
An Energy-Efficient Game-Theory-Based Spectrum Decision Scheme for Cognitive Radio Sensor Networks



Abstract
:1. Introduction
2. Related Works
3. Energy-Efficient Game-Theory-Based Spectrum Decision
3.1. CRSN Settings
- A set of N sensor nodes acting SUs S = {S1, S2, …, SN} with status(Si) {active, passive} and class(Si) {CH, CM, SN}, 1 ≤ i ≤ N. (Players)
- A set of M primary users T = {T1, T2, …, TM} with status(Tj) {active, passive}, 1 ≤ j ≤ M. (Players)
- A set of (L+1) licensed channels A = {A0, A1, A2, …, AL} and its SNR observed by Si SNRi = {SNR1, SNR2, …, SNRL}.
- A set of K unlicensed channels B = {B1, B2, …, BK} and its SNR observed by Si SNR’i = {SNR’1, SNR’2, …, SNR’K}.
- A common control channel Ccontrol = A0.
- An operating channel of Si on current frame f = (Ci)f = Ax or By or Ø, where 1 ≤ x ≤ L, 1 ≤ y ≤ K, and Ø means empty set.
- A backup channel of Si on current frame f = (C’i)f = Ax or By or Ø, where 1 ≤ x ≤ L, 1 ≤ y ≤ K, and (C’i)f ≠ (Ci)f.
- Status(Ax)i {available, not available, obsolete, idle, busy}, 1 ≤ x ≤ L, observed by Si.
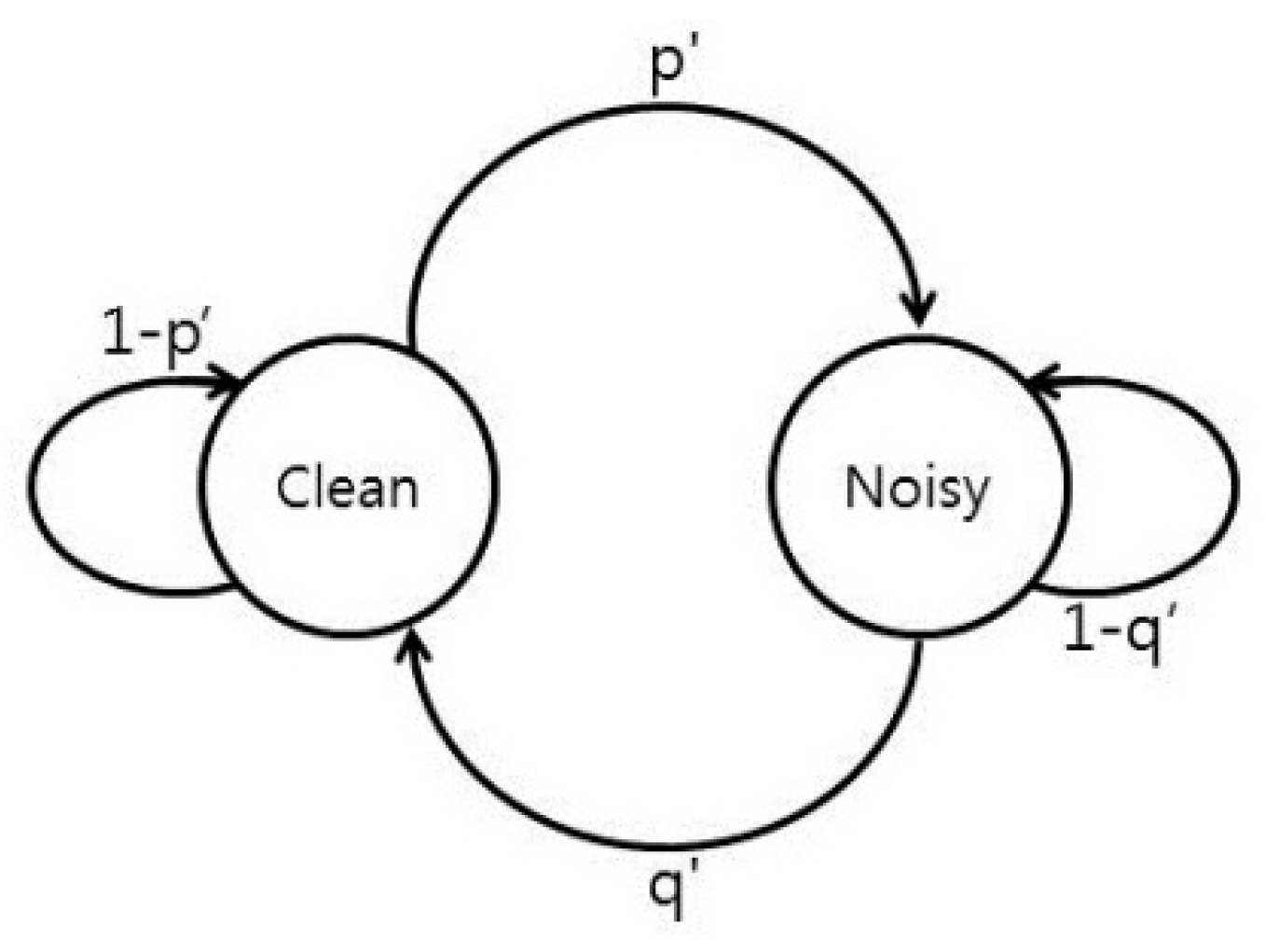
- Status(By)i {clean, noisy, unknown}, 1 ≤ y ≤ K, observed by Si.
- CH type = type(CH)i {0, 1, 2, 3, 4}, class(Si) = (CH), 1 ≤ i ≤ N.
3.2. Coordination Mode (C Mode)
3.2.1. Spectrum Sensing Module of C Mode
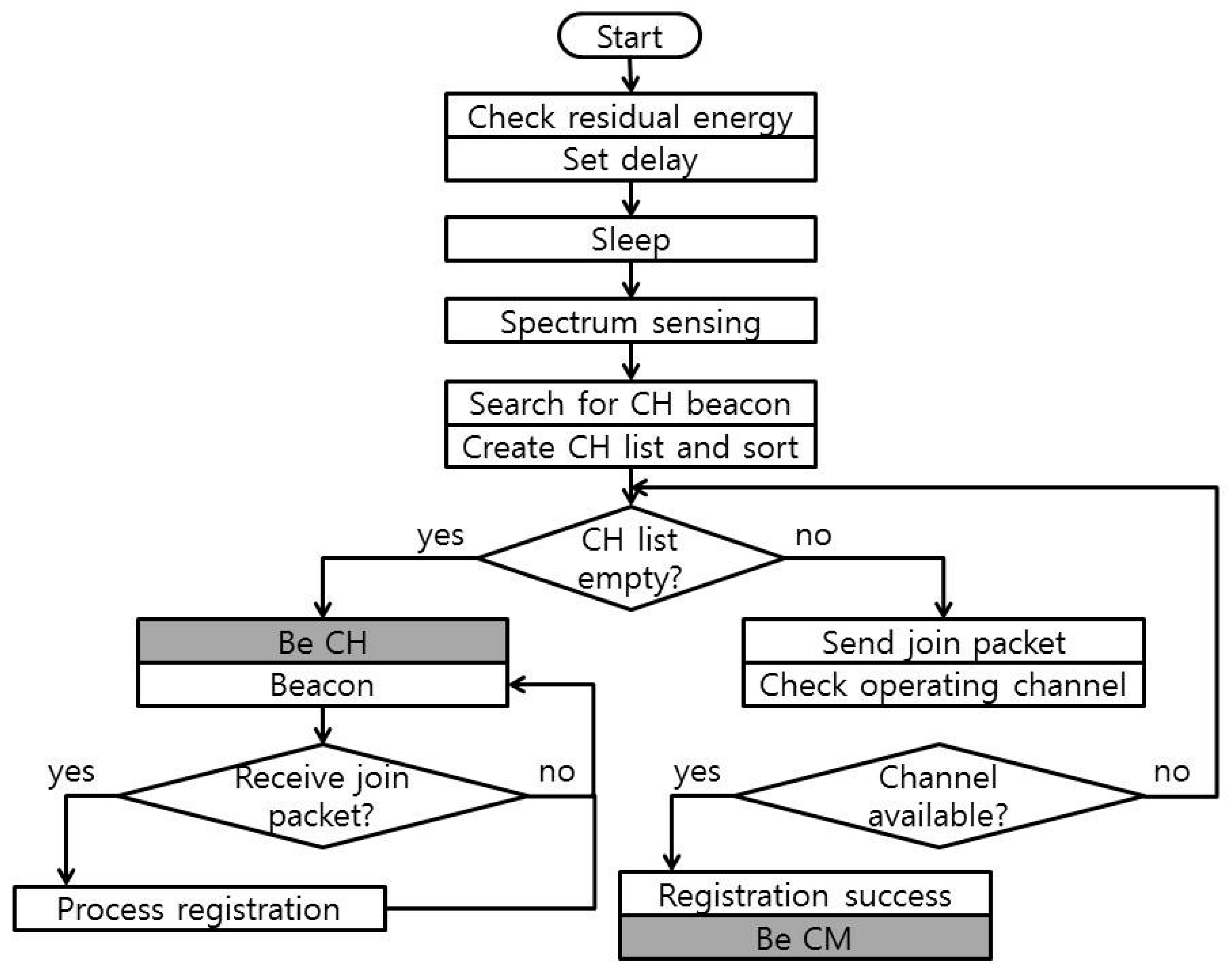
3.2.2. Clustering Algorithm of C Mode: Residual-Energy-Based Clustering
3.2.3. Spectrum Decision Module of C Mode
3.2.4. Data Transmission Module of C Mode
3.3. Data Transmission Mode (D Mode)
3.3.1. Spectrum Sensing Module of D Mode
3.3.2. Spectrum Decision Module of D Mode
3.3.3. Data Transmission Module of D Mode
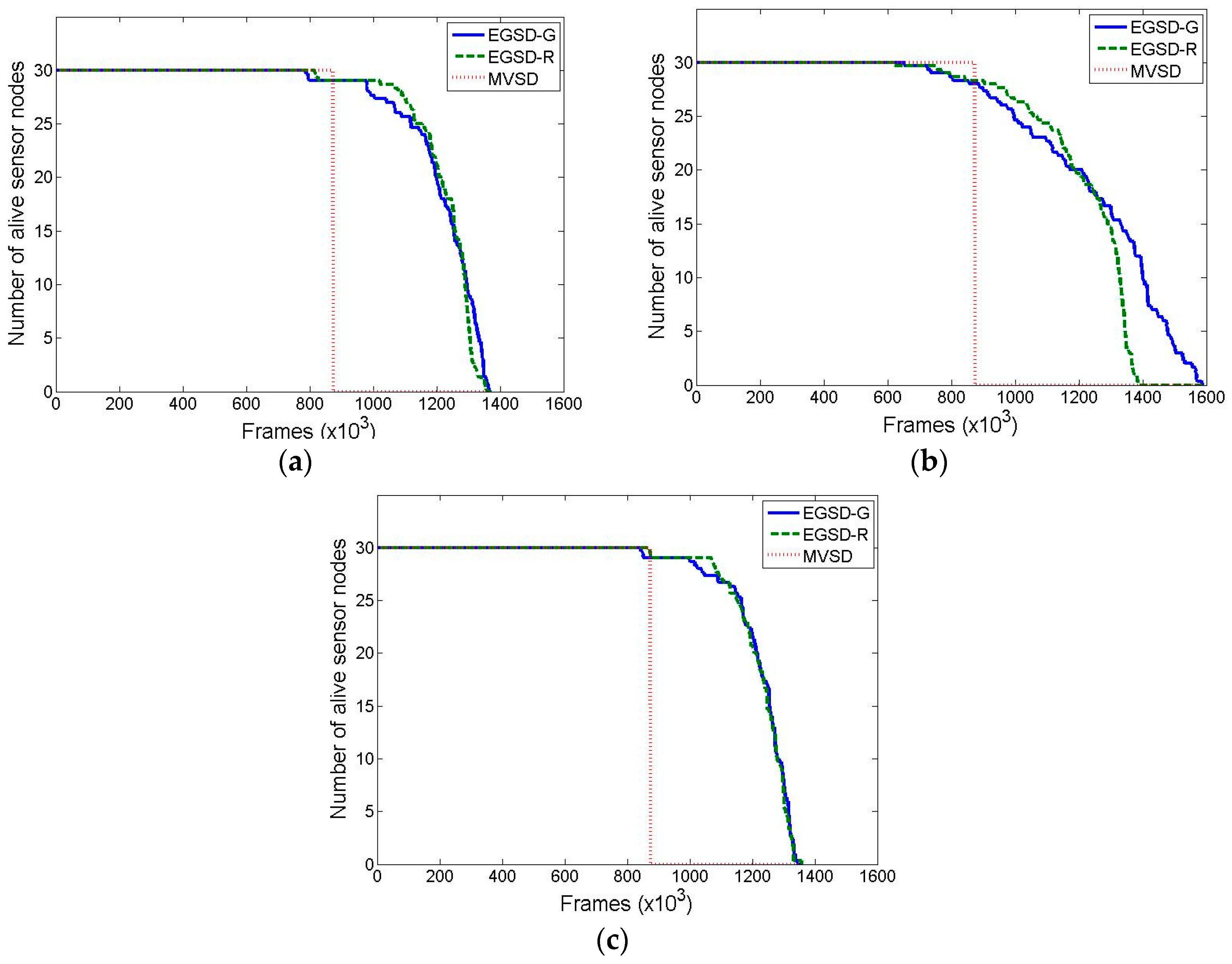
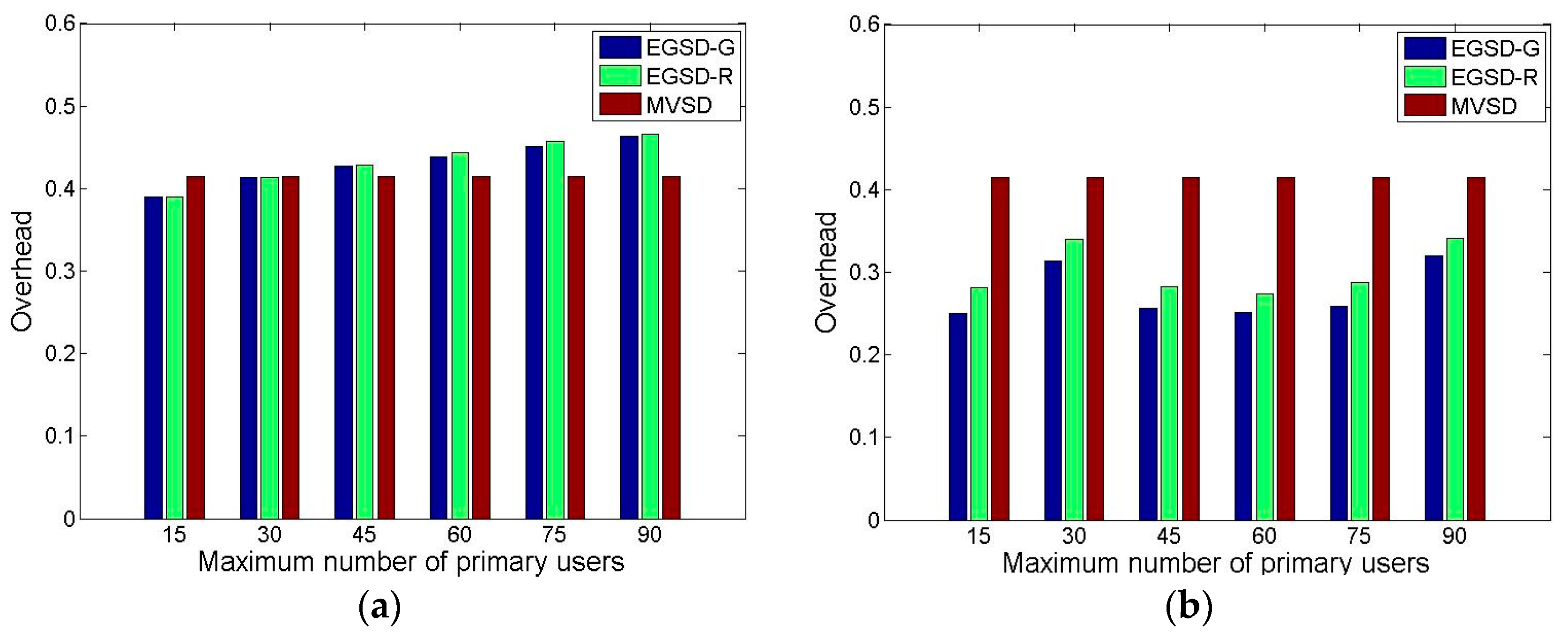
4. Performance Evaluation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akylidiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless Sensor Networks: A Survey. Comput. Netw. 2001, 38, 393–422. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless Sensor Network Survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Spectrum Efficiency Working Group. Report of the Spectrum Efficiency Working Group; Federal Communications Commission Spectrum Policy Task Force: Washington, DC, USA, 2002.
- Valenta, V.; Marsalek, R.; Baudoin, G.; Villegas, M.; Suarez, M.; Robert, F. Survey on Spectrum Utilization in Europe: Measurements, Analyses and Observations. In Proceedings of the Fifth International Conference on Cognitive Radio Oriented Wireless Networks and Communications (CrownCom 2010), Cannes, France, 9–11 June 2010; pp. 1–5.
- Urban, R.; Korinek, T.; Pechac, P. Broadband Spectrum Survey Measurements for Cognitive Radio Applications. Radioengineering 2012, 21, 1101–1109. [Google Scholar]
- Mitola, J.; Maguire, G.Q., Jr. Cognitive Radio: Making Software Radios More Personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Mitola, J. Cognitive Radio—An Integrated Agent Architecture for Software Defined Radio. Ph.D. Thesis, Teleinformatics, Royal Institute of Technology, Stockholm, Sweden, 2000. [Google Scholar]
- Haykin, S. Cognitive Radio: Brain-Empowered Wireless Communications. IEEE J. Sel. Area. Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Federal Communications Commision. Notice of Proposed Rule Making and Order; Federal Communications Commission: Washington, DC, USA, 2003.
- Lu, L.; Zhou, X.; Onunkwo, U.; Li, G.Y. Ten Years of Research in Spectrum Sensing and Sharing in Cognitive Radio. EURASIP J. Wirel. Commun. 2012, 1. [Google Scholar] [CrossRef]
- Wang, B.; Liu, K.R. Advances in Cognitive Radio Networks: A Survey. IEEE J. Sel. Top. Signal Proc. 2011, 5, 5–23. [Google Scholar] [CrossRef]
- Cumanan, K.; Zhang, R.; Lambotharan, S. A New Design Paradigm for MIMO Cognitive Radio with Primary User Rate Constraint. IEEE Commun. Lett. 2012, 16, 706–709. [Google Scholar] [CrossRef]
- Cumanan, K.; Musavian, L.; Lambotharan, S.; Gershman, A.B. SINR Balancing Technique for Downlink Beamforming in Cognitive Radio Networks. IEEE Signal Proc. Lett. 2010, 17, 133–136. [Google Scholar] [CrossRef]
- Stevenson, C.R.; Chouinard, G.; Lei, Z.; Hu, W.; Shellhammer, S.J.; Caldwell, W. IEEE 802.22: The First Cognitive Radio Wireless Regional Area Network Standard. IEEE Commun. Mag. 2009, 47, 130–138. [Google Scholar] [CrossRef]
- Akan, O.B.; Karli, O.; Ergul, O. Cognitive Radio Sensor Networks. IEEE Netw. 2009, 23, 34–40. [Google Scholar] [CrossRef]
- Tozlu, S.; Senel, M.; Mao, W.; Keshavarzian, A. Wi-Fi Enabled Sensors for Internet of Things: A Practical Approach. IEEE Commun. Mag. 2012, 50, 134–143. [Google Scholar] [CrossRef]
- Libelium, 50 Sensor Applications for a Smarter World. Available online: http://www.libelium.com/top_50_iot_sensor_applications_ranking/download (accessed on 8 September 2015).
- Ding, G.; Wang, J.; Wu, Q.; Song, F.; Chen, Y. Spectrum Sensing in Opportunity-Heterogeneous Cognitive Sensor Networks: How to Cooperate? IEEE Sens. J. 2013, 13, 4247–4255. [Google Scholar] [CrossRef]
- Goh, H.G.; Kwong, K.H.; Shen, C.; Michie, C.; Andonovic, I. CogSeNet: A Concept of Cognitive Wireless Sensor Network. In Proceedings of 7th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 9–12 January 2010; pp. 1–2.
- Peha, J.M. Approaches to Spectrum Sharing. IEEE Commun. Mag. 2005, 43, 10–12. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Lee, W.Y.; Vuran, M.C.; Mohanty, S. NeXt Generation/Dynamic Spectrum Access/Cognitive Radio Wireless Networks: A Survey. Comput. Netw. 2006, 50, 2127–2159. [Google Scholar] [CrossRef]
- Tandra, R.; Mishra, S.M.; Sahai, A. What is a Spectrum Hole and what does It Take to Recognize One? Proc. IEEE 2009, 97, 824–848. [Google Scholar] [CrossRef]
- Ding, G.; Wu, Q.; Yao, Y.D.; Wang, J.; Chen, Y. Kernel-Based Learning for Statistical Signal Processing in Cognitive Radio Networks: Theoretical Foundations, Example Applications, and Future Directions. IEEE Signal Proc. Mag. 2013, 30, 126–136. [Google Scholar] [CrossRef]
- Yucek, T.; Arslan, H. A Survey of Spectrum Sensing Algorithms for Cognitive Radio Applications. IEEE Commun. Surv. Tutor. 2009, 11, 116–130. [Google Scholar] [CrossRef]
- Masonta, M.T.; Mzyece, M.; Ntlatlapa, N. Spectrum Decision in Cognitive Radio Networks: A Survey. IEEE Commun. Surv. Tutor. 2013, 15, 1088–1107. [Google Scholar] [CrossRef]
- Jia, J.G.; He, Z.W.; Kuang, J.M.; Wang, H.F. Analysis of Key Technologies for Cognitive Radio Based Wireless Sensor Networks. In Proceedings of the 6th International Conference on Wireless Communications Networking and Mobile Computing (WiCOM 2010), Chengdu, China, 23–25 September 2010; pp. 1–5.
- Li, X.; Wang, D.; McNair, J.; Chen, J. Residual Energy Aware Channel Assignment in Cognitive Radio Sensor Networks. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC 2011), Quintana-Roo, Mexico, 28–31 March 2011; pp. 398–403.
- Hu, Z.; Sun, Y.; Ji, Y. A Dynamic Spectrum Access Strategy Based on Real-Time Usability in Cognitive Radio Sensor Networks. In Proceedings of the 7th International Conference on Mobile Ad-hoc and Sensor Networks (MSN 2011), Beijing, China, 16–18 December 2011; pp. 318–322.
- Wu, C.; Ohzahata, S.; Kato, T. Dynamic Channel Assignment and Routing for Cognitive Sensor Networks. In Proceedings of the IEEE International Symposium on Wireless Communication Systems (ISWCS 2012), Paris, France, 28–31 August 2012; pp. 86–90.
- Cardei, M.; Mihnea, A. Channel Assignment in Cognitive Wireless Sensor Networks. In Proceedings of the International Conference on Computing, Networking and Communications (ICNC 2014), Honolulu, HI, USA, 3–6 February 2014; pp. 588–593.
- Jamal, A.; Tham, C.K.; Wong, W.C. Event Detection and Channel Allocation in Cognitive Radio Sensor Networks. In Proceedings of the IEEE International Conference on Communication Systems (ICCS 2012), Singapore, 21–23 November 2012; pp. 157–161.
- Han, J.A.; Jeon, W.S.; Jeong, D.G. Energy-Efficient Channel Management Scheme for Cognitive Radio Sensor Networks. IEEE Trans. Veh. Technol. 2011, 60, 1905–1910. [Google Scholar] [CrossRef]
- Yu, J.Y.; Mannor, S. Online Learning in Stochastic Games and Markov Decision Processes. Available online: http://www.cim.mcgill.ca/~jiayuan/survey08.pdf (accessed on 8 September 2015).
- Bowling, M.; Veloso, M. An Analysis of Stochastic Game Theory for Multiagent Reinforcement Learning. Technical Report, No. CMU-CS-00-165; Computer Science, Carnegie-Mellon University: Pittsburgh, PA, USA, 2000. [Google Scholar]
- Byun, S.S.; Balasingham, I.; Liang, X. Dynamic Spectrum Allocation in Wireless Cognitive Sensor Networks: Improving Fairness and Energy Efficiency. In Proceedings of the IEEE 68th Vehicular Technology Conference, Calgary, AB, Canada, 21–24 September 2008; pp. 1–5.
- Marin, L.; Giupponi, L. Performance Evaluation of Spectrum Decision Schemes for a Cognitive Ad-hoc Network. In Proceedings of the IEEE 19th International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Palais des Festivals Cannes, France, 15–18 September 2008.
- Canberk, B.; Akyildiz, I.F.; Oktug, S. A QoS-aware Framework for Available Spectrum Characterization and Decision in Cognitive Radio Networks. In Proceedings of the IEEE 21st International Symposium on Personal Indoor and Mobile Radio Communications (PIMRC 2010), Istanbul, Turkey, 26–29 September 2010; pp. 1533–1538.
- Yao, Y.; Ngoga, S.R.; Popescu, A. Cognitive Radio Spectrum Decision Based on Channel Usage Prediction. In Proceedings of the 8th EURO-NGI Conference on Next Generation Internet (NGI 2012), Karlskrona, Sweden, 25–27 June 2012; pp. 41–48.
- Yang, Y.; Zhang, G.A.; Ji, Y.C. Impartial Spectrum Decision under Interference Temperature Model in Cognitive Wireless Mesh Networks. Int. J. Embed. Syst. 2013, 5, 134–141. [Google Scholar] [CrossRef]
- Li, Y.; Dong, Y.; Zhang, H.; Zhao, H.; Shi, H.; Zhao, X. QoS Provisioning Spectrum Decision Algorithm Based on Predictions in Cognitive Radio Networks. In Proceedings of the 6th International Conference on Wireless Communications Networking and Mobile Computing (WiCOM 2010), Chengdu, China, 23–25 September 2010; pp. 1–4.
- Wang, L.C.; Wang, C.W.; Adachi, F. Load-Balancing Spectrum Decision for Cognitive Radio Networks. IEEE J. Sel. Area. Commun. 2011, 29, 757–769. [Google Scholar] [CrossRef]
- Jin, Z.; Anand, S.; Subbalakshmi, K.P. Robust Spectrum Decision Protocol against Primary User Emulation Attacks in Dynamic Spectrum Access Networks. In Proceedings of the IEEE Global Telecommunications Conference (Globecom 2010), Miami, FL, USA, 6–10 December 2010; pp. 1–5.
- Jakimoski, G.; Subbalakshmi, K.P. Towards Secure Spectrum Decision. In Proceedings of the IEEE International Conference on In Communications (ICC 2009), Dresden, Germany, 14–18 June 2009; pp. 1–6.
- Mishra, V.; Tong, L.C.; Chan, S.; Kumar, A. Energy Aware Spectrum Decision Framework for Cognitive Radio Networks. In Proceedings of the International Symposium on Electronic System Design (ISED 2012), Kolkata, India, 19–22 December 2012; pp. 309–313.
- Lee, W.Y.; Akyldiz, I.F. A Spectrum Decision Framework for Cognitive Radio Networks. IEEE Trans. Mobile Comput. 2011, 10, 161–174. [Google Scholar]
- Lin, X.; Fang, Y. A Survey on the Available Digital TV Bands for Cognitive Radio Operations. In Proceedings of the IEEE Fourth International Conference on Communications and Networking in China (ChinaCOM 2009), Xi’an, China, 26–28 August 2009; pp. 1–7.
- Shellhammer, S.; Chouinard, G. Spectrum Sensing Requirements Summary; IEEE: New York, NY, USA, 2006. [Google Scholar]
- Shnayder, V.; Hempstead, M.; Chen, B.R.; Allen, G.W.; Welsh, M. Simulating the power consumption of large-scale sensor network applications. In Proceedings of the ACM 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 188–200.
- Find the Energy Contained in Standard Battery Sizes. Available online: http://www.allaboutbatteries.com/Energy-tables.html (accessed on 8 September 2015).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Network area | 300 m × 300 m |
| Number of sensor nodes | 30 nodes |
| Installation method | Random |
| Number of sink | 1 |
| Location of sink | 150 m, 150 m |
| PU protection range | 50 m |
| PU active probability = PU passive probability | 0.5 |
| PU location mobility = PU channel mobility | 0.5 |
| Number of licensed channel | 29 channels |
| Number of unlicensed channel | 29 channels |
| Maximum noise level | 10 |
| Maximum peak interference | 14 |
| SNR’thres | 5 |
| Common control channel frequency | 474 MHz |
| Licensed channel frequencies | 482–546 MHz (bandwidth 8 MHz) and 536–787 MHz (bandwidth 13 MHz) |
| Unlicensed channel frequencies | ISM 2.4 GHz and 5 GHz |
| Power supply of sensor nodes | 9360 J × 2 [48,49] |
| Sensing range | 50 m |
| Transmission range (initial) | 100 m |
| Interference range | 150 m |
| Maximum limit of random delay | 25 time slots |
| Residual energy levels | 5 levels |
| pthres = p’thres | 0.5 |
| CHTmax = CHT’max | 2 |
| Minimum active channel | 5 channels |
| C mode request threshold | 3 normal requests or 1 urgent request |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salim, S.; Moh, S. An Energy-Efficient Game-Theory-Based Spectrum Decision Scheme for Cognitive Radio Sensor Networks. Sensors 2016, 16, 1009. https://doi.org/10.3390/s16071009
Salim S, Moh S. An Energy-Efficient Game-Theory-Based Spectrum Decision Scheme for Cognitive Radio Sensor Networks. Sensors. 2016; 16(7):1009. https://doi.org/10.3390/s16071009
Chicago/Turabian StyleSalim, Shelly, and Sangman Moh. 2016. "An Energy-Efficient Game-Theory-Based Spectrum Decision Scheme for Cognitive Radio Sensor Networks" Sensors 16, no. 7: 1009. https://doi.org/10.3390/s16071009
APA StyleSalim, S., & Moh, S. (2016). An Energy-Efficient Game-Theory-Based Spectrum Decision Scheme for Cognitive Radio Sensor Networks. Sensors, 16(7), 1009. https://doi.org/10.3390/s16071009