Abstract
There is a problem that complex operation which leads to a heavy calculation burden is required when the direction of arrival (DOA) of a sparse signal is estimated by using the array covariance matrix. The solution of the multiple measurement vectors (MMV) model is difficult. In this paper, a real-valued sparse DOA estimation algorithm based on the Khatri-Rao (KR) product called the L1-RVSKR is proposed. The proposed algorithm is based on the sparse representation of the array covariance matrix. The array covariance matrix is transformed to a real-valued matrix via a unitary transformation so that a real-valued sparse model is achieved. The real-valued sparse model is vectorized for transforming to a single measurement vector (SMV) model, and a new virtual overcomplete dictionary is constructed according to the KR product’s property. Finally, the sparse DOA estimation is solved by utilizing the idea of a sparse representation of array covariance vectors (SRACV). The simulation results demonstrate the superior performance and the low computational complexity of the proposed algorithm.
1. Introduction
The direction of arrival (DOA) estimation is an important area of research in array signal processing. Currently, there are many DOA estimation algorithms with good performance, such as the multiple signal classification (MUSIC) algorithm, the estimation of signal parameters via rotational invariance techniques (ESPRIT) algorithm, etc. Most of these traditional DOA estimation algorithms require the source number as a priori information and a large number of snapshots to guarantee the estimation precision. In recent years, the DOA estimation that utilizes the idea of sparse representation has become many scholars’ research hotspot [1,2]. The target signals can be regarded to be sparse in a spatial domain, and their DOAs can be estimated according to the array received data and a redundant dictionary. The DOA estimation algorithm by utilizing the idea of sparse representation mainly divides into two kinds [3,4]. One is the sparse model based on the array received data, and the other one is the sparse model based on the array covariance matrix. The singular value decomposition (SVD) of the array received data is used to propose a L1-SVD algorithm for DOA estimation [5]. Literature [6] introduces the idea of a sparse representation of array covariance vectors (SRACV) to propose a method called the L1-SRACV algorithm for estimating sparse signals’ DOAs. Compared to L1-SVD, the L1-SRACV algorithm does not need to determine the regularization parameter and has a higher stability. However, the L1-SRACV algorithm needs to estimate the noise power. In [7,8], L1-SRACV is improved such that the noise power is unnecessary and the algorithm’s robustness is enhanced. However, the above algorithms are all the resolution problems of the multiple measurement vectors (MMV) model and refer to complex operations and thus a heavy calculation burden. In this paper, the sparse model based on the array covariance matrix is transformed to a real-valued sparse model via a unitary transformation so that the amount of calculation is reduced by at least four times. Then, the real-valued sparse model is vectorized, and the MMV model is transformed to a single measurement vector (SMV) one whose calculation complexity is lower. Recently, the Khatri-Rao (KR) approach for DOA estimation increases rapidly. It can extend the array aperture effectively, increase the degree of freedom, and deal with the underdetermined DOA estimation in cases where the number of array elements is less than the source number in some conditions [9,10,11]. According to the property of the KR product and the real-valued overcomplete dictionary achieved by a unitary transformation, this paper constructs a new real-valued dictionary and uses the idea of a SRACV to estimate the target signals’ DOAs. The simulations demonstrate that the proposed algorithm has a good estimation performance and a low amount of calculation.
In this paper, the italic letters, the bold italic capital letters, and the bold italic lower-case letters denote variables, matrices, and vectors, respectively. The remainder of this paper is organized as follows. The sparse DOA estimation model based on the array covariance matrix is introduced in Section 2. The proposed algorithm and the detailed formula derivation of the proposed algorithm is given in Section 3. The simulation results and conclusions are given in Section 4 and Section 5, respectively.
2. Signal Model for DOA Estimation
2.1. Input Signal Model
Suppose a uniform linear array (ULA) which has elements, and the element spacing is . There are uncorrelated far-field narrowband signals impinging on the array from directions . The array received signal is given by
where is the array manifold matrix whose steering vector is , , denotes the wavelength of the incident signals, denotes the transpose, is the Gaussian signal with mean zero, is additive Gaussian white noise, and is the number of snapshots.
2.2. Signal Model Based on Sparse Representation
Suppose that the grid () contains all the potential directions in the spatial domain. The sparse representation of the signal can be expressed as follows:
where is an overcomplete dictionary of size , is a sparse signal of size in the spatial domain, and is equal to when the target locates at and is zero otherwise.
The array covariance matrix is
where denotes the conjugate transpose, is the covariance matrix of the sparse signal where denotes the expectation, and , is the spatial signal’s power, denotes the noise power, and denotes an identity matrix of size .
3. The Real-Valued Sparse DOA Estimation Based on the KR Product
3.1. The Real-Valued Sparse Model for DOA Estimation
In this section, a real-valued sparse DOA estimation algorithm based on the KR product called the L1-RVSKR is proposed. As multiplication operation occupies the most proportion in the calculation and a complex multiplication requires four real number multiplications, the complex data of the array can be transformed to real data in order to reduce the computational complexity [12,13,14,15]. Define a unitary matrix as follows:
where , , and denote the identity matrix, the permutation matrix, and the null matrix, respectively.
Theorem 1.
For any Hermitian persymmetric matrix , is real and symmetric.
However, as the number of snapshots in practice is finite, the practical sampling covariance matrix is Hermitian but generally not persymmetric. Therefore, the persymmetrized estimator of the practical sampling covariance matrix is
where denotes the complex conjugate.
The array manifold matrix of the isometric uniform linear array satisfies that and we have
where the diagonal matrix , and the rotation matrix .
The real-valued symmetrical matrix can be achieved via a unitary transformation
The equation is substituted into Equation (7) and we have
where denotes the real part and
and the real-valued overcomplete dictionary is
If is even, the real-valued steering vector is
and, if is odd, the real-valued steering vector is
Then, an important property of the KR product is used with Equation (8). The property of the KR product can be expressed as follows [9]:
where is the vectorization operation that stacks each column of a matrix one by one, , , denotes the KR product, , denotes Kronecker product, , and is a diagonal matrix.
According to the above property, Equation (14) is applied to Equation (8), and Equation (8) can be vectorized as
where is the vector form of , and is a vector which is consist of the diagonal elements of the matrix . Equation (15) can be considered a new observation model, in which the observation vector , the dictionary , and the sparse vector are all real-valued. Furthermore, the MMV model is transformed to a SMV model by using the KR product’s property. Therefore, the computational complexity can be effectively decreased. Moreover, the dictionary is constructed via the KR product so that a new virtual array is produced [16]. The dimension of the produced virtual array is , and the number of the distinct rows in is , which is greater than the matrix ’s dimension . Therefore, the array aperture is extended, and the resolving power is effectively improved.
3.2. DOA Estimation Based on a SRACV
According to Equations (5) and (7), can also be formulated as
where and .
The vector form of Equation (16) can be expressed as
where
and
As the number of snapshots is finite in practice, the practical sampling covariance matrix is given by
where is the estimate error. The vector satisfies an asymptotic normal distribution [17,18]
where denotes an asymptotic normal distribution whose expectation is and whose variance is . According to the literature [17,18,19], it can be known that
and
where
and
In order to obtain the covariance of and , firstly we have
where , , denote the column of , the column of and the element of , respectively.
Then, the covariance matrix of and is given by
where denotes the covariance matrix of and , and we have
From Equation (30), it can be known that and are dependent. Obviously, the sum of and still satisfies an asymptotic normal distribution
Define , and we have
and
where , denotes an asymptotic chi-square with degrees of freedoms. Then, the following formula can hold with a high probability
where , which can be obtained through the function in Matlab. Further, the formula for sparse DOA estimation is given by
It is obvious that only the matrix is complex in Equation (35). Therefore, the operations before are all real number operations for a low calculation complexity. The computational complexity of the operations before is reduced by at least four times. In fact, solving Equation (35) through a second-order cone programming (SOCP) framework occupies most of the computational complexity in the proposed algorithm. Solving Equation (35) requires in the proposed algorithm, while it requires in the L1-SRACV algorithm and in the L1-SVD algorithm [5,6,20]. It is obvious that the computational complexity of the proposed algorithm is much lower than those of the other two algorithms.
The proposed L1-RVSKR method can be considered as the unitary L1-SRACV algorithm. The array covariance matrix is transformed to a real one and vectorized. By this way, a real-valued SMV model is obtained, and the calculation complexity is decreased. Moreover, the KR product is used to construct a new virtual dictionary that increases the degree of freedom.
4. Simulation Experiments
In this section, several simulations are performed with MATLAB R2014a and CVX toolbox to verify the performance of the proposed L1-RVSKR algorithm. Firstly, the spatial spectra of the L1-RVSKR method is compared with L1-SRACV, L1-SVD, and MUSIC. Then, several experiments are performed to compare the estimation performance of different algorithms versus the signal-to-noise ratio (SNR), the angle interval, and the number of snapshots. Finally, the low computational complexity of the proposed algorithm is verified and analyzed by comparing the running time with the other two algorithms. We consider a ULA with spacing in the following simulations, and the number of sensors is 8 except that shown in Figure 1 and the last simulation. The grid is divided in the range of to spacing . The probability is set to be to achieve the parameter , and the average value of the smallest eigenvalues of is used as in the L1-RVSKR and L1-SRACV algorithms.
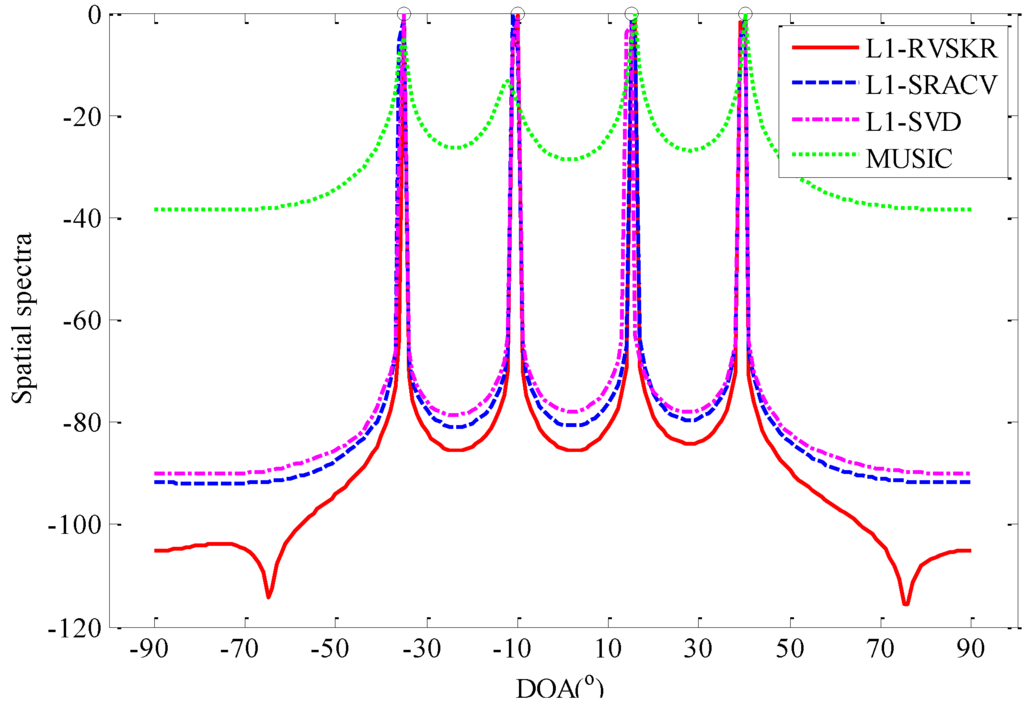
Figure 1.
The spatial spectra for four signals with the number of sensors , the number of snapshots and SNR = 0 dB.
4.1. The Spatial Spectra Comparison
In this simulation, the spatial spectra of the L1-RVSKR algorithm is compared with L1-SRACV, L1-SVD, and MUSIC. Consider four uncorrelated far-field narrowband signals arriving at the array from directions . The number of sensors is 5, and the number of snapshots is 500. Figure 1 shows the spatial spectra of different methods with SNR = 0 dB. It can be seen from Figure 1 that the spatial resolution of the L1-RVSKR algorithm is better than those of the other algorithms, and it has no pseudo-peaks in such a simulation condition. In Figure 2, we consider two uncorrelated far-field narrowband signals arriving at the array from directions and . The number of sensors is 8, and the number of snapshots is 300. Figure 2 shows that the L1-RVSKR algorithm can distinguish each signal in different SNRs. Several pseudo-peaks appear with the L1-RVSKR and L1-SRACV algorithms when SNR is high, but the pseudo-peaks are lower than that of the real estimated DOA. With the decrease of the SNR, there is only one pseudo-peak of the L1-RVSKR algorithm left, which is less than that of the L1-SRACV algorithm. Moreover, the L1-SVD and MUSIC algorithms cannot distinguish the signals with low SNR, although they have no pseudo-peaks.
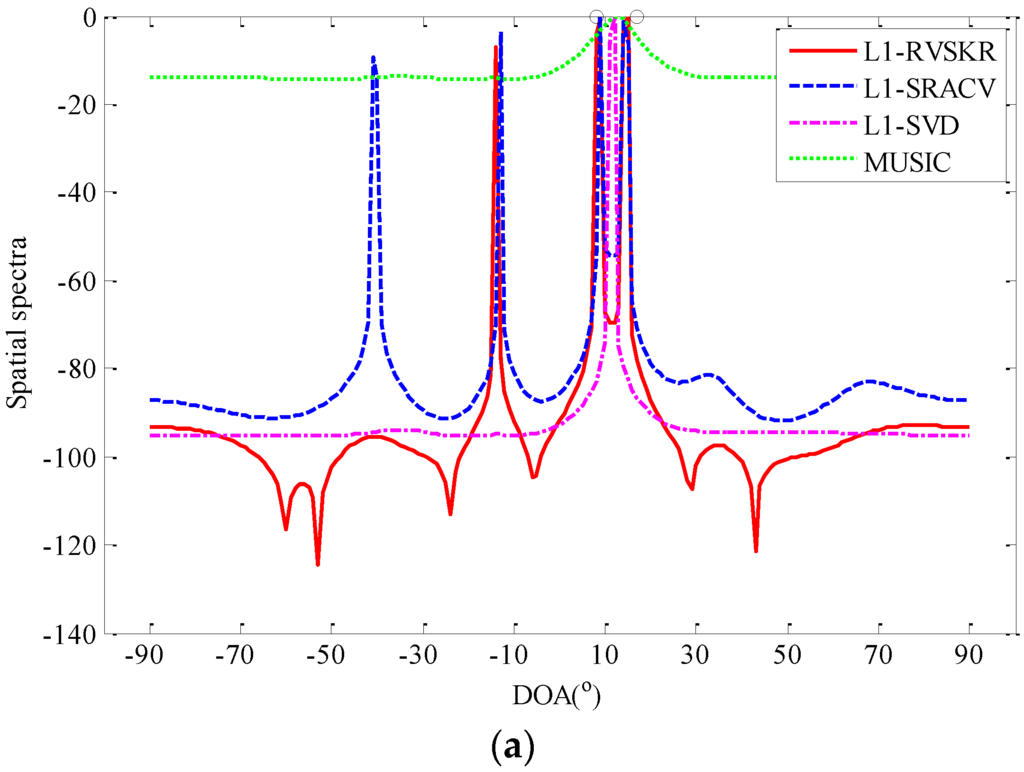
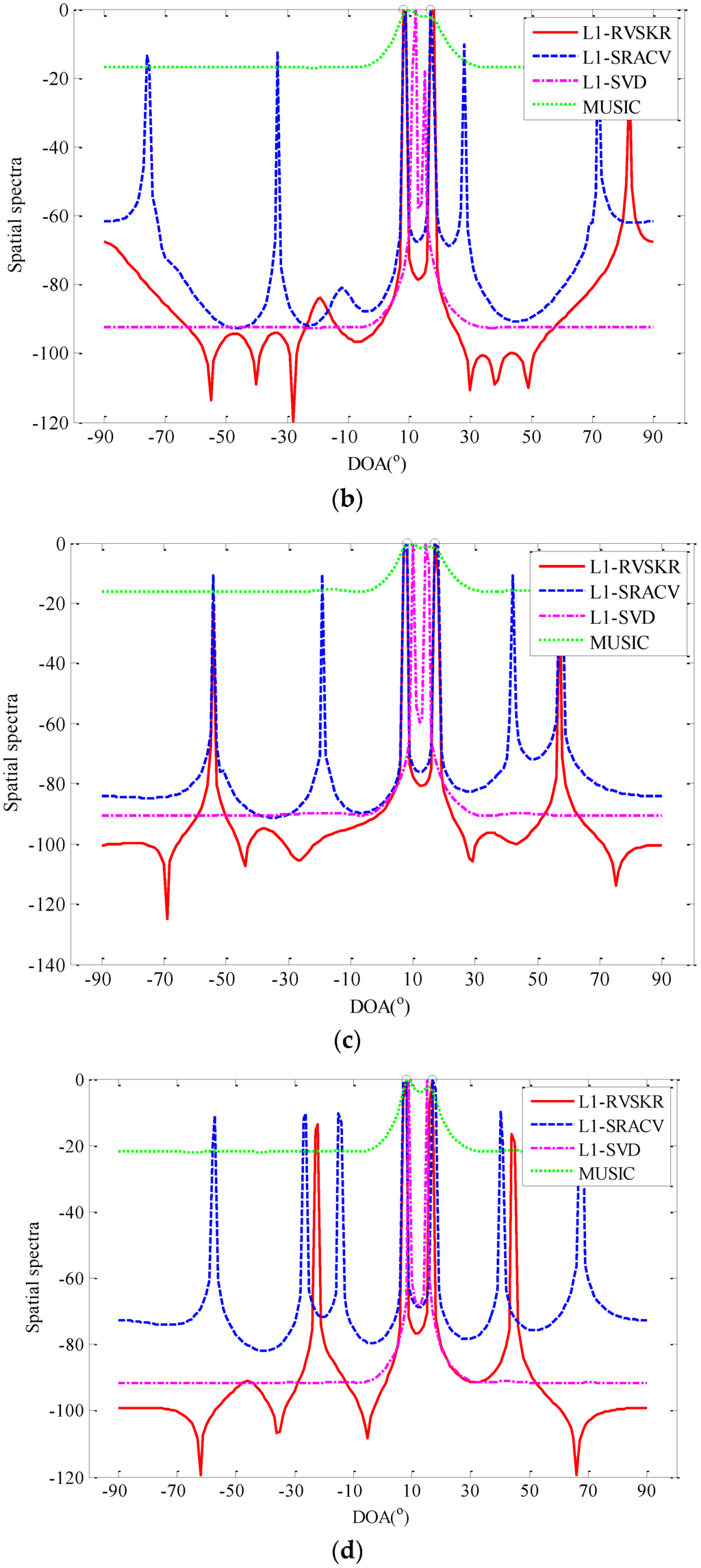
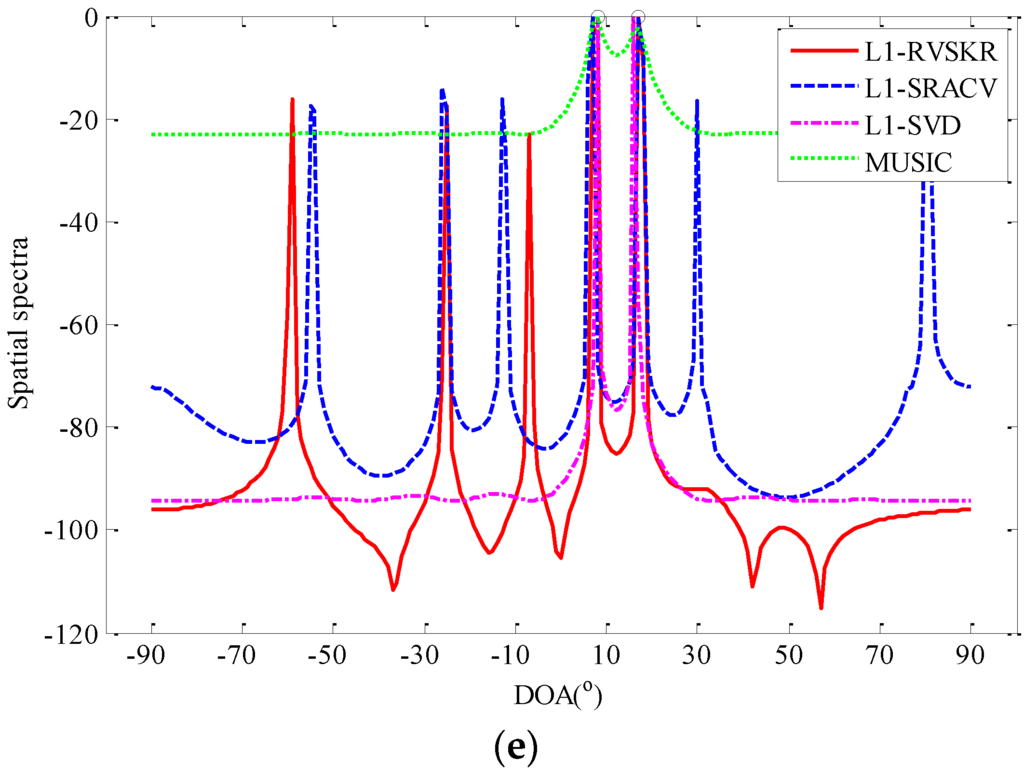
Figure 2.
The spatial spectra for two signals with the number of sensors and the number of snapshots : (a) SNR = −8 dB; (b) SNR = −6 dB; (c) SNR = −4 dB; (d) SNR = −2 dB; (e) SNR = 0 dB. DOA: direction of arrival; RVSKR: real-valued sparse DOA estimation algorithm based on the KR product; SRACV: sparse representation of array covariance vectors; SVD: singular value decomposition; MUSIC: multiple signal classification; SNR: signal-to-noise ratio.
According to the above simulation results, the L1-RVSKR and L1-SRACV algorithms are easy to produce pseudo-peaks because they are realized by L1-norm minimization. The problem can be solved by the idea of a weighted L1-norm constraint [21,22].
4.2. The Estimation Performance versus SNR
In this section, the estimation performance of different methods versus the SNR is compared by an experiment. Firstly, we define the root mean square error (RMSE) as follows:
where denotes the number of independent Monte Carlo simulations, and is the estimated value of in the simulation.
Similarly, we consider two uncorrelated far-field narrowband signals from directions and . The number of snapshots is 300. The SNR varies from −10 dB to 10 dB with 2 dB steps. For each SNR, 50 Monte Carlo simulations are performed to verify the performance of the proposed method. The simulation result is shown in Figure 3. It is shown that the RMSEs of the three algorithms decrease with the increase of the SNR. The RMSE of L1-RVSKR is less than those of the other two methods when the SNR is less than −6 dB. It is declared that the proposed L1-RVSKR algorithm can achieve better performance than the other two methods with low SNR.
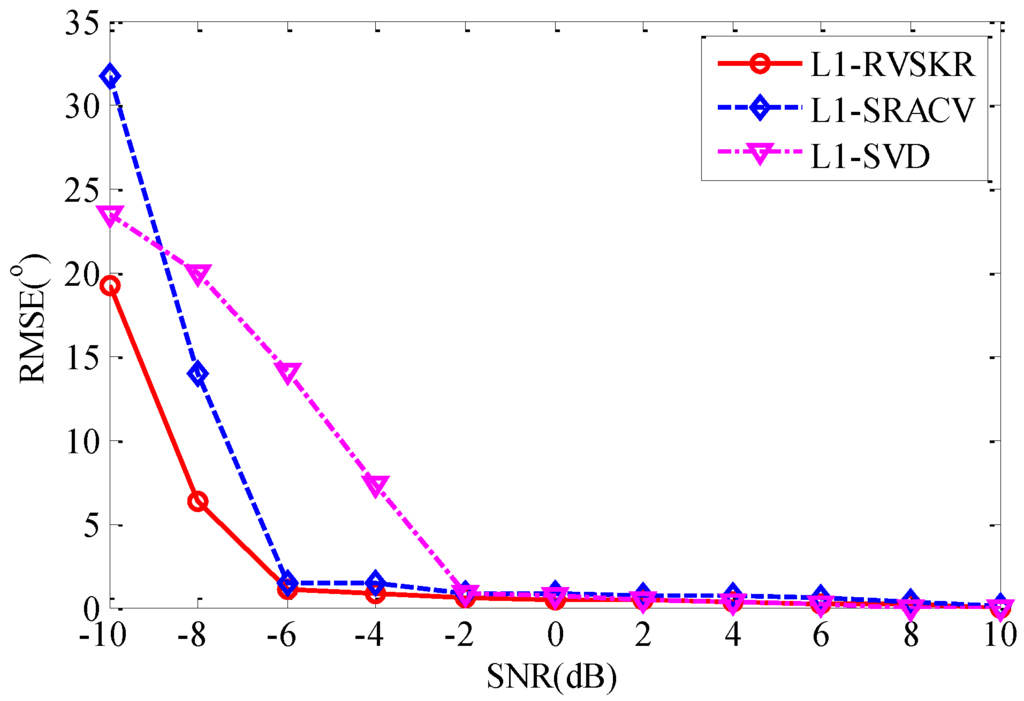
Figure 3.
Root mean square error (RMSE) of DOA estimation versus SNR.
4.3. The Angle Resolution Capability
In this section, the angle resolution capabilities of different algorithms are compared. We suppose that there are two uncorrelated signals whose directions are and . The angle interval varies from to with a step of . For each angle interval, 50 Monte Carlo simulations are performed to compare the angle resolution capability of the proposed method with MUSIC, L1-SVD, and L1-SRACV. The SNR is set to 0 dB, and the number of snapshots is 300. Figure 4 shows the comparison of the angular resolution of different methods. It can be seen from Figure 4 that the RMSEs of the four methods decrease with the increase of the angle interval. The RMSE of L1-RVSKR decreases significantly when the angle interval is smaller than , and the performance of L1-RVSKR is superior to the other methods when the angle interval is smaller than . This simulation illustrates that the resolving ability of the proposed method is superior to those of the other three methods.
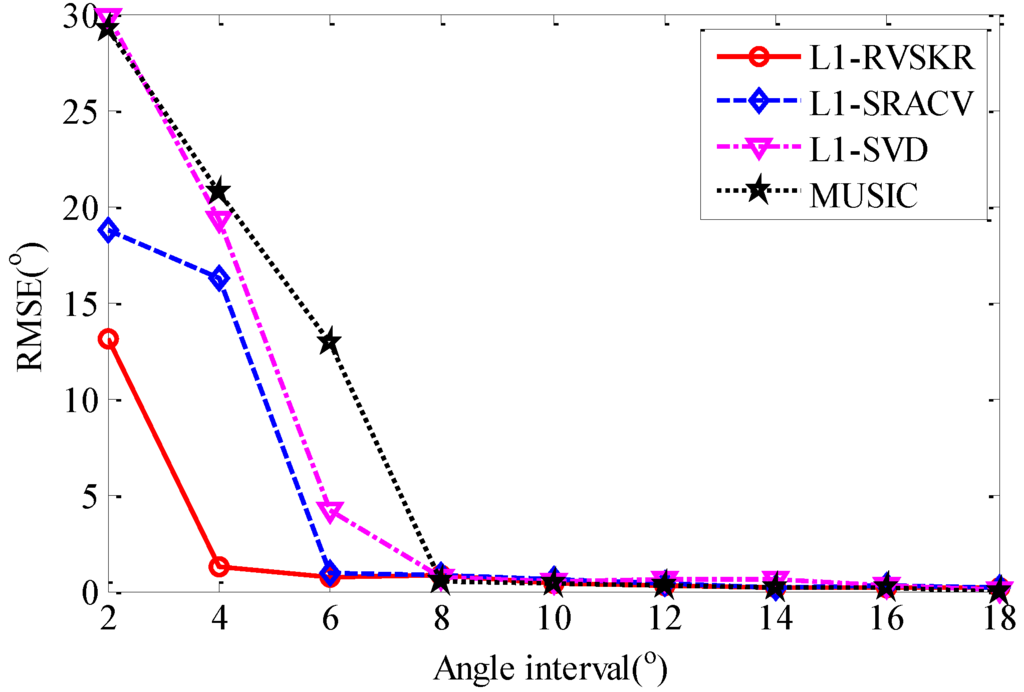
Figure 4.
RMSE of DOA estimation versus the angle interval.
4.4. The Estimation Performance versus the Number of Snapshots
In this section, we analyze the relationship of the RMSE of the DOA estimation and the number of snapshots in the case of . Consider two uncorrelated far-field narrowband signals impinging on the array from directions and . The number of snapshots varies from 100 to 350 with a step of 50. For each number of snapshots, 50 Monte Carlo simulations are performed to verify the performance of the proposed method. It can be seen from Figure 5 that the RMSEs of the three methods decrease as the increase of the number of snapshots. It is illustrated in this simulation that the RMSE of the L1-RVSKR algorithm is smaller than the other two methods, and the L1-RVSKR algorithm has a better performance with a small number of snapshots.
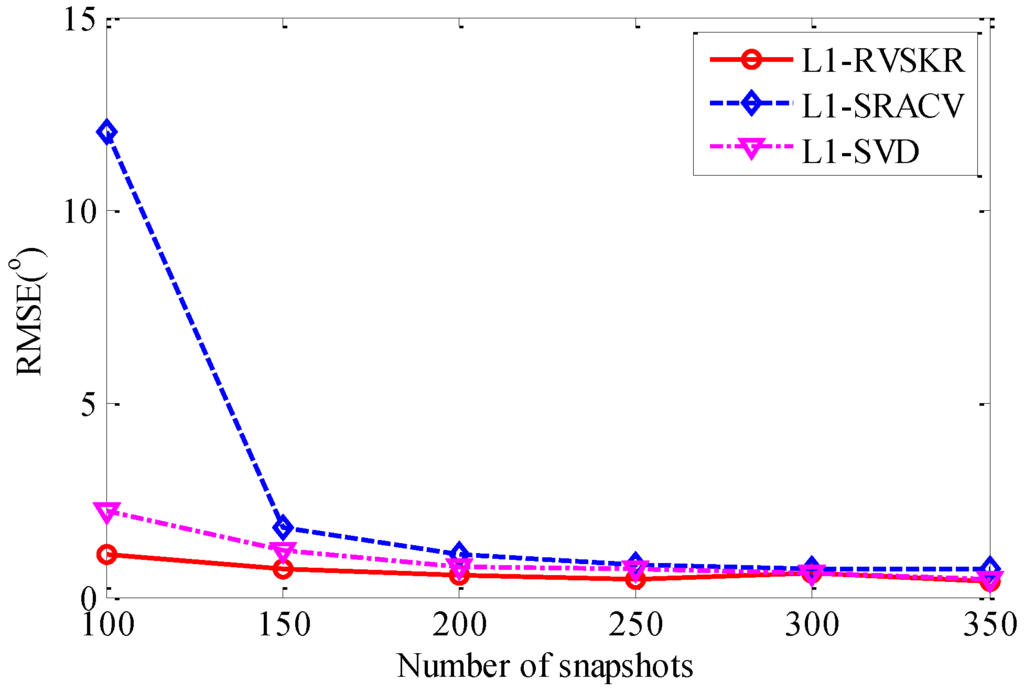
Figure 5.
RMSE versus the number of snapshots.
4.5. The Algorithm Complexity Analysis
In this section, we perform 50 Monte Carlo simulations to verify the low computational complexity of the proposed L1-RVSKR algorithm. The average running time of the three algorithms with different numbers of sensors is shown in Table 1 and Figure 6. It is shown that the running time of L1-RVSKR is the shortest among the three algorithms. The proposed L1-RVSKR algorithm runs much faster than the other two algorithms and has a higher computational efficiency. Therefore, L1-RVSKR outperforms the other two algorithms with low computational complexity according to the above analysis and simulation results.

Table 1.
The running time versus the number of sensors.
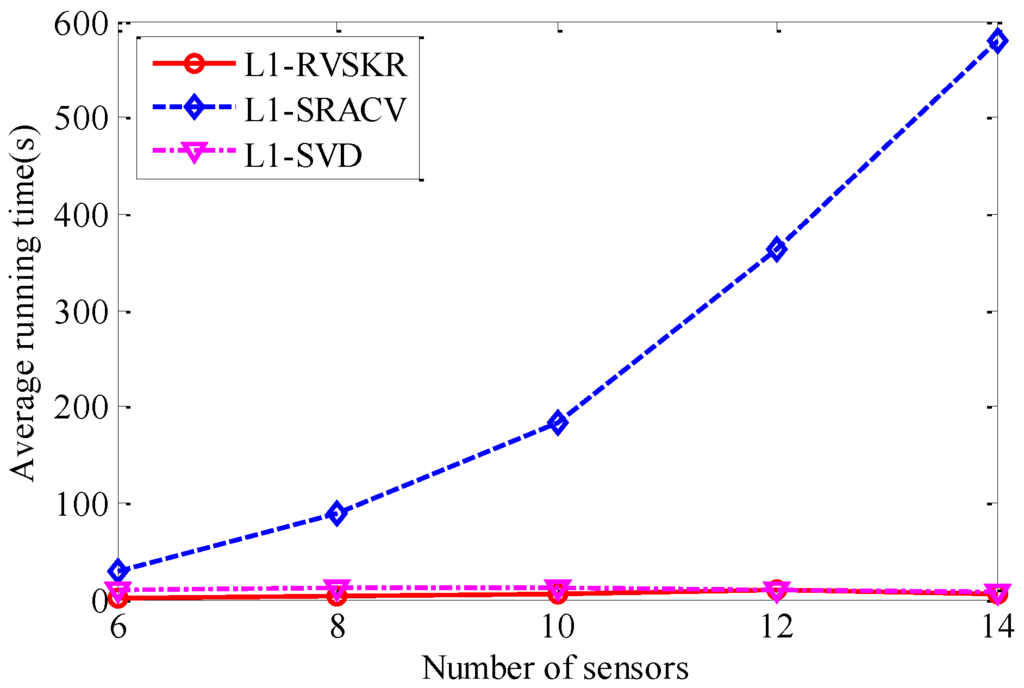
Figure 6.
The average running time versus the number of sensors.
5. Conclusions
In this paper, we propose a real-valued sparse DOA estimation algorithm by using the KR product. The sparse model of the array covariance matrix is transformed to a real-valued one via a unitary transformation. Therefore, the calculated amount is reduced. Moreover, the vectorization is made to transform the real-valued MMV model to a SMV one. The array aperture is extended, and the estimation accuracy is improved by using the KR product. Finally, the idea of a SRACV is utilized for DOA estimation. The simulation results show that the proposed method can achieve better performance than L1-SVD and L1-SRACV with a low SNR, a small angle interval, and a small number of snapshots. The proposed method also improves the computational efficiency. However, the algorithm cannot deal with an underdetermined DOA estimation because the sparse model used is a model of SMV. We will work on this aspect in the future.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (No. 61571146 and 61301200) and the Fundamental Research Funds for the Central Universities (HEUCF1508).
Author Contributions
The idea of this work was proposed by Tao Chen and Huanxin Wu. Tao Chen and Huanxin Wu performed the experiments and analyzed the simulation results. Zhongkai Zhao wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- He, Z.Q.; Shi, Z.P.; Huang, L.; So, H.C. Underdetermined DOA estimation for wideband signals using robust sparse covariance fitting. IEEE Signal Process. Lett. 2015, 22, 435–439. [Google Scholar] [CrossRef]
- Si, W.J.; Qu, X.G.; Qu, Z.Y. Off-Grid DOA Estimation Using Alternating Block Coordinate Descent in Compressed Sensing. Sensors 2015, 15, 21099–21113. [Google Scholar] [CrossRef] [PubMed]
- Pejoski, S.; Kafedziski, V. Sparse covariance fitting method for direction of arrival estimation of uncorrelated wideband signals. Telfor J. 2014, 6, 115–120. [Google Scholar] [CrossRef]
- Lin, B.; Liu, J.; Xie, M.; Zhu, J. Sparse Signal Recovery for Direction-of-Arrival Estimation Based on Source Signal Subspace. J. Appl. Math. 2014, 2014, 101–111. [Google Scholar] [CrossRef]
- Malioutov, D.; Çetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef]
- Yin, J.H.; Chen, T.Q. Direction-of-arrival estimation using a sparse representation of array covariance vectors. IEEE Trans. Signal Process. 2011, 59, 4489–4493. [Google Scholar] [CrossRef]
- He, Z.Q.; Shi, Z.P.; Huang, L. Covariance sparsity-aware DOA estimation for nonuniform noise. Digit. Signal Process. 2014, 28, 75–81. [Google Scholar] [CrossRef]
- Xie, H.; Feng, D.Z.; Yuan, M.D. DOA estimation method by utilizing sparse representation of the covariance matrix. J. Xidian Univ. 2015, 42, 35–41. [Google Scholar]
- Ma, W.K.; Hsieh, T.H.; Chi, C.Y. DOA estimation of quasi-stationary signals with less sensors than sources and unknown spatial noise covariance: A Khatri-Rao subspace approach. IEEE Trans. Signal Process. 2010, 58, 2168–2180. [Google Scholar] [CrossRef]
- Liu, Q.H.; Jin, L.N.; Ouyang, S. Wideband DOA Estimation with Interpolated Focusing KR Product Matrix. Int. J. Signal Process. Image Process. Pattern Recognit. 2015, 8, 201–210. [Google Scholar] [CrossRef]
- Liu, Q.H.; Ouyang, S.; He, Z.Q. DOA estimation of quasi-stationary signals based on Khatri-Rao product using joint sparse signal representation. Syst. Eng. Electron. 2012, 34, 1753–1757. [Google Scholar]
- Huarng, K.C.; Yeh, C.C. A unitary transformation method for angle-of-arrival estimation. IEEE Trans. Signal Process. 1991, 39, 975–977. [Google Scholar] [CrossRef]
- Dai, J.S.; Wu, Z.; Tang, Z. Real-valued sparse representation method for DOA estimation with uniform linear array. In Proceedings of the 2012 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 3794–3797.
- Dai, J.J.; Xu, X.; Zhao, D.B. Direction-of-arrival estimation via real-valued sparse representation. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 376–379. [Google Scholar] [CrossRef]
- Wu, Z.; Dai, J.S.; Zhu, X.L.; Zhao, D.A. A Real-Valued Sparse Representation Method for DOA Estimation with Unknown Mutual Coupling. Acta Armamentarii 2015, 36, 294–298. [Google Scholar]
- Hu, N.; Ye, Z.F.; Xu, X.; Bao, M. DOA estimation for sparse array via sparse signal reconstruction. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 760–773. [Google Scholar] [CrossRef]
- Ottersten, B.; Stoica, P.; Roy, R. Covariance matching estimation techniques for array signal processing applications. Digit. Signal Process. 1991, 8, 185–210. [Google Scholar]
- Li, H.; Stoica, P.; Li, J. Computationally efficient maximum likelihood estimation of structured covariance matrices. IEEE Trans. Signal Process. 1999, 47, 1314–1323. [Google Scholar]
- Seber, G.A. A Matrix Handbook for Statisticians, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2008; pp. 427–462. [Google Scholar]
- He, Z.Q.; Liu, Q.H.; Jin, L.N.; Ouyang, S. Low complexity method for DOA estimation using array covariance matrix sparse representation. Electron. Lett. 2013, 49, 228–230. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B.; Boyd, S.P. Enhancing sparsity by reweighted ℓ1 minimization. J. Fourier Anal. Appl. 2008, 14, 877–905. [Google Scholar] [CrossRef]
- Du, R.Y.; Liu, F.L.; Peng, L. W-L1-Sracv Algorithm for Direction-of-Arrival Estimation. Prog. Electromagn. Res. C 2013, 38, 165–176. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).