
Dispersion of Heat Flux Sensors Manufactured in Silicon Technology

Abstract
:1. Introduction
2. Sensor Design and Modeling
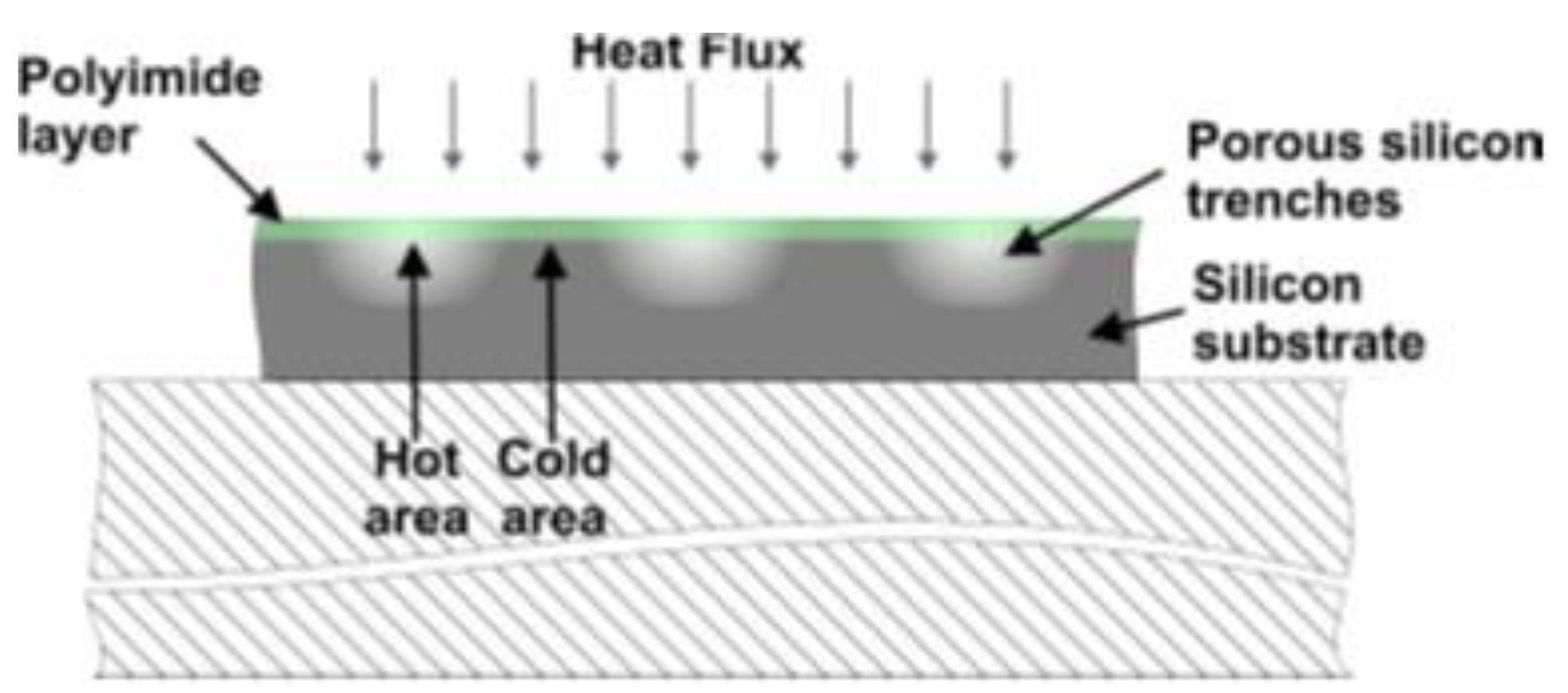
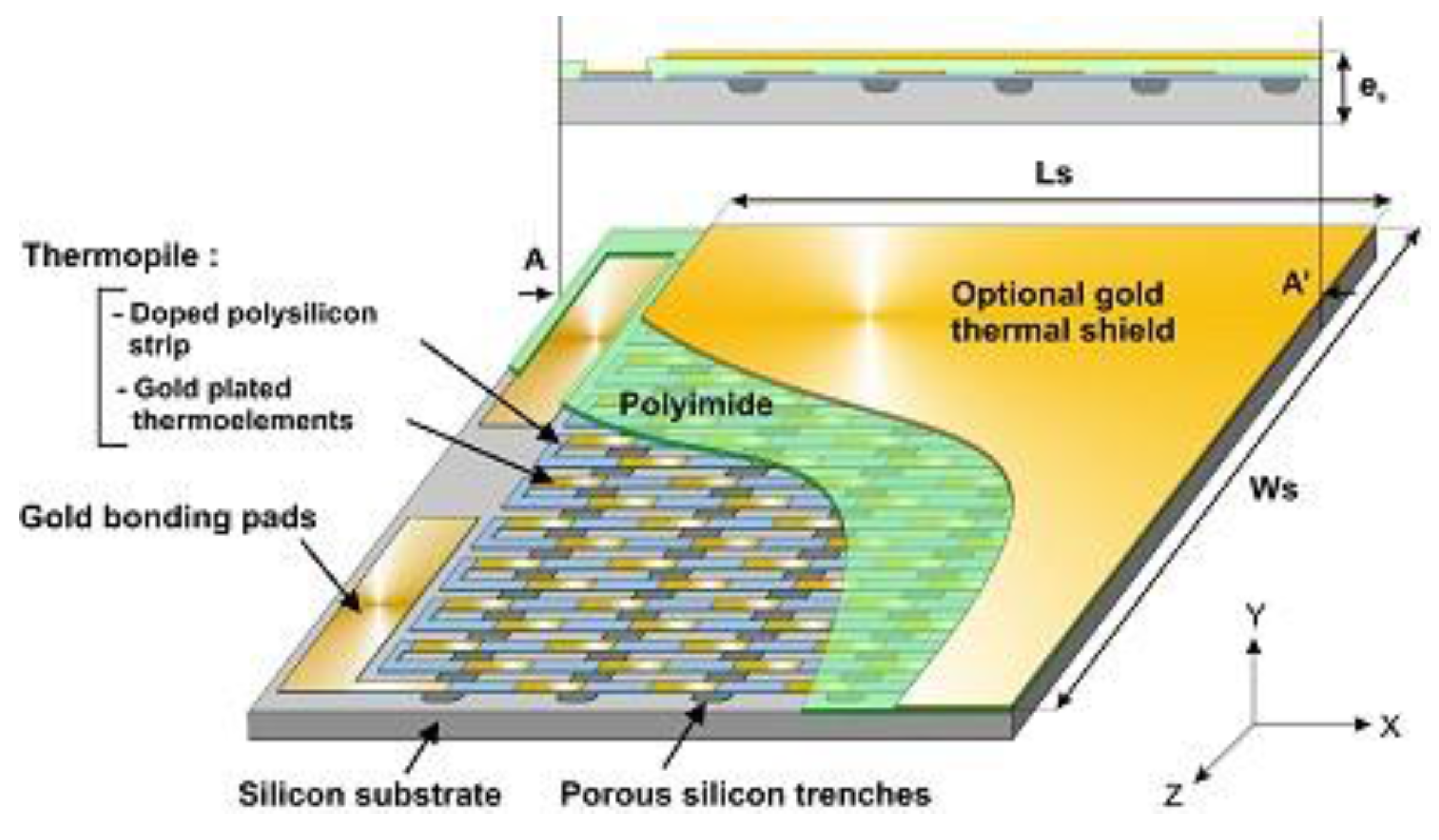
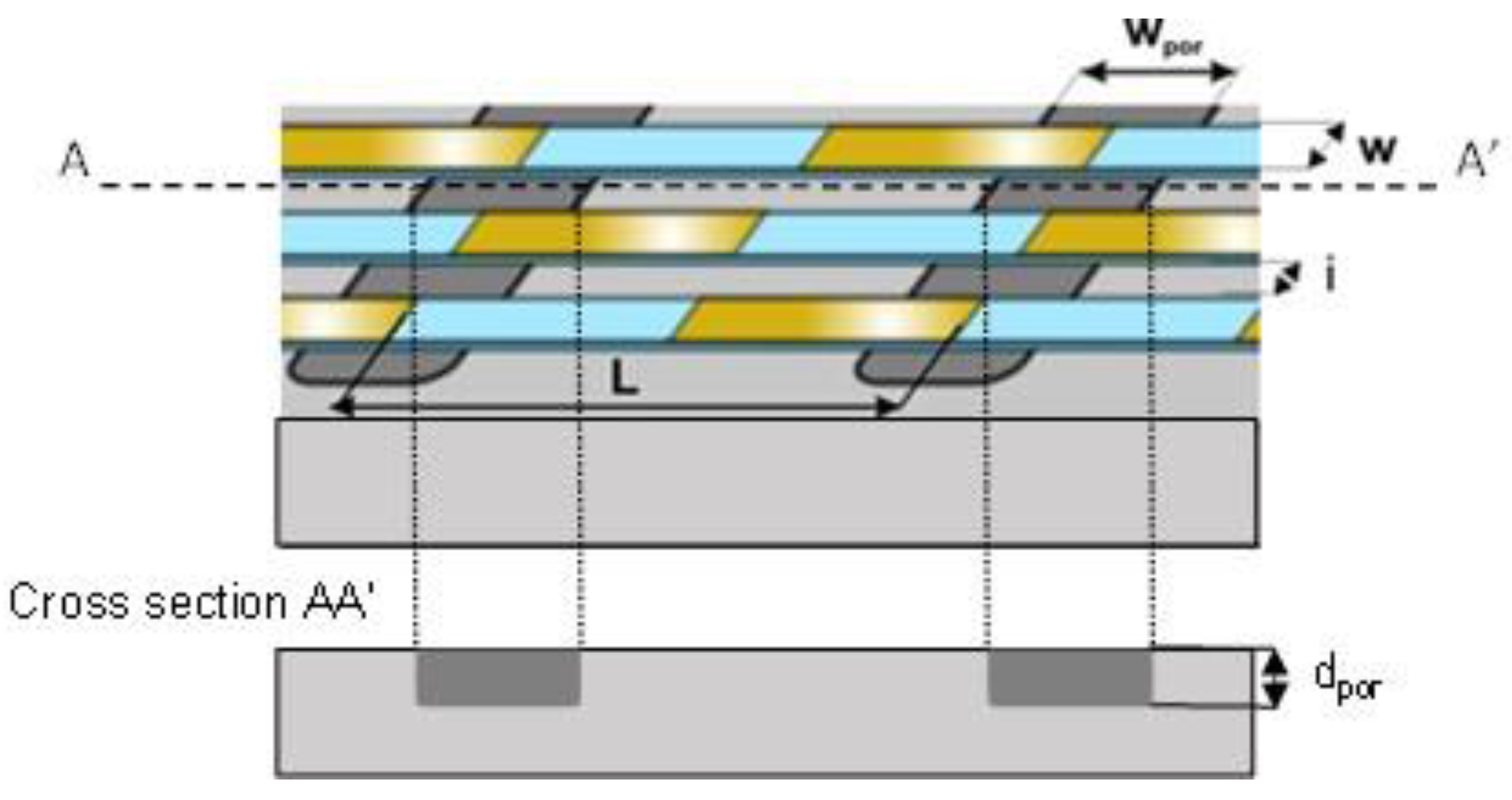
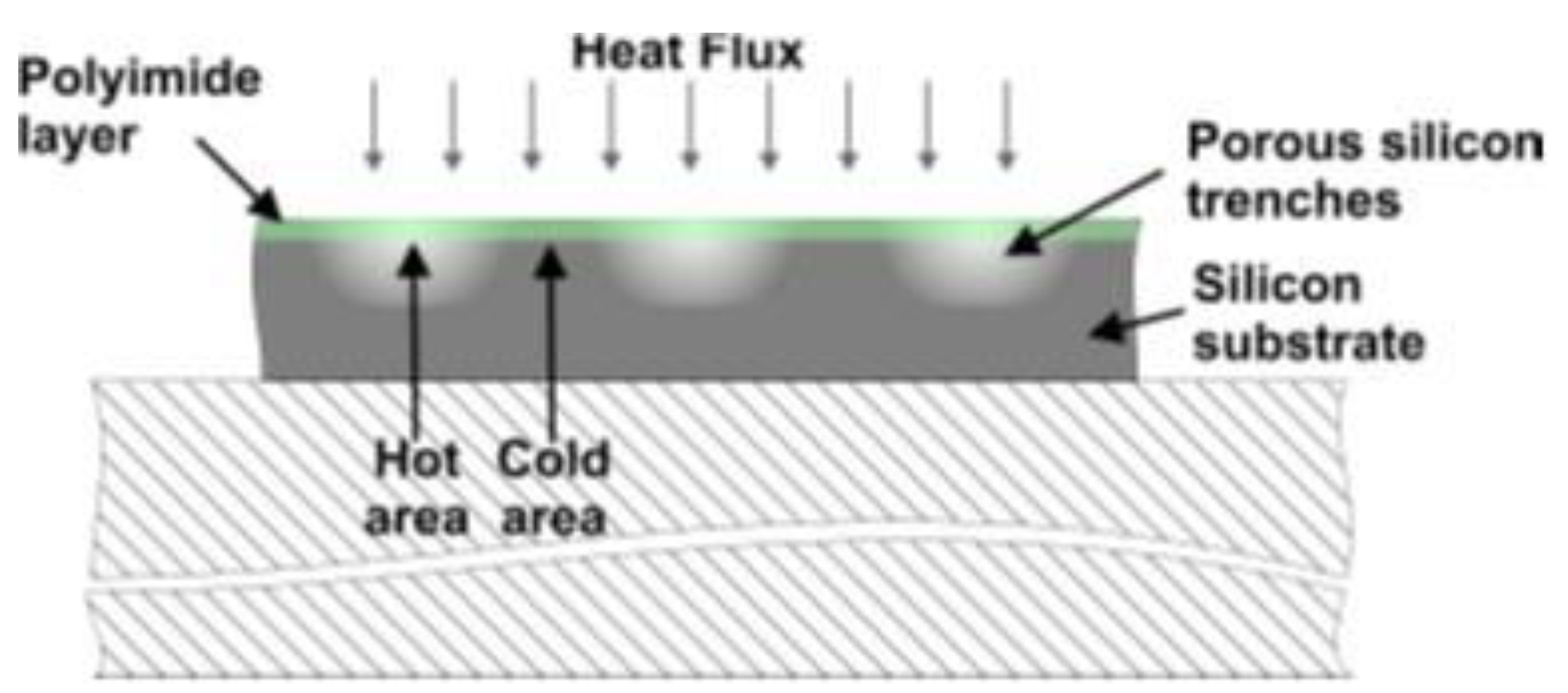
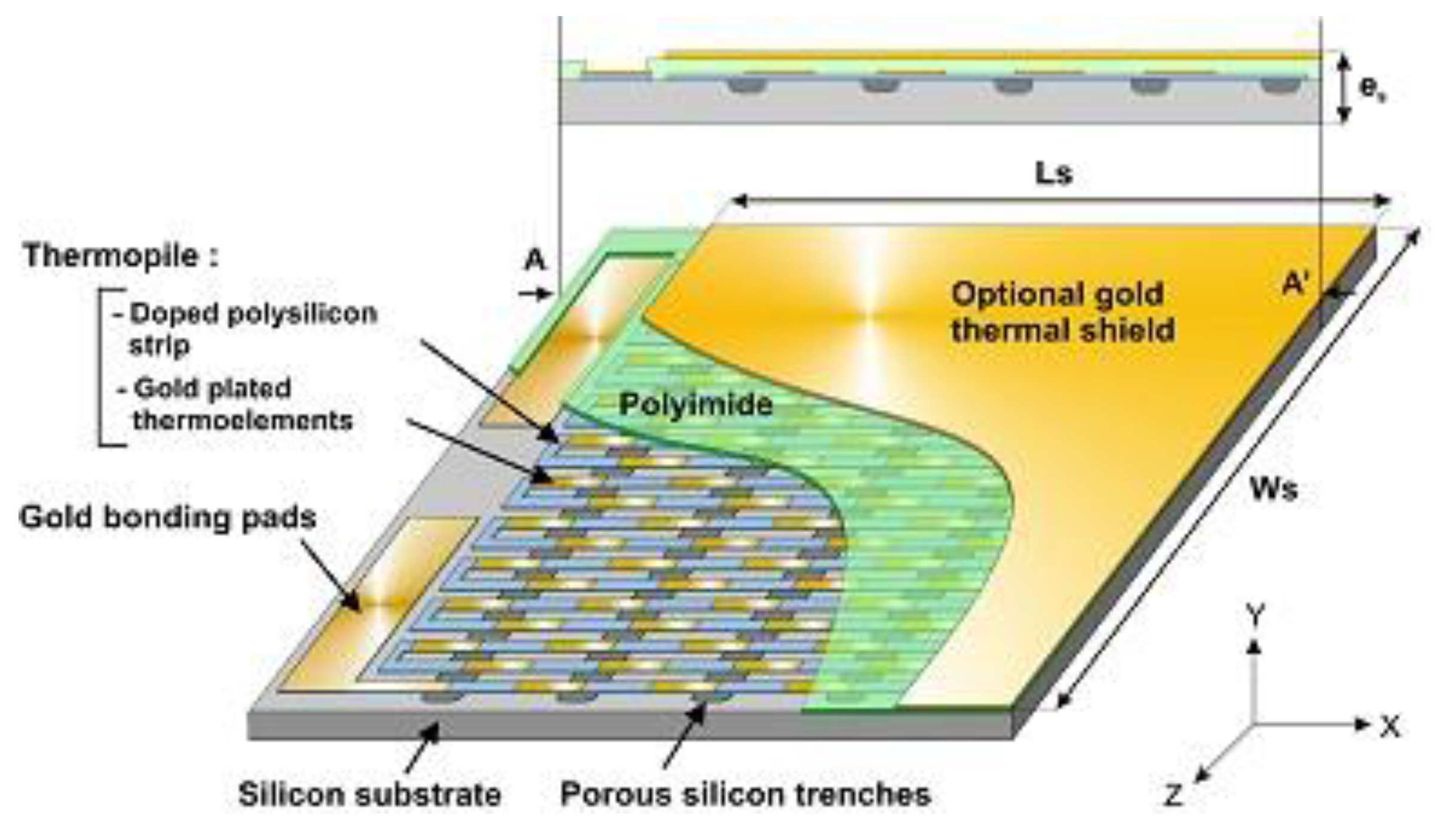
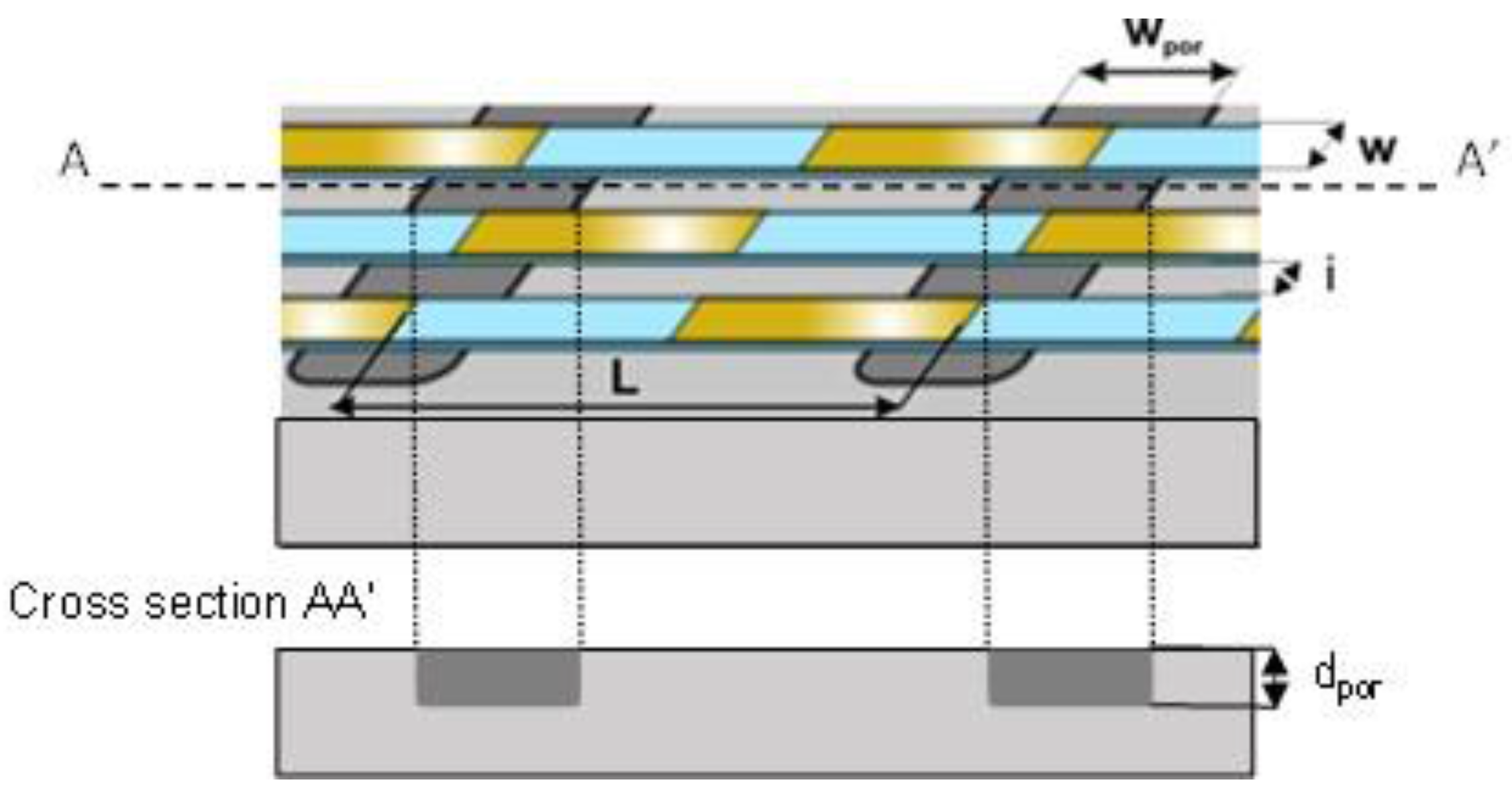
2.1. Sensor Description
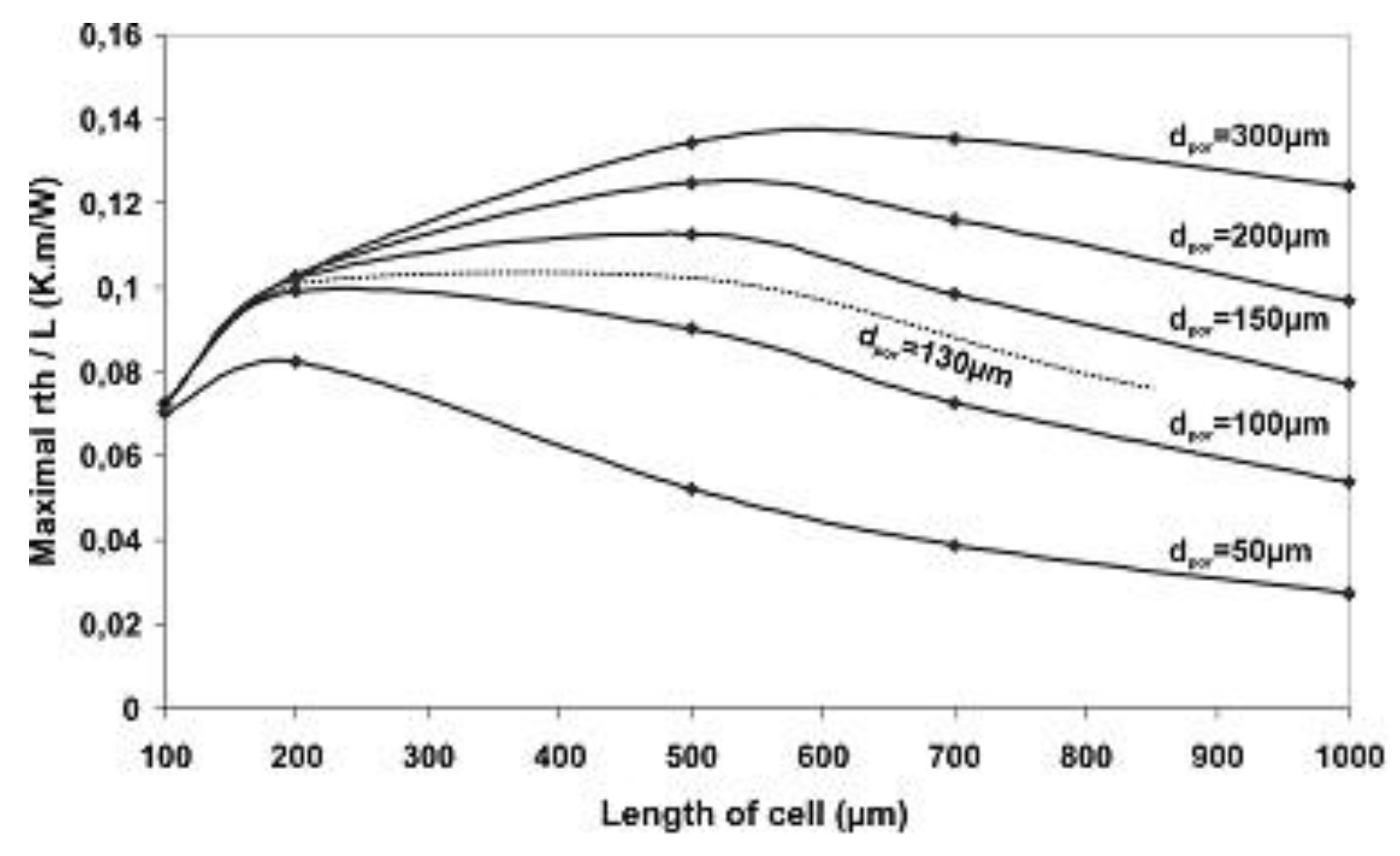
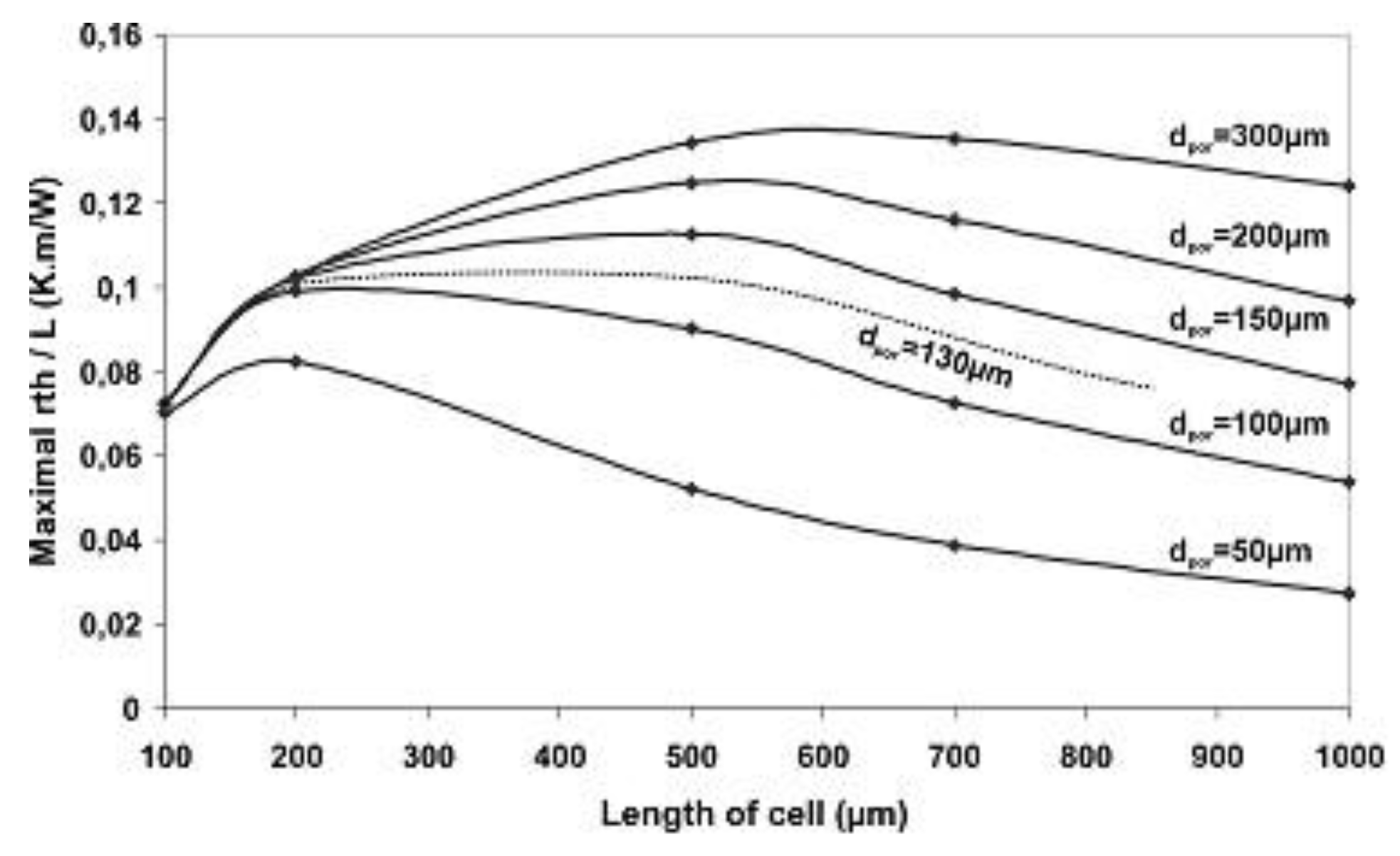
2.2. Thermal Modeling
3. Experimental Results and Discussion
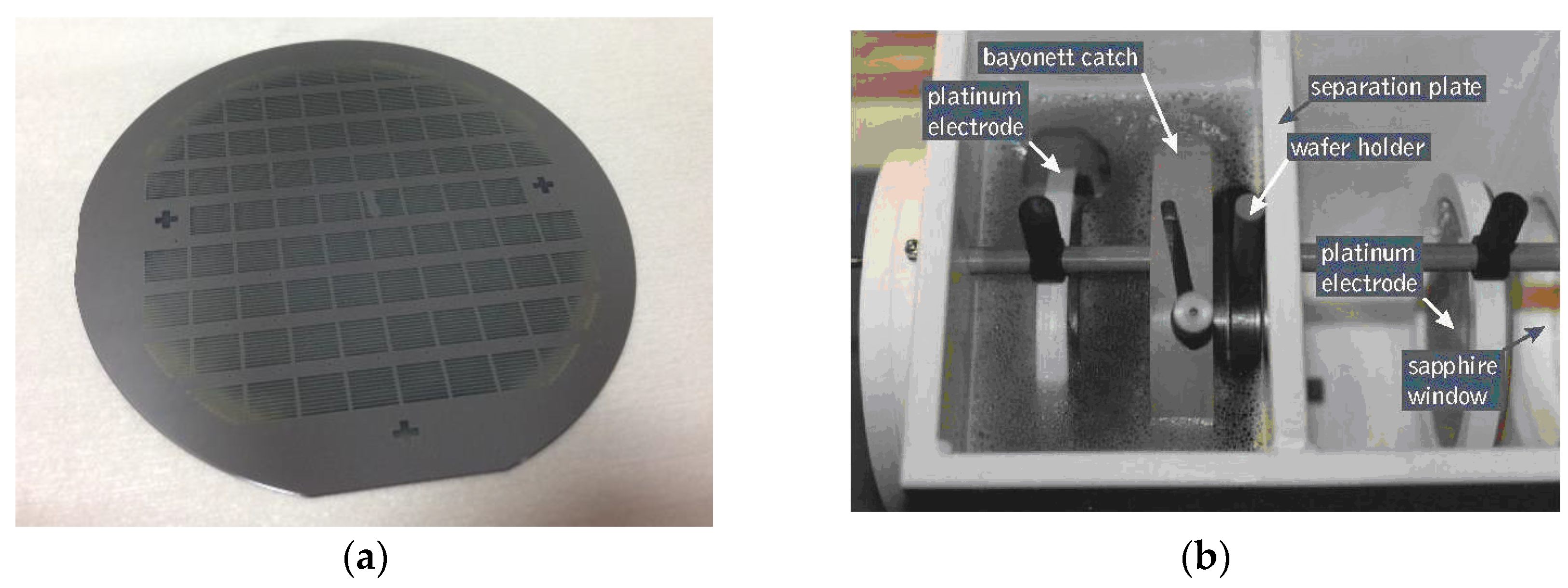
3.1. Sensor Fabrication
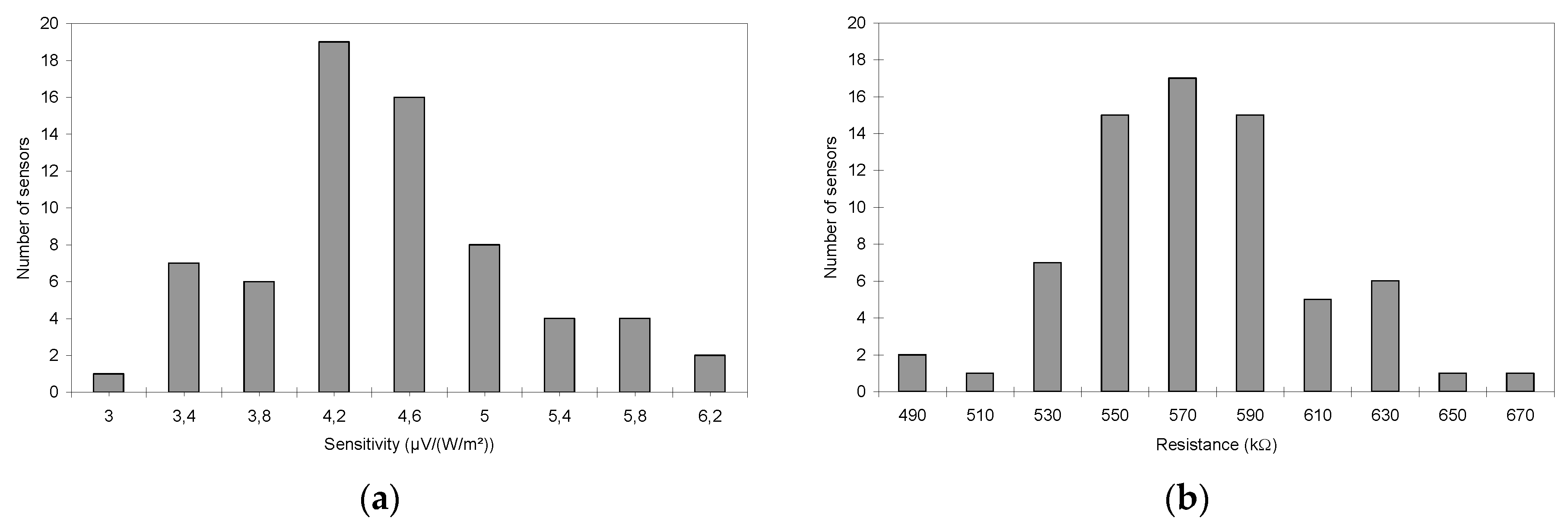
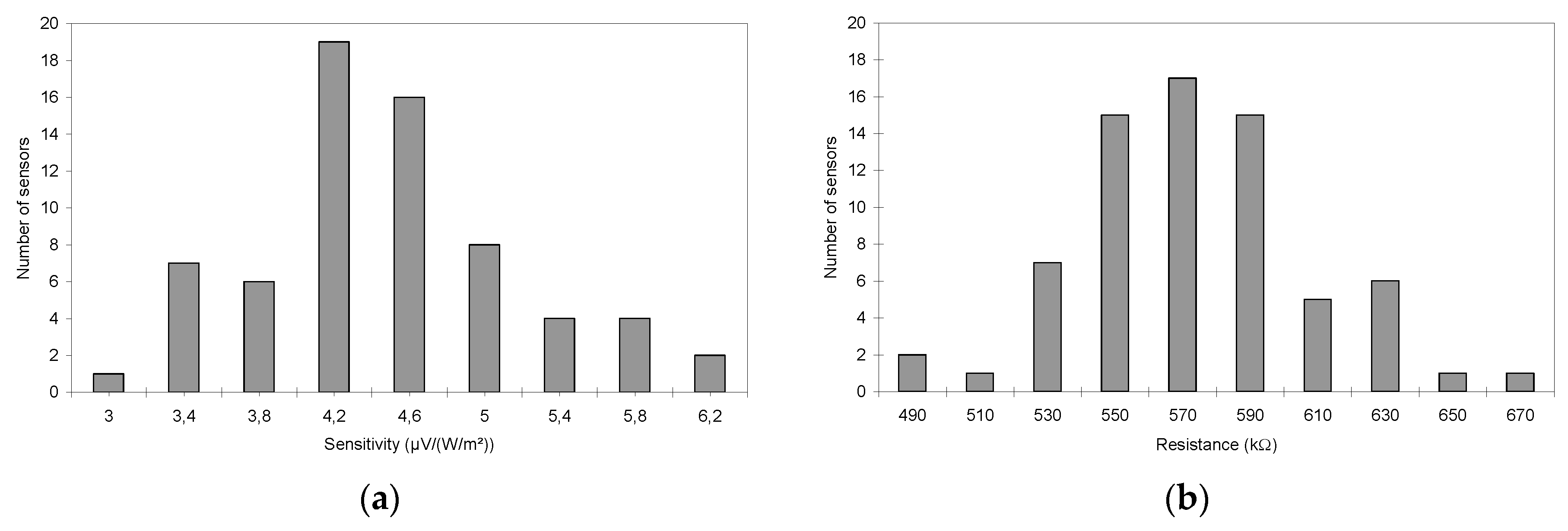
3.2. Sensor Characterizations
3.3. Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lenggenhager, R.; Baltes, H.; Elbel, T. Thermoelectric infrared sensors in CMOS technology. Sens. Actuators A Phys. 1993, 14, 216–220. [Google Scholar] [CrossRef]
- Sion, C.; Godts, P.; Ziouche, K.; Bougrioua, Z.; Lasri, T.; Leclercq, D. Unpackaged infrared thermoelectric microsensor realized on suspended membrane by silicon technology. Sens. Actuators A Phys. 2012, 175, 78–86. [Google Scholar] [CrossRef]
- Zhou, H.; Kropelnicki, P.; Tsai, J.M.; Lee, C. Development of a thermopile infrared sensor using stacked double polycrystalline silicon layers based on the CMOS process. J. Micromech. Microeng. 2013. [Google Scholar] [CrossRef]
- Boutchich, M.; Ziouche, K.; Ait-Hammouda Yala, M.; Godts, P.; Leclercq, D. Package free infrared microsensor using thermopile. Sens. Actuators A Phys. 2005, 121, 52–58. [Google Scholar] [CrossRef]
- De Vrient, A.B. La Transmission de la Chaleur, 3rd ed.; Morin, G., Ed.; Boucherville, QC, Canada, 1992; Volume 2. [Google Scholar]
- Ziouche, K.; Godts, P.; Leclercq, D. Polyimid resist as infrared absorbing layer for radiation microsensors. Sens. Mater. 2000, 12, 445–454. [Google Scholar]
- Ziouche, K.; Boutchich, M.; Bernard, D.; Godts, P.; Leclercq, D. A New Ultra-Violet Microradiometer. In Proceedings of the International Frequency Sensor Association, Nuremberg, Germany, 9 May 2001.
- Godts, P.; Dupont, D.; Leclercq, D. Direct measurement of the latent heat of evaporation by flowmetric method. IEEE Trans. Instrum. Meas. 2005, 54, 2364–2369. [Google Scholar] [CrossRef]
- Mancier, V.; Leclercq, D. Power dissipated measurement of an ultrasonic generator in a viscous medium by flowmetric method. Ultrason. Sonochem. 2008, 15, 973–980. [Google Scholar] [CrossRef] [PubMed]
- Ziouche, K.; Godts, P.; Bougrioua, Z.; Sion, C.; Lasri, T.; Leclercq, D. Quasi-monolithic heat-flux microsensor based on porous silicon boxes. Sens. Actuators A Phys. 2010, 164, 35–40. [Google Scholar] [CrossRef]
- Drost, A.; Steiner, P.; Moser, H.; Lang, W. Thermal conductivity of porous silicon. Sens. Mater. 1995, 7, 111–120. [Google Scholar]
- Benedetto, G.; Boarino, L.; Brunetto, N.; Rossi, A.; Spagnolo, R.; Amato, G. Thermal properties of porous silicon layers. Philos. Mag. Part B 1997, 76, 383–393. [Google Scholar] [CrossRef]
- Ziouche, K.; Bougrioua, Z.; Lejeune, P.; Lasri, T.; Leclercq, D. Probing Technique for Localized Thermal Conductivity Measurement. Meas. Sci. Technol. 2015. [Google Scholar] [CrossRef]
- Özisik, M.N. Heat Conduction; John Wiley and Sons: New York, NY, USA, 1993. [Google Scholar]
- Lysenko, V.; Roussel, P.; Remaki, B.; Delhomme, G.; Dittmar, A.; Barbier, D.; Martelet, C.; Strikha, V.; Boarino, L.; Bertola, M.; et al. Formation of thick oxidized meso porous silicon layers with low thermal conductivity for thermal isolation applications. In Proceedings of the Therminic’98, International Workshop on Thermal Investigations of IC’s and Microstructures, Cannes, France, 28 September 1998; pp. 51–56.
- Boutchich, M.; Ziouche, K.; Godts, P.; Leclercq, D. Characterization of Phosphorus and Boron Heavily. IEEE Electron Device Lett. 2002, 23, 139–141. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ρpoly (mΩ·cm) | α (µV/K) at 298 K | epoly (nm) | |
|---|---|---|---|
| Dispersion | 0.0205–0.024 | 220–260 | 570–620 |
| Column | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Ligne | |||||||||||
| 1 | Sensor number | 1 | 2 | 3 | 4 | 5 | 6 | ||||
| R (kΩ) | 637 | 570 | 580 | 675 | 570 | 557 | |||||
| Se (µV/(W/m²)) | 2 | 3.9 | 3.39 | 3.9 | 3.23 | 2.02 | |||||
| 2 | Sensor number | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | ||
| R (kΩ) | 548 | 560 | 570 | 570 | 589 | 657 | 620 | 584 | |||
| Se (µV/(W/m²)) | 4.59 | 3.47 | 5.44 | 4.5 | 4.2 | 4.15 | 3.44 | 3.32 | |||
| 3 | Sensor number | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| R (kΩ) | 577 | 573 | 571 | 569 | 590 | 550 | 530 | 588 | 625 | 597 | |
| Se (µV/(W/m²)) | 3.54 | 5.73 | 3.97 | 3.91 | 3.86 | 4 | 4.5 | 4.63 | 4.76 | 3.24 | |
| 4 | Sensor number | 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | 33 | - |
| R (kΩ) | 547 | 570 | 550 | 538 | 620 | 570 | 565 | 612 | 590 | ||
| Se (µV/(W/m²)) | 6.46 | 5.3 | 4.78 | 4.12 | 3.9 | 4.17 | 4.12 | 4.3 | 4.46 | ||
| 5 | Sensor number | 34 | 35 | 36 | 37 | 38 | 39 | 40 | 41 | ||
| R (kΩ) | 552 | 435 | 530 | 545 | 490 | 573 | 580 | 620 | |||
| Se (µV/(W/m²)) | 6.13 | 4.3 | 4.45 | 4.1 | 4.12 | 4.29 | 4.64 | 5.24 | |||
| 6 | Sensor number | 42 | 43 | 44 | 45 | 46 | 47 | 48 | 49 | 50 | 51 |
| R (kΩ) | 537 | 535 | 278 | 554 | 535 | 525 | 485 | 596 | 604 | 620 | |
| Se (µV/(W/m²)) | 6.56 | 5.57 | 2.35 | 4.54 | 4.19 | 4.23 | 4.2 | 4.23 | 4.49 | 6.02 | |
| 7 | Sensor number | 52 | 53 | 54 | 55 | 56 | 57 | 58 | 59 | 60 | 61 |
| R (kΩ) | 136 | 556 | 556 | 564 | 531 | 546 | 555 | 606 | 588 | 585 | |
| Se (µV/(W/m²)) | 3 | 5.57 | 4.56 | 4.38 | 4.1 | 4.15 | 4.53 | 4.35 | 4.94 | 5 | |
| 8 | Sensor number | 62 | 63 | 64 | 65 | 66 | 67 | 68 | - | ||
| R (kΩ) | 550 | 575 | 561 | 350 | 585 | 585 | 605 | ||||
| Se (µV/(W/m²)) | 5.84 | 4.49 | 4.49 | 2.8 | 4.9 | 4.9 | 4.24 | ||||
| 9 | Sensor number | 69 | 70 | 71 | 72 | 73 | 74 | ||||
| R (kΩ) | 557 | 516 | 574 | 584 | 598 | 600 | |||||
| Se (µV/(W/m²)) | 2.35 | 5.7 | 5.2 | 5.2 | 4.52 | 1.57 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ziouche, K.; Lejeune, P.; Bougrioua, Z.; Leclercq, D. Dispersion of Heat Flux Sensors Manufactured in Silicon Technology. Sensors 2016, 16, 853. https://doi.org/10.3390/s16060853
Ziouche K, Lejeune P, Bougrioua Z, Leclercq D. Dispersion of Heat Flux Sensors Manufactured in Silicon Technology. Sensors. 2016; 16(6):853. https://doi.org/10.3390/s16060853
Chicago/Turabian StyleZiouche, Katir, Pascale Lejeune, Zahia Bougrioua, and Didier Leclercq. 2016. "Dispersion of Heat Flux Sensors Manufactured in Silicon Technology" Sensors 16, no. 6: 853. https://doi.org/10.3390/s16060853
APA StyleZiouche, K., Lejeune, P., Bougrioua, Z., & Leclercq, D. (2016). Dispersion of Heat Flux Sensors Manufactured in Silicon Technology. Sensors, 16(6), 853. https://doi.org/10.3390/s16060853