
Nonlinear-Based MEMS Sensors and Active Switches for Gas Detection

Abstract
:1. Introduction
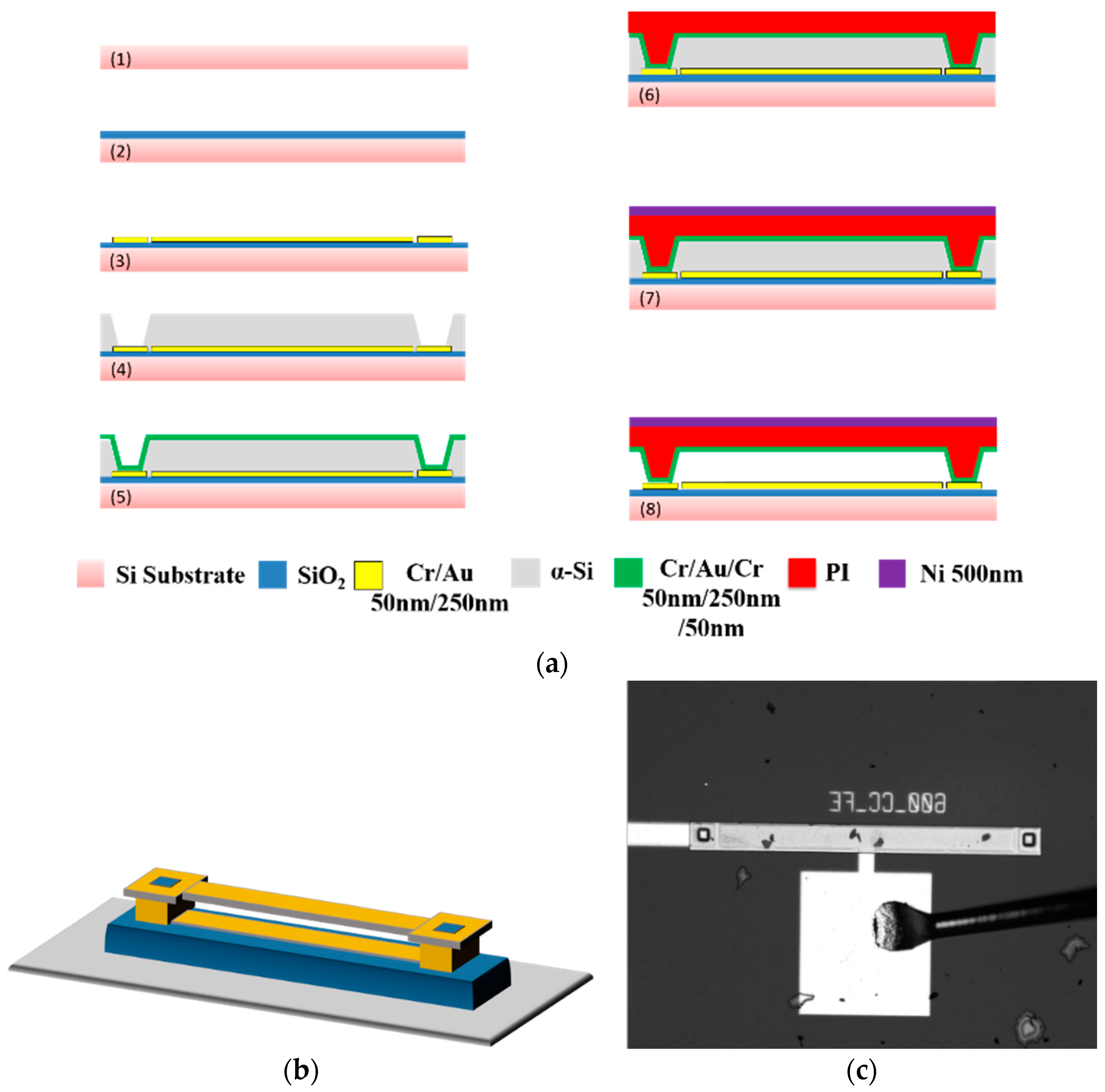
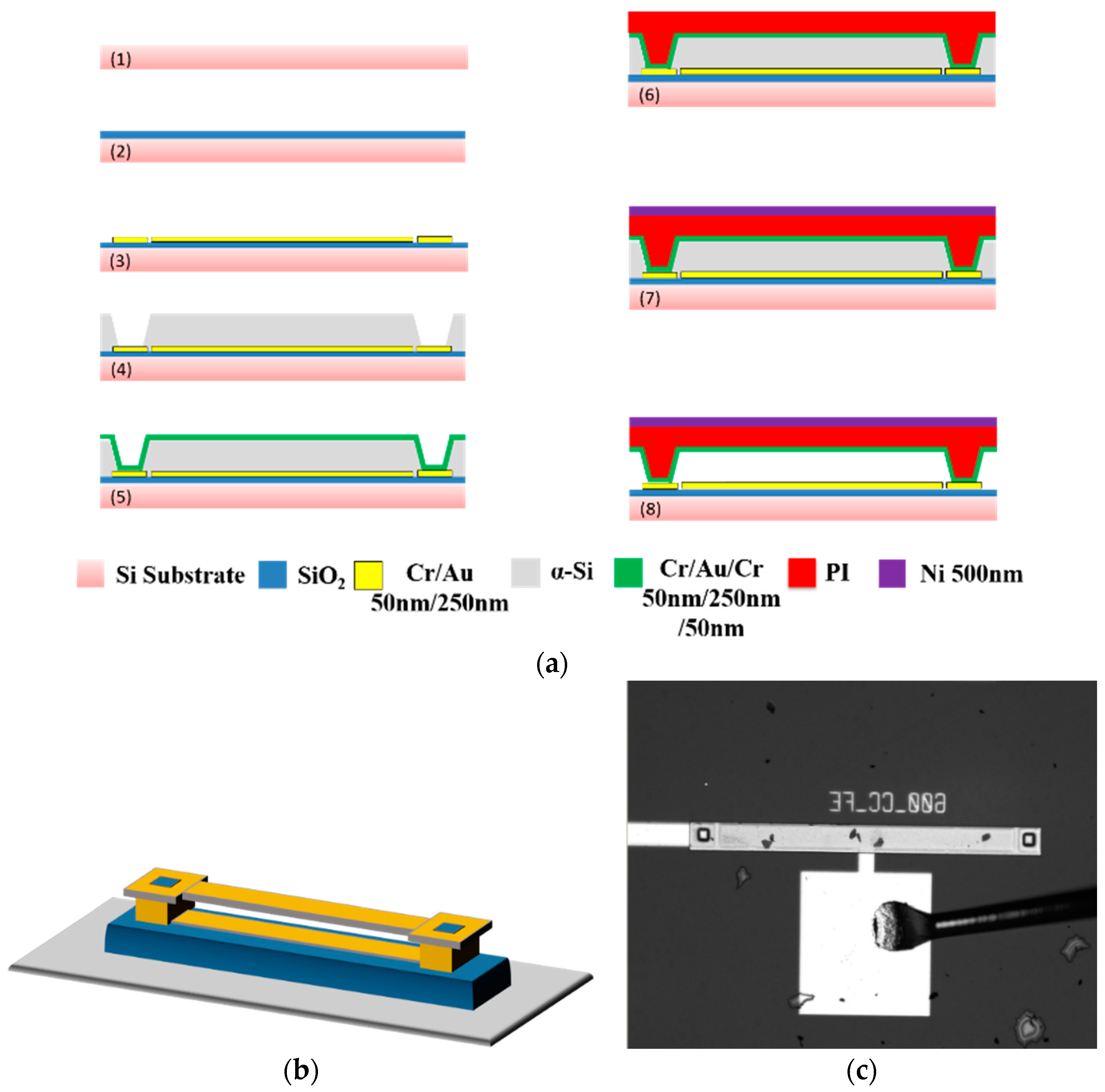
2. Fabrication Process
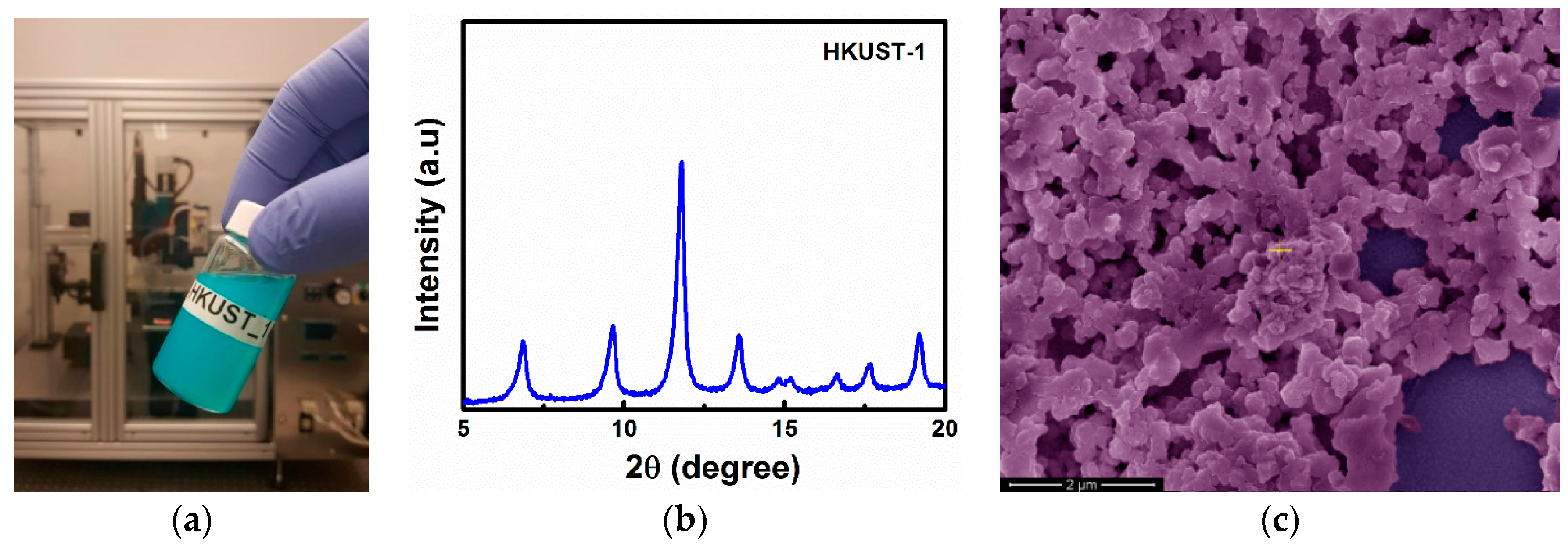
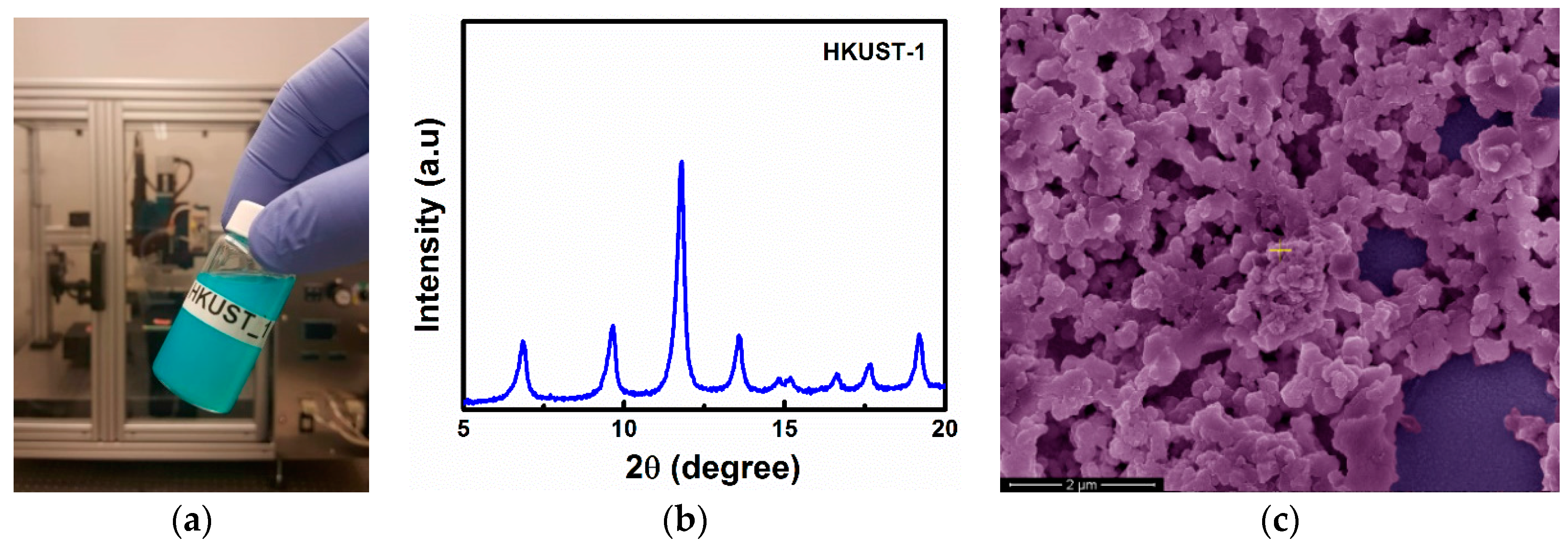
3. MOF and Inkjet Printing
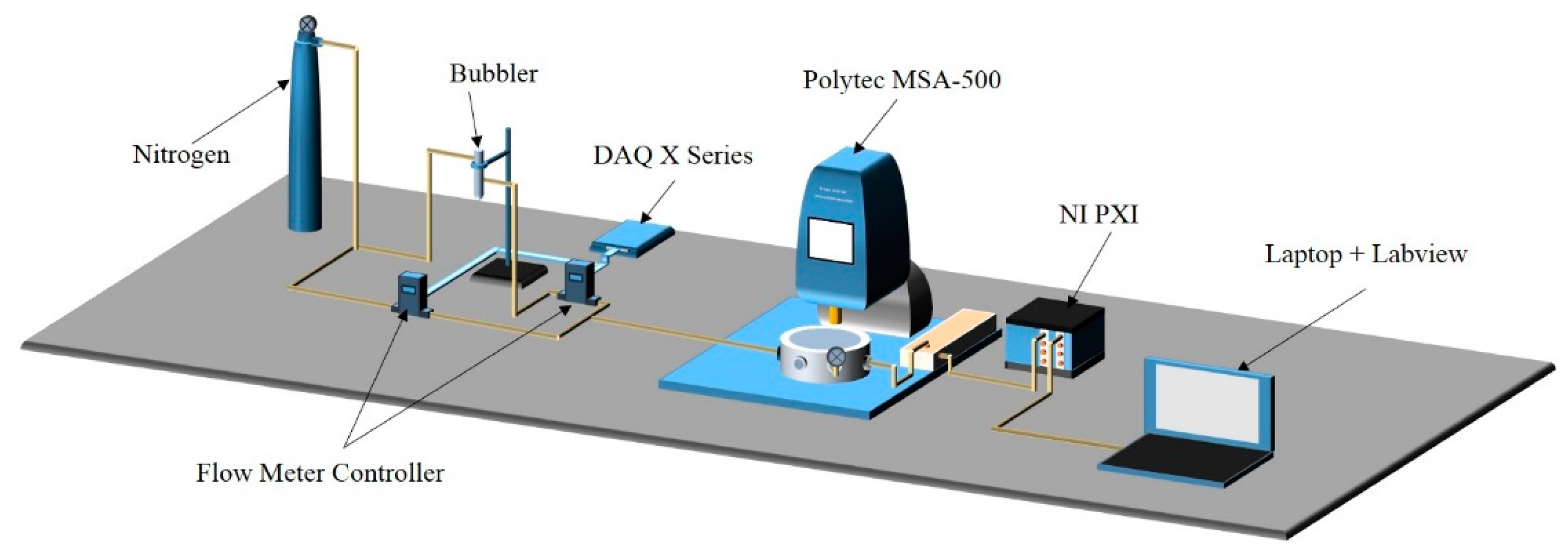
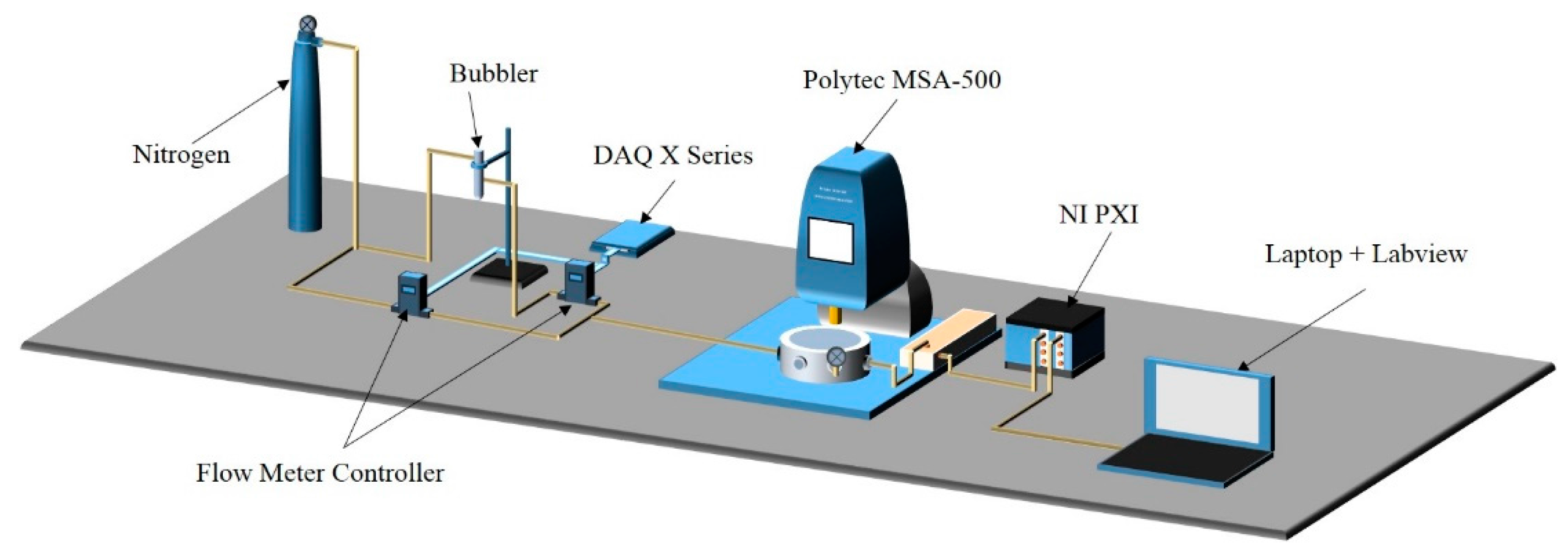
4. Gas Sensing Setup
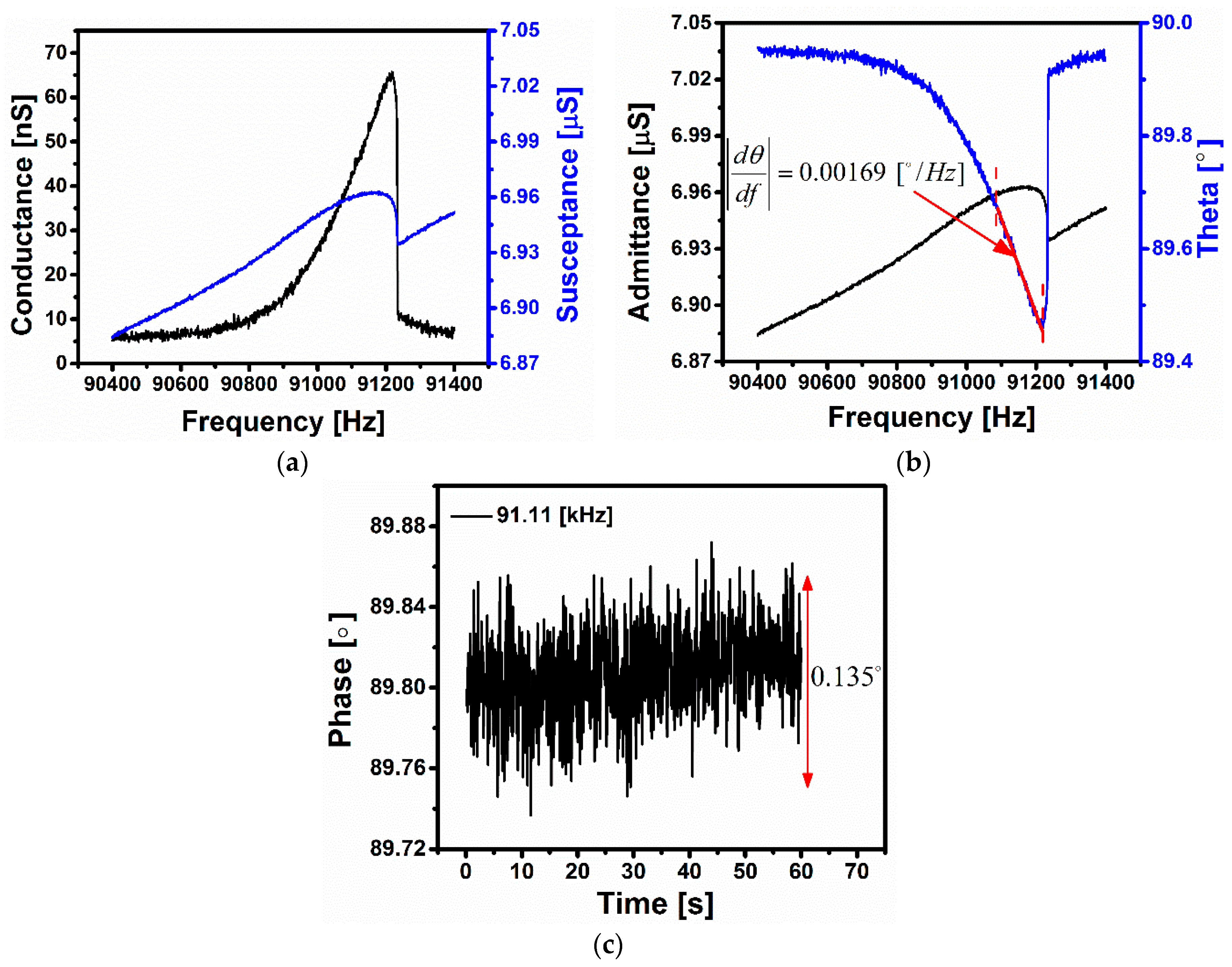
5. Sensor Characterization
6. Results
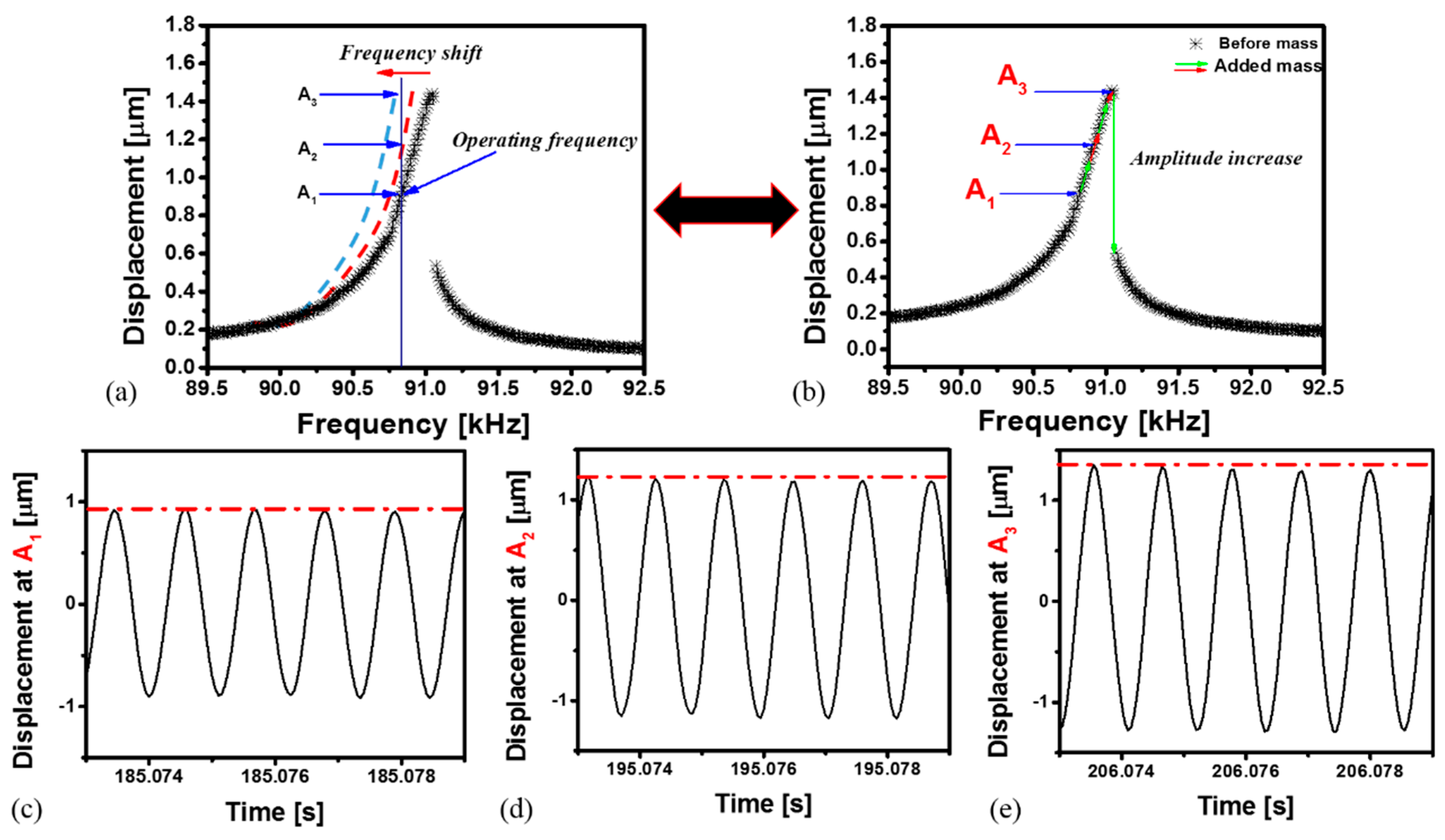
6.1. Jump-Up Switch Triggered by Gas
6.2. Jump-Down Sensor and Switch
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Thundat, T.; Wachter, E.; Sharp, S.; Warmack, R. Detection of mercury vapor using resonating microcantilevers. Appl. Phys. Lett. 1995, 66, 1695–1697. [Google Scholar] [CrossRef]
- Younis, M.I. MEMS Linear and Nonlinear Statics and Dynamics; Springer: New York, NY, USA, 2001. [Google Scholar]
- Lang, H.; Berger, R.; Battiston, F.; Ramseyer, J.-P.; Meyer, E.; Andreoli, C.; Brugger, J.; Vettiger, P.; Despont, M.; Mezzacasa, T. A chemical sensor based on a micromechanical cantilever array for the identification of gases and vapors. Appl. Phys. A Mater. Sci. Process. 1998, 66, S61–S64. [Google Scholar] [CrossRef]
- Boisen, A.; Thaysen, J.; Jensenius, H.; Hansen, O. Environmental sensors based on micromachined cantilevers with integrated read-out. Ultramicroscopy 2000, 82, 11–16. [Google Scholar] [CrossRef]
- Senesac, L.; Thundat, T.G. Nanosensors for trace explosive detection. Mater. Today 2008, 11, 28–36. [Google Scholar] [CrossRef]
- Su, M.; Li, S.; Dravid, V.P. Microcantilever resonance-based DNA detection with nanoparticle probes. Appl. Phys. Lett. 2003, 82, 3562–3564. [Google Scholar] [CrossRef]
- Teva, J.; Abadal, G.; Torres, F.; Verd, J.; Perez-Murano, F.; Barniol, N. A femtogram resolution mass sensor platform based on SOI electrostatically driven resonant cantilever. Part II: Sensor calibration and glycerine evaporation rate measurement. Ultramicroscopy 2006, 106, 808–814. [Google Scholar] [CrossRef] [PubMed]
- Teva, J.; Abadal, G.; Torres, F.; Verd, J.; Perez-Murano, F.; Barniol, N. A femtogram resolution mass sensor platform, based on SOI electrostatically driven resonant cantilever. Part I: Electromechanical model and parameter extraction. Ultramicroscopy 2006, 106, 800–807. [Google Scholar] [CrossRef] [PubMed]
- Gupta, A.; Akin, D.; Bashir, R. Single virus particle mass detection using microresonators with nanoscale thickness. Appl. Phys. Lett. 2004, 84, 1976–1978. [Google Scholar] [CrossRef]
- Wu, G.; Datar, R.H.; Hansen, K.M.; Thundat, T.; Cote, R.J.; Majumdar, A. Bioassay of prostate-specific antigen (PSA) using microcantilevers. Nat. Biotechnol. 2001, 19, 856–860. [Google Scholar] [CrossRef] [PubMed]
- Bouchaala, A.; Nayfeh, A.H.; Younis, M.I. Frequency shifts of micro and nano cantilever beam resonators due to added mass. J. Dyn. Syst. Meas. Control 2016. [Google Scholar] [CrossRef]
- Schmid, S.; Dohn, S.; Boisen, A. Real-time particle mass spectrometry based on resonant micro strings. Sensors 2010, 10, 8092–8100. [Google Scholar] [CrossRef] [PubMed]
- Bouchaala, A.; Nayfeh, A.H.; Younis, M.I. Analytical Study of the Frequency Shifts of Micro and Nano Clamped-Clamped Beam Resonators due to an Added Mass. Meccanica 2016. [Google Scholar] [CrossRef]
- Burg, T.P.; Godin, M.; Knudsen, S.M.; Shen, W.; Carlson, G.; Foster, J.S.; Babcock, K.; Manalis, S.R. Weighing of biomolecules, single cells and single nanoparticles in fluid. Nature 2007, 446, 1066–1069. [Google Scholar] [CrossRef] [PubMed]
- Zampolli, S.; Elmi, I.; Mancarella, F.; Betti, P.; Dalcanale, E.; Cardinali, G.; Severi, M. Real-time monitoring of sub-ppb concentrations of aromatic volatiles with a MEMS-enabled miniaturized gas-chromatograph. Sens. Actuators B Chem. 2009, 141, 322–328. [Google Scholar] [CrossRef]
- Chen, G.; Thundat, T.; Wachter, E.; Warmack, R. Adsorption-induced surface stress and its effects on resonance frequency of microcantilevers. J. Appl. Phys. 1995, 77, 3618–3622. [Google Scholar] [CrossRef]
- Burg, T.P.; Mirza, A.R.; Milovic, N.; Tsau, C.H.; Popescu, G.A.; Foster, J.S.; Manalis, S.R. Vacuum-packaged suspended microchannel resonant mass sensor for biomolecular detection. J. Microelectromechan. Syst. 2006, 15, 1466–1476. [Google Scholar] [CrossRef]
- Fadel, L.; Dufour, I.; Lochon, F.; Francais, O. Signal-to-noise ratio of resonant microcantilever type chemical sensors as a function of resonant frequency and quality factor. Sens. Actuators B Chem. 2004, 102, 73–77. [Google Scholar] [CrossRef]
- Yang, Y.; Callegari, C.; Feng, X.; Ekinci, K.; Roukes, M. Zeptogram-scale nanomechanical mass sensing. Nano Lett. 2006, 6, 583–586. [Google Scholar] [CrossRef] [PubMed]
- Dai, M.D.; Eom, K.; Kim, C.-W. Nanomechanical mass detection using nonlinear oscillations. Appl. Phys. Lett. 2009, 95. [Google Scholar] [CrossRef]
- Rhoads, J.F.; Shaw, S.W.; Turner, K.L. Nonlinear dynamics and its applications in micro- and nanoresonators. J. Dyn. Syst. Meas. Control 2010, 132. [Google Scholar] [CrossRef]
- Younis, M.I.; Alsaleem, F. Exploration of new concepts for mass detection in electrostatically-actuated structures based on nonlinear phenomena. J. Comput. Nonlinear Dyn. 2009, 4. [Google Scholar] [CrossRef]
- Zhang, W.; Turner, K.L. Application of parametric resonance amplification in a single-crystal silicon micro-oscillator based mass sensor. Sens. Actuators A Phys. 2005, 122, 23–30. [Google Scholar] [CrossRef]
- Kacem, N.; Arcamone, J.; Perez-Murano, F.; Hentz, S. Dynamic range enhancement of nonlinear nanomechanical resonant cantilevers for highly sensitive NEMS gas/mass sensor applications. J. Micromechan. Microeng. 2010, 20. [Google Scholar] [CrossRef]
- Kacem, N.; Hentz, S.; Pinto, D.; Reig, B.; Nguyen, V. Nonlinear dynamics of nanomechanical beam resonators: Improving the performance of NEMS-based sensors. Nanotechnology 2009, 20. [Google Scholar] [CrossRef] [PubMed]
- Kacem, N.; Baguet, S.; Dufour, R.; Hentz, S. Overcoming limitations of nanomechanical resonators with simultaneous resonances. Appl. Phys. Lett. 2015, 107. [Google Scholar] [CrossRef]
- Antonio, D.; Zanette, D.H.; López, D. Frequency stabilization in nonlinear micromechanical oscillators. Nat. Commun. 2012, 3. [Google Scholar] [CrossRef] [PubMed]
- Kumar, V.; Boley, J.W.; Yang, Y.; Ekowaluyo, H.; Miller, J.K.; Chiu, G.T.-C.; Rhoads, J.F. Bifurcation-based mass sensing using piezoelectrically-actuated microcantilevers. Appl. Phys. Lett. 2011, 98. [Google Scholar] [CrossRef]
- Kumar, V.; Yang, Y.; Boley, J.W.; Chiu, G.T.-C.; Rhoads, J.F. Modeling, analysis, and experimental validation of a bifurcation-based microsensor. J. Microelectromechan. Syst. 2012, 21, 549–558. [Google Scholar] [CrossRef]
- Hiller, T.; Li, L.L.; Holthoff, E.L.; Bamieh, B.; Turner, K.L. System Identification, Design, and Implementation of Amplitude Feedback Control on a Nonlinear Parametric MEM Resonator for Trace Nerve Agent Sensing. J. Microelectromechan. Syst. 2015, 24, 1275–1284. [Google Scholar] [CrossRef]
- Boudjiet, M.-T.; Bertrand, J.; Pellet, C.; Dufour, I. New characterization methods for monitoring small resonant frequency variation: Experimental tests in the case of hydrogen detection with uncoated silicon microcantilever-based sensors. Sens. Actuators B Chem. 2014, 199, 269–276. [Google Scholar] [CrossRef]
- Howe, R.T.; Muller, R.S. Resonant-microbridge vapor sensor. IEEE Trans. Electron. Dev. 1986, 33, 499–506. [Google Scholar] [CrossRef]
- Tang, W.C.; Nguyen, T.-C.H.; Howe, R.T. Laterally driven polysilicon resonant microstructures. In Proceedings of the IEEE an Investigation of Micro Structures, Sensors, Actuators, Machines and Robots, Salt Lake City, UT, USA, 20–22 February 1989; pp. 53–59.
- Bedair, S.S.; Fedder, G.K. CMOS MEMS oscillator for gas chemical detection. IEEE Sens. 2004, 2, 955–958. [Google Scholar]
- Li, H.; Eddaoudi, M.; O’Keeffe, M.; Yaghi, O.M. Design and synthesis of an exceptionally stable and highly porous metal-organic framework. Nature 1999, 402, 276–279. [Google Scholar]
- Nugent, P.; Belmabkhout, Y.; Burd, S.D.; Cairns, A.J.; Luebke, R.; Forrest, K.; Pham, T.; Ma, S.; Space, B.; Wojtas, L.; et al. Porous materials with optimal adsorption thermodynamics and kinetics for CO2 separation. Nature 2013, 495, 80–84. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, J.L.; Ar, D.; Yu, X.J.; Liu, X.J.; Terfort, A. Patterned Deposition of Metal-Organic Frameworks onto Plastic, Paper, and Textile Substrates by Inkjet Printing of a Precursor Solution. Adv. Mater. 2013, 25, 4631–4635. [Google Scholar] [CrossRef] [PubMed]
- Khoshaman, A.H.; Bahreyni, B. Application of metal organic framework crystals for sensing of volatile organic gases. Sens. Actuators B Chem. 2012, 162, 114–119. [Google Scholar] [CrossRef]
- Sapsanis, C.; Omran, H.; Chernikova, V.; Shekhah, O.; Belmabkhout, Y.; Buttner, U.; Eddaoudi, M.; Salama, K.N. Insights on Capacitive Interdigitated Electrodes Coated with MOF Thin Films: Humidity and VOCs Sensing as a Case Stud. Sensors 2015, 15, 18153–18166. [Google Scholar] [CrossRef] [PubMed]
- Allendorf, M.D.; Houk, R.J.T.; Andruszkiewicz, L.; Talin, A.A.; Pikarsky, J.; Choudhury, A.; Gall, K.A.; Hesketh, P.J. Stress-induced Chemical Detection Using Flexible Metal-Organic Frameworks. J. Am. Chem. Soc. 2008, 130. [Google Scholar] [CrossRef] [PubMed]
- Shekhah, O.; Liu, J.; Fischer, R.A.; Wöll, C. MOF thin films: Existing and future applications. Chem. Soc. Rev. 2011, 40, 1081–1106. [Google Scholar] [CrossRef] [PubMed]
- Shekhah, O.; Roques, N.; Mugnaini, V.; Munuera, C.; Ocal, C.; Veciana, J.; Wöll, C. Grafting of monocarboxylic substituted polychlorotriphenylmethyl radicals onto a COOH-functionalized self-assembled monolayer through copper (II) metal ions. Langmuir 2008, 24, 6640–6648. [Google Scholar] [CrossRef] [PubMed]
- Azzam, E.M.S.; Bashir, A.; Shekhah, O.; Alwady, A.R.E.; Birkner, A.; Grunwald, C.; Wöll, C. Fabrication of a surface plasmon resonance biosensor based on gold nanoparticles chemisorbed onto a 1,10-decanedithiol self-assembled monolayer. Thin Solid Films 2009, 518, 387–391. [Google Scholar] [CrossRef]
- St Petkow, P.; Vayssilov, G.N.; Liu, J.; Shekhah, O.; Wang, Y.; Wöll, C.; Heine, T. Defects in MOFs: A thorough characterization. Chem. Phys. 2012, 13, 2025–2029. [Google Scholar] [CrossRef] [PubMed]
- Polytec Laser Doppler Vibrometer. Available online: http://www.polytec.com/us/ (accessed on 19 May 2016).
- Younis, M.I.; Nayfeh, A. A study of the nonlinear response of a resonant microbeam to an electric actuation. Nonlinear Dyn. 2003, 31, 91–117. [Google Scholar] [CrossRef]
- Shekhah, O.; Eddaoudi, M. The liquid phase epitaxy method for the construction of oriented ZIF-8 thin films with controlled growth on functionalized surfaces. Chem. Commun. 2013, 49, 10079–10081. [Google Scholar] [CrossRef] [PubMed]
- Arduino Microcontroller. Available online: http://www.arduino.cc/ (accessed on 19 May 2016).
- Hauer, B.; Doolin, C.; Beach, K.; Davis, J. A general procedure for thermomechanical calibration of nano/micro-mechanical resonators. Ann. Phys. 2013, 339, 181–207. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Dimensions |
|---|---|---|
| L | Length | 600 μm |
| h | Thickness | 6.85 μm |
| b | Width | 50 μm |
| d | Gap | 2 μm |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bouchaala, A.; Jaber, N.; Yassine, O.; Shekhah, O.; Chernikova, V.; Eddaoudi, M.; Younis, M.I. Nonlinear-Based MEMS Sensors and Active Switches for Gas Detection. Sensors 2016, 16, 758. https://doi.org/10.3390/s16060758
Bouchaala A, Jaber N, Yassine O, Shekhah O, Chernikova V, Eddaoudi M, Younis MI. Nonlinear-Based MEMS Sensors and Active Switches for Gas Detection. Sensors. 2016; 16(6):758. https://doi.org/10.3390/s16060758
Chicago/Turabian StyleBouchaala, Adam, Nizar Jaber, Omar Yassine, Osama Shekhah, Valeriya Chernikova, Mohamed Eddaoudi, and Mohammad I. Younis. 2016. "Nonlinear-Based MEMS Sensors and Active Switches for Gas Detection" Sensors 16, no. 6: 758. https://doi.org/10.3390/s16060758
APA StyleBouchaala, A., Jaber, N., Yassine, O., Shekhah, O., Chernikova, V., Eddaoudi, M., & Younis, M. I. (2016). Nonlinear-Based MEMS Sensors and Active Switches for Gas Detection. Sensors, 16(6), 758. https://doi.org/10.3390/s16060758