
Distributed Task Offloading in Heterogeneous Vehicular Crowd Sensing



Abstract
:1. Introduction
2. Related Work
3. System Model
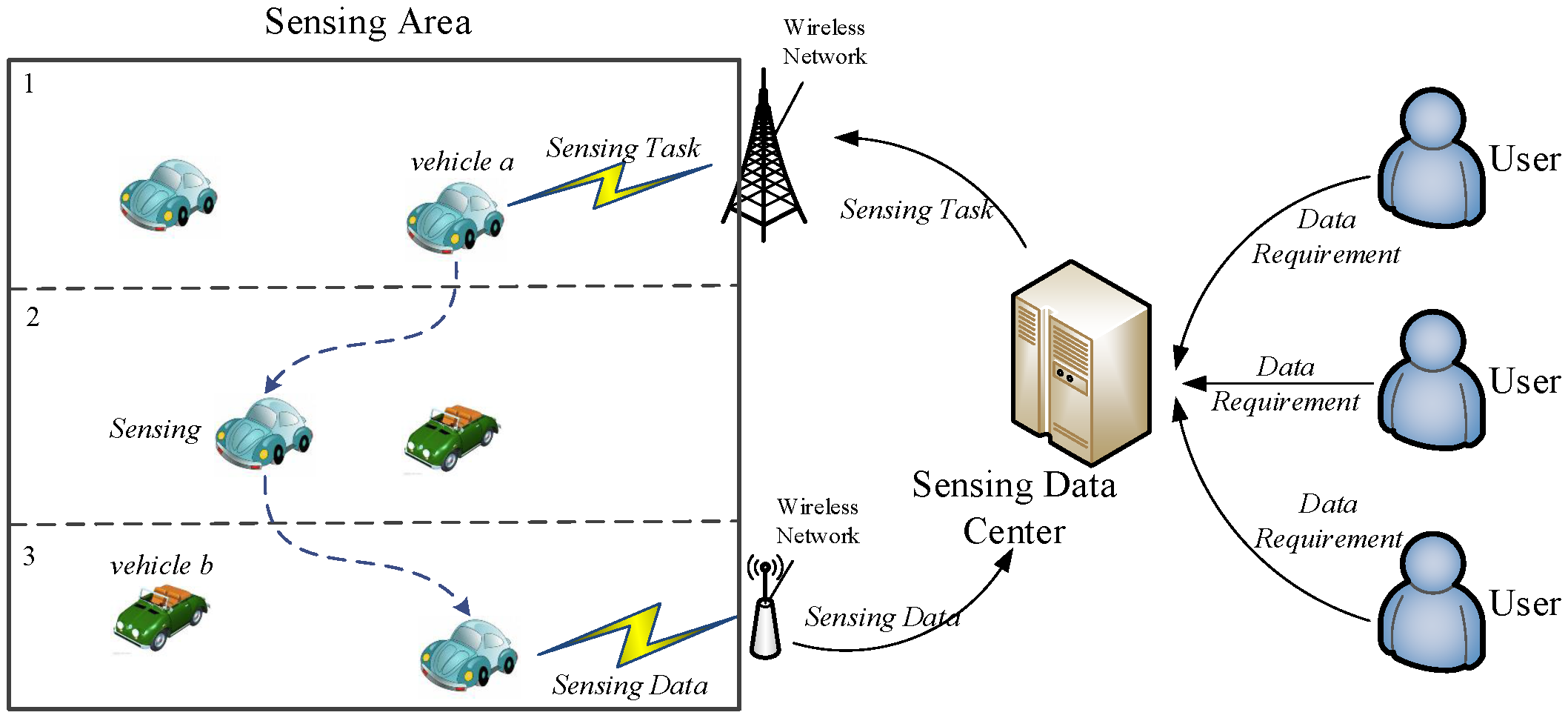
3.1. System Architecture
3.2. Sensing Data Model
3.3. Mobility Model
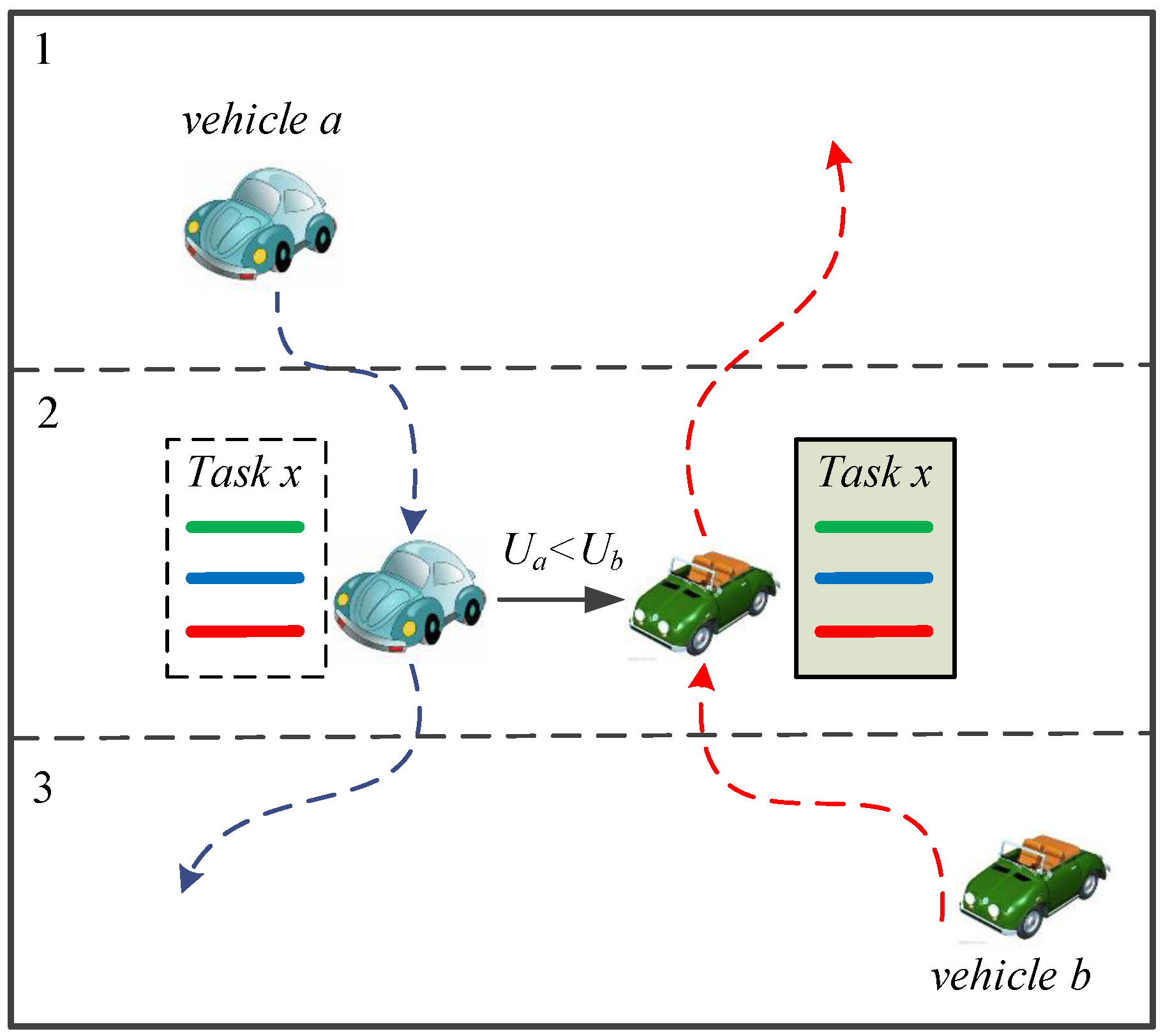
4. Sensing Task Offloading
4.1. Sensing Task Decomposition
4.2. Distribution of Residence Time
4.3. Distribution of Arrival Time
4.4. Distributed Task Offloading
| Algorithm 1: Distributed Sensing Task Offloading Algorithm |
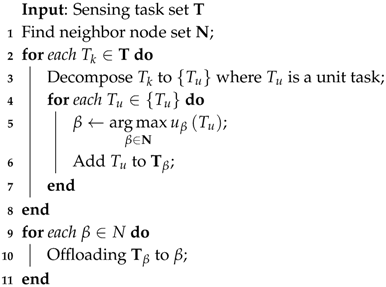 |
5. Experimental Section
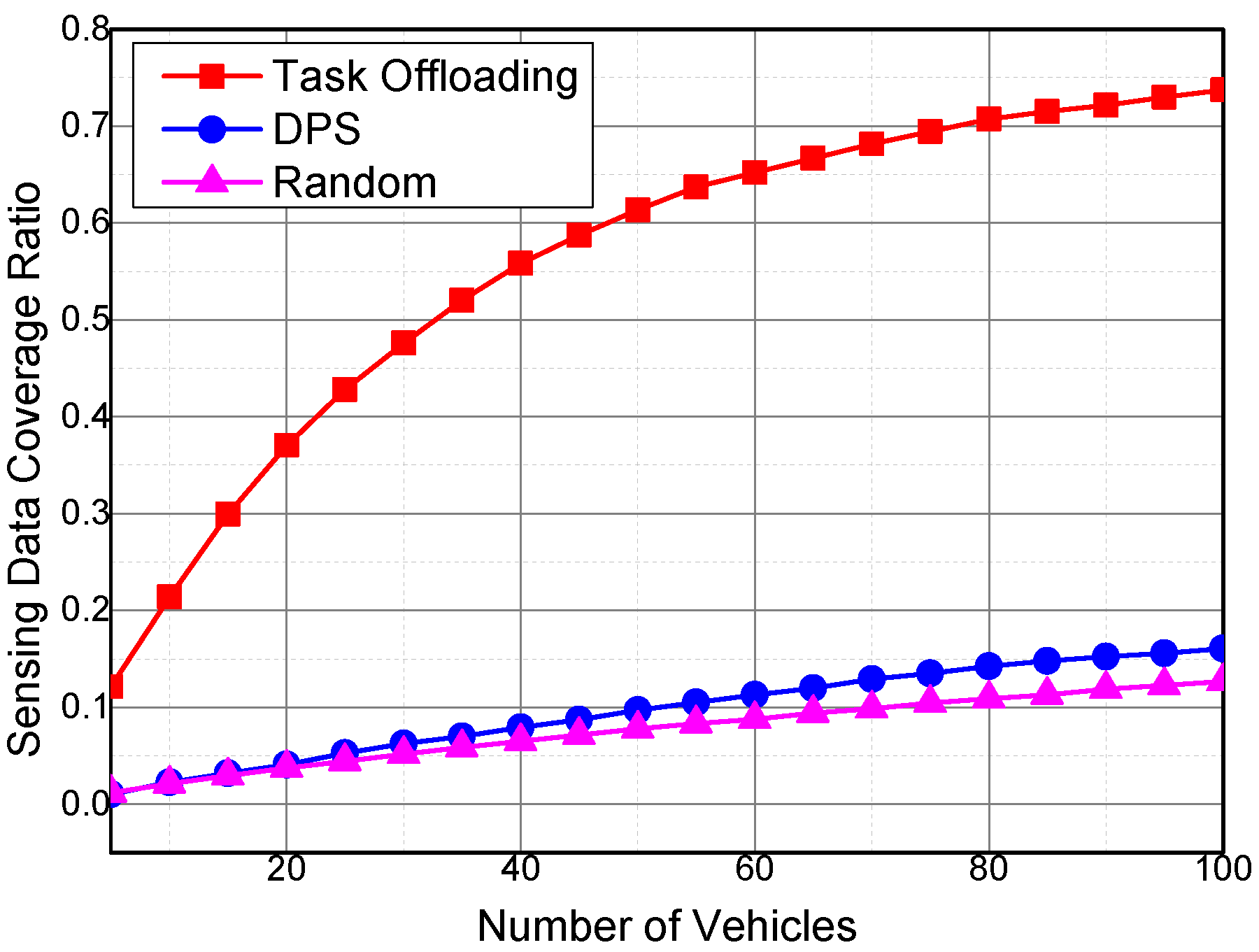
5.1. Results
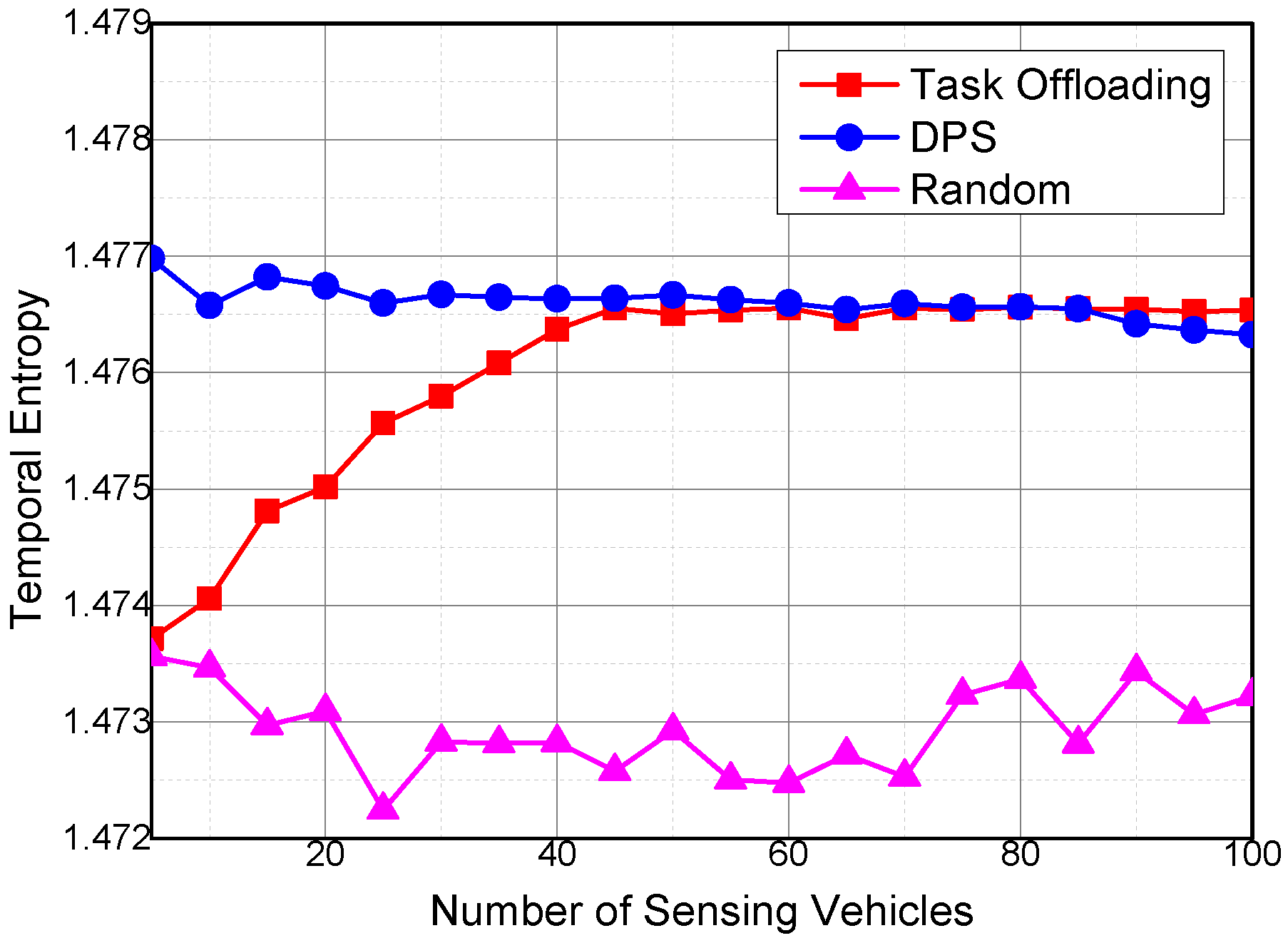
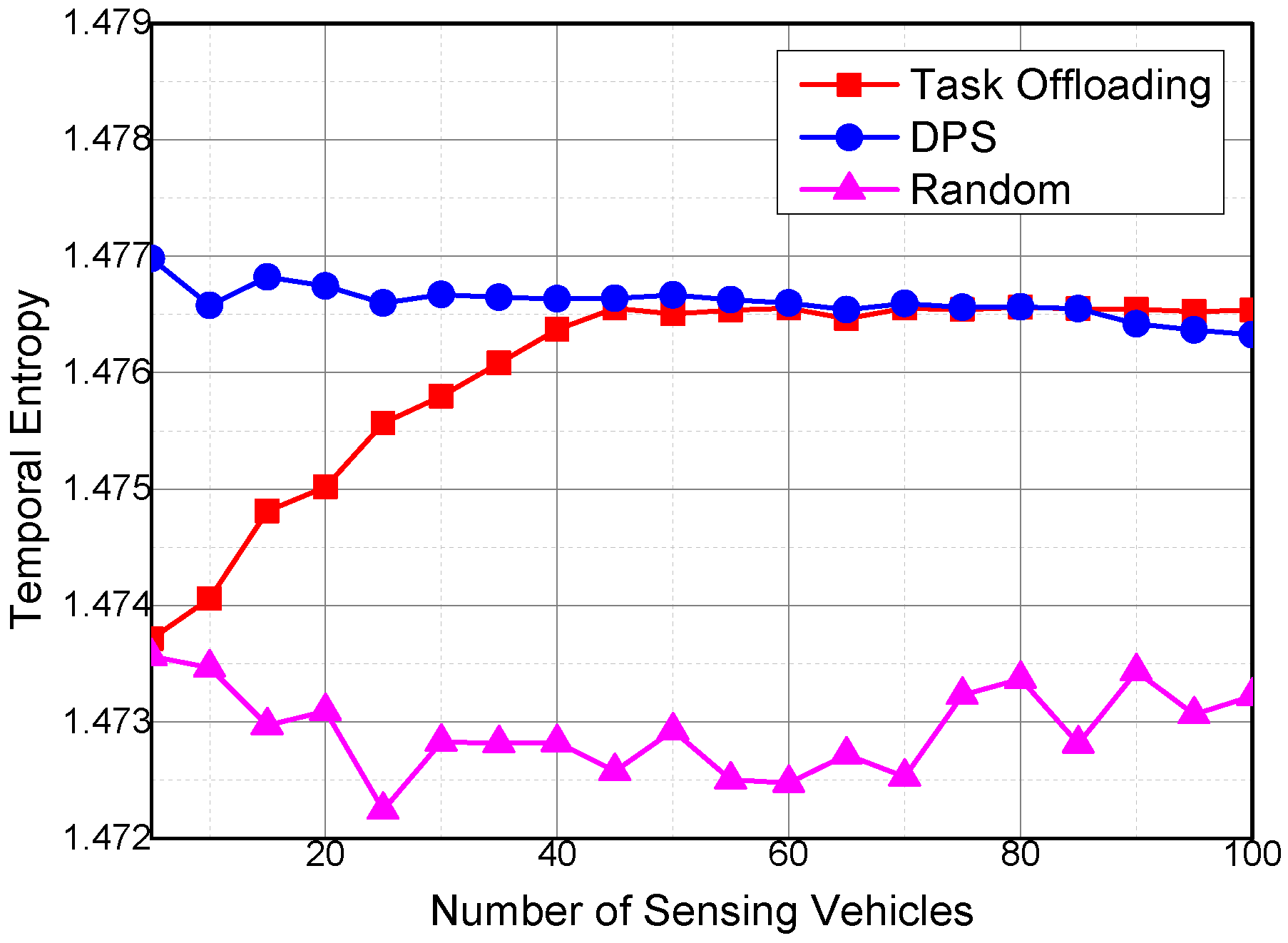
5.1.1. Impact of the Number of Selected Vehicles
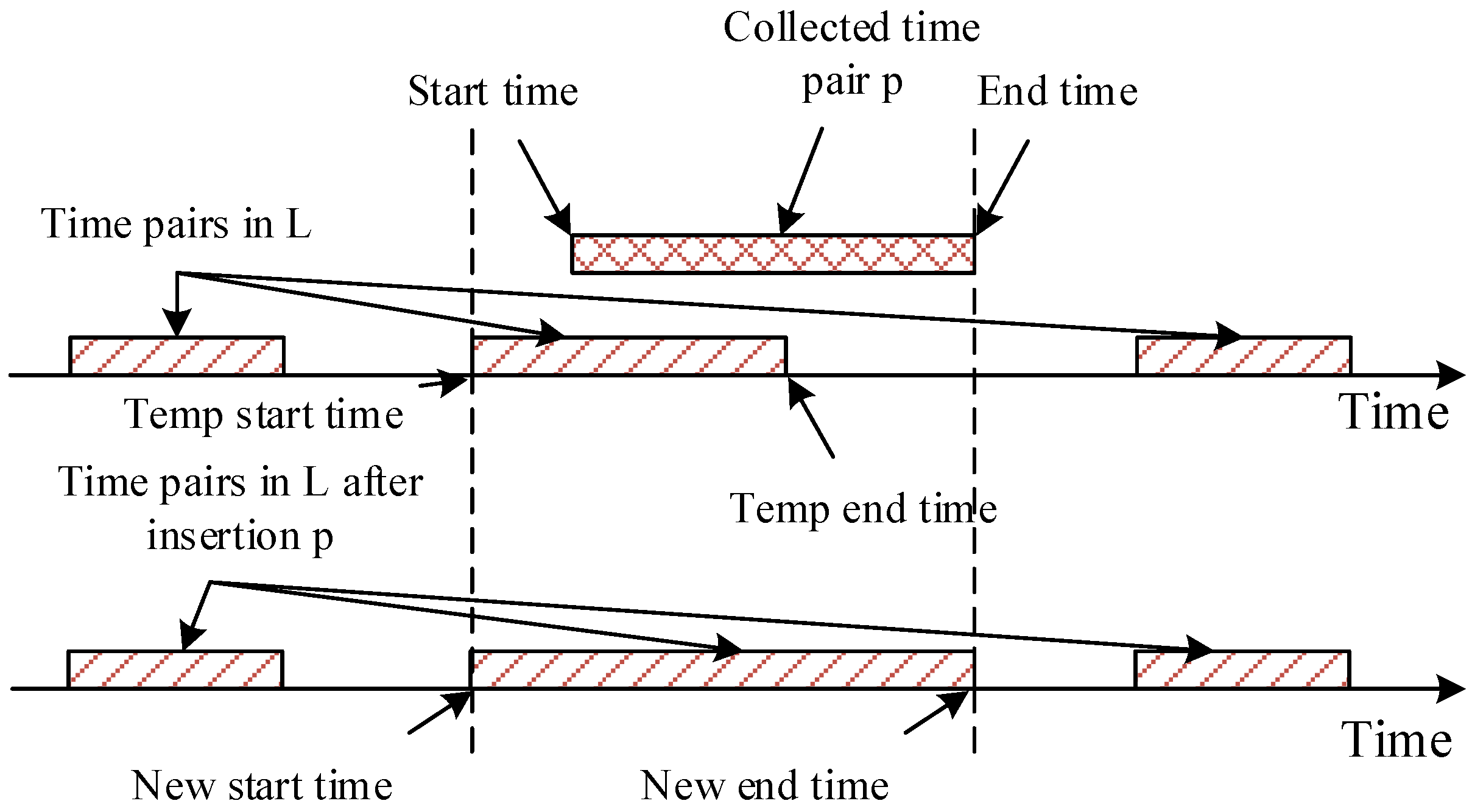
| Algorithm 2: Time Pair Insertion Algorithm |
 |
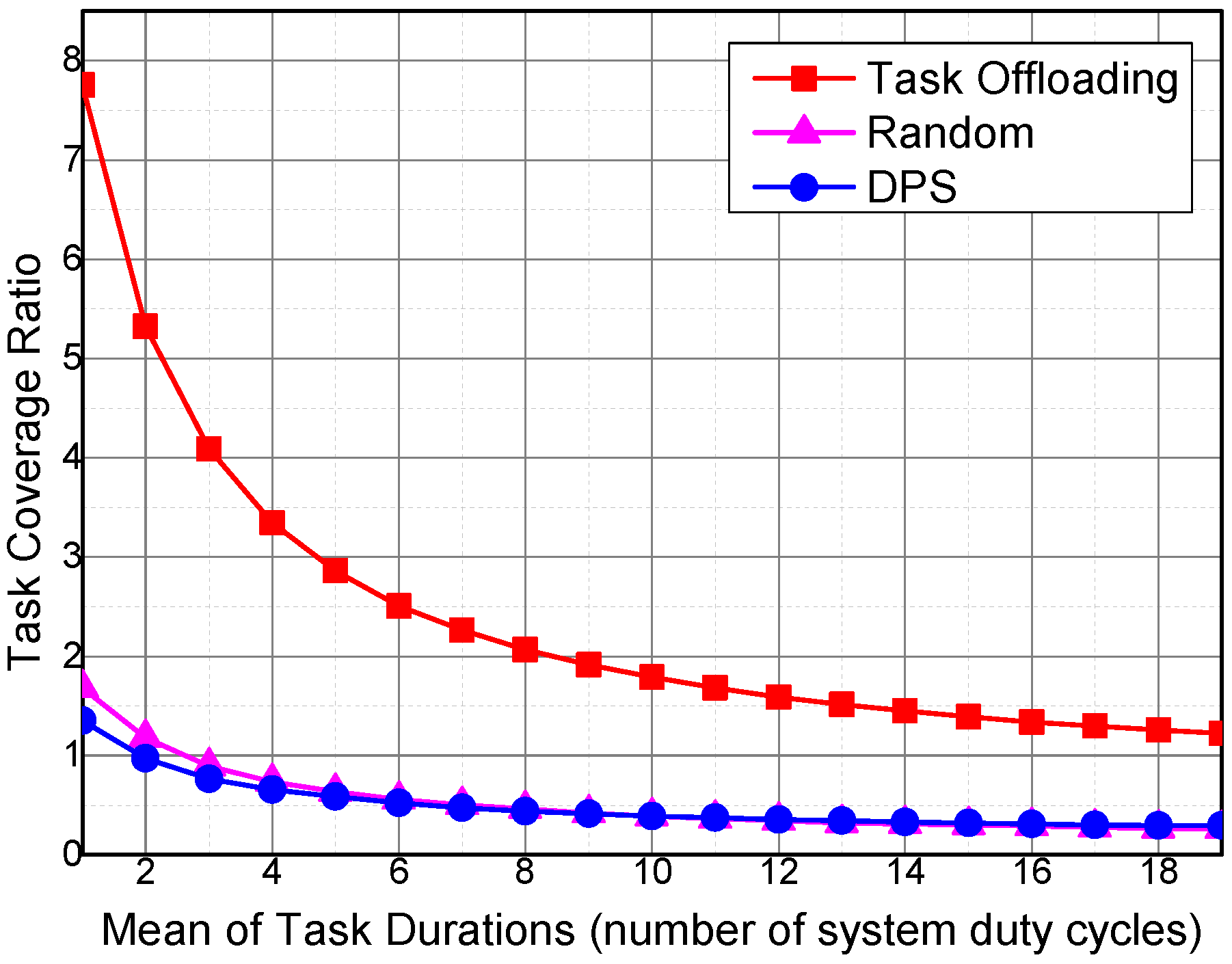
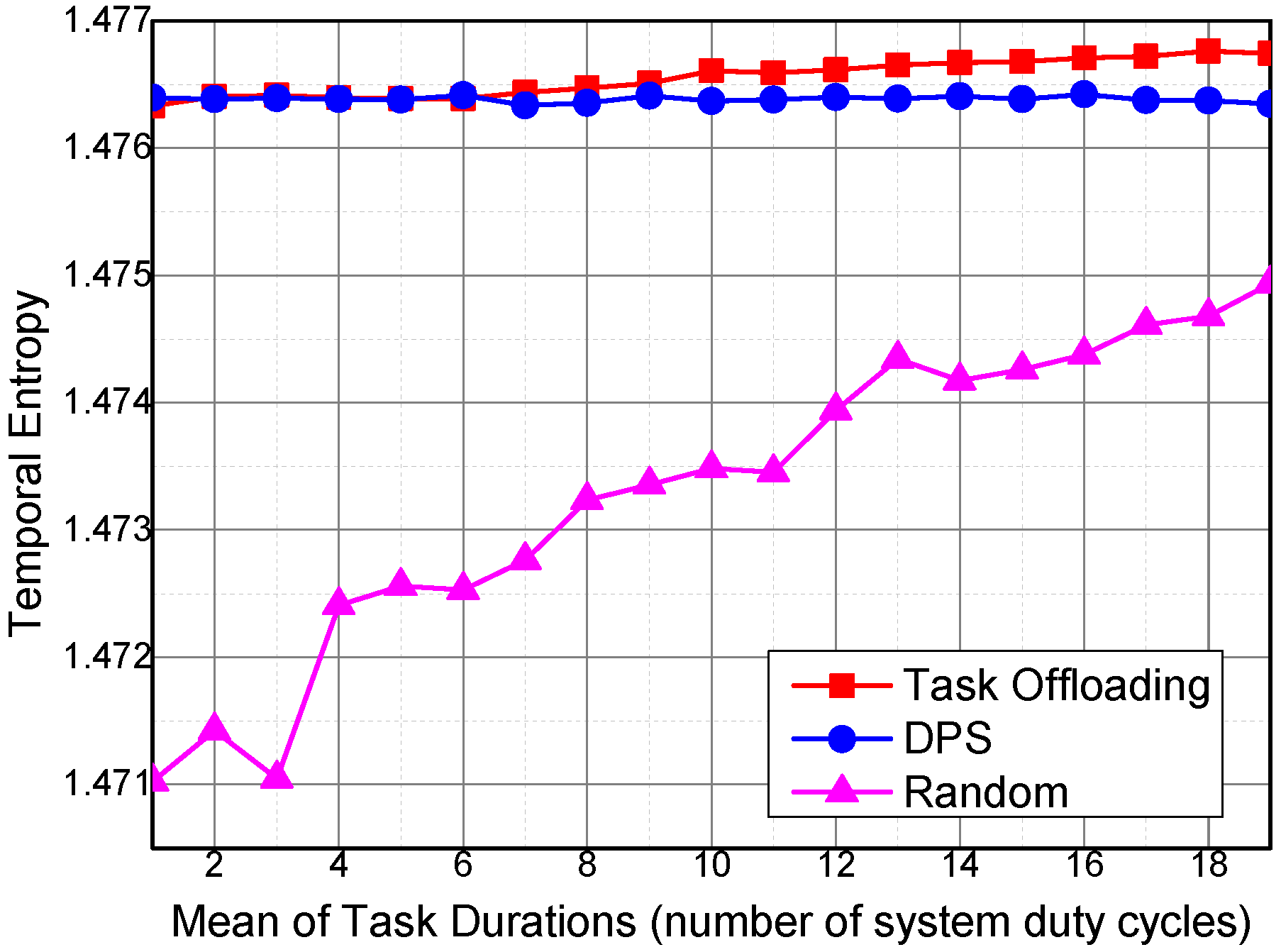
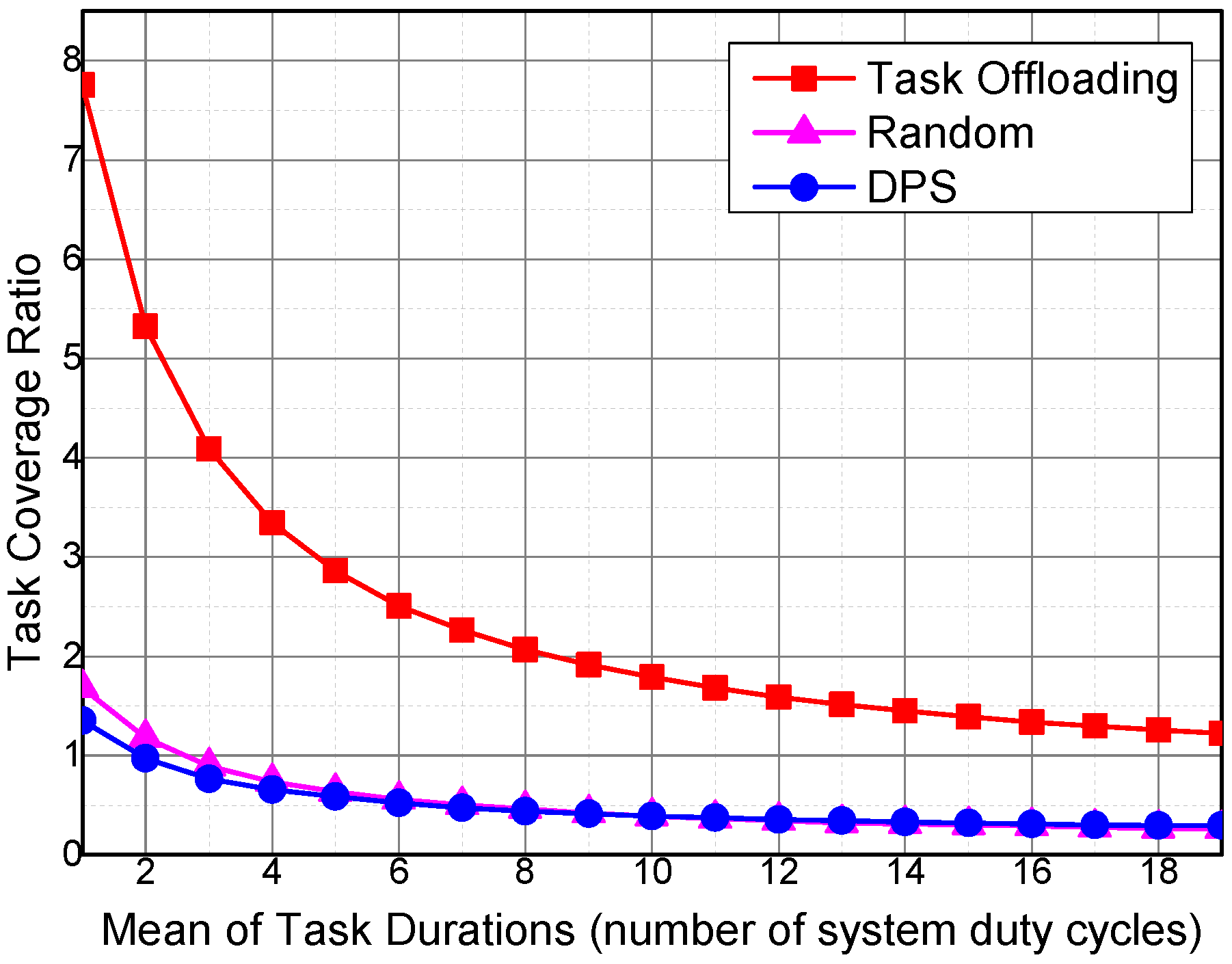
5.1.2. Mean Value of Task Durations
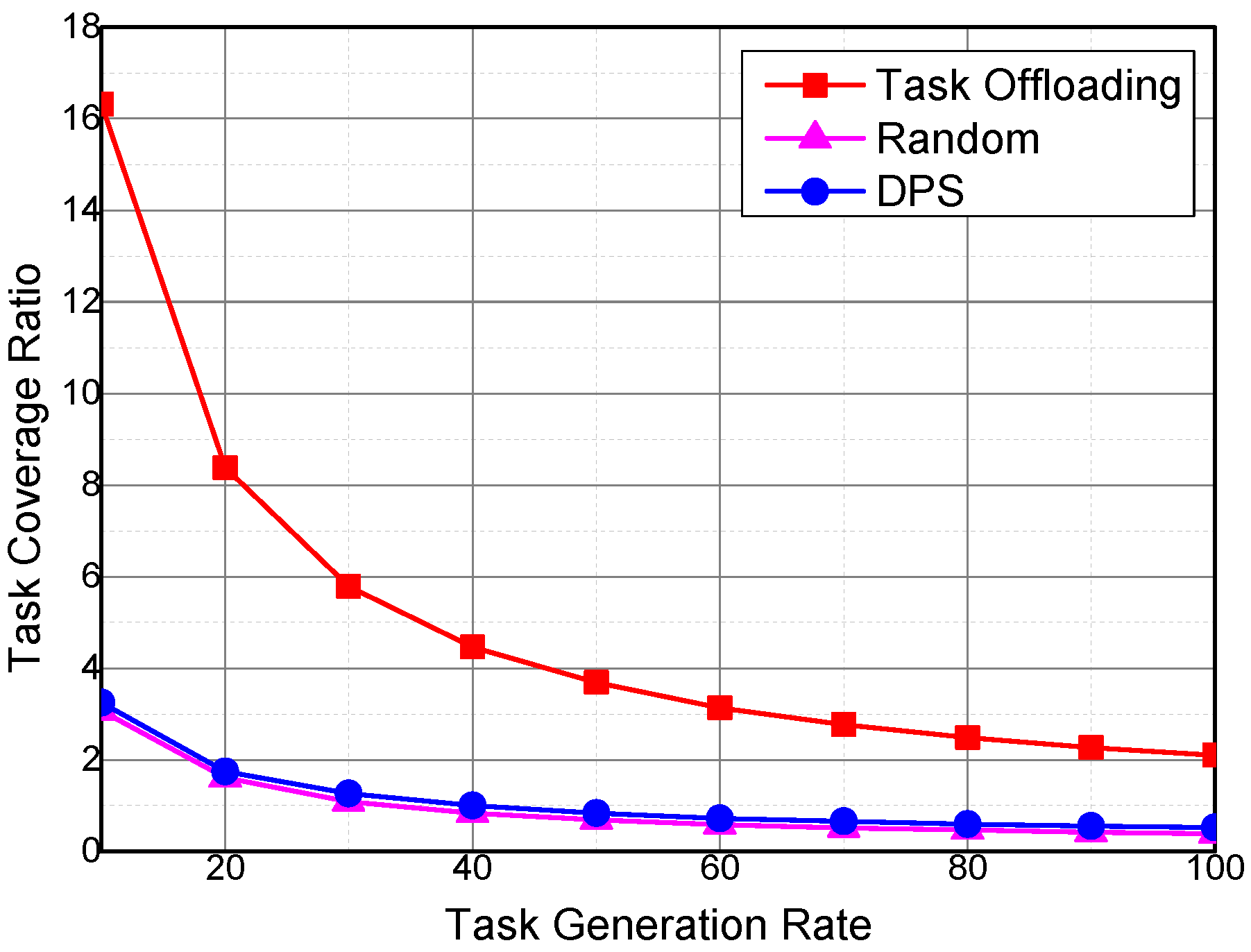
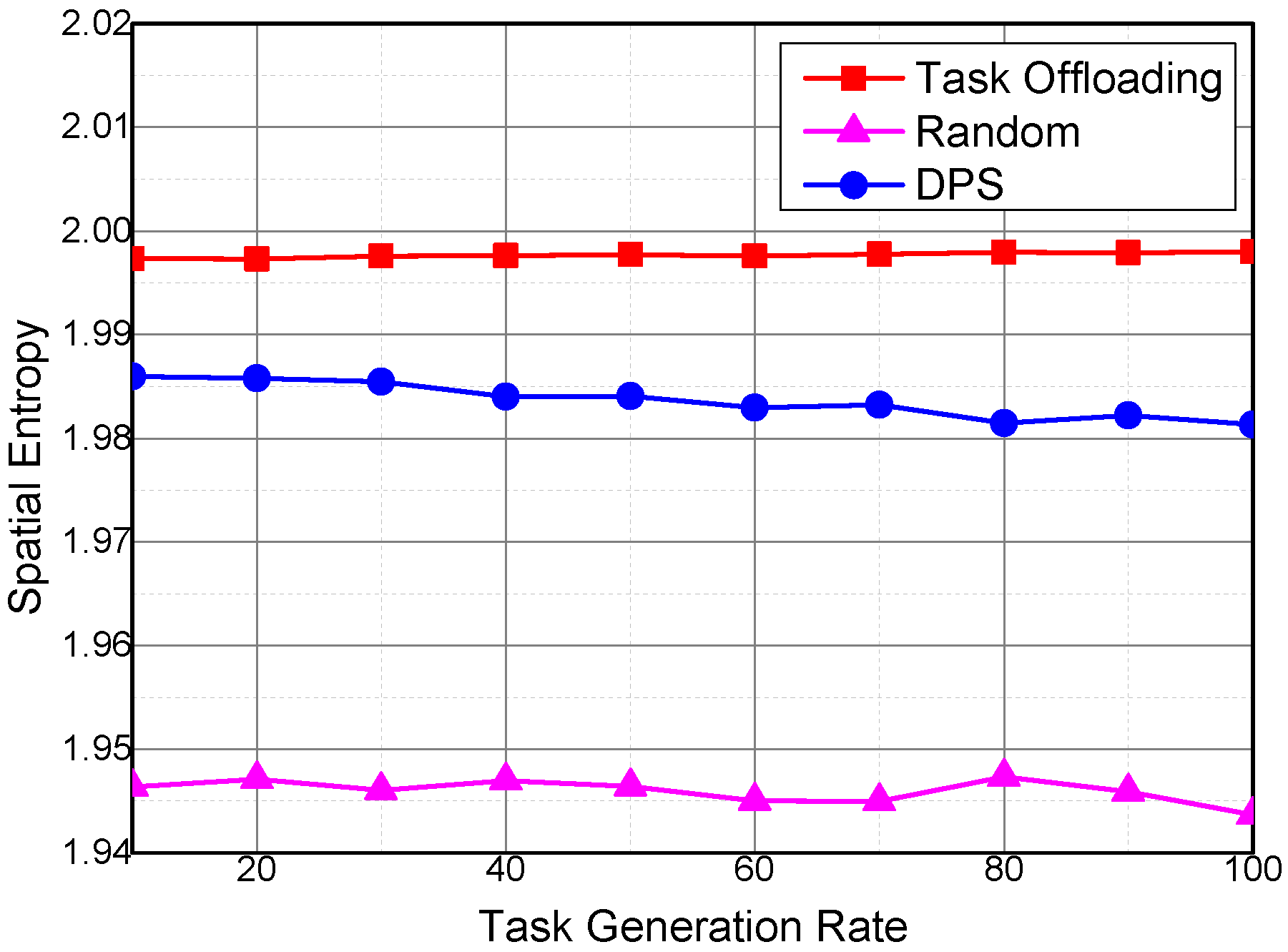
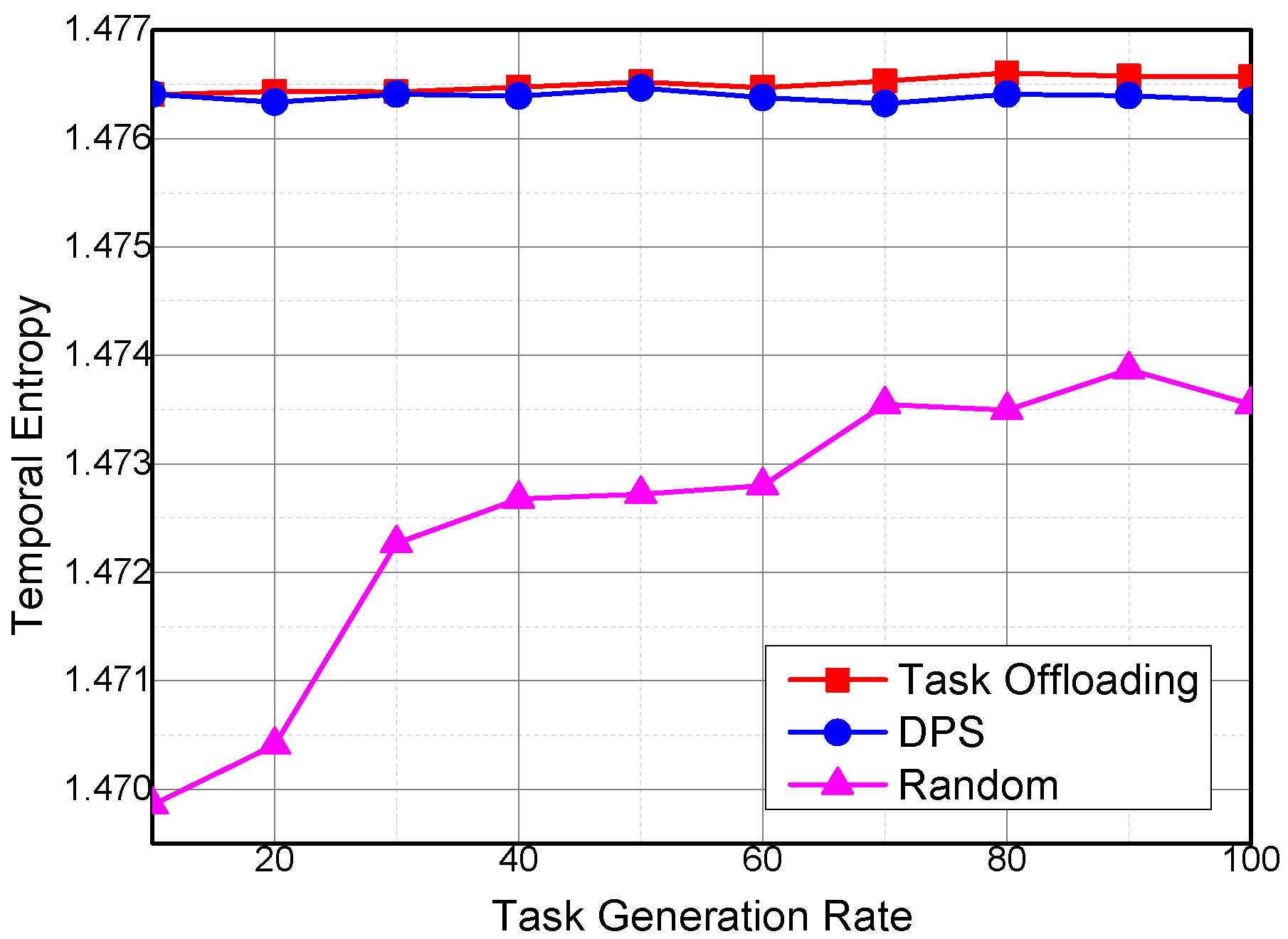
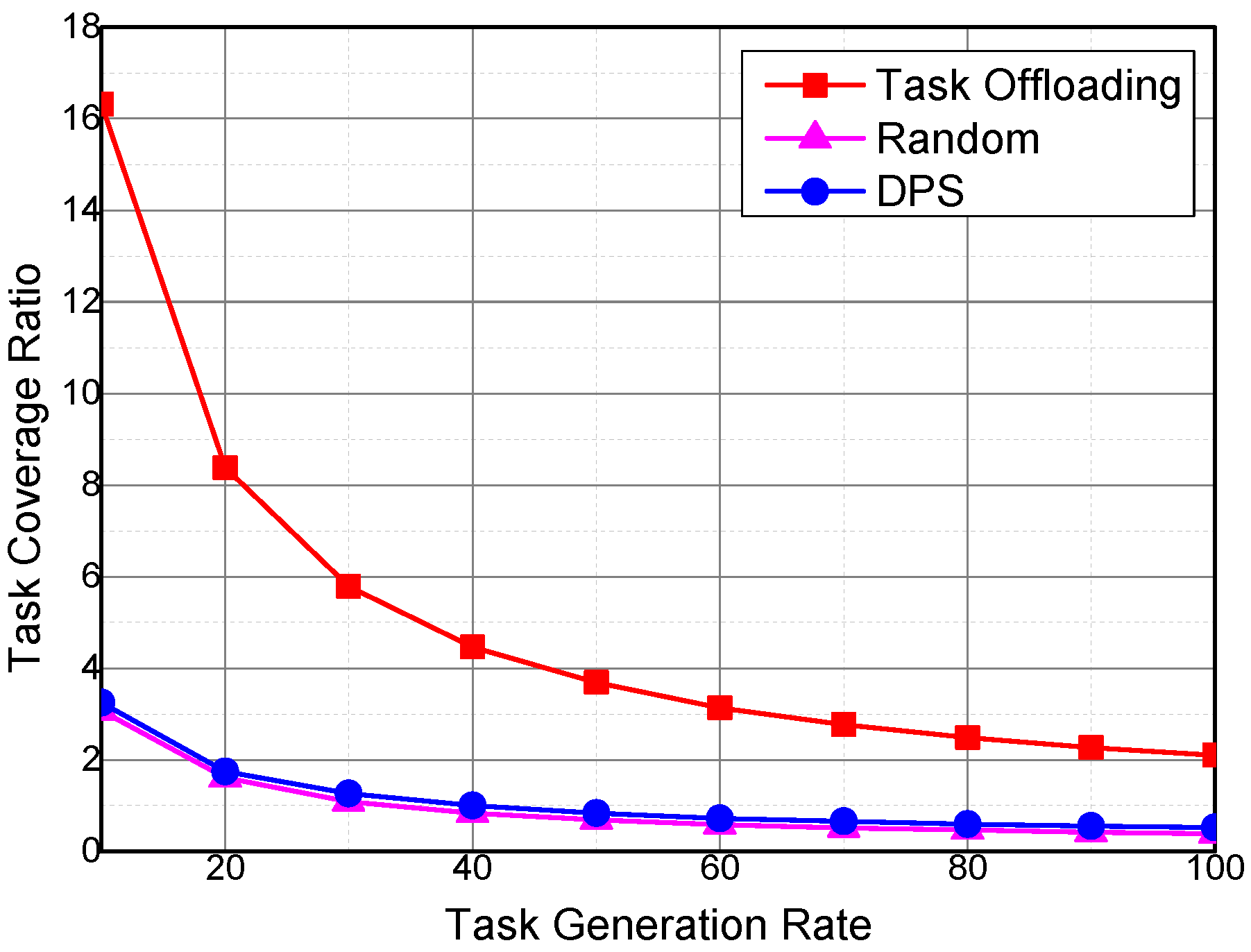
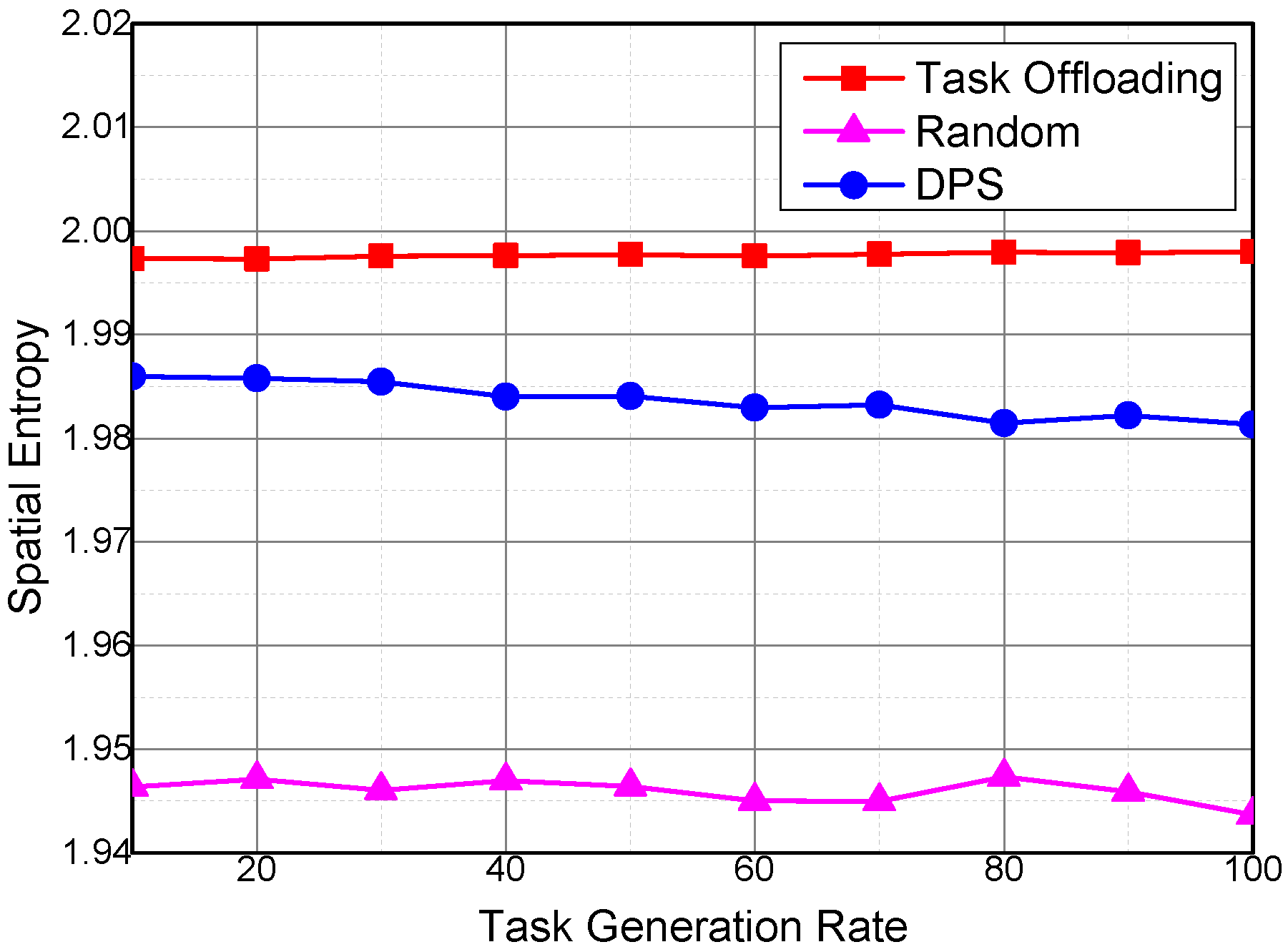
5.1.3. Impact of Task Generation Rate
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| GPS | Global Position System |
| MOSDEN | MObile Sensor Data ENgine |
| DPS | Dynamic Participant Selection |
References
- Ganti, R.K.; Ye, F.; Lei, H. Mobile Crowdsensing: Current State and Future Challenges. IEEE Commun. Mag. 2011, 49, 32–39. [Google Scholar] [CrossRef]
- Guo, B.; Yu, Z.; Zhou, X.; Zhang, D. From participatory sensing to mobile crowd sensing. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM 2014 Workshops), Budapest, Hungary, 24–28 March 2014; pp. 593–598.
- Khan, W.Z.; Xiang, Y.; Aalsalem, M.Y.; Arshad, Q. Mobile phone sensing systems: a survey. IEEE Commun. Surv. Tutor. 2013, 15, 402–427. [Google Scholar] [CrossRef]
- Devarakonda, S.; Sevusu, P.; Liu, H.; Liu, R.; Iftode, L.; Nath, B. Real-Time Air Quality Monitoring through Mobile Sensing in Metropolitan Areas. In Proceedings of the 2nd ACM SIGKDD International Workshop on Urban Computing (2013), Chicago, IL, USA, 11 August 2013; pp. 1–8.
- Zhou, P.; Cheng, Z.; Li, M. Smart traffic monitoring with participatory sensing. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems (SenSys’13), Rome, Italy, 11–14 November 2013; pp. 1–2.
- Banerjee, R.; Sinha, A.; Saha, A. Participatory sensing based Traffic Condition Monitoring using Horn Detection. In Proceedings of the 28th Annual ACM Symposium on Applied Computing, Coimbra, Portugal, 18–22 March 2013; pp. 567–569.
- Liu, Y.; Li, X. Heterogeneous Participant Recruitment for Comprehensive Vehicle Sensing. PLoS ONE 2015, 10, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Xie, S.; Wang, Y. Construction of Tree Network with Limited Delivery Latency in Homogeneous Wireless Sensor Networks. Wirel. Person. Commun. 2014, 78, 231–246. [Google Scholar] [CrossRef]
- Shen, J.; Tan, H.; Wang, J.; Wang, J.; Lee, S. A Novel Routing Protocol Providing Good Transmission Reliability in Underwater Sensor Networks. J. Internet Technol. 2015, 16, 171–178. [Google Scholar]
- Dutta, P.; Aoki, P.M.; Kumar, N.; Mainwaring, A.; Myers, C.; Willet, W.; Woodruff, A. Common sense: Participatory urban sensing using a network of handheld air quality monitors. In Proceedings of the 7th ACM Conference on Embedded Networked Sensor Systems (SenSys), Berkeley, CA, USA, 4–6 November 2009; pp. 349–350.
- Zheng, Y.; Liu, T.; Wang, Y.; Zhu, Y.; Liu, Y.; Chang, E. Diagnosing New York City’s Noises with Ubiquitous Data. In Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp 2014), Seattle, WA, USA, 13–17 September 2014; pp. 715–725.
- Pankratius, V.; Lind, F.; Coster, A.; Erickson, P.; Semeter, J. Mobile Crowd Sensing in Space Weather Monitoring: The Mahali Project. IEEE Commun. Mag. 2014, 52, 22–28. [Google Scholar] [CrossRef]
- Zhou, P.; Zheng, Y.; Li, M. How Long to Wait? Predicting Bus Arrival Time With Mobile Phone Based Participatory Sensing. IEEE Trans. Mob. Comput. 2014, 13, 1228–1241. [Google Scholar]
- TomTom. TomTom City: Optimizing Traffic by Linking Road Users, Connected Vehicles and Traffic Management. Available online: https://www.tomtom.com/en_gb/traffic-news/about (accessed on 2 July 2016).
- Zhang, D.; Wang, L.; Xiong, H.; Guo, B. 4W1H in Mobile Crowd Sensing. IEEE Commun. Mag. 2014, 52, 42–48. [Google Scholar] [CrossRef]
- Chon, Y.; Lane, N.D.; Kim, Y.; Zhao, F.; Cha, H. Understanding the coverage and scalability of place-centric crowd sensing. In Proceedings of the 2013 ACM International Joint Conference On Pervasive and Ubiquitous Computing (UbiComp 2013), Zurich, Switzerland, 8–12 September 2013; pp. 3–12.
- Cardone, G.; Foschini, L.; Bellavista, P.; Corradi, A.; Borcea, C.; Talasila, M.; Curtmola, R. Fostering participaction in smart cities: A geo-social crowdsensing platform. IEEE Commun. Mag. 2013, 51, 112–119. [Google Scholar] [CrossRef]
- Reddy, S.; Estrin, D.; Srivastava, M. Recruitment framework for participatory sensing data collections. In Pervasive Computing; Springer-Verlag: Berlin, Germany; Heidelberg, Germany, 2010; pp. 138–155. [Google Scholar]
- Tuncay, G.; Benincasa, G.; Helmy, A. Autonomous and distributed recruitment and data collection framework for opportunistic sensing. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 407–410.
- Ahmed, A.; Yasumoto, K.; Yamauchi, Y.; Ito, M. Distance and time based node selection for probabilistic coverage in people-centric sensing. In Proceedings of the 2011 8th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON 2011), Salt Lake City, UT, USA, 27–30 June 2011; pp. 134–142.
- Hachem, S.; Pathak, A.; Issarny, V. Probabilistic registration for large-scale mobile participatory sensing. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications (PerCom 2013), San Diego, CA, USA, 18–22 March 2013; pp. 132–140.
- Zhang, D.; Xiong, H.; Wang, L.; Chen, G. CrowdRecruiter: Selecting Participants for Piggyback Crowdsensing under Probabilistic Coverage Constraint. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 703–714.
- Song, Z.; Liu, C.H.; Wu, J.; Ma, J.; Wang, W. QoI-Aware Multitask-Oriented Dynamic Participant Selection With Budget Constraints. IEEE Trans. Veh. Technol. 2014, 63, 4618–4632. [Google Scholar] [CrossRef]
- Yang, G.; He, S.; Shi, Z. Leveraging Crowdsourcing for Efficient Malicious Users Detection in Large-Scale Social Networks. IEEE Internet Things J. 2016. [Google Scholar] [CrossRef]
- Ho, C.J.; Vaughan, J.W. Online Task Assignment in Crowdsourcing Markets. In Proceedings of the Twenty-Sixth AAAI Conference on Artificial Intelligence, Toronto, ON, Canada, 22–26 July 2012; Volume 12, pp. 45–51.
- He, S.; Shin, D.H.; Zhang, J.; Chen, J. Toward Optimal Allocation of Location Dependent Tasks in Crowdsensing. In Proceedings of the 33rd Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM’14), Toronto, ON, Canada, 27 April–2 May 2014; pp. 745–753.
- Sheng, X.; Tang, J.; Zhang, W. Energy-efficient collaborative sensing with mobile phones. In Proceedings of the 31rd Annual IEEE International Conference on Computer Communications (INFOCOM’12), Orlando, FL, USA, 25–30 March 2012; pp. 1916–1924.
- Liu, B.; Jiang, Y.; Sha, F.; Govindan, R. Cloud-enabled privacy-preserving collaborative learning for mobile sensing. In Proceedings of the 10th ACM Conference on Embedded Network Sensor Systems, Toronto, ON, Canada, 6–9 November 2012; pp. 57–70.
- Jayaraman, P.P.; Perera, C.; Georgakopoulos, D.; Zaslavsky, A. Efficient opportunistic sensing using mobile collaborative platform MOSDEN. In Proceedings of the 9th IEEE International Conference on Collaborative Computing: Networking, Applications and Worksharing (2013), Austin, TX, USA, 20–23 October 2013; pp. 1–10.
- Rachuri, K.K.; Efstratiou, C.; Leontiadis, I.; Mascolo, C.; Rentfrow, P.J. Smartphone sensing offloading for efficiently supporting social sensing applications. Pervasive Mob. Comput. 2014, 15, 3–21. [Google Scholar] [CrossRef]
- Wen, X.; Shao, L.; Xue, Y.; Fang, W. A rapid learning algorithm for vehicle classification. Inform. Sci. 2015, 295, 395–406. [Google Scholar] [CrossRef]
- Fernando, N.; Loke, S.W.; Rahayu, W. Mobile cloud computing: A survey. Future Gener. Comput. Syst. 2013, 29, 84–106. [Google Scholar] [CrossRef]
- Shi, C.; Lakafosis, V.; Ammar, M.H.; Zegura, E.W. Serendipity: Enabling Remote Computing among Intermittently Connected Mobile Devices. In Proceedings of the Thirteenth ACM International Symposium on Mobile Ad Hoc Networking and Computing, Hilton Head Island, SC, USA, 11–14 June 2012; pp. 145–154.
- Mtibaa, A.; Fahim, A.; Harras, K.A.; Ammar, M.H. Towards Resource Sharing in Mobile Device Clouds: Power Balancing Across Mobile Devices. In Proceedings of the Second ACM SIGCOMM Workshop on Mobile Cloud Computing, Hong Kong, China, 12 August 2013; pp. 51–56.
- Dong, Z.; Kong, L.; Cheng, P.; He, L.; Gu, Y.; Fang, L.; Zhu, T.; Liu, C. REPC: Reliable and Efficient Participatory Computing for Mobile Devices. In Proceedings of the Eleventh Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Singapore, 30 June–3 July 2014; pp. 257–265.
- Ma, H.; Zhao, D.; Yuan, P. Opportunities in Mobile Crowd Sensing. IEEE Commun. Mag. 2014, 52, 29–35. [Google Scholar] [CrossRef]
- Hull, B.; Bychkovsky, V.; Zhang, Y.; Chen, K.; Goraczko, M.; Miu, A.; Shih, E.; Balakrishnan, H.; Madden, S. CarTel: A Distributed Mobile Sensor Computing System. In Proceedings of the 4th ACM Conference on Embedded Networked Sensor Systems (Sensys’06), Boulder, CO, USA, 31 October–3 November 2006; pp. 125–138.
- Hu, S.C.; Wang, Y.C.; Huang, C.Y.; Tsengy, Y.C.; Kuoz, L.C.; Chen, C.Y. Vehicular sensing system for CO2 monitoring applications. In Proceedings of the IEEE VTS Asia Pacific Wireless Communications Symposium (APWCS’09), Shanghai, China, 8 October 2009; pp. 168–171.
- Görmer, S.; Park, S.B.; Egbert, P. Vision-based rain sensing with an in-vehicle camera. In Proceedings of the IEEE Intelligent Vehicles Symposium (2009), Xi’an, China, 3–5 June 2009; pp. 279–284.
- Hyyppä, J.; Jaakkola, A.; Hyyppä, H.; Kaartinen, H.; Kukko, A.; Holopainen, M.; Zhu, L.; Vastaranta, M.; Kaasalainen, S.; Krooks, A.; et al. Map updating and change detection using vehicle-based laser scanning. In Proceedings of the IEEE Joint Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009; pp. 1–6.
- Lee, M.; Song, J.; Jeong, J.P.; Kwon, T.T. DOVE: Data Offloading through Spatio-temporal Rendezvous in Vehicular Networks. In Proceedings of the 24th International Conference on Computer Communication and Networks (ICCCN), Las Vegas, NV, USA, 3–6 August 2015; pp. 1–8.
- Bazzi, A.; Masini, B.M.; Zanella, A.; Pasolini, G. IEEE 802.11p for cellular offloading in vehicular sensor networks. Comput. Commun. 2015, 60, 97–108. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, Z.; Zhu, H.; Li, M.; Zhang, Q. A Compressive Sensing Approach to Urban Traffic Estimation with Probe Vehicles. IEEE Trans. Mob. Comput. 2013, 12, 2289–2302. [Google Scholar] [CrossRef]
- Liu, Y.; Li, X. heterogeneous participant recruitment for comprehensive vehicle sensing. PLoS ONE 2015, 10, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Jang, J.; Baik, N. Diagnosing Hazardous Road Surface Conditions Through Probe Vehicle as Mobile Sensing Platform. In Proceedings of the International Conference on Winter Maintenance and Surface Transportation Weather, Coralville, IA, USA, 30 April–3 May 2012; pp. 54–60.
- Yuan, J.; Zheng, Y.; Xie, X.; Sun, G. Driving with knowledge from the physical world. In Proceedings of the 17th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (KDD’11), San Diego, CA, USA, 21–24 August 2011; pp. 316–324.
- Yuan, J.; Zheng, Y.; Zhang, C.; Xie, W.; Xie, X.; Sun, G.; Huang, Y. T-drive: Driving directions based on taxi trajectories. In Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems, San Jose, CA, USA, 2–5 November 2010; pp. 99–108.
- Huang, H.; Zhang, D.; Zhu, Y.; Li, M.; Wu, M.Y. A Metropolitan Taxi Mobility Model from Real GPS Traces. J. Univers. Comput. Sci. 2012, 18, 1072–1092. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| I | The set of subareas |
| One subarea | |
| Life cycle of the lth type of sensing data | |
| Sensing vehicles | |
| Sensing interfaces of vehicle α | |
| The time that vehicle α arrives at subarea i | |
| Residence time of vehicle in subarea i | |
| Valid sensing data in the sensing data center at time t | |
| Valid function of the sensing data of type l in subarea i at time t | |
| Mobility procedure of a vehicle | |
| The transition probability of a vehicle from sub area i to sub area j after time duration t | |
| Sensing task k | |
| Utility of sensing vehicle α to task |
| Parameter | Default Value |
|---|---|
| Simulation time | s |
| Number of participant vehicles | 60 |
| System duty cycle | 1000 s |
| Sensor types | 10 |
| Sensing data life cycle | 10 system duty cycles |
| Area partition | 100 () |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Wang, W.; Ma, Y.; Yang, Z.; Yu, F. Distributed Task Offloading in Heterogeneous Vehicular Crowd Sensing. Sensors 2016, 16, 1090. https://doi.org/10.3390/s16071090
Liu Y, Wang W, Ma Y, Yang Z, Yu F. Distributed Task Offloading in Heterogeneous Vehicular Crowd Sensing. Sensors. 2016; 16(7):1090. https://doi.org/10.3390/s16071090
Chicago/Turabian StyleLiu, Yazhi, Wendong Wang, Yuekun Ma, Zhigang Yang, and Fuxing Yu. 2016. "Distributed Task Offloading in Heterogeneous Vehicular Crowd Sensing" Sensors 16, no. 7: 1090. https://doi.org/10.3390/s16071090
APA StyleLiu, Y., Wang, W., Ma, Y., Yang, Z., & Yu, F. (2016). Distributed Task Offloading in Heterogeneous Vehicular Crowd Sensing. Sensors, 16(7), 1090. https://doi.org/10.3390/s16071090