1. Introduction
With the development of global navigation satellite systems (GNSS) and wireless communication technologies in recent years, GNSS collaborative positioning is becoming attractive [
1]. Nowadays, there are many scenarios in which multiple GNSS receivers work simultaneously in a certain region [
2]. For instance, a platoon of military men carries out a task together, people locate their positions in a shopping center,
etc. The collaboration between GNSS receivers refers to a group of users conducting joint data processing by sharing the measurements from GNSS signals and certain relative measurements (distance, azimuth or elevation) with their neighboring users. Collaborative localization has been an active research topic, because it provides several potential advantages, including better positioning availability, stability and accuracy. In challenging environments, such as urban canyons and forests, GNSS standalone receivers usually fail to provide reliable positioning results. However, GNSS collaborative positioning can be a promising method.
In the previous studies on GNSS collaboration, only the relative distance measurements between neighboring users were involved. The collaboration between GNSS users was first proposed in [
3] by using the weighted least squares (WLS) algorithm, and then, the estimation algorithms based on the Kalman filter (KF) have been used to solve the collaborative localization problem [
4,
5,
6]. In [
7], the Cramer-Rao lower bound (CRLB) for collaborative positioning with relative distance measurements is derived, and the effects of various factors are also analyzed and verified based on the collaborative dilution of precision (CDOP) model in [
8].
Compared to localization with only distance measurements, the localization can also be performed using angle-of-arrival (AOA) measurements [
9]. In general, location estimates of mobile users are derived from two types of measurements: AOA and range. However, specific algorithms and analysis on GNSS collaborative positioning with AOA measurements between neighboring users are still lacked. The AOA measurements are usually achieved by applying antenna arrays. There are either iterative or non-iterative AOA positioning methods proposed in [
10,
11,
12]. However, all of them only employ the AOA measurements from the anchor users and have ignored the interconnectivity among the neighboring blind users. For the collaboration with relative AOA measurements, the researchers of [
13] investigate the nonlinear observability of collaborative localization for two robots, and the analysis shows that relative bearing is the best observation between the robots. In [
14], the cooperative positioning methods with the AOA measurements in wireless sensor networks are proposed, and the cooperative localization simulation and experimental results are shown in [
15].
In this paper, a new technique is proposed that makes use of AOA measurements in conjunction with GNSS collaborative positioning. It assumes that the AOA measurements with neighboring users are available for the collaborative user group. Then, the CRLB of different collaborative positioning and statistical analysis of positioning errors are deduced. In GNSS standalone positioning, each user only obtains the pseudo-range measurements from its visible GNSS satellites; however, in GNSS collaborative positioning, the available measurements include extra measurements (distances, azimuths or elevations) between the neighboring users. As a result, there are more impact factors on the collaborative positioning accuracy, which brings more problems to the process of performance analysis. Based on the derivation of CRLB and positioning algorithms, the comparison with GNSS positioning without AOA measurements is performed by theoretical analysis. The effects of various factors are also analyzed and verified, such as the impacts of the number of collaborative users, their distribution and AOA measurement accuracy. In addition, considering that there are some limitations on increasing the number of users due to power and complexity constraints, the influence of the relative location of the collaborative users is also discussed in order to choose appropriate neighboring users.
Finally, in outdoor and partially-blocked simulation scenarios, respectively, simulation tests are carried out with several GNSS users. The simulation results fall in line with the results of theoretical analysis. Besides, the collaborative positioning experiment is carried out with several GNSS receivers in an actual scenario. The conclusions provide useful information for the design and test of actual collaborative applications.
The remainder of this paper is organized as follows.
Section 2 gives a brief overview of the collaborative positioning signal and system model. Then, in
Section 3, expressions for the Fisher information matrix (FIM) and CRLB are derived for different collaborative cases. The collaborative WLS positioning algorithm is proposed in
Section 4. Based on this CRLB model,
Section 5 presents the theoretical analysis. The impacts of various factors are included, and the comparison with GNSS standalone positioning is done. In
Section 6, the simulation tests are carried out to verify the analysis results in different scenarios. The results of the experiment in an actual scenario and discussions are presented in
Section 7. Finally, the conclusions are given in
Section 8.
2. Signal Model
Consider a collaborative network in which there are
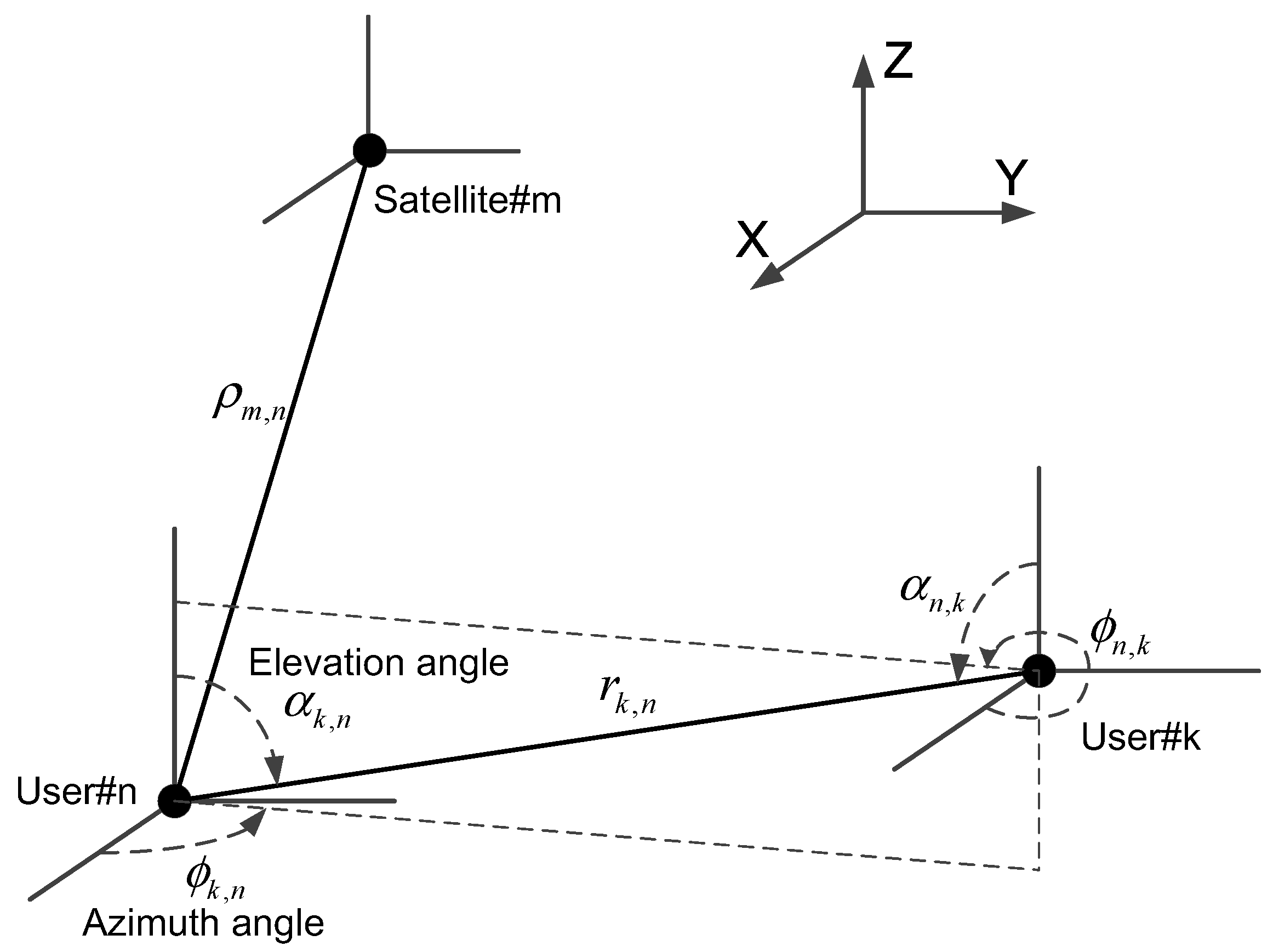
N users, each of which is equipped with a GNSS receiver and is able to obtain relative measurement estimates from its neighboring users. The relative measurements usually contain distance and AOA (both azimuth and elevation angles) estimates.
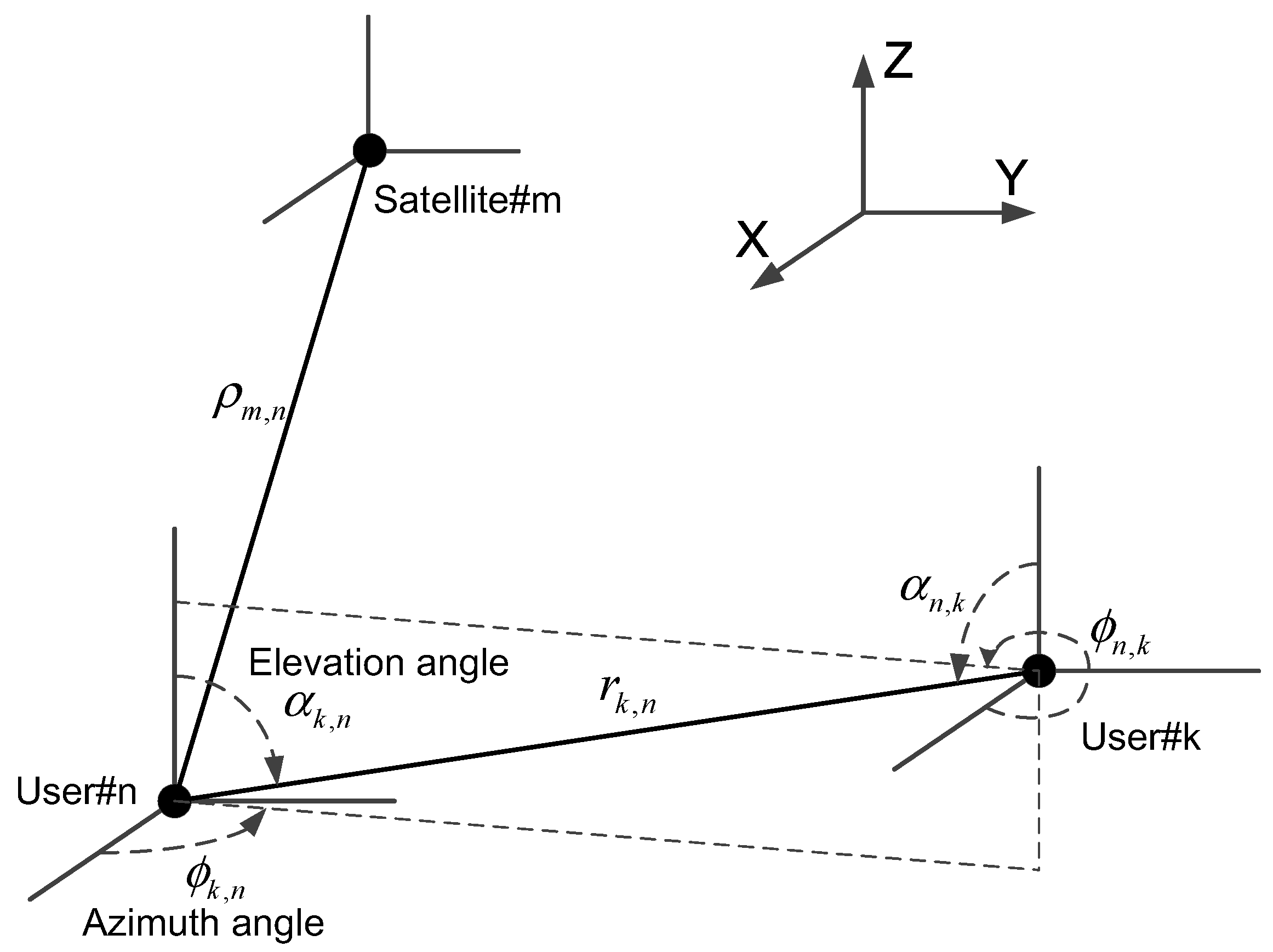
Figure 1 is a simple diagram constructed to provide a mental image and understanding of GNSS collaboration. As shown in
Figure 1, user #
n and user #
k are within the radio range of each other.
In this paper, the collaborative positioning algorithm is a centralized algorithm, and all of the measurements are processed in a collaborative process center. After the execution of the positioning algorithm, the process center sends the positioning results to all of the users. In most cases, the collaborative process center is one of the users. For example, the user #1 can be chosen as the process center in
Figure 1. Of course, a dedicated process center can also be used.
For any user #
n in the collaborative network, the three-dimensional position and clock error expressed in the distance unit are indicated respectively by:
where
is the speed of light. Denote by
the set of the visible GNSS satellites and by
the set of collaborative users for user #
n. The three-dimensional positions of visible satellites and collaborative users are indicated respectively by:
and:
For GNSS collaboration in this paper, there are three kinds of measurements that can be used.
2.1. Pseudo-Range Measurements
In general, for GNSS positioning, the users cannot directly measure the real ranges to the satellites, but determines the estimate of pseudo-ranges from the GNSS tracking process. The pseudo-range measurement is defined as the sum of the propagation delay from the receiver to the satellite plus the unknown clock bias, which is given by:
where
is the real range from satellite #
m to user #
n and
is the measurement noise of the tracking process.
is typically made up of satellite ephemeris and clock error, atmospheric (ionosphere and troposphere) transmission error, receiver thermal noise, multipath error,
etc. [
16].
2.2. Distance Measurements
In addition to using pseudo-range measurements, GNSS collaborative positioning algorithms may use the relative distance measurements between the neighboring users. There are many kinds of measuring methods for the distance measurements, for example by measuring the round-trip time.
For user #
n, the distance measurement from its neighboring user #
k is given by:
where
is the real range of two users and
is the distance measurement noise. In general,
is relative to the ranging technology and the external environment. At present, the most common ranging technologies are based on the measurements of received signal strength (RSS) or time-of-arrival (TOA). Typically, meter-level accuracy of relative distance measurements can be achieved, and for some high accuracy ranging technology, like ultra-wideband (UWB) for TOA, centimeter level accuracy can be obtained [
17].
2.3. AOA Measurements
Most of the existing research on GNSS collaborative positioning are based on the pseudo-range and distance measurements. Specific algorithms and performance analysis with AOA measurements are lacked. In this paper, we add the AOA measurements to GNSS collaborative positioning and analyse the positioning performance with different types of measurements. The AOA collaborative technique is based on the measurement of angles between the collaborative users. Generally, the AOA measurements can be achieved by applying an antenna array.
The azimuth and elevation measurements by user #
n from user #
k are given respectively by:
where
and
are respectively the real azimuth and elevation between user #
n and user #
k. In the physical sense,
is the line user #
n point to user #
k of the angle with the
x axis and
the line of the angle with the
z axis. The value of
ranges from 0° to 360°, and the value of
ranges from 0° to 180°. They are defined as:
and
are respectively the measurement noises of the relative azimuth and elevation. Their noise variance highly depends on the communication environment, the AOA detection device (method) and line-of-sight (LOS) connections. Therefore, the multipath effects, such as reflections, scattering and fading, have a negative influence on positioning performance, and it is very difficult to find a single model that can be applied to all situations [
18]. For analytical convenience, a simple model is used to characterize the AOA measurements combining the errors caused by multipath, the channel and the device/method. With the development of the AOA measuring technologies, it can already guarantee that the standard deviations of AOA measurements are always smaller than 10° [
10].
4. GNSS Collaborative Positioning Algorithm
Making use of AOA measurements or both types of measurement, the cost functions are respectively defined as:
or:
The positions of users are estimated by minimizing the aforementioned cost functions:
There are a number of optimization algorithms that can be used to solve the minimization problems in Equation (34) [
19]. In this paper, the WLS algorithm is used in combination with the Newton iterative method; thus, it is worth giving a brief description of the algorithm as follows.
The first order Taylor expansion is used to linearize the nonlinear measurements. For user #n, the (small) position coordinate estimation errors and the receiver clock bias error are denoted by , , and .
4.1. Only AOA Measurements
Different from the GNSS standalone positioning, for collaboration with AOA measurements, the measurement sets are used for GNSS collaborative positioning in this subsection.
By using the first order Taylor expansion, the estimation error in pseudo-range measurements can be approximated as:
where:
In the same way, the estimation error in AOA measurements can be approximated as:
where:
Equations (35) and (37) respectively give the error of the pseudo-range and AOA measurements as a function of the positional and clock bias errors. However, the positioning algorithm requires the estimates of the positional and clock bias errors as a function of the pseudo-range and AOA measurement errors. For the convenience of analysis, all of the observational equations based on Equations (35) and (37) can be expressed in a compact form as:
where:
indicates the residual errors of each measurement:
4.2. Both Distance and AOA Measurements
With both distance and AOA measurements, the measurement sets
are used here. Similarly, by using the first order Taylor expansion, the estimation error in distance measurements can be approximated as:
All of the observational equations based on Equations (35), (37) and (42) can be expressed in a compact form as:
where:
Similarly,
indicates the residual errors of each measurement and
can be expressed as:
Noting that after first order Taylor expansion, the original set of a nonlinear observation equations turns into a set of linear equations, and furthermore, if the rank of
or
is
, which means the matrix is column full rank, then a WLS solution for
can be produced:
where
and
is the weighting matrix, which can be expressed as:
In reality, the WLS algorithm described above is typically used in combination with the Newton iterative method. The unknowns in
can be obtained by the above calculation, which are used to update the results:
where
q is the iterative count.
After the iteration, is calculated and, in general, compared to a preset threshold to determine the convergence of Newton iteration algorithm. If is less than the preset threshold, this means the iterative process has converged and the results can be returned. If not, the process should return to the linearization step and repeat the iterative calculation.
5. Performance Analysis
As previously mentioned, the goal of collaboration with AOA measurements is to enhance positioning accuracy and availability for each user. In this section, the theoretical analysis of GNSS collaborative positioning accuracy is presented, including the impacts of various factors and the performance comparison with the positioning without AOA measurements.
5.1. Performance with AOA Measurements
Proposition 1. By adding AOA measurements, the CRLB of each user are always less than or equal to the previous CRLB.
Proof of Proposition 1. Firstly, the two parts are GNSS standalone positioning and collaborative positioning with only AOA measurements. Assume that each user can complete GNSS standalone positioning, which means the FIM
is an invertible matrix. According to Equations (17)–(19), the matrix
can be written as:
where:
Thus, for user #
n, the CRLB of GNSS standalone positioning can be expressed as:
where
.
Then, if the AOA measurements are added for collaboration, the FIM is
. A new matrix is defined
; thus,
and
can be expanded as:
where:
Based on the knowledge of matrix analysis [
20], it can be obtained by using the Woodbury formula:
Since
is a symmetric positive definite matrix,
is also a symmetric positive definite matrix. By applying eigenvalues decomposition,
is decomposed of eigenvectors and eigenvalues:
in which
is a diagonal matrix, which is constructed by the positive eigenvalues of
, and
is the corresponding orthogonal matrix. The matrix
is written in rows as:
Thus, it can be obtained that:
It can be known from the construction of
that it is at least a symmetric positive semidefinite matrix. Similarly, by applying eigenvalue decomposition,
is decomposed as:
where
is the diagonal matrix with non-negative eigenvalues and
is the corresponding orthogonal matrix. Meanwhile, the matrix
is a diagonal positive definite matrix; thus, it can be derived:
Define
and
. It can be seen from the construction that
is a diagonal positive definite matrix. Thus, the matrix
is defined, and it can be rewritten as:
where
is the
j-th diagonal element of
,
is the
j-th row vector of
,
and
indicates the number of collaborative users for user #
n.
Since
, so the
is also a at least a symmetric positive semidefinite matrix from the definition. Meanwhile, the matrix
is a symmetrical positive matrix. According to the properties of the positive semidefinite matrix, the diagonal elements of the matrix are all non-negative. Therefore, the following Inequation can be obtained from Equation (54):
where
and
are respectively the
j-th diagonal elements of
and
.
If the two parts are GNSS collaborative positioning with distance measurements and both types of measurements, the two FIMs are respectively:
and
. Similar to previous derivation of Inequation (61), the similar result can be obtained:
where
and
are respectively the
j-th diagonal elements of
and
.
All in all, according to the definition of CRLB for each user in Equations (31) and (51), it can be derived from Inequations (61) and (62) that by adding AOA measurements, the CRLB of each user are always less than or equal to the previous CRLB. ☐
In addition, by adding AOA measurements, the positioning availability of each user can also be improved. For user #
n in GNSS standalone positioning, the number of visible satellites must be great than or equal to four:
Extended to multi-user collaboration with AOA measurements, there is no strict limit on the number of visible satellites. The necessary condition for collaboration with AOA measurements is:
If the condition of Equation (63) is met, the Equation (64) is always fulfilled. However, conversely, if Equation (64) is met, the condition of Equation (63) may not be fulfilled. For example, there are two users in the network, and each user can see three satellites. At this moment, the Equation (63) is not met. However, if the two users can collaborate with each other, it can be derived that:
which means the positioning availability of each user is improved by collaboration.
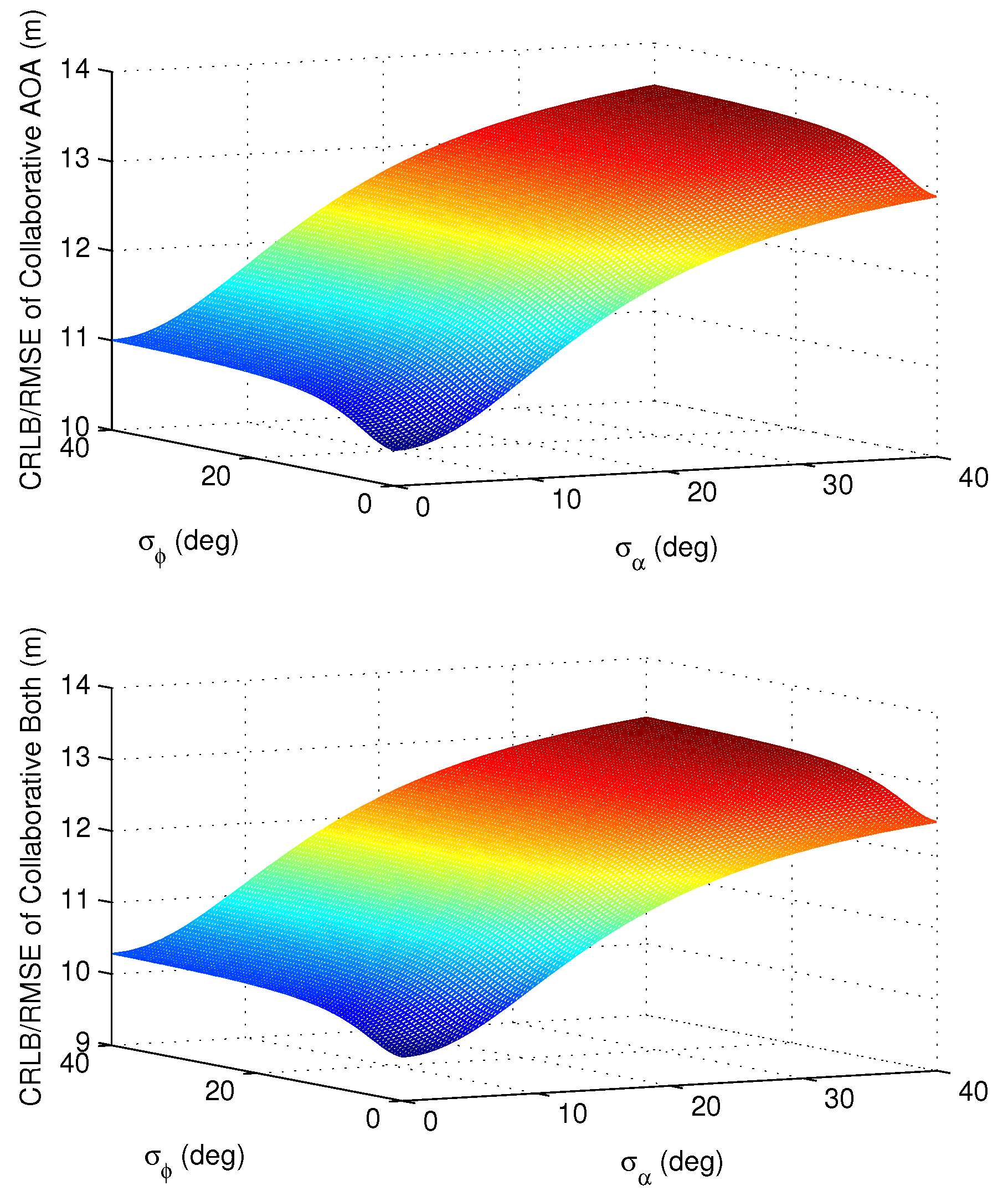
5.2. The Impact of AOA Measurements Accuracy
Proposition 2. The CRLB of each user increase with the increasing of AOA measurement errors, and when the AOA measurement errors are big enough, the collaboration does not bring any benefit.
Proof of Proposition 2. In this subsection, we assume that two different AOA measuring technologies are used, and the corresponding measured variances respectively are and . Under the two different variances, the two corresponding FIMs are denoted as and , respectively.
In the first case, the two parts are GNSS standalone positioning and collaborative positioning with only AOA measurements. Therefore, the following Inequation can be obtained from Equation (54):
where:
and
is a diagonal matrix, which is expressed as:
Denote by
the
j-th diagonal element of
; thus, it can be derived:
If
and
, then it can be obtained that
, and the matrix (
) is a symmetric positive semidefinite matrix. According to the properties of positive semidefinite matrix, we get:
where
and
are the
j-th diagonal elements of
and
, respectively.
Meanwhile, when
and
are big enough, the matrix
tends to a zero matrix. Thus, it can be derived from Equation (54) that:
If the two parts are GNSS collaborative positioning with distance measurements and collaborative positioning with both distance and AOA measurements, similar results can also be obtained.
According to the definition of CRLB for each user in Equation (31), it can be derived that the CRLB of each user increase with the increasing of AOA measurement errors, and when the measurement errors are big enough, the collaboration does not bring any benefit. ☐
5.3. The Impacts of the Number of Users and Collaborative Links
Proposition 3. If a new collaborative link is added to the user network, the CRLB of each user are always less than or equal to the previous values.
Proof of Proposition 3. For GNSS collaborative positioning, if a new collaborative link between the
k-th user and the
n-th user is added to the user network, the new FIM is defined by
, and it can be written as:
where:
The matrix equals for the collaborative positioning with only AOA measurements and equals for the collaborative positioning with distance and AOA measurements. Since the AOA measurements technologies of different users may be different, the variance of measurement errors may not be equal. For instance, and may not be equal.
It can be known from the construction that
is a symmetric positive semidefinite matrix. Thus, by using the Woodbury formula, we get:
Therefore, the similar derivation and result of Inequation (61) can be obtained:
where
and
are the
j-th diagonal elements of matrix
and
, respectively.
In the physical sense, it does mean if a new collaborative link is added to the user network, the CRLB of each user are always less than or equal to the previous values. ☐
Proposition 4. If a new user and its collaborative links are added to the user network, the CRLB of each user are always less than or equal to the previous values.
Proof of Proposition 4. It is assumed that a new user #
y and its collaborative links are added to the user group; the new FIM is defined by
, and it can be written as:
where:
It can be known from the construction that
is a symmetric positive semidefinite matrix. By using the Woodbury formula, we get:
Therefore, the similar derivation and result of Inequation (61) can be obtained:
where
and
are the
j-th diagonal elements of matrix
and
, respectively. This means that if a new user and its collaborative links are added to the user network, the CRLB of each user are always less than or equal to the previous values. ☐
7. Experiment Results
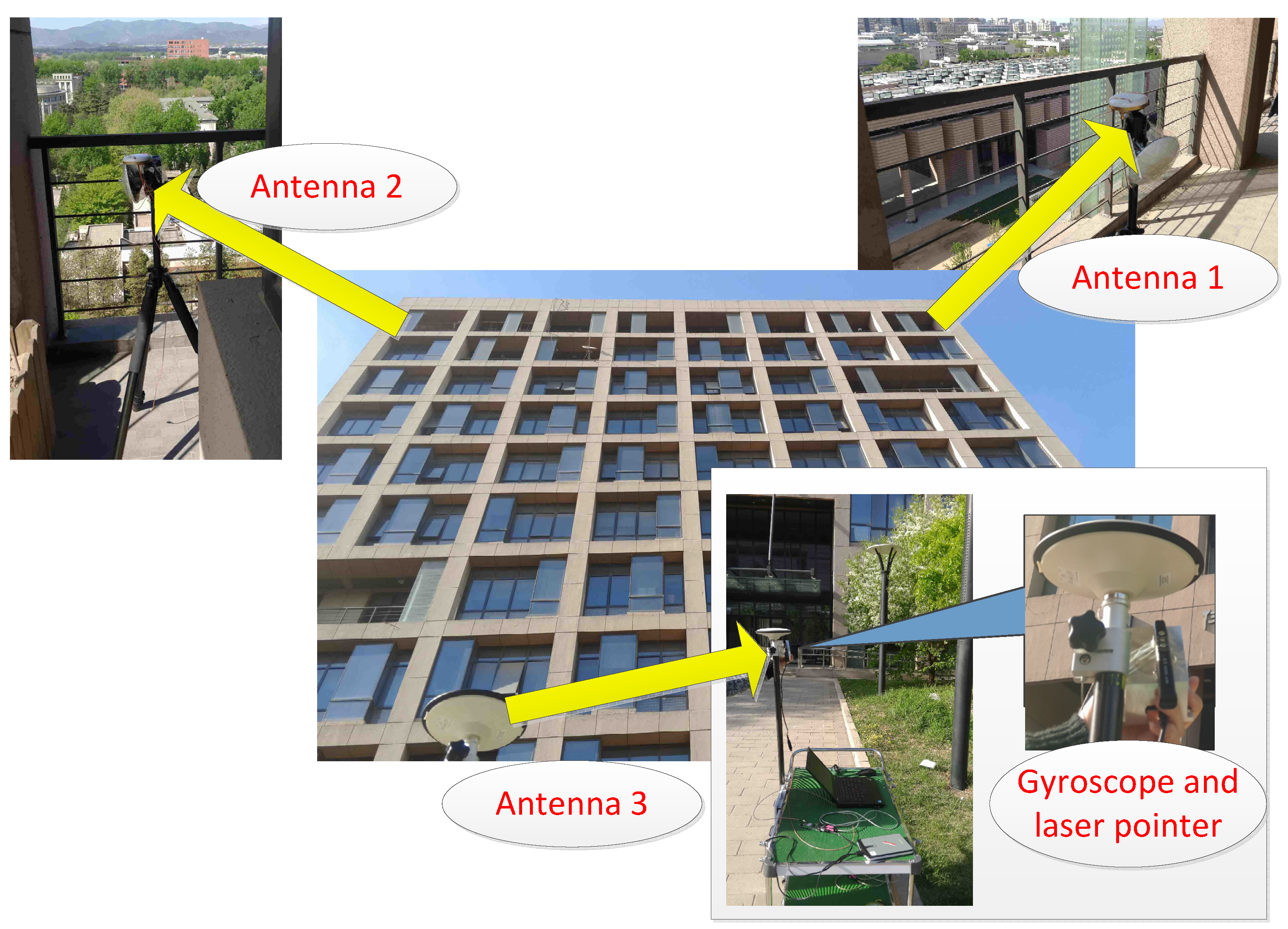
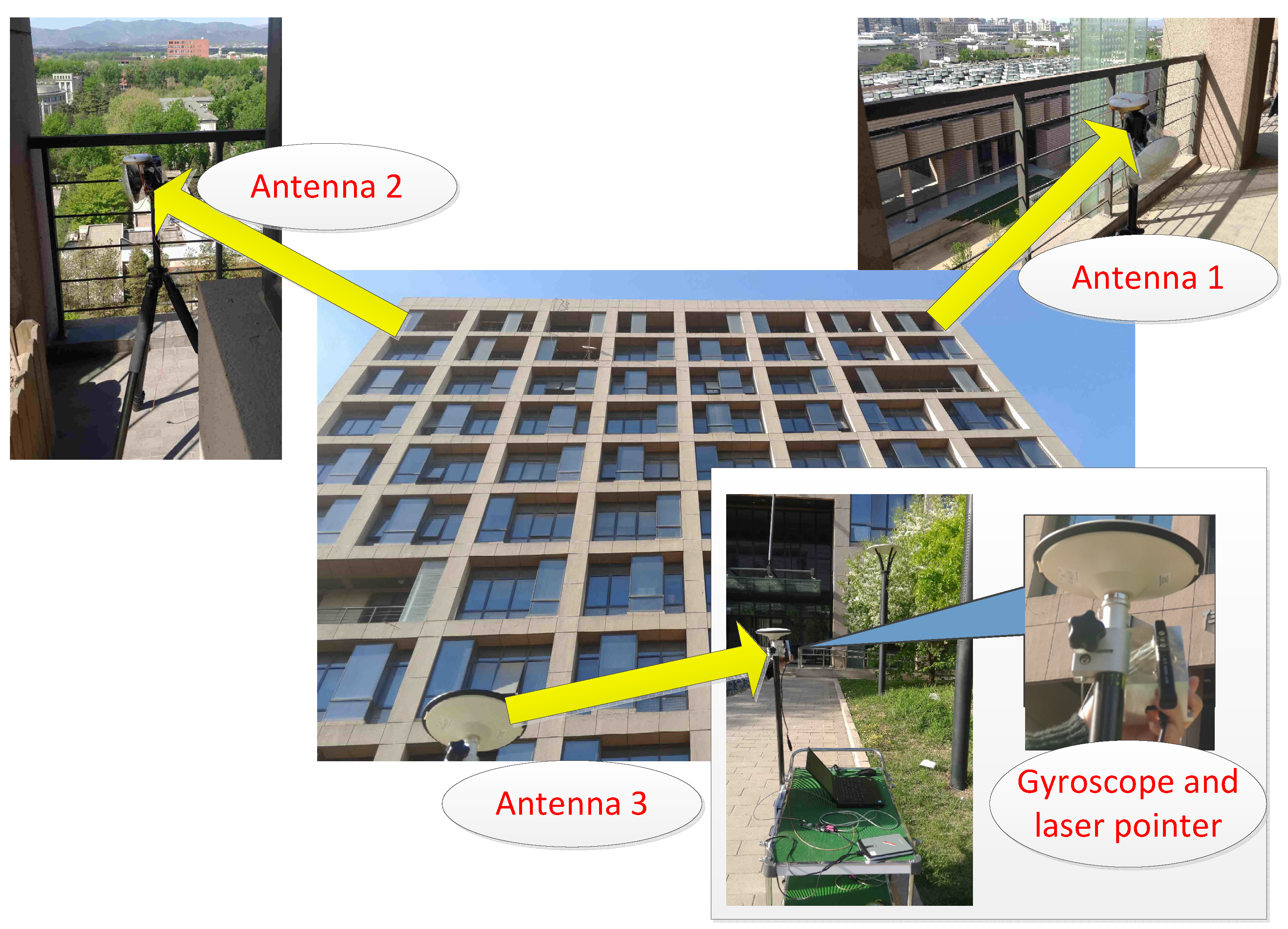
In this section, the derived analytical results are evaluated by using actual signals. The antennas are laid on the balcony and the south side of Weiqing Building of Tsinghua University in Beijing, China, and three u-blox receivers are used to process GNSS signals.
Figure 11 shows the actual signal experiment scenario, which contains three users and the AOA measuring equipment.
In this experiment, the position of user #3 is taken as the origin of the reference system, and the Earth Centered Earth Fixed (ECEF) coordinate is
; the relative positions of the other two users, expressed in ENU coordinates, are shown in
Table 3.
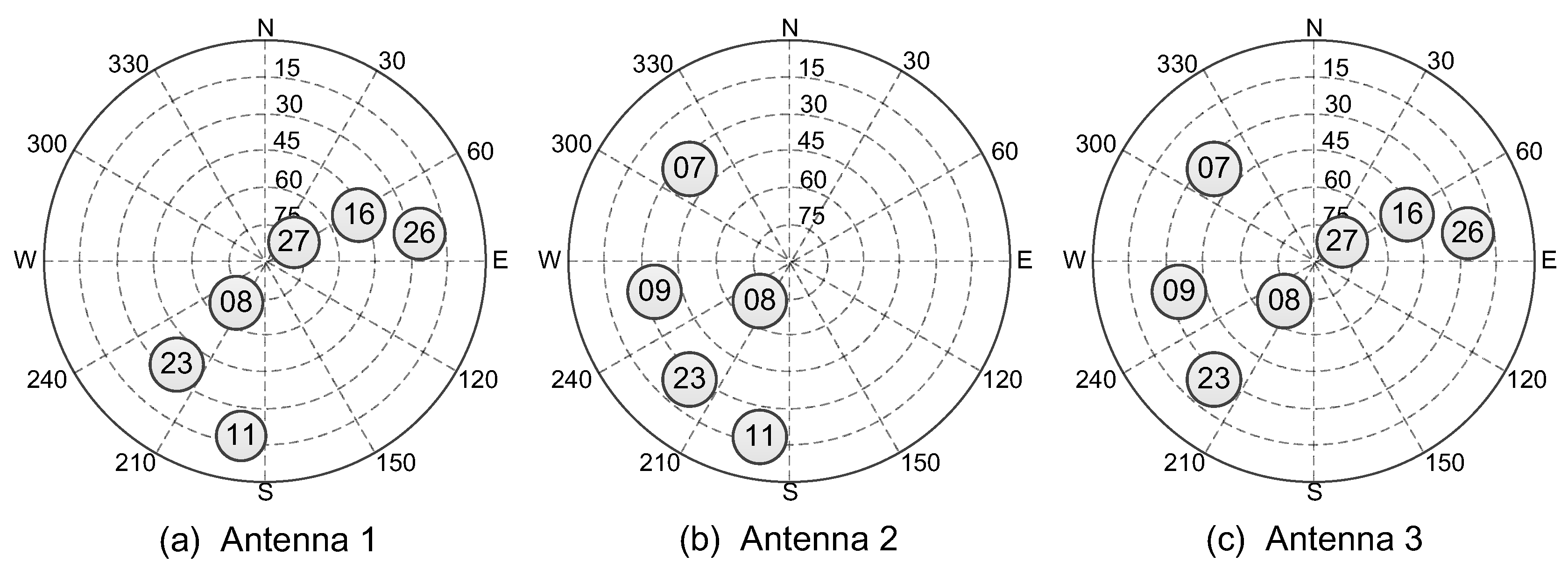
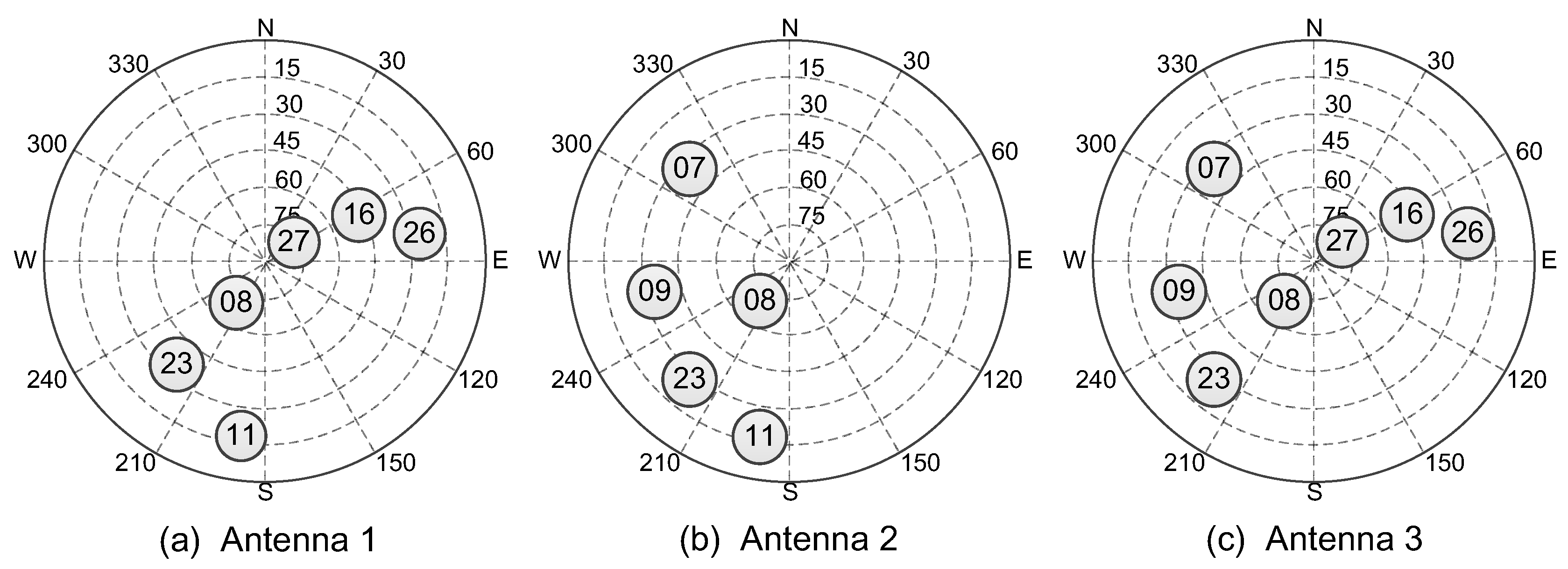
Figure 12 shows the visible satellites of each antenna during the experiment period. It can be seen that, due to occlusion, the number of visible satellites has decreased for each user, and the poor distribution of the satellites would cause the large dilution of precision (DOP) values and poor positioning accuracy in GNSS standalone positioning.
Generally, the AOA measurements are obtained by applying the antenna arrays, and the measurement accuracy is less than 10°. In this paper, due to the limitation of the experimental conditions, a simpler alternative method has been adopted. A gyroscope and a laser pointer are used to measure the AOA measurements. The laser pointer is bound on a gyroscope around an antenna, and the laser pointer is pointed to another antenna manually. During this process, the AOA measurements can be obtained from the gyroscope, and the measurement accuracy is less than 1°. Due to the simulation results in
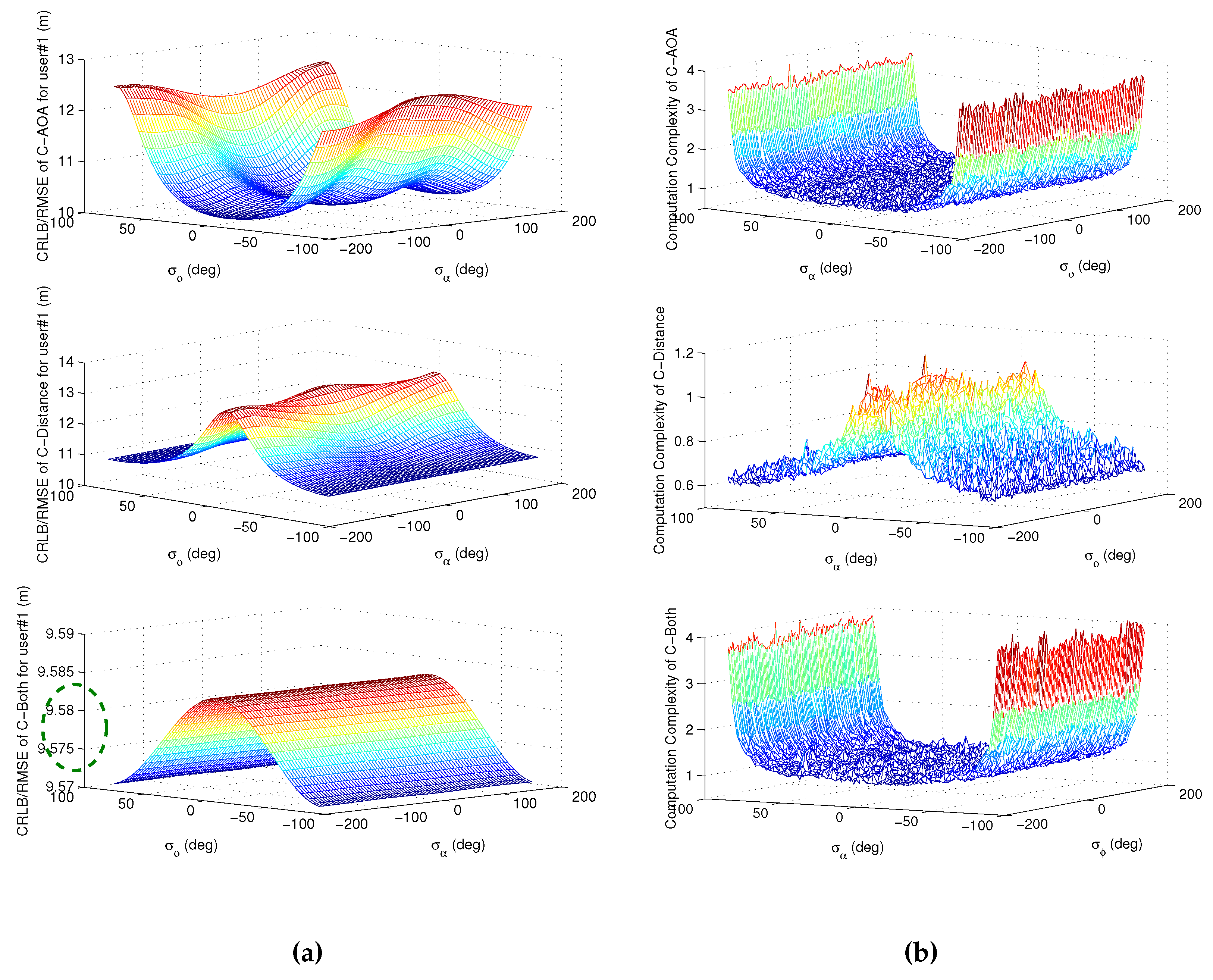
Figure 6, the impact of the angle measurements accuracy is relatively small when the standard deviations of angle measurements are less than 10°. Thus, the performance of collaborative positioning based on our experimental equipment is similar to the results based on antenna arrays.
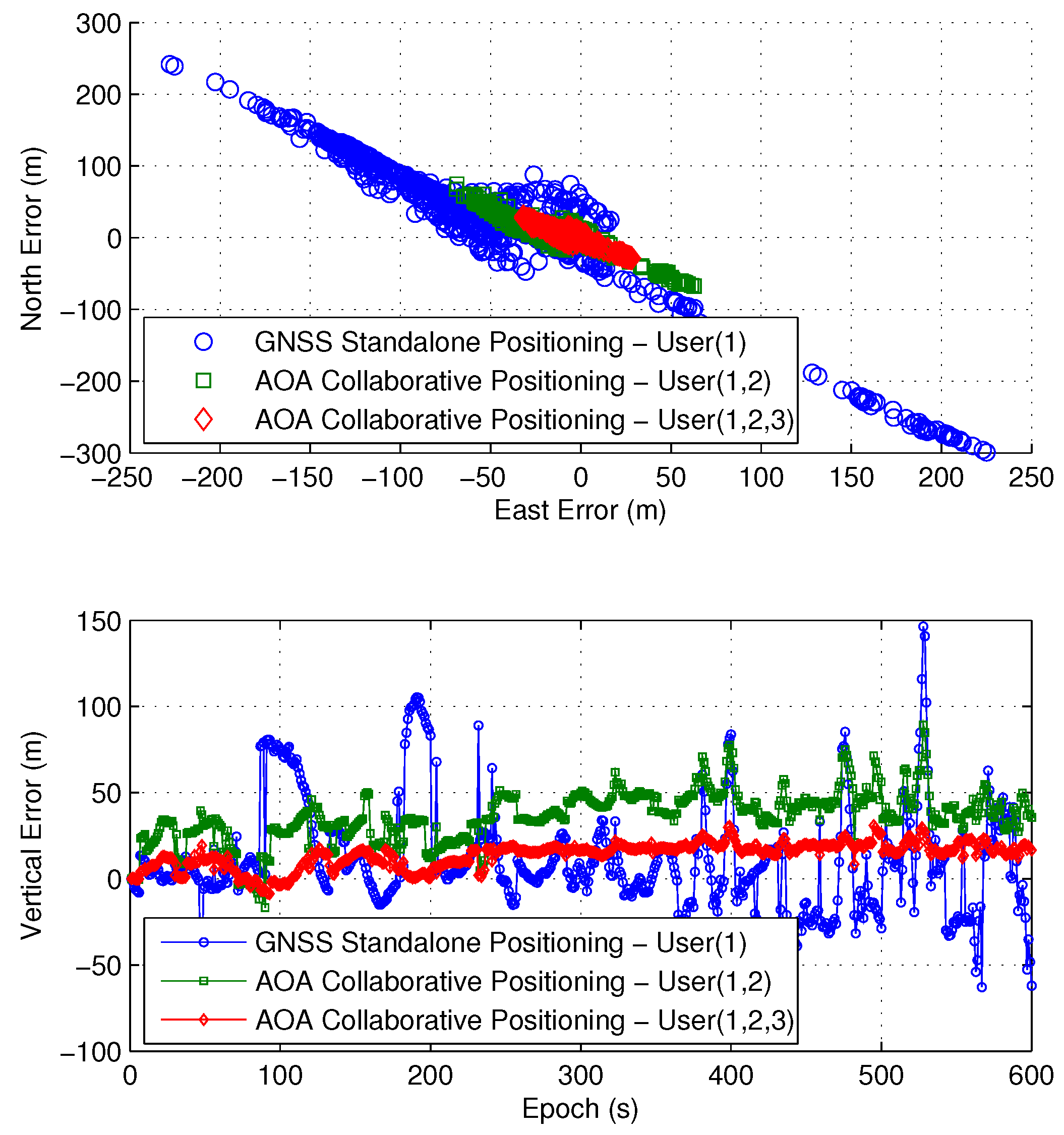
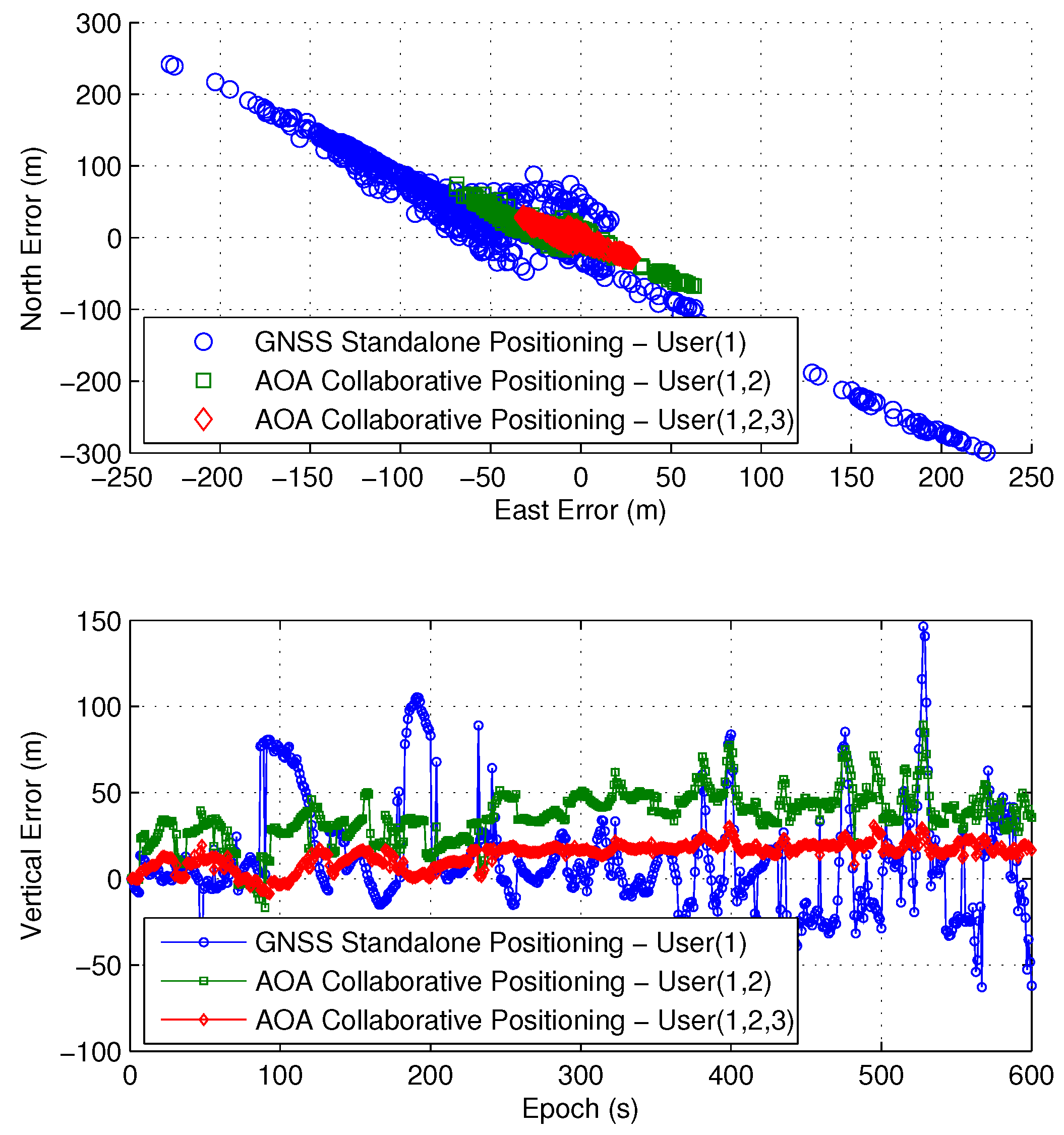
Under this actual experiment scenario, the GNSS collaborative positioning test is carried out with pseudo-range measurements and AOA measurements. For user #1,
Figure 13 shows the positioning results of actual data experiment over 600 seconds, and the statistical results are given in
Table 4.
It can be seen that, when user #1 works alone in this harsh environment, the positioning error can reach hundreds of meters, which is very large and cannot meet the demand for most GNSS applications. While by collaboration with AOA measurements, the positioning error can be significantly reduced. Meanwhile, the positioning accuracy increases with the increase of the number of users, which is also consistent with the derived analytical results.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}