1. Introduction
Angle estimation is about estimating the direction of arrivals of the received radar signals. Traditional monopulse angle estimation methods can be classified into two types: amplitude comparison methods [
1,
2,
3,
4,
5] and phase comparison methods [
3,
4,
5,
6,
7,
8,
9,
10,
11]. In amplitude comparison methods, the ratio of the difference channel output to the sum channel output (commonly called the delta-over-sum (DOS) ratio) is first calculated. The angle of arrival (AOA) is then estimated according to the known relationship between the DOS ratio and a target angle. However, under noisy circumstances, the DOS ratio may be biased and the angular accuracy of amplitude comparison could be relatively low.
In monopulse phase comparison methods, angle estimation is implemented by measuring the phase difference between the received signals of two antennas or two identical antenna elements. The target angle can then be calculated according to the relationship between the phase difference and the antenna spacing. Although the accuracy of phase comparison angle estimation is high, it is sensitive to noise, especially in low signal-to-noise ratio (SNR) conditions. Moreover, when the phase difference is larger than , the estimated angle will be ambiguous.
The two angle estimation methods above are commonly adopted in narrowband radars. Since range resolution is normally inversely proportional to the bandwidth of the transmitted pulses, wideband radars can be capable of forming the high resolution range profile (HRRP) of a target from the radar returns [
12,
13,
14]. Due to the high range resolution of wideband signals, the target may occupy multiple range cells. If the traditional monopulse angle estimations are used for wideband signals, only the dominant scatterer of the target can be used to estimate the direction of arrivals. This means that the energy scattering from the target cannot be accumulated and may lead to the loss of SNR. Although the HRRP may be beneficial to estimating the target angle, angle estimation used for wideband signals is little investigated in previous works.
Wideband radars transmit wideband waveforms, such as direct short pulses, digital phase coding signals, discrete frequency coding signals, and linear frequency modulated (LFM) pulses. This paper focuses on the angle estimation for wideband LFM signals and a novel monopulse angle estimation algorithm is proposed. By performing cross-correlation operation to the signals received by different parts of an antenna, the energy of the received echo signals from different scatterers of a target can be accumulated, and the AOA can be estimated from the cross-correlation function (CCF). In the proposed algorithm, the original angle estimation problem is converted to estimating the frequency of the CCF. More importantly, since the impact of noise on the frequency of a sinusoid is much less than the phase impact, the proposed algorithm can work well in low SNR conditions.
The rest of this paper is organized as follows. The conventional monopulse amplitude comparison angle estimation is first presented in
Section 2. In
Section 3, the proposed monopulse angle estimation method based on cross-correlation operation is introduced. The implementation of the proposed method is discussed in
Section 4. The SNR analysis is given in
Section 5, and the simulation results are shown in
Section 6. Finally, we conclude in
Section 7.
2. Conventional Monopulse Amplitude Comparison Angle Estimation
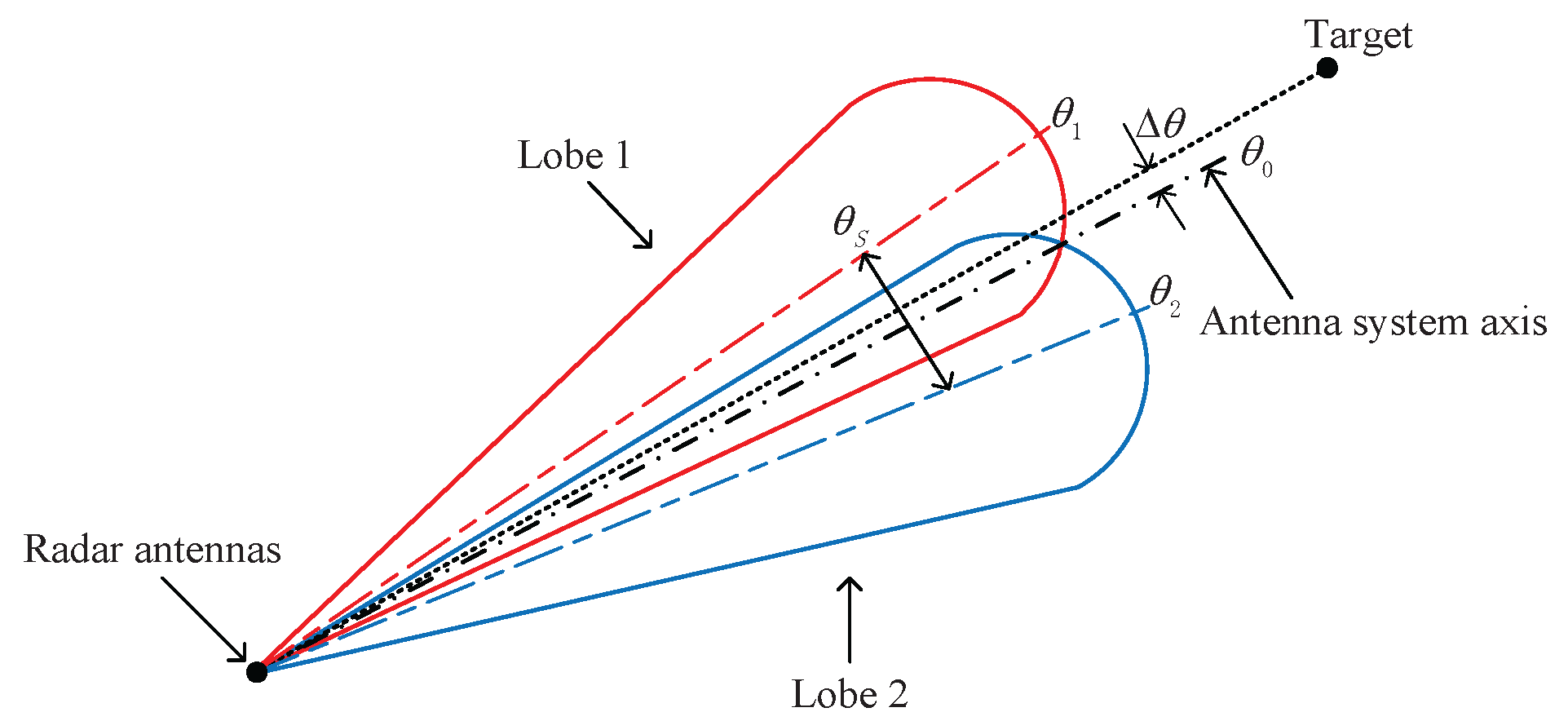
Before we introduce the proposed method, we briefly discuss the principles of the classical monopulse amplitude comparison angle estimation in this section. As shown in
Figure 1, the amplitude comparison monopulse system should have
X equal antennas with overlapping patterns, where the two main beams are squinted at a certain angle
, and usually in such a way that they overlap at the 3 dB-point of the beams.
Two resulting patterns (i.e., sum pattern and difference pattern) are obtained by adding and subtracting the signals from the X antennas. The received sum signal is used for target detection, range measurement, and as the phase reference for determining the sign of angle error measurement. The magnitude of the angle error is determined by the difference signal. The angle error is measured in reference to the antenna system axis .
In the following, the computation of the error signals is presented. Without loss of generality, the elevation error signal is considered. The signals received from
X antennas are
, where the signal
S is an
dimensional matrix. Suppose that the weights for the phase shift of the sum pattern are
, where the weights
is a
dimensional matrix. Then, the output of the sum pattern is
. The weights for the phase shift of the two overlapping patterns pointing to
and
are
and
, respectively. Thus, the outputs of the two overlapping patterns are
and
, respectively, and the output of the difference pattern is
. If
, then both channels have the same phase
. Alternatively, if
, then the two channels are
out of phase. Thus, the error signal output is
where
ξ is the phase angle between the sum and difference channels, and it is equal to
or
.
In practice, however, the DOS ratio may be biased under the influence of noise. In addition, angle estimation can only take place within a narrow region near the boresight.
4. Implementation of The Proposed Method on Phased Array Radars
From the theoretical analysis above, the proposed cross-correlation algorithm can be used to estimate a target’s elevation angle and azimuth angle.
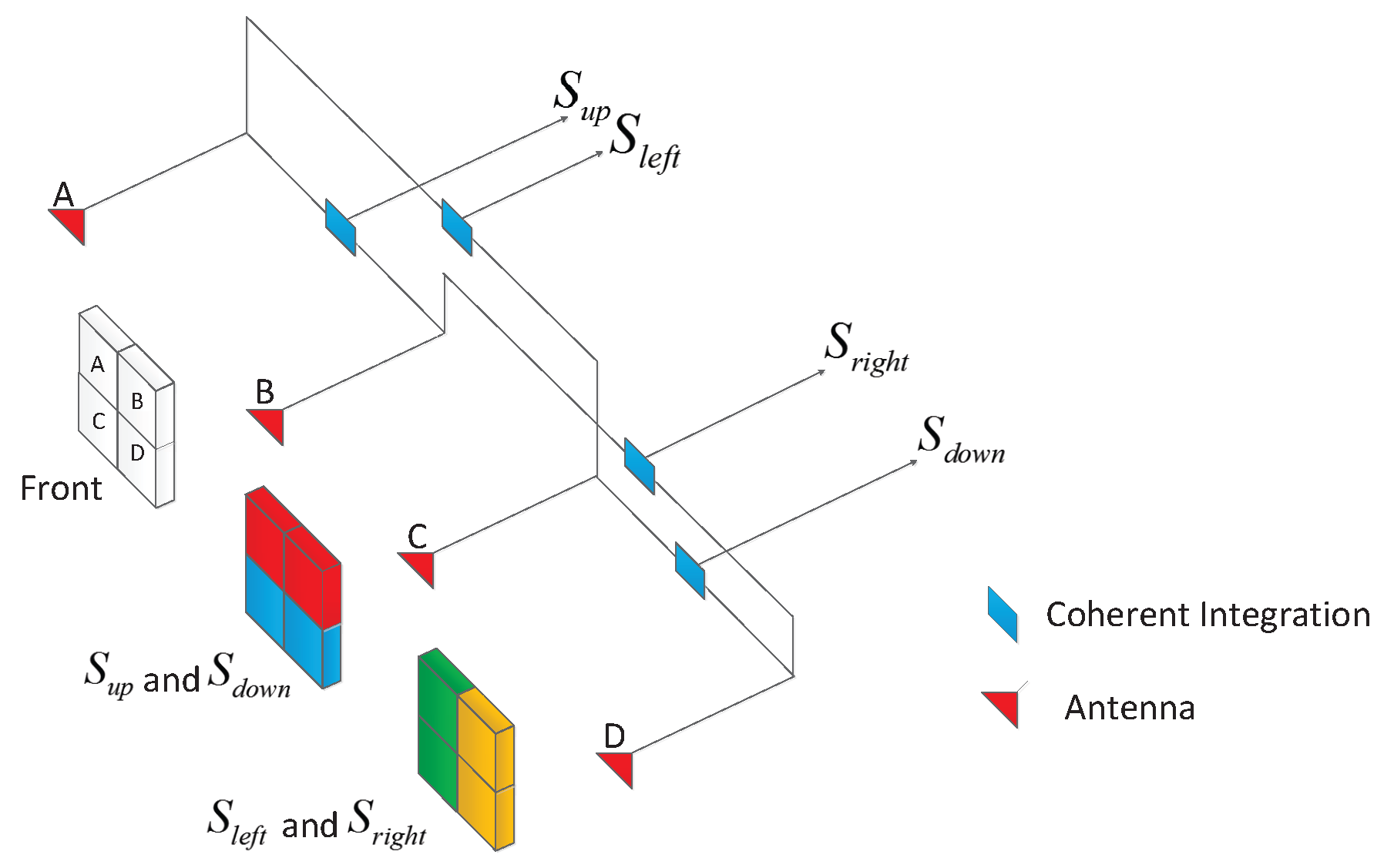
First, in phased array radars, the LFM echo signals are received, respectively, by four quadrants, which can be regarded as four identical antenna elements. These four signals will be coherently integrated to form four gain region signals (
i.e.,
,
,
,
). It should be noted that the gain region can be formed via beamforming, thus the proposed method can also be applied in radar systems using beamforming. The coherent integration operation for angle estimation is shown in
Figure 4.
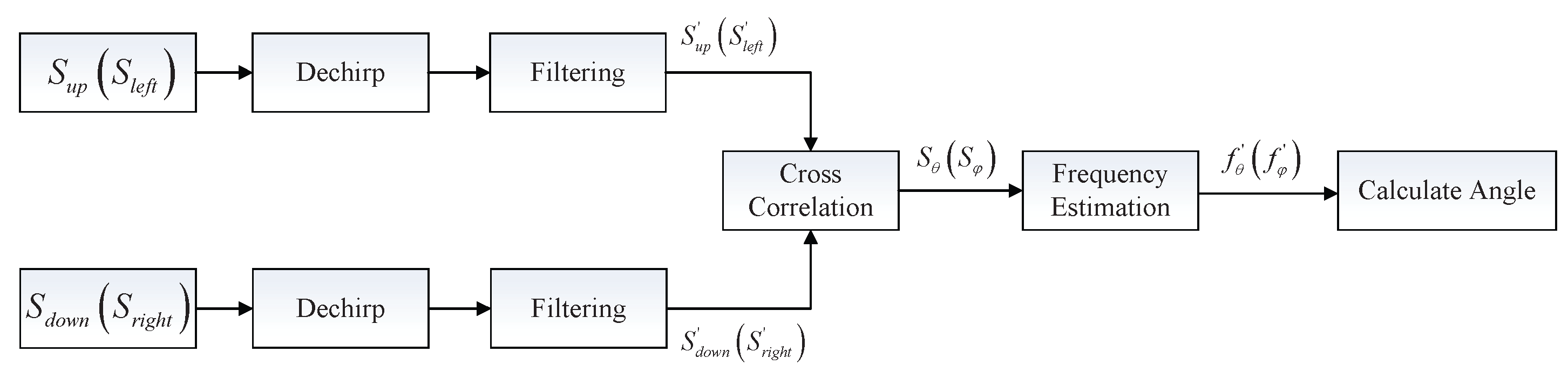
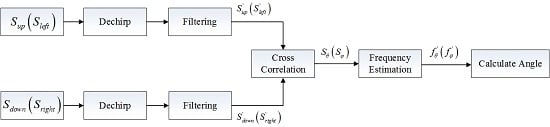
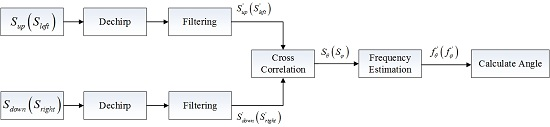
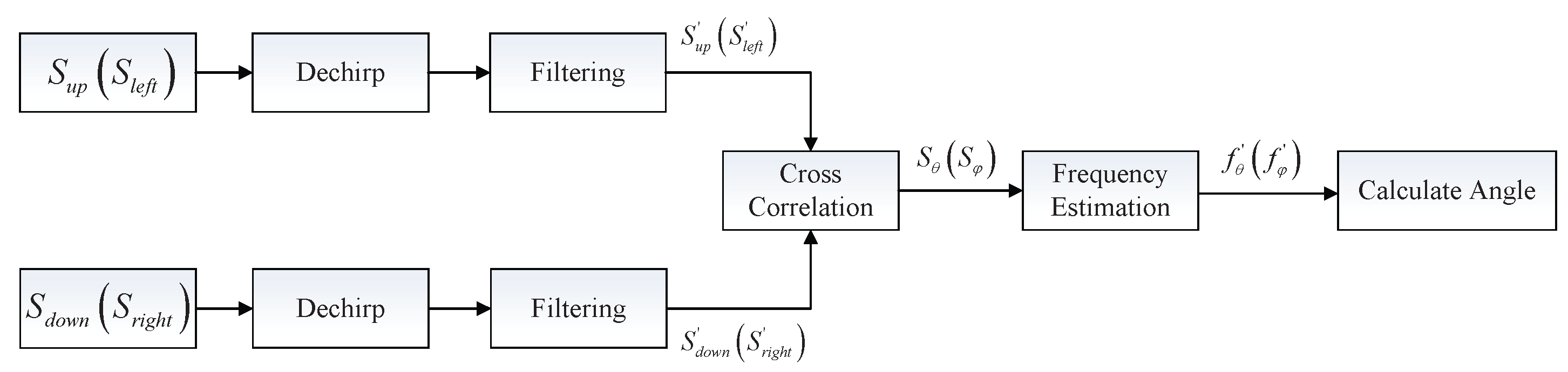
Figure 5 shows the structure of the proposed monopulse angle estimation. Dechirp and filtering are generally applied to each signal. After dechirp and filtering, the sampling frequency of echo signals will decrease, and we can get four signals (
i.e.,
,
,
,
).
Then, we perform cross-correlation operation as Equation (
5), and two cross-correlation functions are obtained.
is for the elevation angle and
is for the azimuth angle.
Finally, frequency estimation methods, for example, FFT and Newton iteration [
16,
17], can be utilized to estimate the peak spectrum positions of
and
.
Suppose that the frequencies of the peak spectrum position are
and
, respectively. The estimated elevation angle and azimuth angle can then be calculated as follows:
6. Simulation Results
In this section, we conduct the elevation angle estimation through simulations to verify the effectiveness of the proposed approach. The estimation of azimuth angle is similar and omitted here. The detail setting of the simulation is shown as follows. The wideband radar transmits chirp signals with bandwidth GHz. The center frequency is GHz and the pulse duration is s. Suppose there is a far-field target containing 17 scatterers and the length of the target is about 13 m, and the target range is 10,000 m. The spacing between two gain regions is 2 m. In the process of signal processing, after dechirp and filtering, the sampling frequency of echo signals will decrease to 10 MHz. We utilize the Newton iteration to estimate the peak spectrum position. All results were conducted with 1000 Monte Carlo simulations.
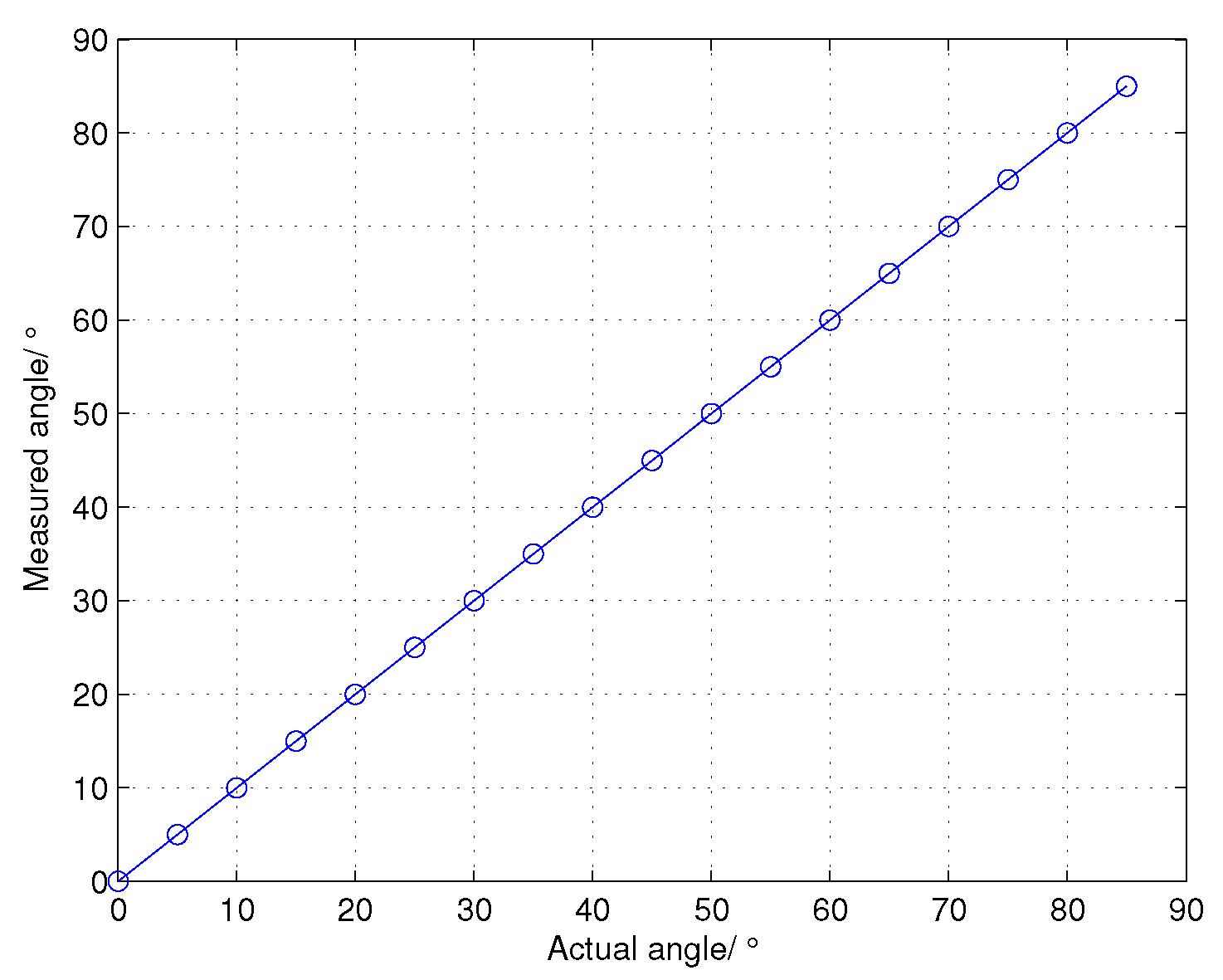
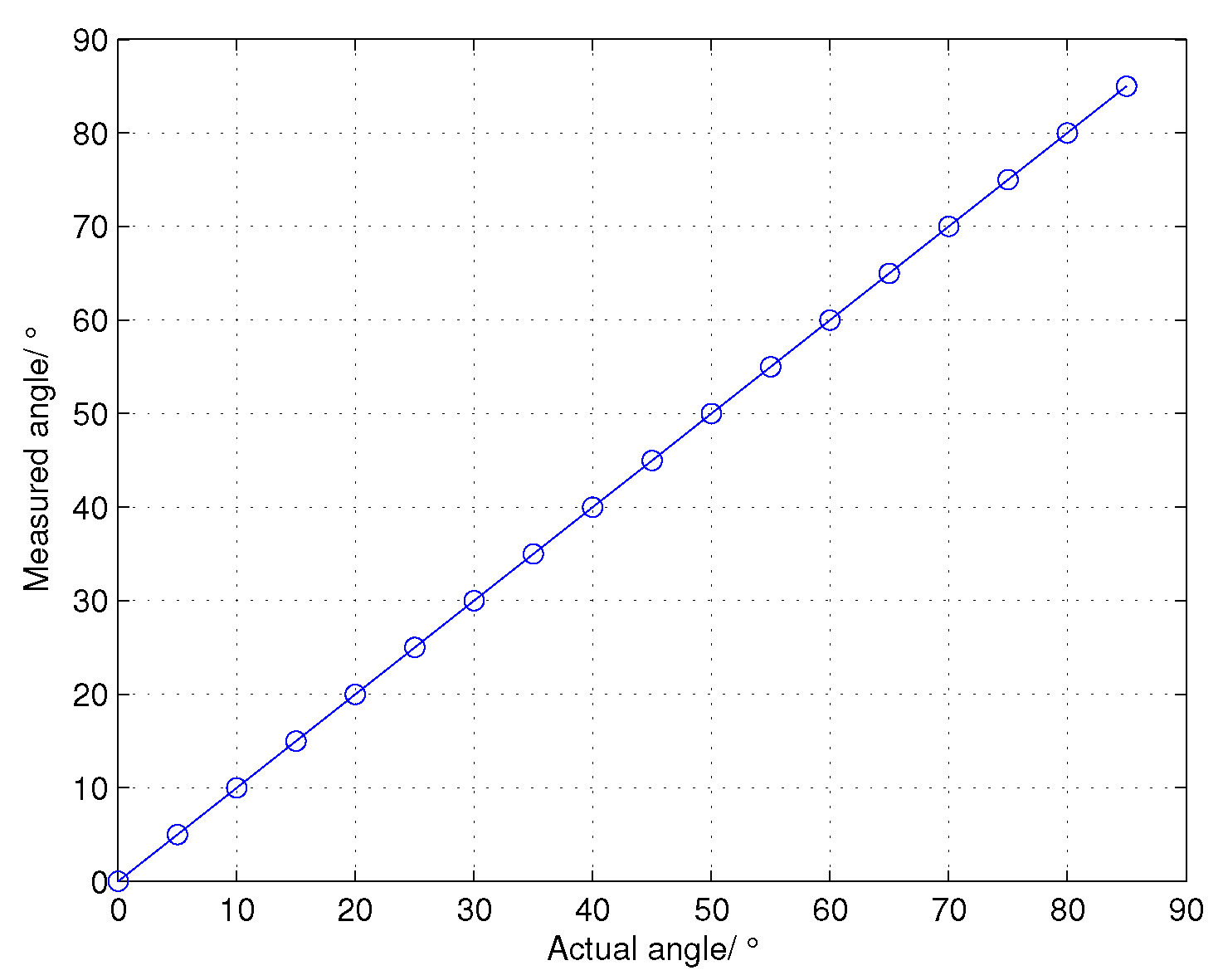
The performances of the proposed cross-correlation angle estimation (CCAE) in different target angles are shown in
Figure 7. The actual elevation angle of the target is supposed to vary from
to
in steps of
, and the SNR of the input dechirped signal is 10 dB. We can see that there is no angle ambiguity for the CCAE. Thus, the estimated angle range in wideband radars can be significantly extended.
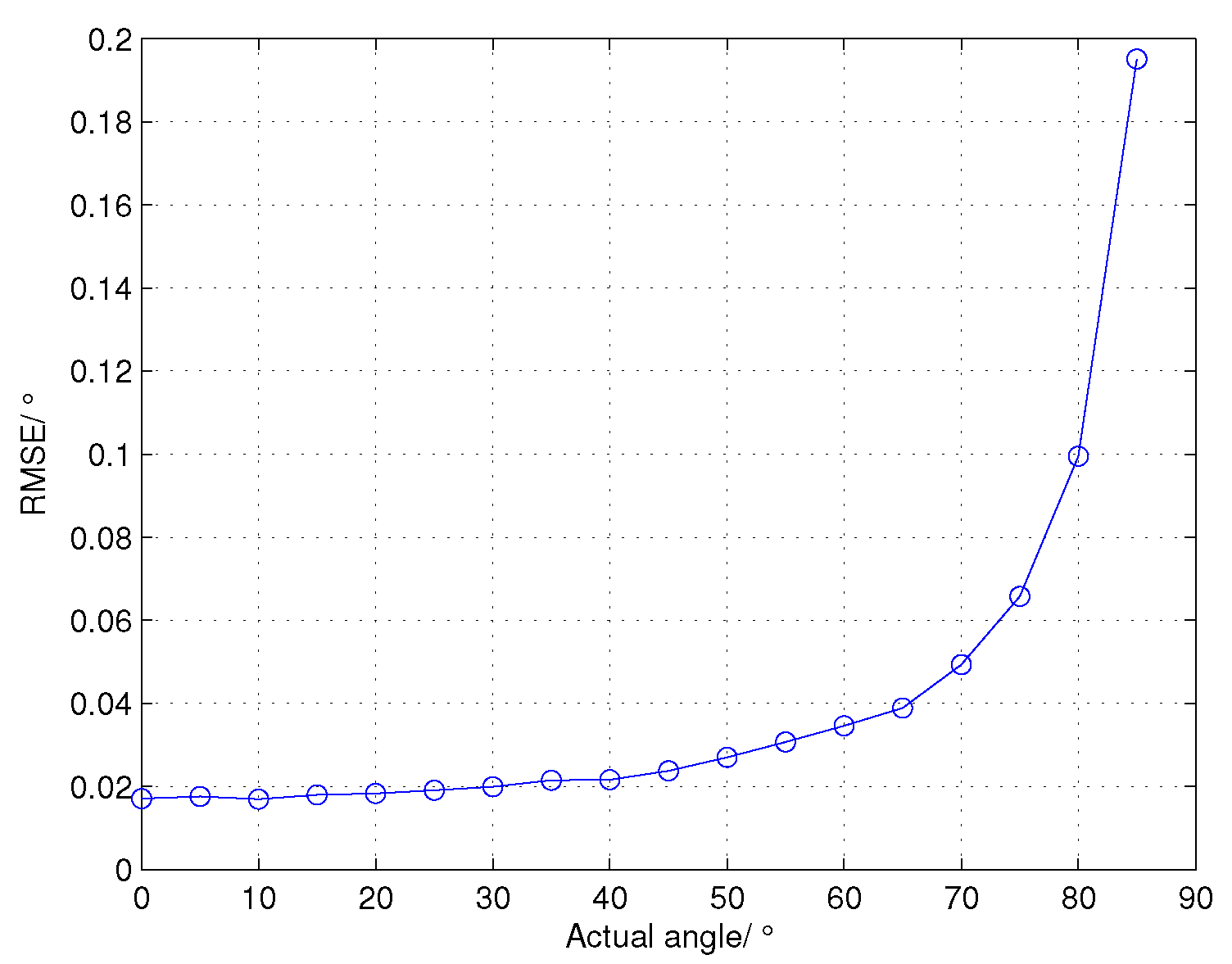
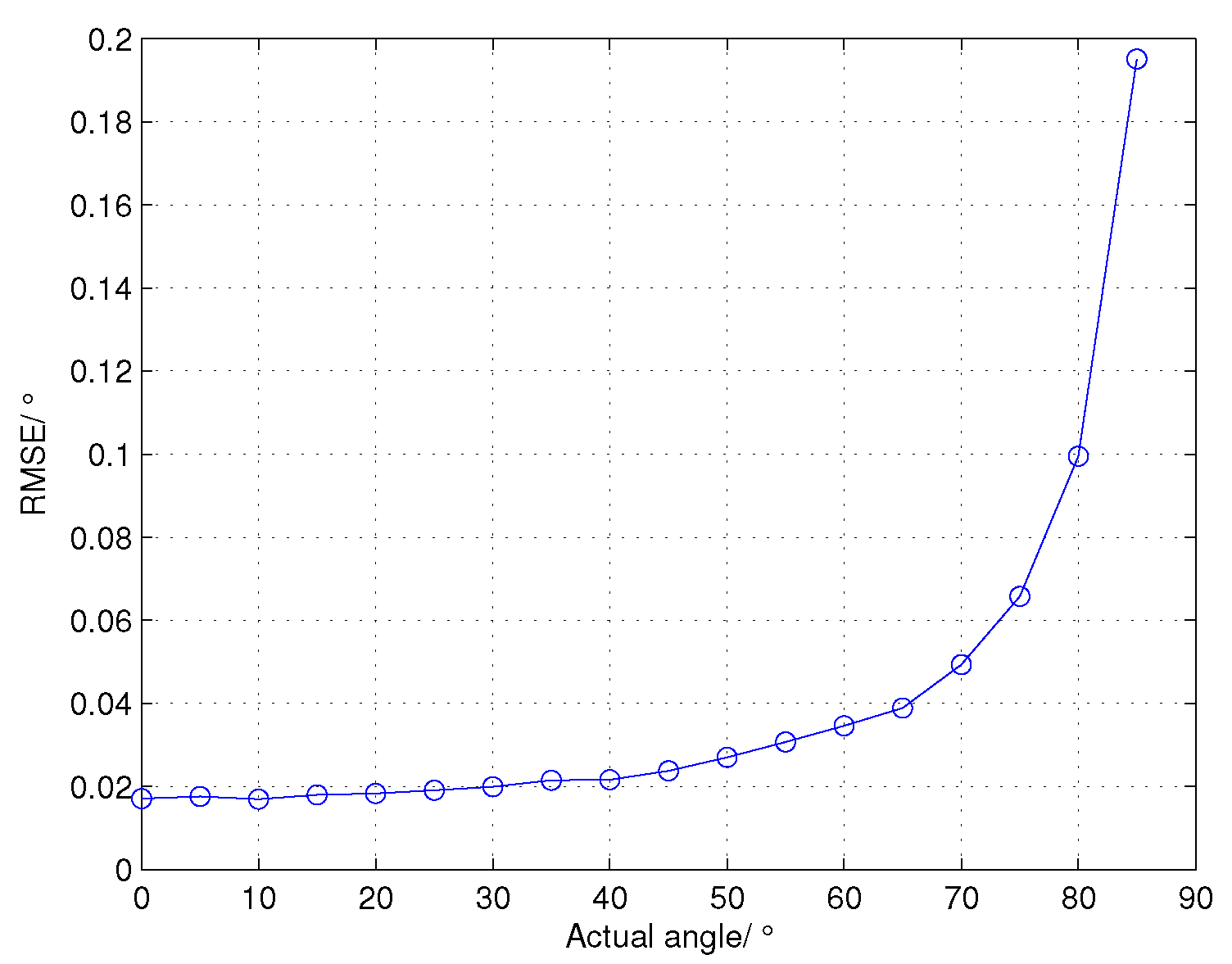
Figure 8 shows the RMSE of CCAE in different target angles. With the increase of the target angle, the RMSE also grows gradually. This result can be explained by Equation (
17) and is consistent with the theoretical analysis at the end of
Section 3. Even though the RMSE grows when the target angle increases, the errors are still within the acceptable range.
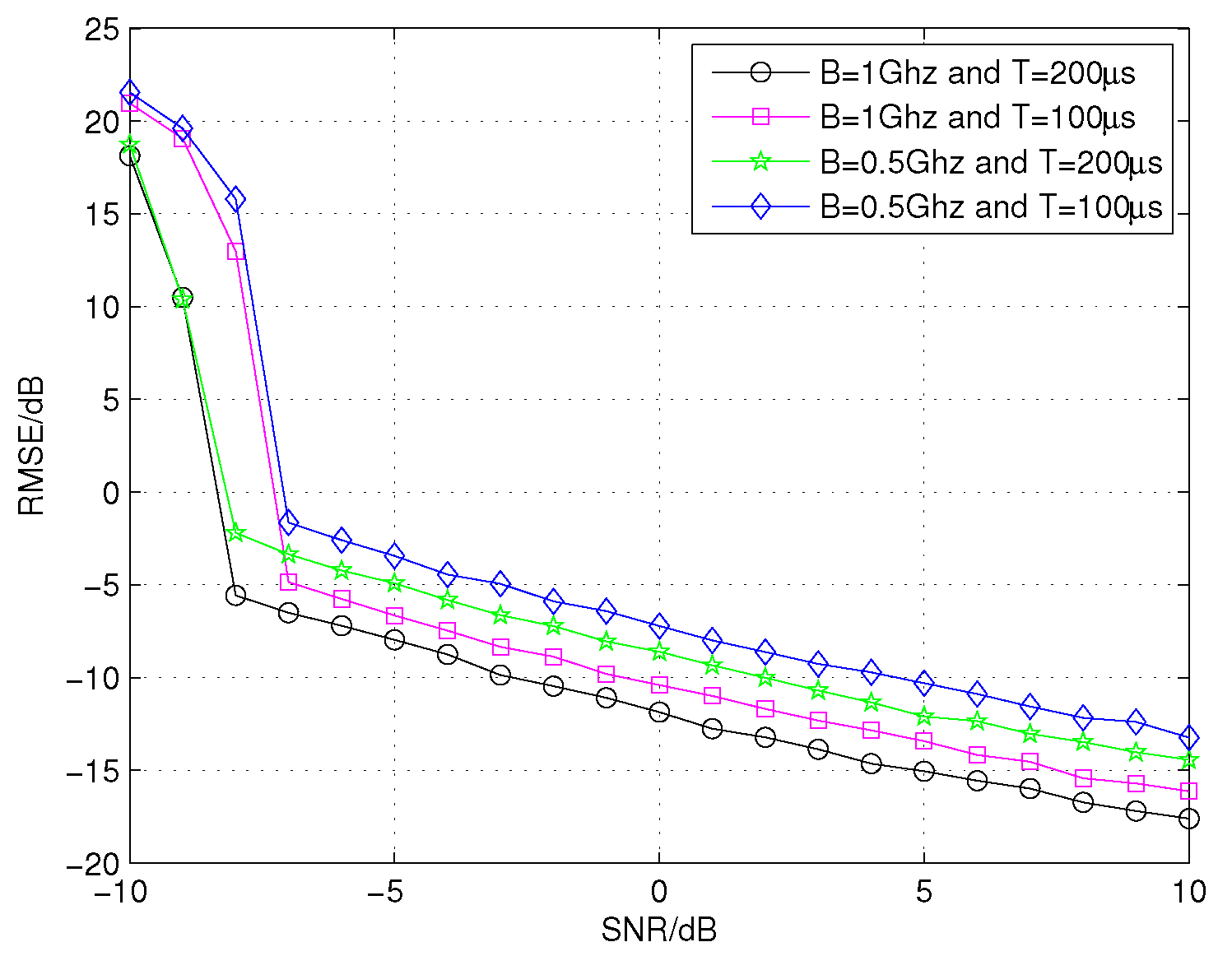
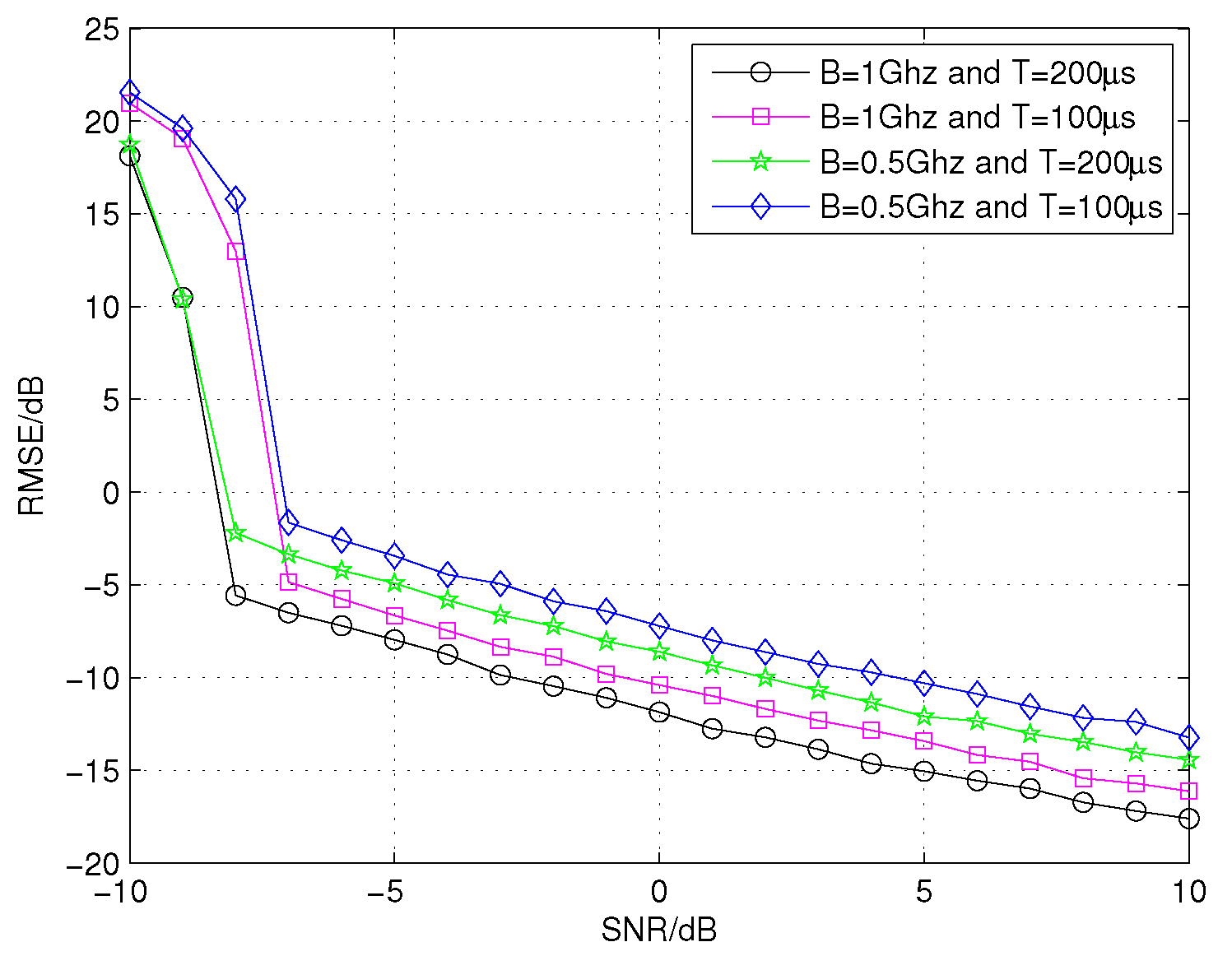
We now compare the performances of the proposed CCAE with different bandwidths and pulse durations in different SNR conditions. Assume that the elevation angle of the above 17 scatterers target is
, and the SNR varies from
dB to 10 dB in steps of 1 dB. As shown in
Figure 9, to achieve the same value of RMSE, the SNR needed by the CCAE with
GHz and
s is the lowest and its performance is the best. When the SNR is the same, the difference of the RMSE between the case with
GHz and
s and the case with
GHz and
s is about 3 dB, which is similar to the theoretical value
dB; the difference of the RMSE between the case with
GHz and
s and the case with
GHz and
s is about
dB, which is similar to the theoretical value
dB. These results are consistent with the theoretical analysis and verify the effectiveness of the approximated RMSE, that is, Equation (
25).
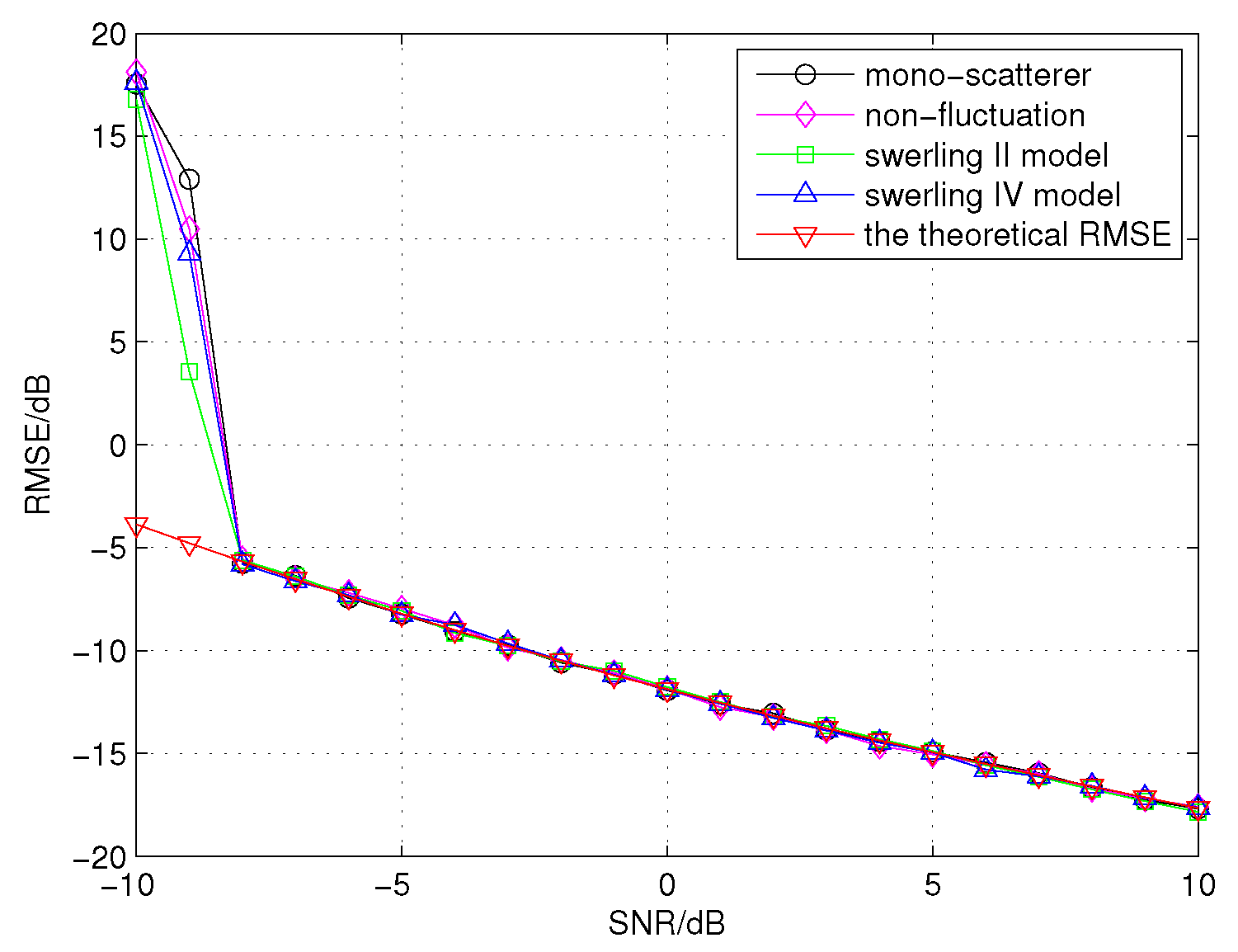
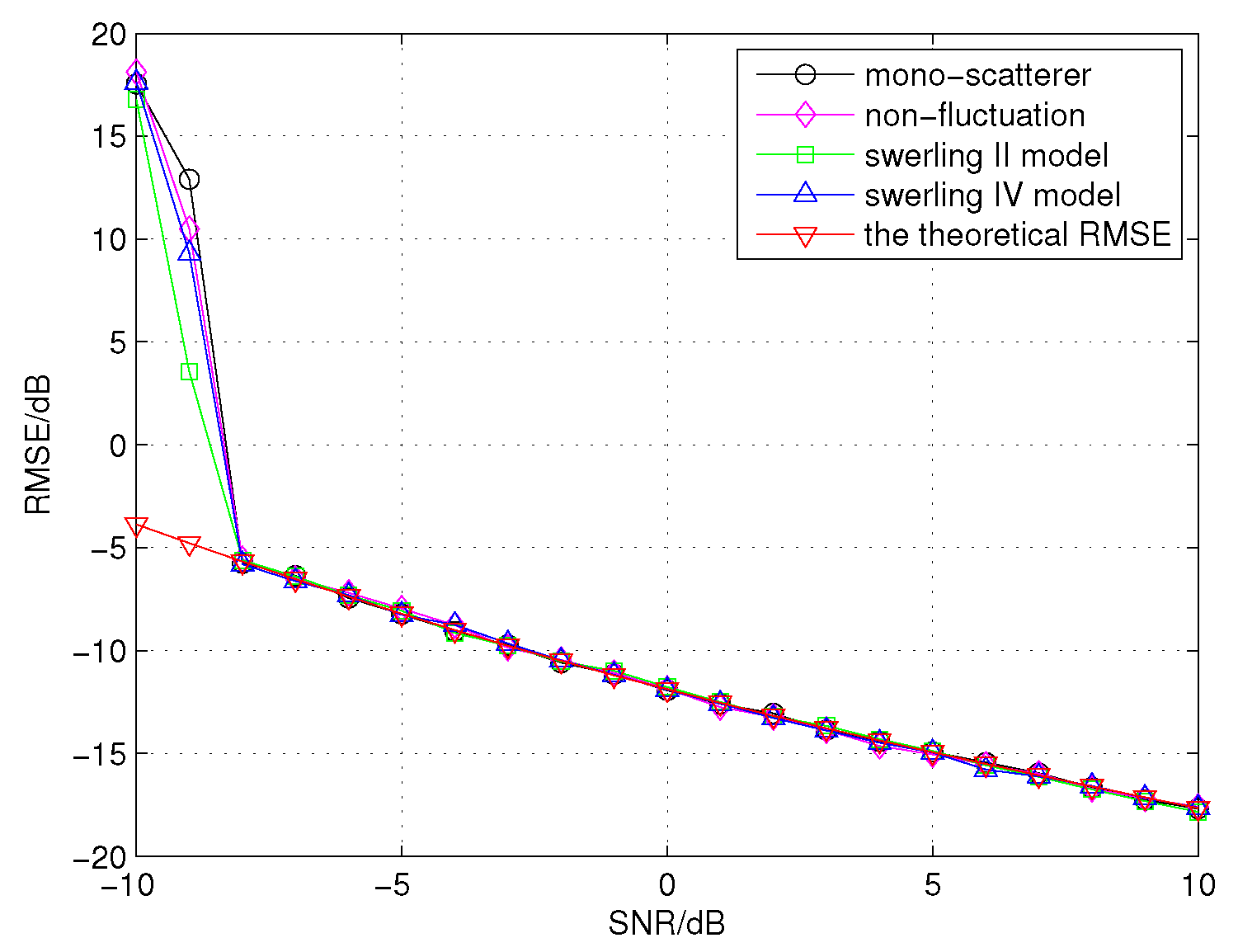
In the following, we evaluate the performances of the proposed algorithm for different types of targets. Four targets are considered, namely mono-scatterer target, non-fluctuation target containing 17 scatterers, Swerling II target containing 17 scatterers and Swerling IV target containing 17 scatterers. In this simulation, assume that the target elevation angle is
, and the SNR varies from
dB to 10 dB in steps of 1 dB. The total signal power of each echo signal for different types of targets is normalized to 1. From
Figure 10, the threshold SNR and the RMSE of the three targets containing 17 scatterers are nearly the same. Since the CCAE is a monopulse angle estimation method, the simulation of the Swerling I target is equivalent to the Swerling II target, and the simulation of the Swerling III target is equivalent to the Swerling IV target, which are omitted here. These results indicate that the CCAE is not sensitive to the types of targets. Moreover,
Figure 10 also shows that the performance of the mono-scatterer target is almost the same as those of the targets containing 17 scatterers, which means that the proposed method can accumulate the energy of the received echo signals from different scatterers of a target.
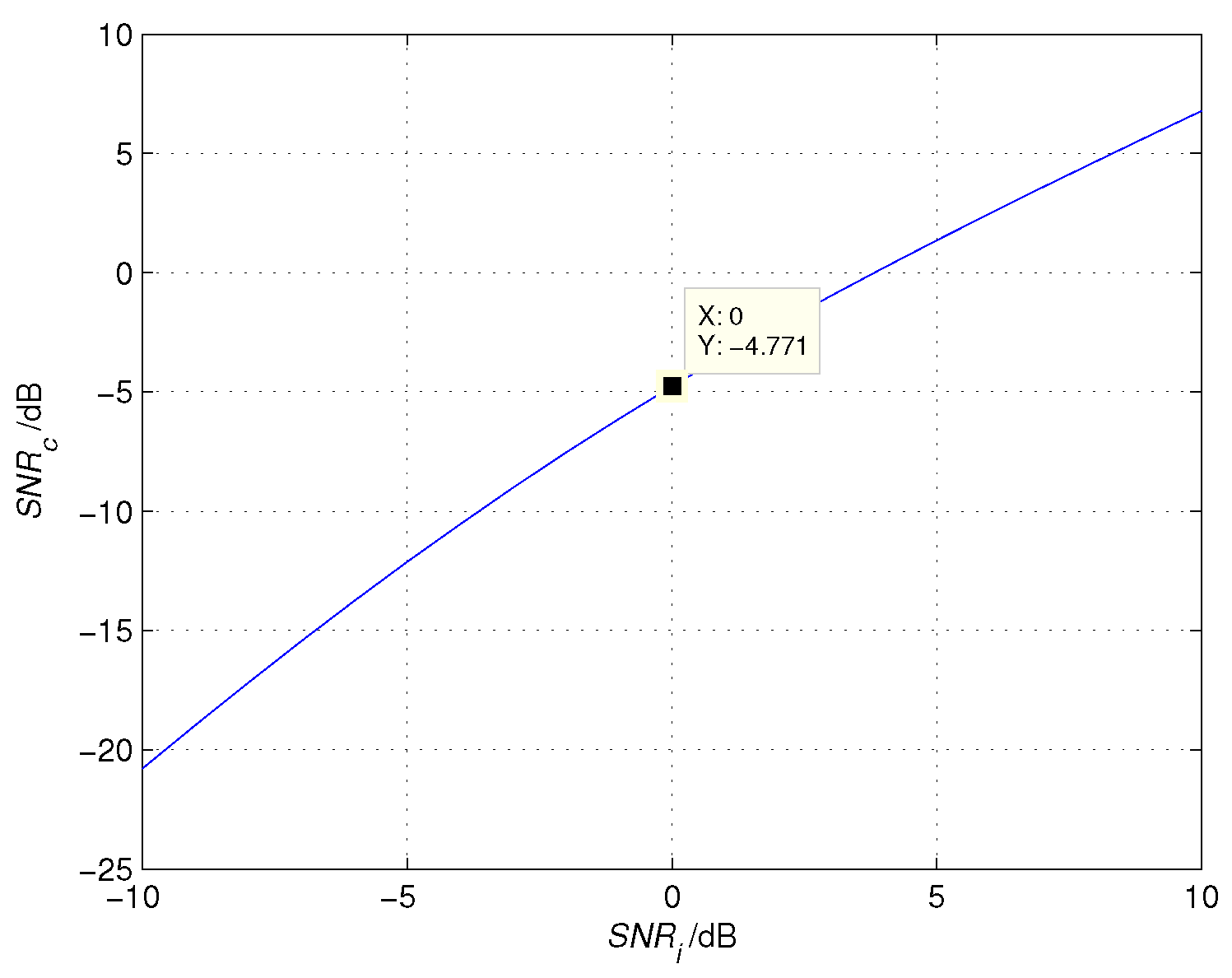
Figure 10 shows that the RMSE of the simulation result and the theoretical RMSE result are close. Furthermore, the threshold SNR of the simulation result (approximated
dB) and the theoretical threshold SNR calculated by Equations (
22) and (
23) (approximated
dB) are also close. The difference between the theoretical threshold SNR and the simulation result is only about
dB.
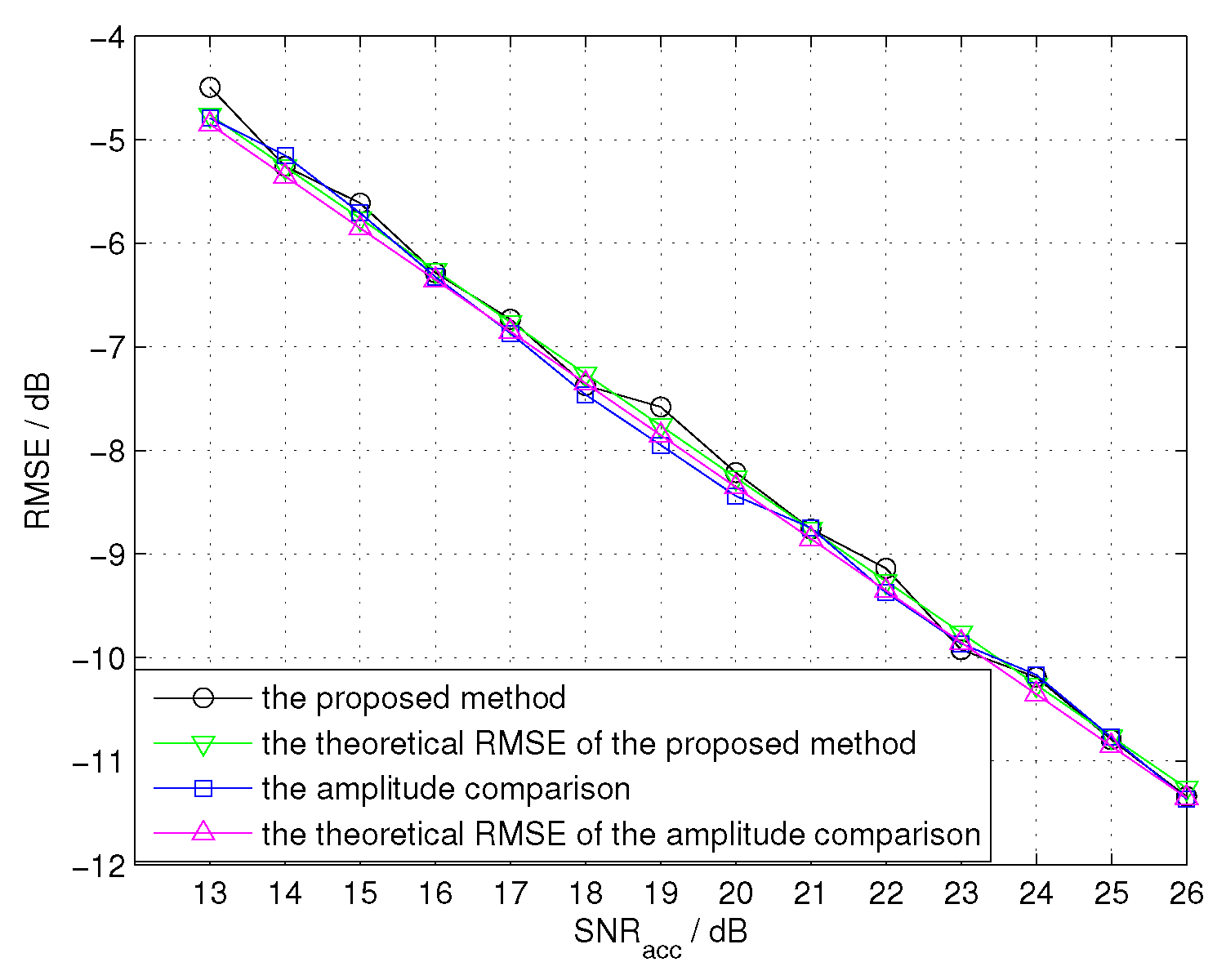
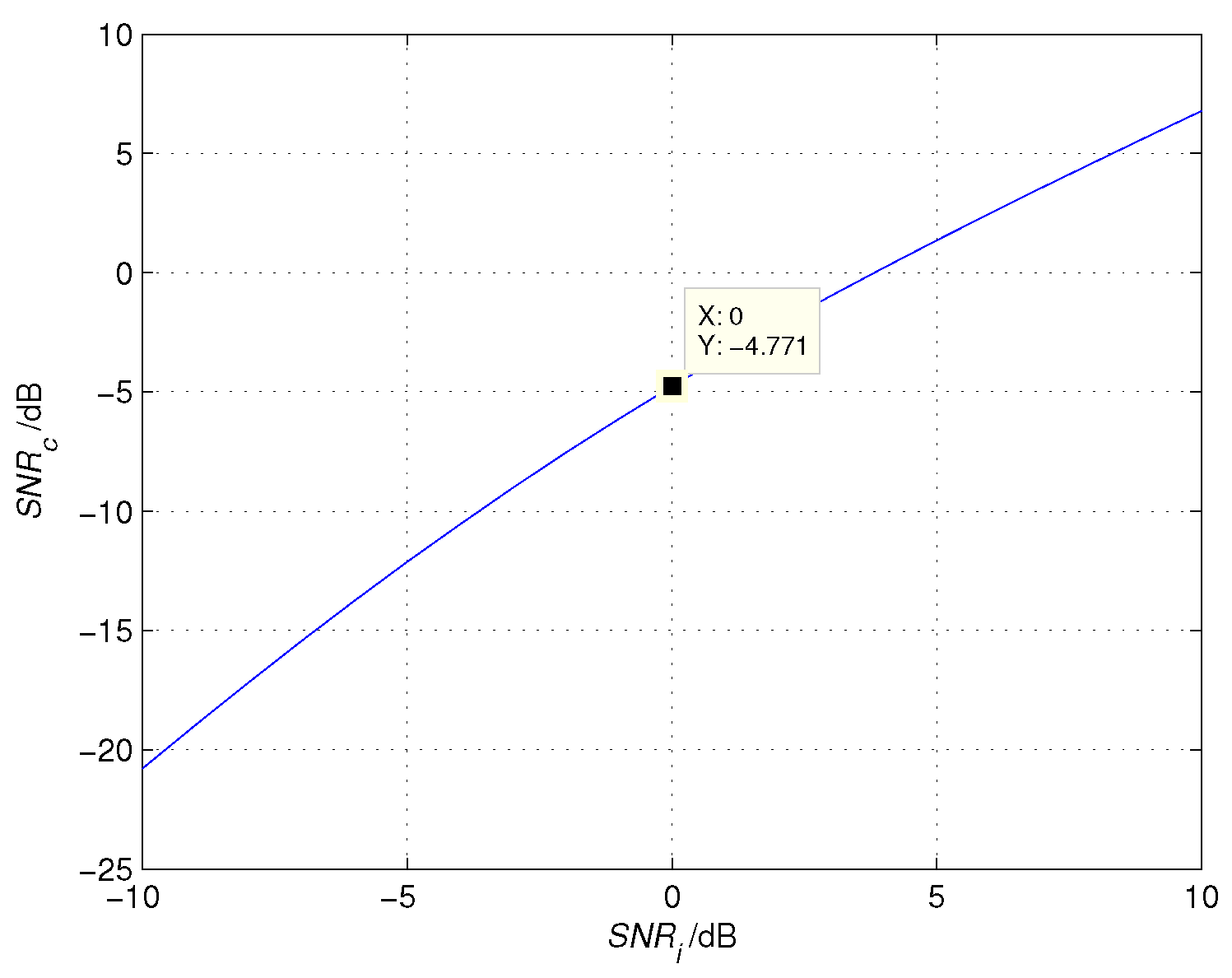
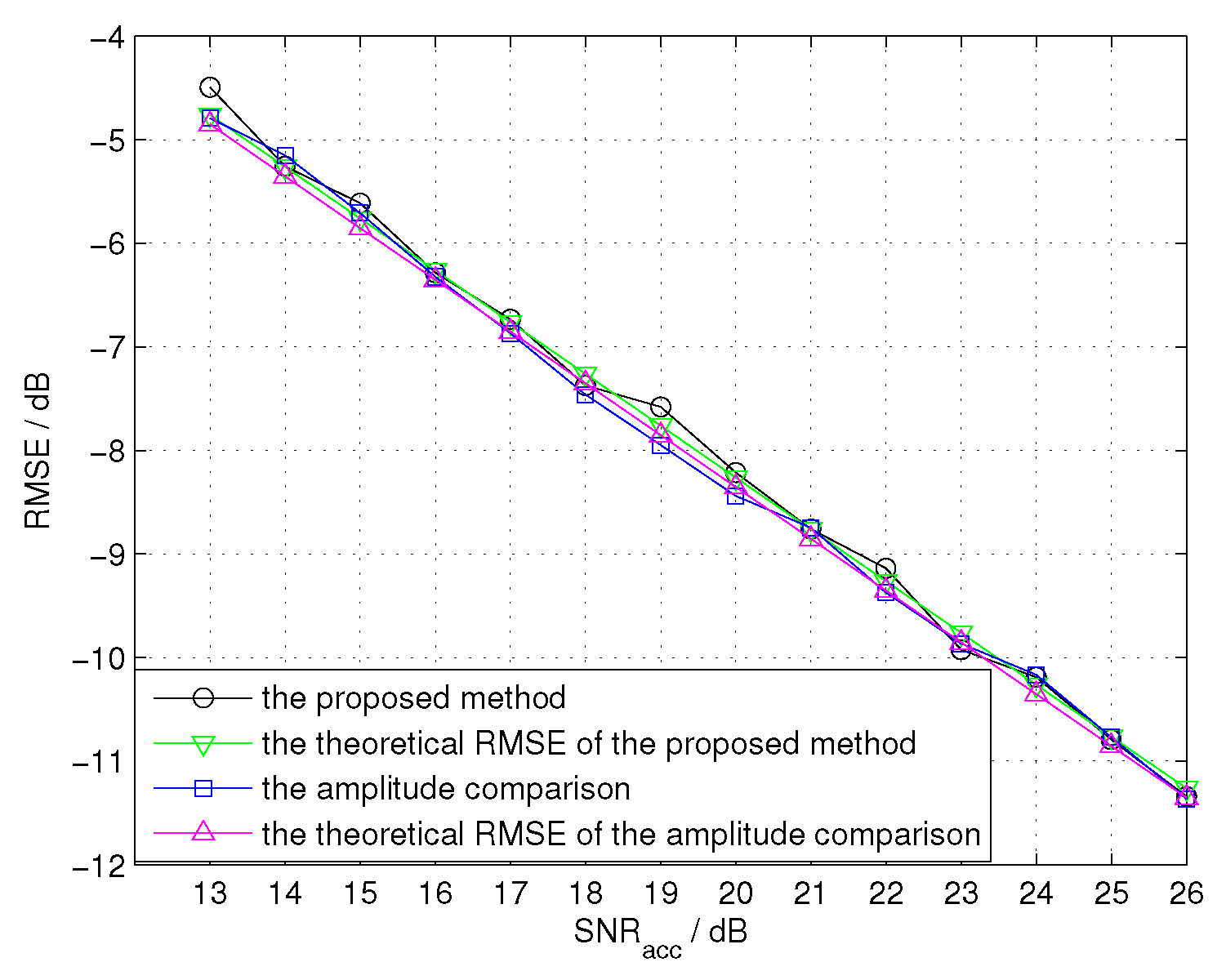
Finally, we compare the performances of the proposed CCAE with that of the amplitude comparison angle estimation (ACAE) in different SNR conditions. We evaluate the ACAE in narrowband condition, that is, the bandwidth is 10 MHz, the sampling frequency is 10 MHz, and other parameters remain the same. Since the parameters in narrowband conditions are different from those in wideband condition, we compare the performances of two methods in the same accumulated SNR, which is represented by
. As 13 dB is the threshold SNR of signal detection, we take it as a starting point, and the accumulated SNR is supposed to vary from 13 dB to 26 dB in the steps of 1 dB. Then, Equation (
25) should be changed as
, where
. The theoretical RMSE of ACAE is obtained by
[
22], where
is 3 dB of the beam width, and
is the normalized monopulse slope. In this simulation,
is equal to
, and
is equal to
. From
Figure 11, we find that the performances of two methods are similar, which verify the feasibility of CCAE. Furthermore, according to Equation (
25), the performance of the proposed method depends on three parameters including the chirp rate, the spacing between two gain regions and the sampling number. The larger the chirp rate, the larger the spacing between the two gain regions, or the higher the sampling number, the better performance the proposed method can achieve. Therefore, the performance of the proposed method will be better than the ACAE method, when the chirp rate or the spacing of two gain regions is relatively large.
Due to the high range resolution of wideband signals, the target may occupy multiple range cells. As we know, ACAE is about estimating the angle of the strongest scatterer in the main lobe of the antenna. When using ACAE for wideband signals, the angle estimation should only be based on one of the dominant scatterers of the target. This will lead to the loss of SNR. Moreover, if there is no dominant scatterer in the HRRP, the ACAE may not work correctly. Note that the angle estimation for wideband radars is investigated little in previous works. In modern radar systems, narrowband signals are usually used for angle estimation and object tracking, while wideband signals are used for imaging. Therefore, narrowband signals and wideband signals should be transmitted alternatively. When adopting the proposed CCAE, future radars may only need wideband signals for both tracking and imaging, which can greatly increase the data rate and strengthen the capability of anti-jamming.
7. Conclusions
In this paper, we investigate monopulse angle estimation for wideband LFM signals. Due to the high range resolution of wideband signals, the target may occupy multiple range cells. If the traditional monopulse angle estimations are used for wideband signals, only the dominant scatterer of the target can be used to estimate the direction of arrivals. This means that the energy scattering from the target cannot be accumulated and may lead to the loss of SNR. Moreover, if there is no dominant scatterer in the HRRP, the traditional monopulse angle estimations may not work correctly. To solve these problems, we propose a novel monopulse angle estimation algorithm based on cross-correlation operation. In the proposed algorithm, the received echo signals are processed by a cross-correlation operation, thus the energy from different scatterers of a target can be accumulated. The proposed scheme can therefore work well in low SNR conditions. In the proposed algorithm, the angle estimation problem is converted to estimating the frequency of the CCF. The simulation results demonstrate the similar performance of the proposed algorithm compared with the amplitude comparison angle estimation. It means that the proposed method for angle estimation can be adopted. In modern radar systems, narrowband signals and wideband signals should be transmitted alternatively. However, when adopting the proposed method, future radars may only need wideband signals for both tracking and imaging, which can greatly increase the data rate and strengthen the capability of anti-jamming. More importantly, the estimated angle will not become ambiguous under an arbitrary angle, which can significantly extend the estimated angle range in wideband radars.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}