
Validation of Underwater Sensor Package Using Feature Based SLAM

Abstract
:1. Introduction
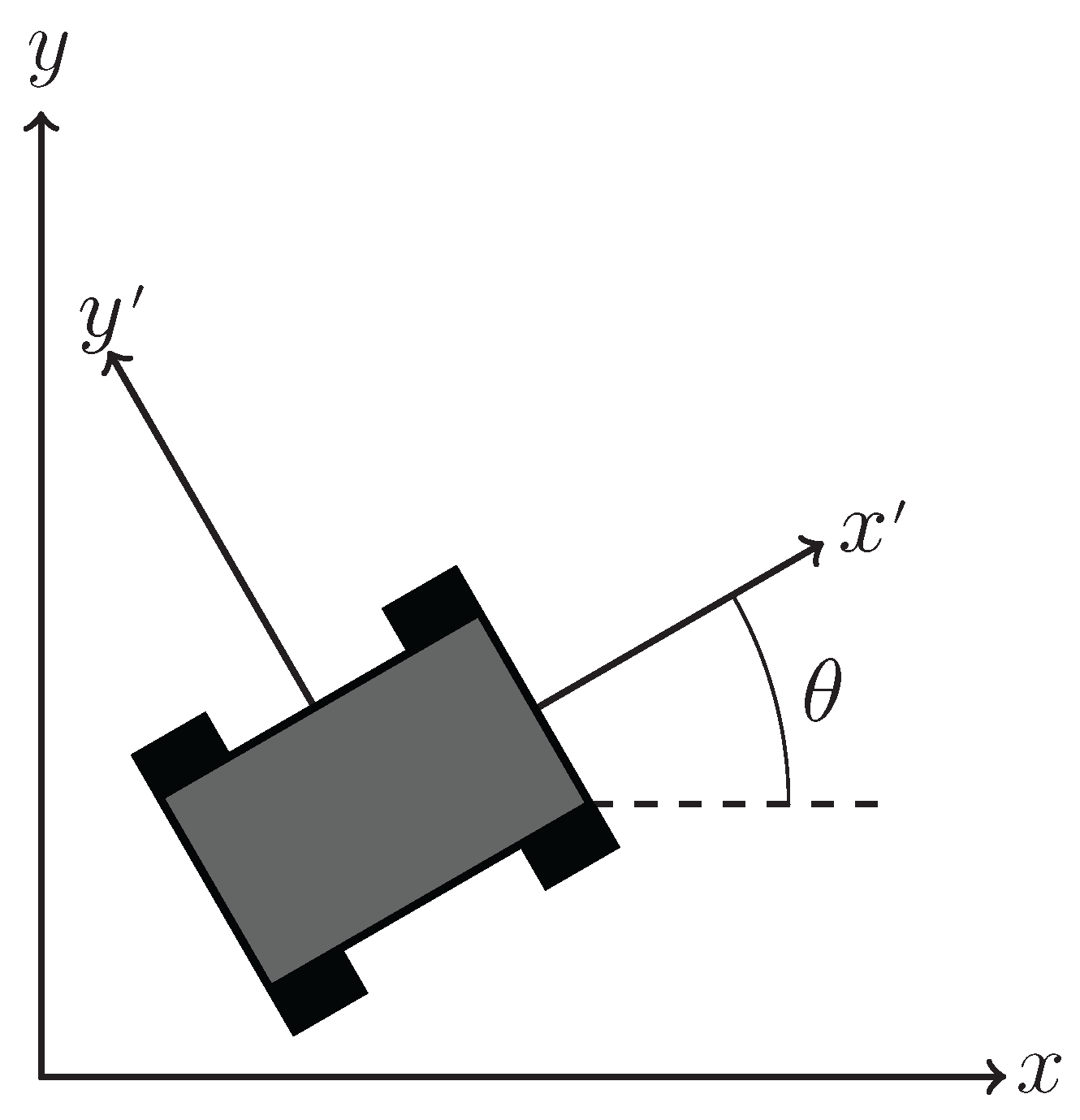
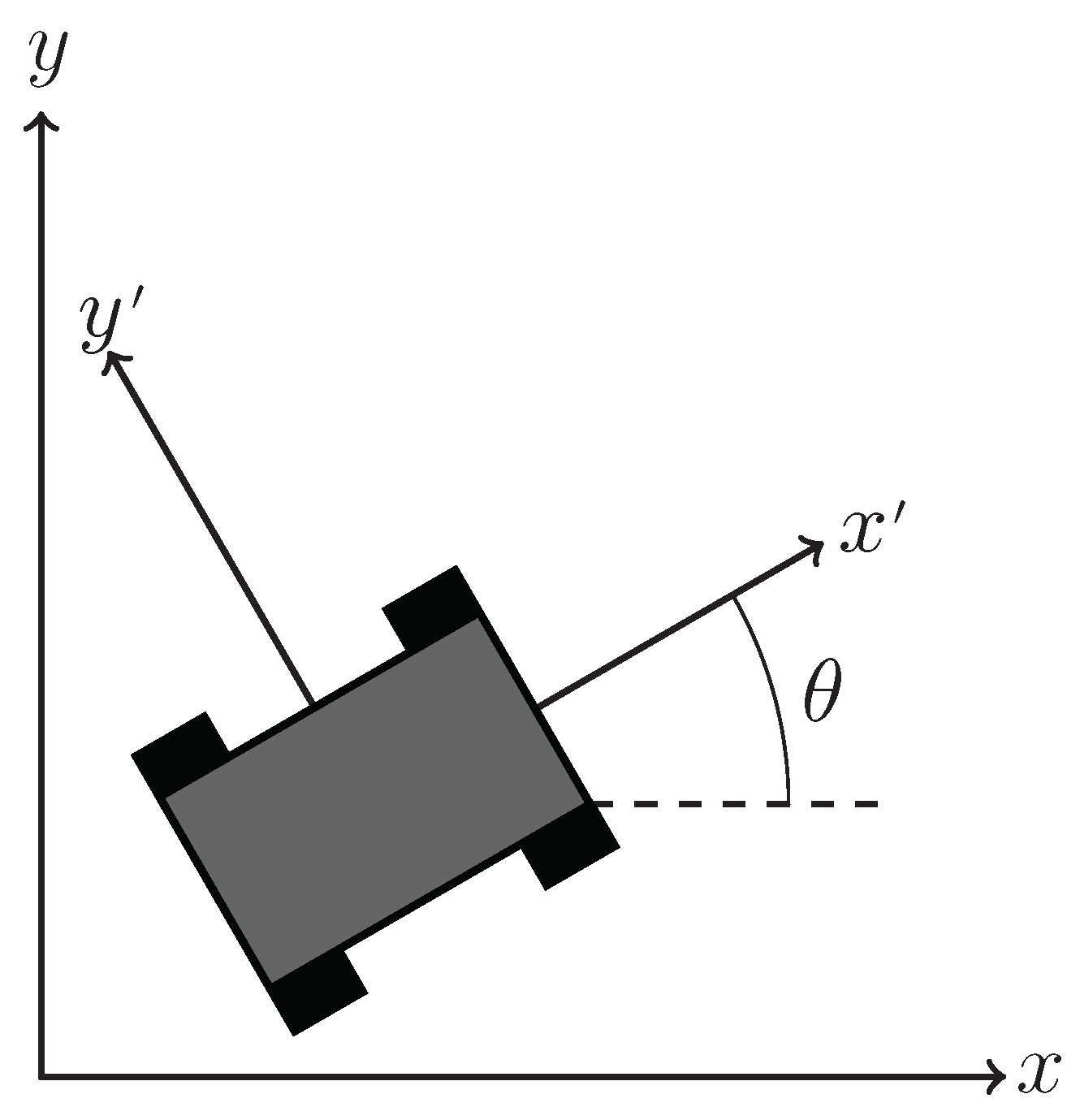
2. Mathematical Preliminaries
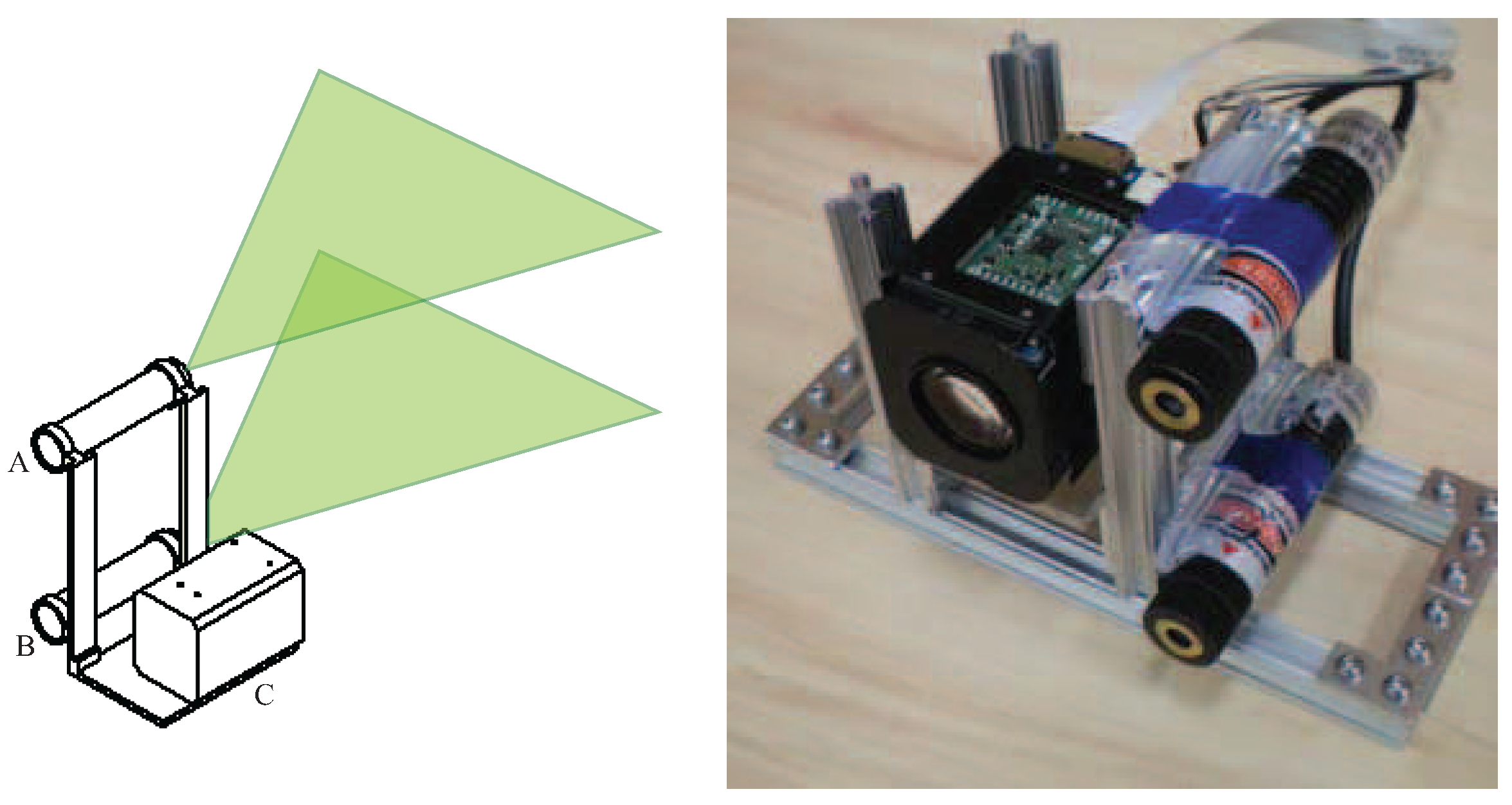
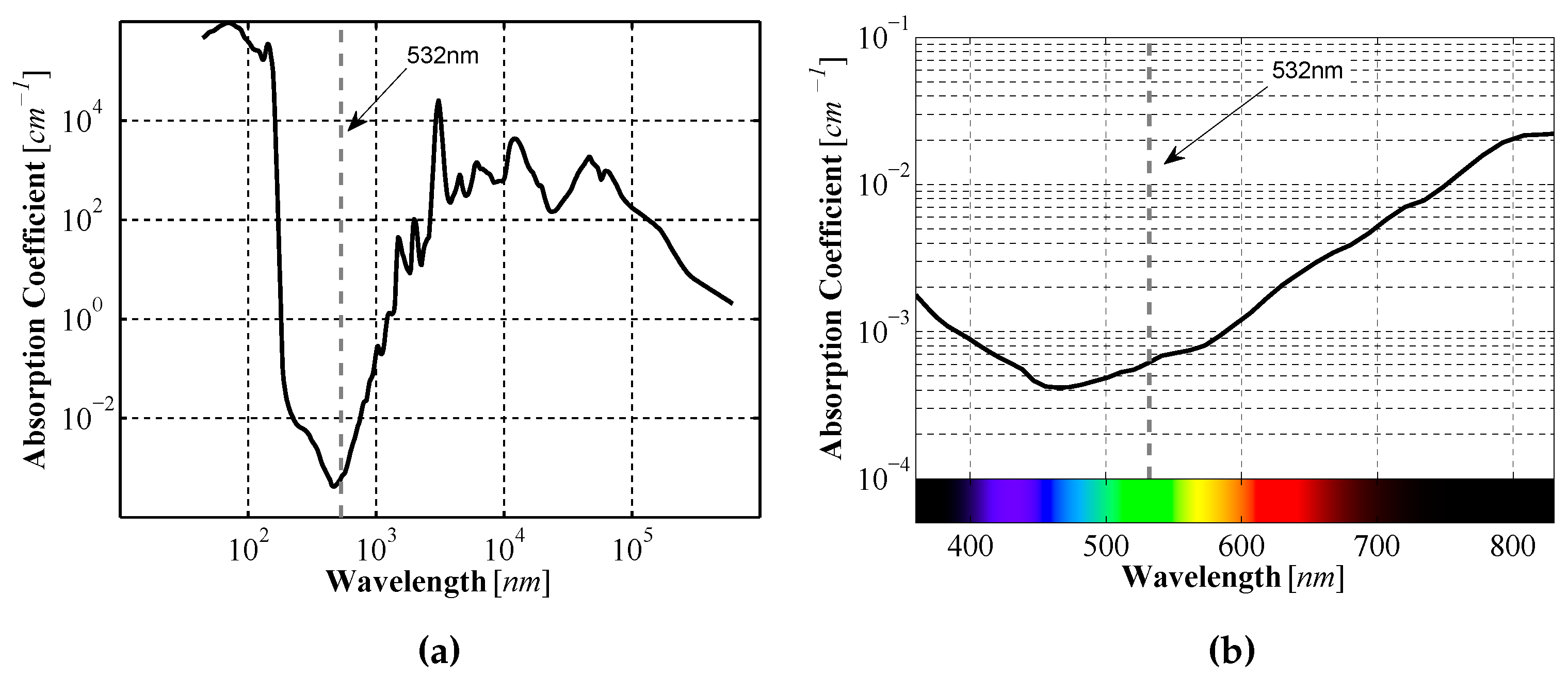
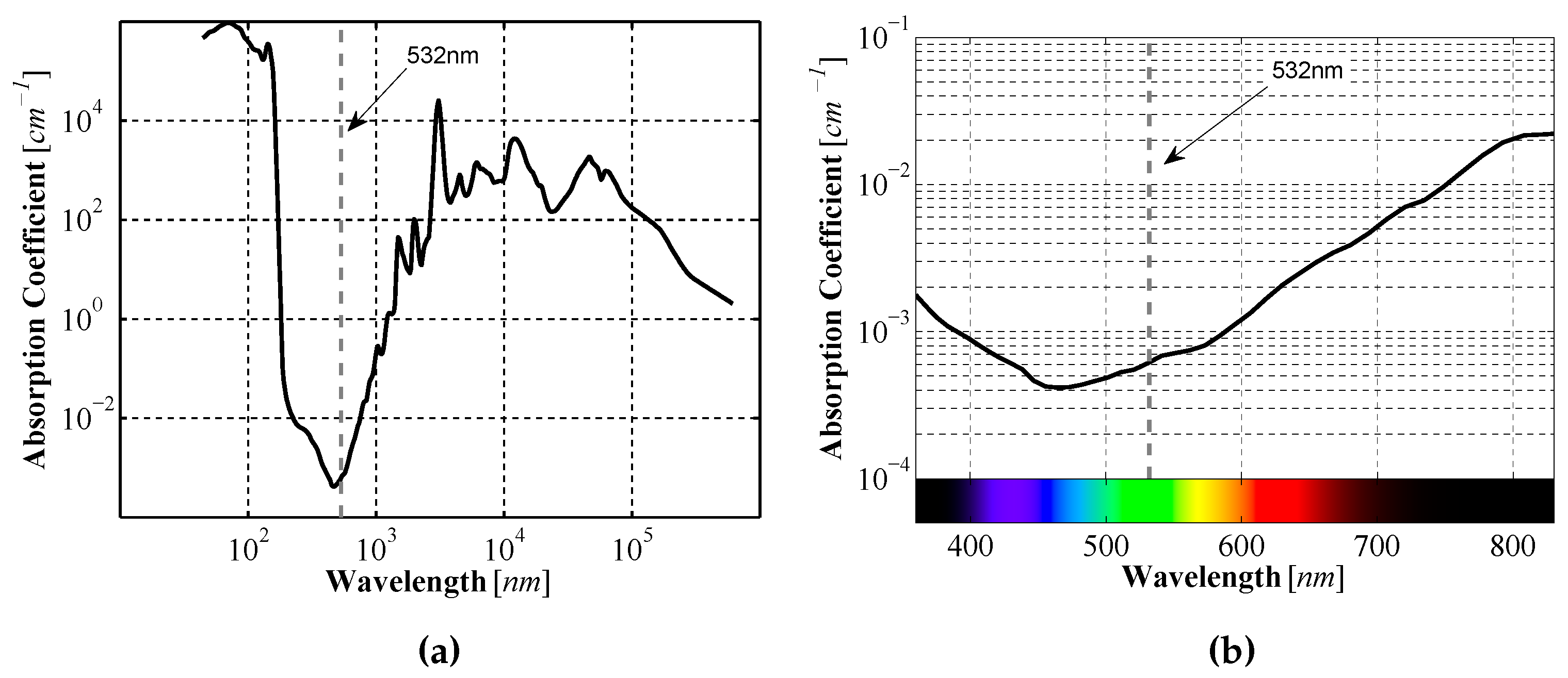
3. Camera and Laser Rangefinder
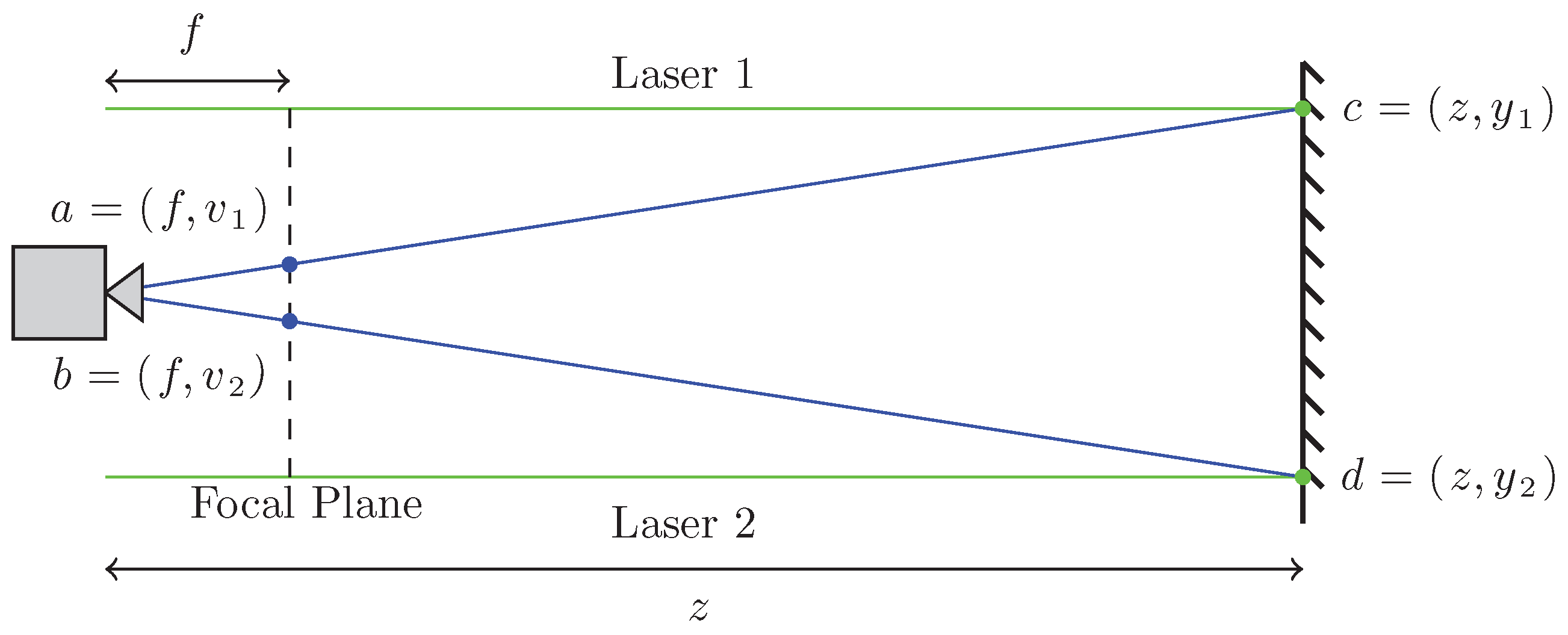
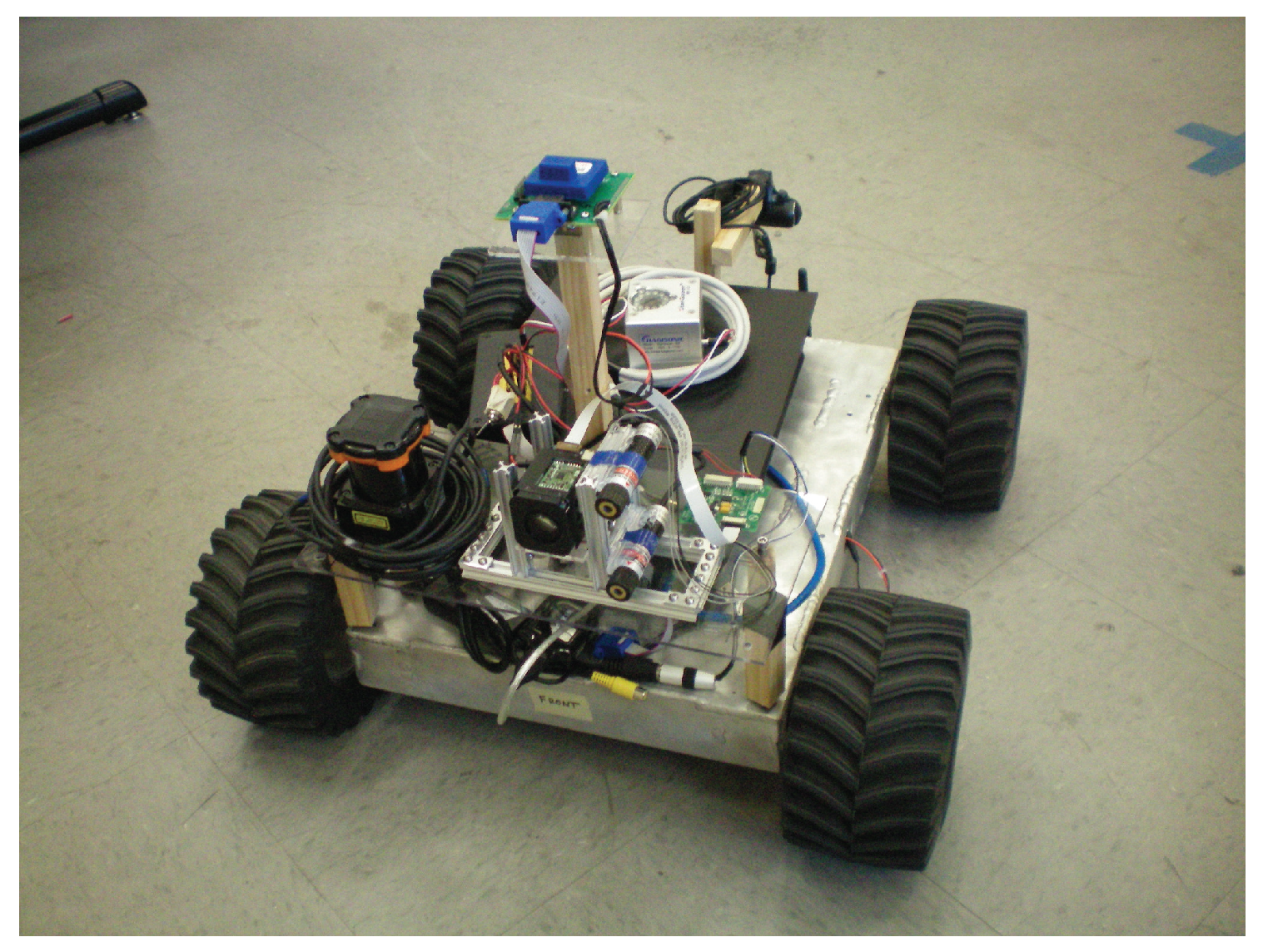
3.1. Physical Layout
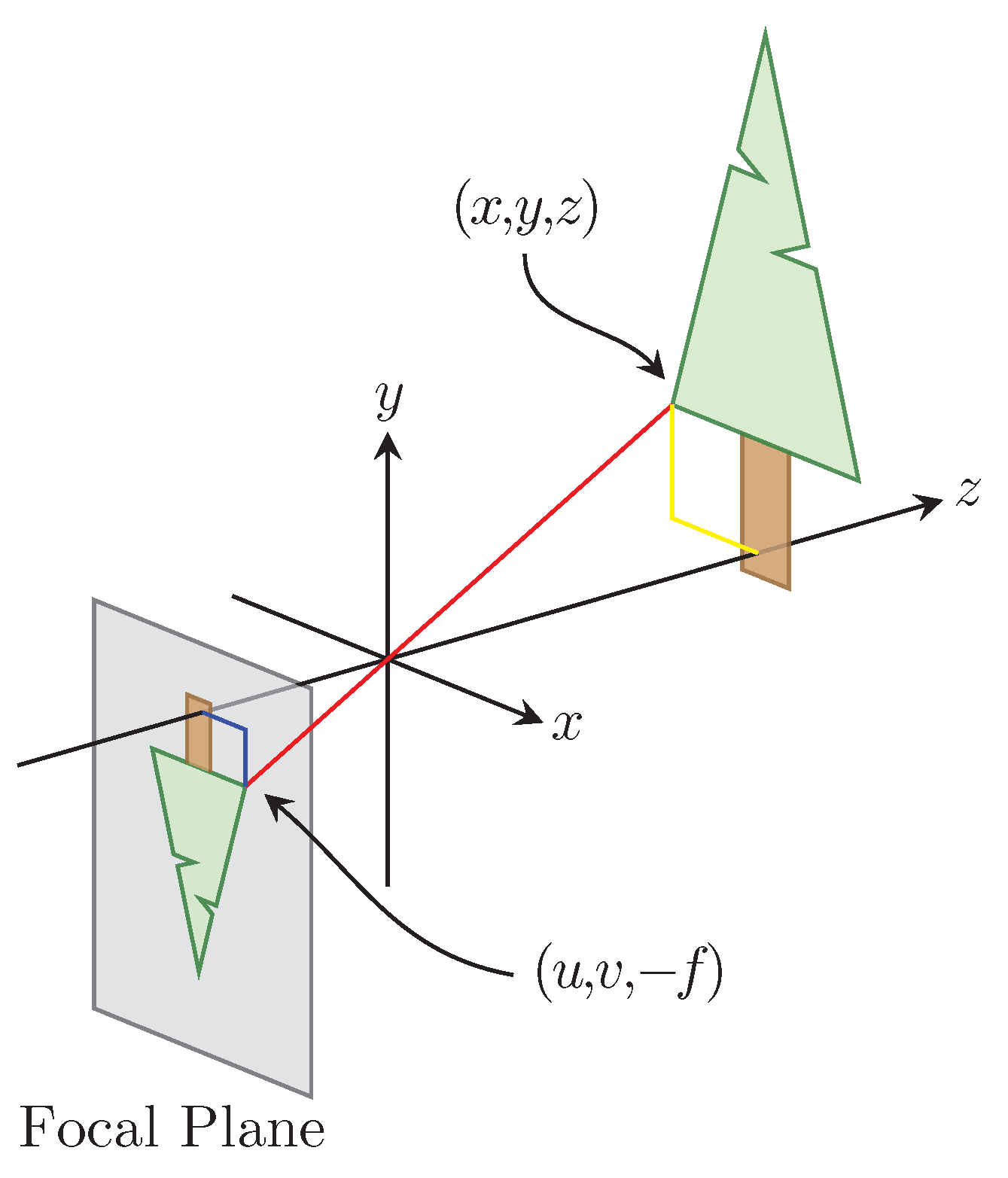
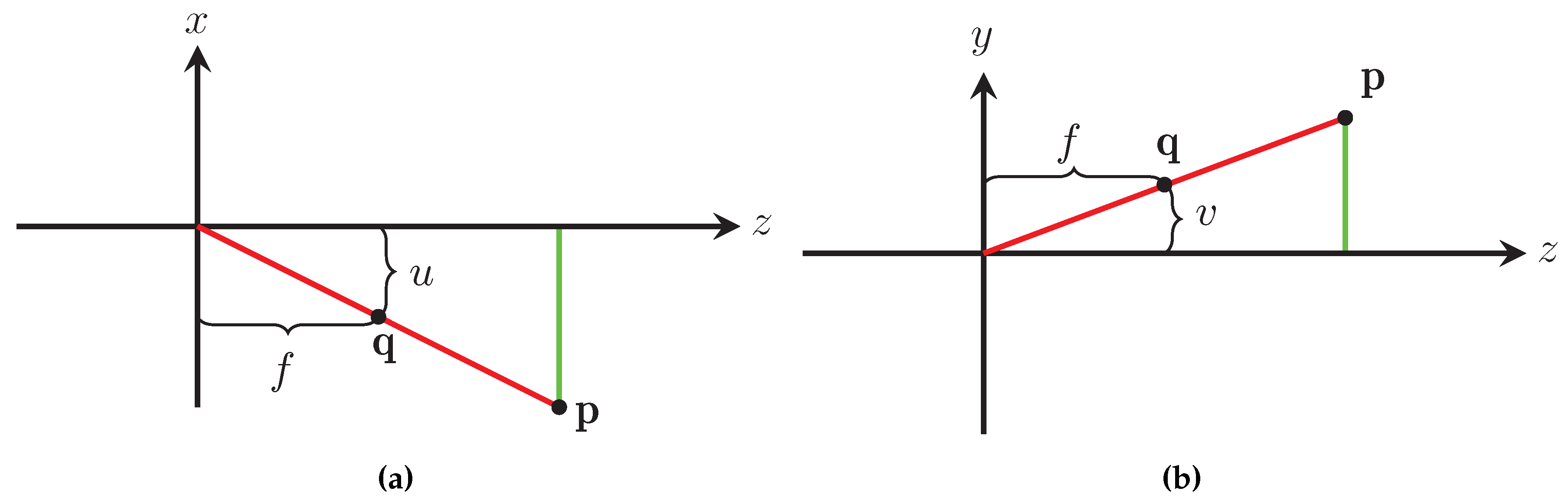
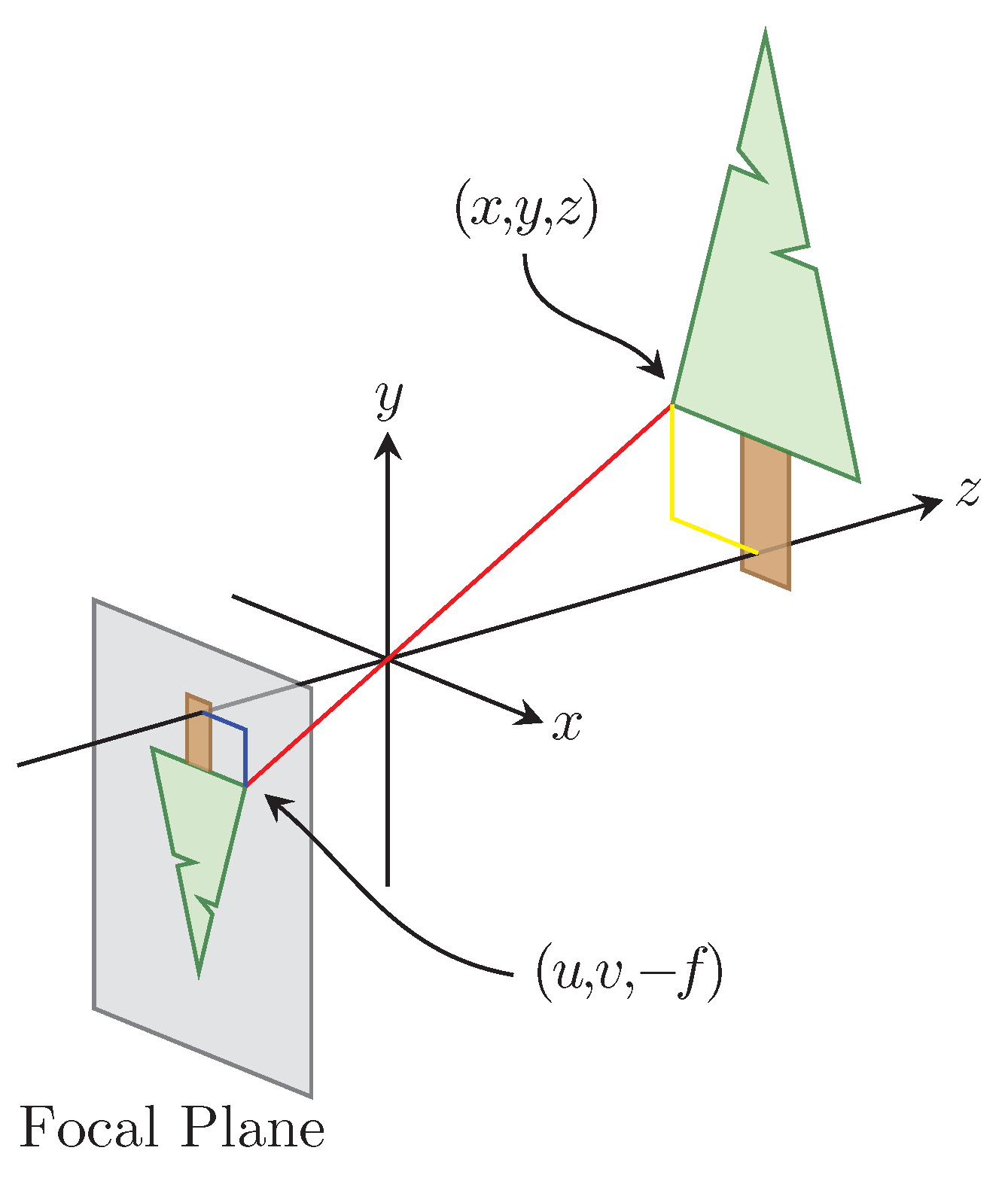
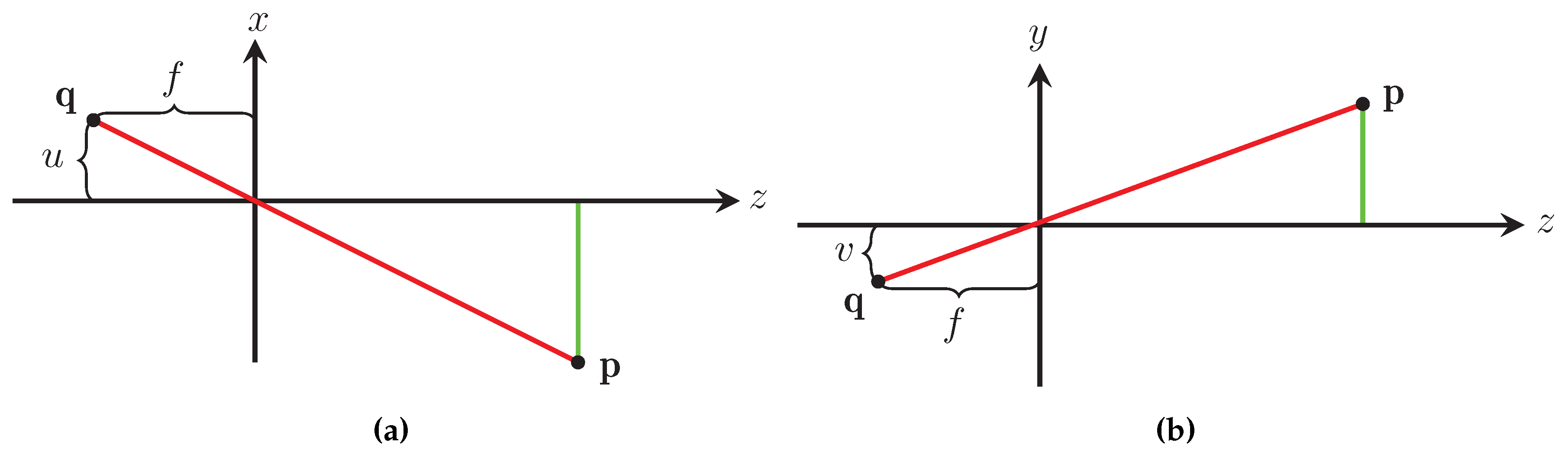
3.2. Pinhole Camera Model
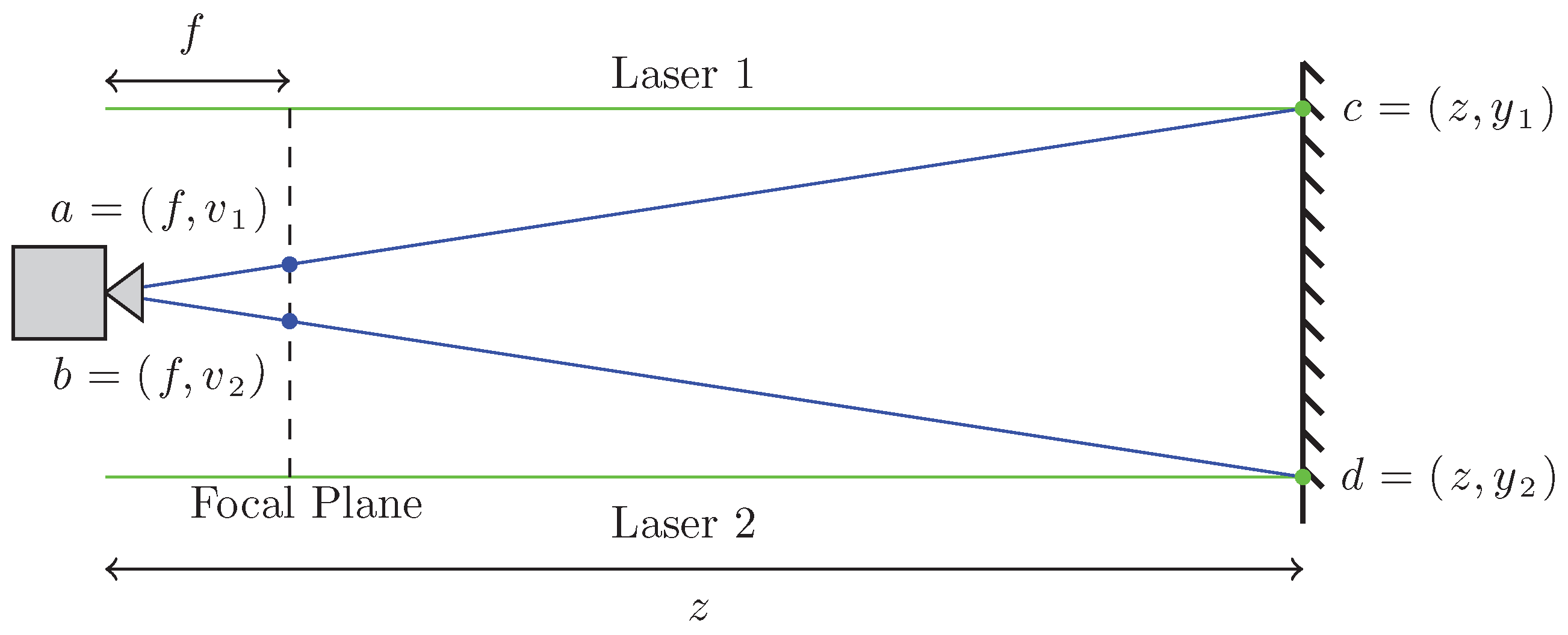
3.3. Distance Measurement Theory
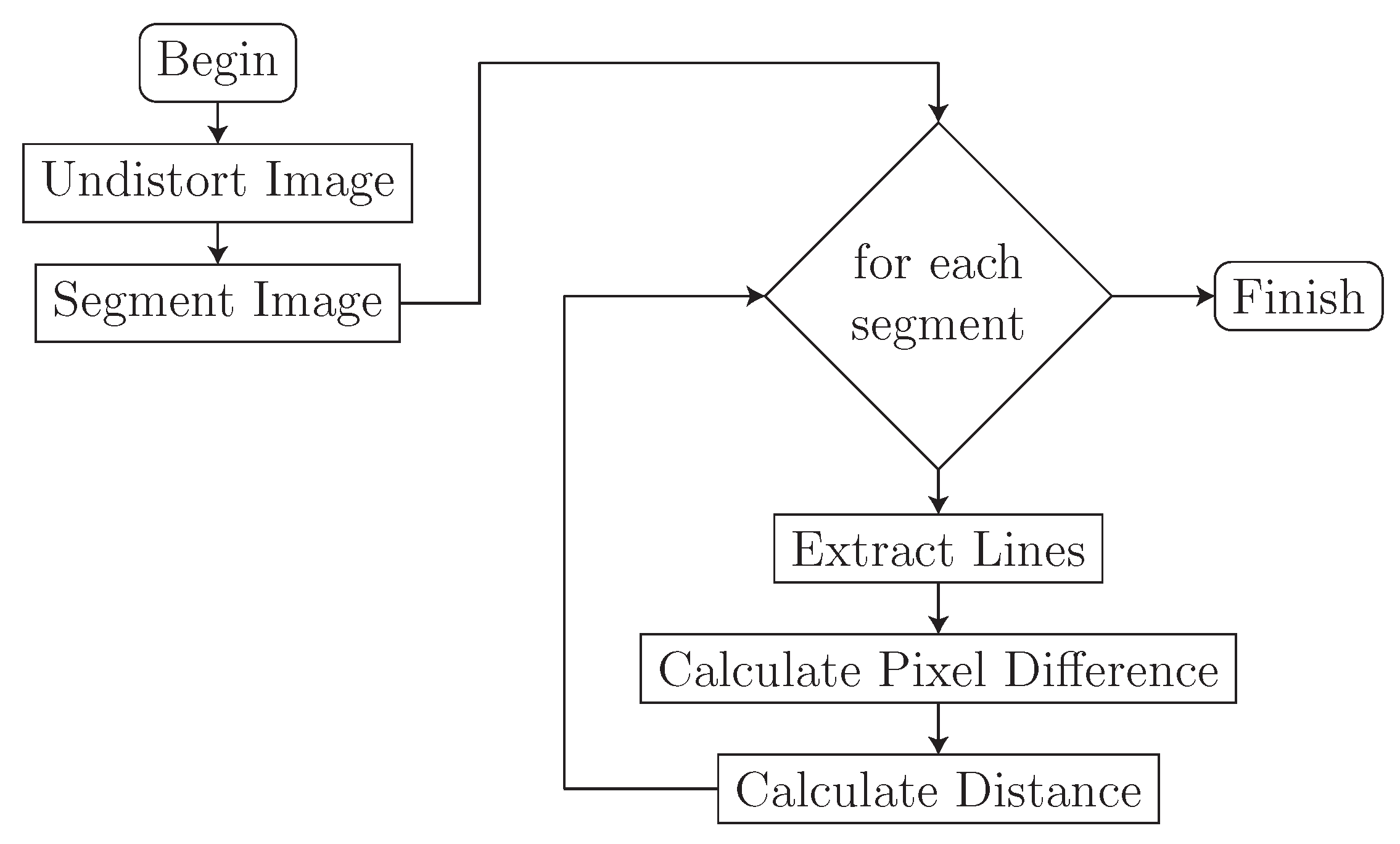
3.4. Image Processing Algorithm
3.4.1. Distortion Removal
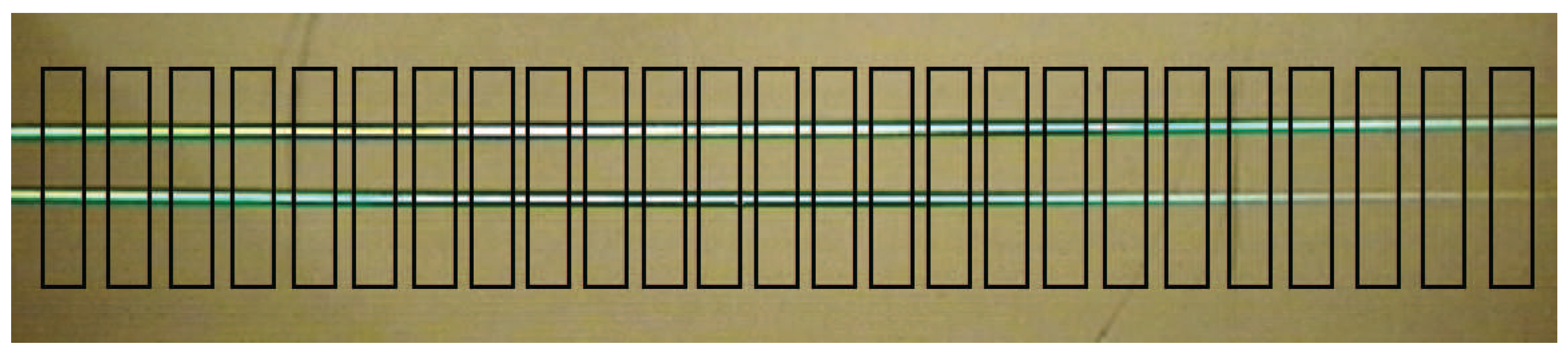
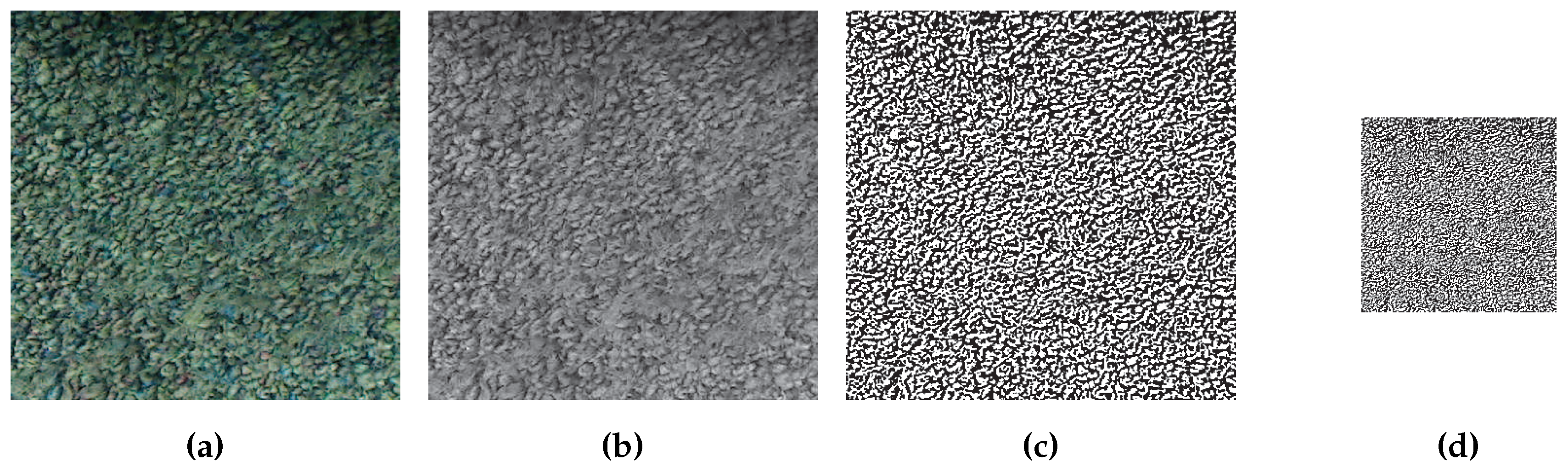
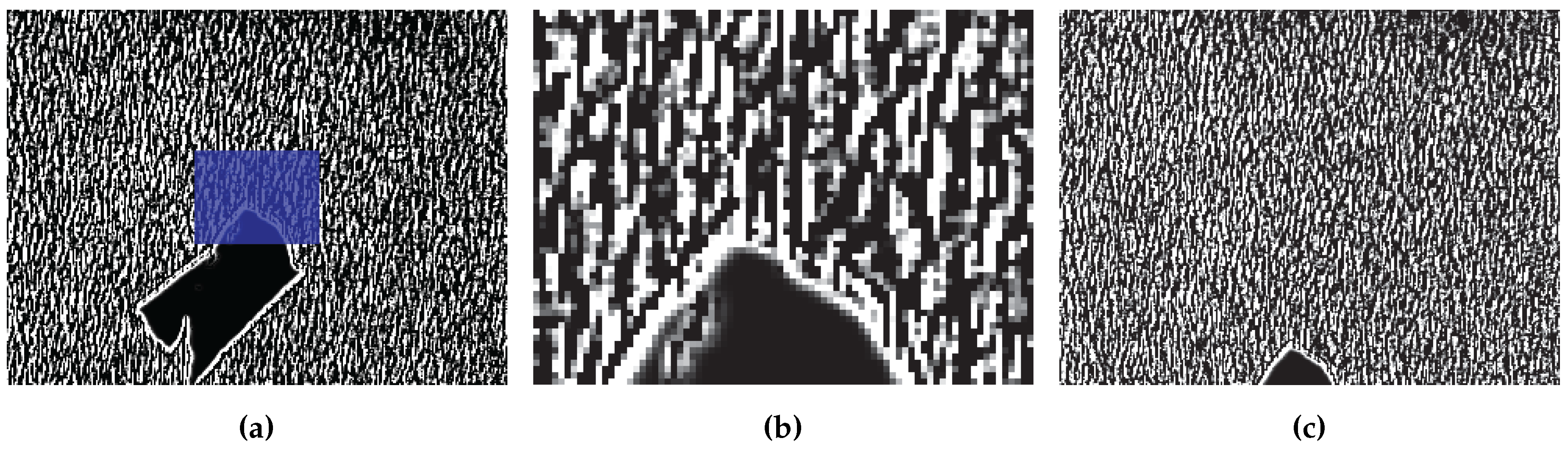
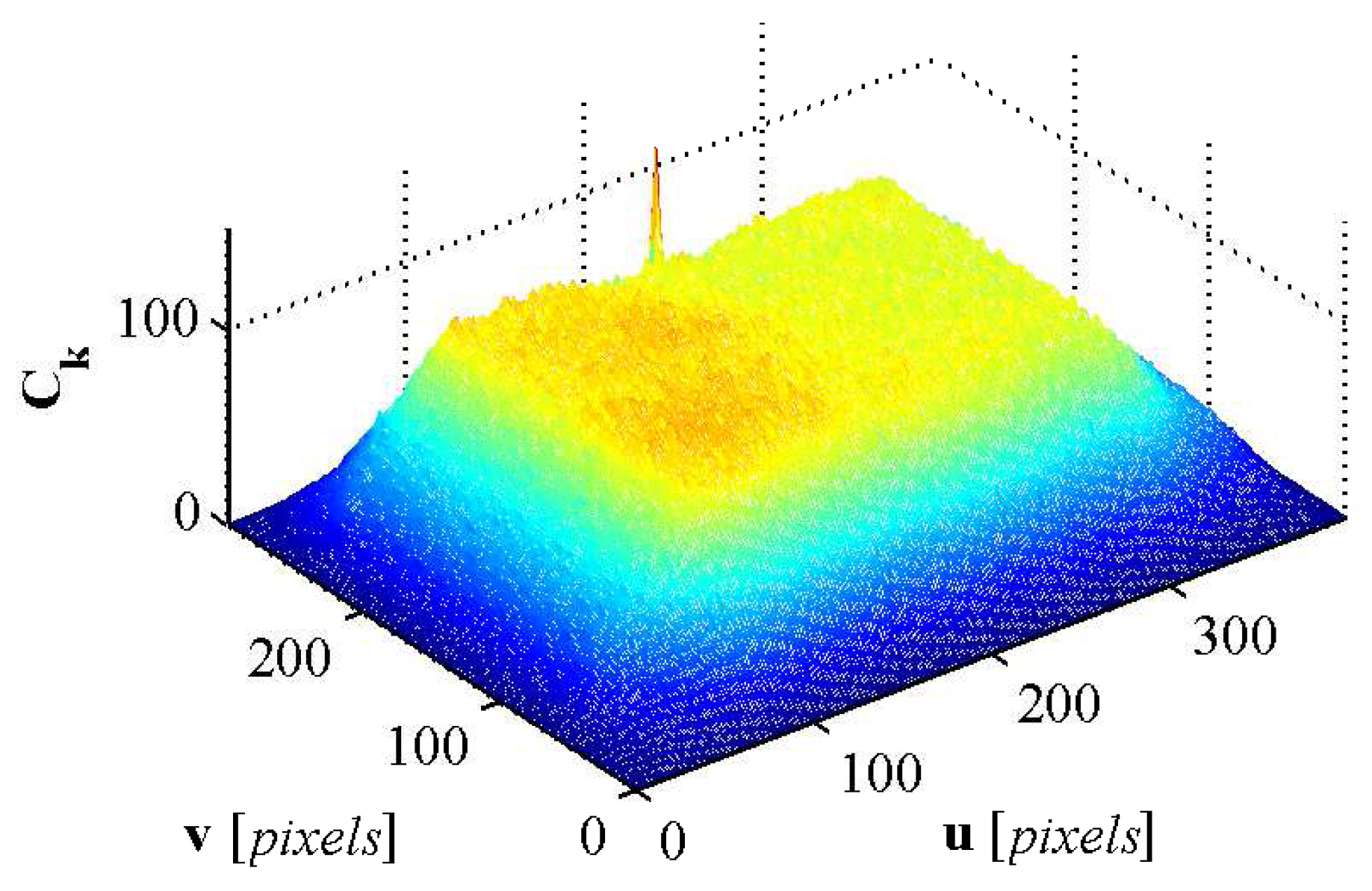
3.4.2. Image Segmentation
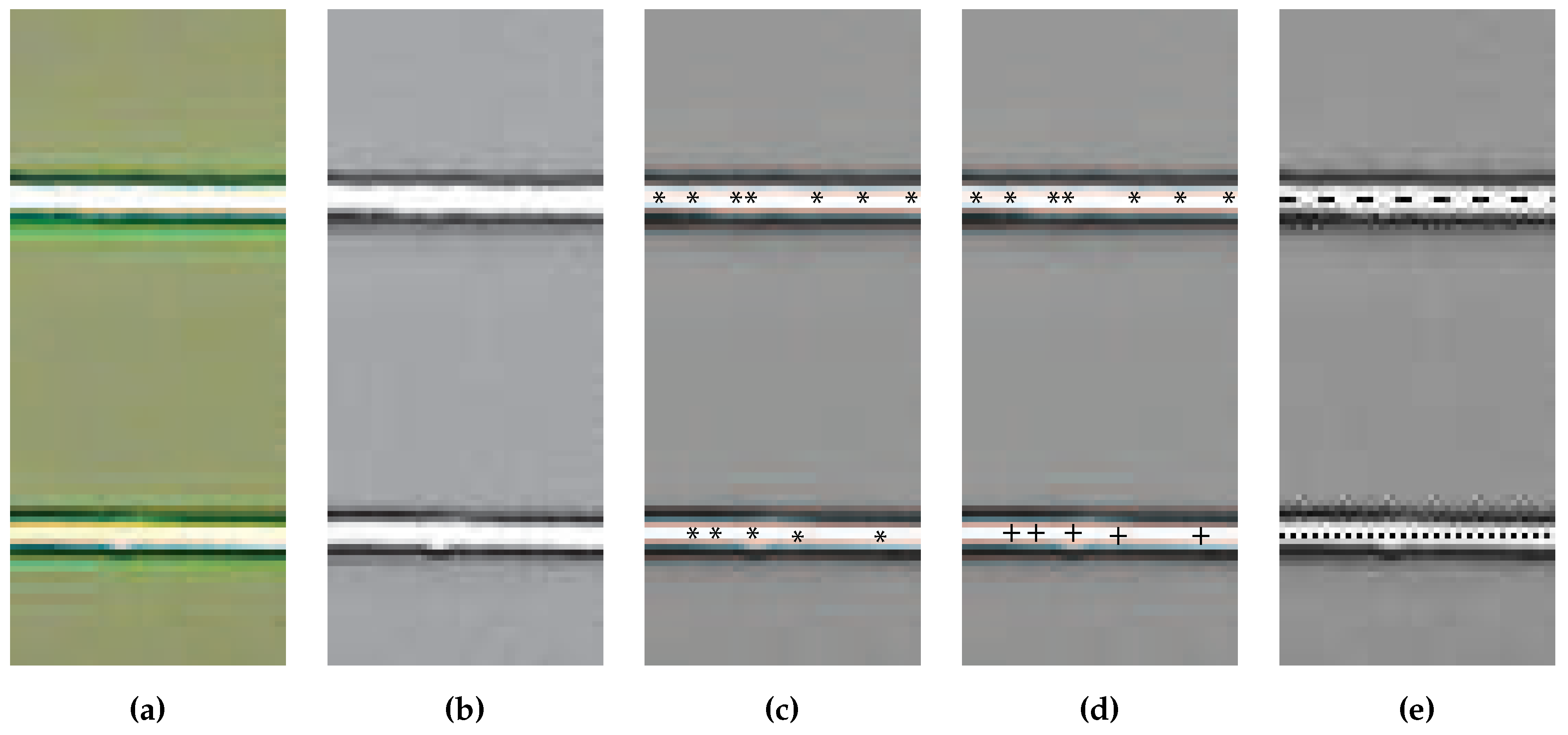
3.4.3. Line Extraction
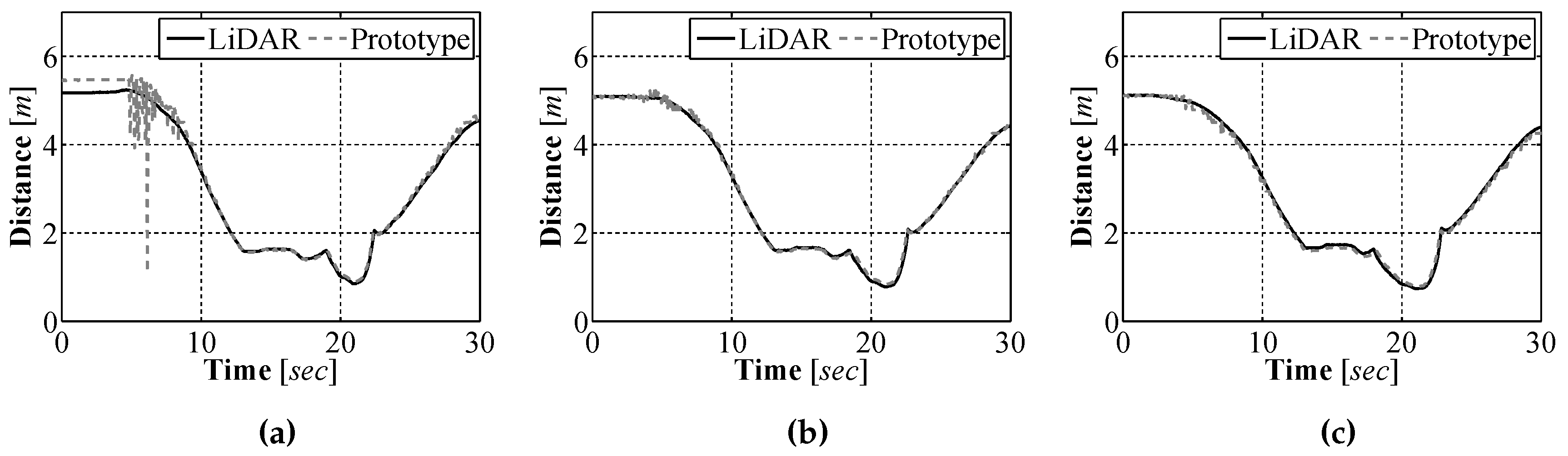
3.5. Experimental Results
3.5.1. In Air Testing
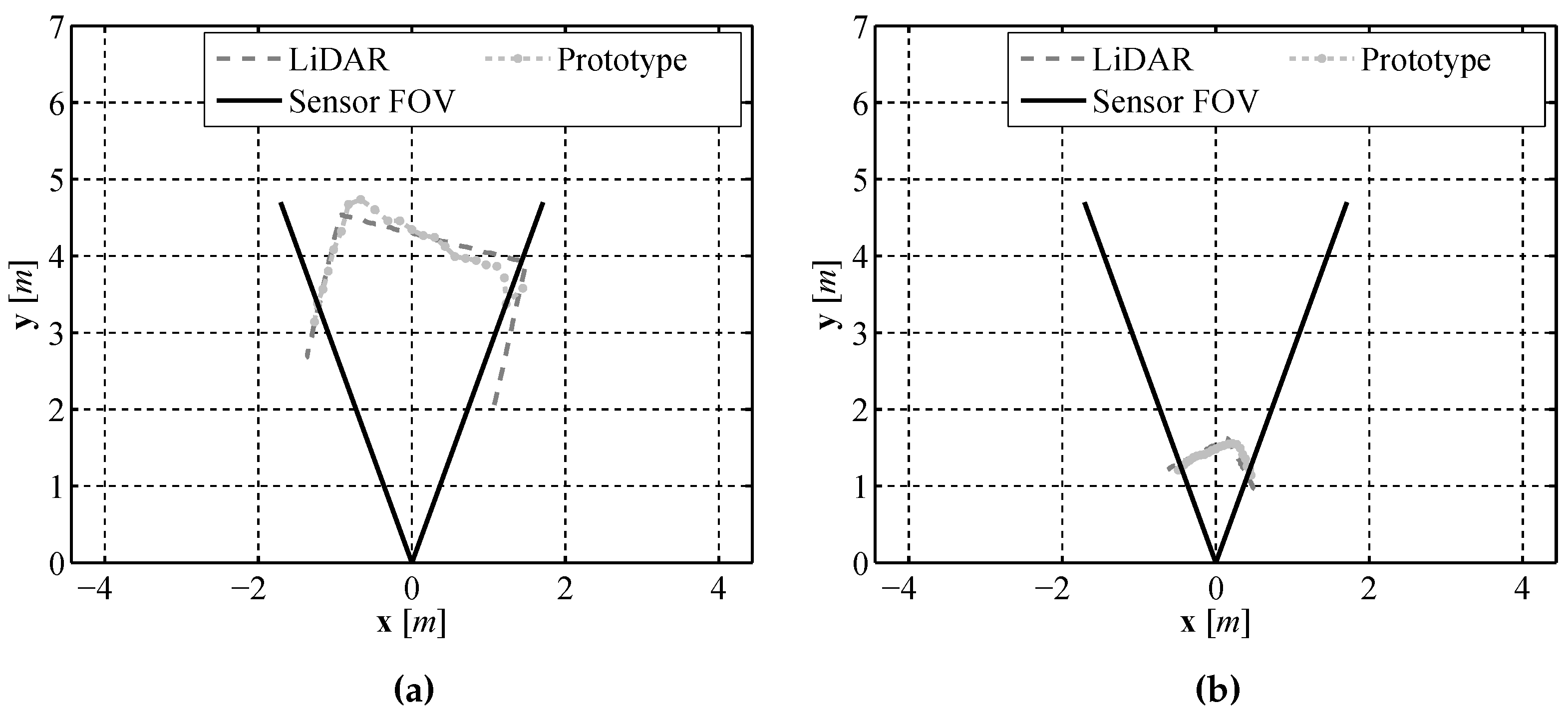
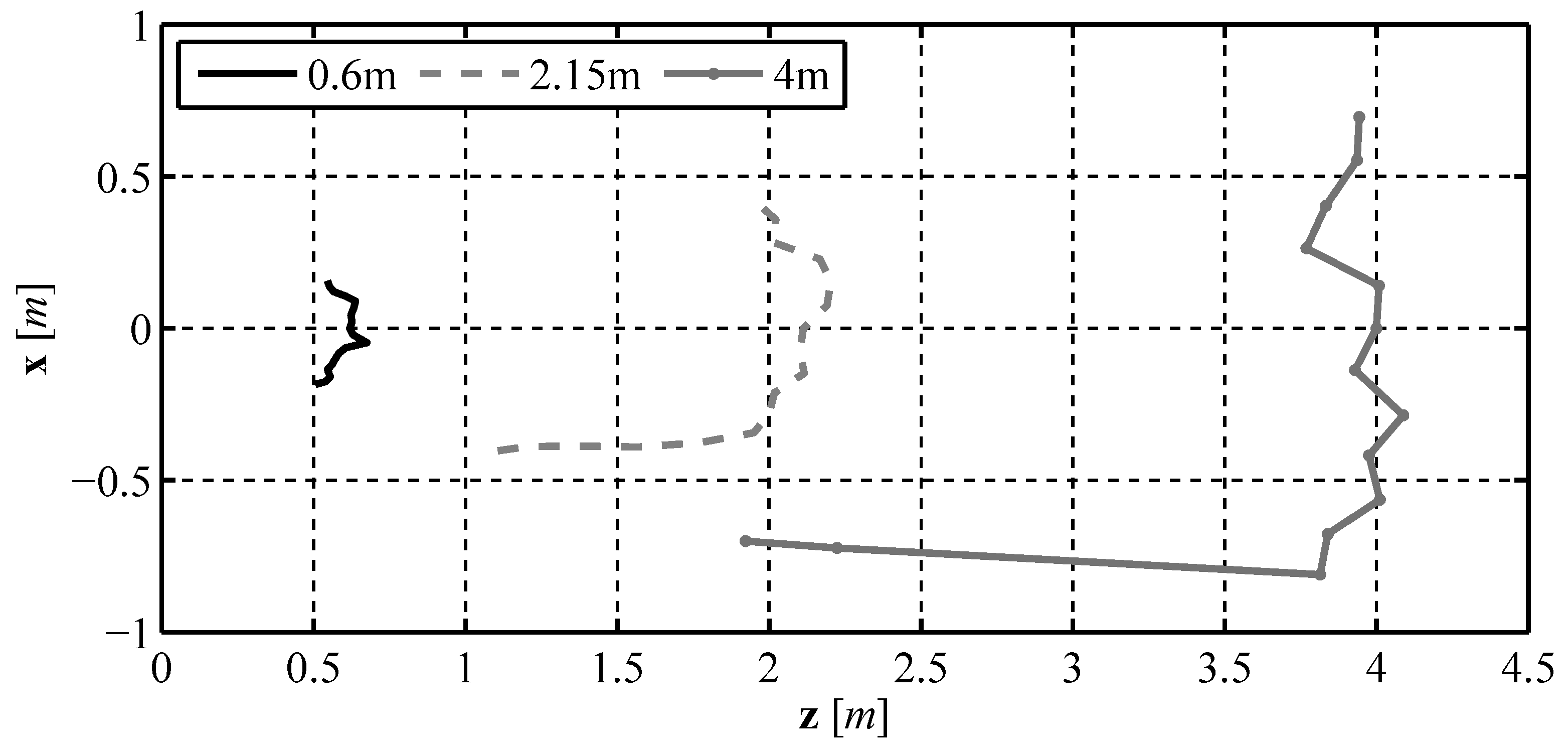
3.5.2. Underwater Testing
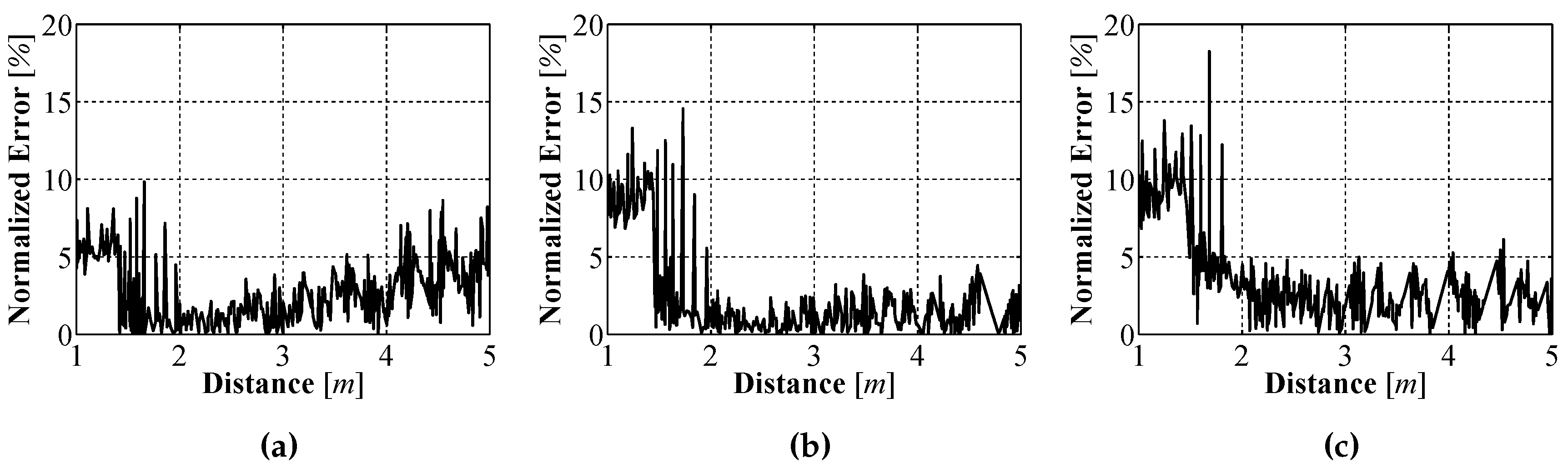
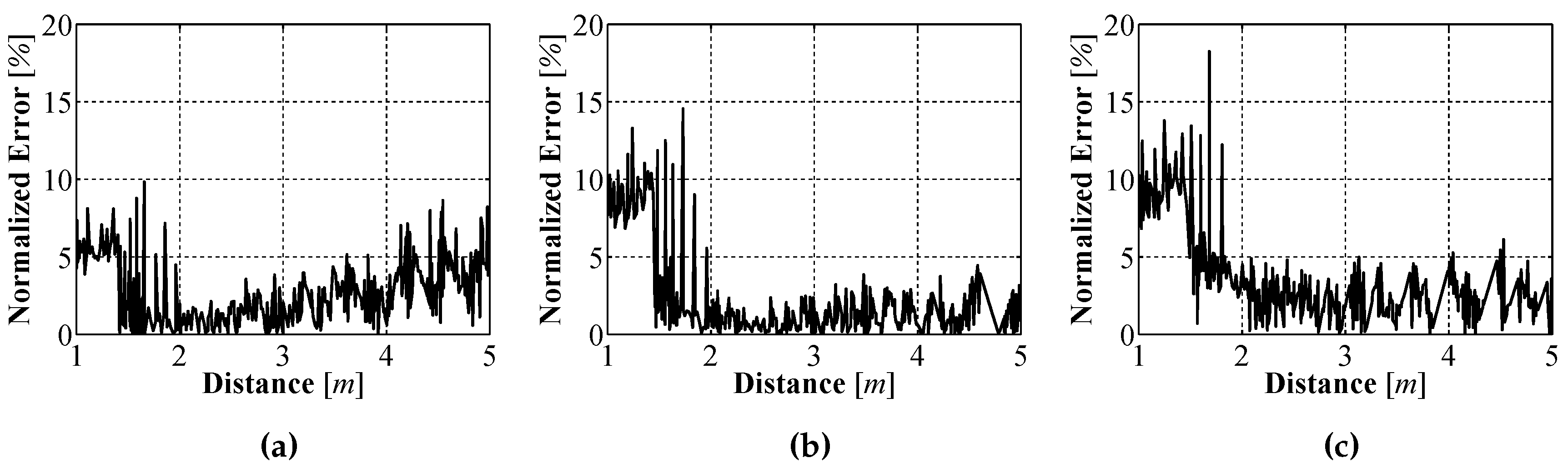
3.6. Error Analysis
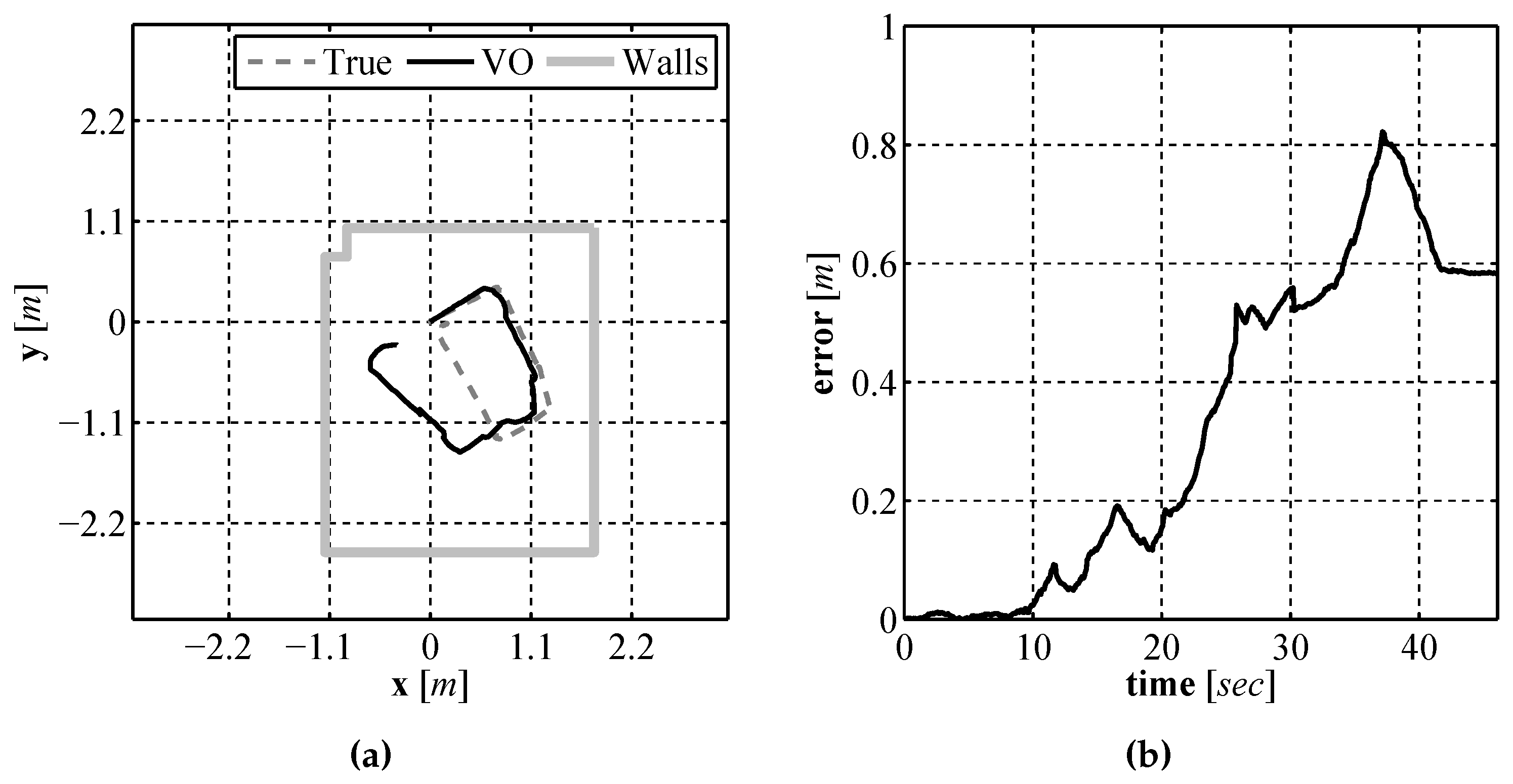
4. Visual Odometry with Downward Facing Camera
4.1. Visual Odometry Algorithm
4.2. Experimental Results
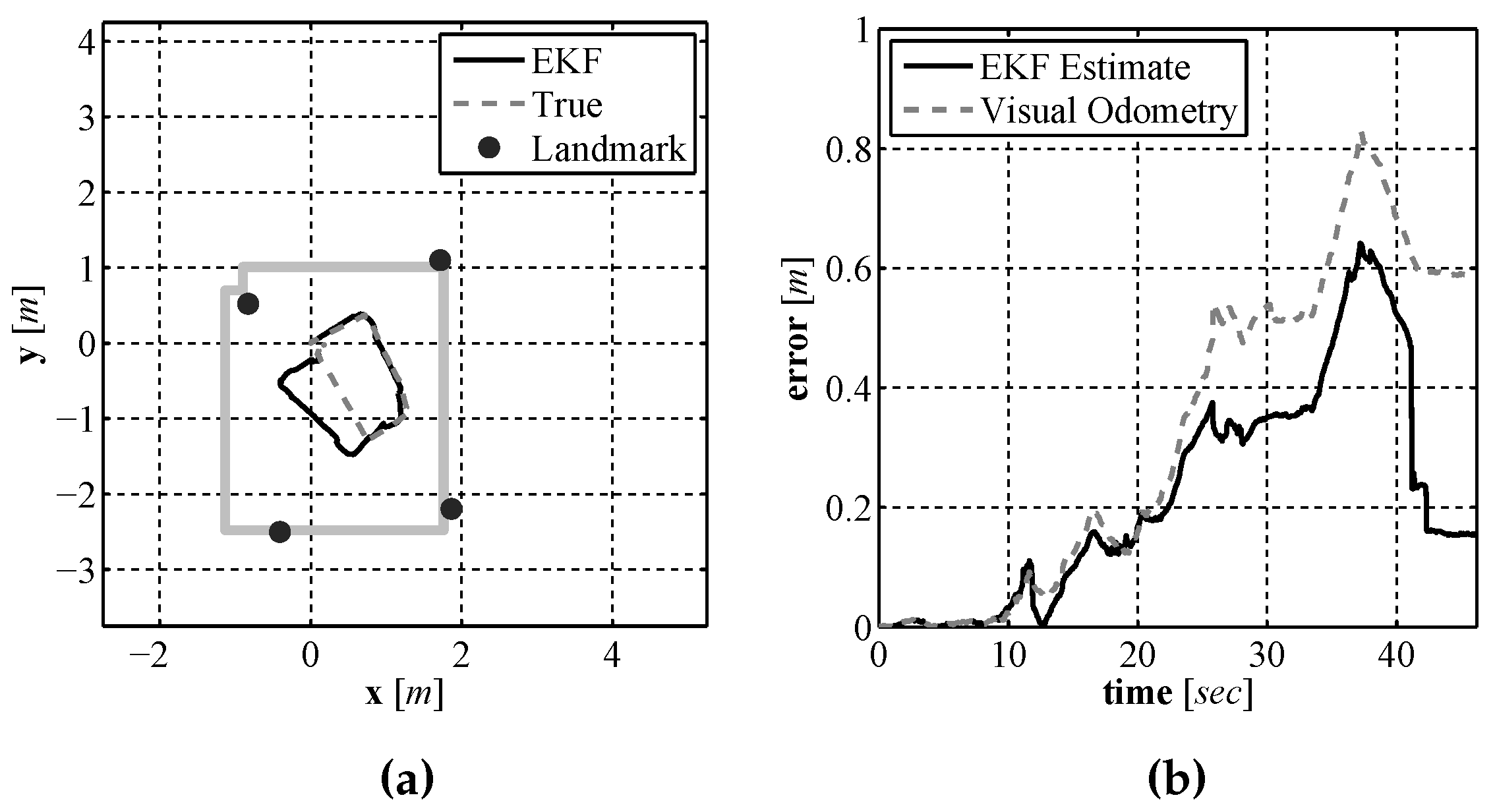
5. Sensor Validation with EKF SLAM
5.1. The SLAM Problem
5.2. EKF SLAM Algorithm
5.2.1. Prediction
5.2.2. Correction
5.2.3. Augmentation
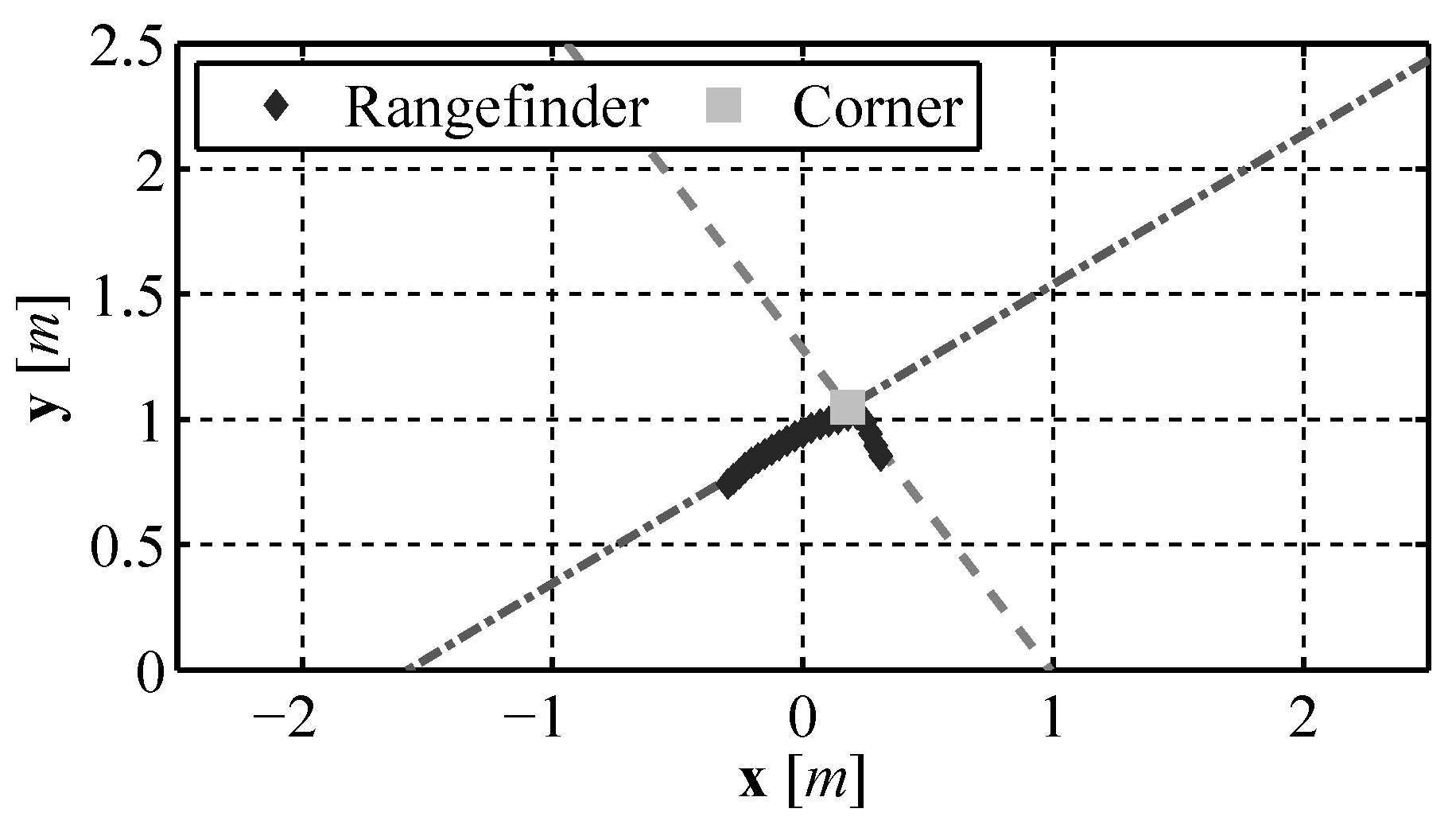
5.3. Feature Extraction and Data Association
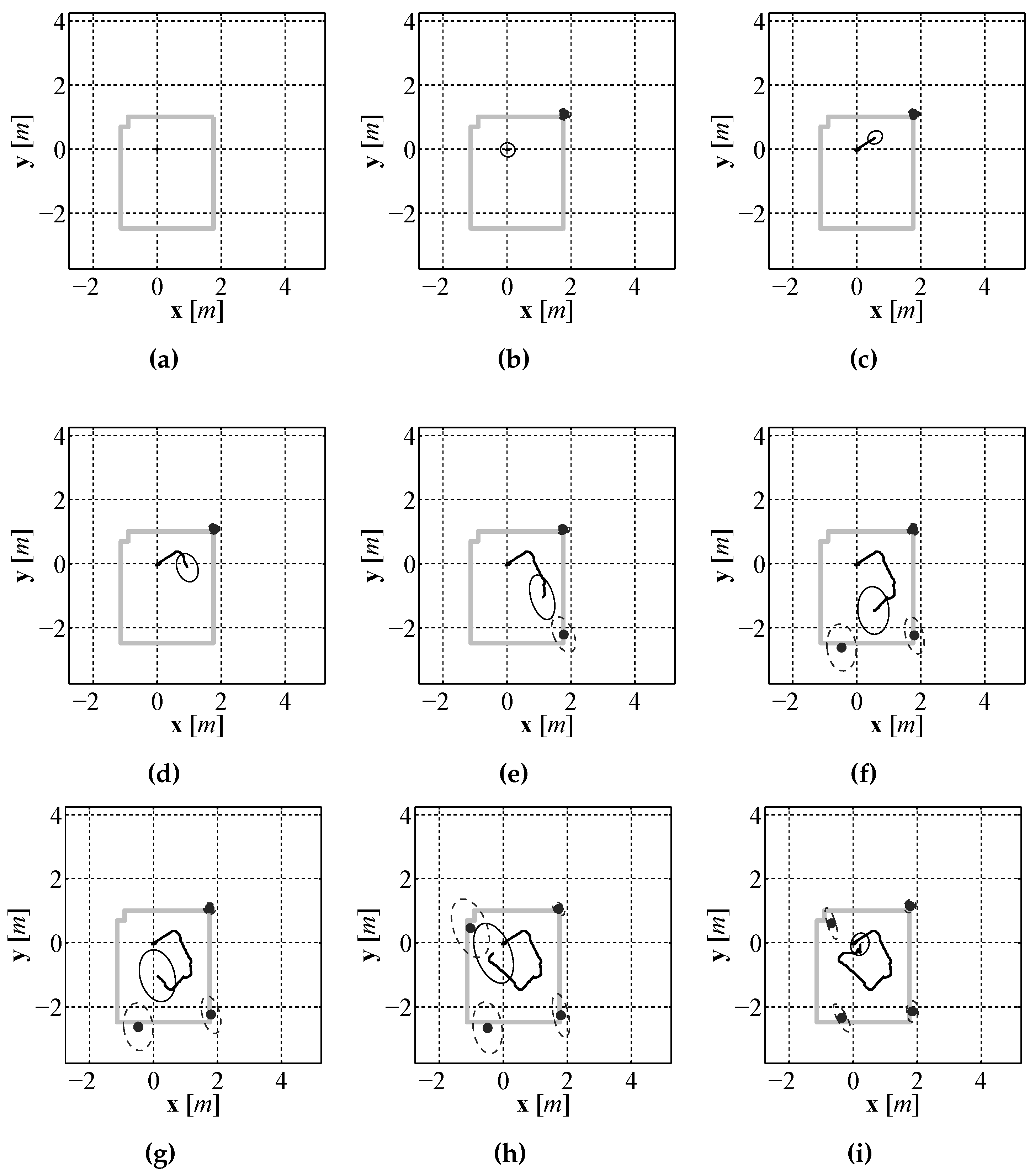
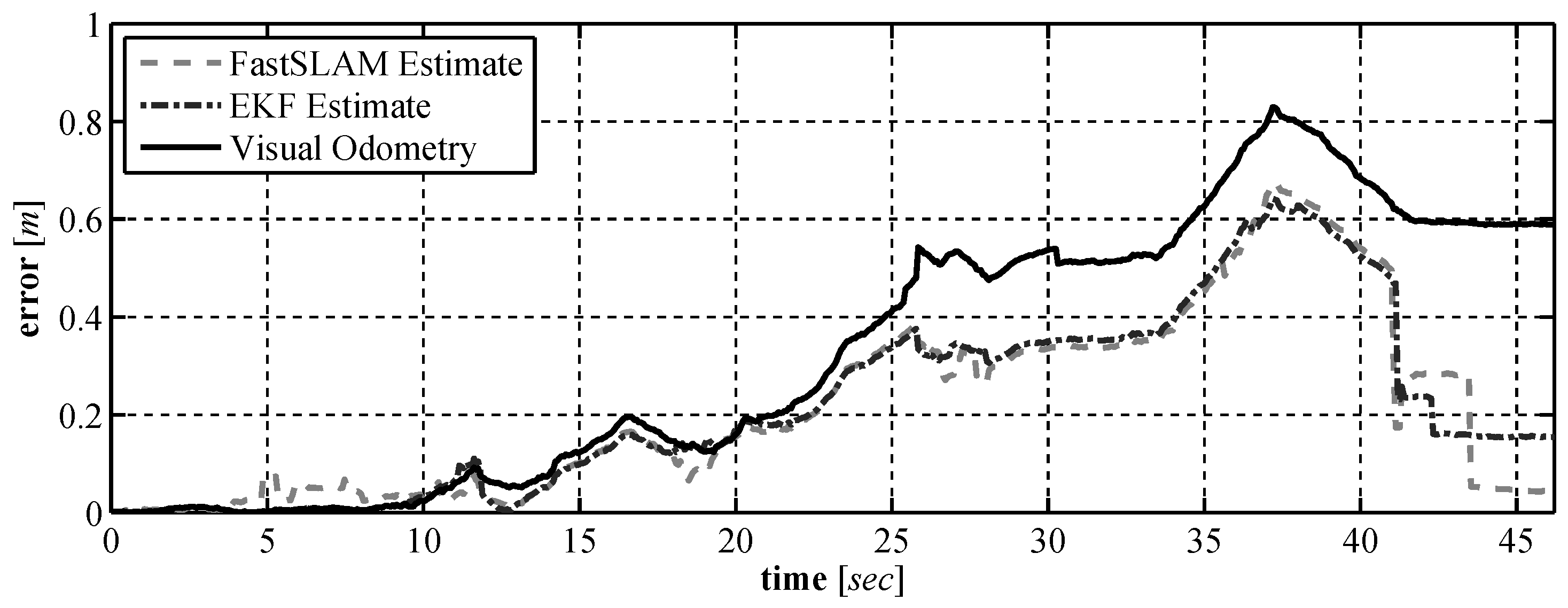
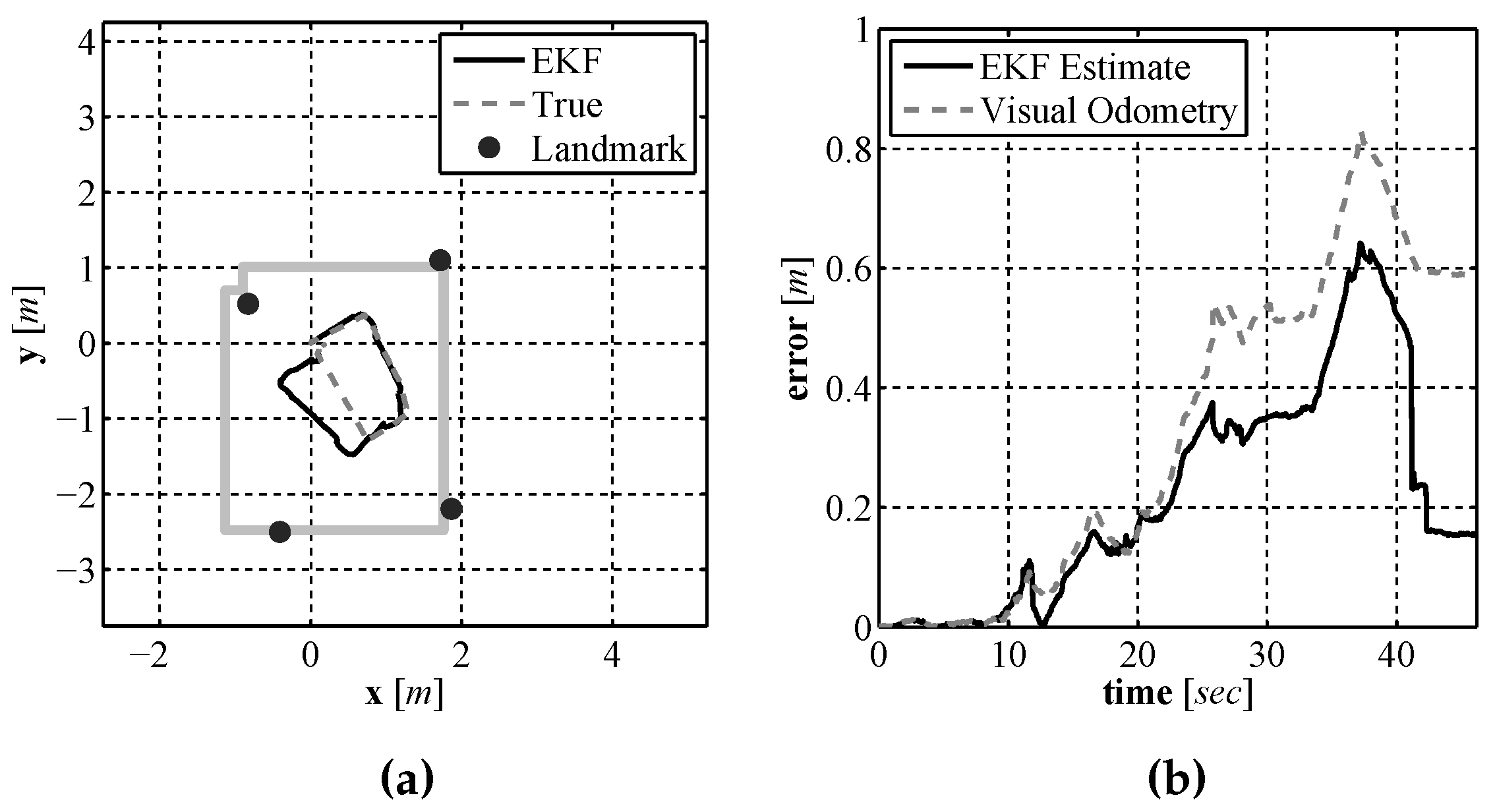
5.4. Experimental Results
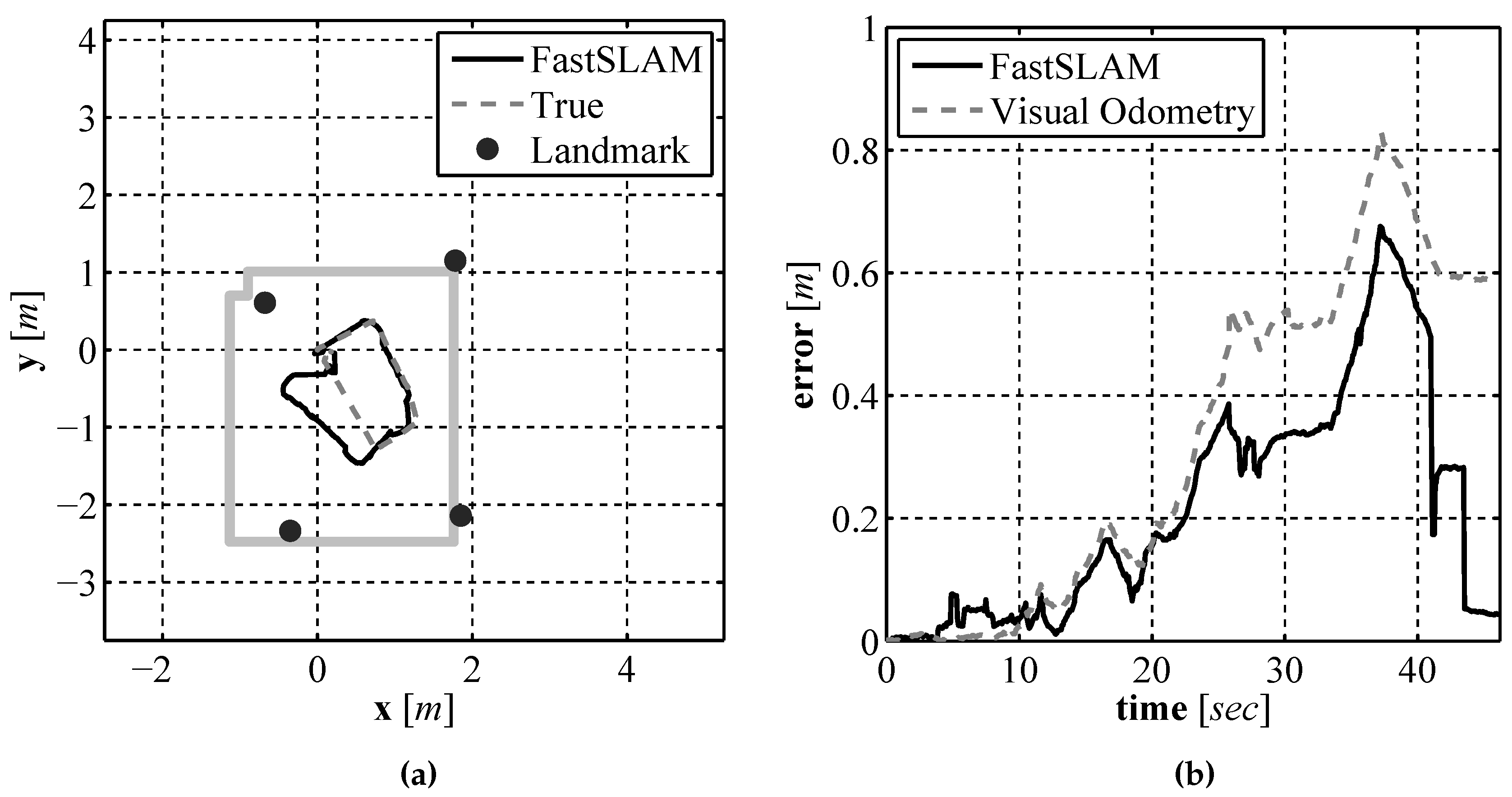
6. Sensor Validation with FastSLAM
6.1. FastSLAM Algorithm
6.1.1. Pose Sampling
6.1.2. Feature Location Estimation
6.1.3. Importance Weight Calculation
6.1.4. Resampling
6.2. New Feature Addition
6.3. Feature Extraction and Data Association
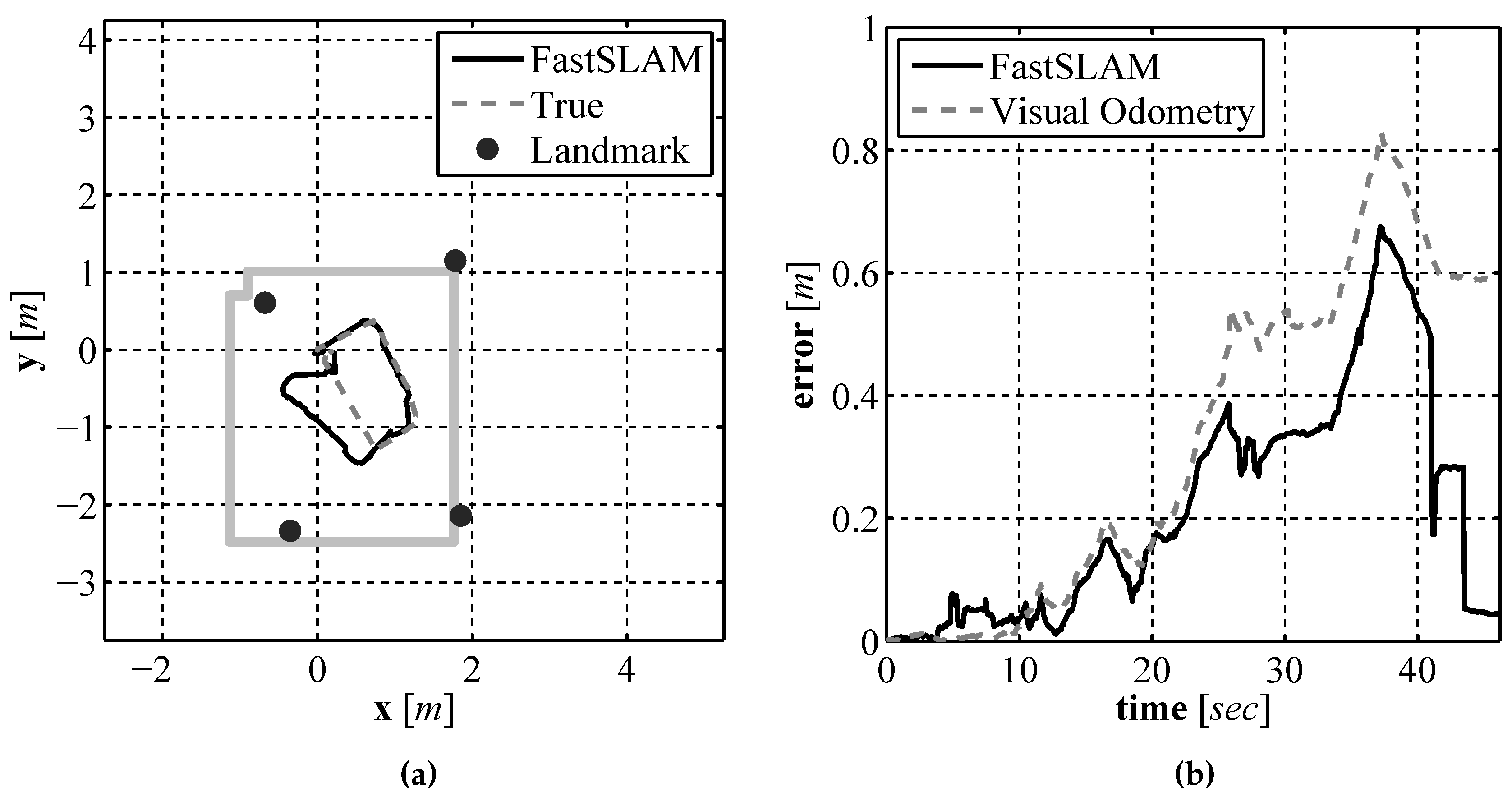
6.4. Experimental Results
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Smith, R.C.; Cheeseman, P. On the representation and estimation of spatial uncertainty. Int. J. Robot. Res. 1986, 5, 56–68. [Google Scholar] [CrossRef]
- Smith, R.; Self, M.; Cheeseman, P. Estimating uncertain spatial relationships in robotics. In Autonomous Robot Vehicles; Springer: New York, NY, USA, 1990; pp. 167–193. [Google Scholar]
- Montemerlo, M. FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem with Unknown Data Association. Ph.D. Thesis, Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, USA, 2003. [Google Scholar]
- West, M.E.; Syrmos, V.L. Navigation of an autonomous underwater vehicle (AUV) using robust SLAM. In Proceedings of the 2006 IEEE International Symposium on Intelligent Control and Computer Aided Control System Design, Munich, Germany, 4–6 October 2006; pp. 1801–1806.
- Clark, C.M.; Olstad, C.S.; Buhagiar, K.; Gambin, T. Archaeology via underwater robots: Mapping and localization within maltese cistern systems. In Proceedings of the 10th International Conference on Control, Automation, Robotics and Vision, 2008, Hanoi, Vietnam, 17–20 December 2008; pp. 662–667.
- Salvi, J.; Petillot, Y.; Thomas, S.; Aulinas, J. Visual slam for underwater vehicles using video velocity log and natural landmarks. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–6.
- Eustice, R.; Singh, H.; Leonard, J.J.; Walter, M.; Ballard, R. Visually Navigating the RMS Titanic with SLAM Information Filters. In Proceedings of the Robotics: Science and Systems, Cambridge, MA, USA, 8–11 June 2005.
- Cain, C.; Leonessa, A. Laser based rangefinder for underwater applications. In Proceedings of the American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 6190–6195.
- Muljowidodo, K.; Rasyid, M.A.; SaptoAdi, N.; Budiyono, A. Vision based distancemeasurement system using single laser pointer design for underwater vehicle. Indian J. Mar. Sci. 2009, 38, 324–331. [Google Scholar]
- Karras, G.C.; Panagou, D.J.; Kyriakopoulos, K.J. Target-referenced localization of an underwater vehicle using a laser-based vision system. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–6.
- Sony FCBEX11D. Available online: http://pro.sony.com/bbsc/ssr/product-FCBEX11D (accessed on 1 September 2015).
- Apinex GM-CW02L. Available online: http://www.apinex.com/ret2/gmcw02L.html (accessed on 1 September 2015).
- Warren, S.G. Optical constants of ice from the ultraviolet to the microwave. Appl. Opt. 1984, 23, 1206–1225. [Google Scholar] [CrossRef] [PubMed]
- Bradski, G.; Kaehler, A. Learning OpenCV; O’Reilly Media Inc.: Sebastopol, CA, USA, 2008. [Google Scholar]
- Duane, C.B. Close-range camera calibration. Photogramm. Eng. 1971, 37, 855–866. [Google Scholar]
- Camera Calibration Toolbox for Matlab. Available online: http://www.vision.caltech.edu/bouguetj/calib.doc/ (accessed on 1 September 2015).
- Zhang, Z. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999.
- Heikkila, J.; Silven, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the 1997 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, WA, USA, 17–19 June 1997; pp. 1106–1112.
- OpenCV. Available online: http://opencv.willowgarage.com/wiki/ (accessed on 1 September 2015).
- MacQueen, J. Some methods for classification and analysis of multivariate observations. In Proceedings of the fifth Berkeley symposium on mathematical statistics and probability, Berkeley, CA, USA, 21 June–18 July 1967; pp. 281–297.
- Hokuyo UTM-30LX. Available online: http://www.hokuyo-aut.jp/02sensor/07scanner/utm30lx.html (accessed on 1 September 2015).
- Woithe, H.C.; Boehm, D.; Kremer, U. Improving Slocum Glider Dead Reckoning Using a Doppler Velocity Log. In Proceedings of the OCEANS 2011, Waikoloa, HI, USA, 19–22 September 2011.
- Teledyne Explorer DVL. Available online: http://www.rdinstruments.com/explorer.aspx (accessed on 1 September 2015).
- Nourani-Vatani, N.; Borges, P.V.K. Correlation-based visual odometry for ground vehicles. J. Field Robot. 2011, 28, 742–768. [Google Scholar] [CrossRef]
- Stockman, G.; Shapiro, L.G. Computer Vision; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Hagisonic Stargazer. Available online: http://www.hagisonic.com/ (accessed on 1 September 2015).
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proc. F 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Smith, A.F.; Gelfand, A.E. Bayesian statistics without tears: A sampling—Resampling perspective. Am. Stat. 1992, 46, 84–88. [Google Scholar]
- Montemerlo, M.; Thrun, S. FastSLAM: A Scalable Method for the Simultaneous Localization and Mapping Problem in Robotics (Springer Tracts in Advanced Robotics); Springer-Verlag New York, Inc.: New York, NY, USA, 2007. [Google Scholar]
- Lloret, J. Underwater Sensor Nodes and Networks. Sensors 2013, 13, 11782–11796. [Google Scholar] [CrossRef] [PubMed]
- Garcia, M.; Sendra, S.; Atenas, M.; Lloret, J. Underwater Wireless Ad-Hoc Networks: A Survey. In Mobile Ad Hoc Networks: Current Status and Future Trends; CRC Press: Boca Raton, FL, USA, 2011; pp. 379–411. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| -1 | -1 | -1 | -1 | -1 | -1 | -1 |
| -1 | -1 | -1 | -1 | -1 | -1 | -1 |
| -1 | -1 | -1 | -1 | -1 | -1 | -1 |
| -1 | -1 | -1 | 48 | -1 | -1 | -1 |
| -1 | -1 | -1 | -1 | -1 | -1 | -1 |
| -1 | -1 | -1 | -1 | -1 | -1 | -1 |
| -1 | -1 | -1 | -1 | -1 | -1 | -1 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cain, C.; Leonessa, A. Validation of Underwater Sensor Package Using Feature Based SLAM. Sensors 2016, 16, 380. https://doi.org/10.3390/s16030380
Cain C, Leonessa A. Validation of Underwater Sensor Package Using Feature Based SLAM. Sensors. 2016; 16(3):380. https://doi.org/10.3390/s16030380
Chicago/Turabian StyleCain, Christopher, and Alexander Leonessa. 2016. "Validation of Underwater Sensor Package Using Feature Based SLAM" Sensors 16, no. 3: 380. https://doi.org/10.3390/s16030380
APA StyleCain, C., & Leonessa, A. (2016). Validation of Underwater Sensor Package Using Feature Based SLAM. Sensors, 16(3), 380. https://doi.org/10.3390/s16030380