1. Introduction
Interferometric fiber optic gyroscope (IFOG) is an optical sensor based on Sagnac effect, which is used to determine the angular velocity of the carrier [
1]. Over the past few decades, it has been developed as a leading instrument in sensing of rotational motion and has been manufactured around the world for a wide range of both military and commercial applications [
2,
3]. Some commercial IFOG with high performance has been reported in recent years [
4,
5], the bias stability specification over environment is 0.0005°/h with the scale factor less than 10 ppm and an angle random walk (ARW) < 8 × 10
−5.0/h
1/2. A key component in IFOG is fiber coil whose winding quality will affect the performance of gyroscope directly. Thus far, numerous researches have been performed to improve the adaptability of IFOG in the harsh environment. The theoretical model for thermal induced rate error of IFOG with temperature ranging from −40 °C to 60 °C is established in [
6], which can be potentially used in the temperature compensation for gyroscope. To improve the thermal performance of the fiber-optic gyroscope, the approach of using air-core photonic-bandgap fiber is present in [
7] and it is demonstrated by experiments in [
8] that the thermal sensitivity is 6.5 times less than the conventional fiber coil. Furthermore, modeling for rate errors of IFOG induced by moisture diffusion is present in [
9]. In practical applications for high precision IFOG, mechanical vibration is a common and inevitable environmental factor that typically encountered in the inertial navigation platforms, and it will degrade the performance of the gyroscope seriously. Generally, the anti-vibration performance of IFOG can be effectively improved by optimizing the mechanical structure design, avoiding the resonant frequency, and tightening the optical components specifically [
10,
11,
12]. Nevertheless, these preliminary methods cannot reveal the principles of vibration error in essence. In other words, a systematic study to analyze the vibration error of IFOG has not been thoroughly addressed and that is the main purpose of our work.
The vibrational problem of IFOG is rather complicated and tough in practical engineering. In other words, it is very difficult to establish a mathematical model precisely to describe and analyze the vibration error of gyroscope due to various disturbances such as imperfect fiber coil and inaccurate parameters for computation [
13]. Furthermore, previous work in [
14] mainly focus on the vibration error from the perspective of control equation of IFOG as well as signal processing in circuit, but not considered the error induced by imperfect winding of fiber coil. To the best of our knowledge, this is the first report to investigate IFOG vibration error in terms of strain distribution in the quadrupolar (QAD) fiber coil. The paper is organized as follows: The theory of closed-loop IFOG is introduced in
Section 2. The mathematical model of IFOG rate error induced by vibration is established in
Section 3. The computational results based on the model are provided in
Section 4. Finally, the conclusion and discussion are given in the last section.
2. Description of Closed-Loop IFOG
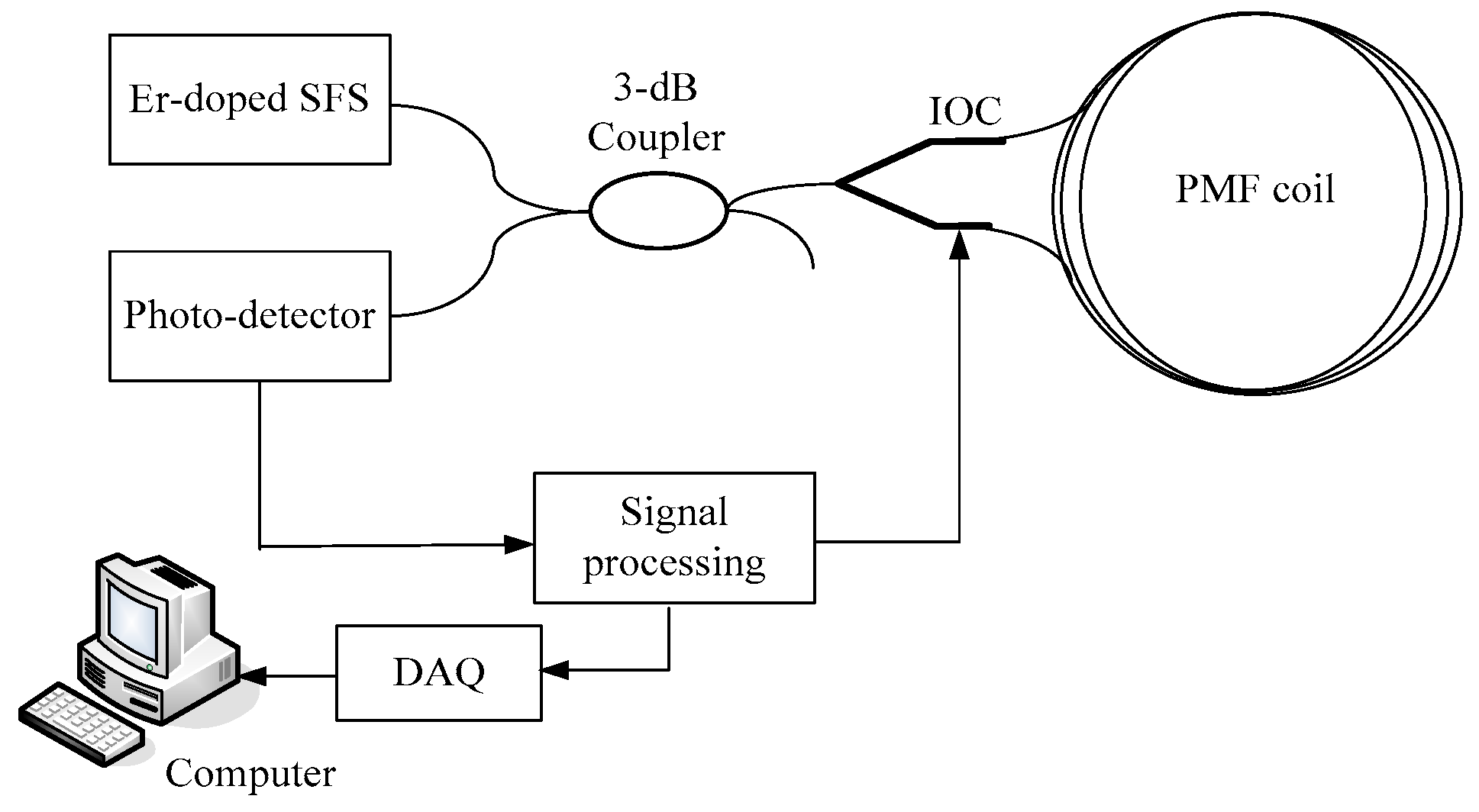
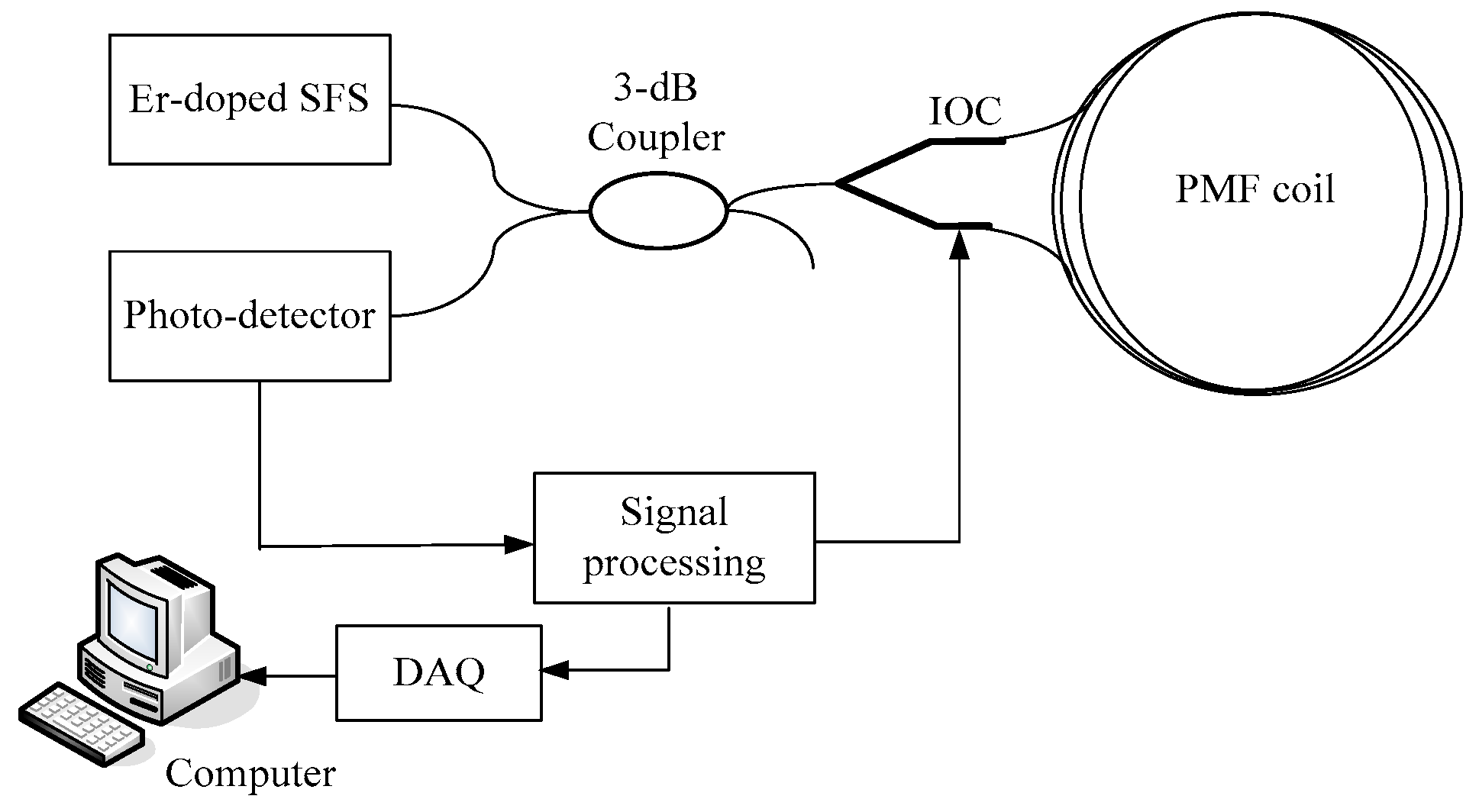
The details of the optical components and the signal processing circuit constructed for closed-loop IFOG are introduced in
Figure 1. To achieve higher output power and better wavelength stability, a broadband Er-doped super fluorescent fiber source (SFS) is utilized as the light source. The 3-dB coupler splits the input light into two waves to propagate in the fiber coil. The Sagnac interferometer consists of an integrated-optic circuit (IOC) and a polarization maintaining fiber (PMF) coil with QAD winding pattern to detect the angular rate
. The signal processing circuit incorporates pre-amplifier, AD converter, high-speed field programmable gate array (FPGA) and DA converter. Moreover, the gyroscope sensitivity is maximized by applying a square wave modulation in the IOC at the frequency of
, where
is the propagation time of light in the fiber coil. The gyroscope output data are acquired by Data Acquisition (DAQ) card and then sent into a computer to be stored and post-processed.
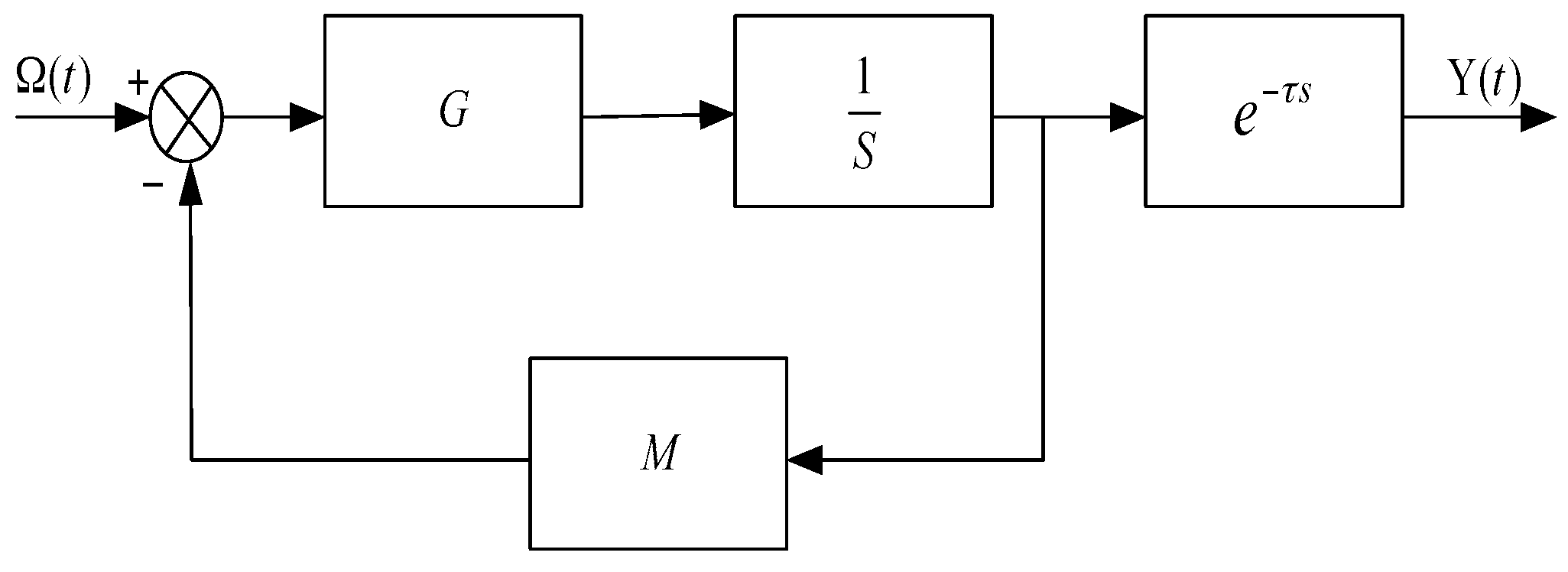
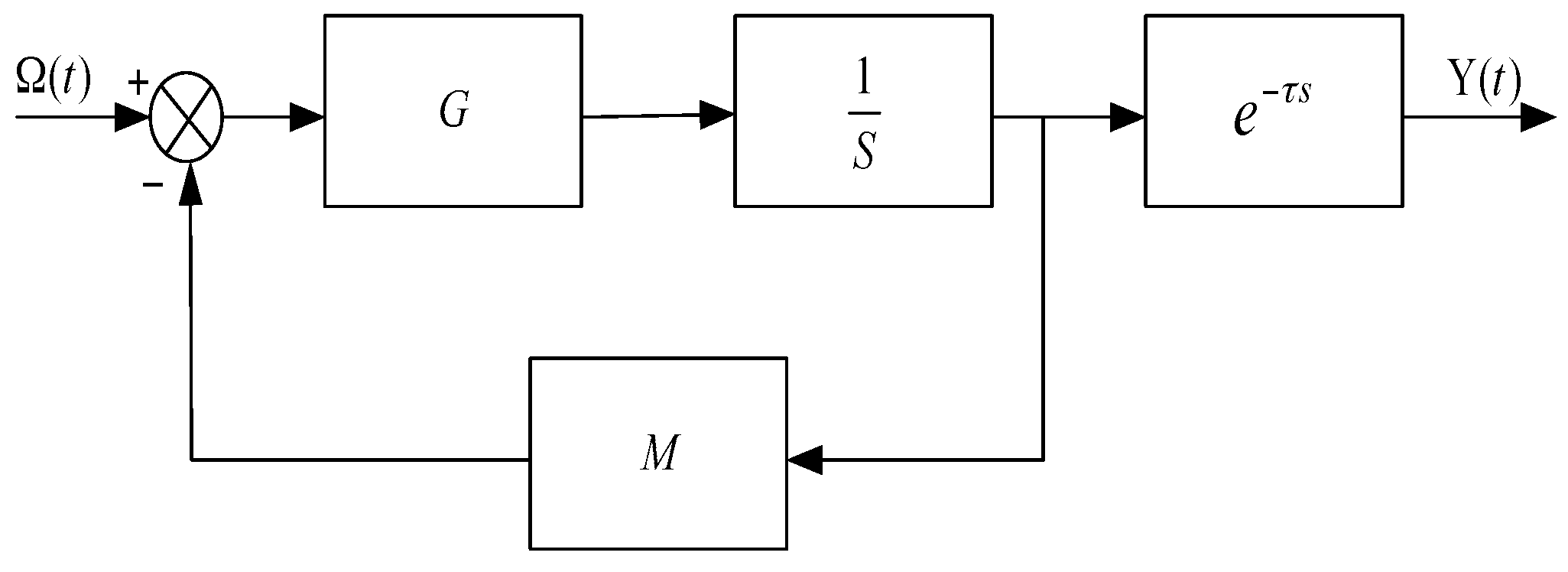
Based on the control theory and
Figure 1, the response of closed-loop IFOG is linear to the angular rate
and the dynamic model can be simplified, as shown in
Figure 2.
G is the gain of the gyroscope control system, which is mainly determined by Sagnac coefficient, photo-detector, pre-amplifier, and AD converter.
is the integral controller in FPGA.
M is the feedback coefficient, which is influenced by DA converter and half-wave voltage of IOC, and 1/
M is the closed-loop scale factor of IFOG. In addition,
denotes the delay unit of the control system.
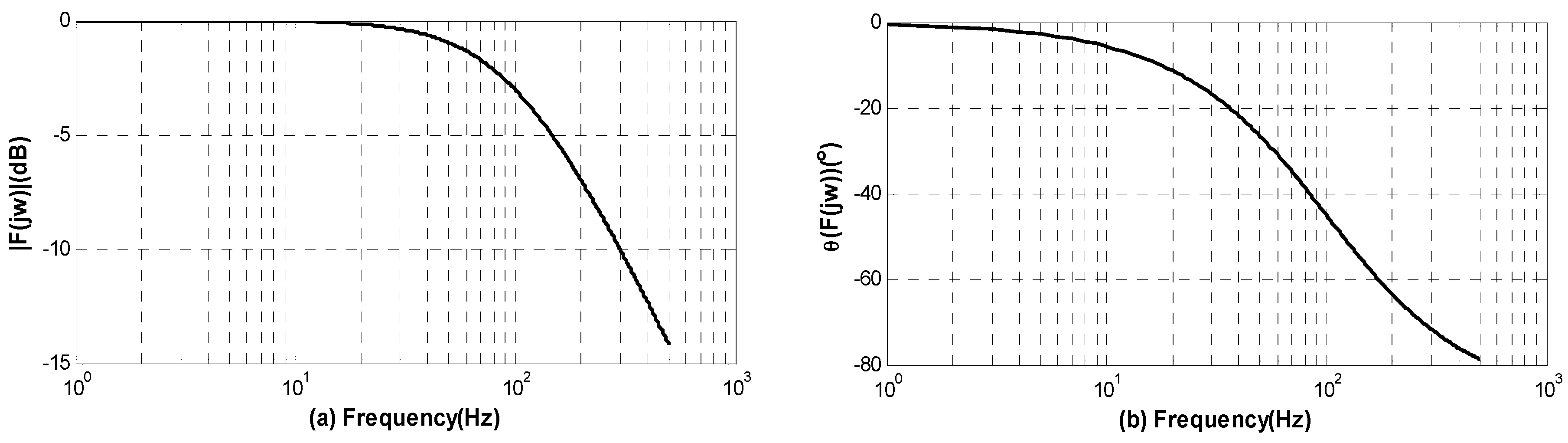
The transfer function of
Figure 2 is given as follows.
Here,
and
. The frequency-amplitude characteristic as well as frequency-phase characteristic of Equation (1) is illustrated as
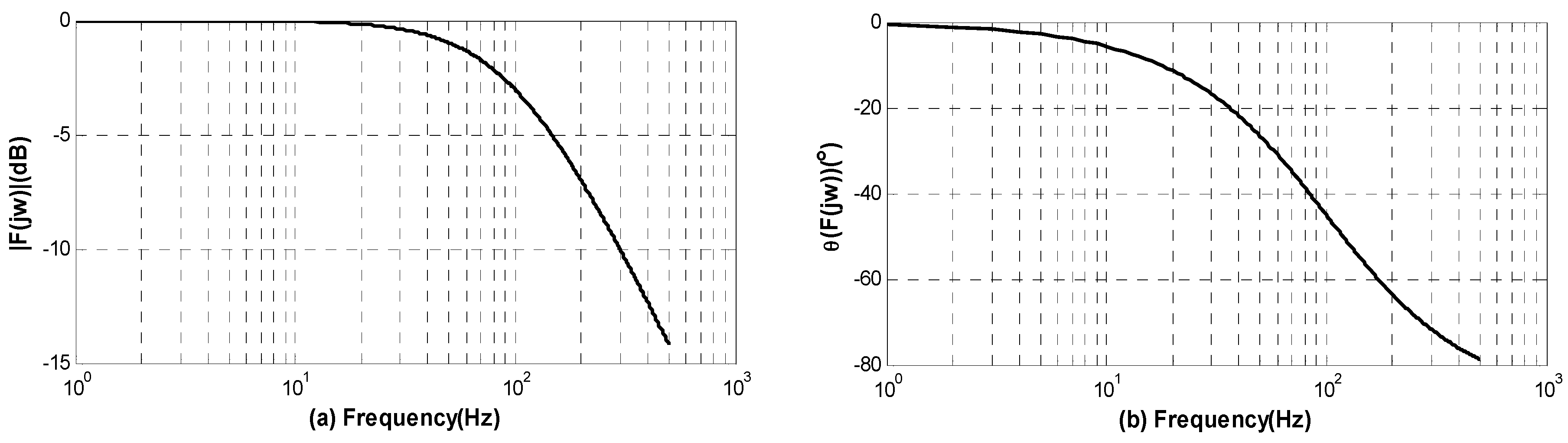
For a high precision IFOG fabricated in our laboratory, the closed-loop scale factor
is 816 LSB/(°/h) and the time constant
is measured as 1.6 ms. In this case, the normalized
curve and
curve (i.e., Bode diagram) are shown in
Figure 3. It is clearly seen from the frequency characteristic curve that the output signal of gyroscope will have a half-attenuation (i.e., −3 dB in
Figure 3) at the frequency of 99.47 Hz. Therefore, the vibration-induced rate error of IFOG with high frequency will be dramatically attenuated after passing Equation (1).
3. Establishment of Vibration Model
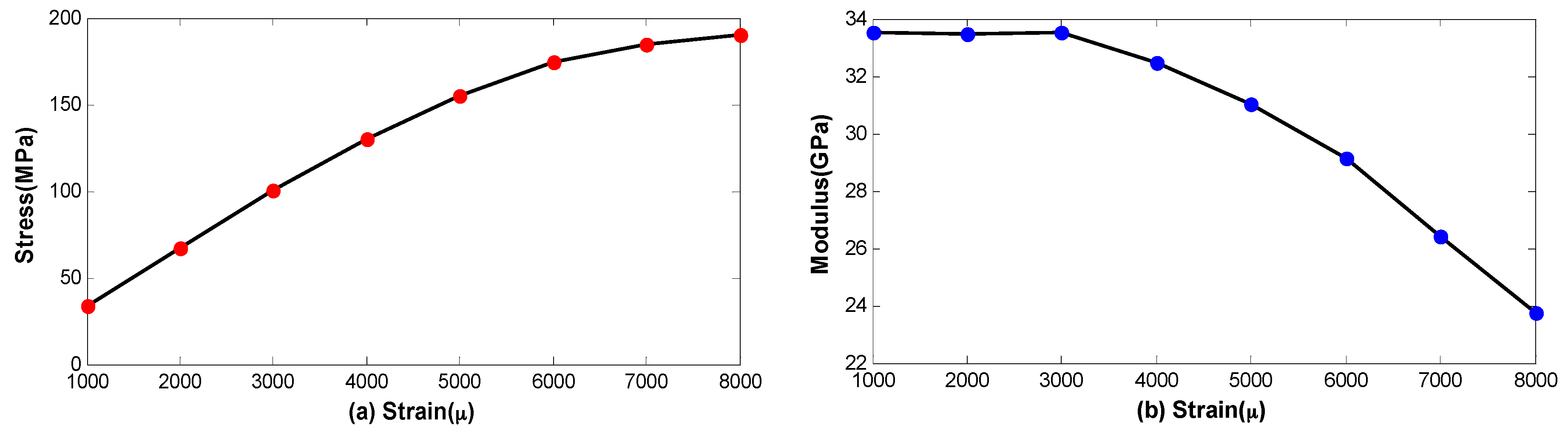
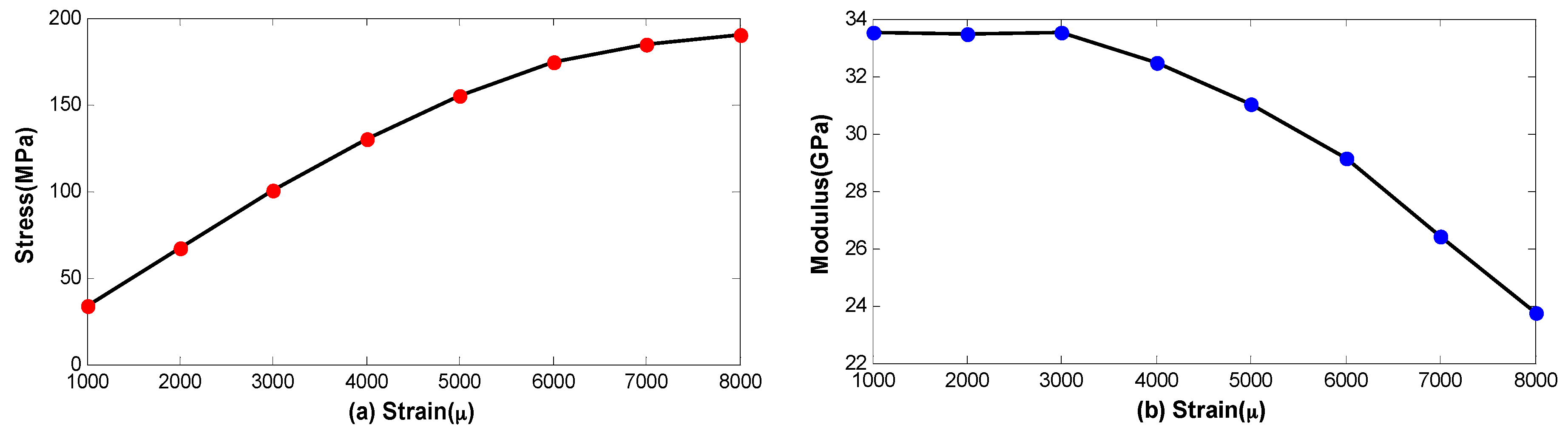
In general, the fiber coil has a tensile strain induced by tensile stress, and the strain distribution is asymmetrical with respect to the midpoint of the fiber coil due to imperfect winding techniques. According to the theory of material mechanics, the elastic modulus of the material is not a constant if the fiber strain exceeds a certain range. In this case, different fiber strain has different fiber elastic modulus after winding and we will use the measurement results from [
15], as illustrated in
Figure 4. Note that the unit of the strain μ denotes the variation of 0.0001% and the curves are fitted by six-order polynomial to guarantee the computational precision.
Figure 4 reveals that the relationship between fiber stress and fiber strain is nonlinear if the stain is more than 3000 μ approximately, and the corresponding elastic modulus becomes variable with respect to the fiber strain.
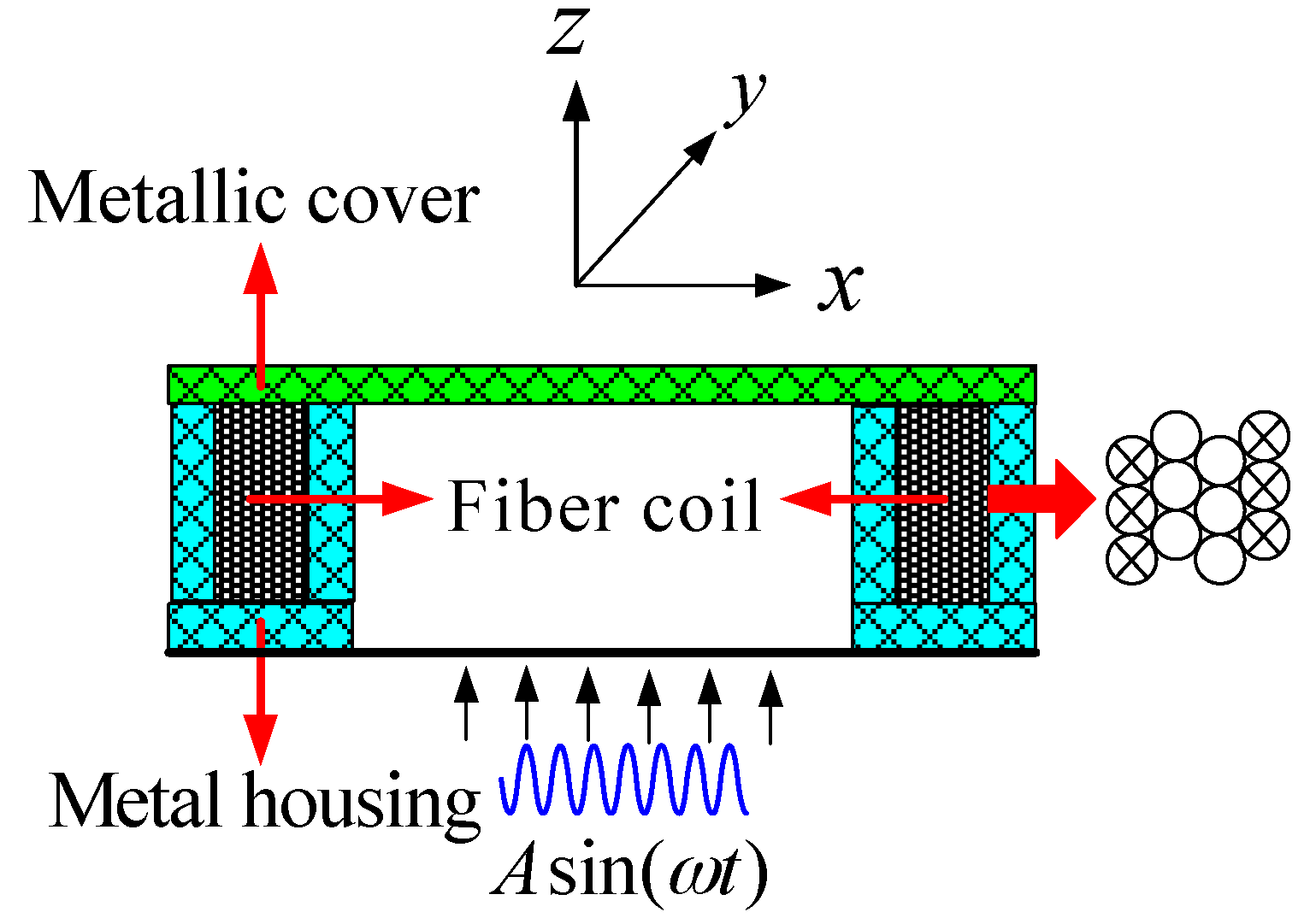
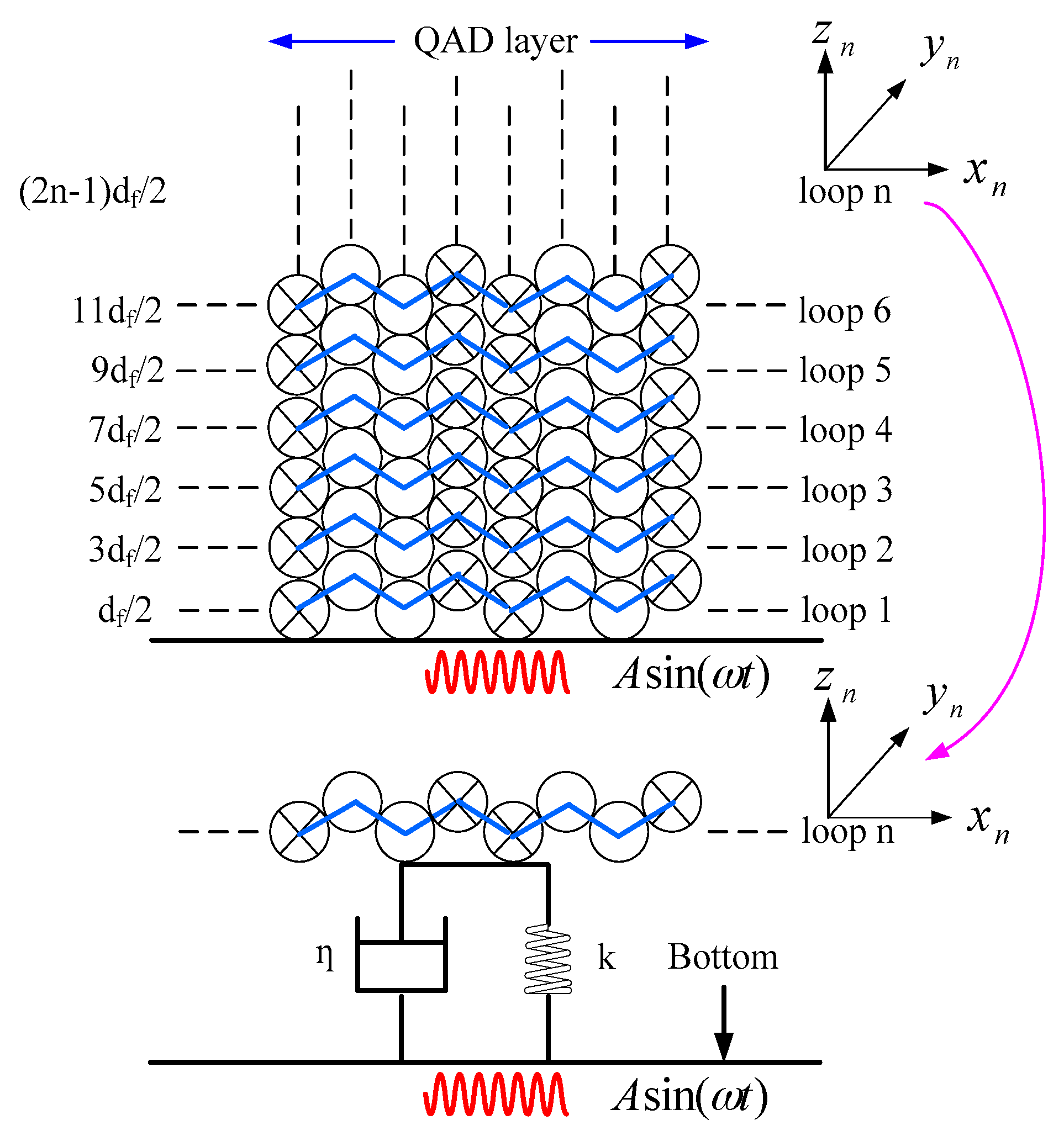
Specifically, the fiber coil without spool is solidified by UV-curing adhesive and fixed in the metal housing by metallic cover, as present in
Figure 5. The movement of the QAD coil under vibration is along z-axis in a global coordinate system. We assume that the acceleration applied to the coil is described as
, where
is vibration amplitude and
is angular vibration frequency. Then the velocity and displacement of the coil motion are given as
and
by integrating
one time and two times, respectively; that is
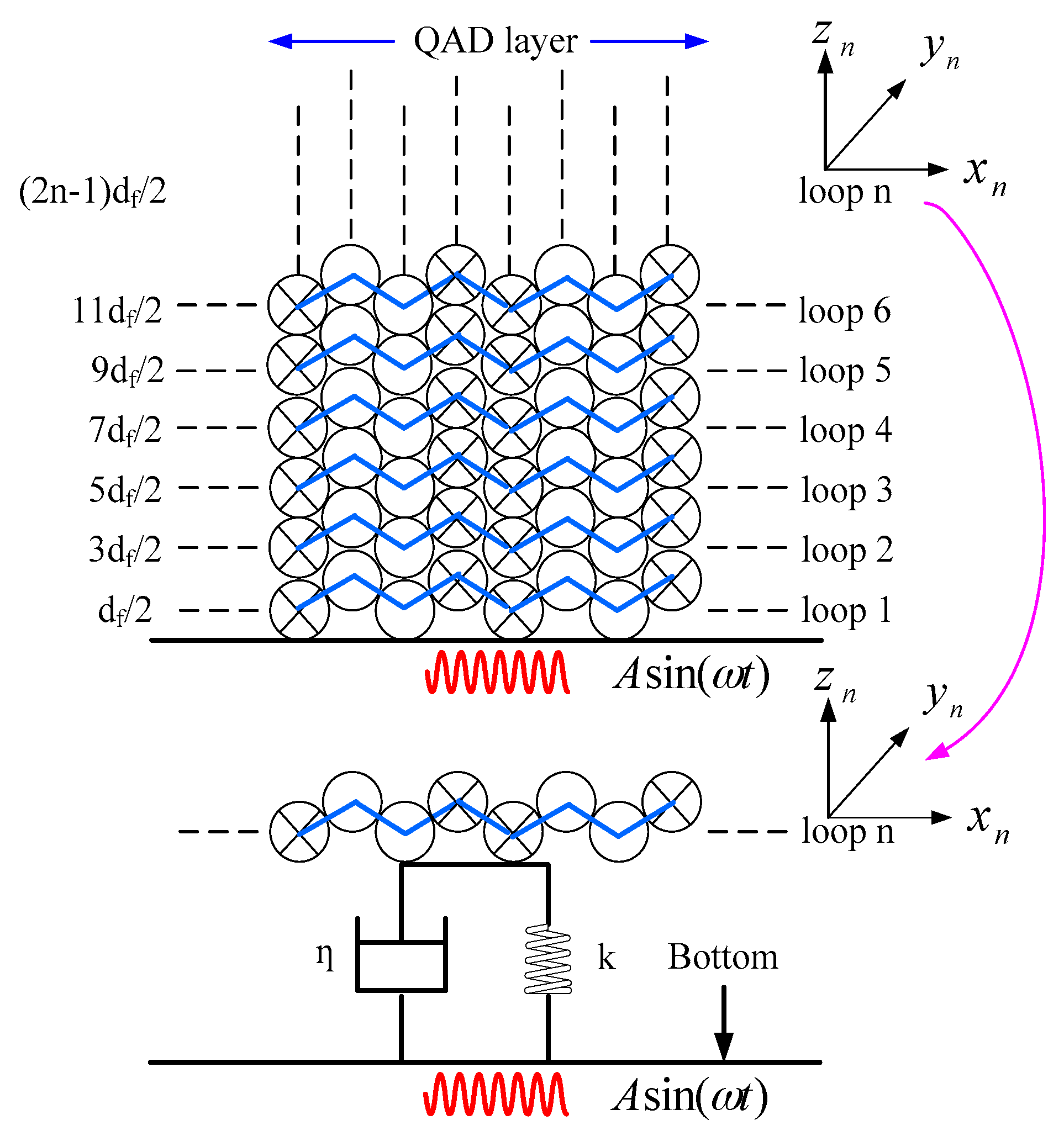
For a QAD coil with layers number
M and loops number
N, the index of each layer and each loop could be denoted by
m (
m = 1, 2 …
M) and
n (
n = 1, 2 …
N). The diameter of the fiber is denoted by
. The dynamic model to illustrate the movement of each loop caused by vibration is shown in
Figure 6. To facilitate the analysis, a local coordinate system is established in each loop and the displacement along vibration direction is denoted by
. In this model, each fiber loop is regarded as a mass-spring-damper system with stiffness coefficient
k and damping coefficient
η. Here,
η is a constant for the fiber, while
k is different in terms of the distance to the coil bottom. The relationship between fiber stress
and fiber strain
is
We assume that fibers in
Figure 6 are modeled as close-packed with adhesive filling the interstitial volume. In this case, the coil area is calculated by
. Hence, the stiffness coefficient
k in loop
n is given as
where
R1 and
R2 are inner radius and outer radius of the fiber coil, respectively, and
E is elastic modulus of the fiber.
Considering that the relative velocity and relative displacement between fiber loop
n and the coil bottom are described as
and
, the motion equations of fiber loop
n is given in Equation (8). Here,
is the coil mass and
is the mass of each loop.
Equation (8) could be rewritten as Equation (9) after rearrangement and being divided by
.
In the above equation,
is the natural resonant frequency, which is usually more than one magnitude larger than
; and
is the damping ratio. It is clearly seen that
and
are both determined by loop number
n. The solution to Equation (9) is given in Equation (10).
where
and
. Since the second term of Equation (10) will attenuate rapidly after a short period time, the steady state solution of Equation (9) will be the first term of Equation (10). Therefore, the force acting upon coil loop
n under vibration is described as Equation (11), which is different in different
n and
.
In order to calculate the nonreciprocity phase shift induced by vibration, the whole fiber coil is divided into
M ×
N segments, and the length of each segment
based on the cross section of the coil present in
Figure 6 is given in Equation (12). In this equation,
is the index of each QAD layer,
is the index of each segment.
According to the material mechanics, the stress employed in each segment should be the force divided by coil area, as shown in Equation (13). The relationship between the index of each loop
and the index of each segment
are also given in Equation (13).
Depending on
Figure 4b and Equation (13), the vibrational strain induced by mechanical vibration can be written as
In Equation (14),
is elastic modulus of the fiber versus tensile strain
plus vibrational strain
in segment
,
is discrete step in time domain, and
is Poisson’s ratio of the fiber. Therefore, the overall strain in vibrational condition will be the summation of tensile strain and vibrational strain, that is
The light with wavelength
will have a phase shift
after passing through a fiber with length
and refractive index
, i.e.,
. In vibrational condition, the length and the refractive index of the fiber coil in segment
will change, as described by Equations (16) and (17) [
16], and the corresponding phase shift can be described by Equations (18).
where
and
are photoelastic coefficients of the fiber and
. Note that the last term of Equation (18) is ignored since it is very small as compared with the former three terms. Substituting Equation (13) into Equations (14) and (15), Equation (18) could be rewritten as Equation (19). Note that we only consider the situation
, which means
exists
Depending on Equation (19), the light will have a phase shift
and
after passing through the whole optical path in clockwise and counterclockwise directions respectively, as described by Equations (20) and (21). In this case, the equivalent rate error of IFOG induced by mechanical vibration can be calculated by Equation (22) according to Sagnac effect.
where
is velocity of the light in vacuum,
is mean diameter of the fiber coil, and
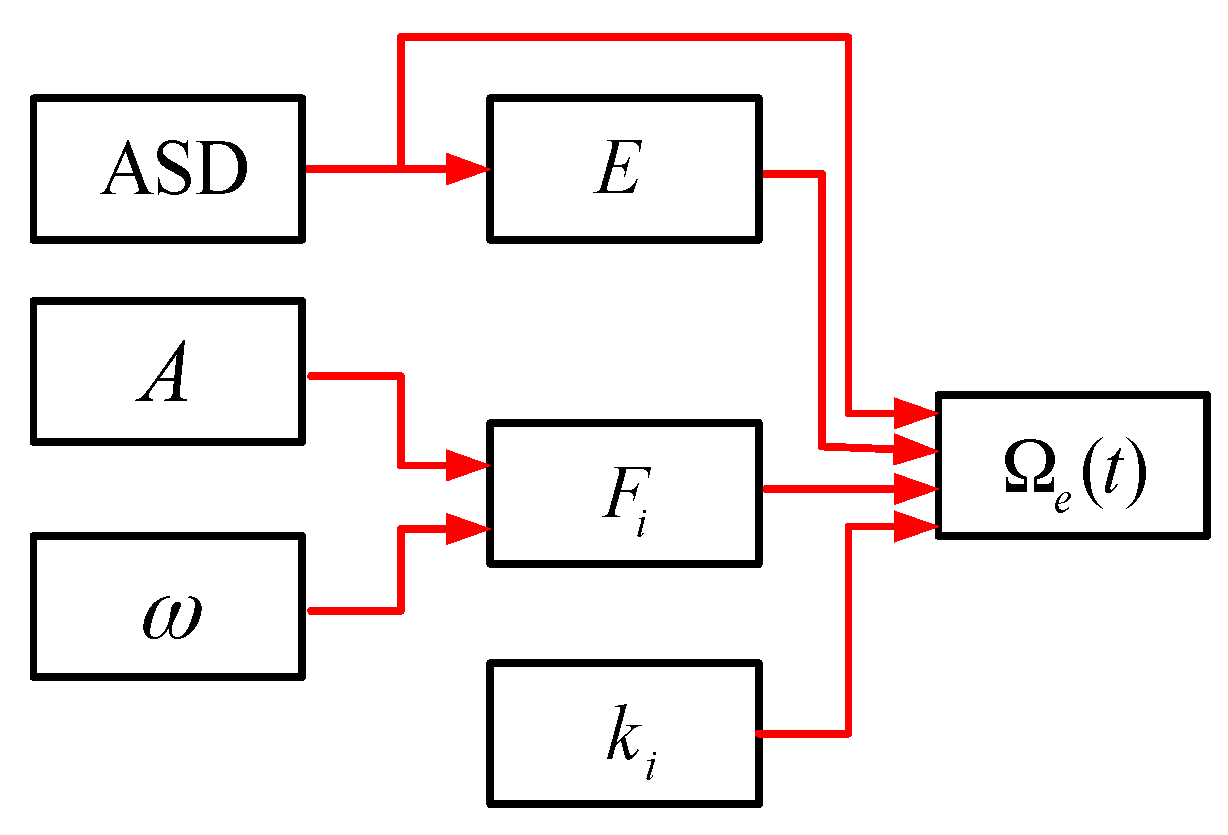
is the length of the coil. For further analysis and discussion, the definition of asymmetry of strain distribution (ASD) is given in Equation (23). According to the definition, ASD has no unit and can be used as a specification to evaluate the winding quality of the fiber coil. The lower ASD, the better the coil will be. We can see from Equation (11) to Equation (22) that the vibration error
is determined by the factors that illustrated in
Figure 7.
Based on
Figure 7, we can see that the vibration error
is determined by internal factors include
,
and
, as well as external factors include
and
. For a given vibration condition,
can be significantly suppressed if the fiber strain satisfies Equation (24) as follows (i.e.,
). Besides,
can also be suppressed effectively if the fiber elastic modulus
keeps constant or varies slightly in the whole range of the fiber strain (i.e., less than 3000 μ in
Figure 4), as shown in Equation (25). However, it should be pointed out that the parameter in each loop
is asymmetrical with respect to the coil center since the characterization of QAD pattern. Hence, the residual errors will exit even when the coil fully meet Equation (24), as will be seen from the simulation result in
Section 4.
4. Computation
Geometric parameters and material properties of the fiber coil for theoretical computation are listed in
Table 1 and
Table 2 [
6,
16], respectively.
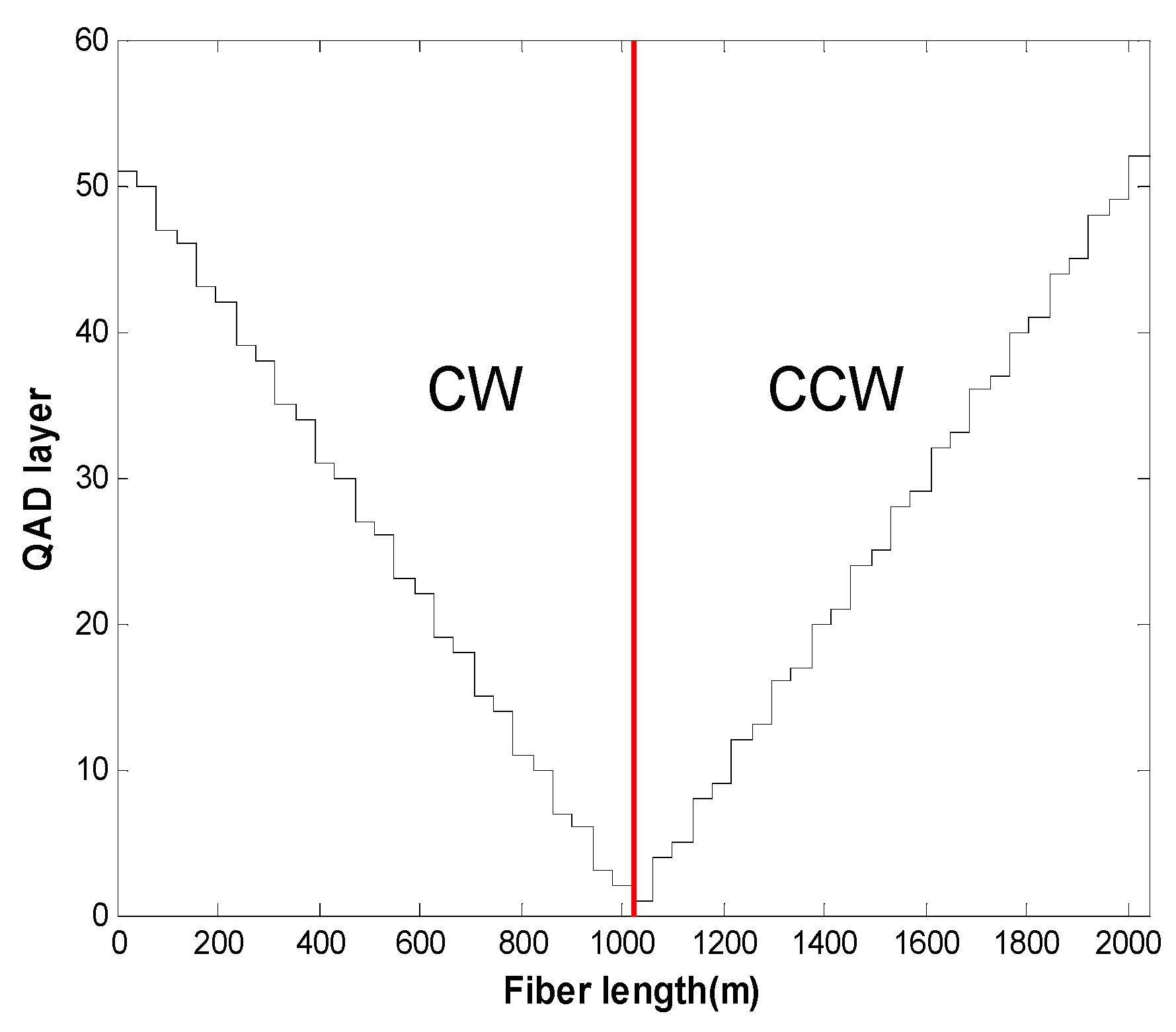
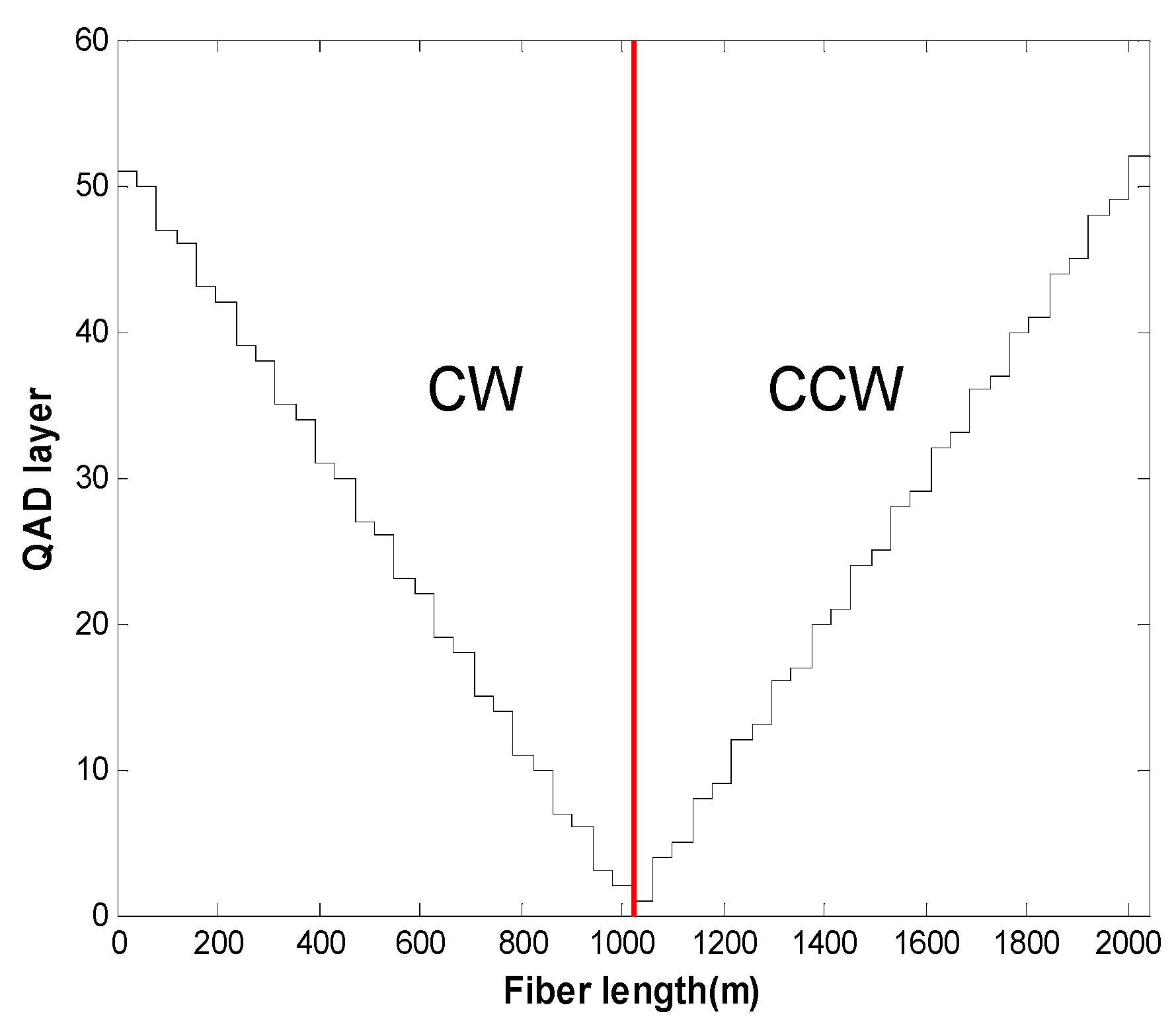
Figure 8 shows the standard representation of the QAD fiber coil, where CW and CCW refer to the fiber layer wound in clockwise and counterclockwise directions.
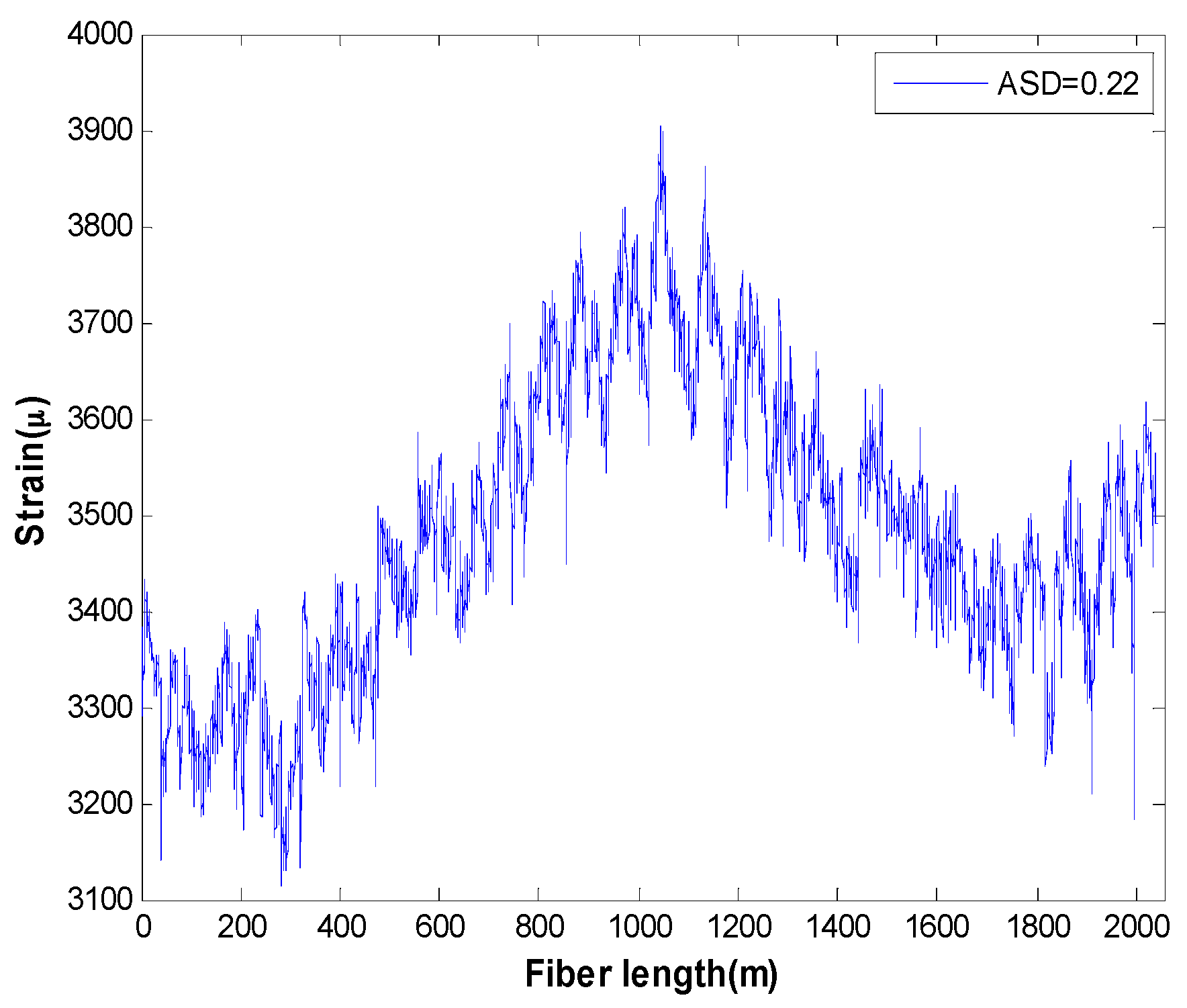
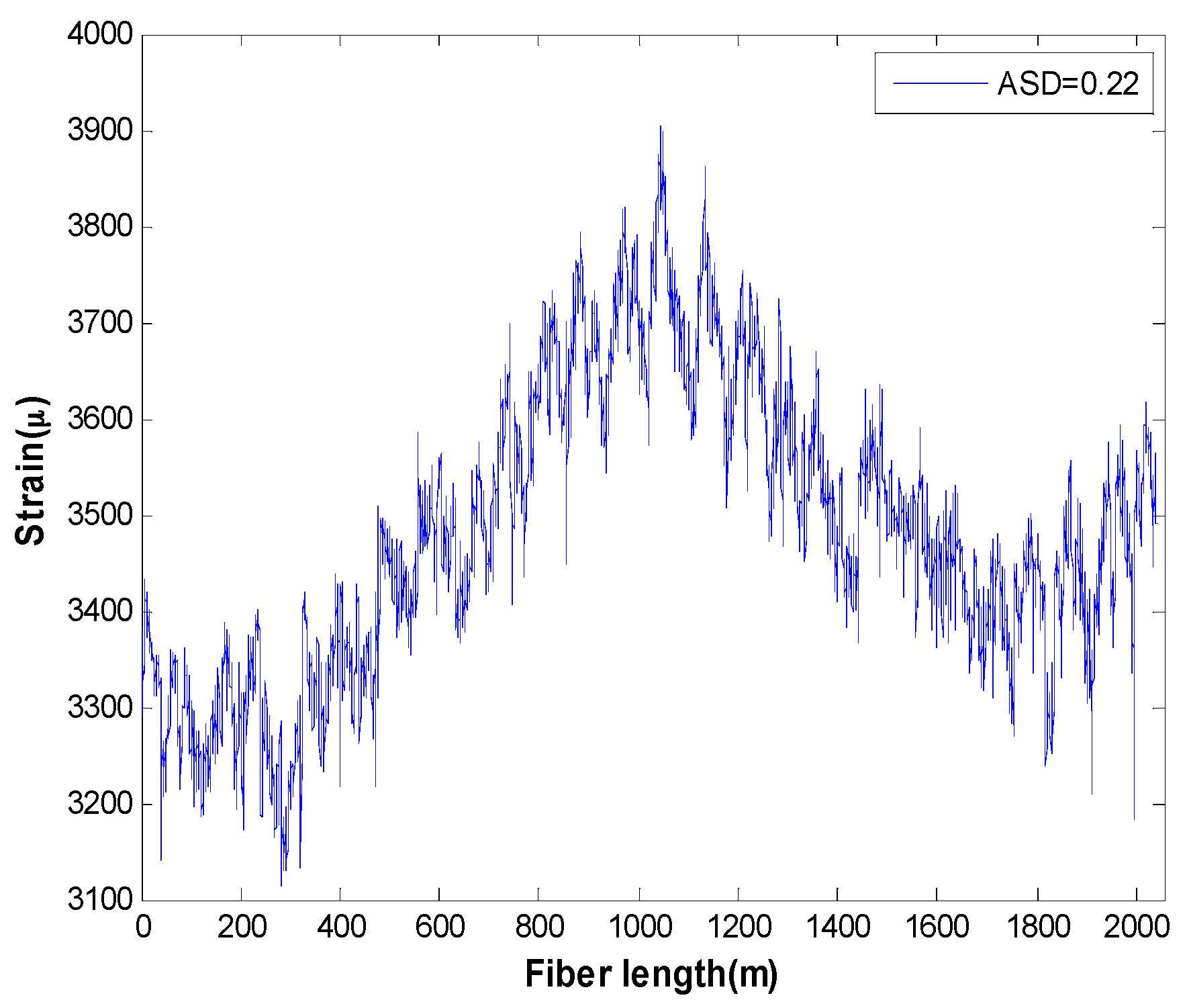
Considering that the computation of the model is based on the measurement data of the fiber strain, a stress analyzer NBX6055PM produced by Neubrex Corporation is utilized to obtain the strain distribution of the fiber coil, as shown in
Figure 9. The sampling interval of the stress analyzer along the fiber coil is 5 cm.
Figure 9 clearly reveals that the strain distribution is asymmetrical with respect to the midpoint of the fiber coil due to imperfect winding. In this case, the specification
is essential to evaluate the asymmetry of the coil, and the calculated result in terms of Equation (23) is 0.22.
As aforementioned, the vibration error
is mainly dependent on
,
and
. Therefore, the undesired error of IFOG induced by vibration is actually described by the function as follows. Based on Equation (26), the simulations are performed according to different parameters,
,
and
.
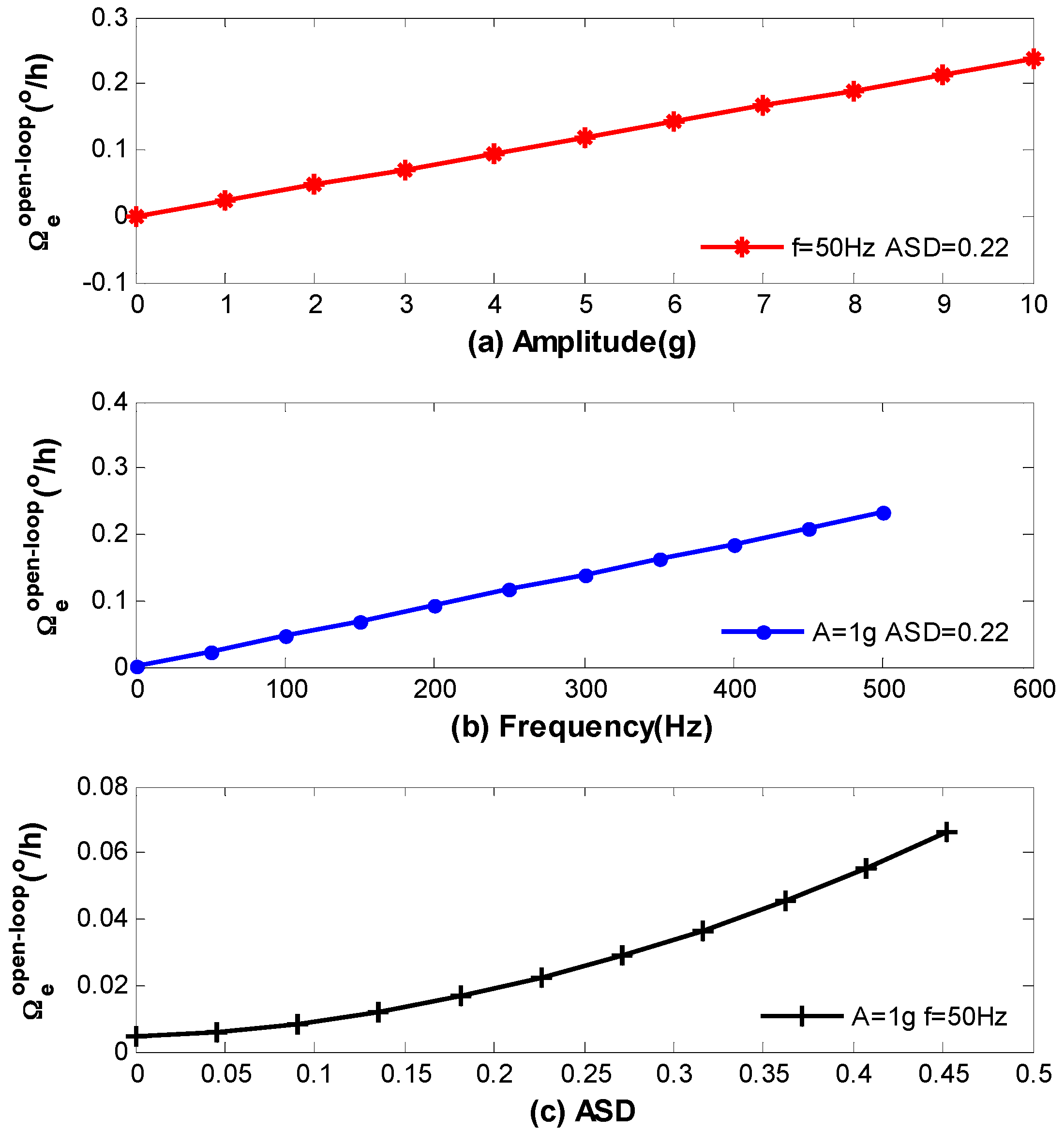
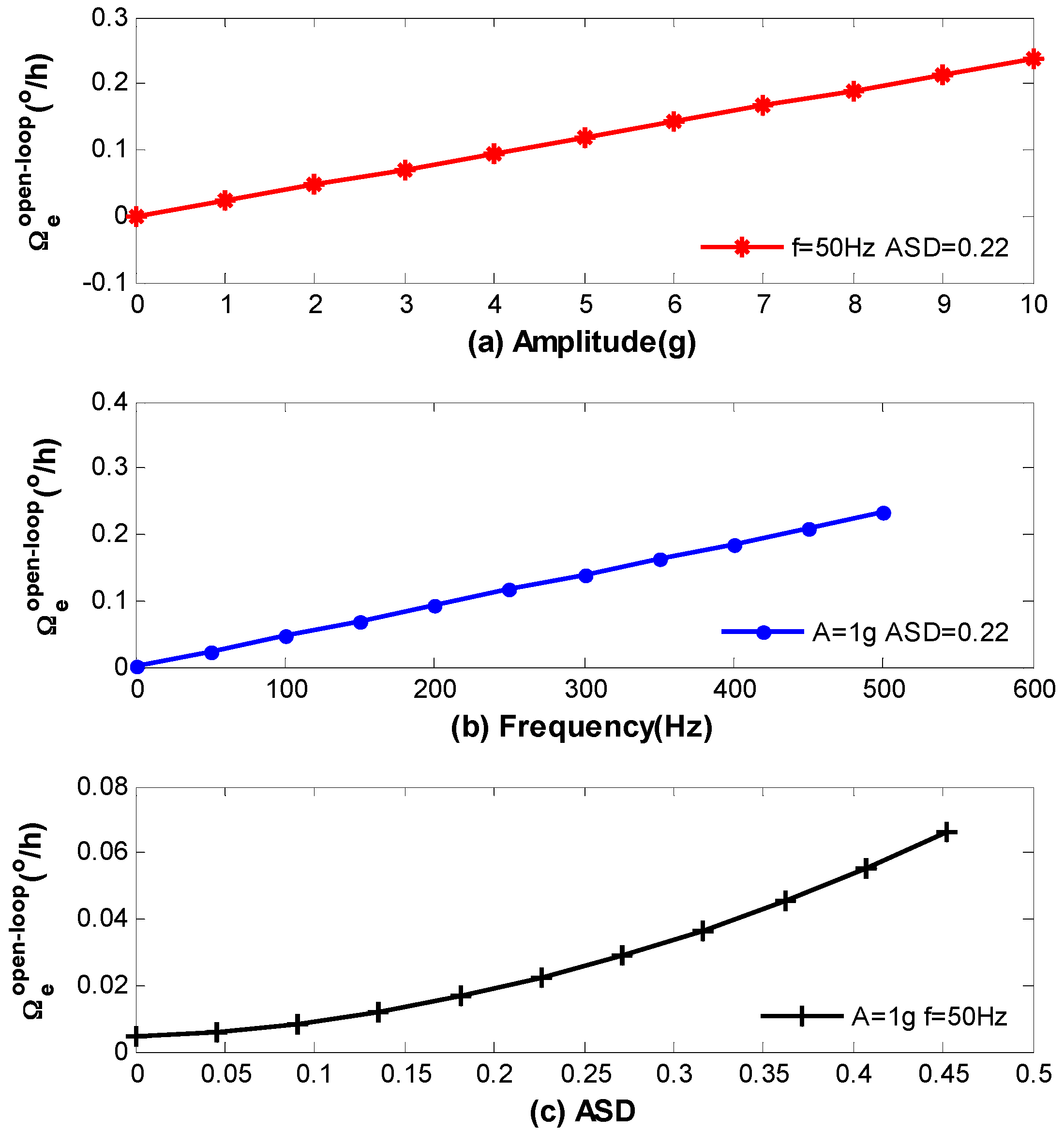
Firstly, the open-loop vibration error is calculated through Equations (3)–(22), that is Equation (28) as follows, and the computational results are present in
Figure 10. Here, the vibration amplitudes in
Figure 10a range from 0 g to 10 g, the vibration frequency is fixed at 50 Hz, and the strain in the coil is shown in
Figure 9 with
. The vibration frequencies in
Figure 10b range from 0 Hz to 500 Hz, the vibration amplitude is fixed at 1 g, and the strain in the coil is also shown in
Figure 9 with
.
To simulate the relationship between
and different
in
Figure 10c, we assume the strain in the coil from starting point to midpoint is identical with
Figure 9, while the strain from the ending point to midpoint is given in Equation (27).
where
, and the corresponding
can be obtained in terms of the definition in Equation (23). The vibration amplitude and frequency are fixed at 1 g and 50 Hz respectively.
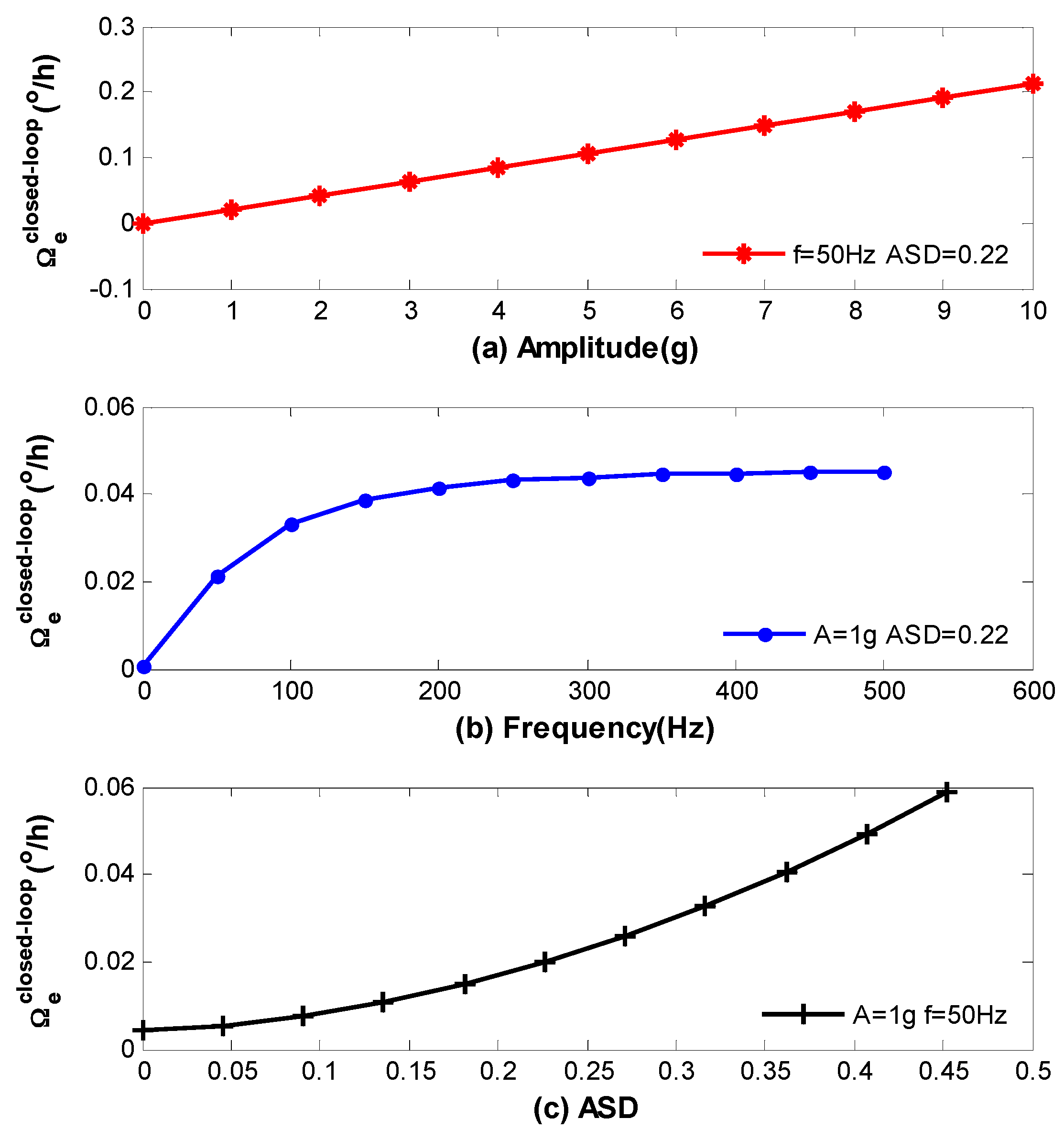
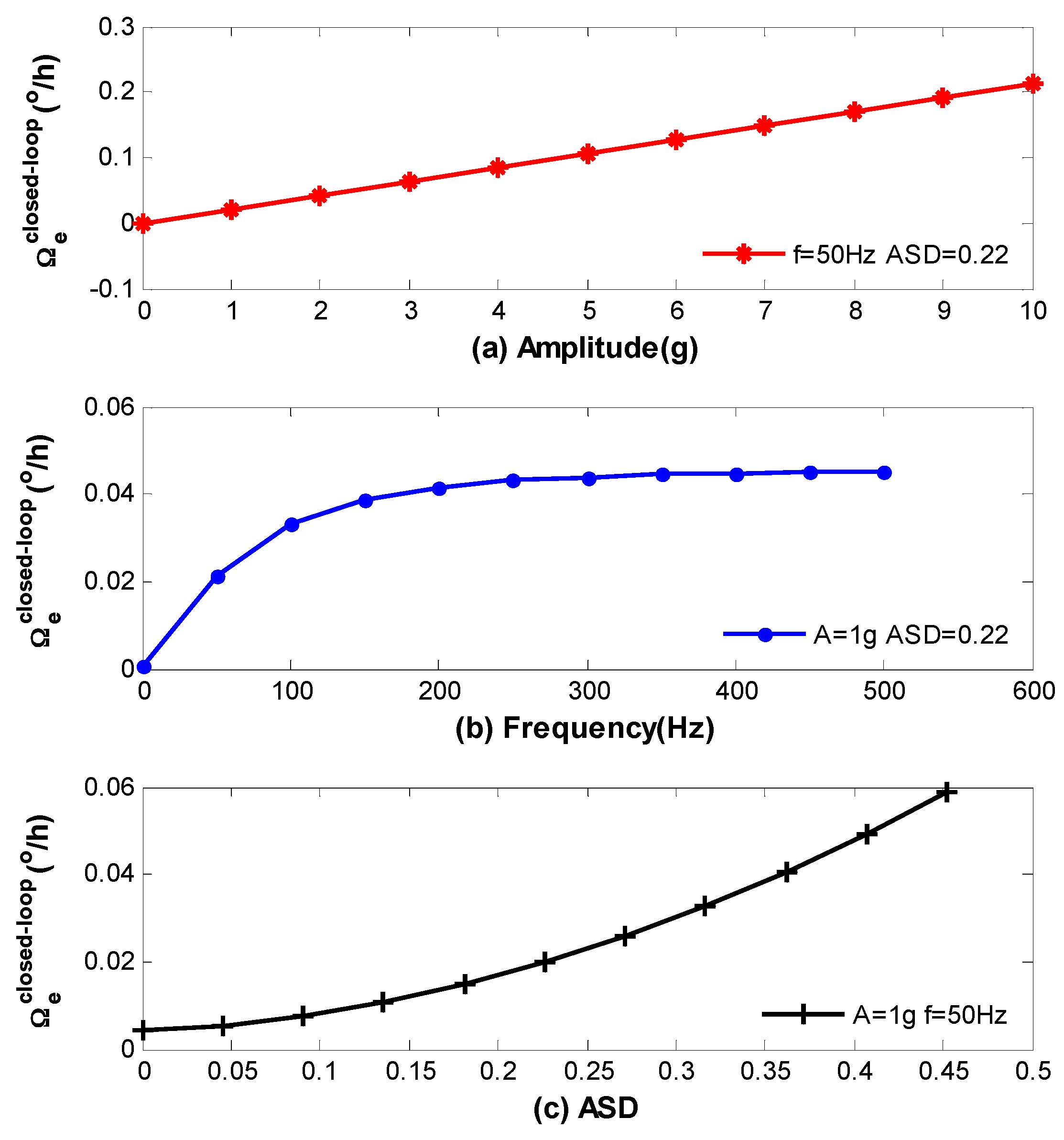
Secondly, the closed-loop vibration error is achieved through Equations (1) and (28) as described by Equation (29) as follows, where
denotes Laplace inverse transformation, and the results are present in
Figure 11. It should be noted that the computational results of Equations (28) and (29) are present in the form of sinusoidal function, which has the same frequency with vibration.
Figure 10 and
Figure 11 only show the standard deviation of the errors.
We can see from the above figures that vibration errors in both open-loop and closed-loop IFOG increase with the raise of
,
and
. However, there are still residual errors in
Figure 10c and
Figure 11c when
. As has been discussed before, this is because the coefficient
in each loop is asymmetrical with respect to the coil center due to the characterization of QAD pattern. Moreover, some model’s error may exit which can affect theoretical values in
Figure 10 and
Figure 11. The reasons are parameters in
Table 1 and
Table 2 are not fully accurate and the strain distribution shown in
Figure 9 could be influenced by temperature. Nevertheless, the results are, to some extent, consistent with the experimental measurements in [
11].
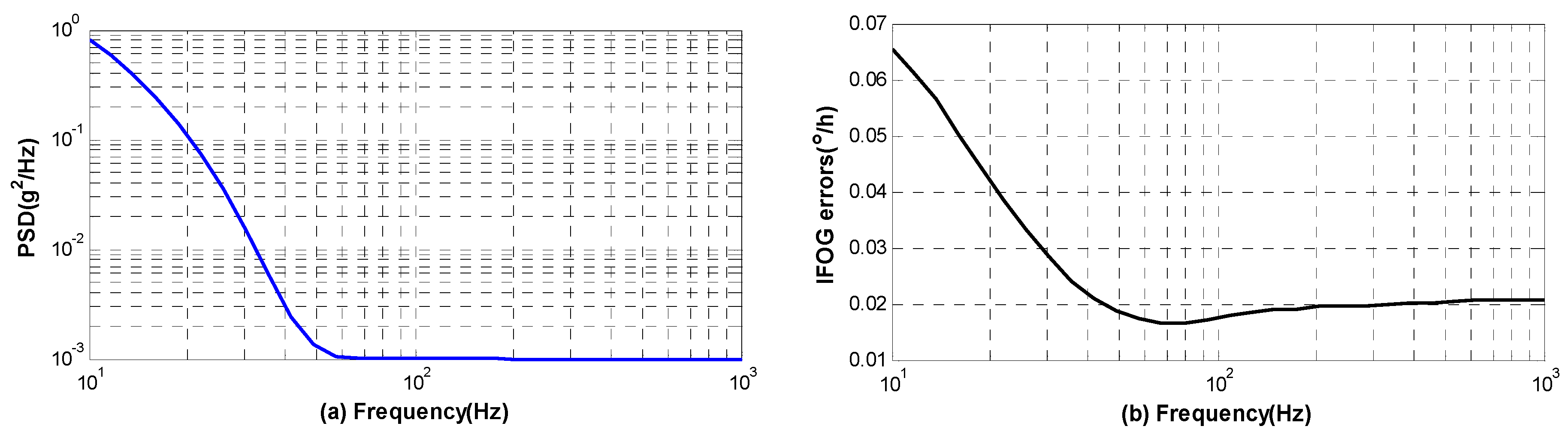
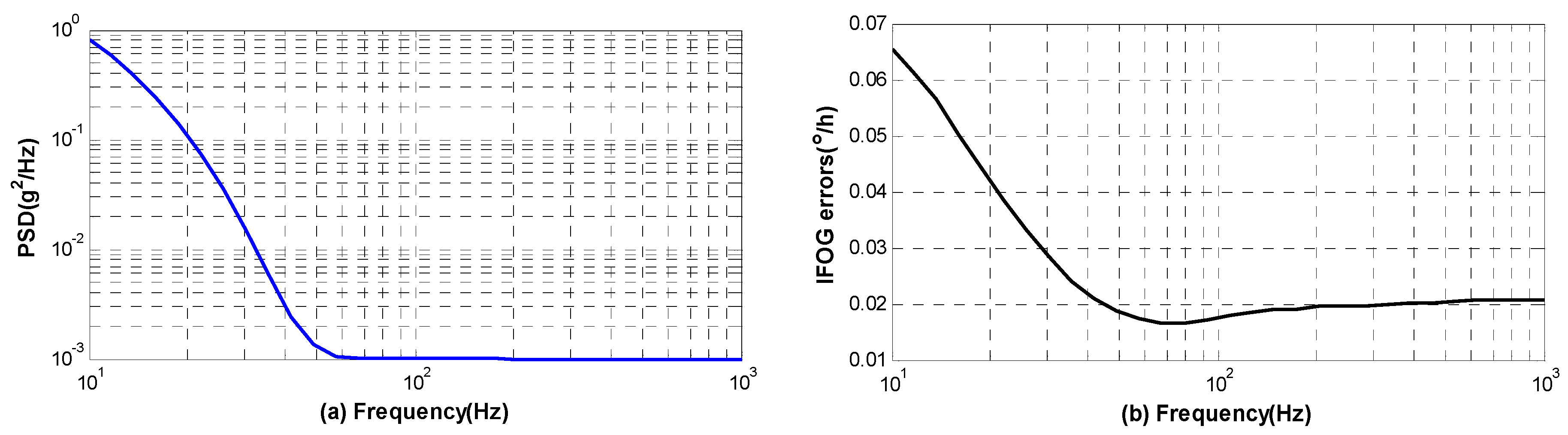
To provide a quantitative estimation of the performance of IFOG in an environment with high level vibration, the errors of IFOG are computed based on the model under the power spectral density (PSD) that obtained by accelerometers mounted in NASA F-15B aircraft [
17]. As has been studied in [
17], the lateral axis acceleration was found to be dominant for most of the flight conditions. Hence, we will simulate the vibration in lateral direction when the aircraft takeoff. The PSD between 10 Hz and 1 kHz is plotted in
Figure 12 with blue line and the corresponding vibration errors are also plotted with black line. To facilitate the calculation based on the mathematical model, we firstly calculate root mean square (RMS) of vibration amplitude in each frequency according to PSD, and then the random vibration could be transformed into the deterministic signal.
The result indicates that vibration errors are mostly generated by low-frequency vibration between 10 Hz and 60 Hz, and the largest error in IFOG is approximately 0.065°/h. Moreover, the total value of vibration error is about 0.12°/h by integrating the PSD. In this case, it is essential to improve the mechanical design of gyro to isolate the vibration between 10 Hz and 60 Hz. This will be meaningful to achieve a better navigation precision when the aircraft takeoff.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}