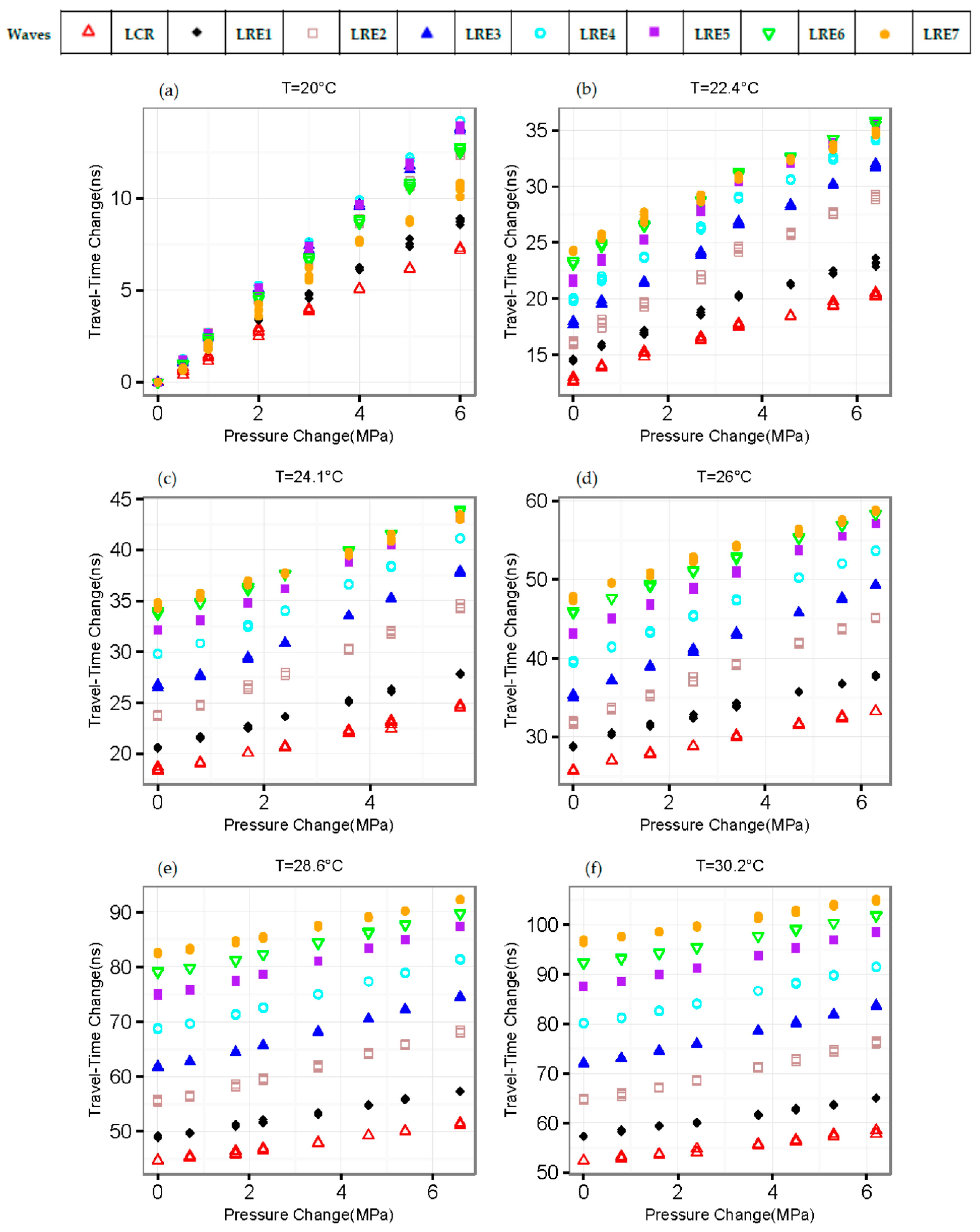
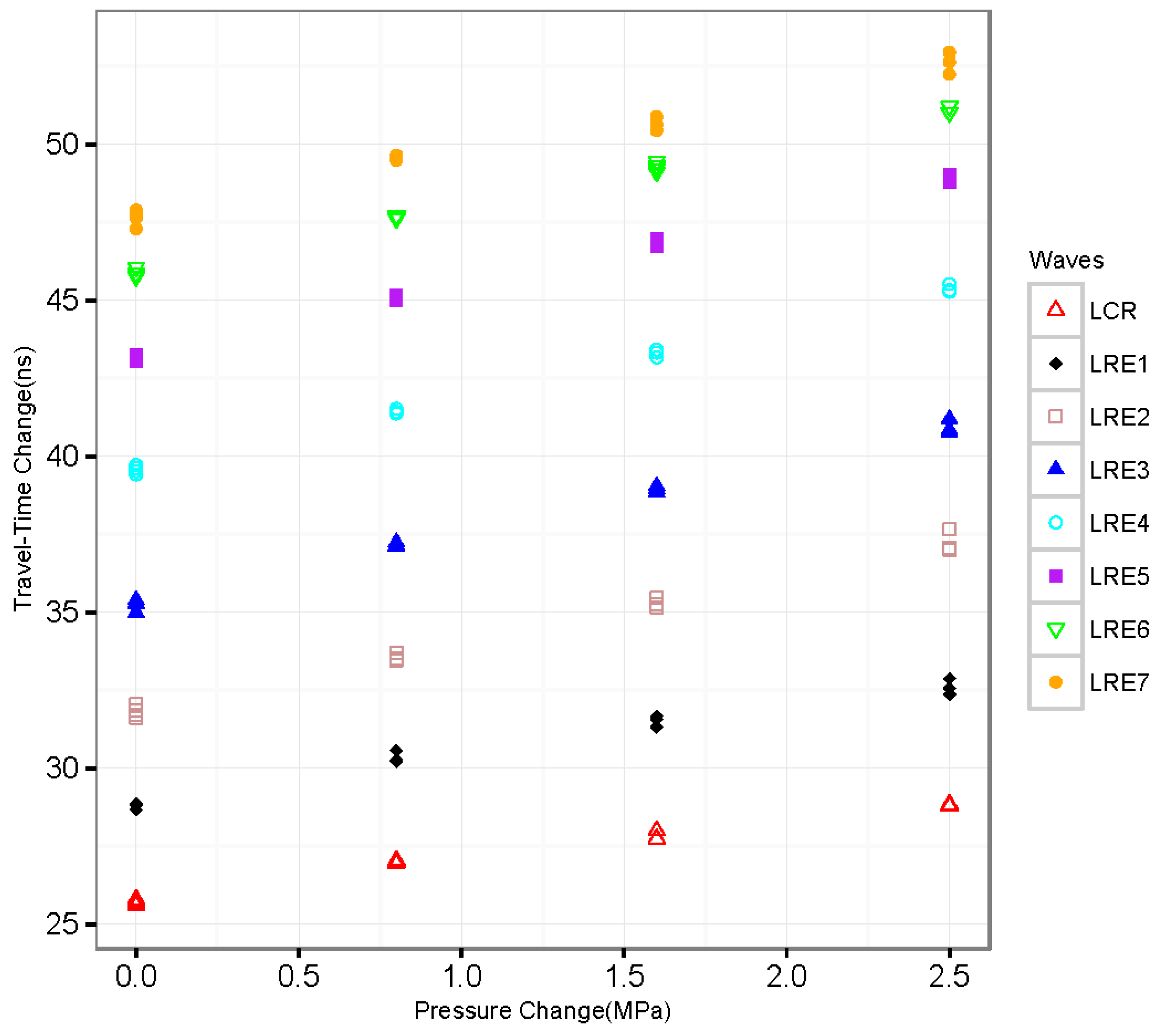
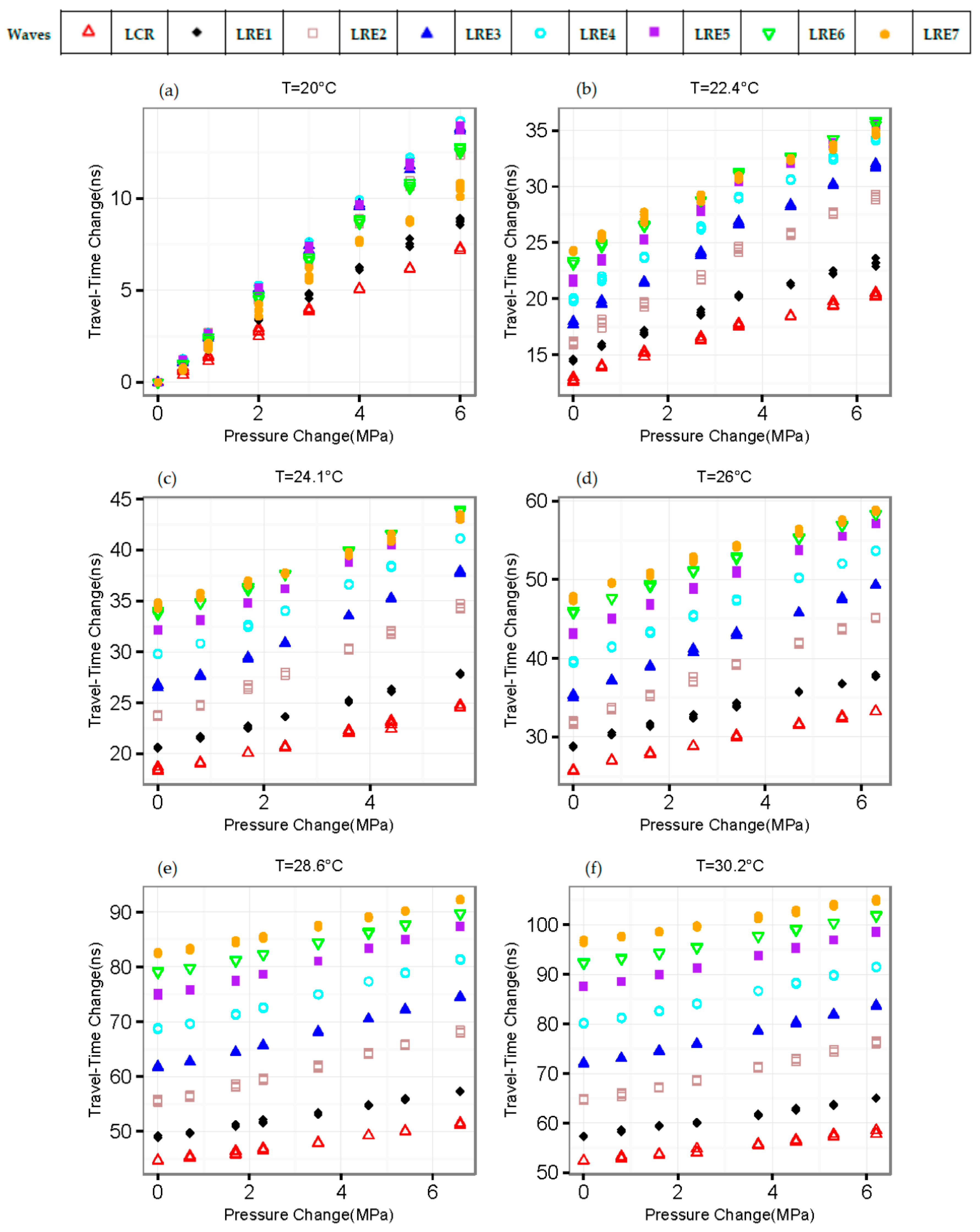
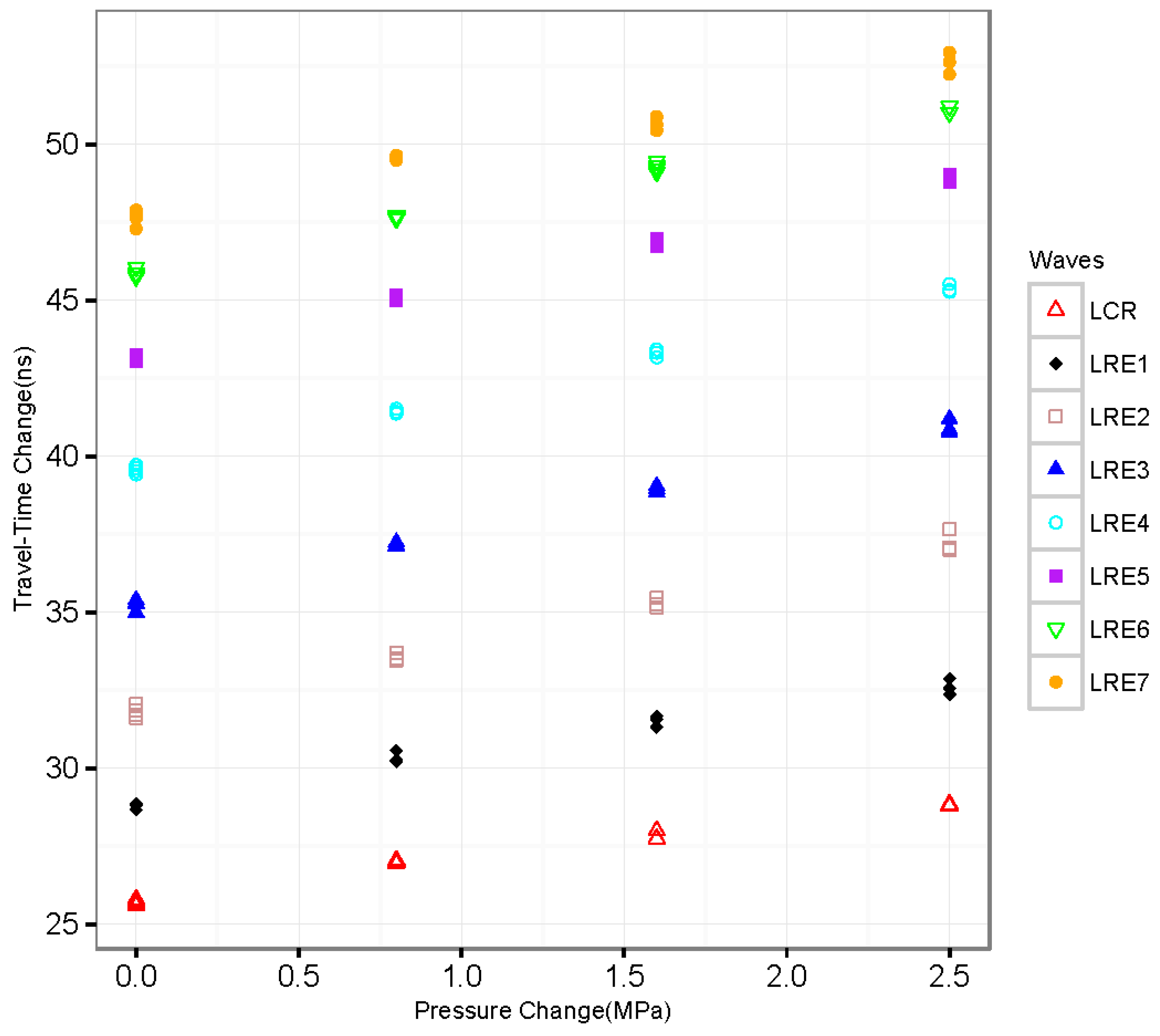
4.1. Change in Travel-Time with Temperature and Pressure
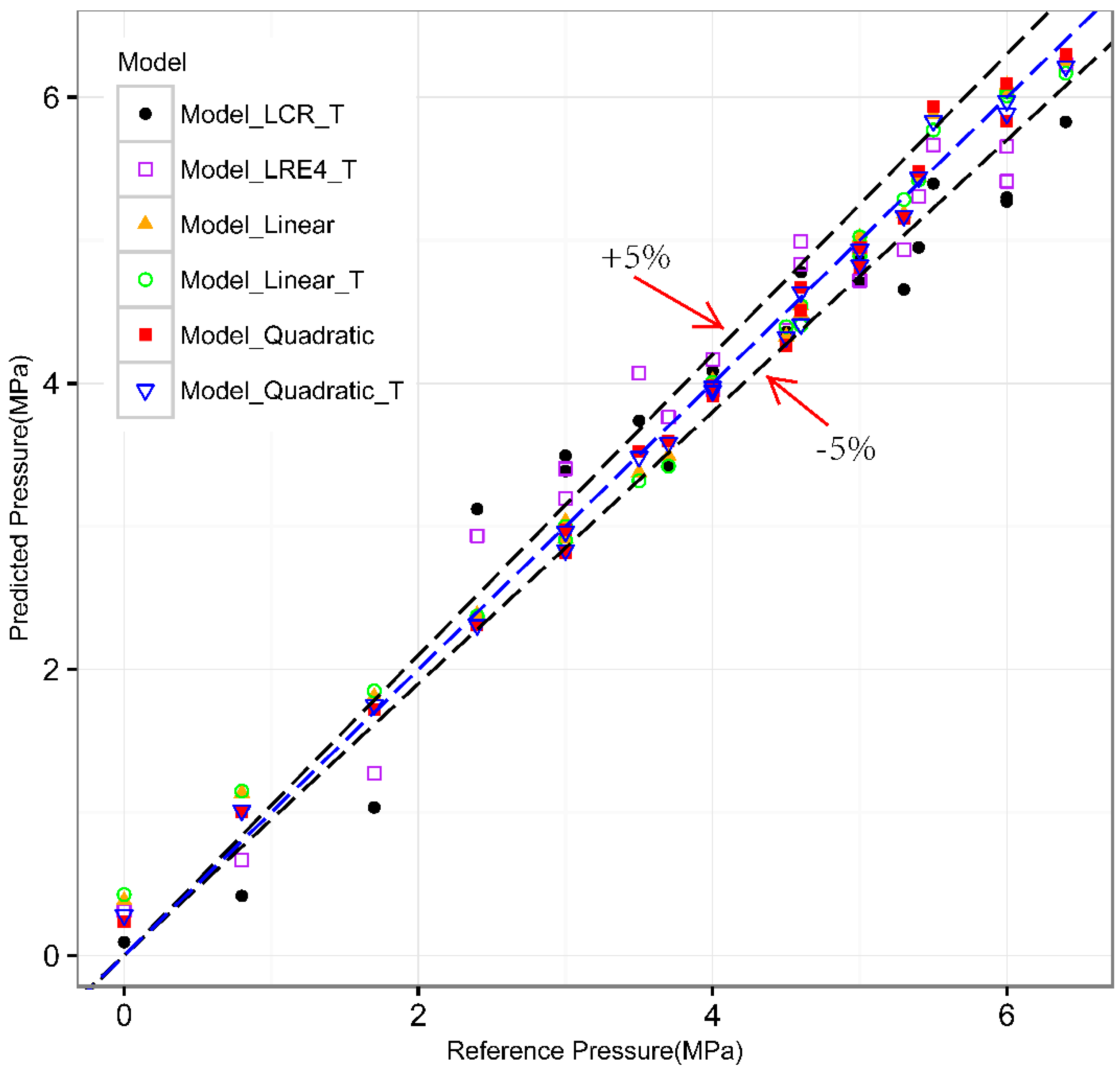
4.2. Measurement Models Based on Different Waves
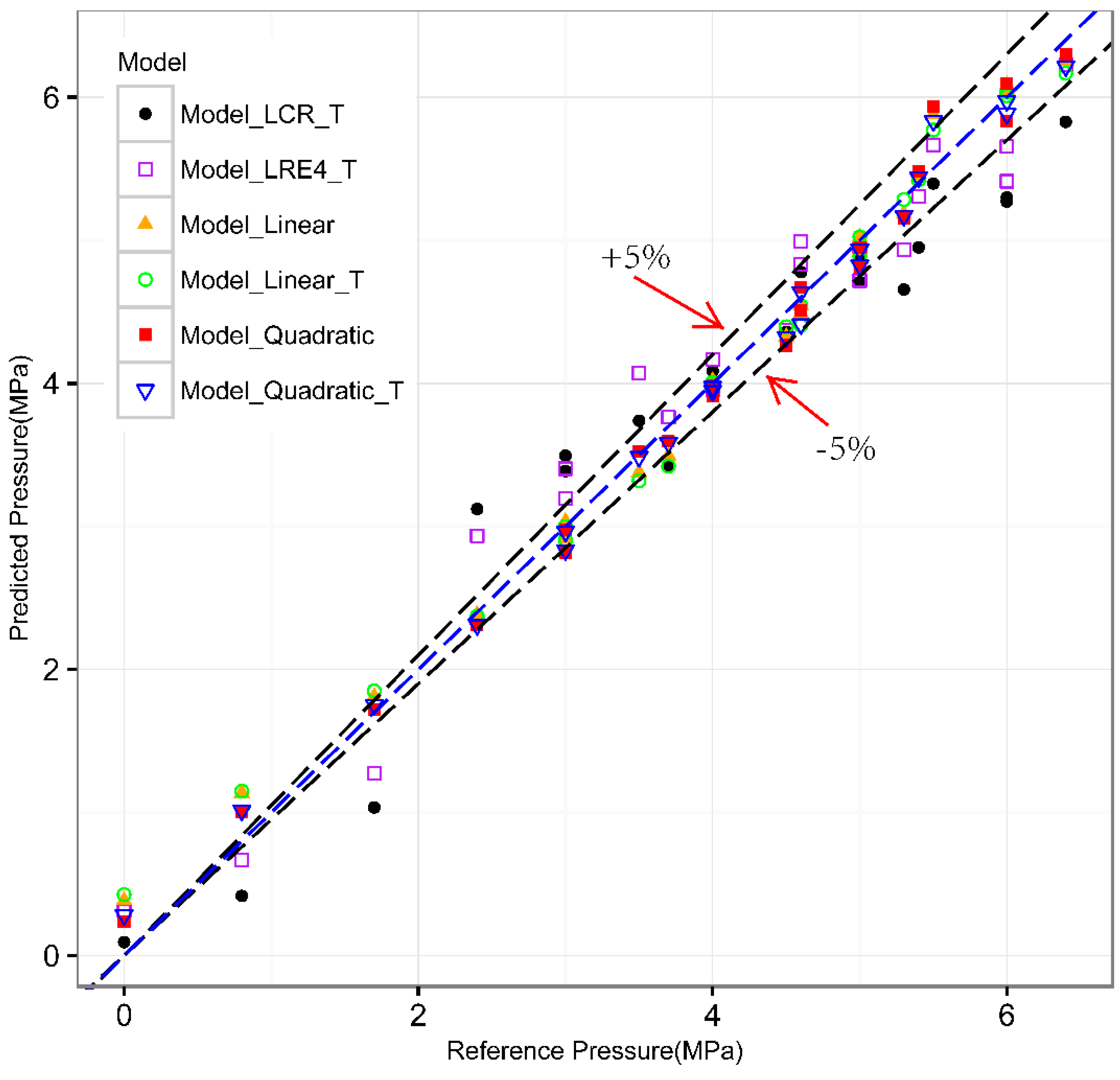
4.3. Experimental Results for Pressure Measurement
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Guers, M.J.; Fontana, C.J.; Zilinskis, D.R.; Tittmann, B.R. Investigation of Noninvasive Approaches for Pressure Measurement. In Review of Progress in Quantitative Nondestructive Evaluation; AIP Publishing: Melville, NY, USA, 2007; pp. 1653–1659. [Google Scholar]
- Hoffmann, K. An Introduction to Measurements Using Strain Gages: With 172 Figures and Tables; Hottinger Baldwin Messtechnik GmbG: Waalwijk, The Netherlands, 1989. [Google Scholar]
- Huang, J.; Yuan, H.; Cui, Y.; Zheng, Z. Nonintrusive pressure measurement with capacitance method based on FLANN. IEEE Trans. Instrum. Meas. 2010, 59, 2914–2920. [Google Scholar] [CrossRef]
- Zhang, H.; He, Q.; Yan, Y. A new nondestructive technique for measuring pressure in vessels by surface waves. Appl. Acoust. 2008, 69, 891–900. [Google Scholar] [CrossRef]
- Guers, M.J.; Fontana, C.J.; Tittmann, B.R. A Noninvasive Pressure Measurement Technique and the Potential for Integrated Calibration. In Review of Progress in Quantitative Nondestructive Evaluation: 34th Annual Review of Progress in Quantitative Nondestructive Evaluation; AIP Publishing: Melville, NY, USA, 2008; pp. 1500–1504. [Google Scholar]
- Ling, Z.; Zhou, H.; Zhang, H. Nondestructive Pressure Measurement in Vessels Using Rayleigh Waves and L-CR Waves. IEEE Trans. Instrum. Meas. 2009, 58, 1578–1584. [Google Scholar] [CrossRef]
- Bi, Y.; Zhou, H.; Huang, Z.; Zhou, H.; Yang, X. Ultrasonic pressure measurement in pressure vessels. Rev. Sci. Instrum. 2014, 85, 125002. [Google Scholar] [CrossRef] [PubMed]
- Vangi, D.; Virga, A. A practical application of ultrasonic thermal stress monitoring in continuous welded rails. Exp. Mech. 2007, 47, 617–623. [Google Scholar] [CrossRef]
- Harkreader, K. Effects of temperature on high density polyethylene piping and accuracy of ultrasonic thickness gaging. Mater. Eval. 2001, 59, 1033–1036. [Google Scholar]
- Bray, D.E.; Vela, J.; Al-Zubi, R.S. Stress and temperature effects on ultrasonic properties in cross-linked and high density polyethylene. J. Press. Vessel Technol. 2005, 127, 220–225. [Google Scholar] [CrossRef]
- Hughes, D.S.; Kelly, J.L. Second-order elastic deformation of solids. Phys. Rev. 1953, 92. [Google Scholar] [CrossRef]
- Symon, K.R. Mechanics, Massachusetts; Addison-Wesley: Reading, MA, USA, 1971. [Google Scholar]
- Liu, H.W.; Lin, J.X.; Cao, M.L. Shell Theory; Zhejiang University Press: Hangzhou, China, 1987. [Google Scholar]
- UT Material Properties Tables. Available online: https://www.nde-ed.org/GeneralResources/Material Properties/UT/ut_matlprop_metals.htm (accessed on 25 March 2016).
- Hall, D.L.; Llinas, J. An introduction to multisensor data fusion. Proc. IEEE 1997, 85, 6–23. [Google Scholar] [CrossRef]
- Draper, N.R.; Smith, H. Applied Regression Analysis; John Wiley & Sons: New York, NY, USA, 2014. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | 37 Mn |
|---|---|
| Outer Radius (mm) | 109.5 |
| Inner Radius (mm) | 103.8 |
| Thickness (mm) | 5.7 |
| Height (mm) | 725 |
| Coefficient | |||||
| Value | −0.0097 | 0.4370 | 0.1556 | 0.2165 | 1.5668 |
| Coefficient | |||||
| Value | −0.6668 | −1.0711 | −0.1895 | −0.2326 |
| Coefficient | |||||
| Value | −0.1209 | 0.3394 | 0.1382 | 0.5761 | 1.4274 |
| Coefficient | |||||
| Value | −0.8771 | −1.1323 | −0.1212 | 0.2488 | −0.1637 |
| Coefficient | ||||||
| Value | 0.3082 | −0.5936 | 0.5960 | 0.4623 | 0.2528 | 0.9679 |
| Coefficient | ||||||
| Value | −0.5936 | −1.1383 | −0.1933 | −0.0026 | −0.0041 | 0 |
| Coefficient | ||||||
| Value | 0.0058 | 0 | 0 | 0 | −0.1752 |
| Coefficient | ||||||
| Value | 0.4347 | −0.0051 | 0.4799 | 0.5627 | 0.6848 | 1.2265 |
| Coefficient | ||||||
| Value | −1.4960 | −1.1553 | 0 | −0.0024 | −0.0043 | 0 |
| Coefficient | ||||||
| Value | 0 | 0.0065 | 0 | −0.0010 | 0.3221 | −0.1742 |
| Model | R2 | Adjusted R2 | RMSE |
|---|---|---|---|
| Model_LCR_T | 0.5977 | 0.5937 | 1.3229 |
| Model_LRE4_T | 0.7210 | 0.7183 | 1.1016 |
| Model_Linear | 0.9909 | 0.9905 | 0.2020 |
| Model_Linear_T | 0.9917 | 0.9913 | 0.1930 |
| Model_Quadratic | 0.9926 | 0.9921 | 0.1840 |
| Model_Quadratic_T | 0.9935 | 0.9931 | 0.1724 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, H.; Lin, W.; Ge, X.; Zhou, J. A Non-Intrusive Pressure Sensor by Detecting Multiple Longitudinal Waves. Sensors 2016, 16, 1237. https://doi.org/10.3390/s16081237
Zhou H, Lin W, Ge X, Zhou J. A Non-Intrusive Pressure Sensor by Detecting Multiple Longitudinal Waves. Sensors. 2016; 16(8):1237. https://doi.org/10.3390/s16081237
Chicago/Turabian StyleZhou, Hongliang, Weibin Lin, Xiaocheng Ge, and Jian Zhou. 2016. "A Non-Intrusive Pressure Sensor by Detecting Multiple Longitudinal Waves" Sensors 16, no. 8: 1237. https://doi.org/10.3390/s16081237
APA StyleZhou, H., Lin, W., Ge, X., & Zhou, J. (2016). A Non-Intrusive Pressure Sensor by Detecting Multiple Longitudinal Waves. Sensors, 16(8), 1237. https://doi.org/10.3390/s16081237