
A Novel Digital Closed Loop MEMS Accelerometer Utilizing a Charge Pump

Abstract
:1. Introduction
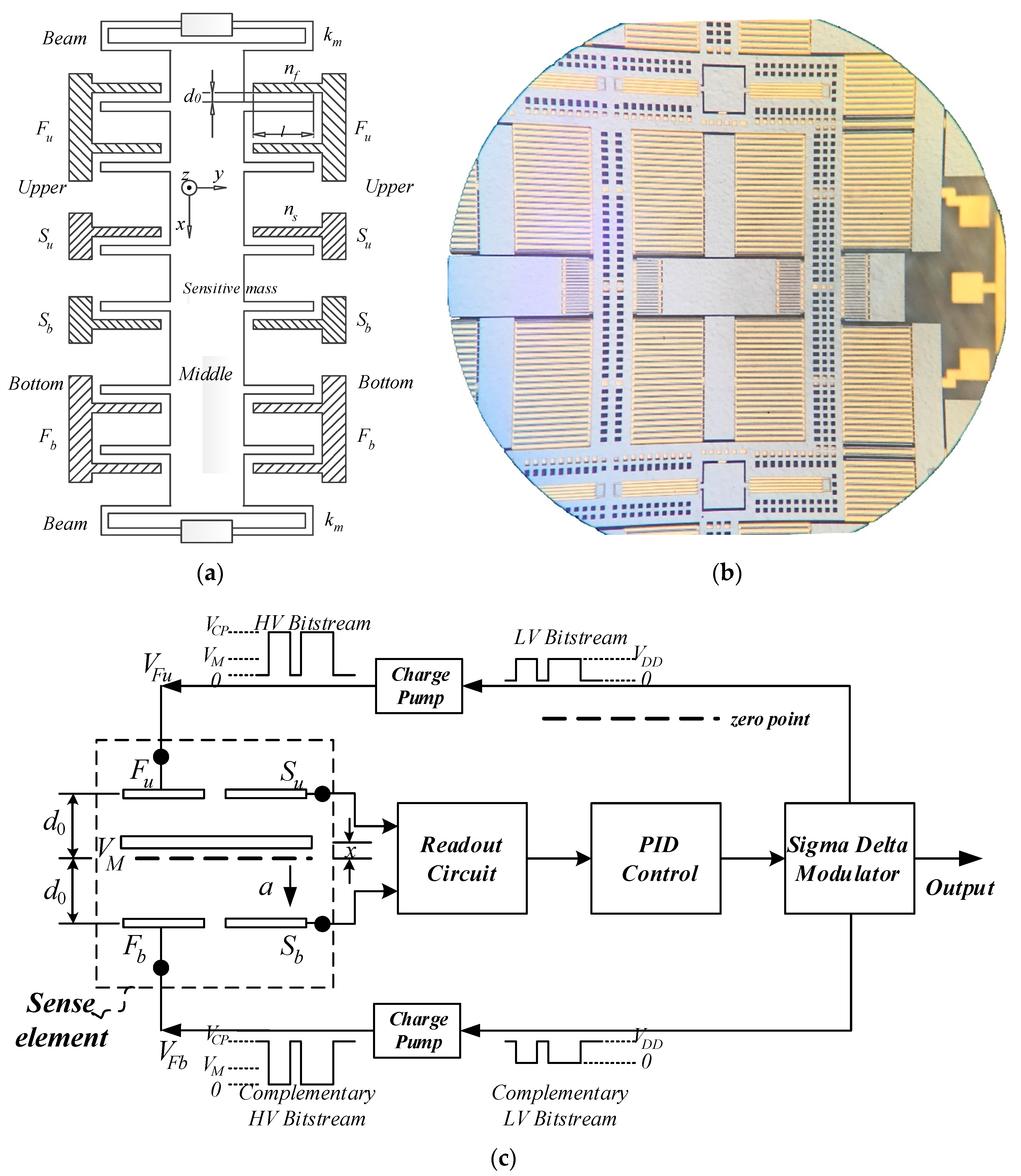
2. MEMS Accelerometer Utilizing Charge Pump
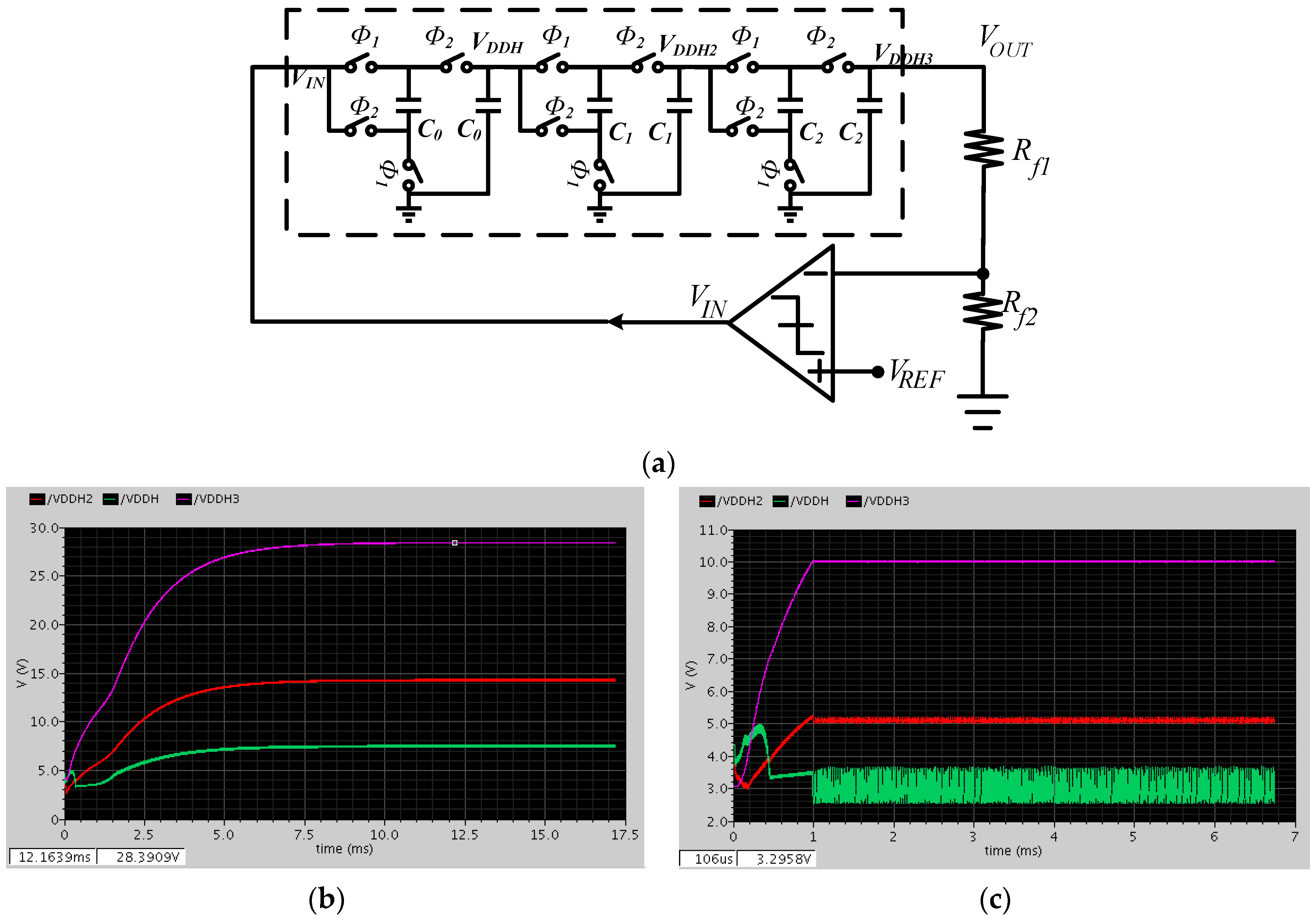
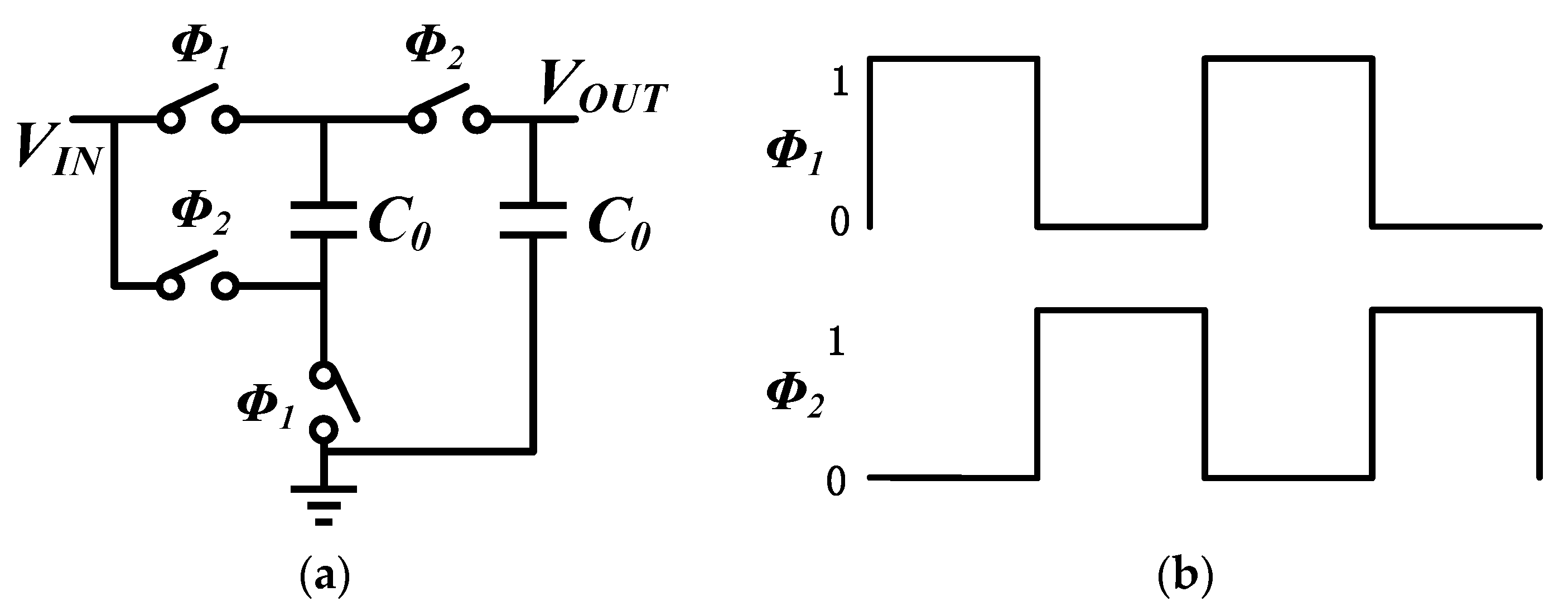
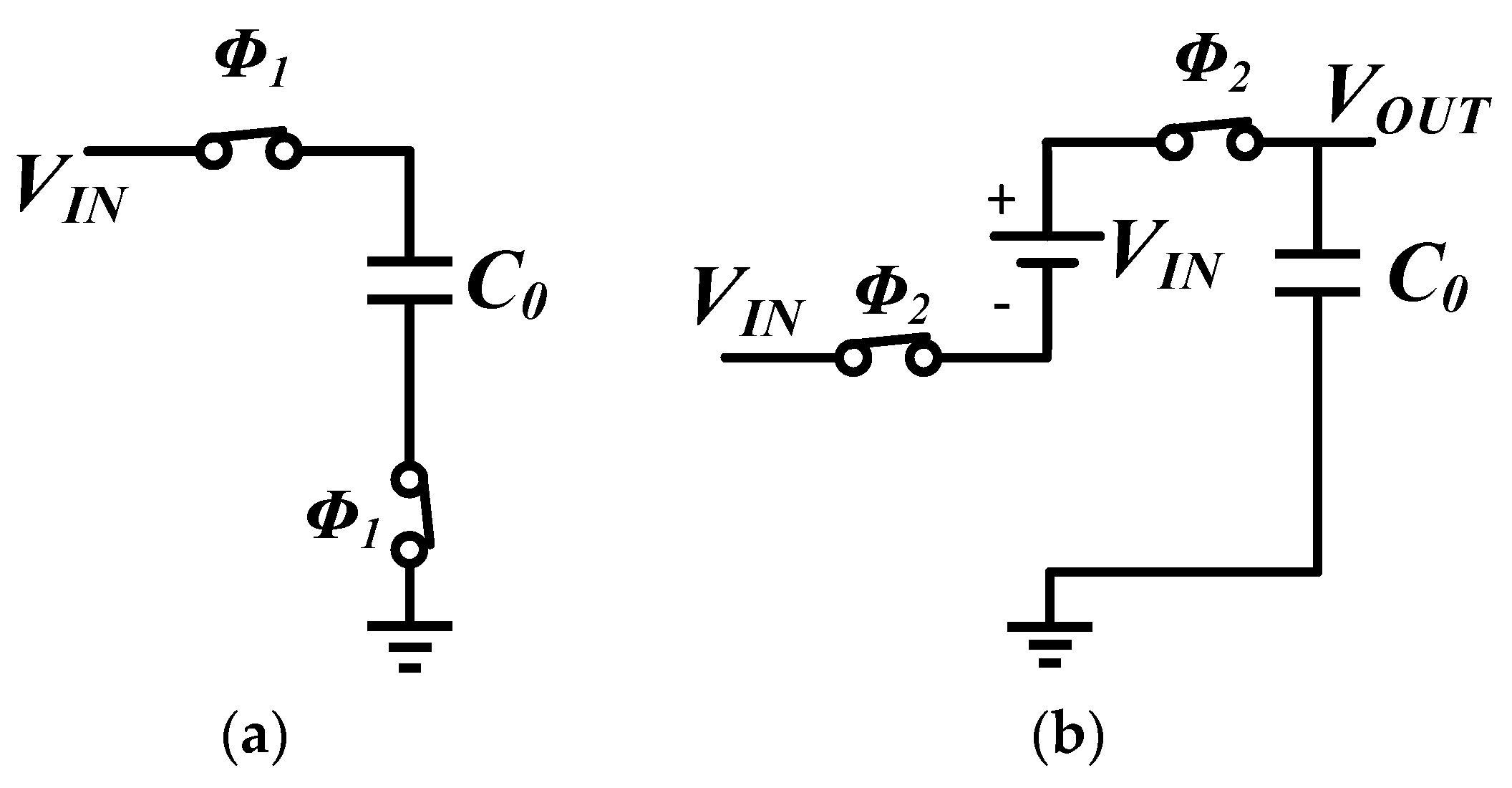
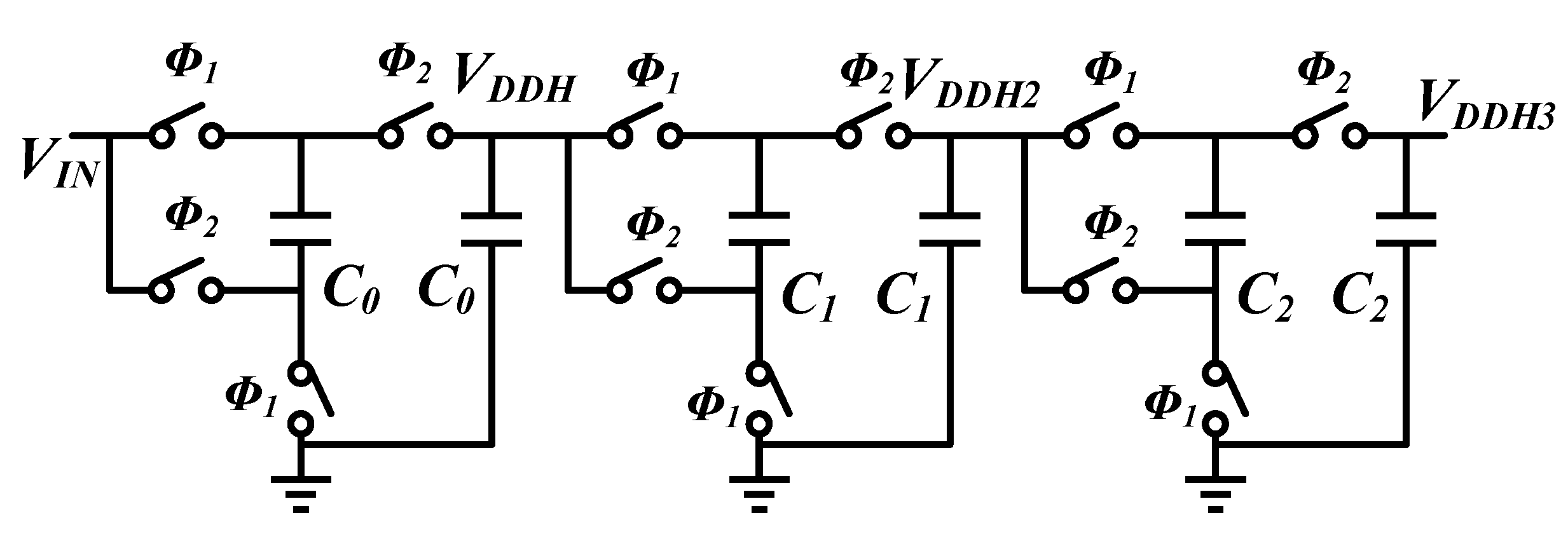
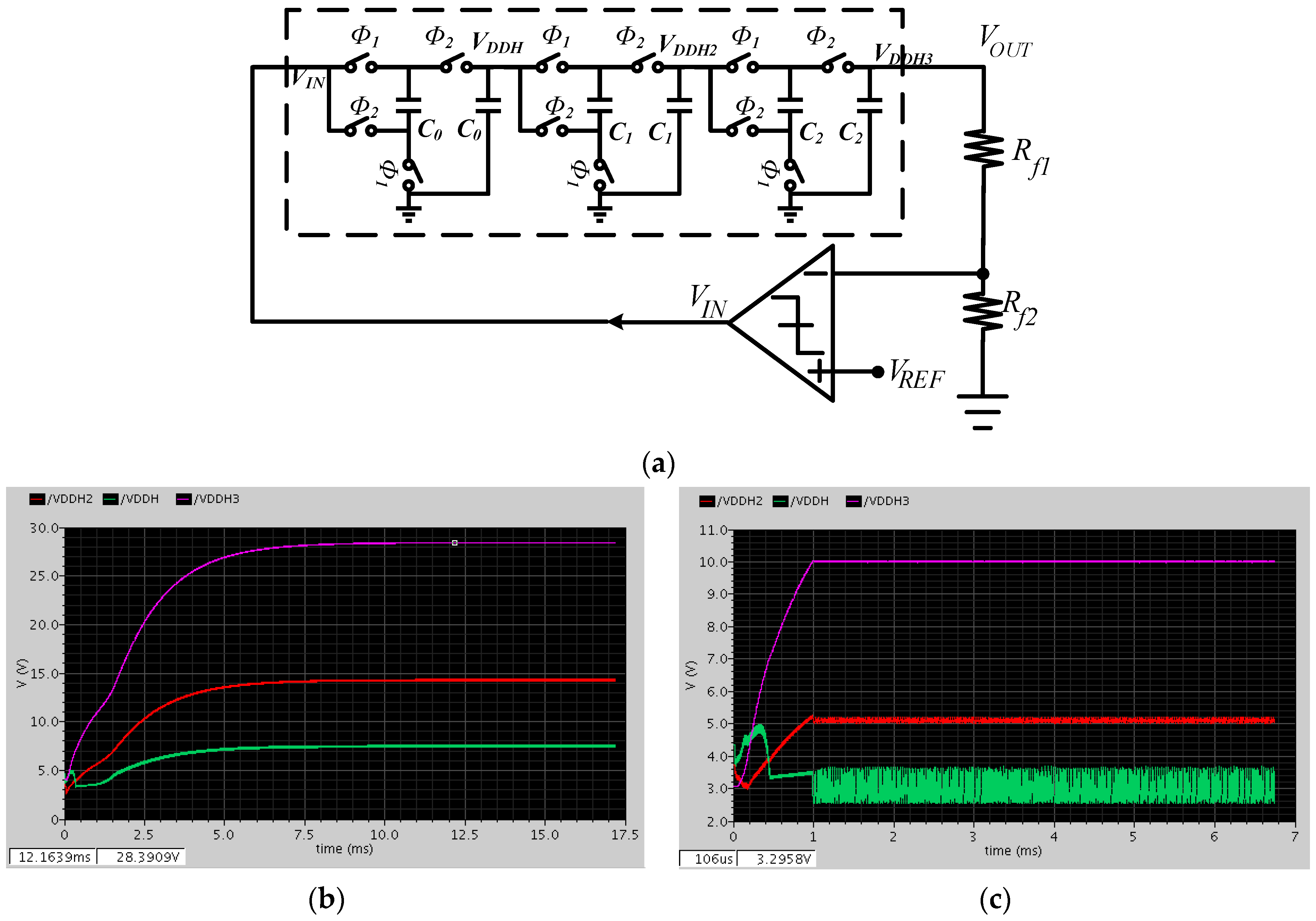
3. Charge Pump System
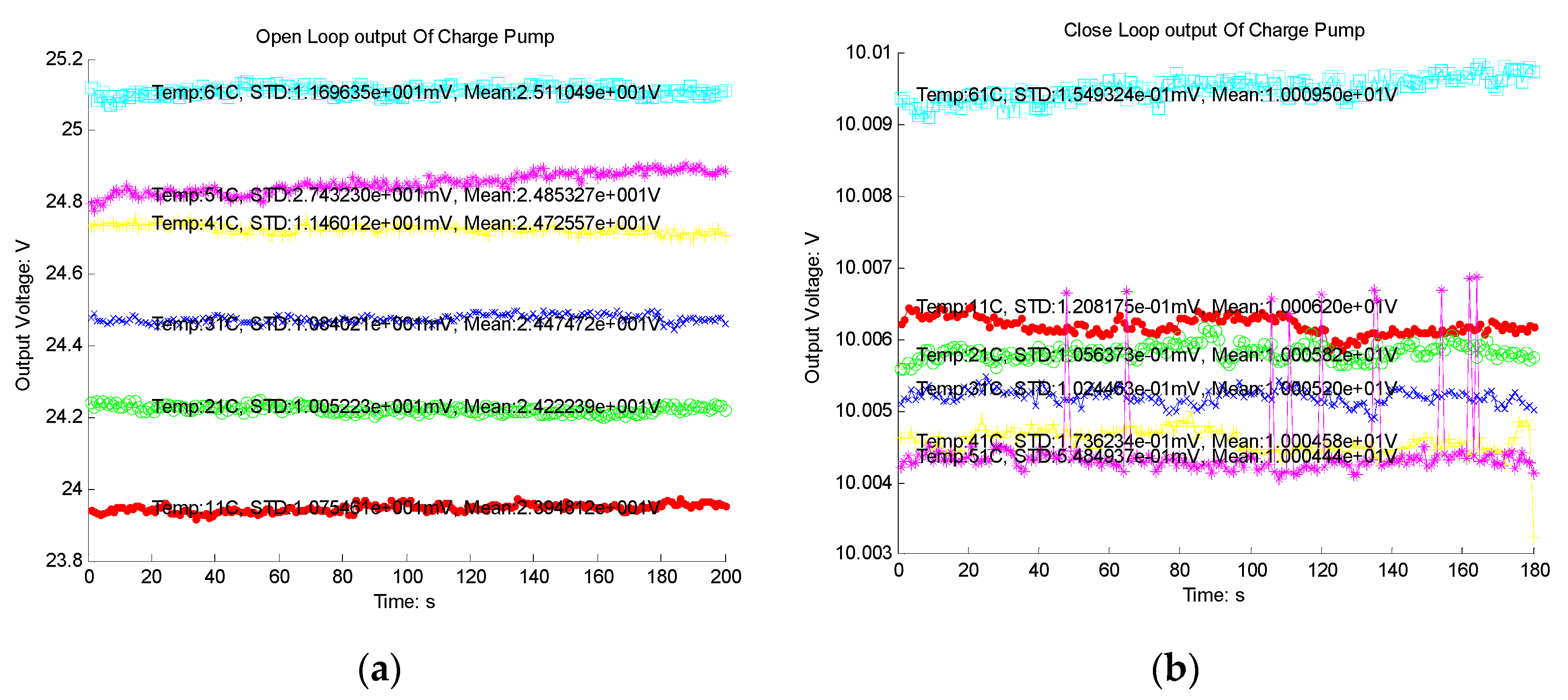
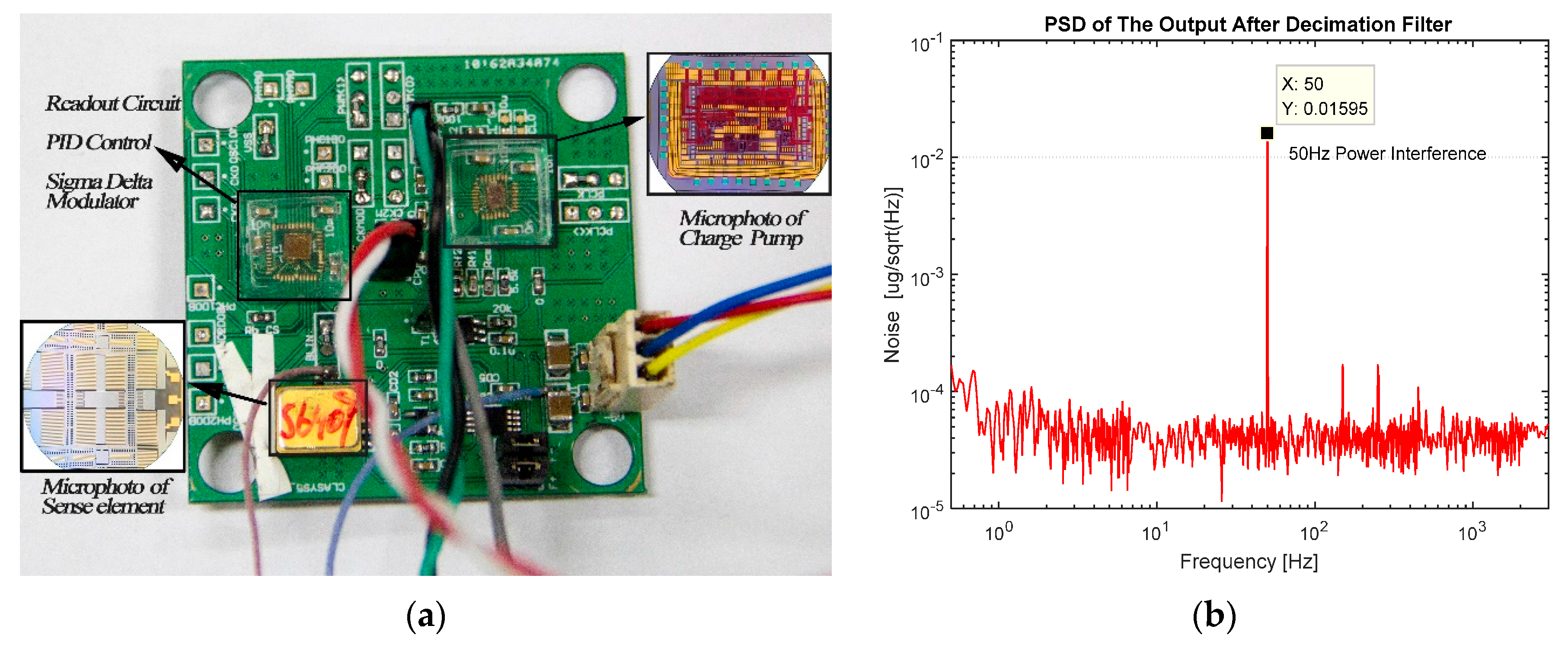
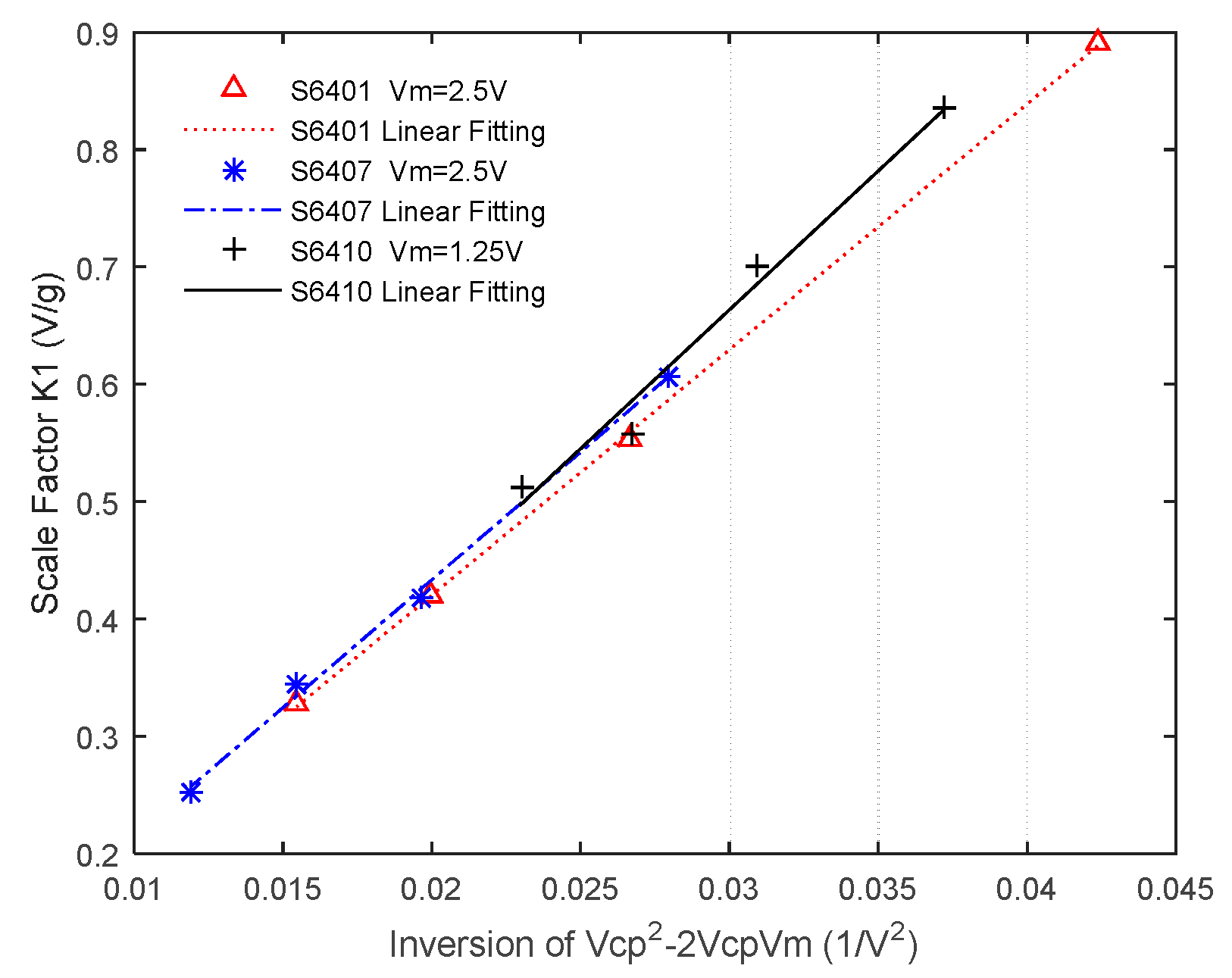
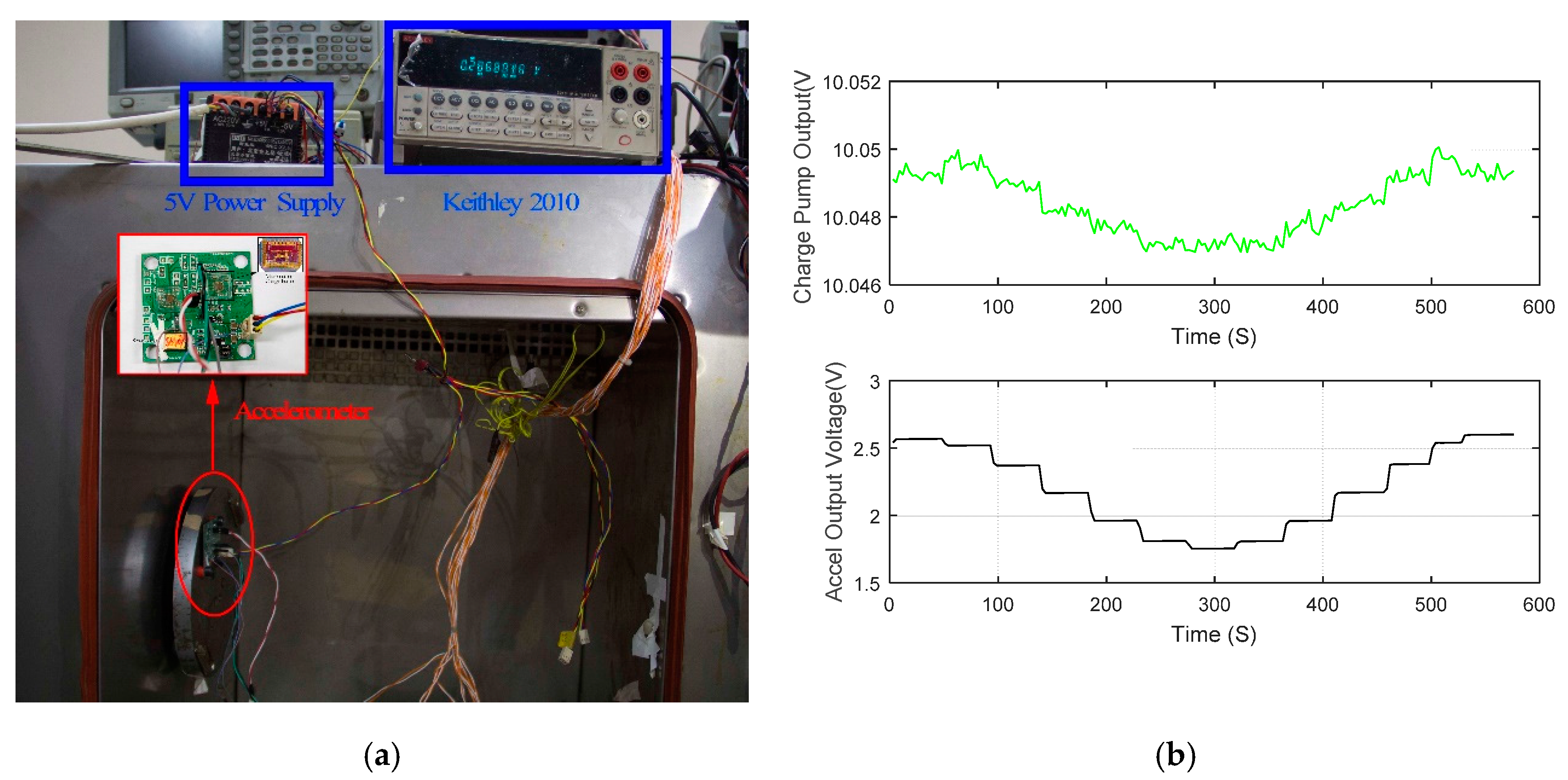
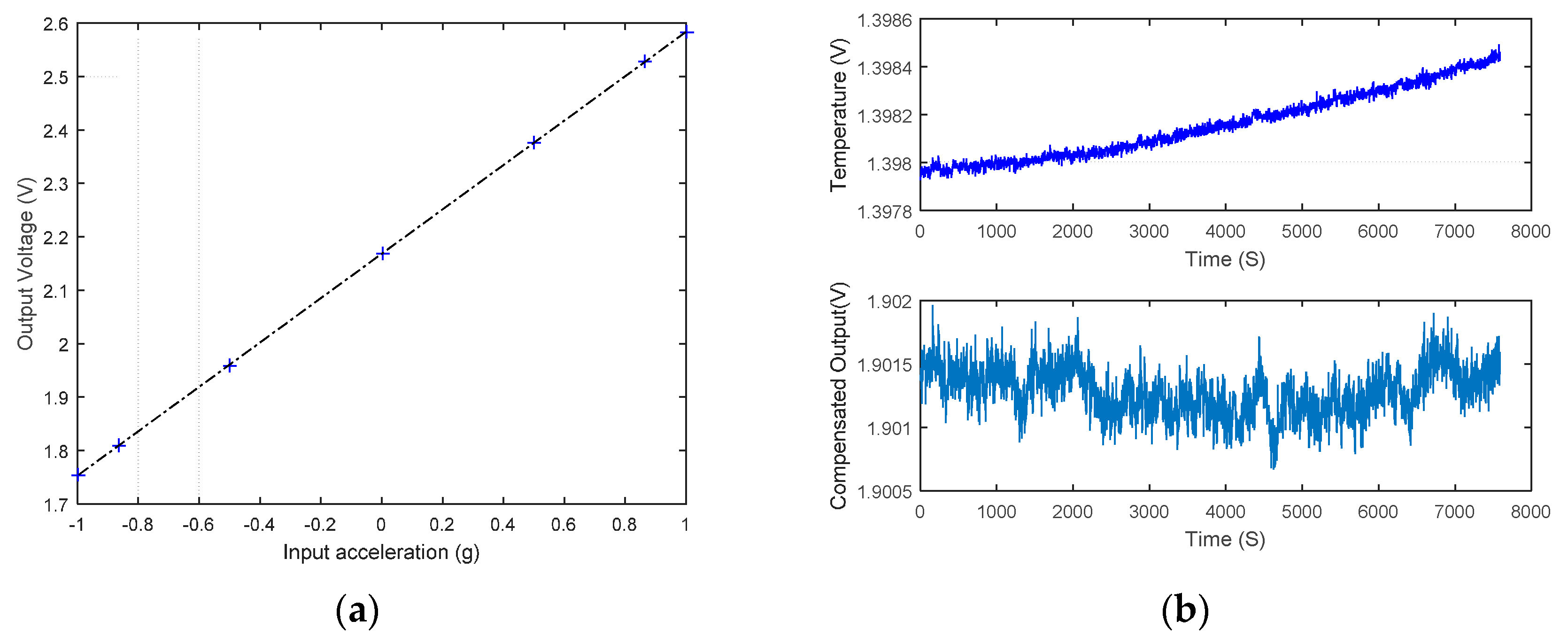
4. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shaeffer, D.K. MEMS inertial sensors: A tutorial overview. IEEE Commun. Mag. 2013, 51, 100–109. [Google Scholar] [CrossRef]
- Lane, N.D.; Miluzzo, E.; Hong, L.; Peebles, D.; Choudhury, T.; Campbell, A.T. A survey of mobile phone sensing. IEEE Commun. Mag. 2010, 48, 140–150. [Google Scholar] [CrossRef]
- Raman, J.; Rombouts, P.; Weyten, L. An Unconstrained Architecture for Systematic Design of Higher Order Sigma Delta Force-Feedback Loops. IEEE Trans. Circuits Syst. I Regul. 2008, 55, 1601–1614. [Google Scholar] [CrossRef]
- Almutairi, B.; Kraft, M. Experimental study of single loop sigma-delta and multi stage noise shaping (MASH) modulators for MEMS accelerometer. IEEE Sens. 2011. [Google Scholar] [CrossRef]
- Chen, F.; Yuan, W.; Chang, H.; Zeimpekis, I.; Kraft, M. Low noise vacuum MEMS closed-loop accelerometer using sixth-order multi-feedback loops and local resonator sigma delta modulator. In Proceedings of the IEEE 27th International Conference on Micro Electro Mechanical Systems, San Francisco, CA, USA, 26–30 January 2014; pp. 761–764.
- Zwahlen, P.; Dong, Y.; Nguyen, A.M.; Rudolf, F.; Stauffer, J.M.; Ullah, P.; Ragot, V. Breakthrough in high performance inertial navigation grade Sigma-Delta MEMS accelerometer, Position Location and Navigation Symposium (PLANS). IEEE/ION 2012. [Google Scholar] [CrossRef]
- Ullah, P.; Ragot, V.; Zwahlen, P.; Rudolf, F. A new high performance sigma-delta MEMS accelerometer for inertial navigation. In Proceedings of the IEEE Inertial Sensors and Systems Symposium (ISS), Karlsruhe, Germany, 22–23 September 2015; pp. 1–13.
- Pastre, M.; Kayal, M.; Schmid, H.; Zwahlen, P.; Dong, Y.; Nguyen, A.-M. A navigation-grade MEMS accelerometer based on a versatile front end. In Proceedings of the 37th Annual Conference on IEEE Industrial Electronics Society, Melbourne, VIC, Australia, 7–10 November 2011; pp. 4038–4043.
- Kulah, H.; Chae, J.; Yazdi, N.; Najafi, K. Noise analysis and characterization of asigma-delta capacitive microaccelerometer. IEEE J. Solid-State Circuits 2006, 41, 352–361. [Google Scholar] [CrossRef]
- Sonmez, U.; Kulah, H.; Akin, T. A fourth order unconstrained ΣΔ capacitive accelerometer. In Proceedings of the 16th International Solid-State Sensors, Actuators and Microsystems Conference (TRANSDUCERS), Beijing, China, 5–9 June 2011; pp. 707–710.
- Xu, H.; Liu, X.; Yin, L. A Closed-Loop ΣΔ Interface for a High-Q Micromechanical Capacitive Accelerometer with 200 ng/√Hz Input Noise Density. IEEE J. Solid-State Circuits 2015, 50, 2101–2112. [Google Scholar] [CrossRef]
- Ye, Z.; Yang, H.; Yin, T.; Huang, G.; Liu, F. High-Performance Closed-Loop Interface Circuit for High-Q Capacitive Microaccelerometers. IEEE J. Sens. 2013, 13, 1425–1433. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, G.; Dong, J.; Zhao, C. Interface circuit for capacitive microaccelerometer. In Proceedings of the 51st Midwest Symposium on Circuits and Systems, Knoxville, TN, USA, 10–13 August 2008; pp. 654–657.
- LIS3LV02DL. Available online: http://goo.gl/D1EbKy (accessed on 14 January 2016).
- ADXL103_203. Available online: http://goo.gl/LyjE7N (accessed on 14 January 2016).
- MMA685X. Available online: http://goo.gl/q93Sj8 (accessed on 14 January 2016).
- MXD6235M. Available online: http://goo.gl/0IK4EB (accessed on 14 January 2016).
- MS9000D. Available online: http://goo.gl/F9SvKs (accessed on 14 January 2016).
- Makowski, M.S.; Maksimovic, D. Performance limits of switched-capacitor DC-DC converters. In Proceedings of the 26th Annual IEEE Power Electronics Specialists Conference, Atlanta, GA, USA, 18–22 June 1995; Volume 2, pp. 1215–1221.
- Wang, C.-C.; Wu, J.-C. Efficiency improvement in charge pump circuits. IEEE J. Solid-State 1997, 32, 852–860. [Google Scholar] [CrossRef]
- Dalal, M. Low Noise Low Power Interface Circuits and Systems for High Frequency Resonant Micro_Gyroscopes. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2012. [Google Scholar]
- Dong, J. Inertial Instruments: Micromachined Accelerometer; Tsinghua University Press: Beijing, China, 2003. [Google Scholar]
- Liu, L.; Chen, L.; Li, D.; Wang, Z.; Wei, S. A 1.1 mW 87 dB dynamic range audio ΔΣ modulator in 0.18 µm CMOS. In Proceedings of the Asia Pacific Conference on Postgraduate Research in Microelectronics & Electronics, Shanghai, China, 19–21 November 2009; pp. 17–20.
- Norsworthy, S.R.; Schreier, R.; Temes, G.C. (Eds.) Delta-Sigma Data Converters: Theory, Design, and Simulation; IEEE Press: New York, NY, USA, 1997.
- Liu, L. Low Voltage and Low Power Techniques for High Precision Audio Σ∆ Modulator. Ph.D. Thesis, Tsinghua University, Beijing, China, April 2010. [Google Scholar]
- Fan, D.; Liu, Y.; Han, F.; Dong, J. Identification and adjustment of the position and attitude for the electrostatic accelerometer’s proof mass. Sens. Actuators A Phys. 2012, 187, 190–193. [Google Scholar] [CrossRef]
- Dong, J.; Zhao, C.; Xiong, S.; Guo, M. Introduction to Control Engineering; Tsinghua University Press: Beijing, China, 2009. [Google Scholar]
- Allen, P.E.; Holberg Douglas, R. CMOS Analog Circuit Design, 2nd ed.; Oxford University Press: New York, NY, USA, 2002. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Symbol) | Value | Parameter (Symbol) | Value |
|---|---|---|---|
| Sensitive mass (m) | 0.57 mg | Total capacitance (CS0) | 9.66 pF |
| Damping coefficient (b) | Comb overlap length (l) | 300 µm | |
| Stiffness (Km) | 150 N/m | Number of sensing comb fingers () | 188 |
| Comb spacing (d0) | 3.1 µm | Number of feedback comb fingers () | 188 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, Y.; Dong, J.; Chi, B.; Liu, Y. A Novel Digital Closed Loop MEMS Accelerometer Utilizing a Charge Pump. Sensors 2016, 16, 389. https://doi.org/10.3390/s16030389
Chu Y, Dong J, Chi B, Liu Y. A Novel Digital Closed Loop MEMS Accelerometer Utilizing a Charge Pump. Sensors. 2016; 16(3):389. https://doi.org/10.3390/s16030389
Chicago/Turabian StyleChu, Yixing, Jingxin Dong, Baoyong Chi, and Yunfeng Liu. 2016. "A Novel Digital Closed Loop MEMS Accelerometer Utilizing a Charge Pump" Sensors 16, no. 3: 389. https://doi.org/10.3390/s16030389
APA StyleChu, Y., Dong, J., Chi, B., & Liu, Y. (2016). A Novel Digital Closed Loop MEMS Accelerometer Utilizing a Charge Pump. Sensors, 16(3), 389. https://doi.org/10.3390/s16030389