
Position Accuracy Improvement by Implementing the DGNSS-CP Algorithm in Smartphones




Abstract
:1. Introduction
2. Previous Work and Contributions
2.1. Previous Work
2.2. Motivations and Contributions
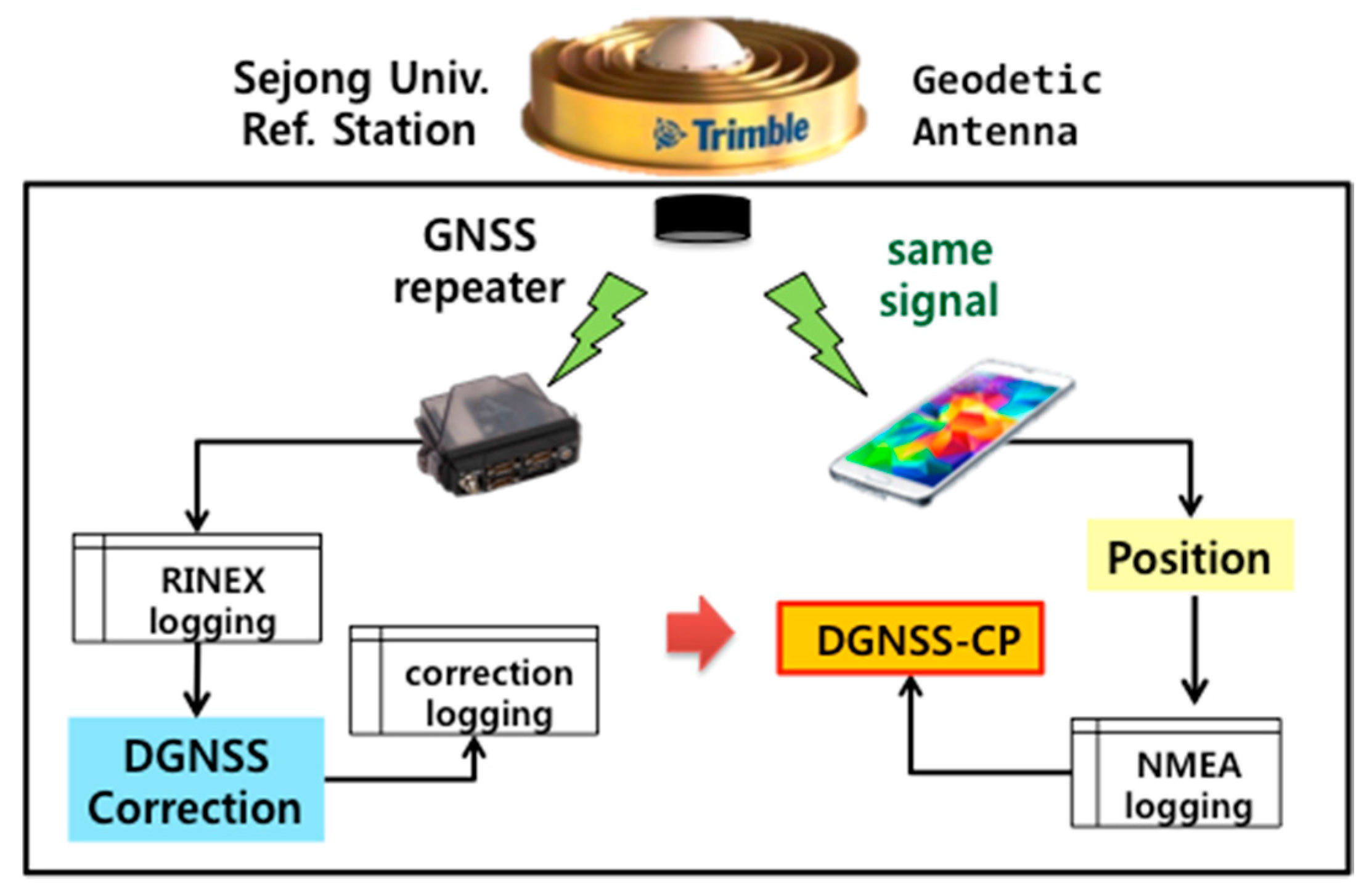
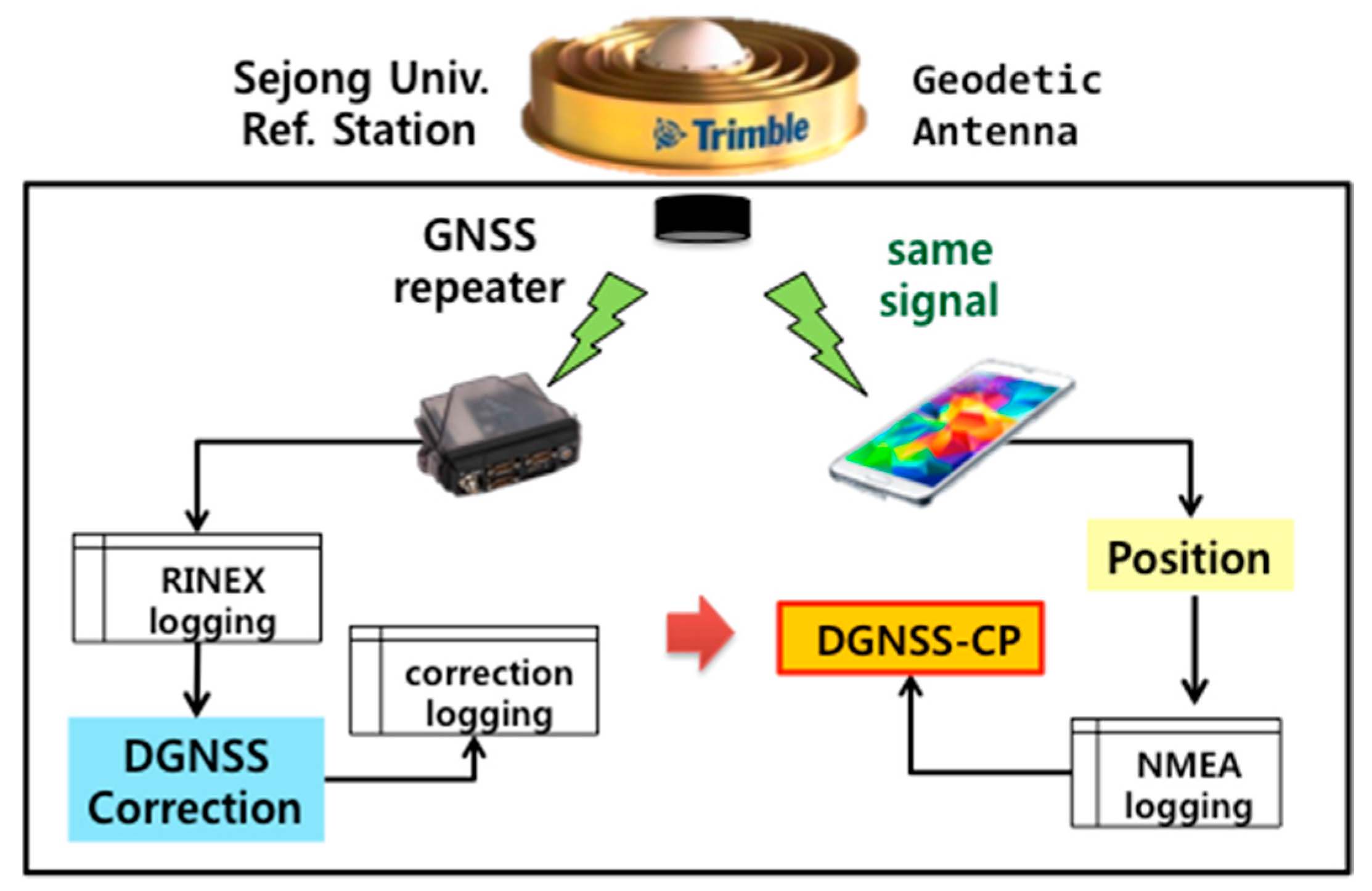
3. Approach and Implementation
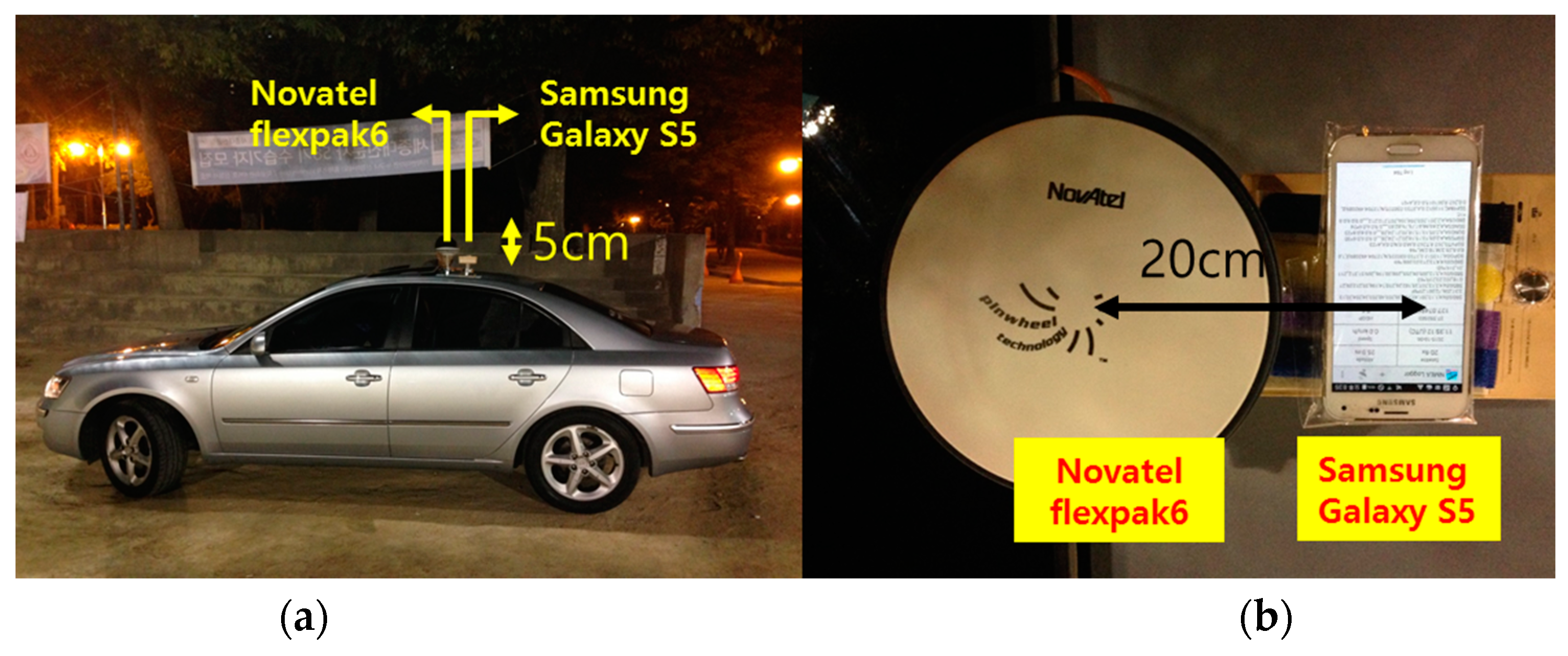
3.1. Target Smartphone Specification
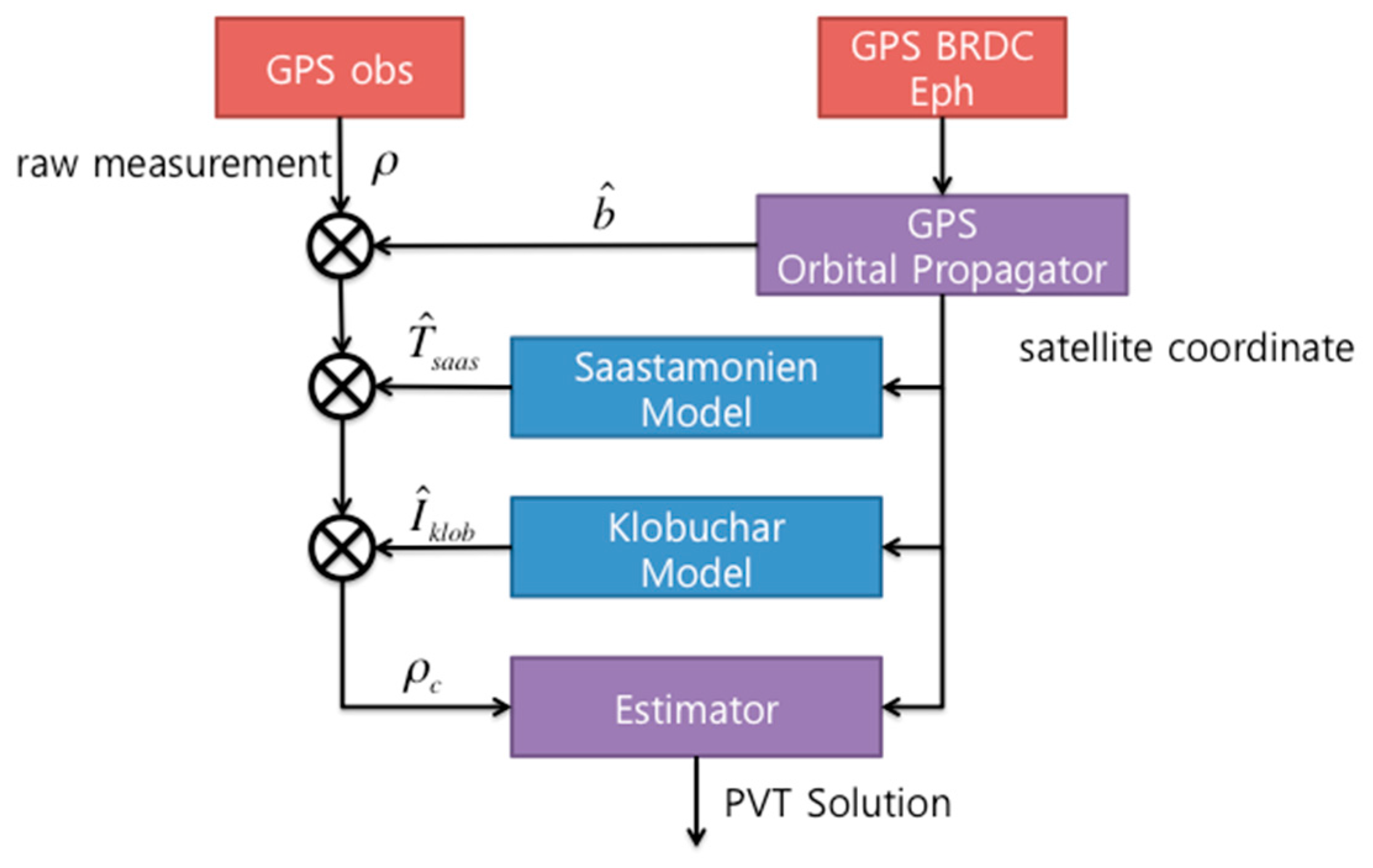
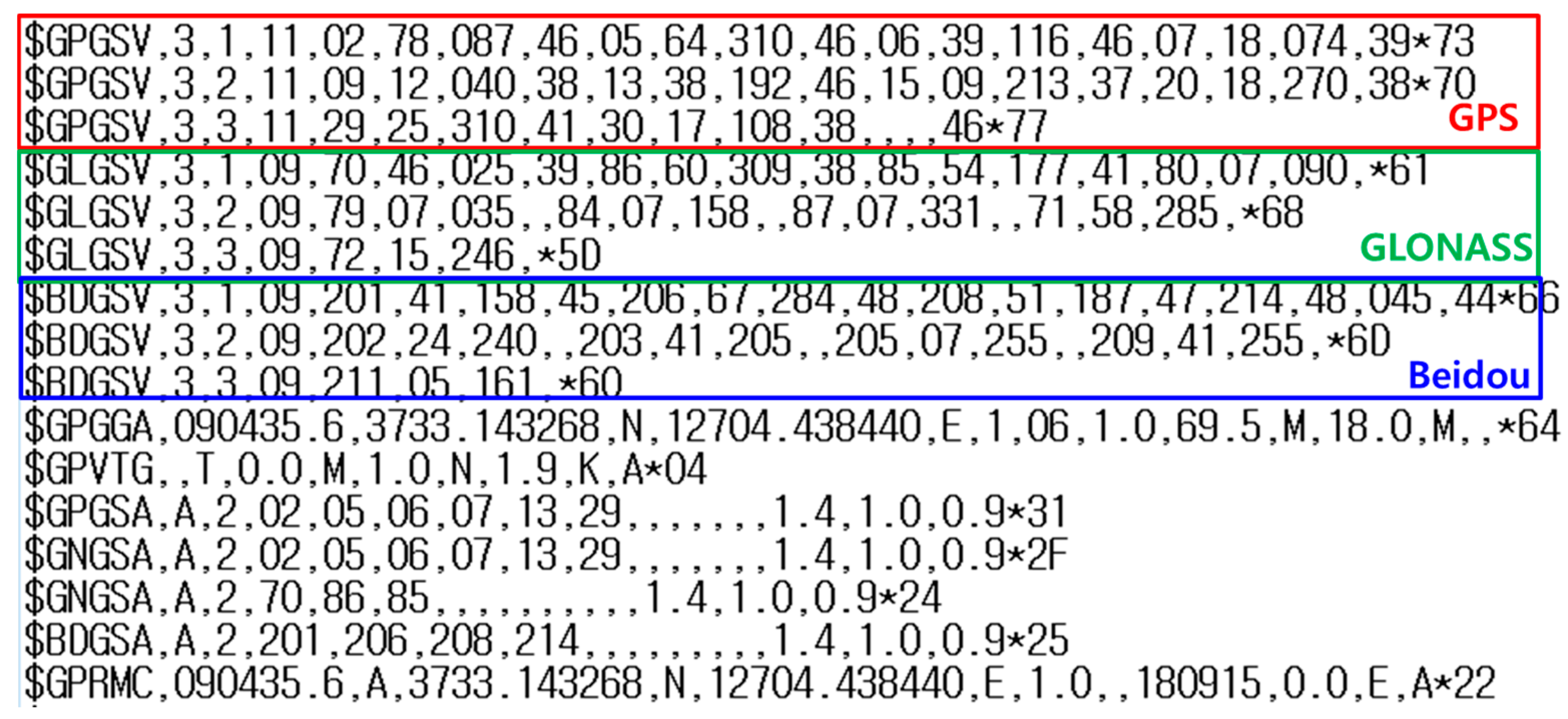
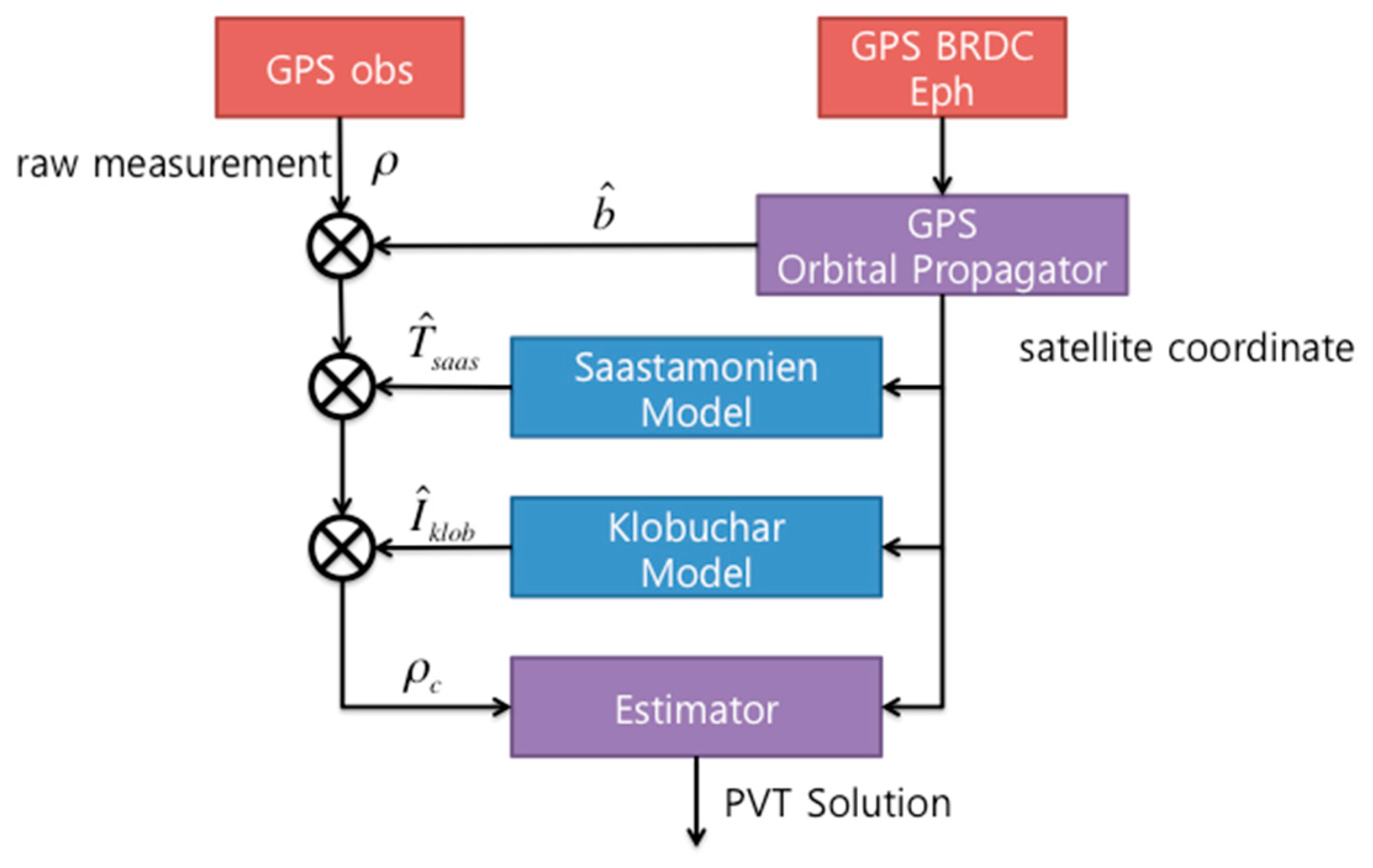
3.2. Single Point Positioning Algorithm of the Smartphone
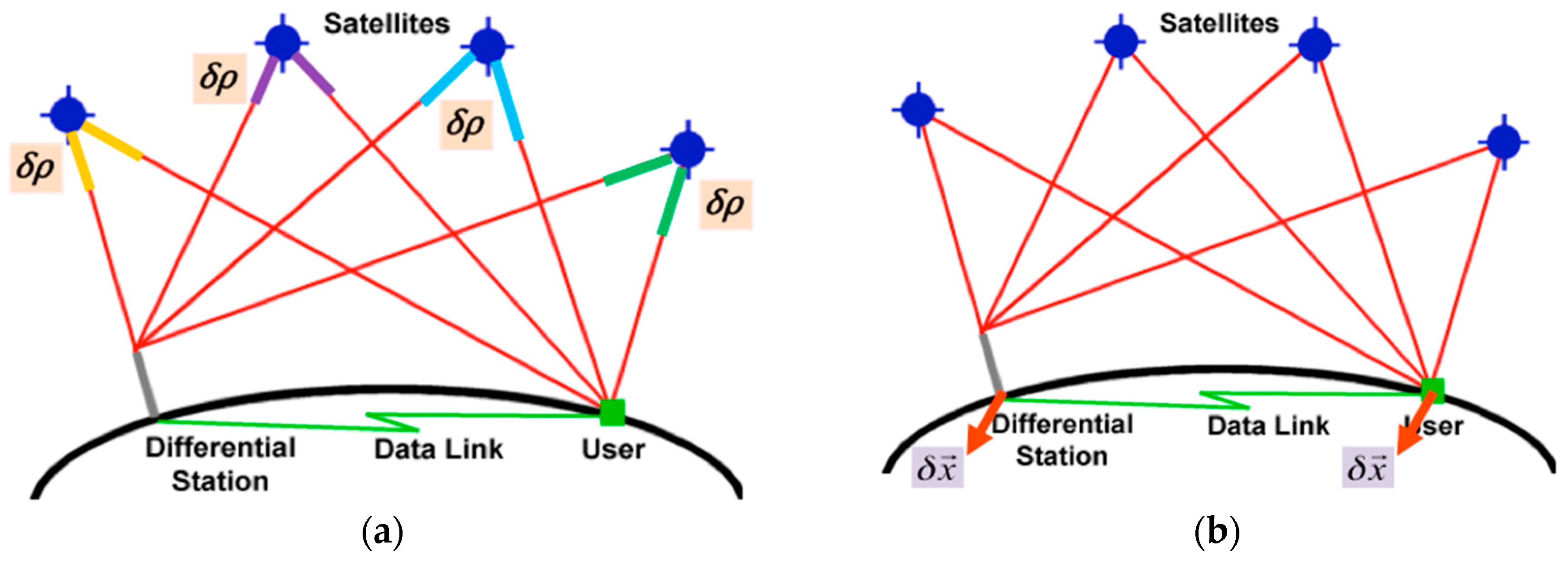
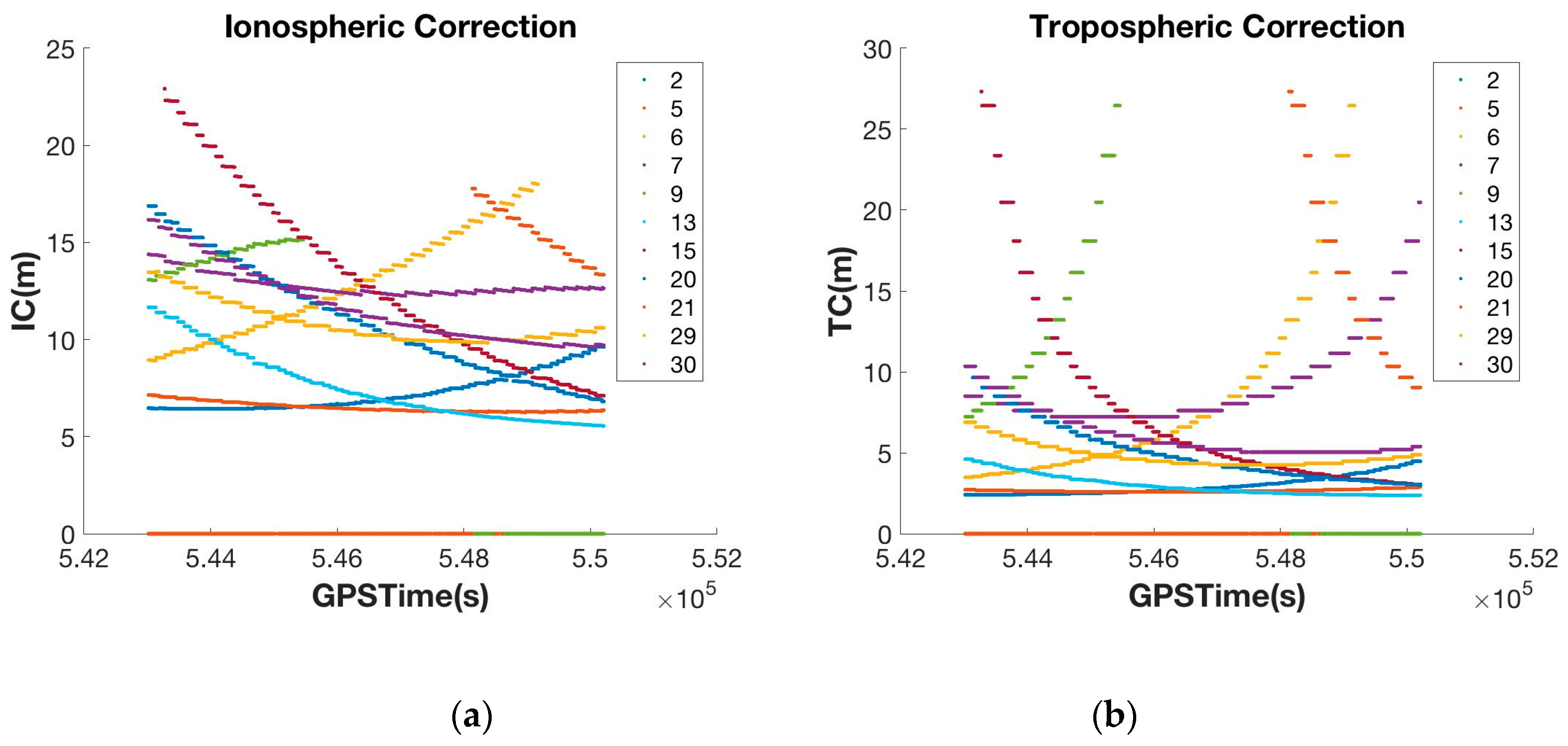
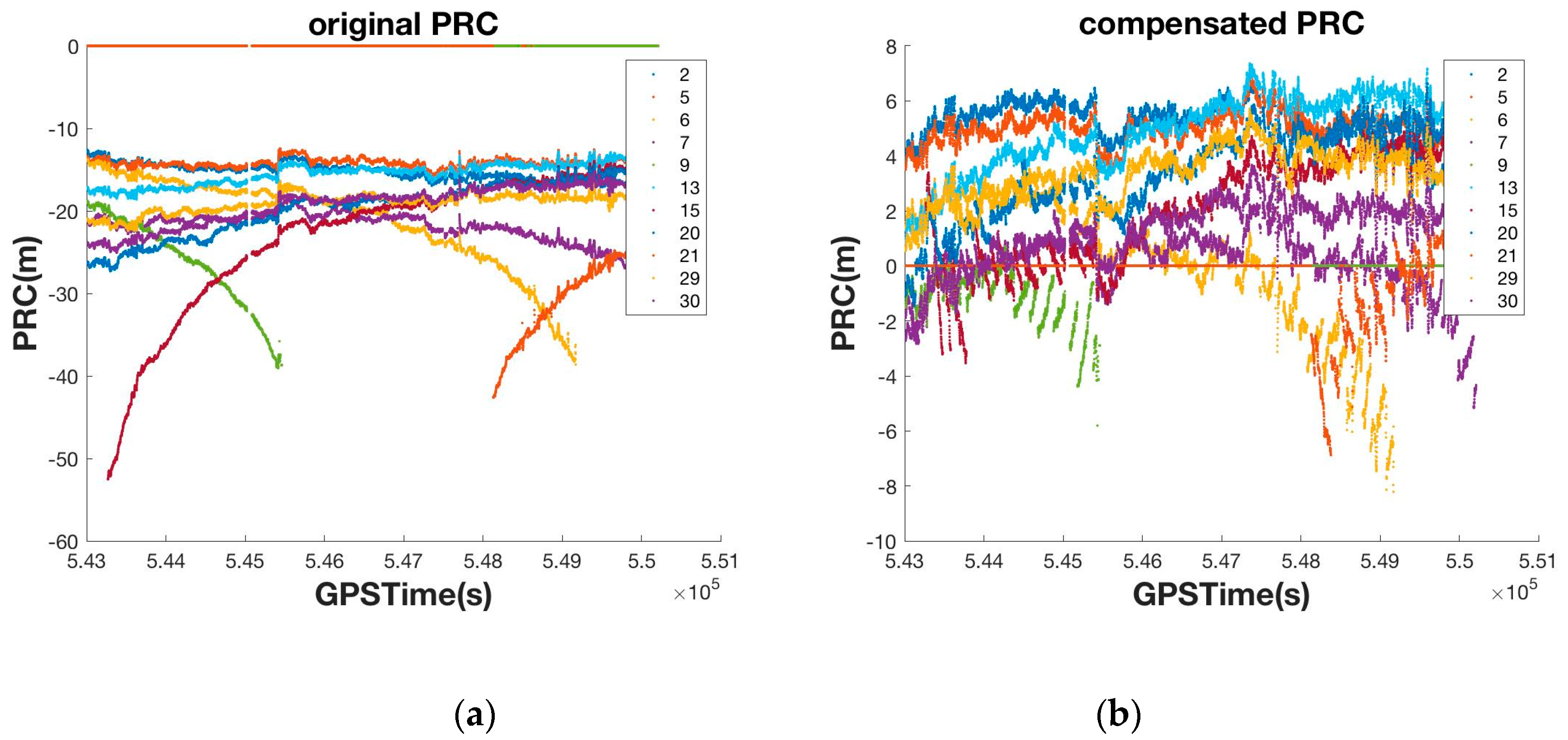
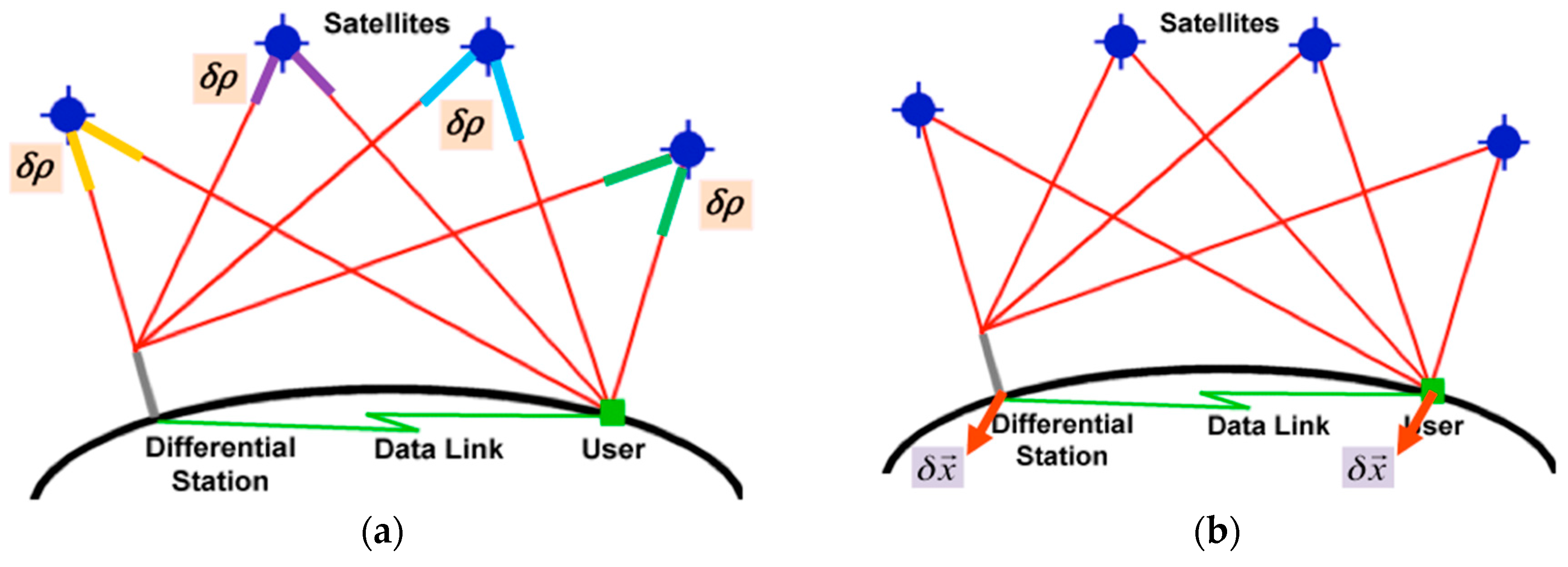
3.3. DGNSS-CP Algorithm for Android Smartphone
| : | Range-domain PRC for i-th satellite |
| : | estimated distance from RS to i-th satellite |
| : | estimated clock bias of RS |
| : | estimated clock bias of i-th satellite |
| : | pseudorange measurement for the i-th satellite received at RS |
| : | DGPS coordinates of the rover |
| : | clock bias of the DGPS rover receiver |
| : | line-of-sight unit vector of the i-th satellite in Earth-centered, Earth-fixed (ECEF) frame |
| : | vector from the receiver to the i-th satellite |
| : | observation matrix = |
4. Experiments and Results
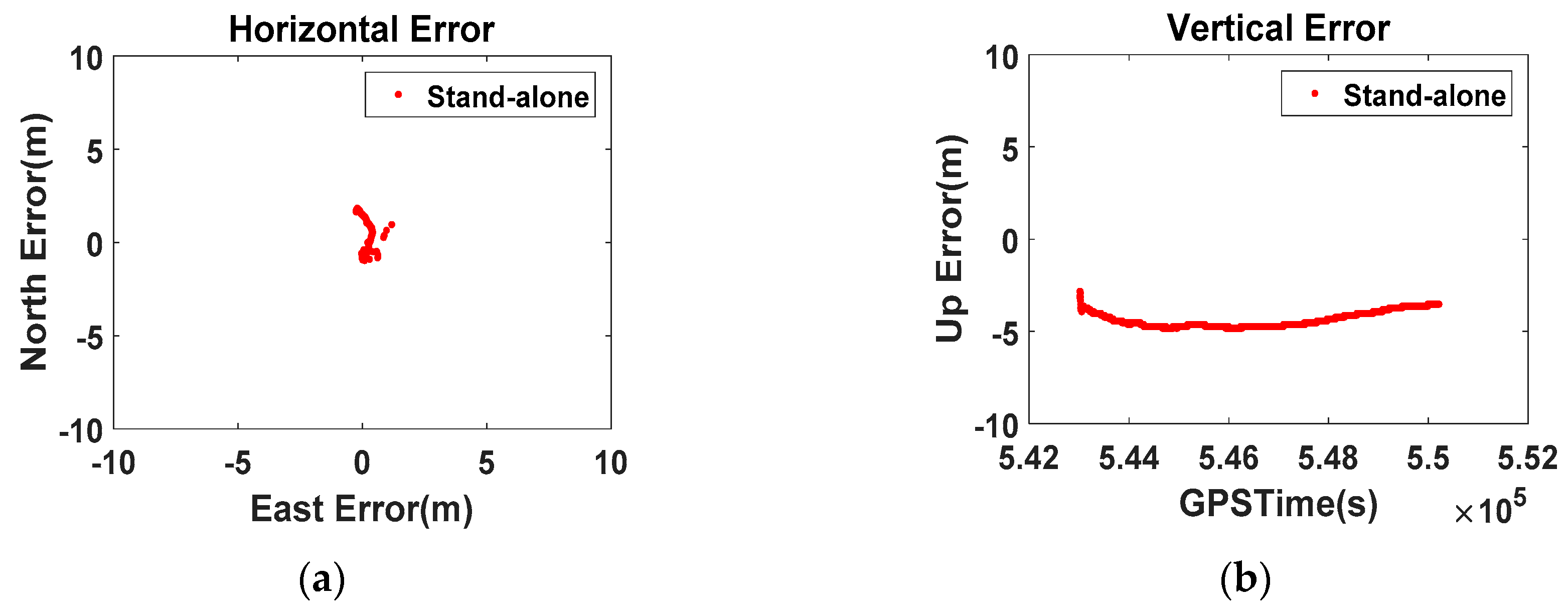
4.1. Preliminary Test
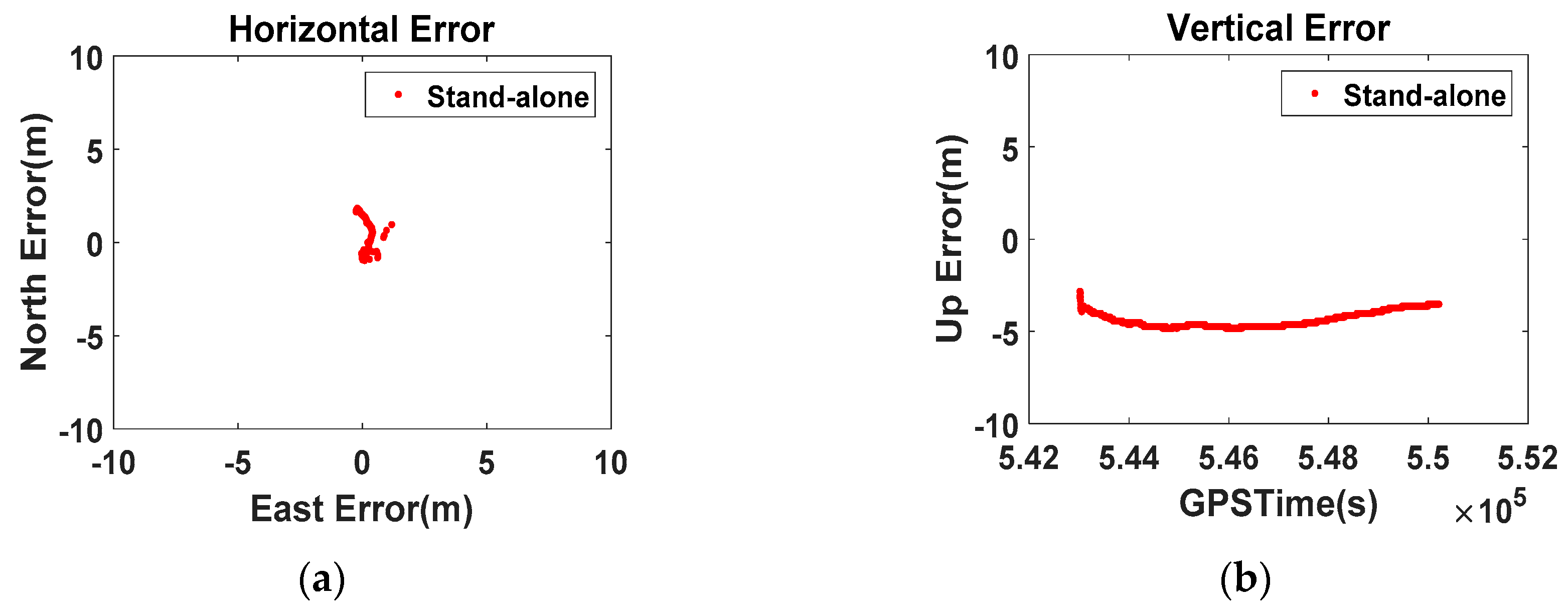
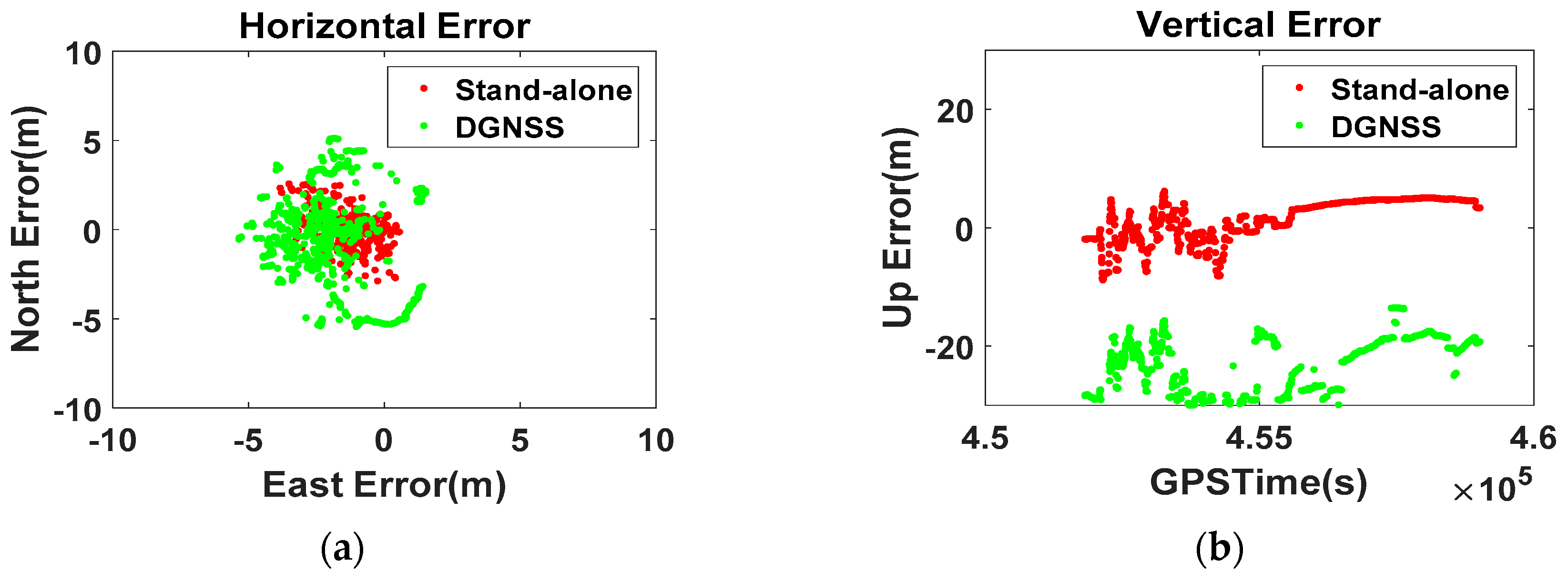
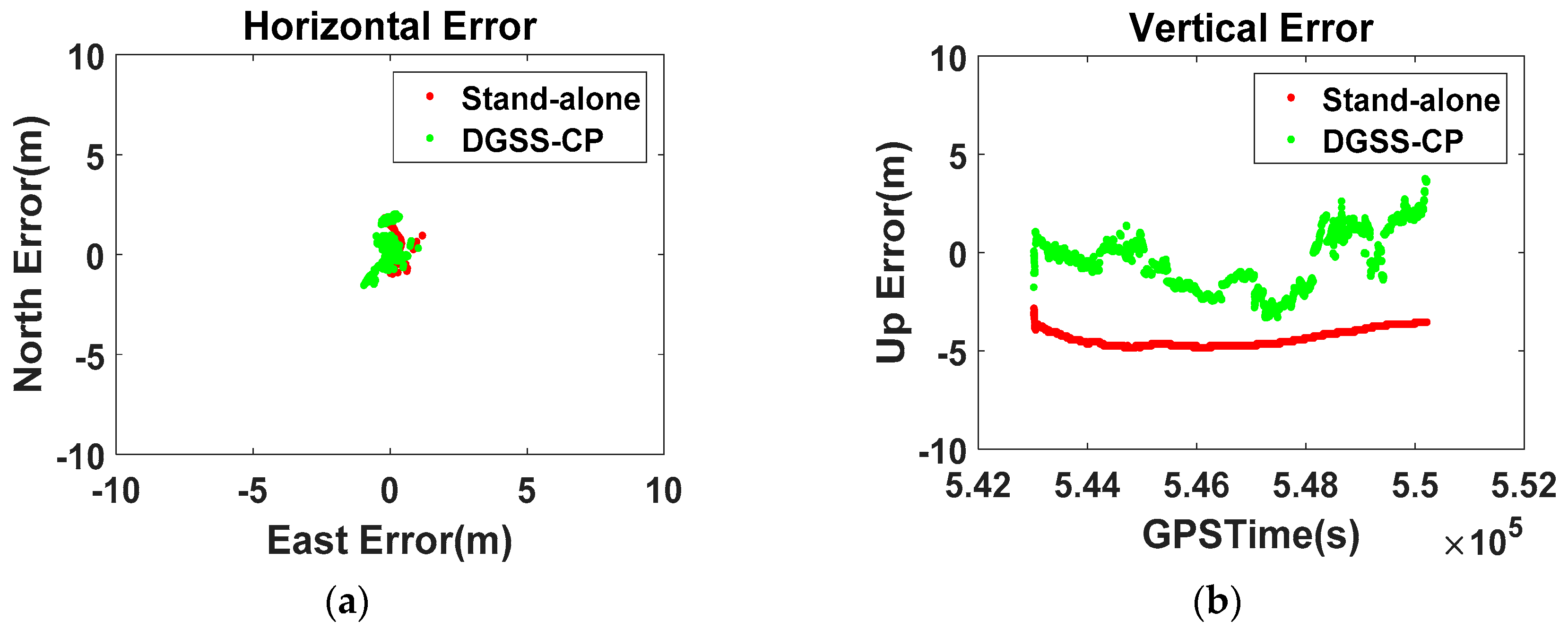
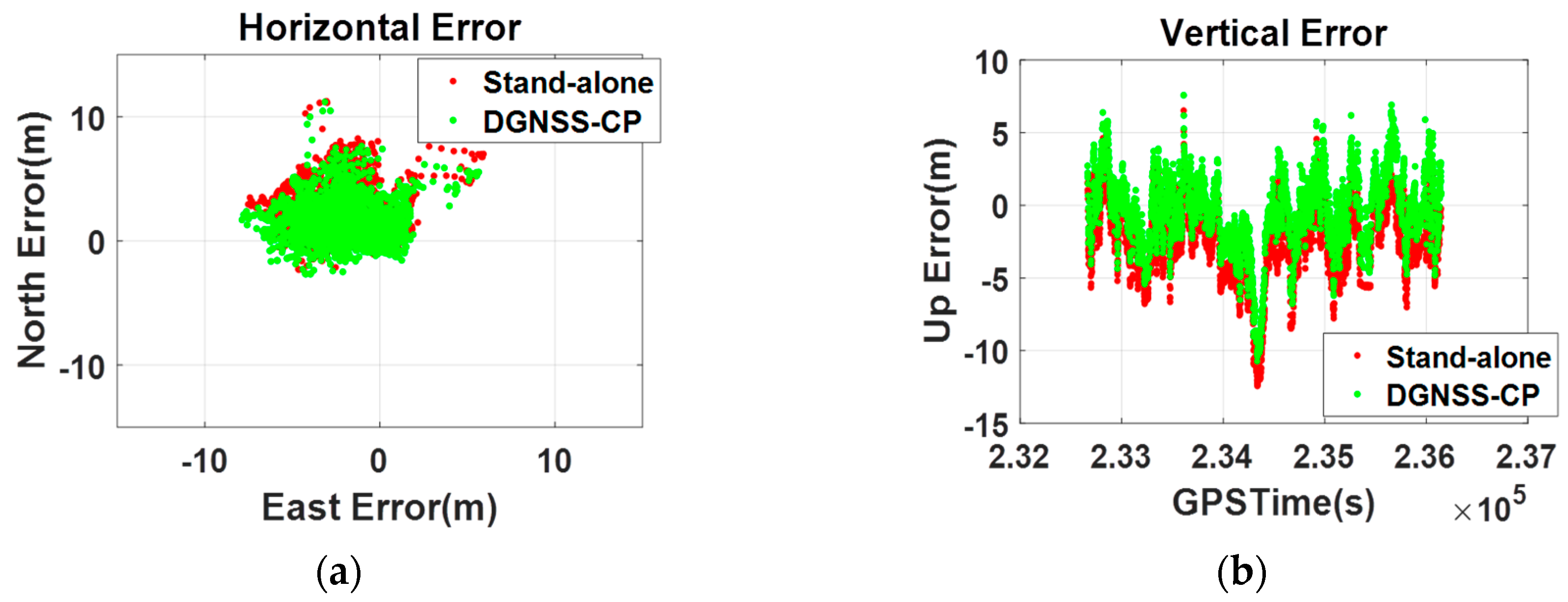
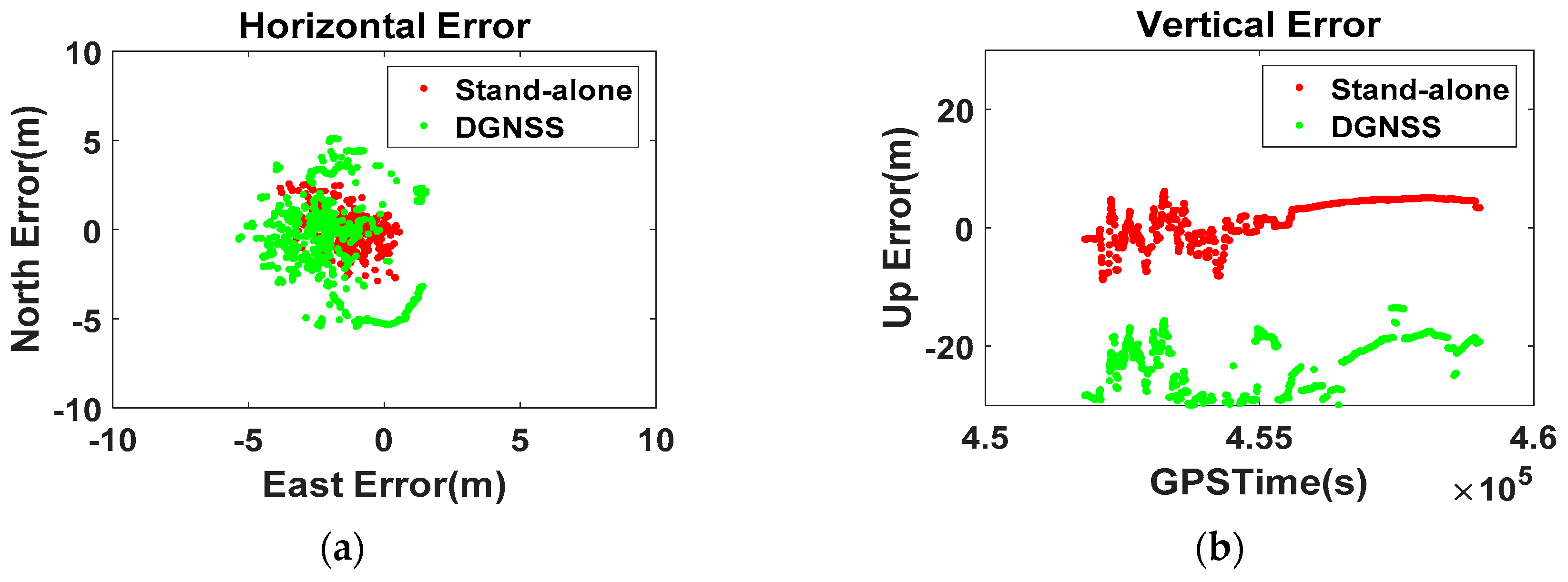
4.2. Static Test
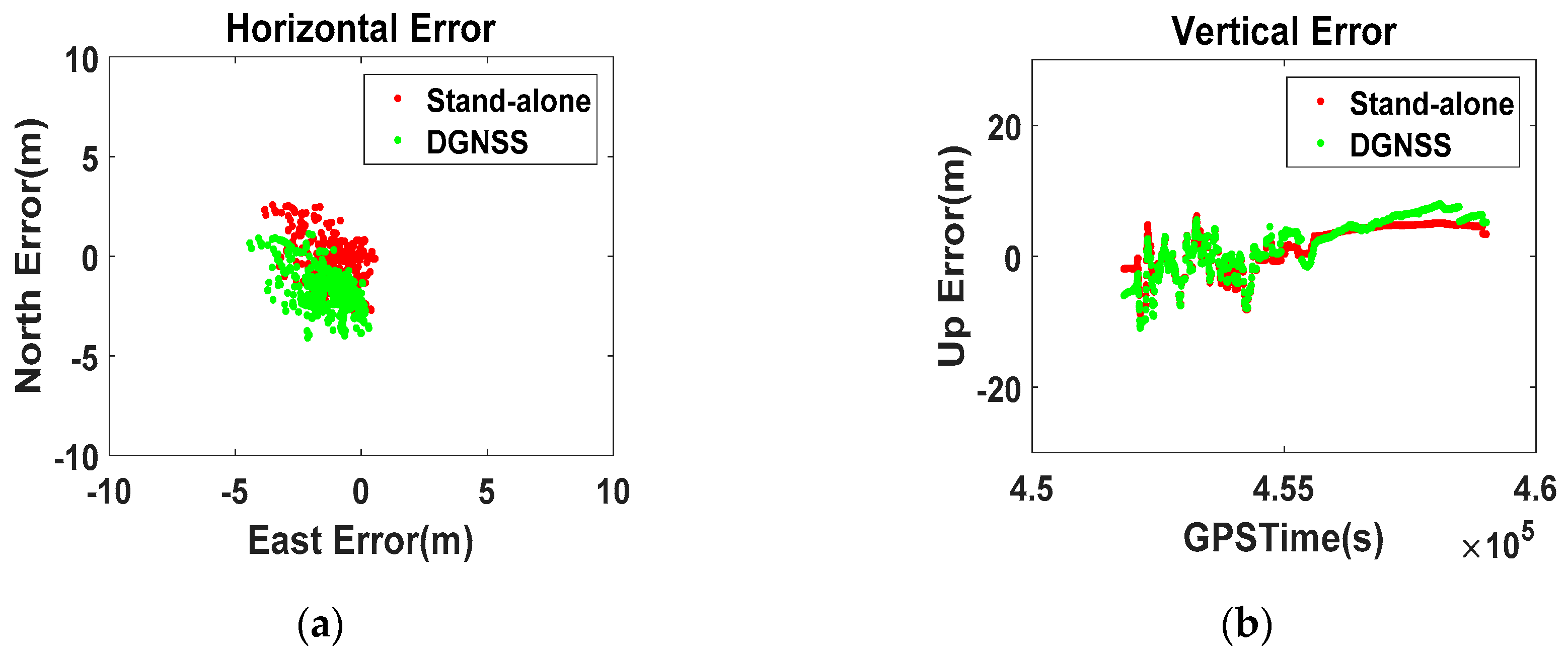
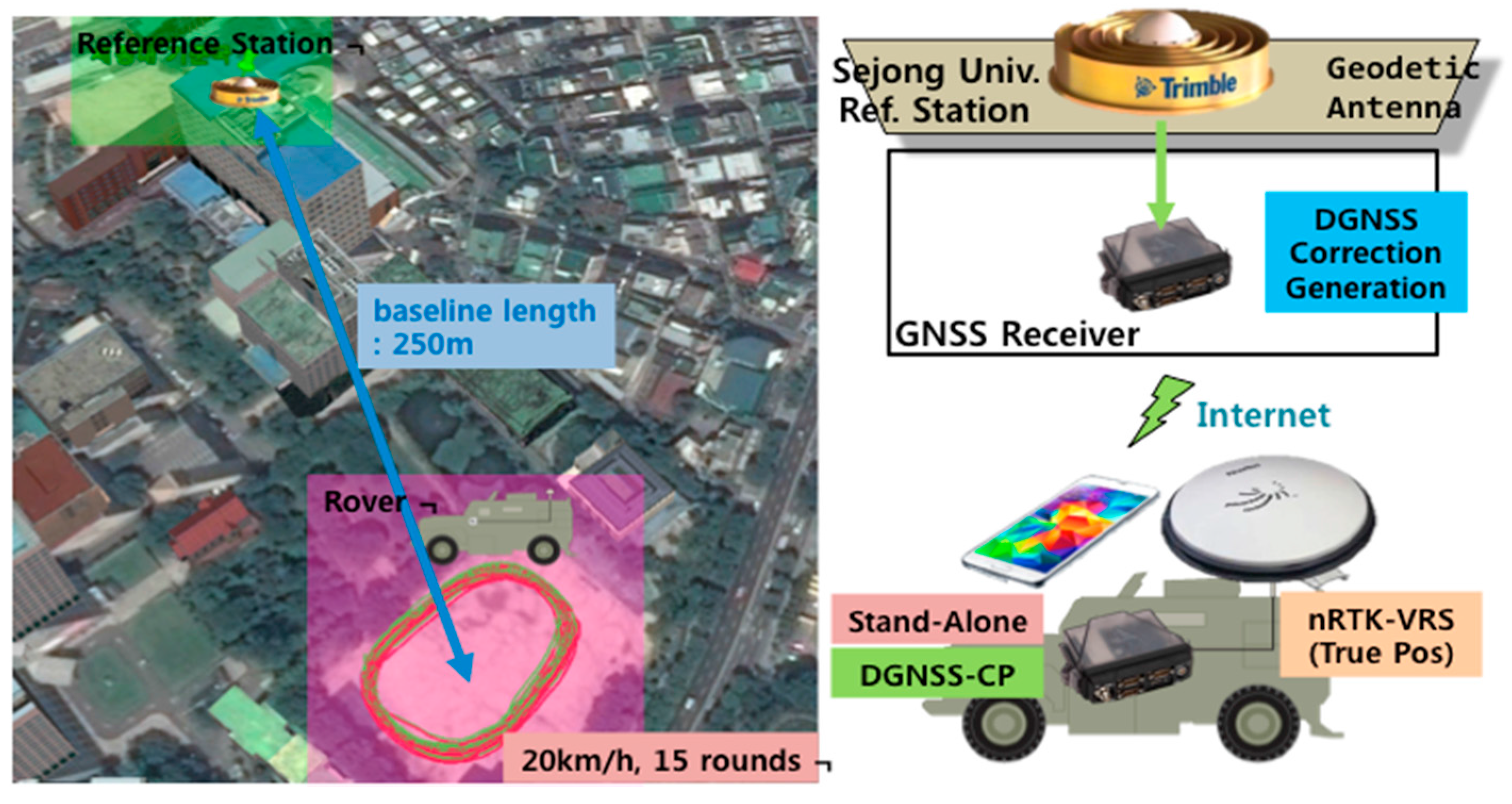
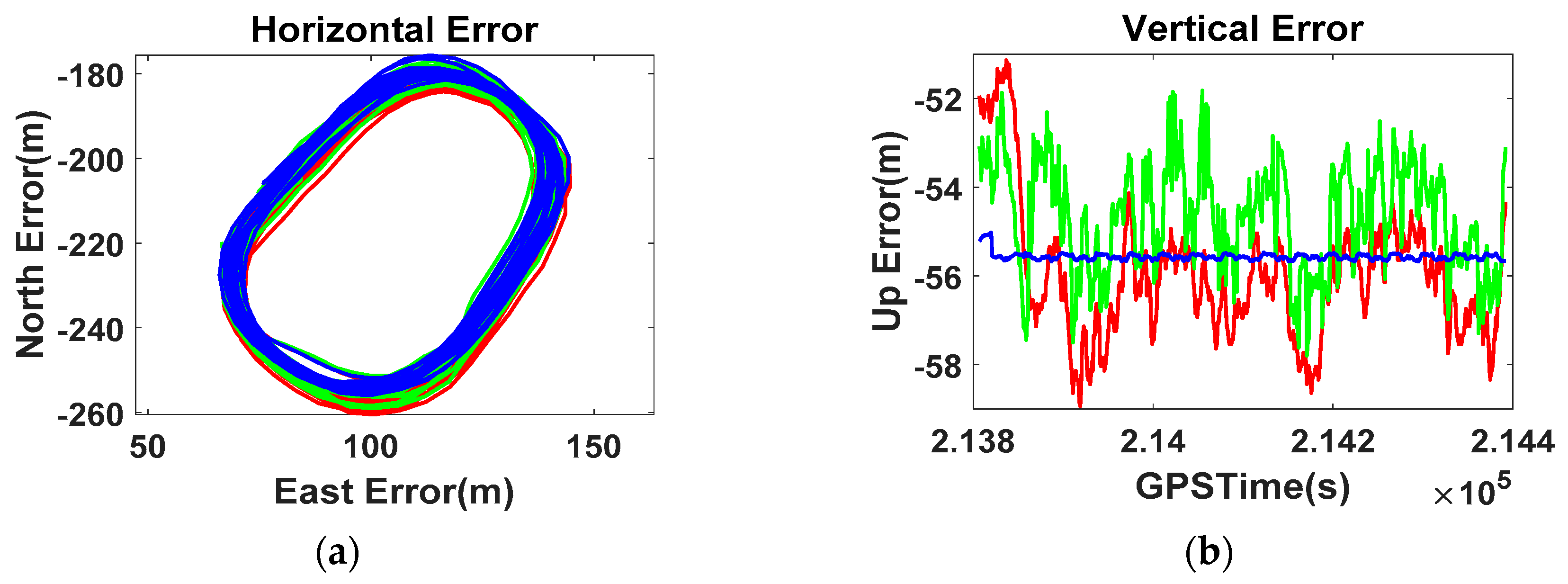
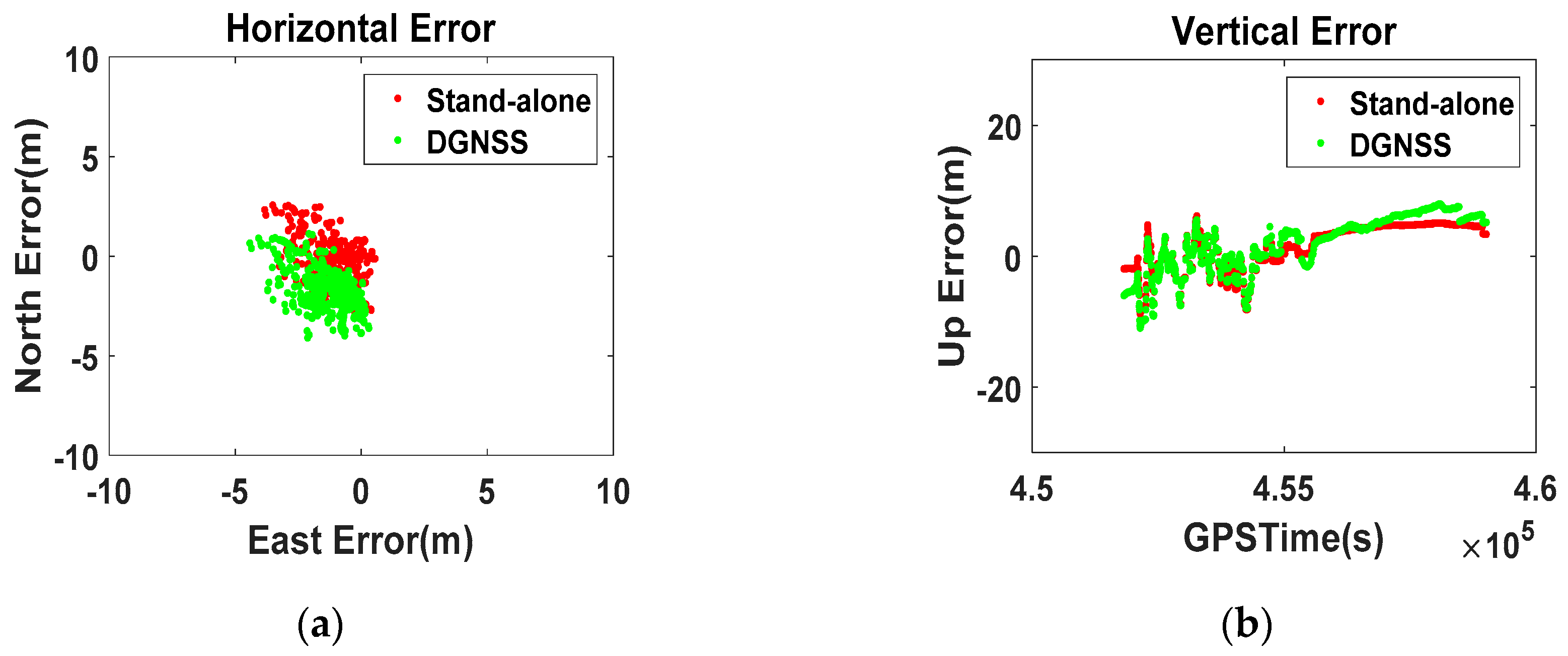
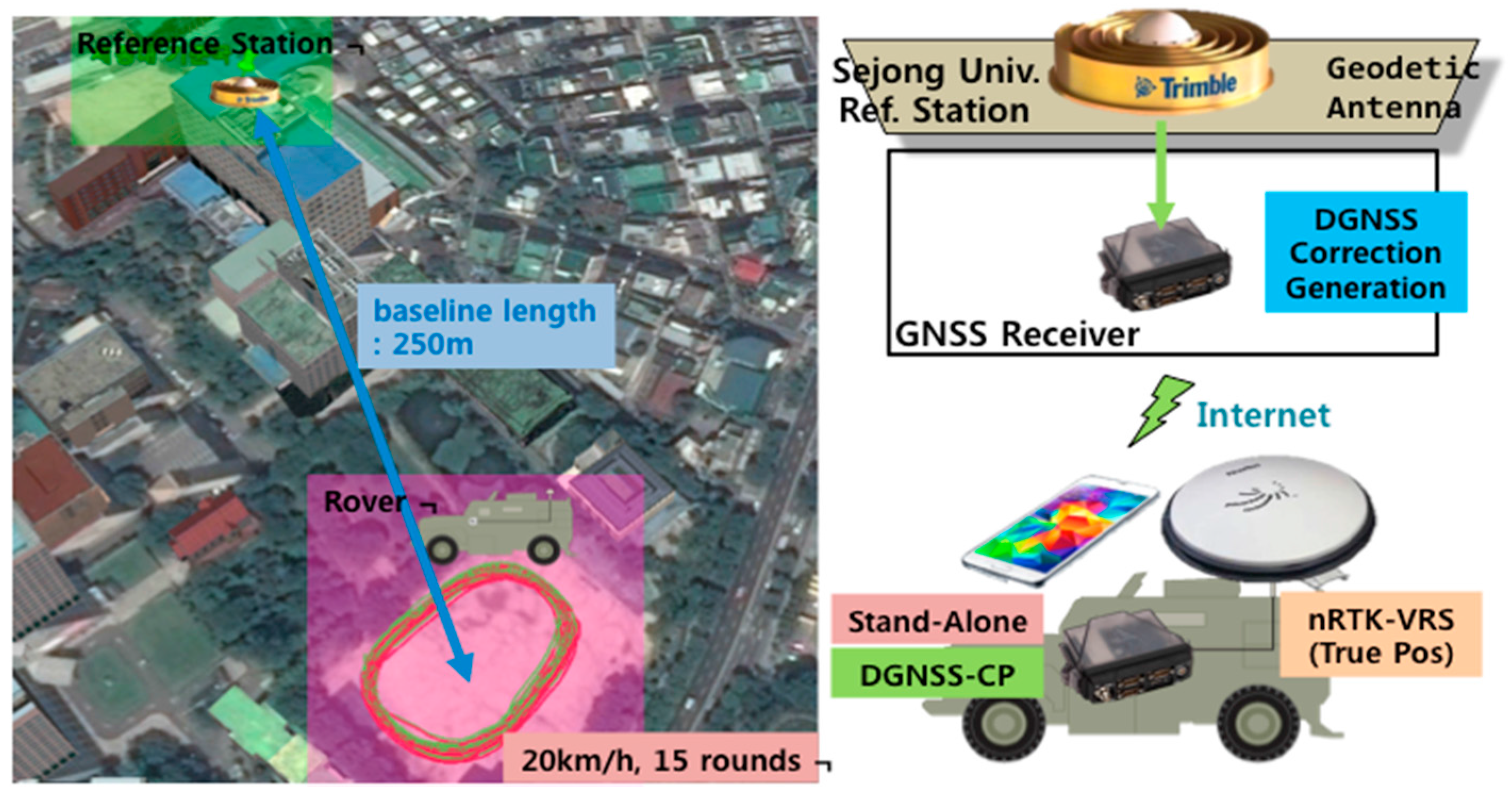
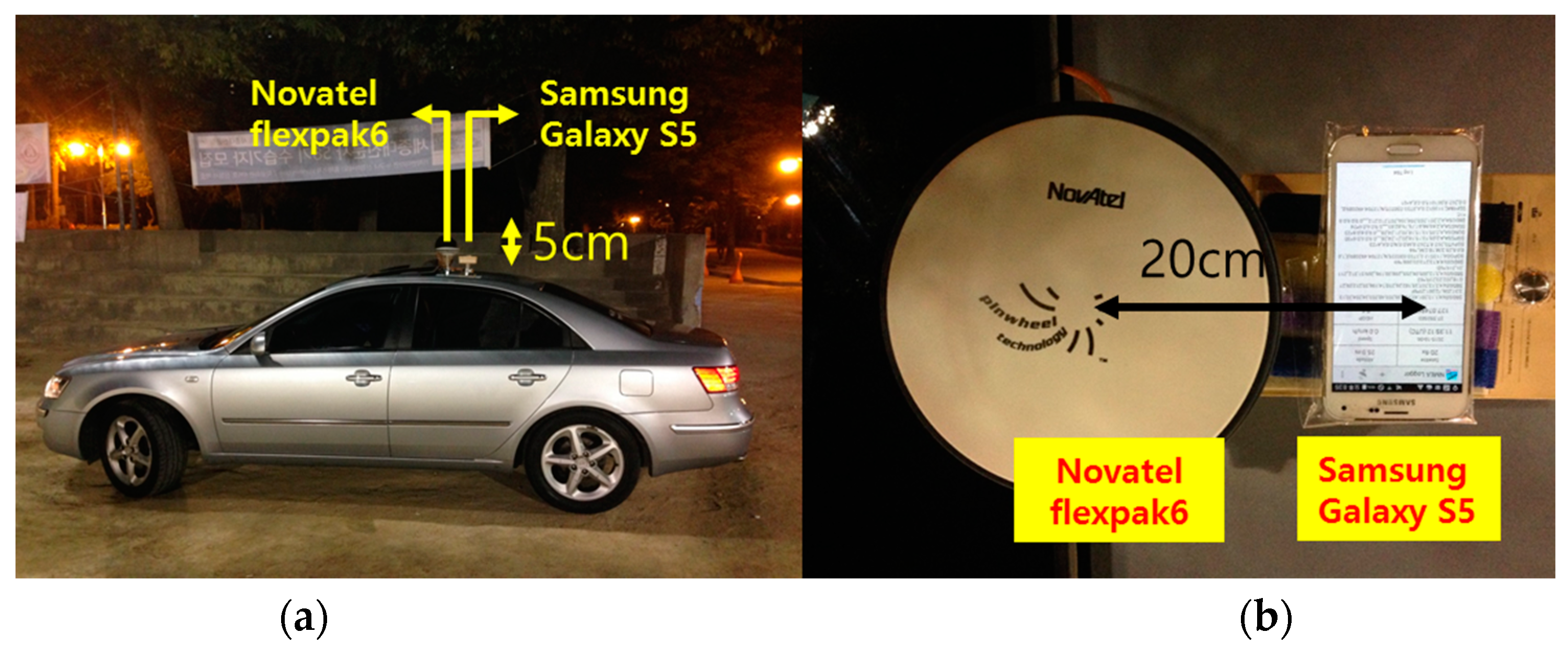
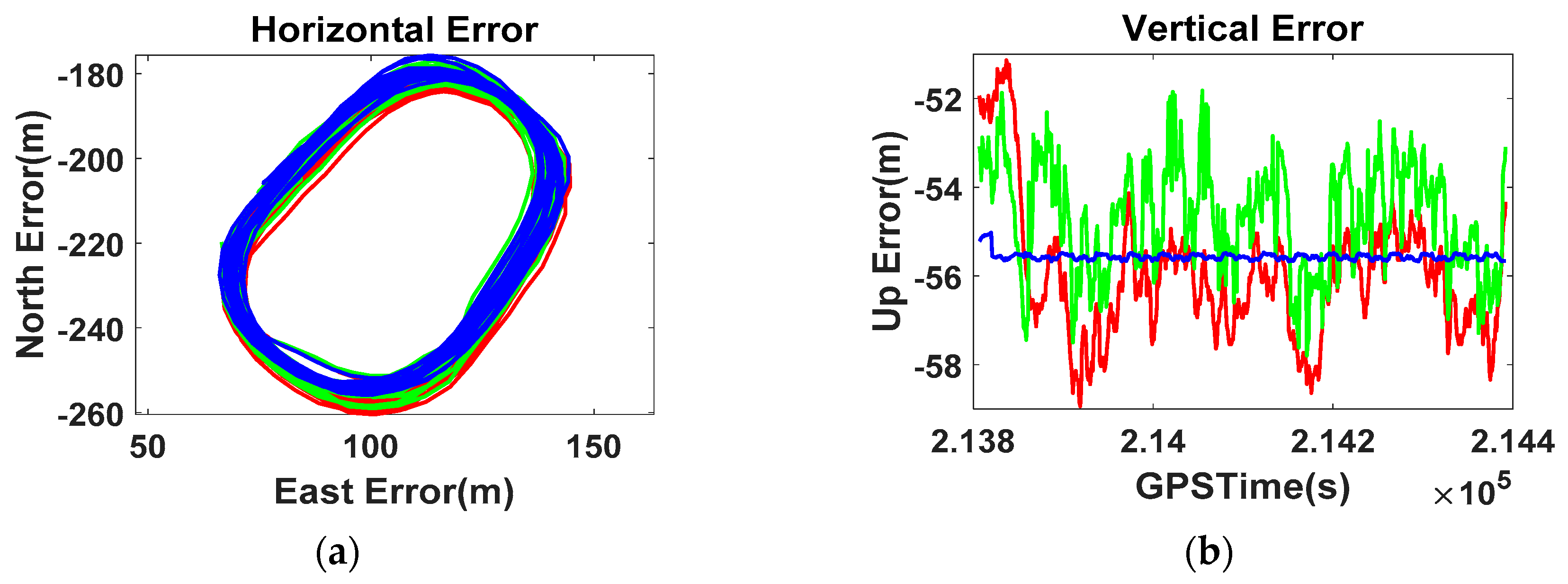
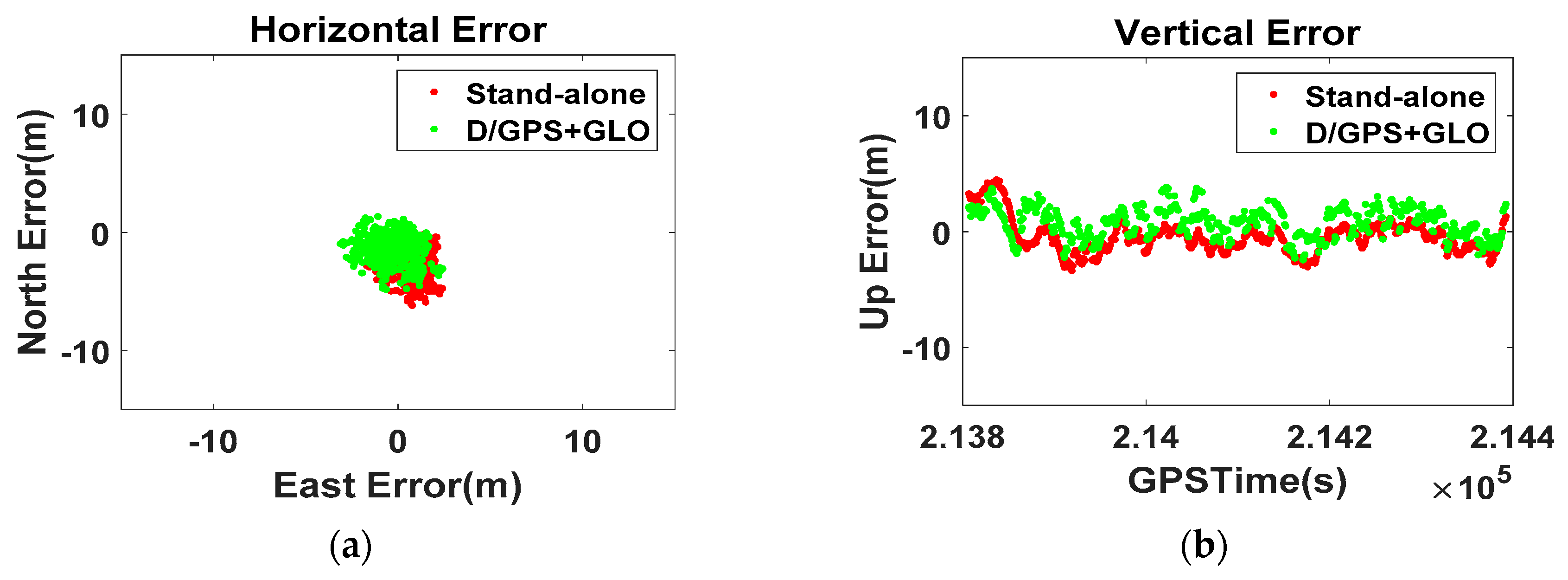
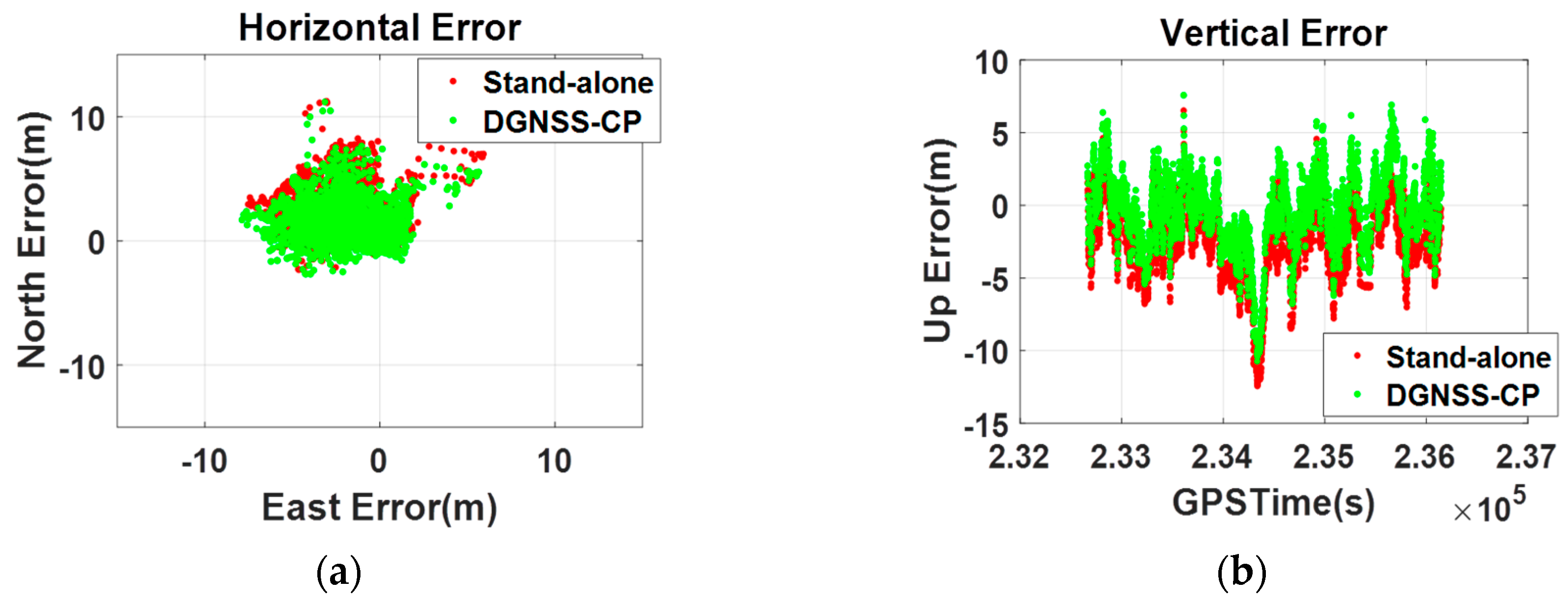
4.3. Dynamic Test
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pew Research Center. U.S. Smartphone Use in 2015. Pew Research Center, 1 April 2015. Available online: http://www.pewinternet.org/2015/04/01/us-smartphone-use-in-2015/ (accessed on 17 June 2016).
- Gigmag: Improved GPS Could Untether VR and Revolutionize Geolocation. May 2015. Available online: http://www.gizmag.com/super-accurate-gps/37422/ (accessed on 17 May 2016).
- Department of Defense. 2014 Federal Radionavigation Plan; Department of Defense: Virginia Beach, VA, USA, 2010. [Google Scholar]
- Ogundipe, O. The Smartphone as a Surveying Tool, FIG Working Week 2013 Environment for Sustainability. Available online: http://www.fig.net/resources/proceedings/fig_proceedings/fig2013/papers/ts03c/TS03C_oluropo_6626.pdf (accessed on 17 May 2016).
- Qualcomm: GPS and GLONASS: “Dual-Core” Location for Your Phone. December 2011. Available online: https://www.qualcomm.com/news/onq/2011/12/15/gps-and-glonass-dual-core-location-your-phone (accessed on 17 May 2016).
- GPSWorld. Qualcomm Collaborates with Samsung to be First to Employ BeiDou for Location-Based Mobile Data. November 2013. Available online: http://gpsworld.com/qualcomm-collaborates-with-samsung-to-be-first-to-employ-beidou-for-location-based-mobile-data/ (accessed on 17 May 2016).
- Seok, H.; Park, B. Annual Prediction of Multi-GNSS Navigation Performance in Urban Canyon. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2016, 34, 71–78. [Google Scholar] [CrossRef]
- Seo, K.; Park, S.; Jang, W. Design of GPS/GLONASS Augmentation System for Software RSIM. J. Ships Ocean Eng. 2011, 51, 9–16. [Google Scholar]
- Hughes, W.J. Technical Center: Global Positioning System (GPS) Standard Positioning Service (SPS), Performance Analysis Report; Report #86; NSTB/WAAS T&E Team: Egg Harbor Twp, NJ, USA, 2011. [Google Scholar]
- GPS World. Accuracy in the Palm of Your Hand. February 2015. Available online: http://gpsworld.com/accuracy-in-the-palm-of-your-hand/ (accessed on 17 May 2016).
- Hwang, J.; Yun, H.; Suh, Y.; Cho, J.; Lee, D. Development of an RTK-GPS positioning application with an improved position error model for smartphones. Sensors 2012, 12, 12988–13001. [Google Scholar] [CrossRef] [PubMed]
- Lawrence, L.B. Implementation and Evaluation of a Differential GPS Based on Smartphones and Internet Technology. Master’s Thesis, Halmstad University, Halmstad, Sweden, 2013. [Google Scholar]
- Misra, P.; Enge, P. Global Positioning System—Signals, Measurements, and Performance; Ganga-Jamura Press: Alexandria, VA, USA, 2001. [Google Scholar]
- National Maritime PNT Office. Smartphone-Based Service. Available online: http://www.nmpnt.go.kr/html/en/dgnss/dgnss_0304.html (accessed on 17 May 2016).
- Location-Based Solutions in the Android Realm. Droidcon, Berlin, 2014. Available online: http://2014.de.droidcon.com/2014/session/location-based-solutions-android-realm (accessed on 17 May 2016).
- Jung, D. CORSnet-NSW Differential GNSS. Master’s Thesis, University of New South Wales, Sydney, Australia, 2011. [Google Scholar]
- Kaplan, E.D. Understanding GPS: Principles and Application; Artech House Publishers: Boston, MA, USA, 1996. [Google Scholar]
- Lee, S.-H.; Choi, K.-H.; Park, J.-U.; Park, P.H. The Improvement of Position Accuracy using Inverted DGPS. J. Astron. Space Sci. 2001, 18, 63–70. [Google Scholar]
- Park, B.; Lee, J.; Kim, Y.; Yun, H.; Kee, C. DGPS enhancement to GPS NMEA output data: DGPS by correction projection to position-domain. J. Navig. 2013, 66, 249–264. [Google Scholar] [CrossRef]
- Qualcomm. Snapdragon801. Available online: https://www.qualcomm.com/products/snapdragon/processors/801 (accessed on 17 May 2016).
- Qualcomm. Snapdragon808. Available online: https://www.Qualcomm.Com/Products/Snapdragon/Processors/808 (accessed on 17 May 2016).
- Wang, J.; Knight, N.L.; Lu, X. Impact of the GNSS Time Offsets on Positioning Reliability. J. Glob. Position. Syst. 2011, 10, 165–172. [Google Scholar]
- Moudrak, A.; Konovaltsev, A.; Furthner, J.; Hornbostel, A.; Hammesfahr, J. GPS galileo time offset: How it affects positioning accuracy and how to cope with it. In Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004.
- Angrisano, A.; Gaglione, S.; Gioia, C.; Massaro, M.; Troisi, S. Benefit of the NeQuick Galileo version in GNSS single-point positioning. Int. J. Navig. Obs. 2013, 2013, 302947. [Google Scholar] [CrossRef]
- Gaglione, S.; Angrisano, A.; Freda, P.; Lnnac, A.; Vultaggio, M.; Crocetto, N. Benefit of GNSS multiconstellation in position and velocity domain. In Proceedings of the 2015 IEEE Metrology for Aerospace, Benevento, Italy, 4–5 June 2015.
- Saka, M.H. Sub-meter accuracy for stand-alone GPS positioning in hydrographic surveying. J. Navig. 2004, 57, 135–144. [Google Scholar] [CrossRef]
- Feess, W.A.; Stephens, S.G. Evaluation of GPS ionospheric time-delay model. IEEE Trans. Aerosp. Electron. Syst. 1987, AES-23, 332–338. [Google Scholar] [CrossRef]
- Herrera, A.M.; Suhandri, H.F.; Realini, E.; Reguzzoni, M.; de Lacy, M.C. goGPS: Open-source MATLAB software. In GPS Solutions; Springer: Berlin, Germany, 2015. [Google Scholar]
- Parkinson, B. Progress in Astronautics and Aeronautics. In Global Positioning System: Theory and Applications; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996. [Google Scholar]
- Novotel. OEM6 Family Installation and Operation User Manual Rev 11; Novotel: Calgary, AB, Canada, 2016. [Google Scholar]
- Klobuchar, J. Ionospheric Time-Delay Algorithms for Single-Frequency GPS Users. IEEE Trans. Aerosp. Electron. Syst. 1987, AES-23, 325–331. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GPS(L1)-only | GLONASS-only | Multi-GNSS | ||||
|---|---|---|---|---|---|---|
| SPP | Differential GPS | SPP | Differential GPS | SPP | Differential GNSS | |
| RMS (m) | 2.84 | 0.42 | 2.98 | 0.64 | 2.37 | 0.41 |
| Mean (m) | 2.39 | 0.36 | 2.58 | 0.44 | 1.99 | 0.30 |
| Ionospheric Parameters | α0 | α1 | α2 | α3 |
| β0 | β1 | β2 | β3 | |
| Tropospheric Parameters | Pressure (mb) | Temperature (°K) | Humidity | |
| 1013.25 | 291.25 | 50% |
| Statistical Results | Max | Mean | STD | RMS | 95% | ||
|---|---|---|---|---|---|---|---|
| Galaxy S5 | Stand-alone | Horizontal | 1.84 | 1.19 | 0.65 | 1.35 | 1.83 |
| Vertical | 4.83 | −4.36 | 0.42 | 4.36 | 4.83 | ||
| DGNSS-CP | Horizontal | 2.04 | 0.41 | 0.69 | 0.80 | 1.85 | |
| Vertical | 3.76 | −0.42 | 1.45 | 1.27 | 2.70 | ||
| LG V10 | Stand-alone | Horizontal | 3.69 | 2.83 | 0.88 | 2.96 | 3.78 |
| Vertical | 3.45 | 2.30 | 0.60 | 2.28 | 3.17 | ||
| DGNSS-CP | Horizontal | 2.13 | 0.73 | 0.93 | 1.19 | 2.08 | |
| Vertical | 3.3 | 0.20 | 1.38 | 1.25 | 2.44 | ||
| Statistical Results | Max | Mean | STD | RMS | 95% | ||
|---|---|---|---|---|---|---|---|
| Galaxy S5 | Stand-alone | Horizontal | 6.24 | 2.76 | 1.41 | 3.10 | 5.26 |
| Vertical | 4.48 | −0.44 | 1.48 | 1.17 | 3.08 | ||
| DGNSS-CP | Horizontal | 4.87 | 1.34 | 1.53 | 2.04 | 4.02 | |
| Vertical | 3.85 | 0.79 | 1.28 | 1.25 | 2.72 | ||
| LG V10 | Stand-alone | Horizontal | 11.66 | 1.56 | 1.78 | 2.36 | 4.15 |
| Vertical | 12.43 | −1.83 | 2.44 | 2.53 | 6.38 | ||
| DGNSS-CP | Horizontal | 10.61 | 0.96 | 1.83 | 1.98 | 3.96 | |
| Vertical | 10.7 | −0.22 | 2.42 | 1.94 | 5.71 | ||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoon, D.; Kee, C.; Seo, J.; Park, B. Position Accuracy Improvement by Implementing the DGNSS-CP Algorithm in Smartphones. Sensors 2016, 16, 910. https://doi.org/10.3390/s16060910
Yoon D, Kee C, Seo J, Park B. Position Accuracy Improvement by Implementing the DGNSS-CP Algorithm in Smartphones. Sensors. 2016; 16(6):910. https://doi.org/10.3390/s16060910
Chicago/Turabian StyleYoon, Donghwan, Changdon Kee, Jiwon Seo, and Byungwoon Park. 2016. "Position Accuracy Improvement by Implementing the DGNSS-CP Algorithm in Smartphones" Sensors 16, no. 6: 910. https://doi.org/10.3390/s16060910
APA StyleYoon, D., Kee, C., Seo, J., & Park, B. (2016). Position Accuracy Improvement by Implementing the DGNSS-CP Algorithm in Smartphones. Sensors, 16(6), 910. https://doi.org/10.3390/s16060910