
Mitigating BeiDou Satellite-Induced Code Bias: Taking into Account the Stochastic Model of Corrections

Abstract
:1. Introduction
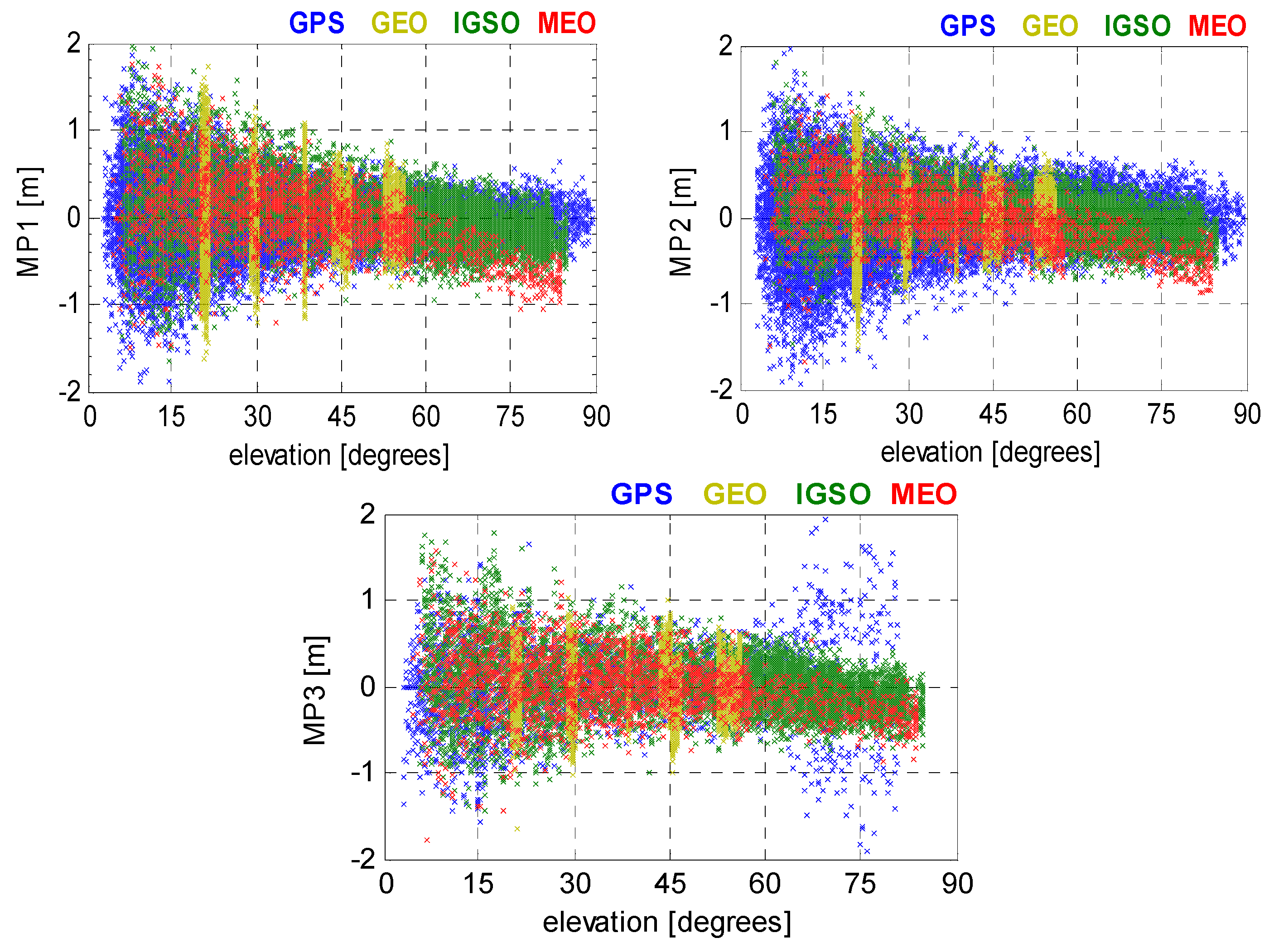
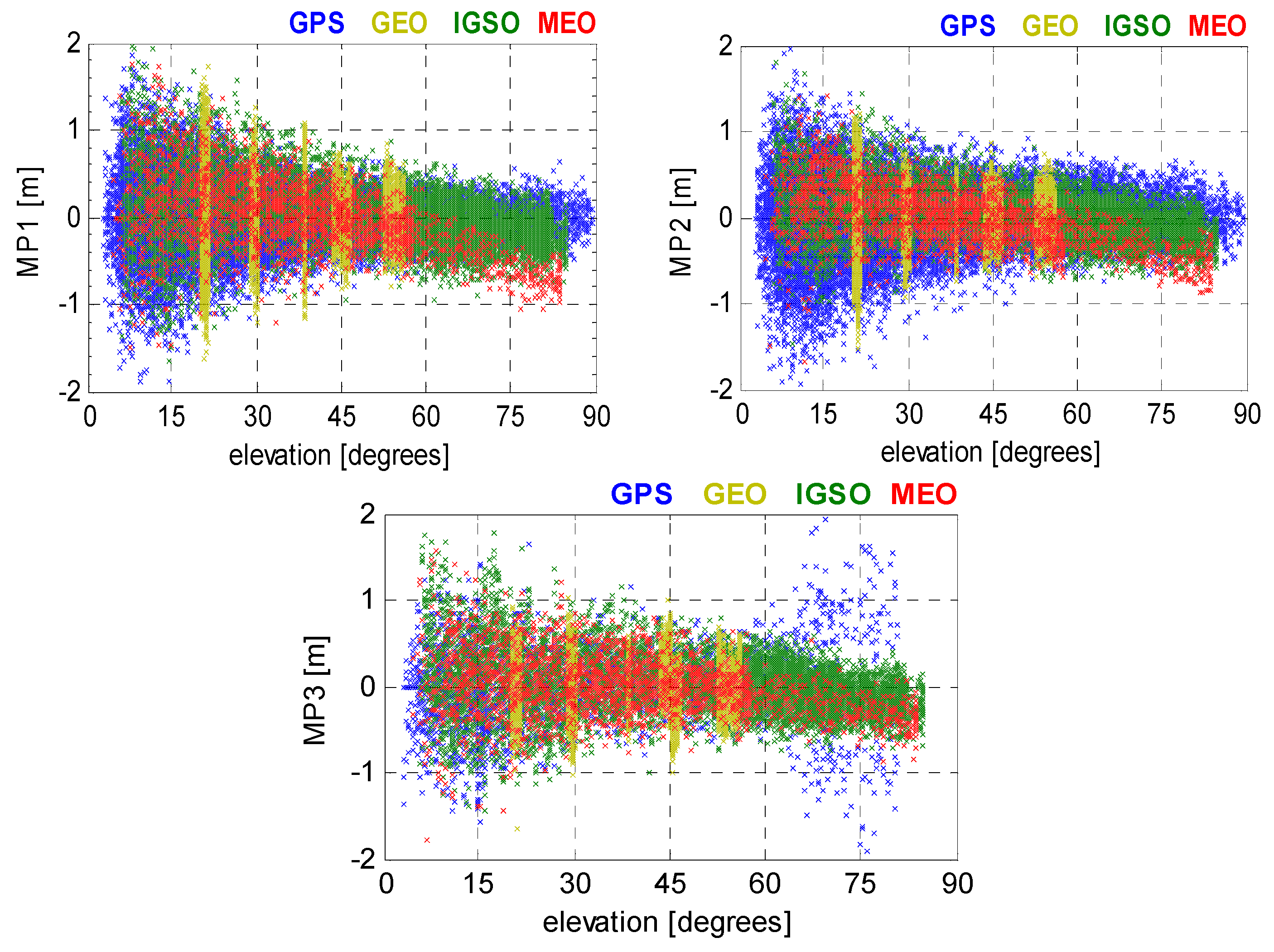
2. Code Bias Variation Analysis
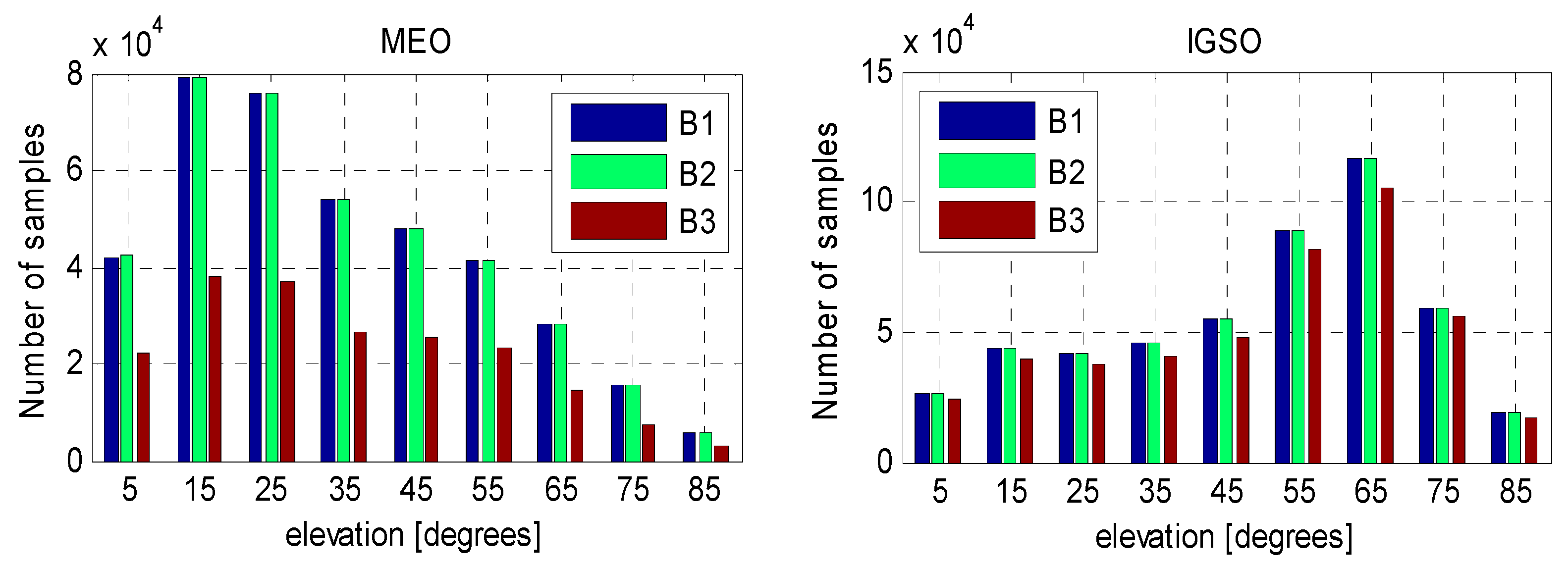
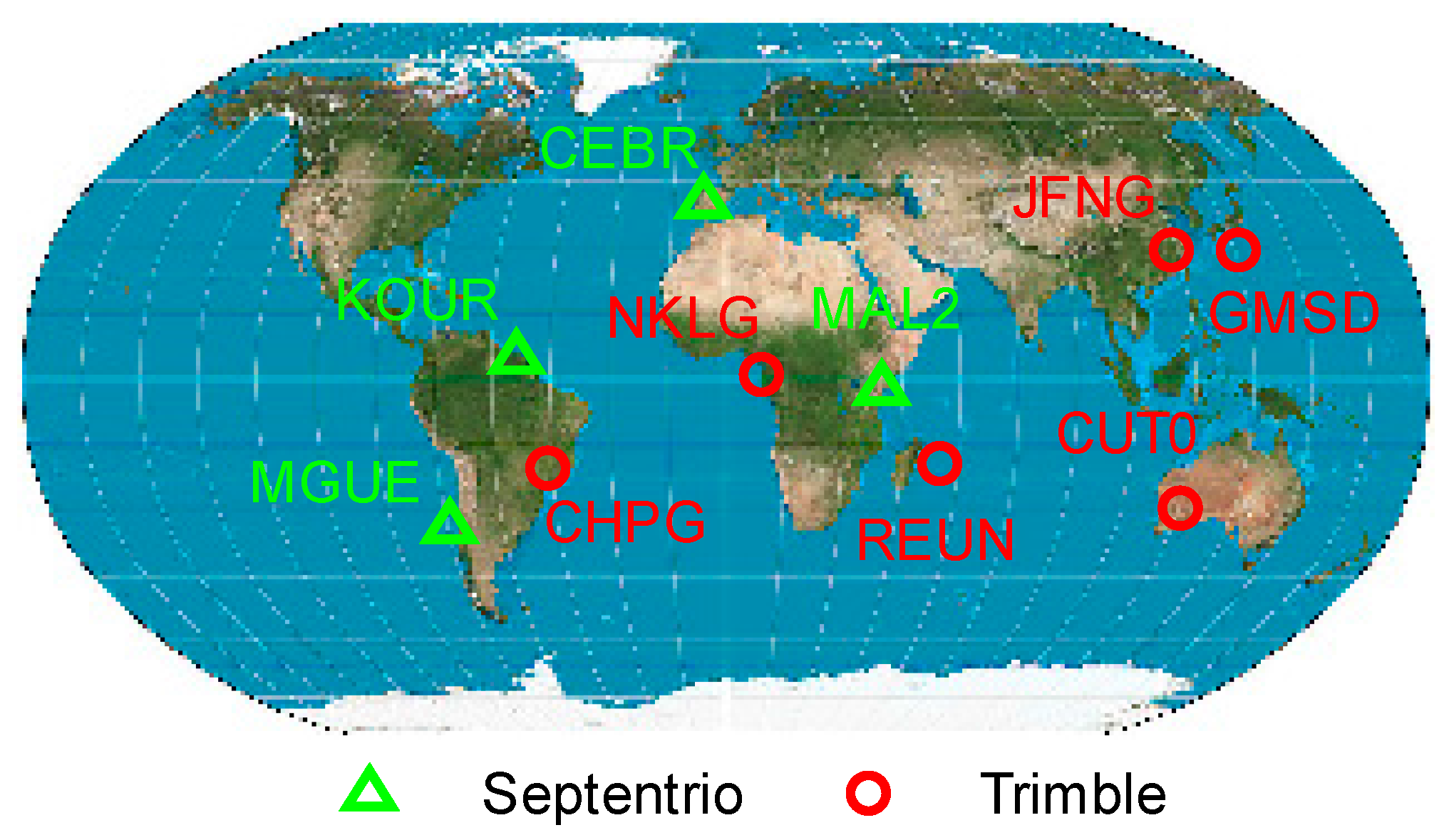
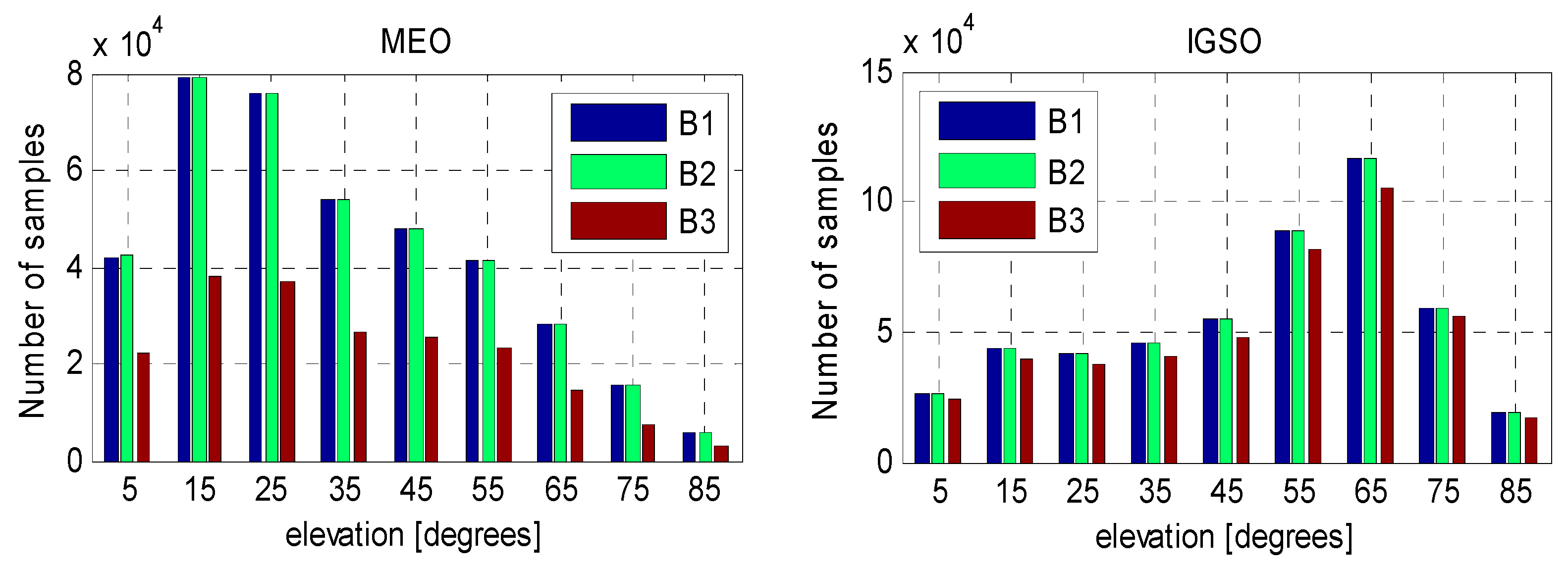
3. Observation Datasets
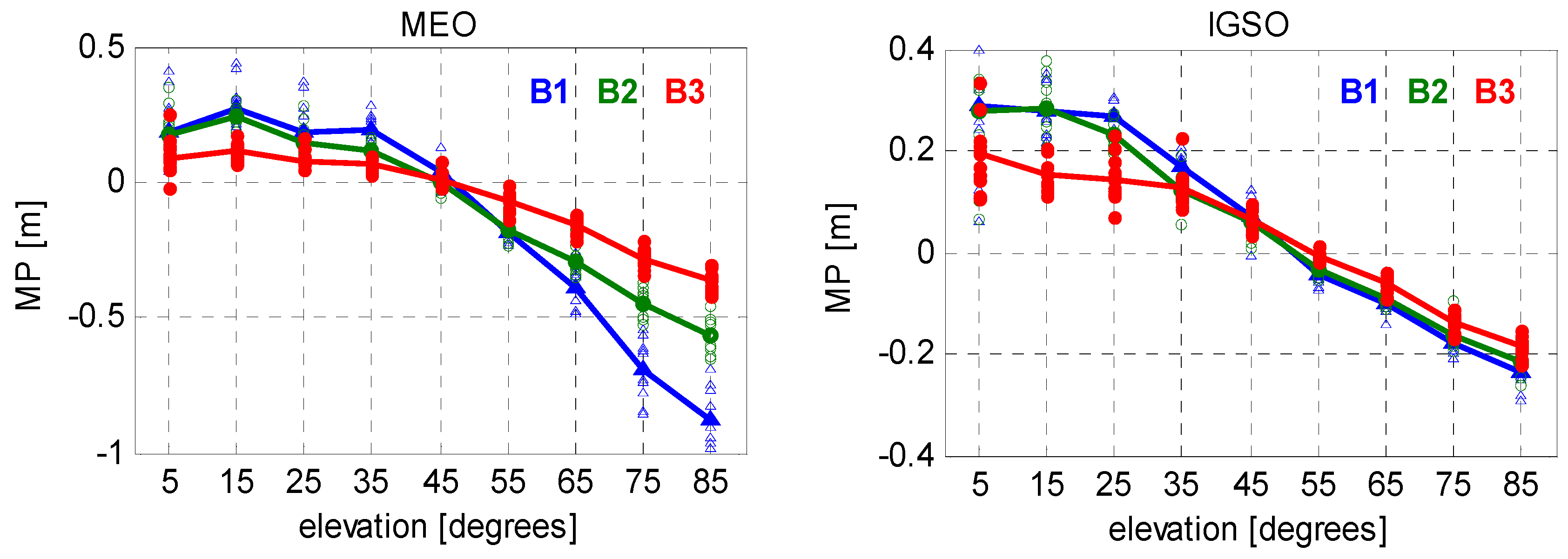
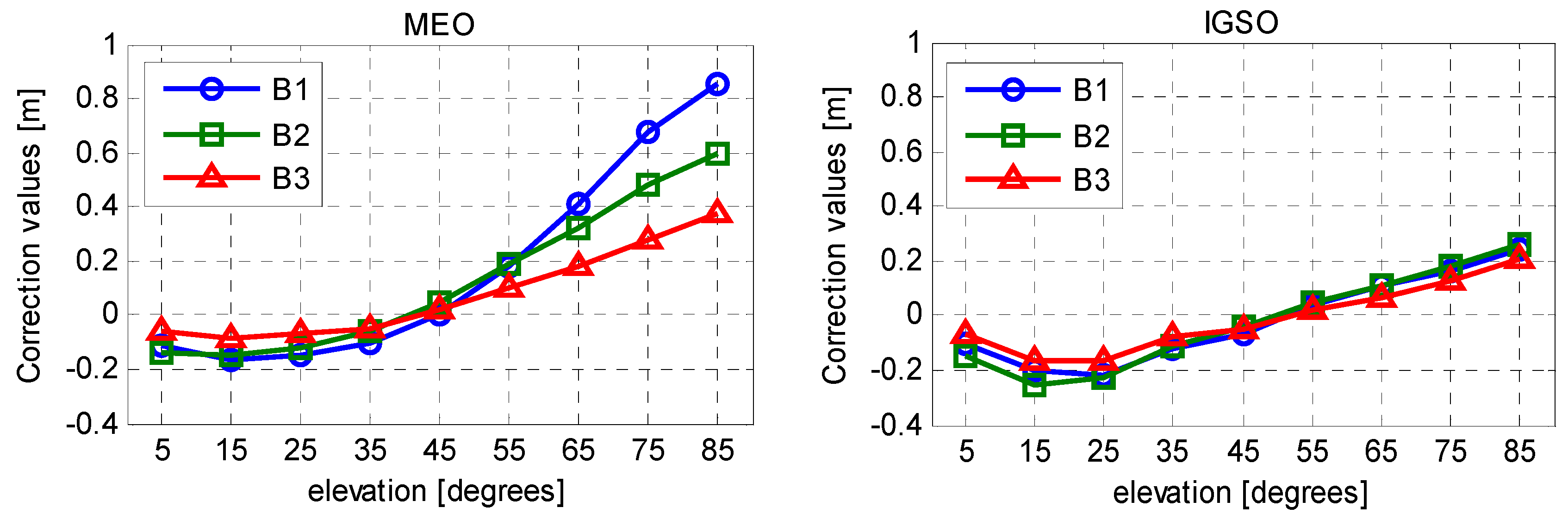
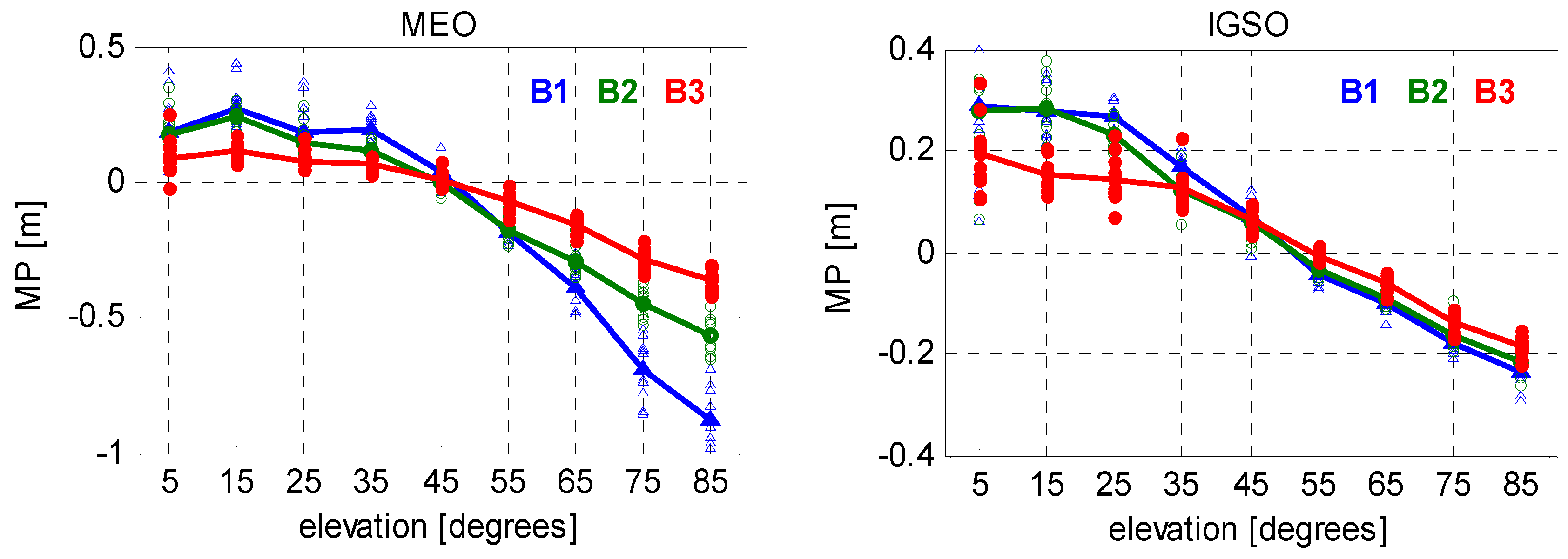
4. Improved Correction Model
- : point index; : number of points (samples);
- : segment index; : number of nodes;
- : elevation angle on a specific node (i.e., the end point of j-th segment);
- : MP value on a specific node;
- : fitted function used in the j-th segment.
5. Validation of the Models
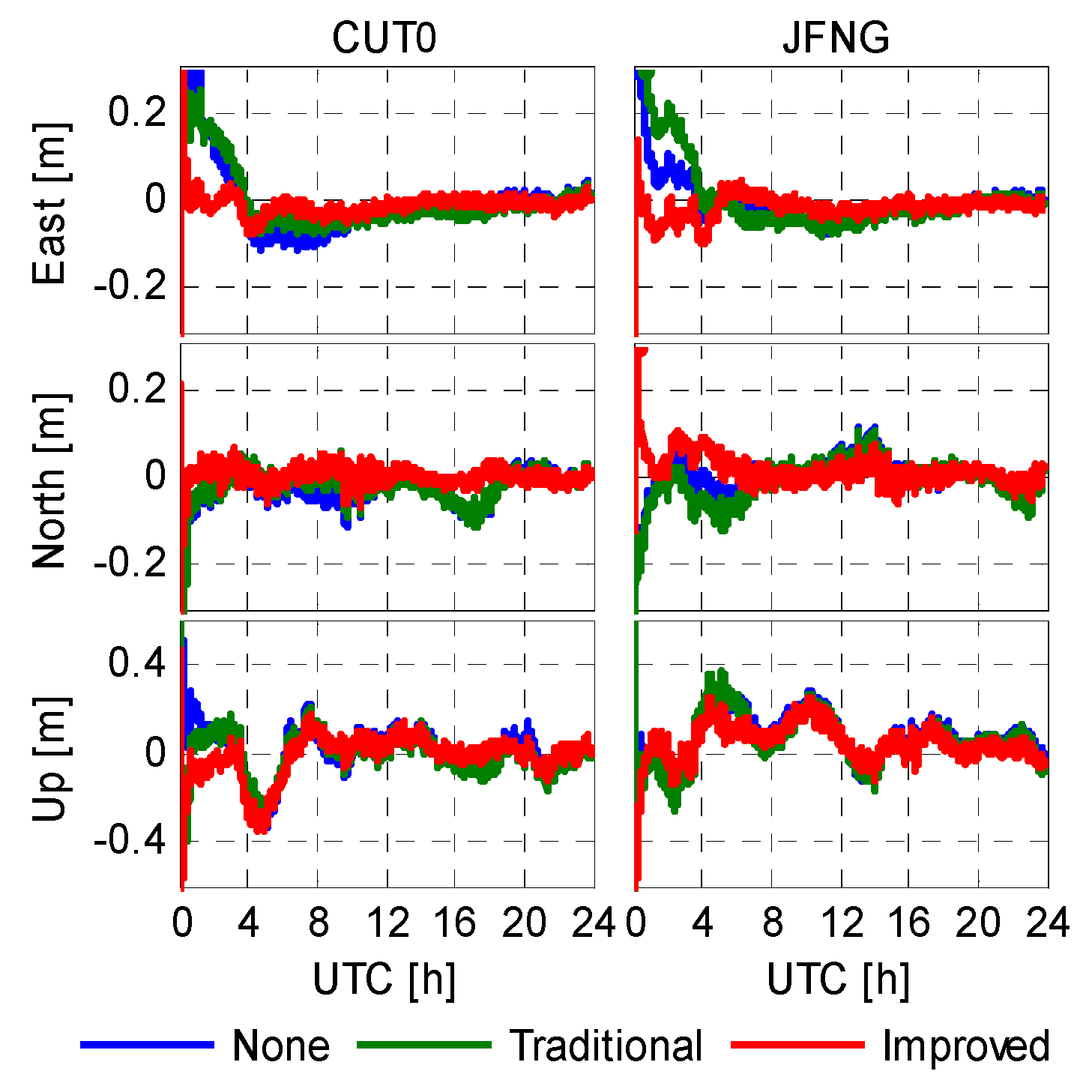
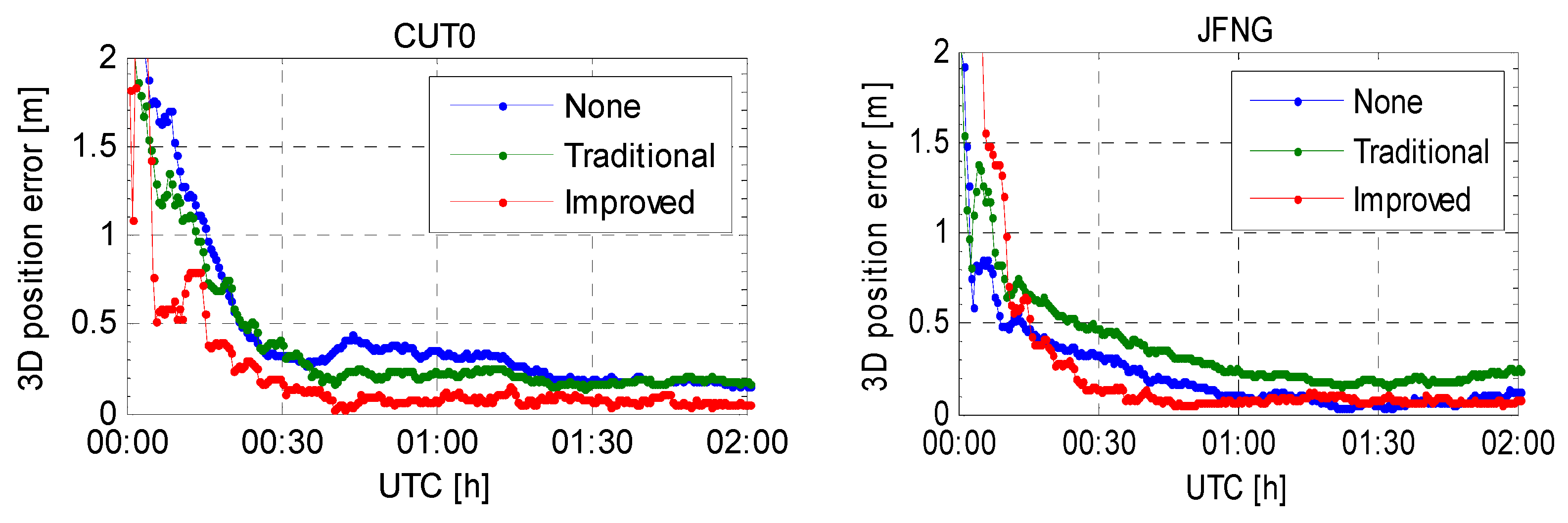
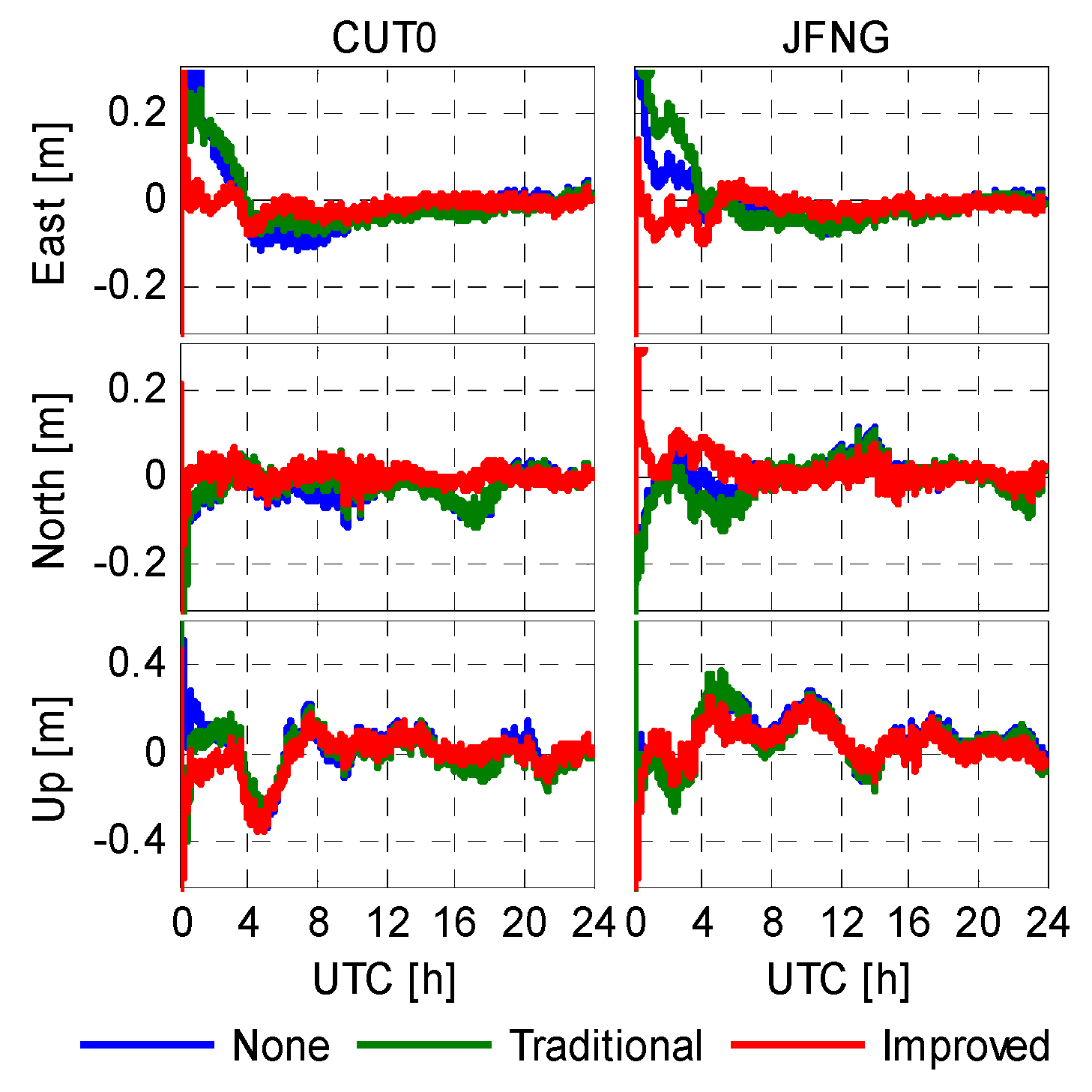
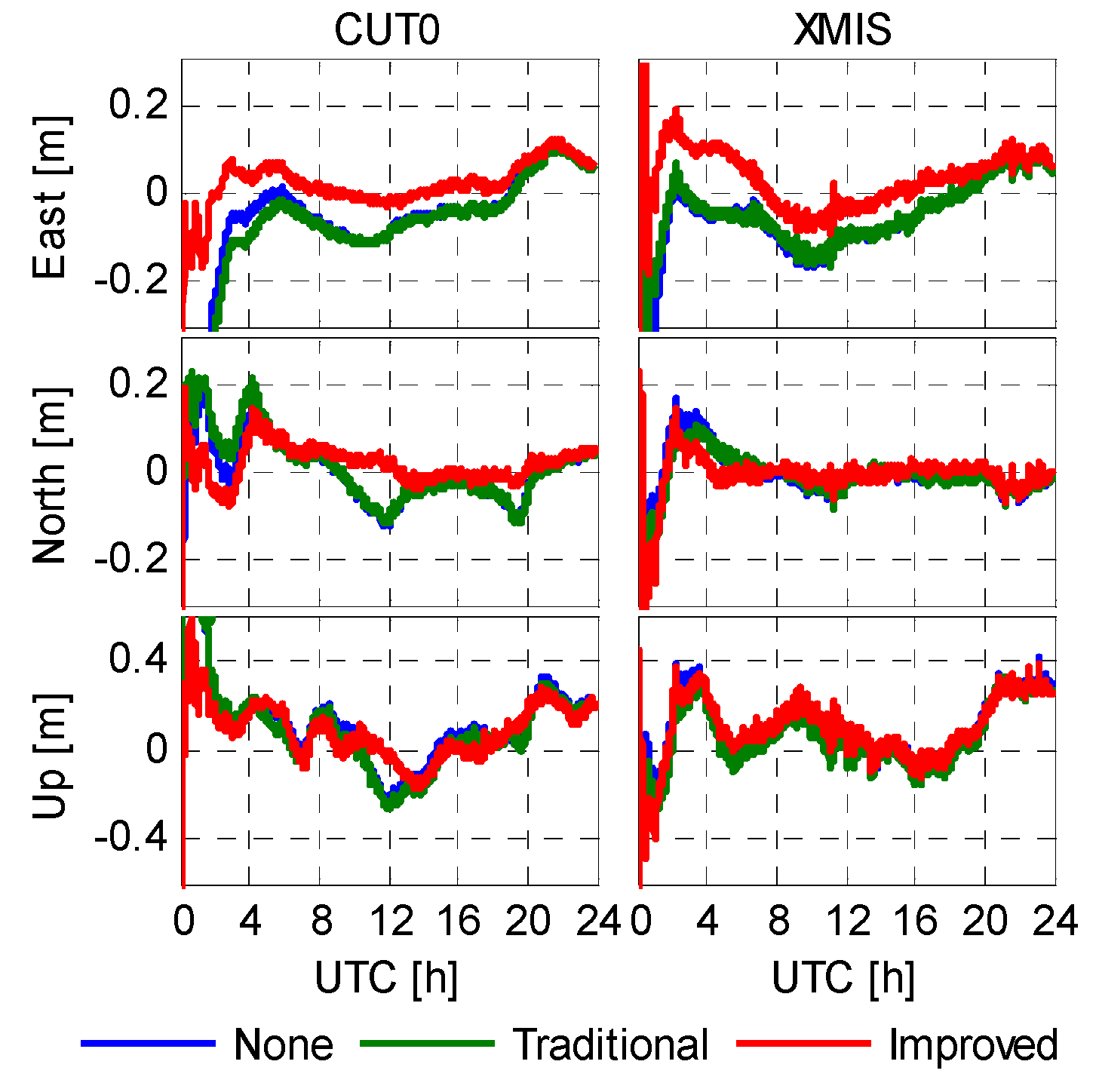
5.1. Positioning Error
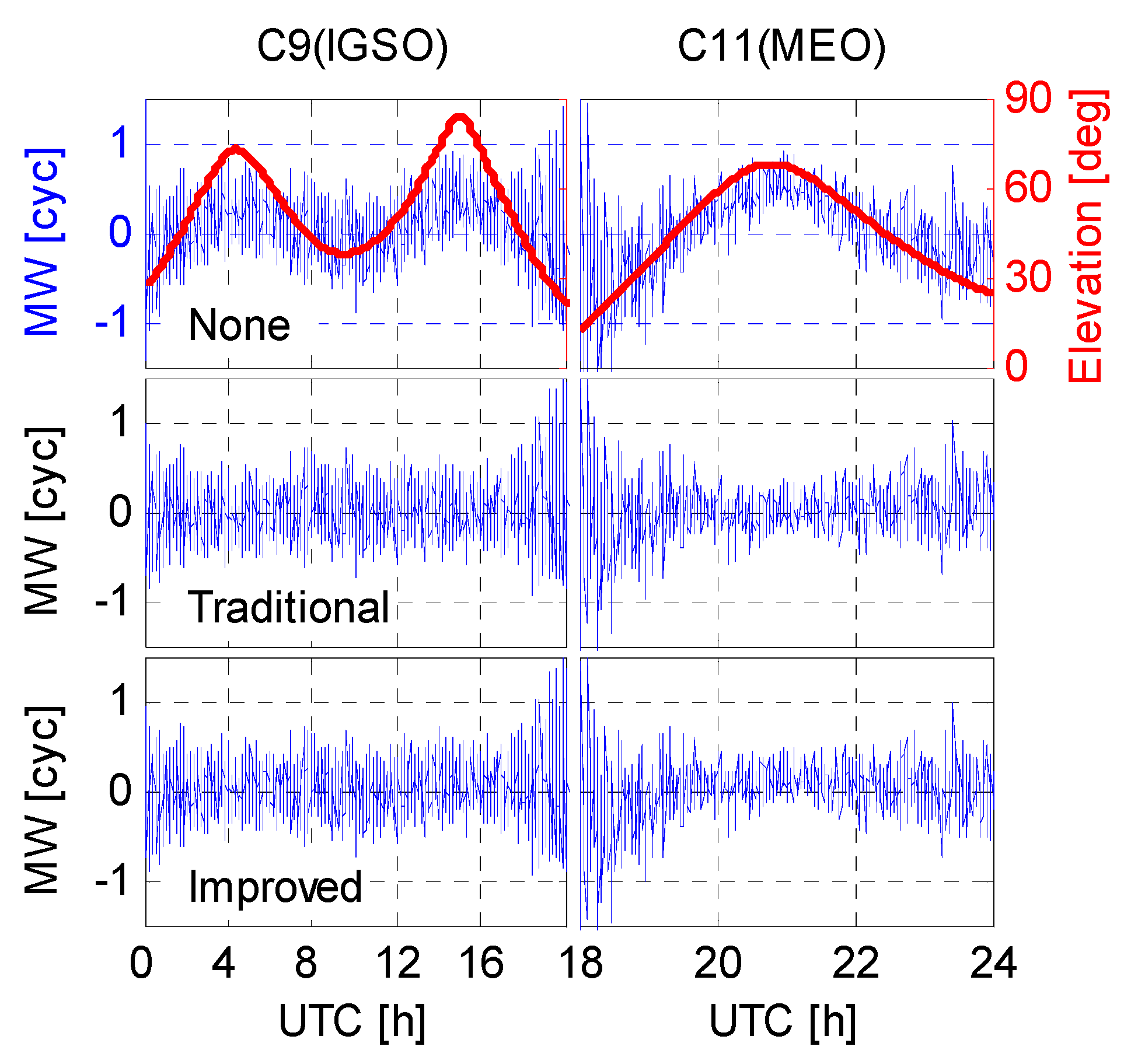
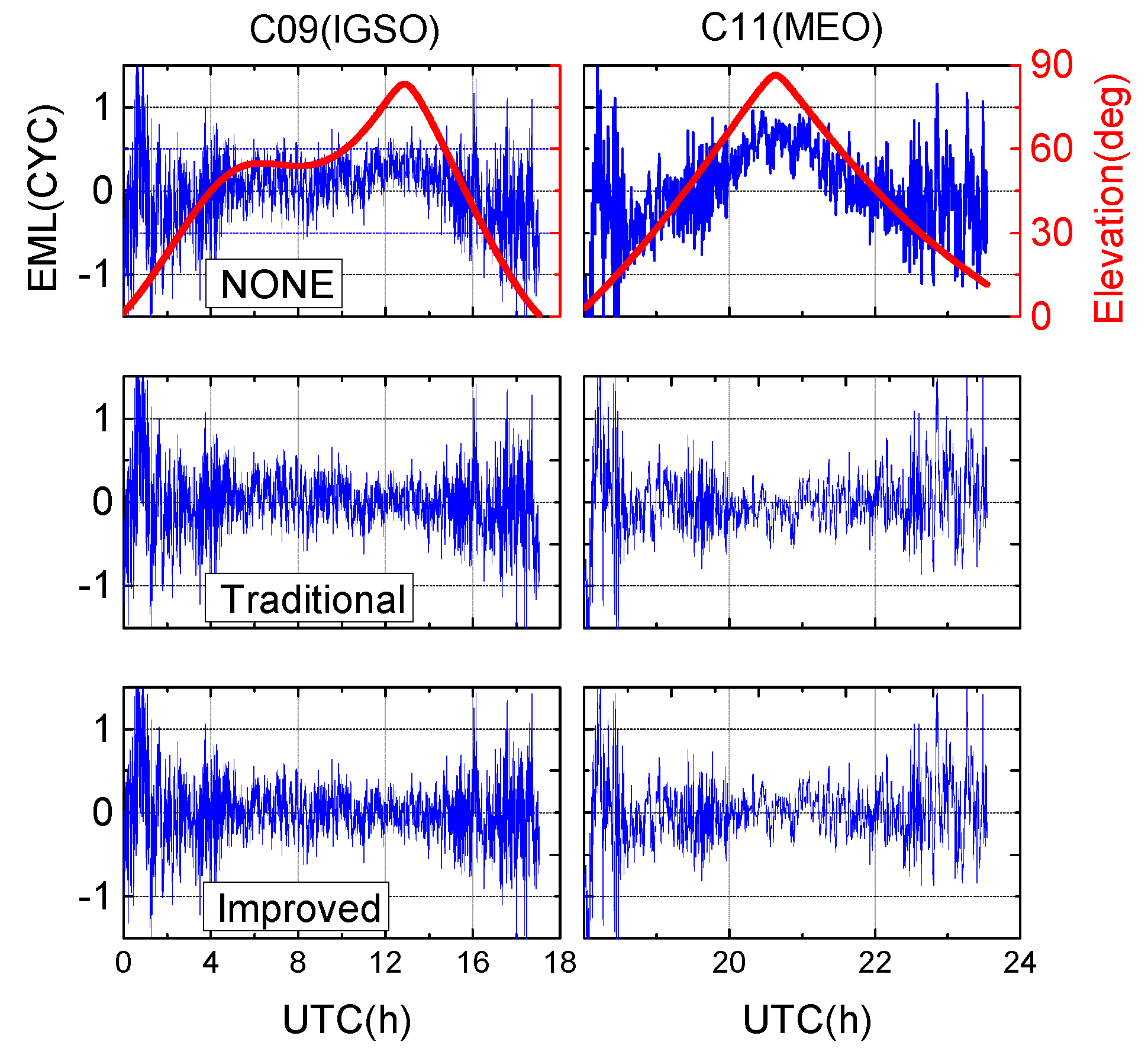
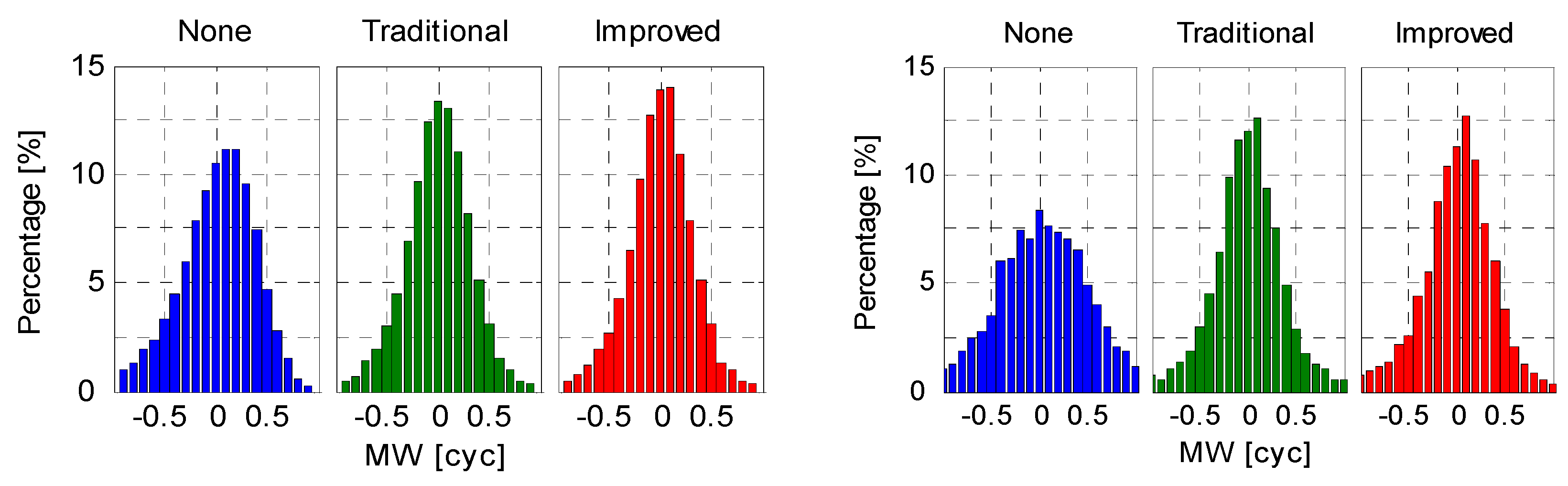
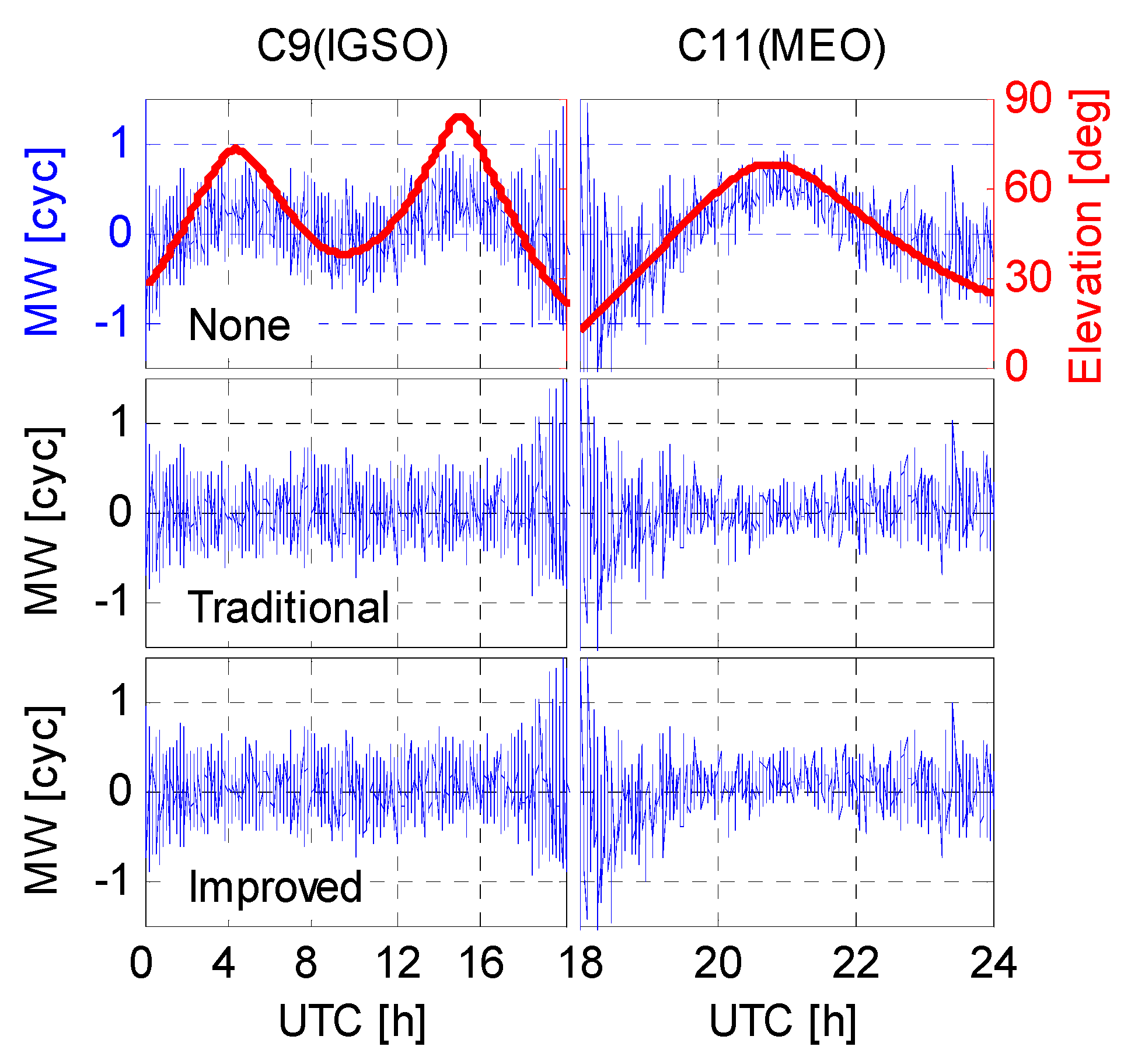
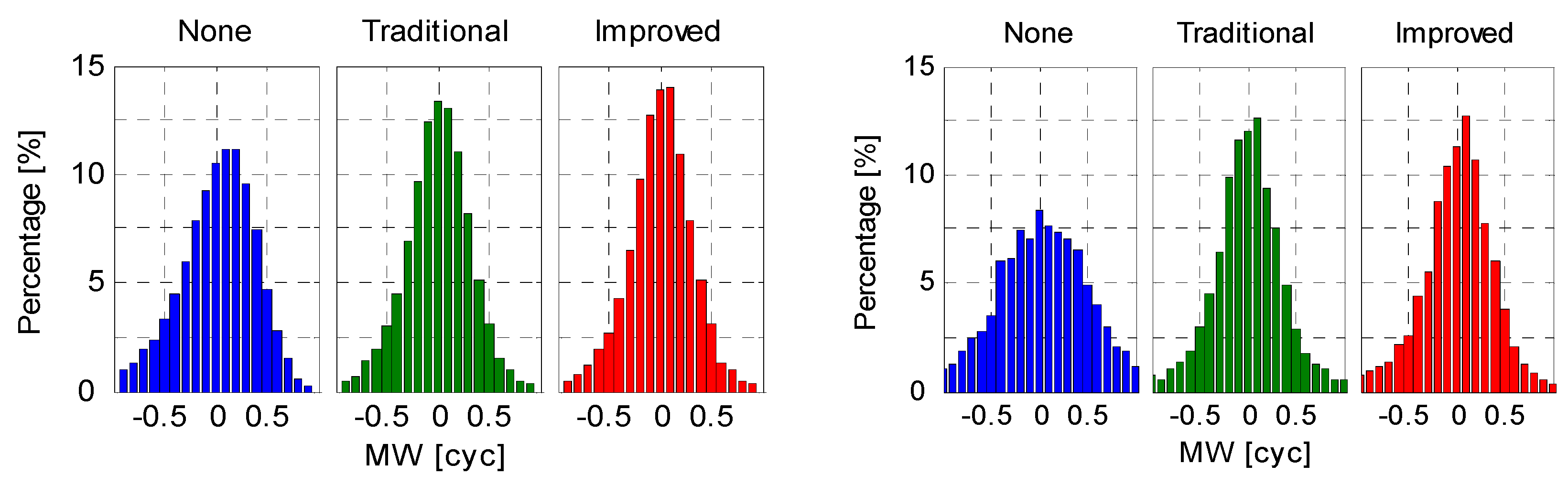
5.2. Wide-Lane Ambiguity
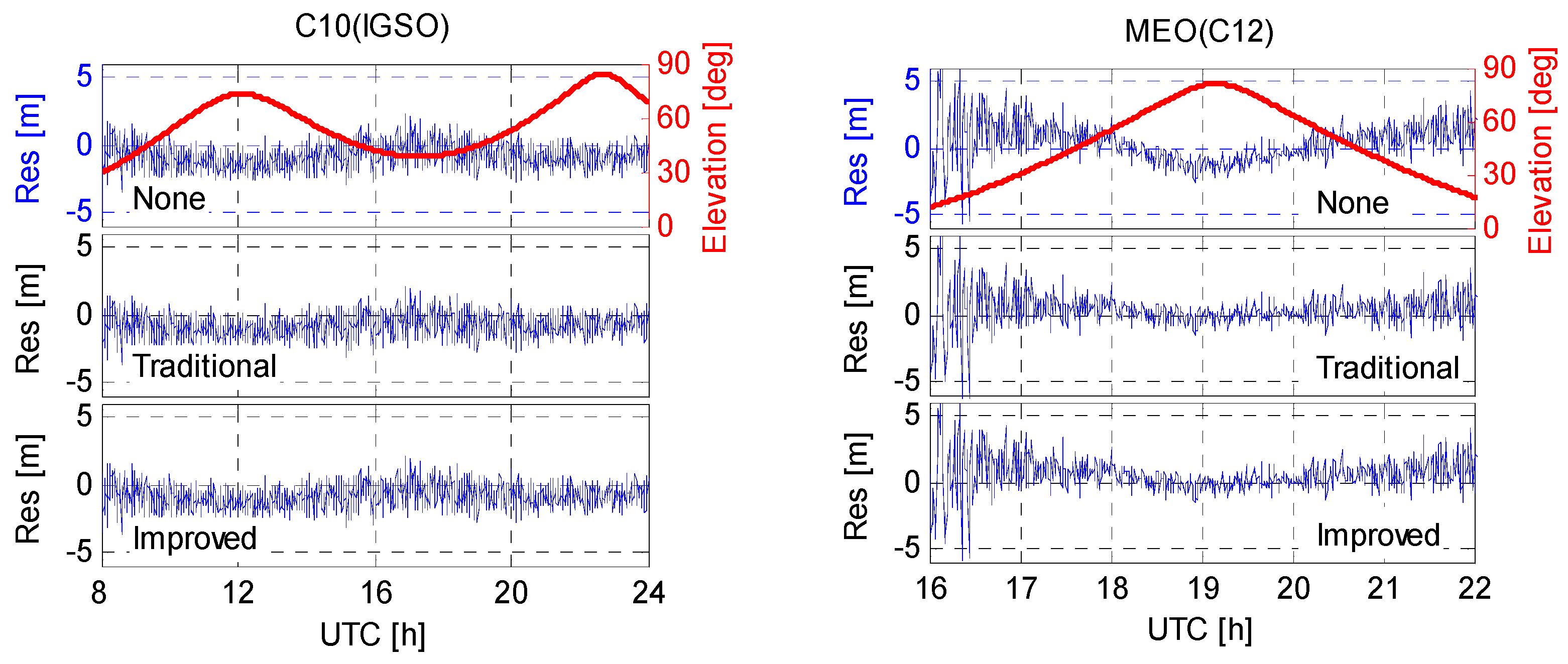
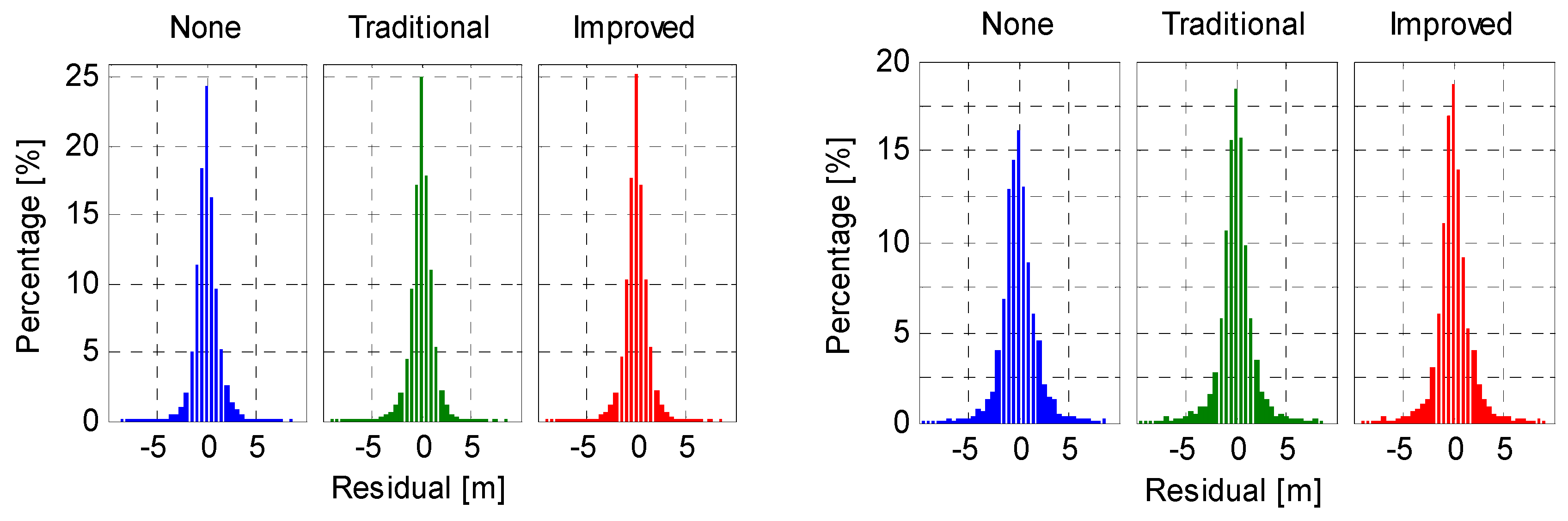
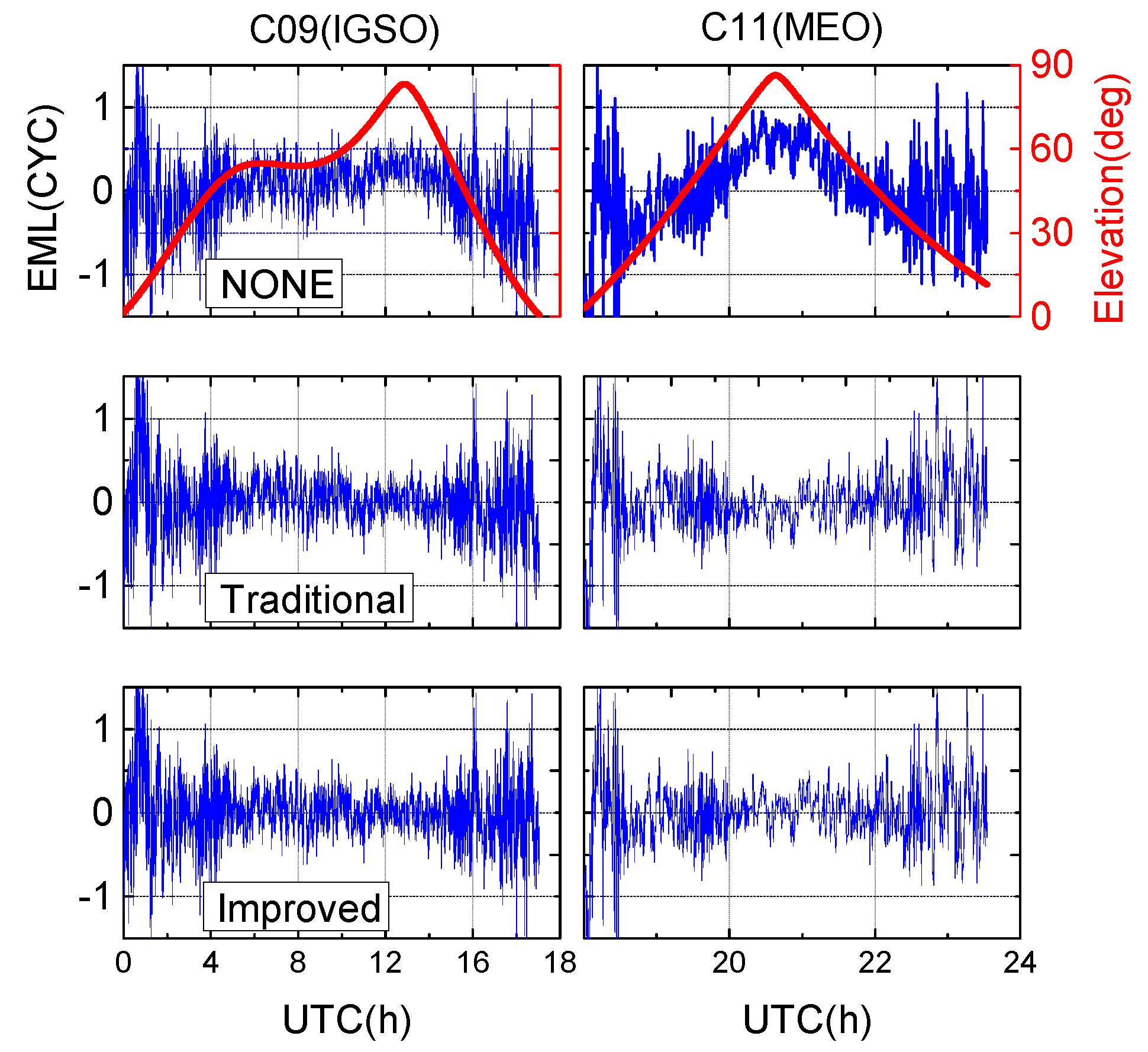
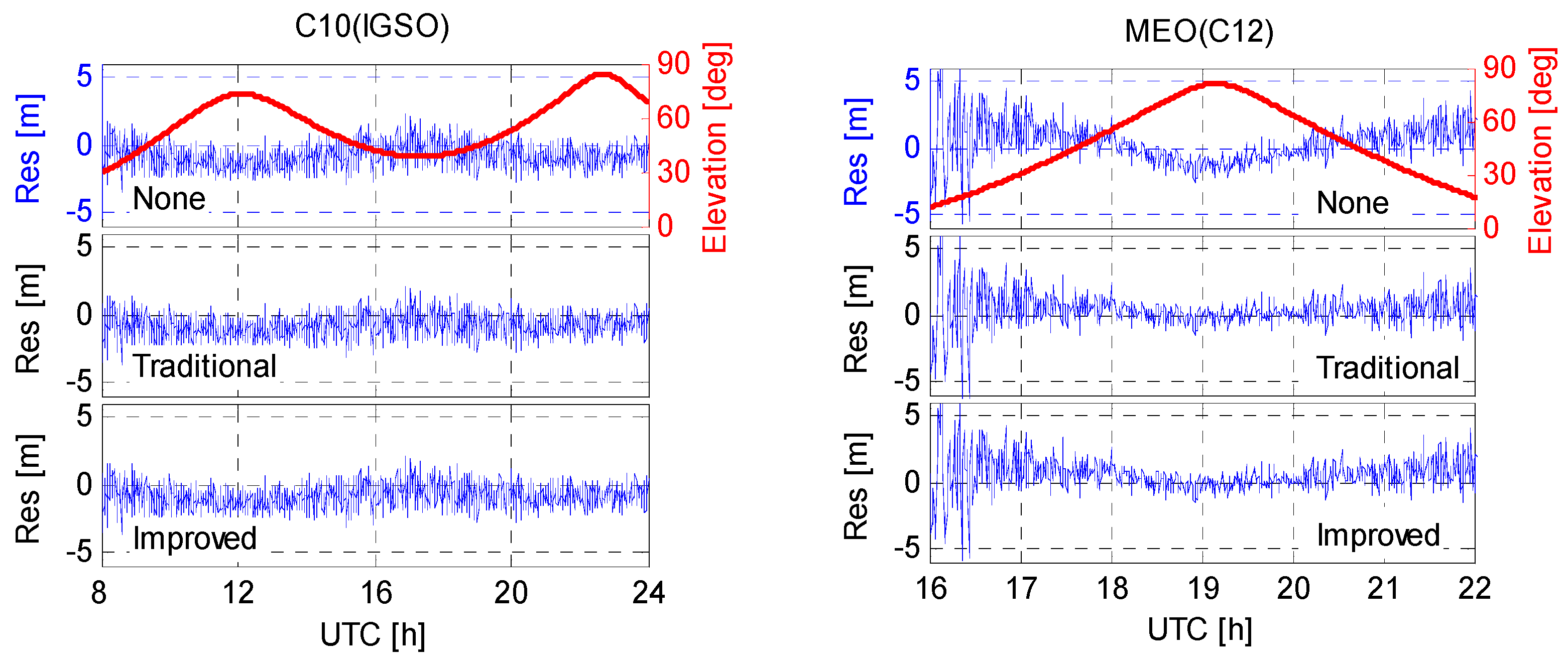
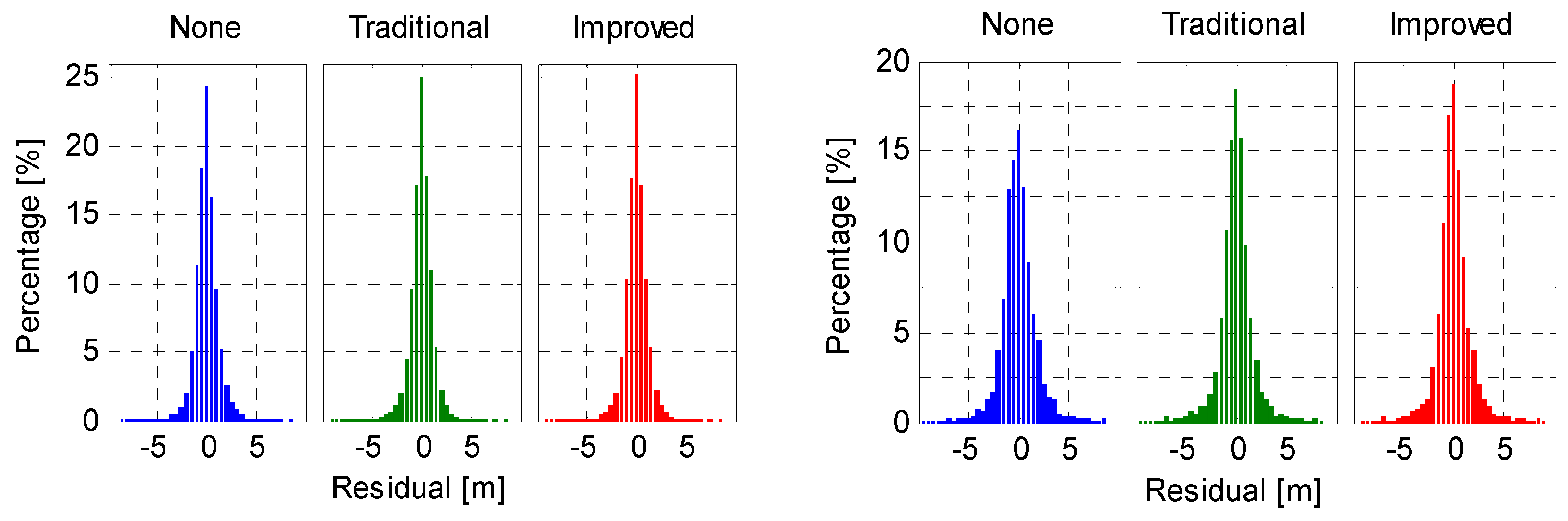
5.3. Code Residual
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial Assessment of the COMPASS/BeiDou-2 Regional Navigation Satellite System. GPS Solut. 2013, 17, 211–222. [Google Scholar] [CrossRef]
- Zhao, Q.; Guo, J.; Li, M.; Qu, L.; Hu, Z.; Shi, C.; Liu, J. Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J. Geod. 2013, 87, 475–486. [Google Scholar] [CrossRef]
- Deng, Z.; Zhao, Q.; Springer, T.; Prange, L.; Uhlemann, M. Orbit and Clock Determination-BeiDou. In Proceedings of the International GNSS Service (IGS) Workshop, Pasadena, CA, USA, 23–27 June 2014.
- Wu, X.; Hu, X.; Wang, G.; Zhong, H.; Tang, C. Evaluation of COMPASS ionospheric model in GNSS positioning. Adv. Space Res. 2013, 51, 959–968. [Google Scholar] [CrossRef]
- Zhang, R.; Song, W.; Yao, Y.; Shi, C.; Lou, Y.; Yi, W. Modeling regional ionospheric delay with ground-based BeiDou and GPS observations in China. GPS Solut. 2015, 19, 1–10. [Google Scholar] [CrossRef]
- Xu, A.; Xu, Z.; Ge, M.; Xu, X.; Zhu, H.; Sui, X. Estimating zenith tropospheric delays from BeiDou navigation satellite system observations. Sensors 2013, 13, 4514–4526. [Google Scholar] [CrossRef] [PubMed]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Differential Code Bias Estimation using Multi-GNSS Observations and Global Ionosphere Maps. In Proceedings of the Institute of Navigation (ION) International Technical Meeting, San Diego, CA, USA, 26–28 January 2014.
- Guo, F.; Zhang, X.; Wang, J. Timing group delay and differential code bias corrections for BeiDou positioning. J. Geod. 2015, 89, 427–445. [Google Scholar] [CrossRef]
- Shi, C.; Fan, L.; Li, M.; Liu, Z.; Gu, S.; Zhong, S.; Song, W. An enhanced algorithm to estimate BDS satellite’s differential code biases. J. Geod. 2015, 90, 161–177. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J.G. Characterization of multi-GNSS between-receiver differential code biases using zero and short baselines. Chin. Sci. Bull. 2015, 21, 1840–1849. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Sleewaegen, J.M.; Huisman, L.; Teunissen, P. Characterization of compass M-1 signals. GPS Solut. 2012, 16, 117–126. [Google Scholar] [CrossRef]
- Wang, G.; de Jong, K.; Zhao, Q.; Hu, Z.; Guo, J. Multipath analysis of code measurements for BeiDou geostationary satellites. GPS Solut. 2015, 19, 129–139. [Google Scholar] [CrossRef]
- Tang, W.; Deng, C.; Shi, C.; Liu, J. Triple-frequency carrier ambiguity resolution for Beidou navigation satellite system. GPS Solut. 2014, 18, 335–344. [Google Scholar] [CrossRef]
- Zhang, X.; He, X. Performance analysis of triple-frequency ambiguity resolution with BeiDou observations. GPS Solut. 2015, 20, 269–281. [Google Scholar] [CrossRef]
- Yang, Y.; Li, J.; Wang, A.; Xu, J.; He, H.; Guo, H.; Dai, X. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system. Sci. China Earth Sci. 2014, 57, 144–152. [Google Scholar] [CrossRef]
- Li, M.; Qu, L.; Zhao, Q.; Guo, J.; Su, X.; Li, X. Precise Point Positioning with the BeiDou Navigation Satellite System. Sensors 2014, 14, 927–943. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X.; Wang, J.; Ren, X. Modeling and assessment of triple-frequency BDS precise point positioning. J. Geod. 2016. [Google Scholar] [CrossRef]
- Nadarajah, N.; Teunissen, P.J.G.; Raziq, N. BeiDou inter-satellite-type bias evaluation and calibration for mixed receiver attitude determination. Sensors 2013, 7, 9435–9463. [Google Scholar] [CrossRef] [PubMed]
- Nadarajah, N.; Teunissen, P.J.G.; Sleewaegen, J.M.; Montenbruck, O. The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solut. 2014, 19, 357–368. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Riley, S. A COMPASS for Asia: First Experience with the BeiDou-2 Regional Navigation System. Poster at IGS Workshop in Olsztyn, Poland 2012. Available online: http://www.igs.org/presents/poland2012/posters (accessed on 10 May 2015).
- Montenbruck, O.; Rizos, C.; Weber, R.; Weber, G.; Neilan, R.; Hugentobler, U. Getting a grip on multi-GNSS-the international GNSS service MGEX campaign. GPS World 2013, 24, 44–49. [Google Scholar]
- De Bakker, P.F.; Tiberius, C.C.J.M.; van der Marel, H.; van Bree, R.J.P. Short and zero baseline analysis of GPS L1 C/A, L5Q, GIOVE E1B, and E5aQ signals. GPS Solut. 2012, 16, 53–64. [Google Scholar] [CrossRef]
- Springer, T.; Dilssner, F. SVN49 and Other GPS Anomalies; Inside GNSS: Eugene, OR, USA, 2009; pp. 32–36. [Google Scholar]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Langley, R.B. Three’s the challenge. GPS World 2010, 21, 8–19. [Google Scholar]
- Pearson, K. Note on regression and inheritance in the case of two parents. Proc. R. Soc. Lond. 1895, 58, 240–242. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.B.; Mervart, L.; Hugentobler, U. IGS-MGEX: Preparing the Ground for Multi-Constellation GNSS Science; Inside GNSS: Eugene, OR, USA, 2014; Volume 9, pp. 42–49. [Google Scholar]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Zhang, X.; Andersen, O.B. Surface ice flow velocity and tide retrieval of the Amery ice shelf using precise point positioning. J. Geod. 2006, 80, 171–176. [Google Scholar] [CrossRef]
- Boehm, J.; Heinkelmann, R.; Schuh, H. A global model of pressure and temperature for geodetic applications. J. Geod. 2007, 81, 679–683. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions 2010 (IERS Technical Note No. 36); International Earth Rotation and Reference Systems Service: Frankfurt, Germany, 2010. [Google Scholar]
- Rizos, C.; Montenbruck, O.; Weber, R.; Neilan, R.; Hugentobler, U. The IGS MGEX Experiment as a Milestone for a Comprehensive Multi-GNSS Service. In Proceedings of Institute of Navigation Pacific Positioning, Navigation and Timing (ION Pacific PNT), Honolulu, HI, USA, 23–25 April 2013; pp. 289–295.
- Wu, J.; Wu, S.; Hajj, G.; Bertiger, W.; Lichten, S. Effects of antenna orientation on GPS carrier phase. Manuscr. Geod. 1993, 18, 91–98. [Google Scholar]
- Melbourne, W.G. The case for ranging in GPS-based geodetic systems. In Proceedings of the first International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; pp. 373–386.
- Wübbena, G. Software developments for geodetic positioning with GPS using TI 4100 code and carrier measurements. In Proceedings of the 1st International Symposium on Precise Positioning with the Global Positioning Systems, Rockville, MD, USA, 15–19 April 1985; pp. 403–412.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GPS | BeiDou | |||
|---|---|---|---|---|
| GEO | IGSO | MEO | ||
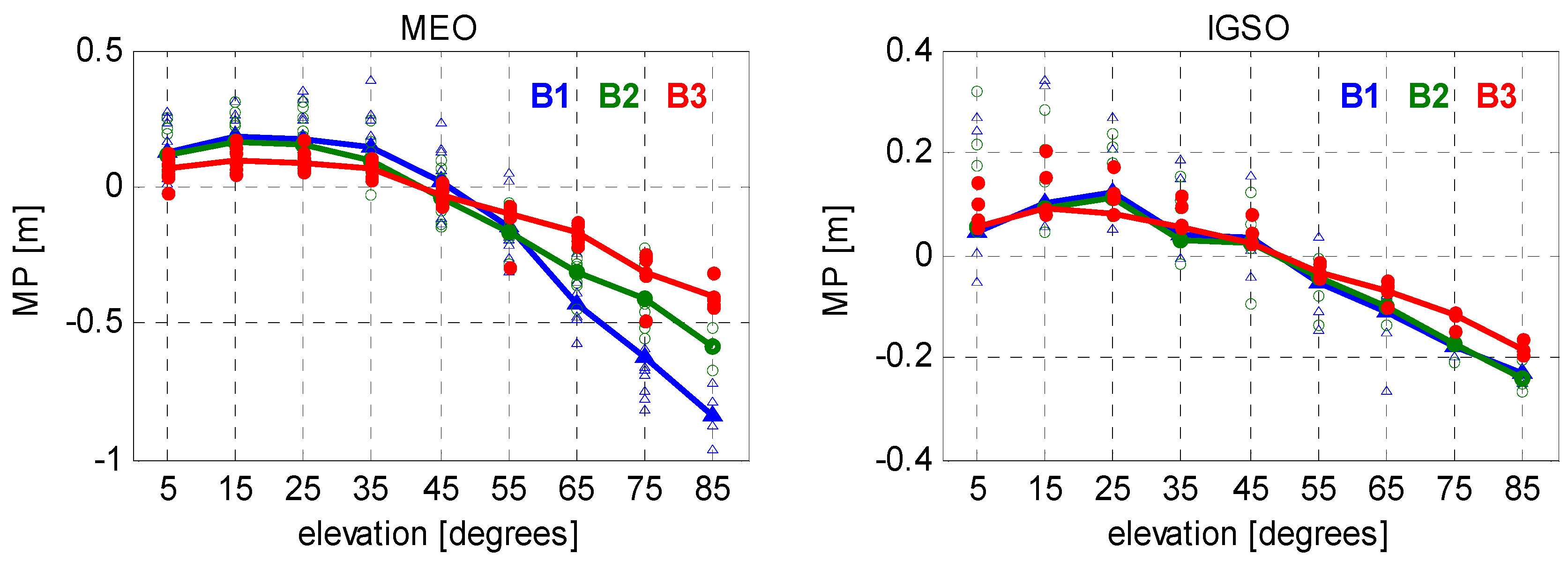
| MP1 | −0.04 | −0.01 | −0.49 | −0.61 |
| MP2 | 0.08 | 0.00 | −0.48 | −0.60 |
| MP3 | 0.12 | −0.02 | v0.39 | −0.36 |
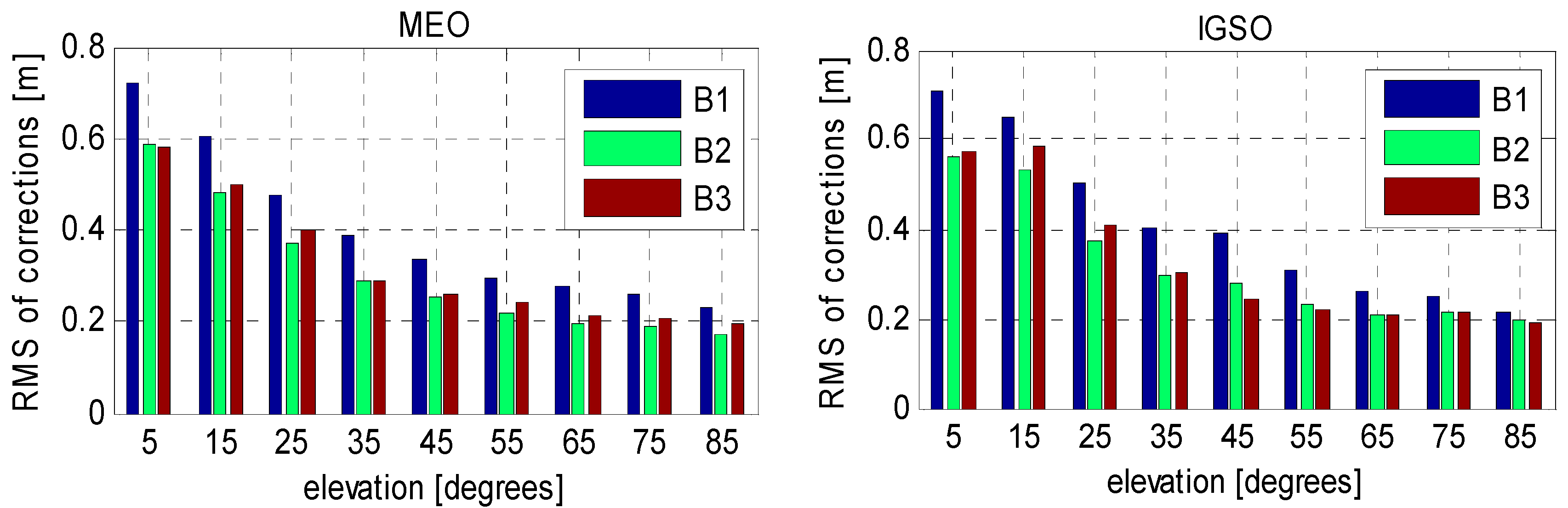
| Elevation Nodes (°) | Correction Values (m) | RMS of Corrections (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MEOs | IGSOs | MEOs | IGSOs | |||||||||
| B1 | B2 | B3 | B1 | B2 | B3 | B1 | B2 | B3 | B1 | B2 | B3 | |
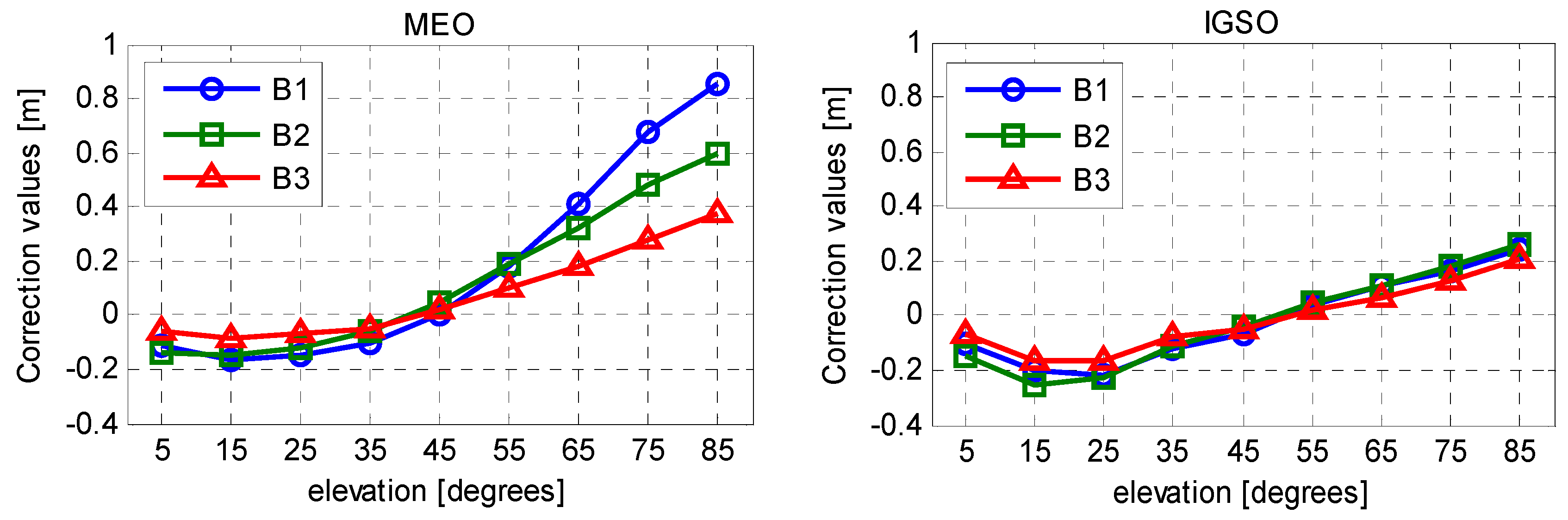
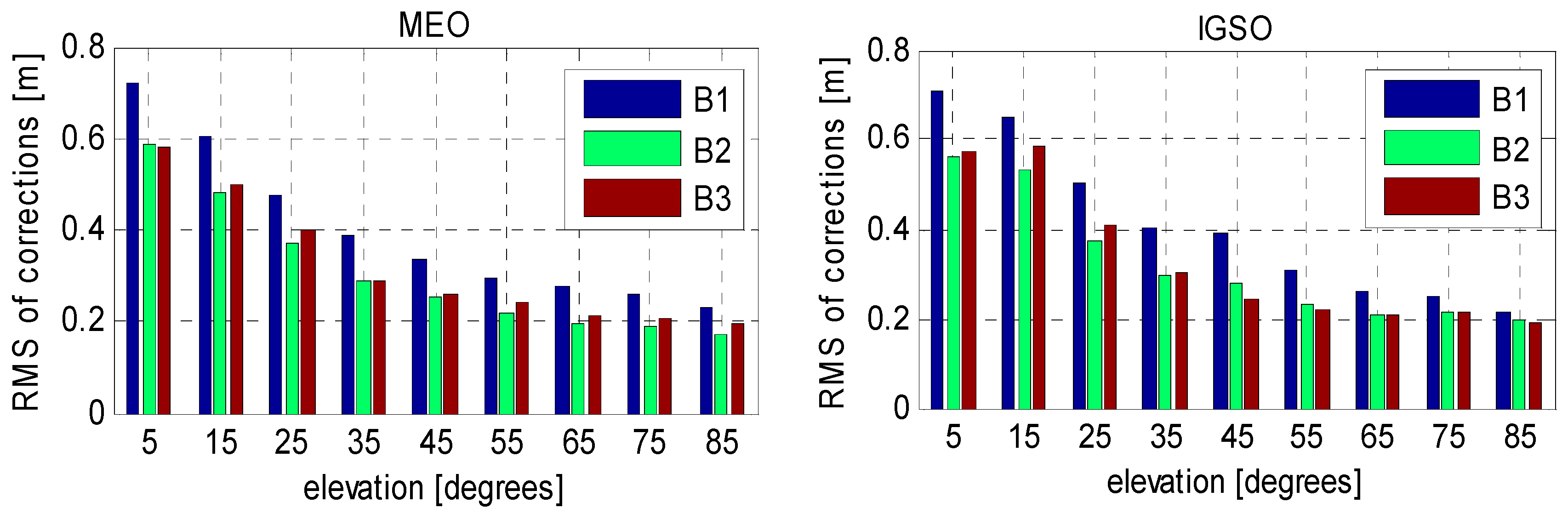
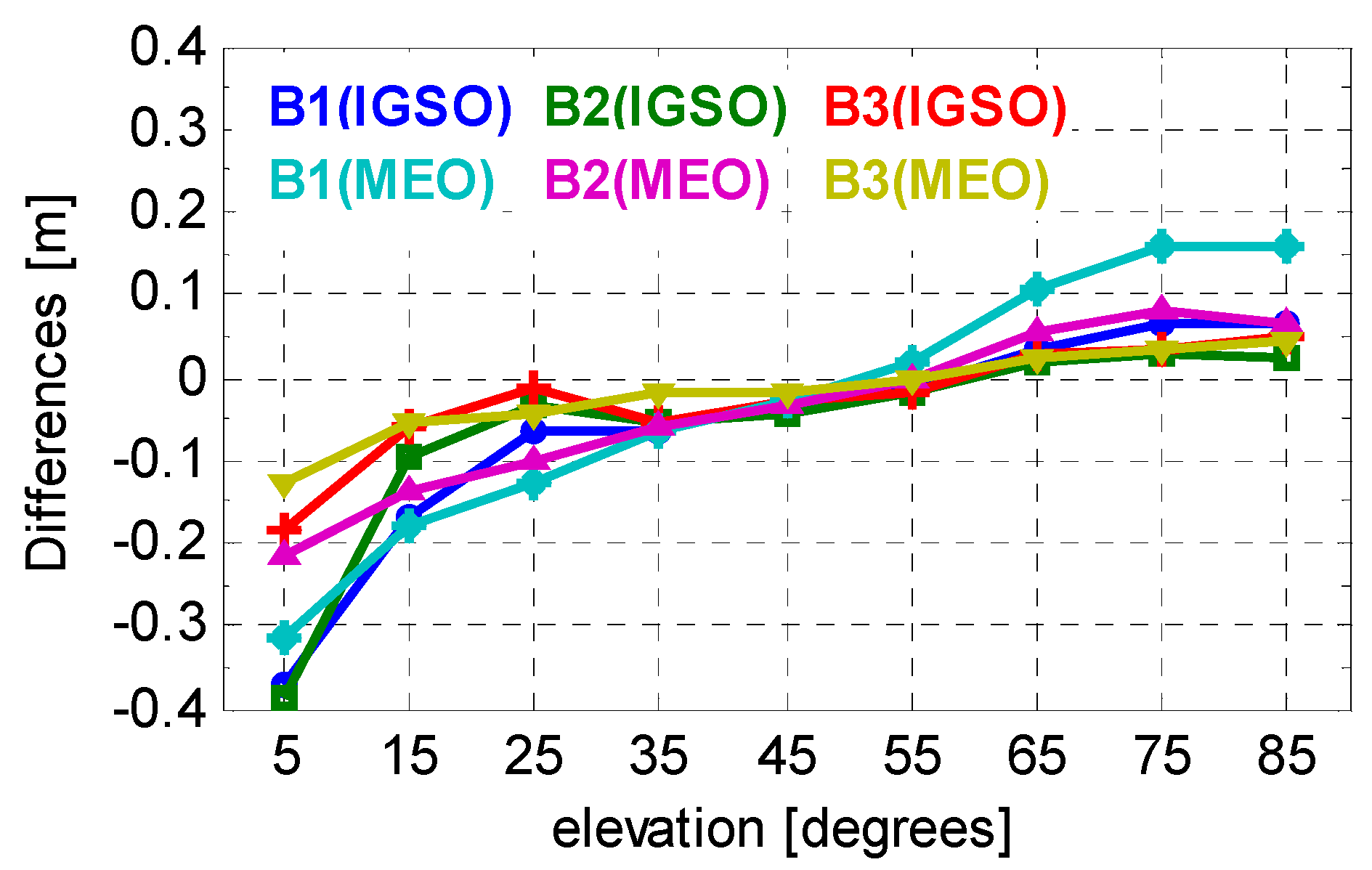
| 5 | −0.109 | −0.140 | −0.060 | −0.101 | −0.148 | −0.065 | 0.721 | 0.588 | 0.580 | 0.709 | 0.564 | 0.576 |
| 15 | −0.169 | −0.148 | −0.087 | −0.203 | −0.250 | −0.162 | 0.605 | 0.480 | 0.499 | 0.651 | 0.532 | 0.582 |
| 25 | −0.150 | −0.121 | −0.070 | −0.222 | −0.224 | −0.168 | 0.476 | 0.373 | 0.401 | 0.500 | 0.371 | 0.409 |
| 35 | −0.105 | −0.062 | −0.053 | −0.123 | −0.110 | −0.078 | 0.388 | 0.291 | 0.290 | 0.403 | 0.297 | 0.303 |
| 45 | 0.004 | 0.047 | 0.022 | −0.066 | −0.043 | −0.049 | 0.333 | 0.254 | 0.258 | 0.389 | 0.278 | 0.244 |
| 55 | 0.181 | 0.185 | 0.096 | 0.036 | 0.044 | 0.021 | 0.293 | 0.220 | 0.241 | 0.308 | 0.230 | 0.223 |
| 65 | 0.411 | 0.326 | 0.180 | 0.107 | 0.106 | 0.068 | 0.275 | 0.194 | 0.211 | 0.262 | 0.210 | 0.208 |
| 75 | 0.674 | 0.477 | 0.280 | 0.163 | 0.178 | 0.130 | 0.261 | 0.188 | 0.206 | 0.251 | 0.213 | 0.212 |
| 85 | 0.853 | 0.600 | 0.373 | 0.245 | 0.260 | 0.208 | 0.233 | 0.173 | 0.198 | 0.217 | 0.195 | 0.190 |
| Items | Models |
|---|---|
| Estimator (engine) | Kalman filter, TriP software [31] |
| Observations | B1/B2 code and carrier phase measurements |
| Sampling rate | 30 s |
| Elevation cutoff | 10° |
| Weighting scheme | Elevation dependent; 3 mm and 0.3 m for raw phase and code, respectively |
| Ionospheric delay | Eliminated by Ionosphere-free combination (s) |
| Tropospheric delay | Dry component: corrected with GPT model [32] wet component: estimated as random-walk process, GMF mapping function |
| Relativistic Effect | Applied |
| Station displacement | Corrected by IERS Convention 2010, including Solid Earth tide and ocean tide loading [33] |
| Satellite antenna phase center offset | Corrected with conventional PCO values from MGEX [34] |
| Receiver antenna phase center offset | Corrected by the same PCO values as GPS |
| Phase-windup effect | Corrected [35] |
| Receiver clock | Estimated, epoch-wise solution |
| Station coordinate | Estimated, epoch-wise solution |
| Phase ambiguities | Estimated, constant for each arc; float value |
| Convergence Time (min) | Schemes | ||
|---|---|---|---|
| Uncorrected | Traditional | Improved | |
| GMSD | 125 | 108.5 | 29.5 |
| CUT0 | 130 | 134 | 36 |
| JFNG | 76 | 136 | 32.5 |
| XIMS | 157 | 162 | 55 |
| NNOR | 130 | 127 | 33.5 |
| Average | 123.6 | 133.5 | 37.3 |
| IGSO | MEO | |||||
|---|---|---|---|---|---|---|
| None | Traditional | Improved | None | Traditional | Improved | |
| Mean | 0.009 | 0.009 | 0.009 | 0.000 | 0.000 | 0.000 |
| STD | 1.166 | 1.155 | 1.152 | 1.802 | 1.730 | 1.740 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, F.; Li, X.; Liu, W. Mitigating BeiDou Satellite-Induced Code Bias: Taking into Account the Stochastic Model of Corrections. Sensors 2016, 16, 909. https://doi.org/10.3390/s16060909
Guo F, Li X, Liu W. Mitigating BeiDou Satellite-Induced Code Bias: Taking into Account the Stochastic Model of Corrections. Sensors. 2016; 16(6):909. https://doi.org/10.3390/s16060909
Chicago/Turabian StyleGuo, Fei, Xin Li, and Wanke Liu. 2016. "Mitigating BeiDou Satellite-Induced Code Bias: Taking into Account the Stochastic Model of Corrections" Sensors 16, no. 6: 909. https://doi.org/10.3390/s16060909
APA StyleGuo, F., Li, X., & Liu, W. (2016). Mitigating BeiDou Satellite-Induced Code Bias: Taking into Account the Stochastic Model of Corrections. Sensors, 16(6), 909. https://doi.org/10.3390/s16060909