
LS Channel Estimation and Signal Separation for UHF RFID Tag Collision Recovery on the Physical Layer


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Algorithm Section
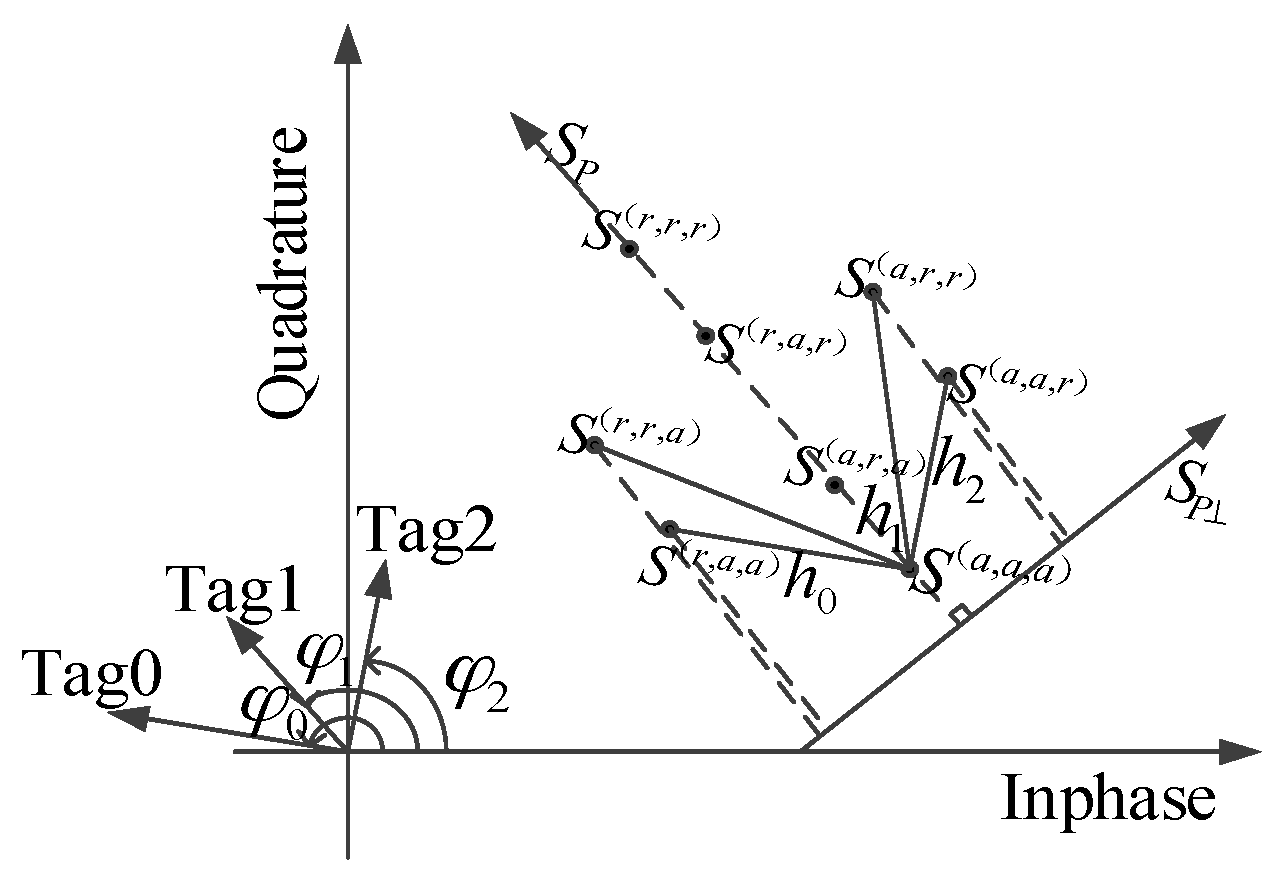
2.1. System Model
2.2. The Related Work of Channel Estimation
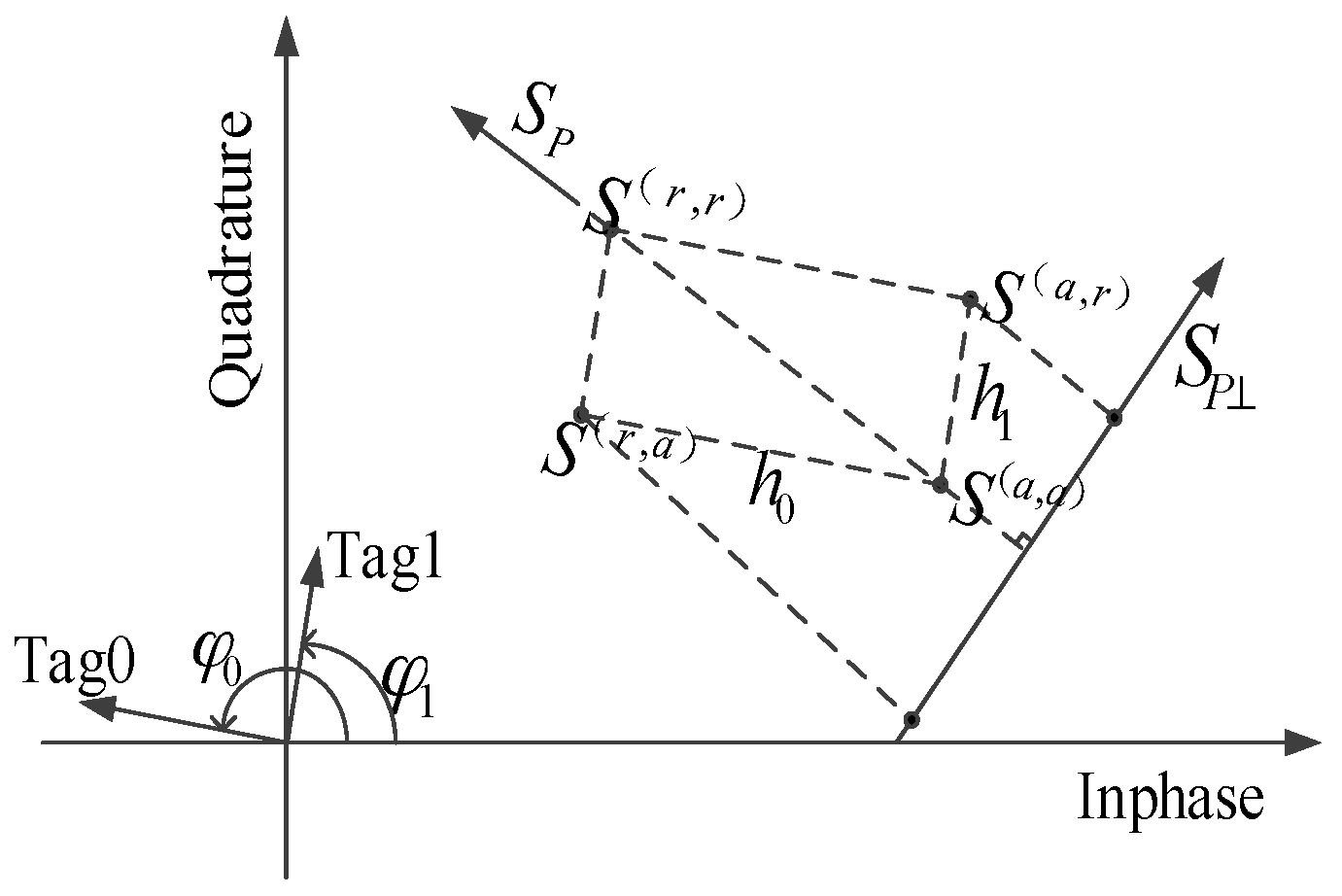
- S(a,a) = L denotes a state which both tags absorb;
- S(r,a) = L + h0 and S(a,r) = L + h1 denote states which one absorbs and the other reflects;
- S(r,r) = L + h0 + h1 denotes a state which both tags reflect; and
- is the orthogonal subspace of a signal space SP shown in Figure 1.
2.3. OLCE Algorithm
- ;
- ;
- , n = 0,1,…,N − 1
- ,
- , n = 0,1,…,N − 1
- , j = 0,1,…,J − 1
2.4. The Performance Analysis of Channel Estimation
2.5. Signal Separation
- Set γ0 = 1, γ1 = 2, γ2 = 4, …, γn = 2n−1
- Obtain the signal y(t)
- for t = 1:T
- if y(t) == γ0
- j = m0;
- ;
- m0++;
- end
- if y(t) == γ1
- j = m1;
- ;
- m1++;
- end
- …
- if y(t) == γn
- j = mn;
- ;
- mn ++;
- end
- end
- for m = 1:N
- for n = 1:N
- for j = 1:J
- p = (n − 1) × J + j;
- X(p,m)= ;
- end
- end
- end
- for q = 1: length(clustering centers)
- distance = Euclidean distance (z(t), clustering centers(q));
- end
- [v,c] = min(distance);
- separate the collided signals
3. Results and Discussion
3.1. System Settings
- Sampling frequency: 750 kHz
- Block length: The length K is 16 and identical to that of RN16 specified in EPC C1 Gen2 [16]
- Antenna: single receiving antenna
- The initial frame length: 128
- In LCE algorithm: When the number of collided tags is 2, 3, 4, and 5, M is 2, 3, 4, and 5.
- In OLCE algorithm: When the number of collided tags is 2, 3, 4, and 5, J is 120, 35, 15, and 5. The reason why J is chosen as such values is that, J needs to satisfy the orthogonal matrix condition and decrease with the number of collided tags
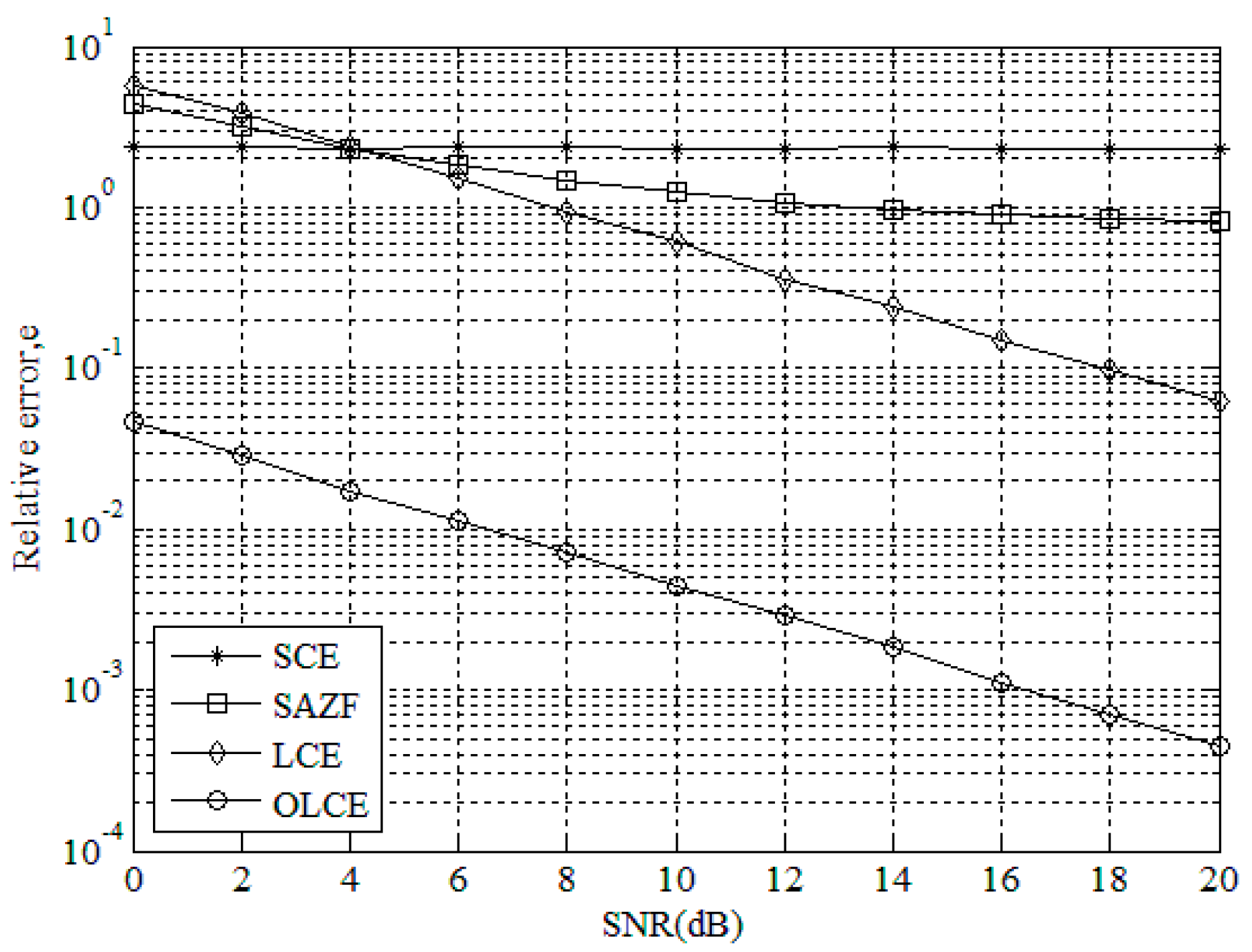
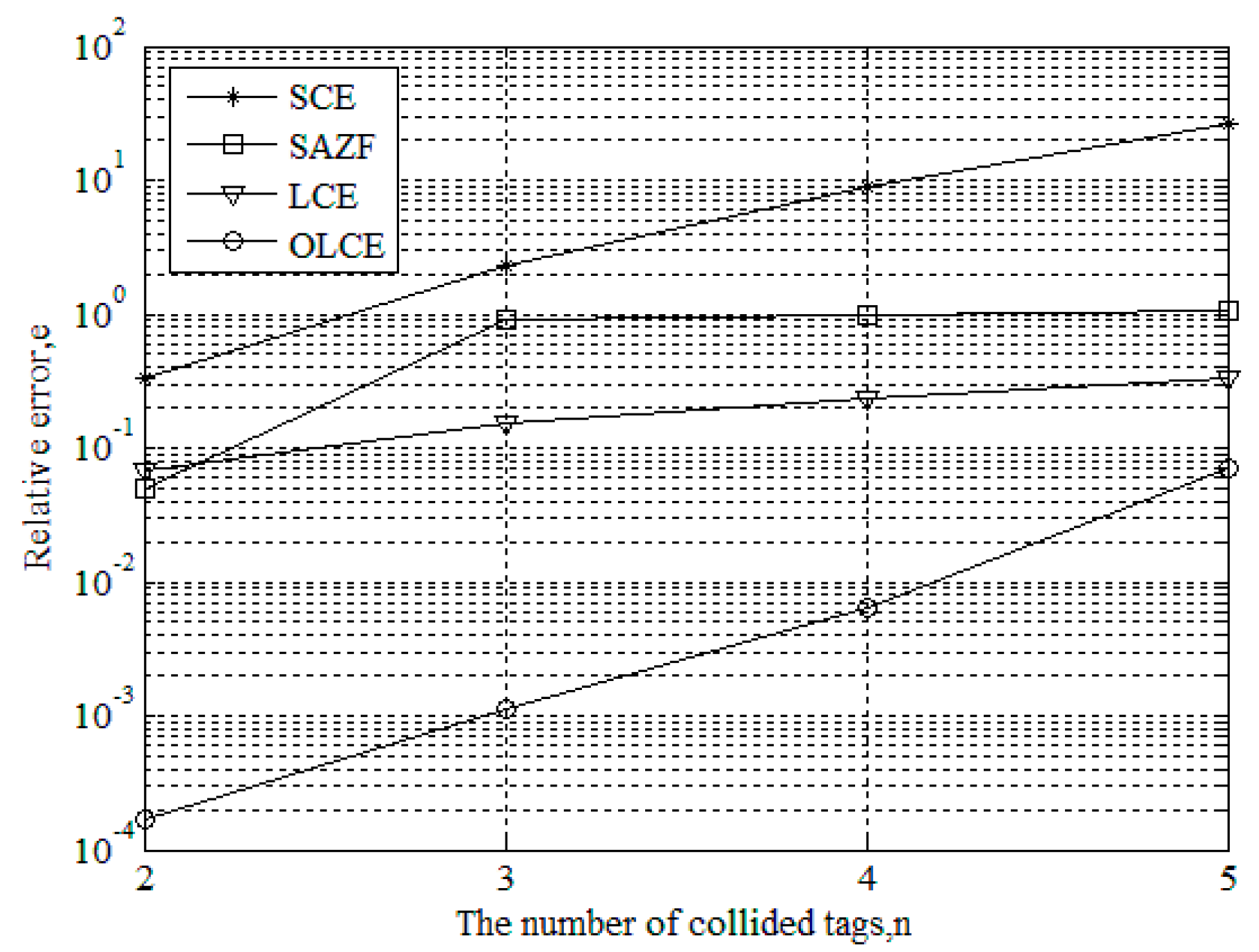
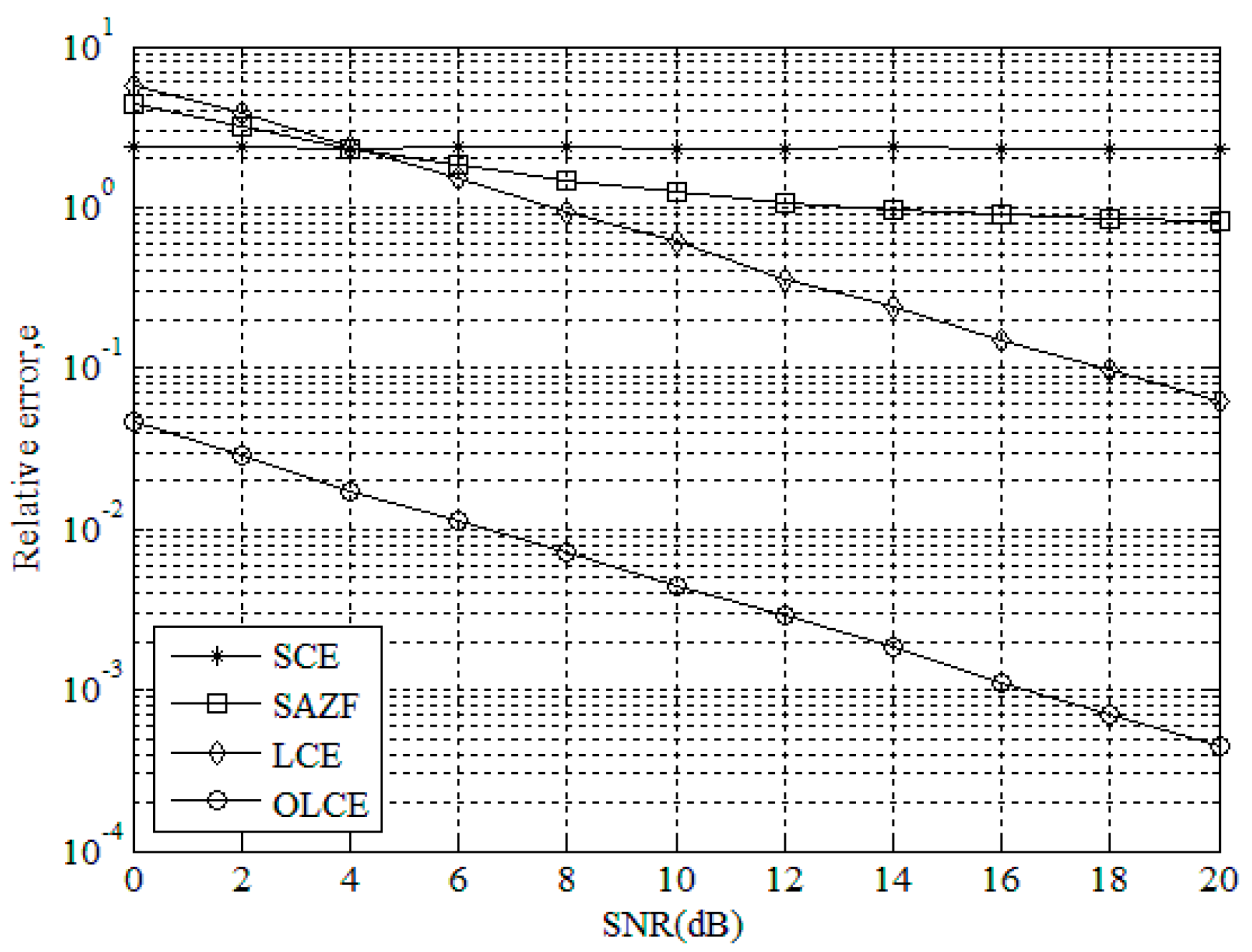
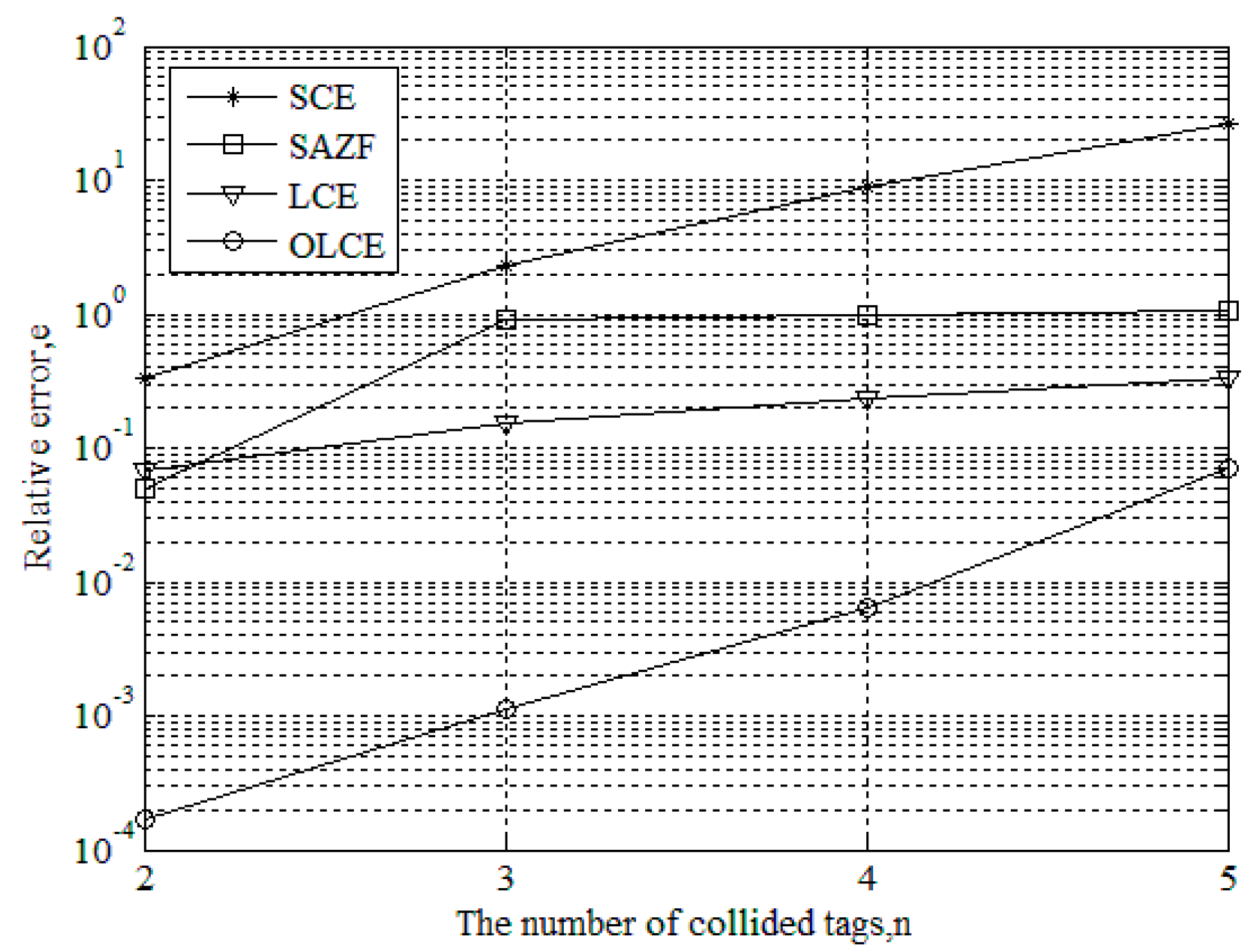
3.2. Estimation Error
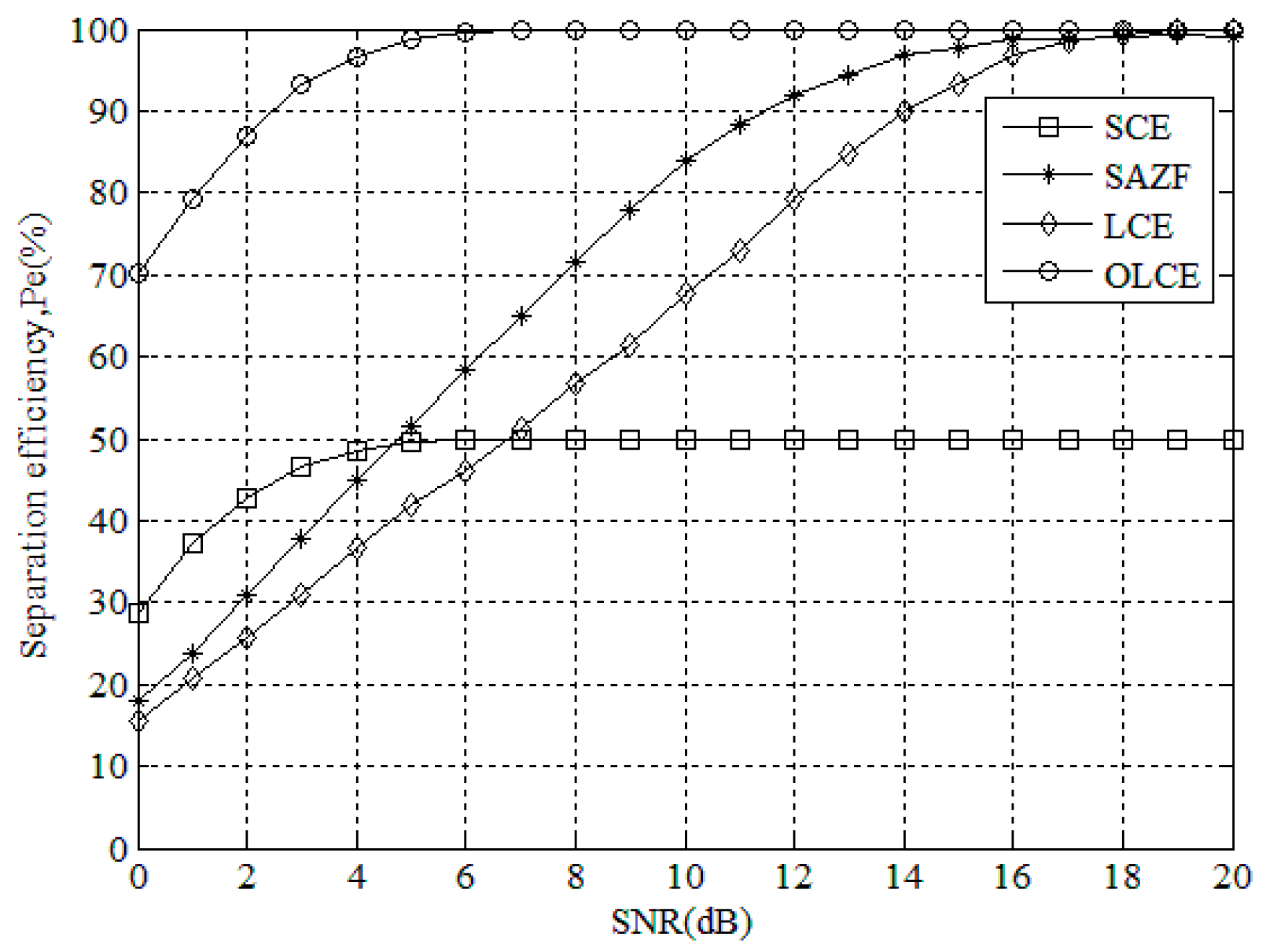
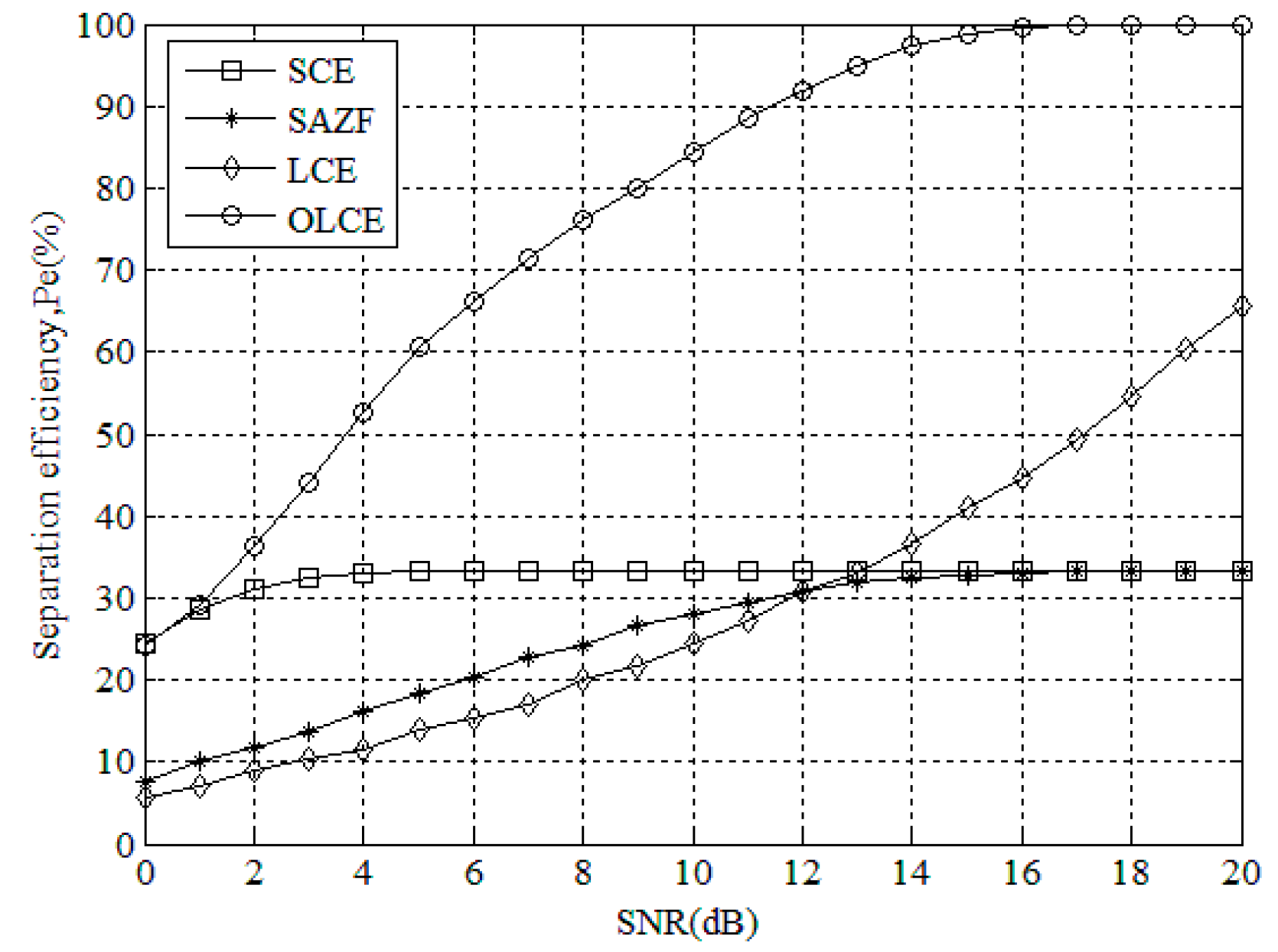
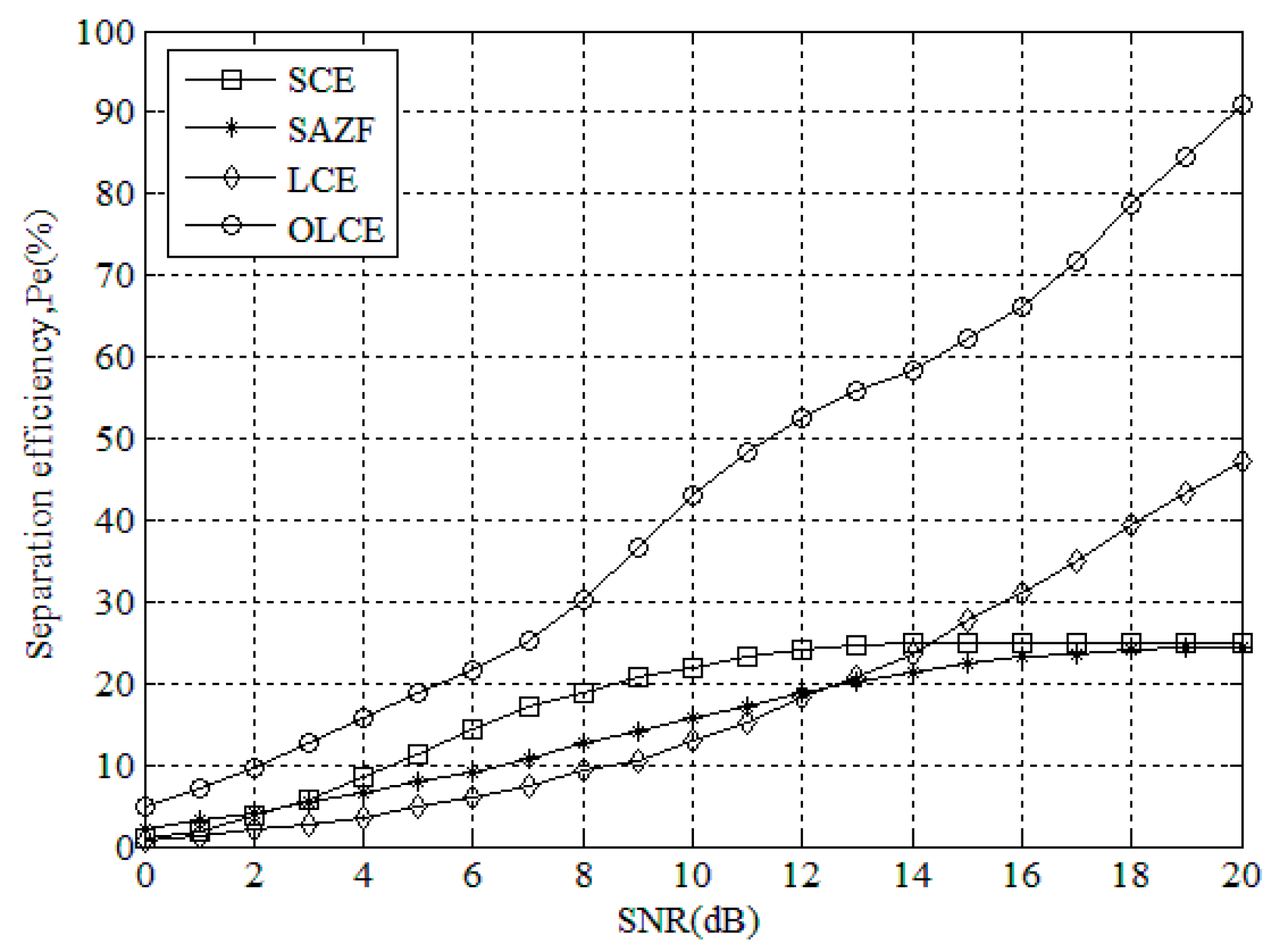
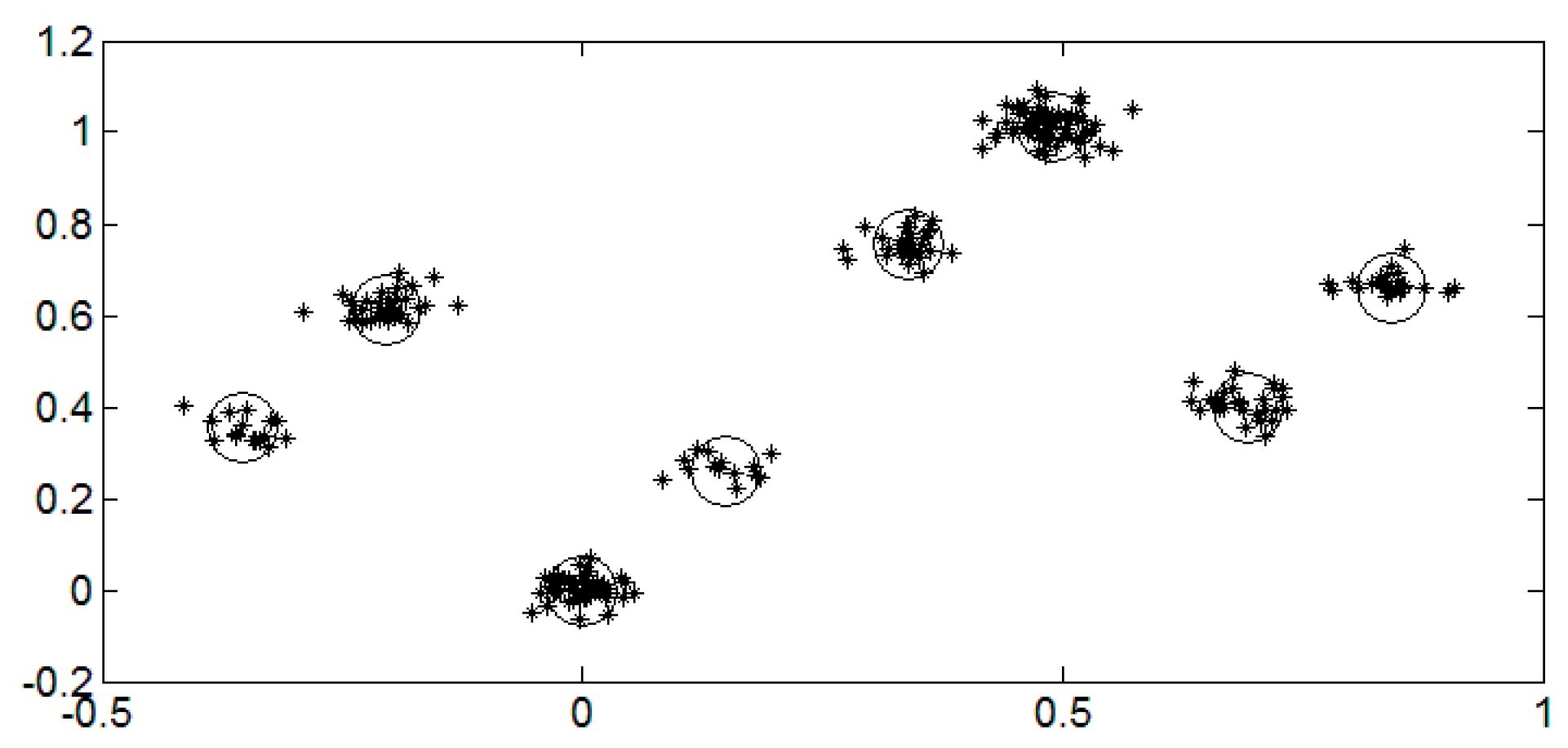
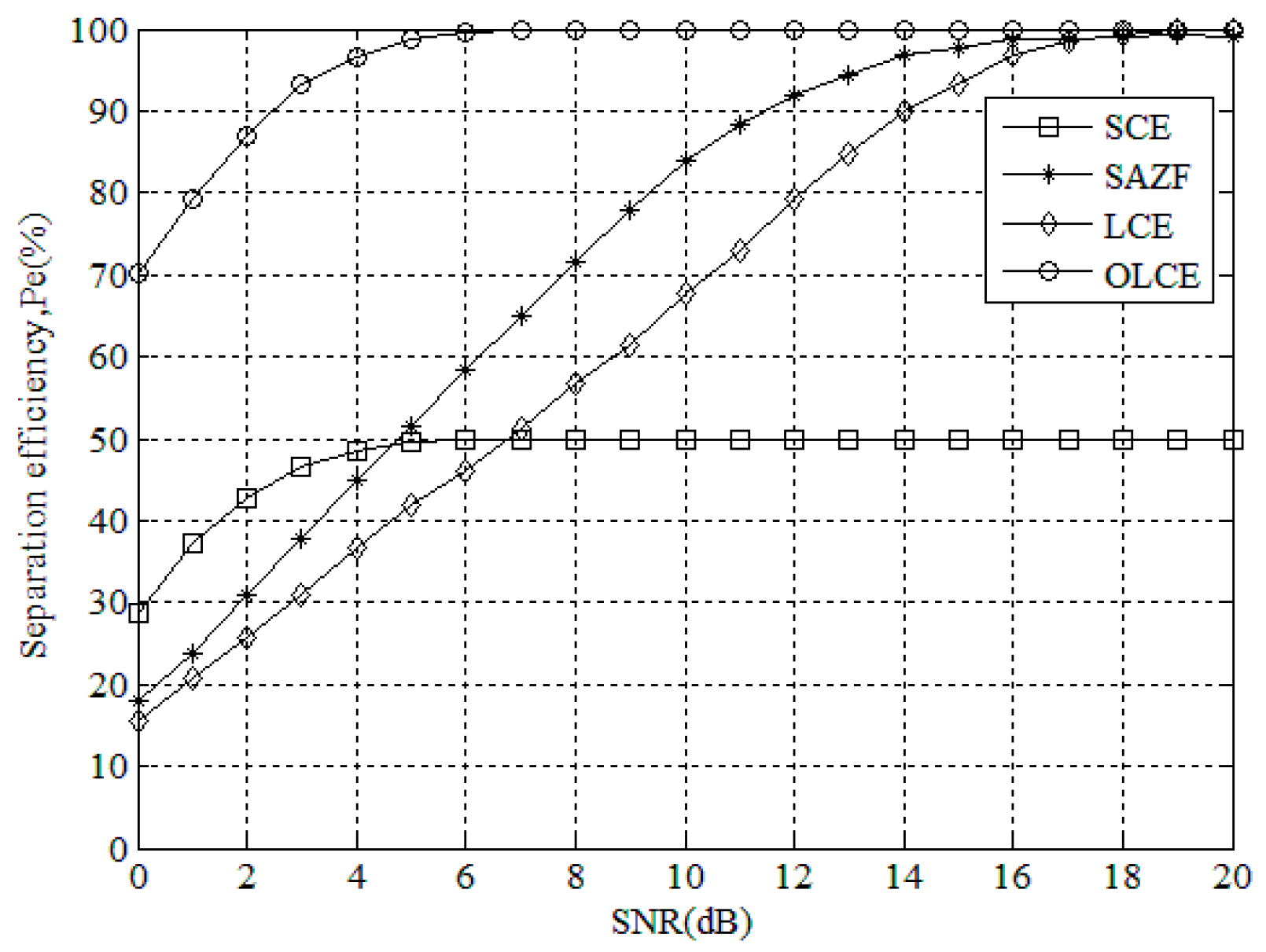
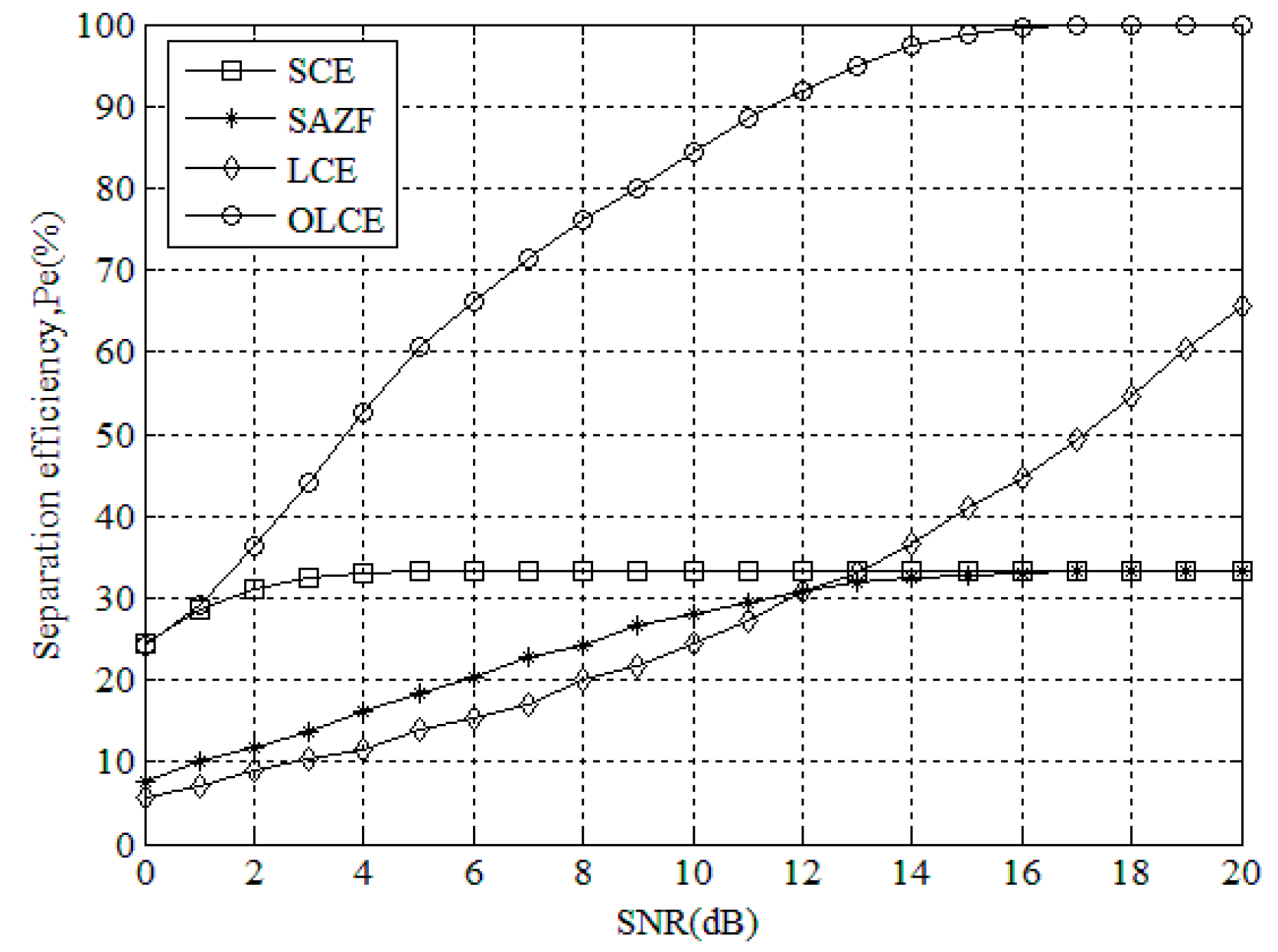
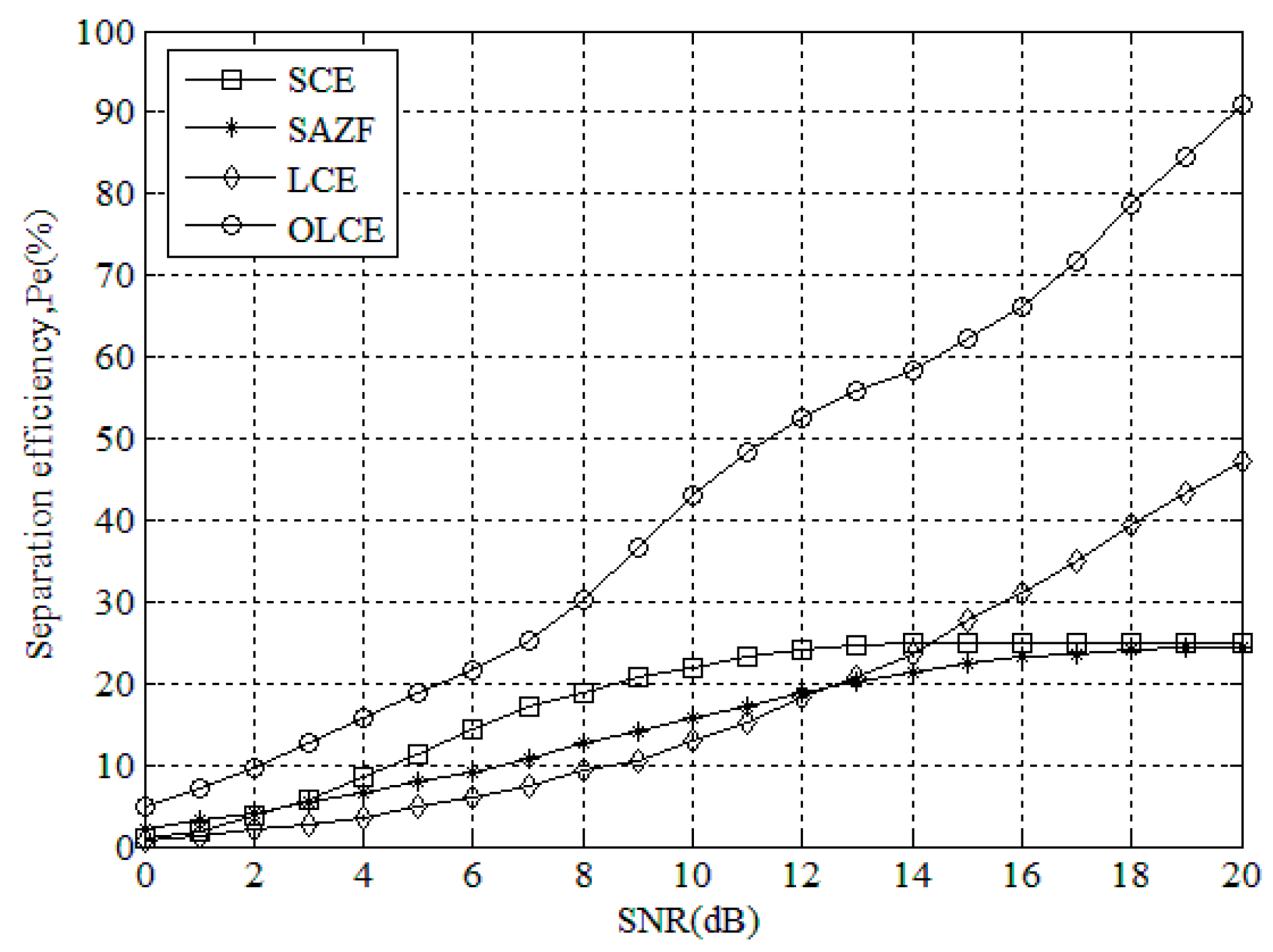
3.3. Separation Efficiency
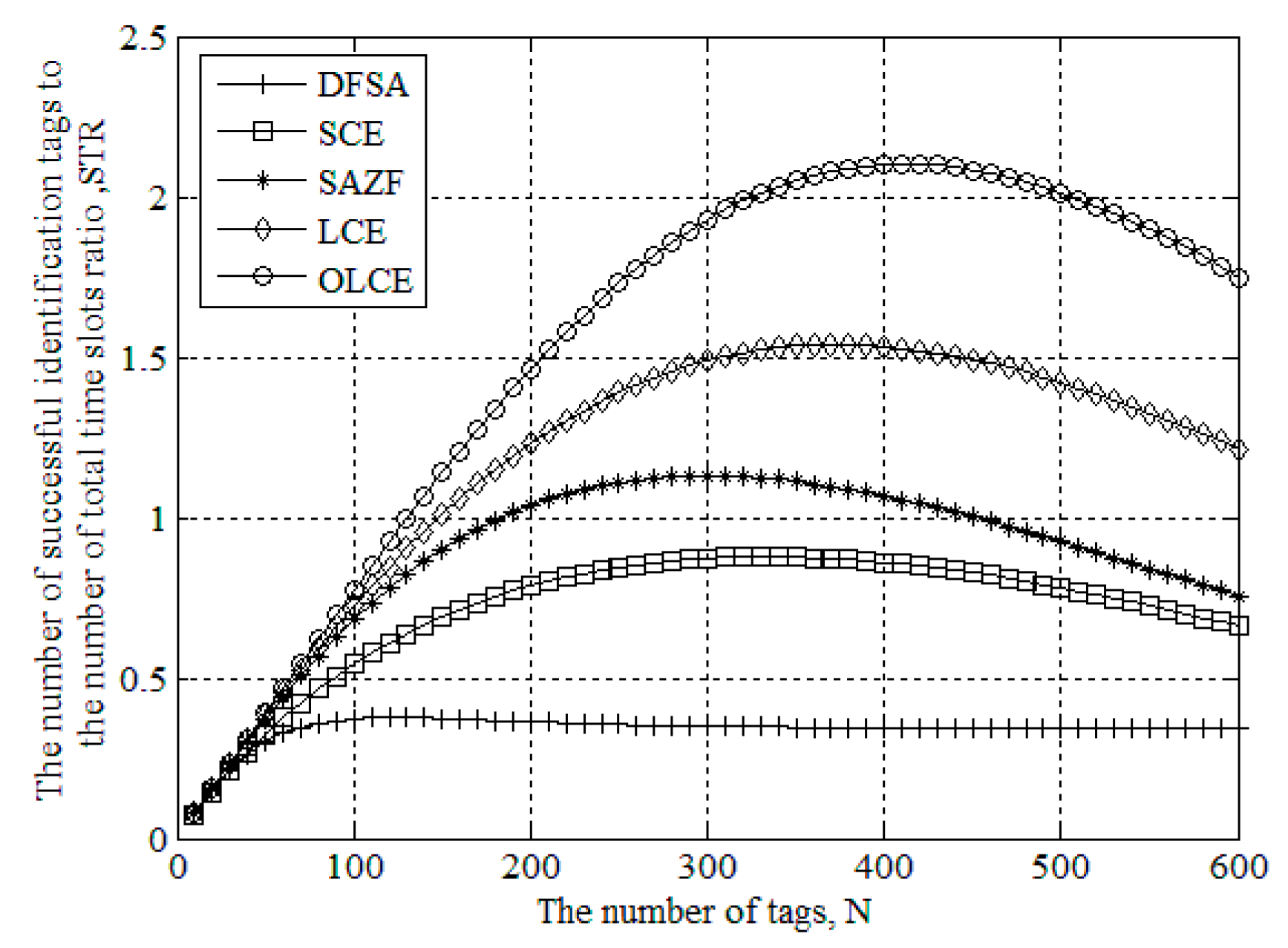
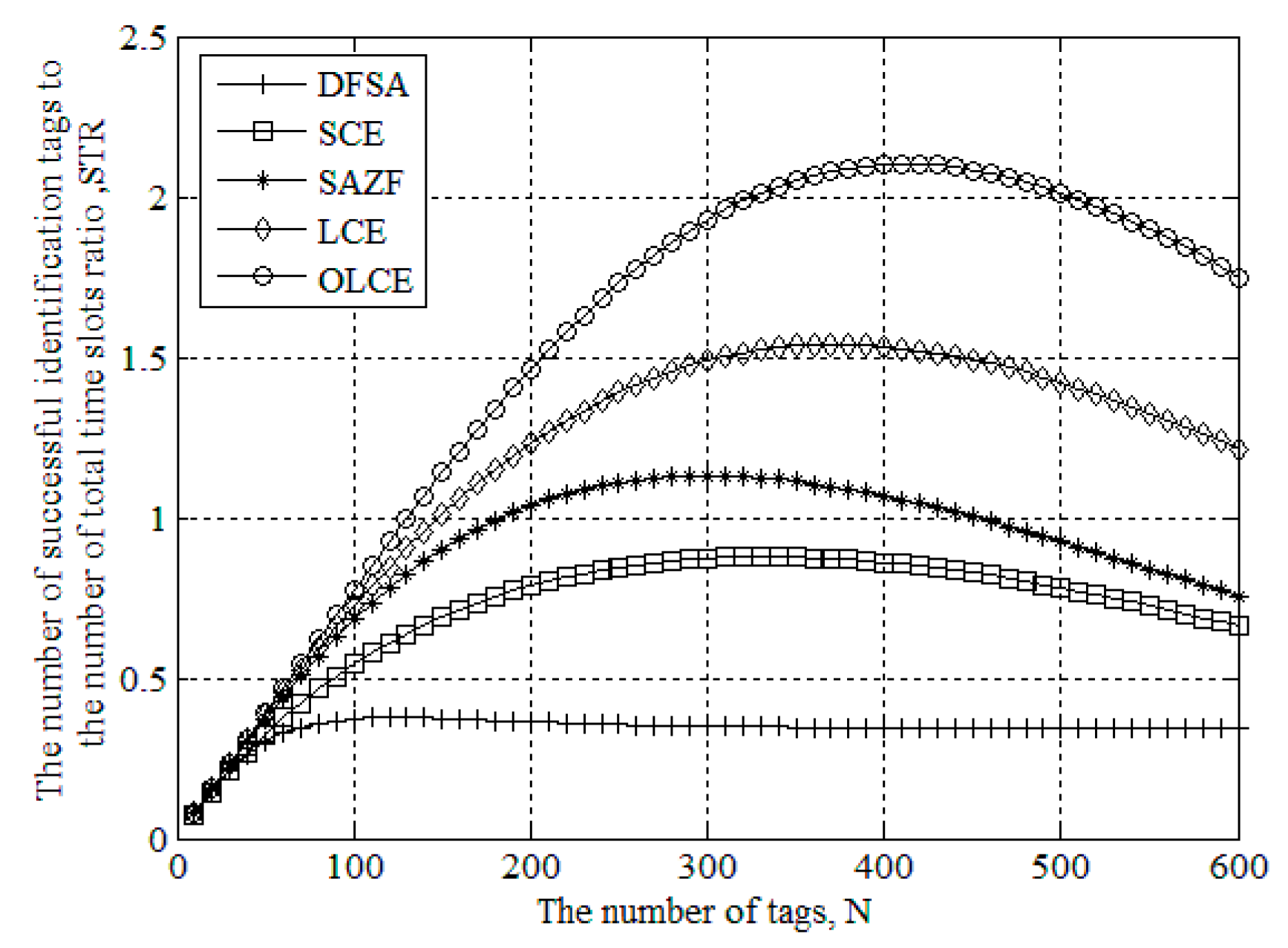
3.4. STR Performance
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Finkenzeller, K.; Müller, D. RFID Handbook: Fundamentals and Applications in Contactless Smart Cards, Radio Frequency Identification and Near-Field Communication; Wiley: New York, NY, USA, 2010. [Google Scholar]
- Klair, D.K.; Chin, K.W.; Raad, R. A survey and tutorial of RFID anti-collision protocols. IEEE Commun. Surv. Tutor. 2010, 12, 400–421. [Google Scholar] [CrossRef]
- Wu, H.; Zeng, Y.; Feng, J.; Gu, Y. Binary tree slotted ALOHA for passive RFID tag anticollision. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 19–31. [Google Scholar] [CrossRef]
- Zhang, L.; Xiang, W.; Tang, X. An adaptive anti-collision protocol for large-scale RFID tag identification. IEEE Wirel. Commun. Lett. 2014, 3, 601–604. [Google Scholar] [CrossRef]
- Shao, M.; Jin, X.; Jin, L. An improved dynamic adaptive multi-tree search anti-collision algorithm based on RFID. In Proceedings of the International Conference on Data Science and Advanced Analytics, Shanghai, China, 30 October–1 November 2014; pp. 72–75.
- Lai, Y.; Hsiao, L. General binary tree protocol for coping with the capture effect in RFID tag identification. IEEE Commun. Lett. 2010, 14, 208–210. [Google Scholar] [CrossRef]
- Wu, H.; Zeng, Y. Bayesian tag estimate and optimal frame length for anti-collision aloha RFID system. IEEE Trans. Autom. Sci. Eng. 2010, 7, 963–969. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Y. An improved dynamic framed slotted aloha anti-collision algorithm based on estimation method for RFID systems. In Proceedings of the IEEE International Conference on RFID, San Diego, CA, USA, 15–17 April 2015; pp. 1–8.
- Zhang, L.; Xiang, W. An energy- and time-efficient M-ary detecting tree RFID MAC protocol. In Proceedings of the IEEE International Conference on Communications, London, UK, 8–12 June 2015; pp. 2882–2887.
- Shen, D.; Woo, G.; Reed, D.P.; Lippman, A.B.; Wang, J. Separation of multiple passive RFID signals using software defined radio. In Proceedings of the IEEE International Conference on RFID, Orlando, FL, USA, 27–28 April 2009; pp. 139–146.
- Angerer, C.; Langwieser, R.; Rupp, M. RFID reader receivers for physical layer collision recovery. IEEE Trans. Commun. 2010, 58, 3526–3537. [Google Scholar] [CrossRef]
- Fyhn, K.; Jacobsen, R.M.; Popovski, P.; Scaglione, A.; Larsen, T. Multipacket reception of passive UHF RFID tags: a communication theoretic approach. IEEE Trans. Signal Process. 2011, 59, 4225–4237. [Google Scholar]
- Duan, H.; Wu, H.; Zeng, Y. Channel estimation for recovery of UHF RFID tag collision on physical layer. In Proceedings of the International Conference on Computer, Information and Telecommunication Systems, Gijon, Spain, 15–17 July 2015; pp. 1–5.
- Bletsas, A.; Kimionis, J.; Dimitriou, A.G.; Karystinos, G.N. Single-antenna coherent detection of collided FM0 RFID signals. IEEE Trans. Commun. 2012, 60, 756–766. [Google Scholar] [CrossRef]
- Benbaghdad, M.; Fergani, B.; Tedjini, S.; Perret, E. Simulation and measurement of collision signal in passive UHF RFID system and edge transition anti-collision algorithm. In Proceedings of the IEEE RFID Technology and Applications Conference, Tampere, Finland, 8–9 September 2014; pp. 277–282.
- EPCglobal. Radio-Frequency Identification Protocols Class-1 Generation-2 UHF RFID Protocol for Communications at 860 MHz–960 MHz Version 1.2.0. 2008. Available online: http://www.gs1.org/sites/default/files/docs/epc/uhfc1g2_1_2_0-standard-20080511.pdf (accessed on 25 March 2016).
- José, F.S.; Almudena, R.; Fernando, M.M.; Luis, F.C.V.; Alberto, J.P.; Miguel, A.C. Passive UHF RFID Tag with Multiple Sensing Capabilities. Sensors 2015, 15, 26769–26782. [Google Scholar]
- Ricciato, F.; Castiglione, P. Pseudo-random Aloha for Enhanced Collision-recovery in RFID. IEEE Commun. Lett. 2013, 17, 608–611. [Google Scholar] [CrossRef]
- International Standard ISO/IEC 18000-6. Information Technology Radio Frequency Identification (RFID) for Item Management Part 6: Parameters for Air Interface Communications at 860 MHz to 960 MHz. Available online: http://www.iso.org/iso/catalogue_detail.htm?csnumber=46149 (accessed on 25 March 2016).
- Carroccia, G.; Maselli, G. Inducing collisions for fast RFID tag identification. IEEE Commun. Lett. 2015, 19, 1838–1841. [Google Scholar] [CrossRef]
- Barhumi, I.; Leus, G.; Moonen, M. Optimal Training Design for MIMO OFDM Systems in Mobile Wireless Channels. IEEE Trans. Signal Process. 2003, 51, 1615–1624. [Google Scholar] [CrossRef]

© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, H.; Wu, H.; Zeng, Y.; Chen, Y. LS Channel Estimation and Signal Separation for UHF RFID Tag Collision Recovery on the Physical Layer. Sensors 2016, 16, 442. https://doi.org/10.3390/s16040442
Duan H, Wu H, Zeng Y, Chen Y. LS Channel Estimation and Signal Separation for UHF RFID Tag Collision Recovery on the Physical Layer. Sensors. 2016; 16(4):442. https://doi.org/10.3390/s16040442
Chicago/Turabian StyleDuan, Hanjun, Haifeng Wu, Yu Zeng, and Yuebin Chen. 2016. "LS Channel Estimation and Signal Separation for UHF RFID Tag Collision Recovery on the Physical Layer" Sensors 16, no. 4: 442. https://doi.org/10.3390/s16040442
APA StyleDuan, H., Wu, H., Zeng, Y., & Chen, Y. (2016). LS Channel Estimation and Signal Separation for UHF RFID Tag Collision Recovery on the Physical Layer. Sensors, 16(4), 442. https://doi.org/10.3390/s16040442