
AUV Positioning Method Based on Tightly Coupled SINS/LBL for Underwater Acoustic Multipath Propagation



Abstract
:1. Introduction
2. Principle and Structure of the System
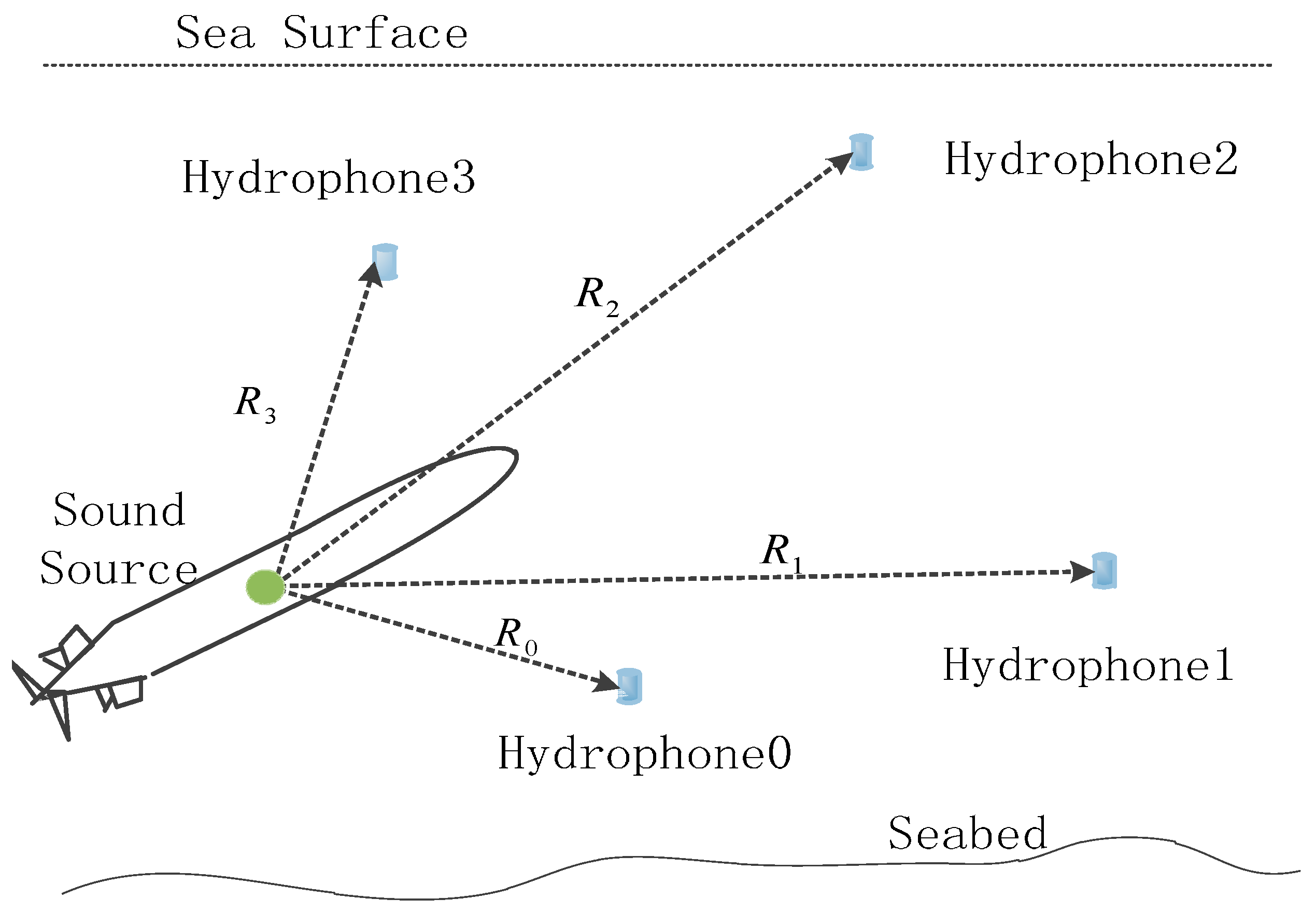
2.1. Principle of TDOA-Based LBL Underwater Positioning
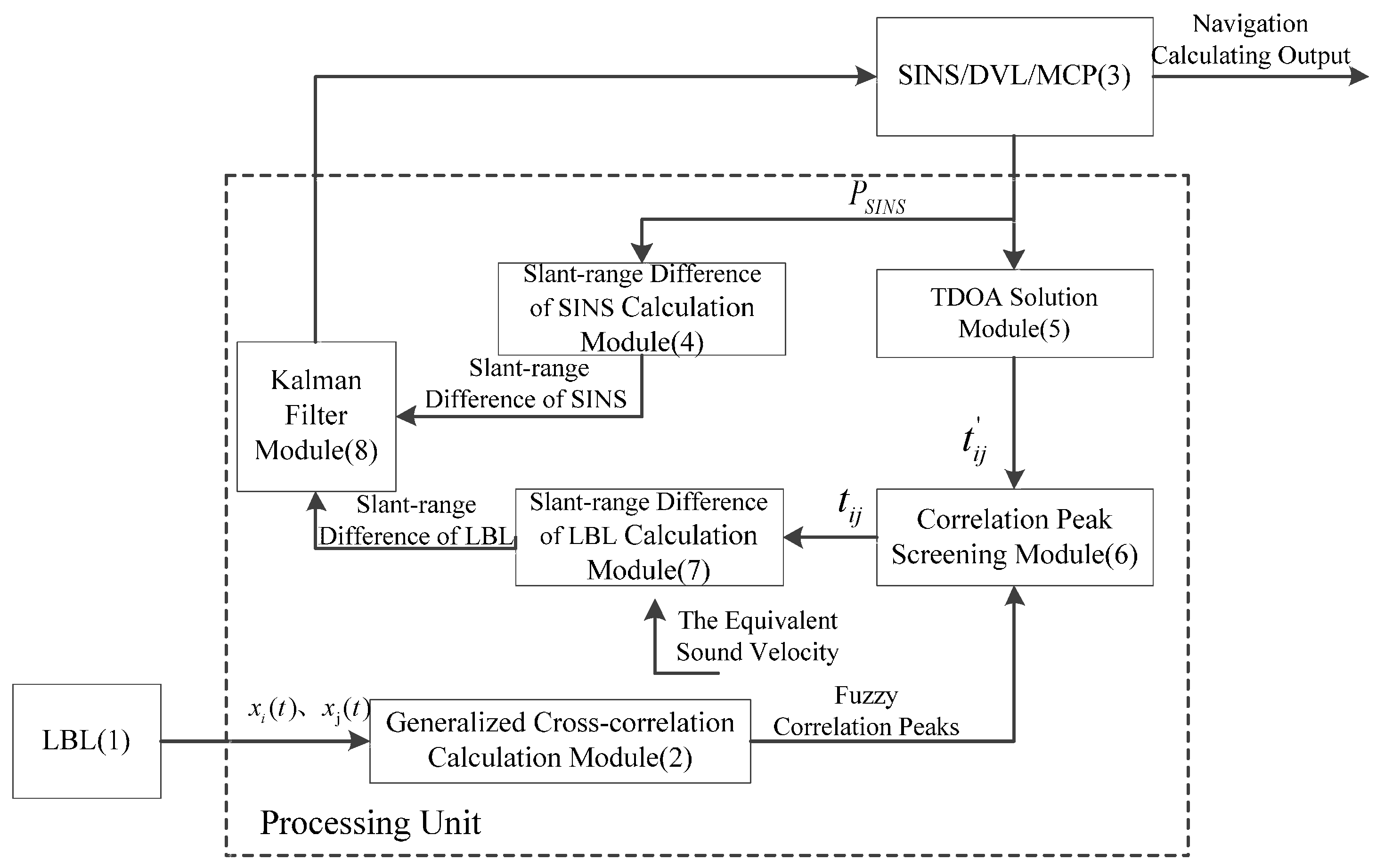
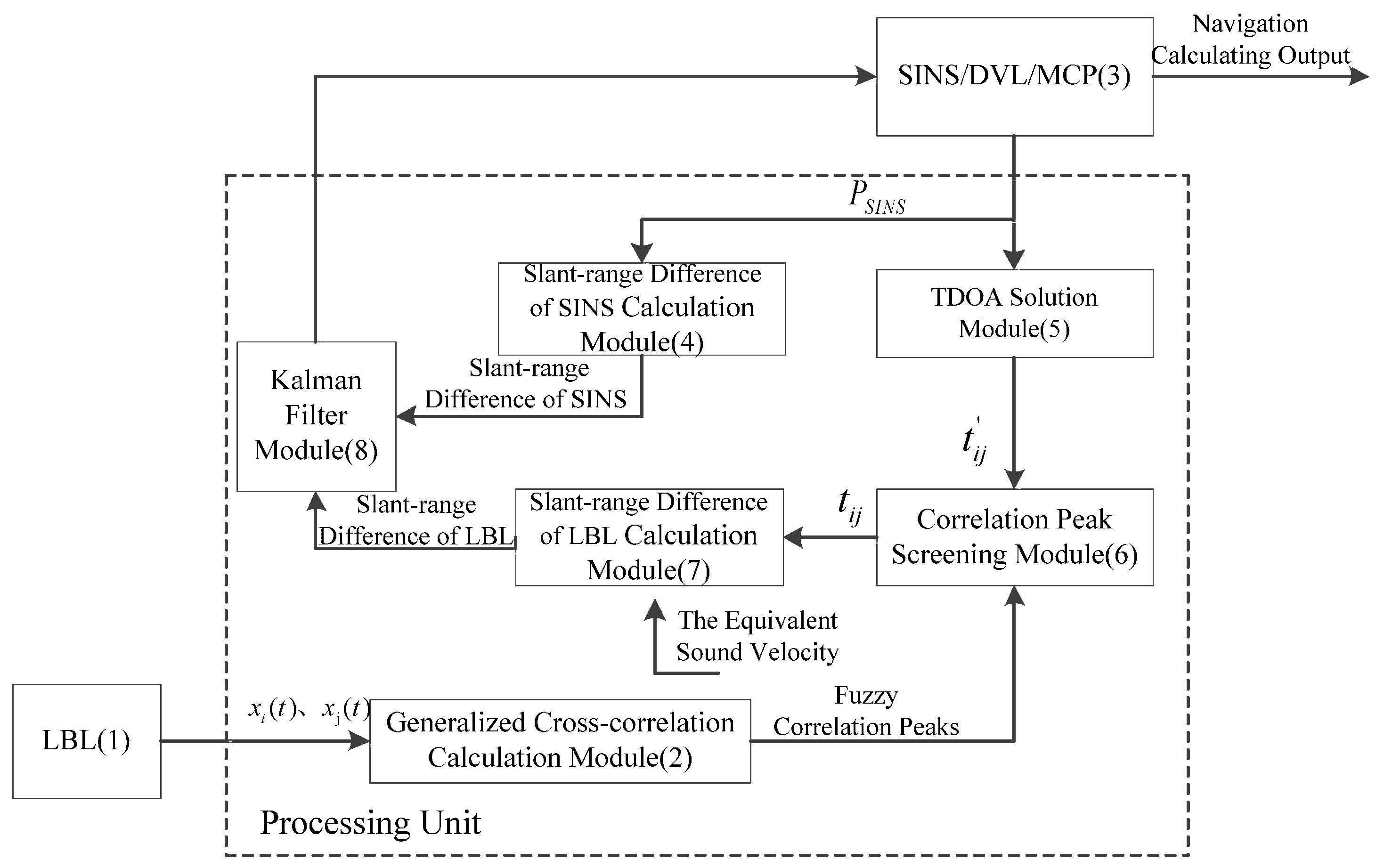
2.2. Working Principle of the System
3. TDOA Calculation Method of Underwater Acoustic Propagation Multipath
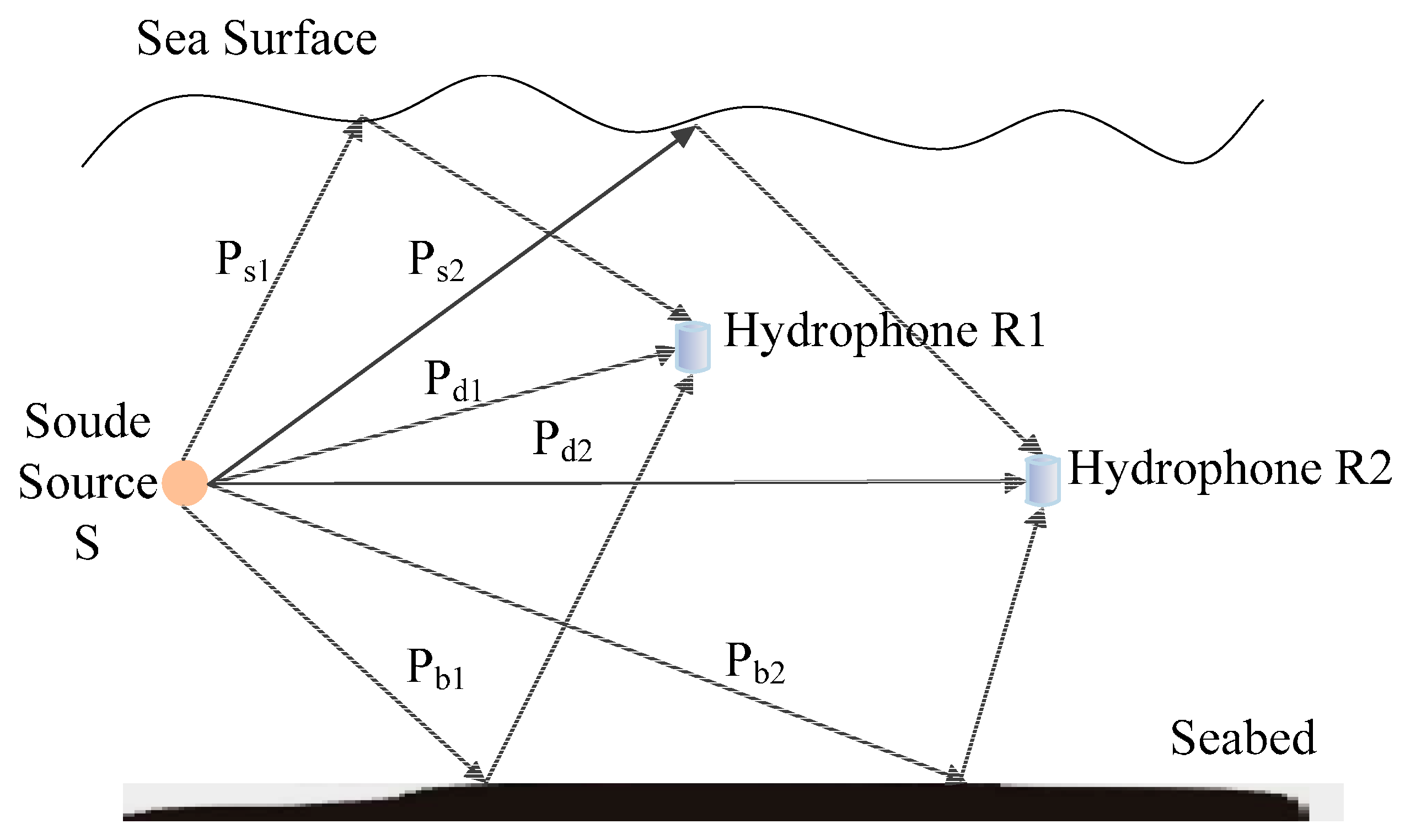
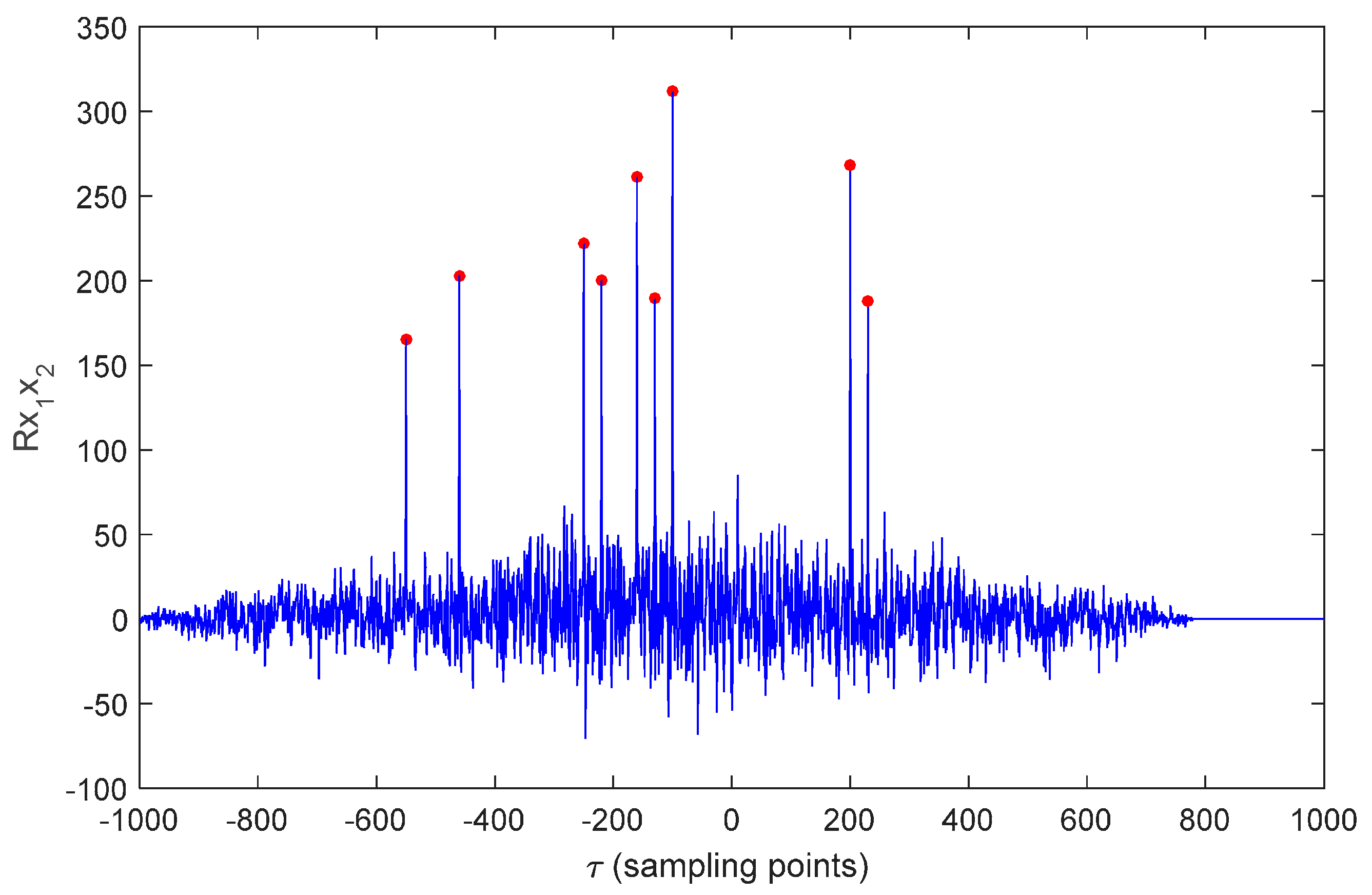
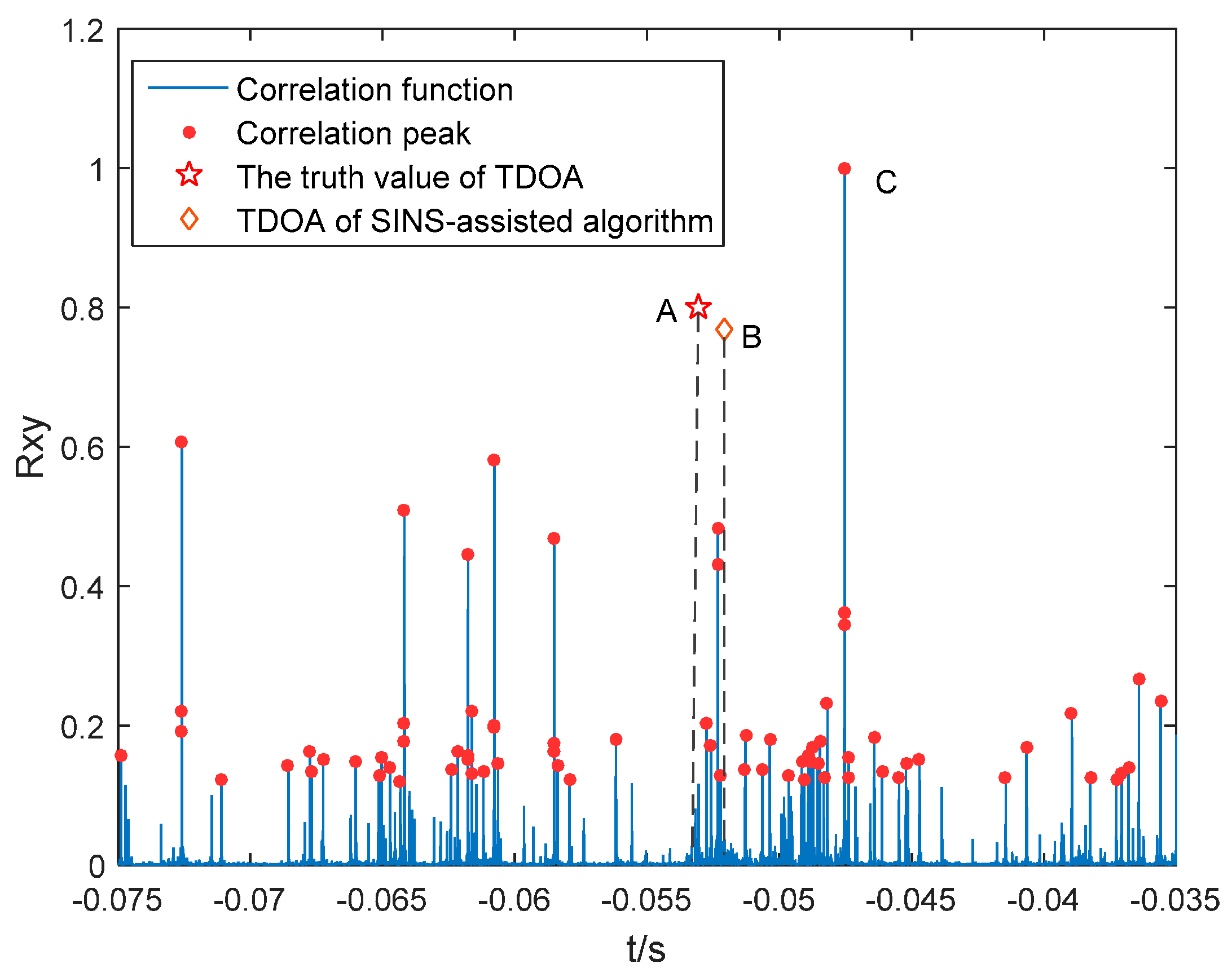
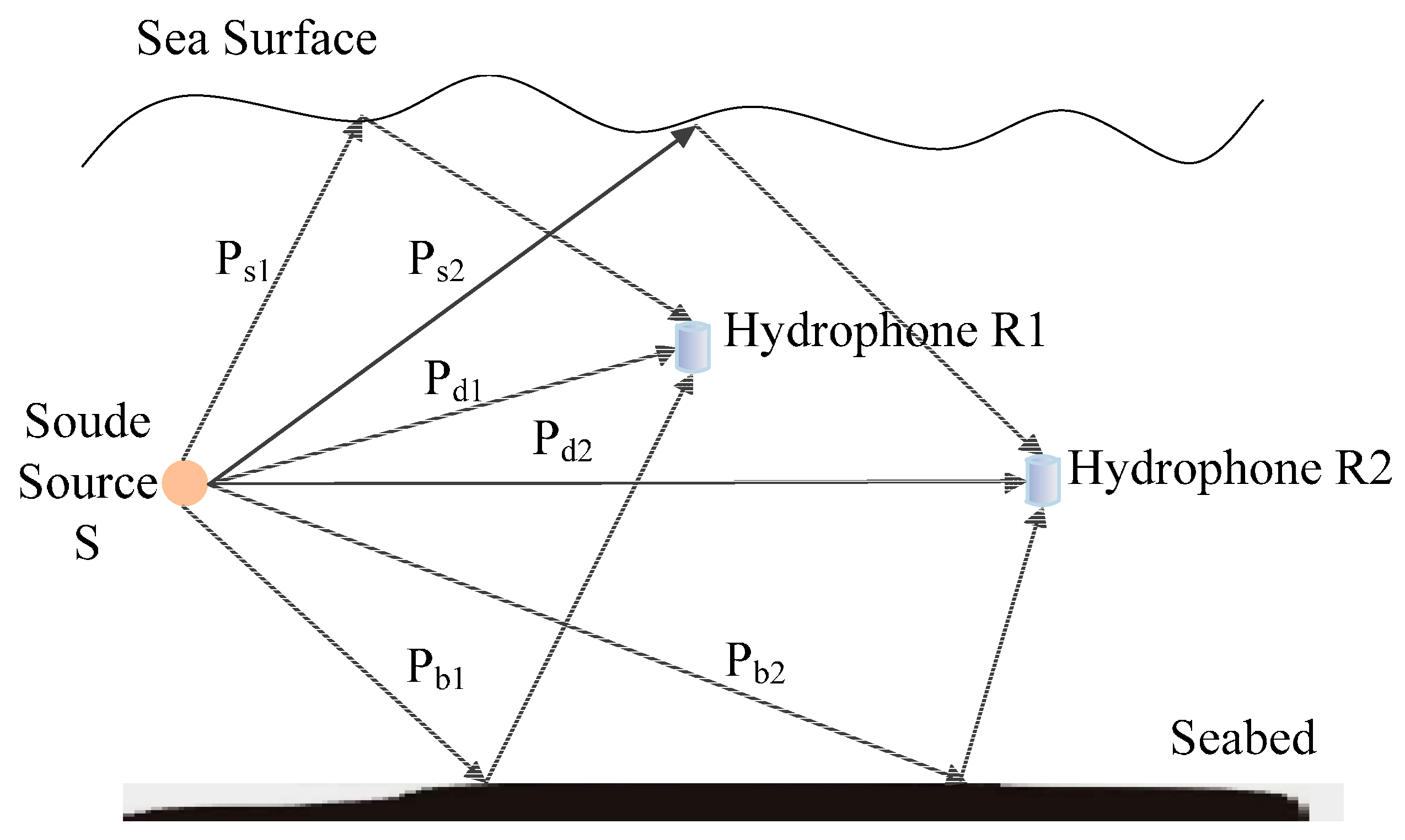
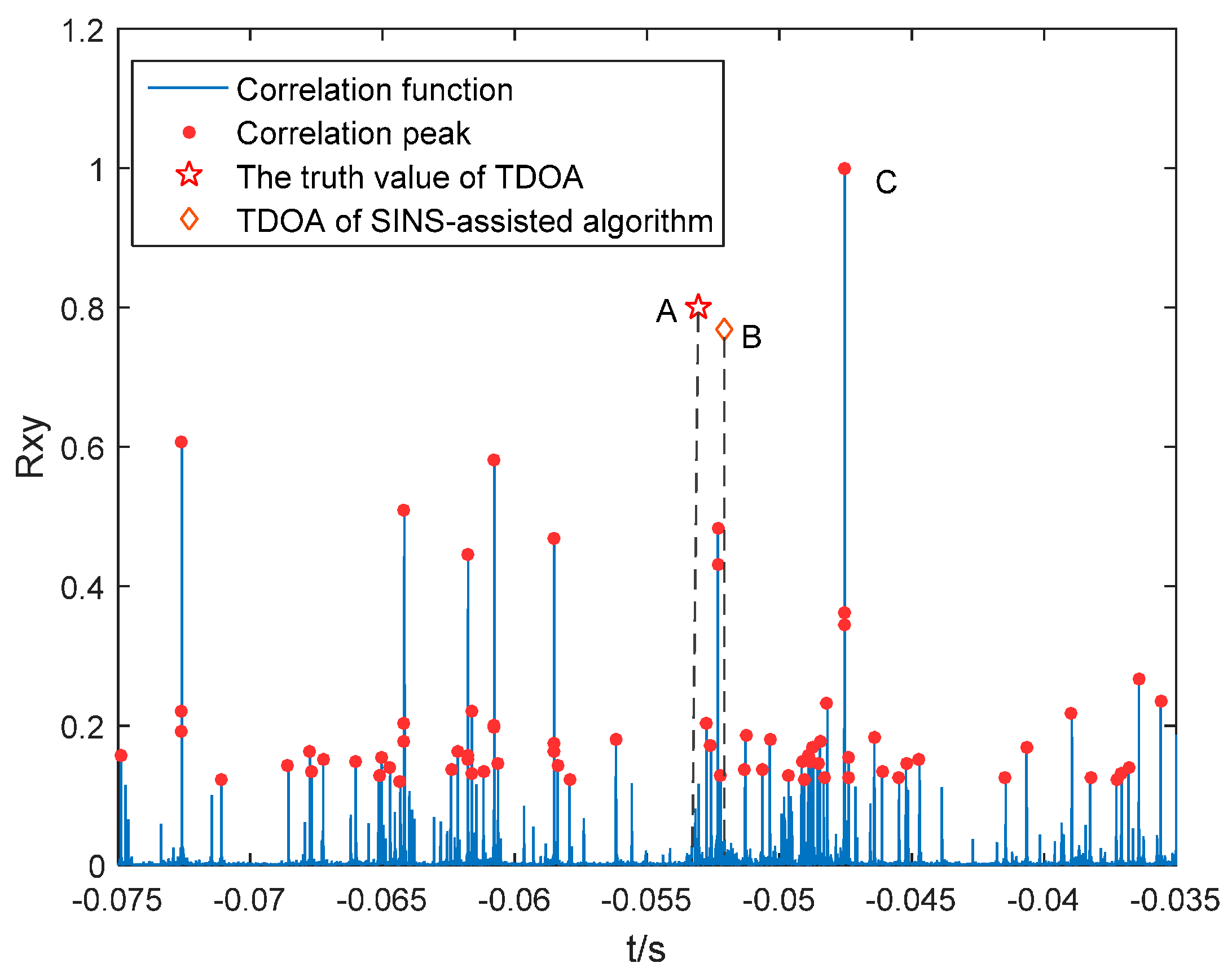
3.1. Fuzzy Correlation Peaks in Multipath Propagation
3.2. SINS-Assisted Method to Search the Optimum TDOA
4. SINS/LBL Tightly Coupled Model
4.1. Establishing LBL-Based Slant-Range Difference Model
4.2. State Equation and Measurement Equation of the SINS/LBL Tightly Coupled System
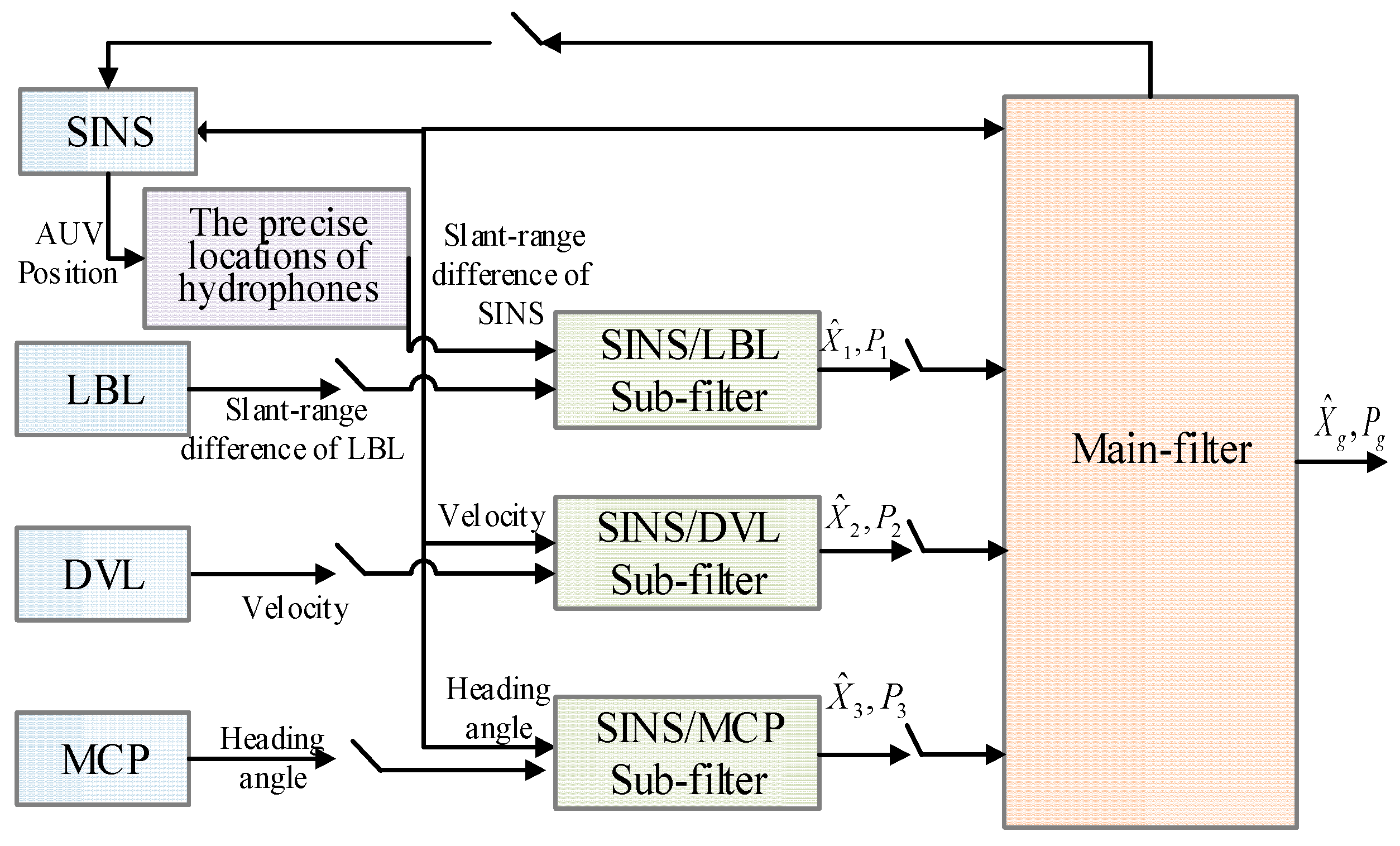
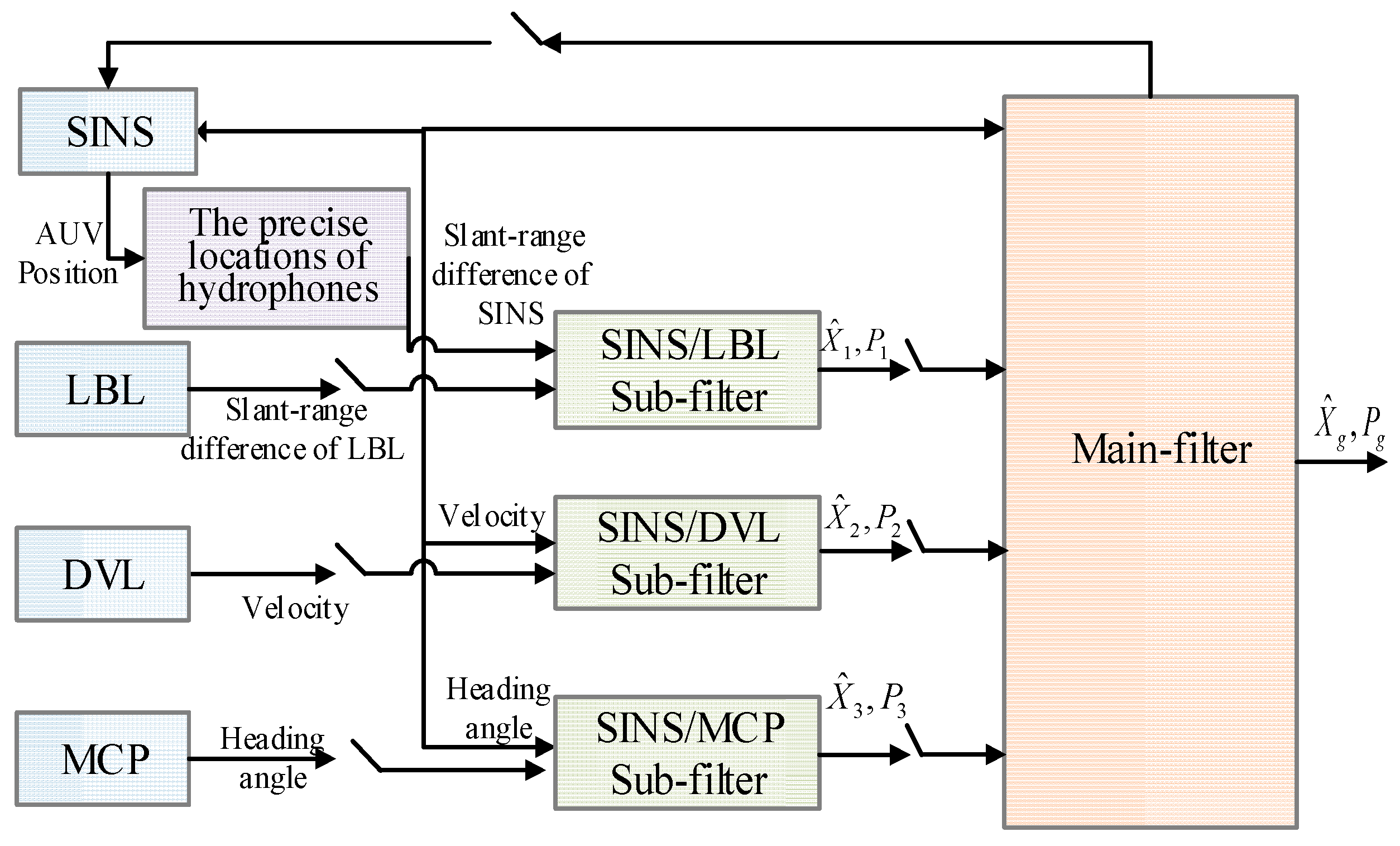
5. SINS/DVL/MCP/LBL Integration System
5.1. SINS/LBL Tightly Coupled Sub-System
5.2. SINS/DVL Sub-System
5.3. SINS/MCP Sub-System
6. Simulation and Experiment
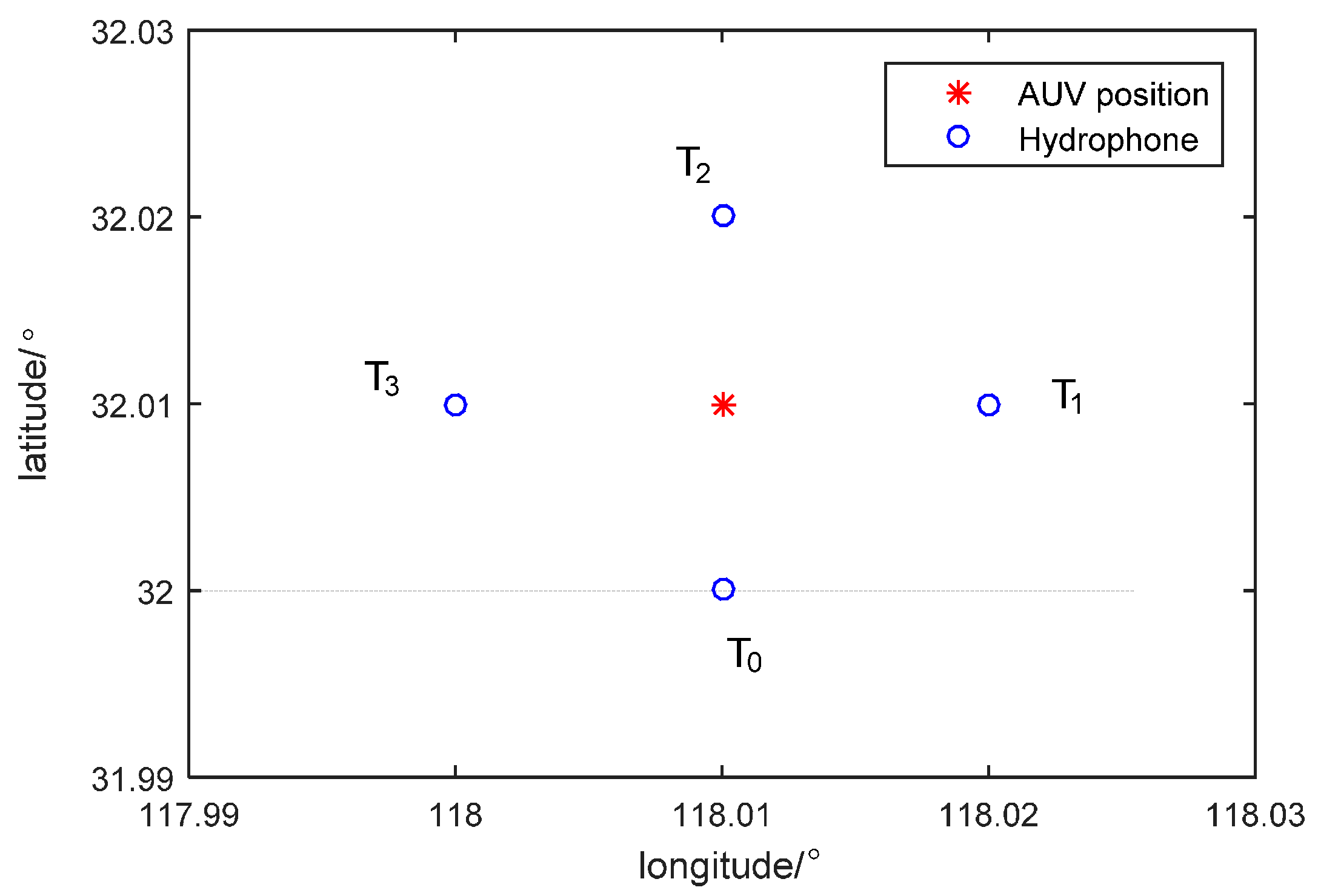
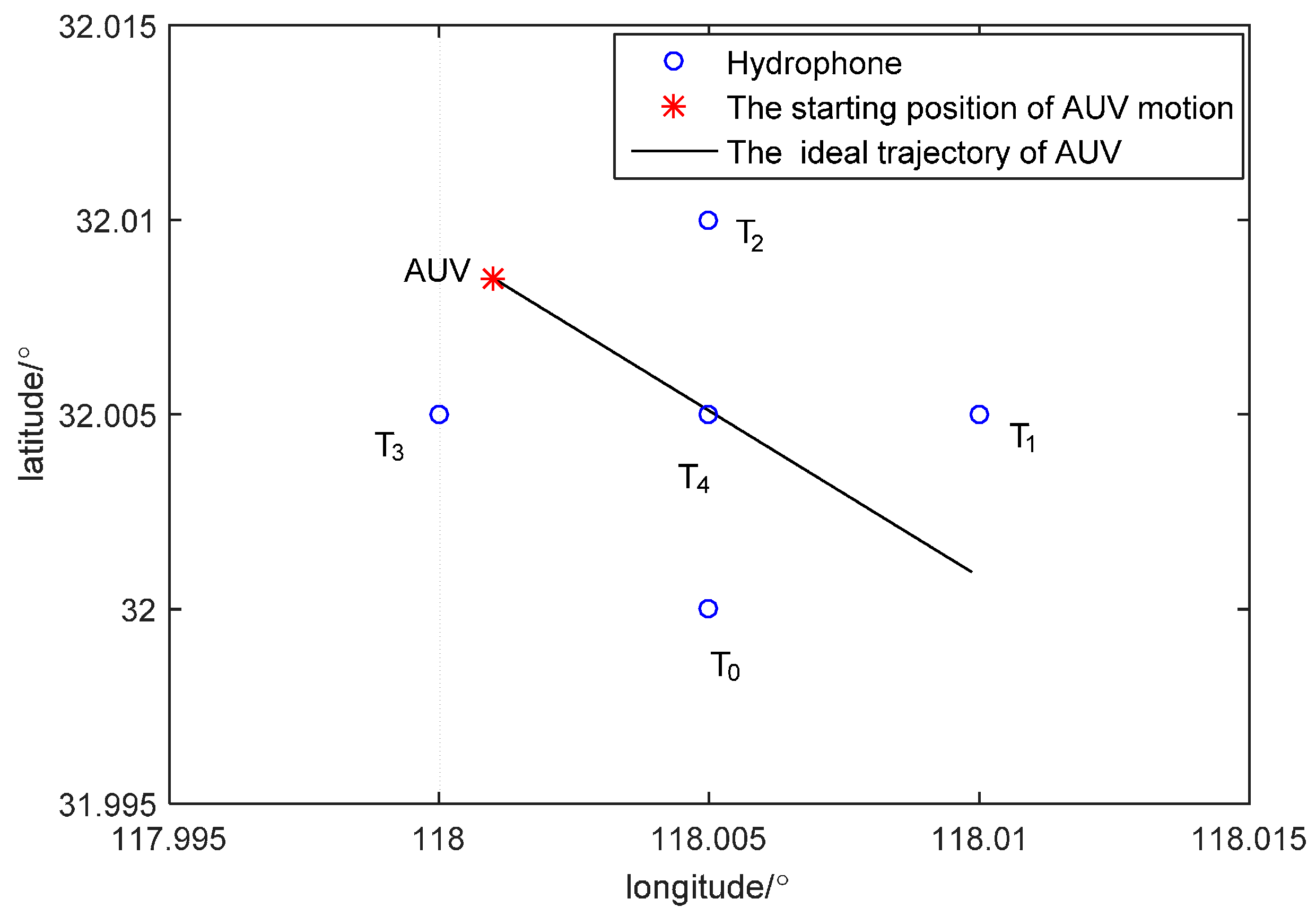
6.1. Simulation of SINS-Assisted LBL Tracking Optimum Time Difference under Static Conditions
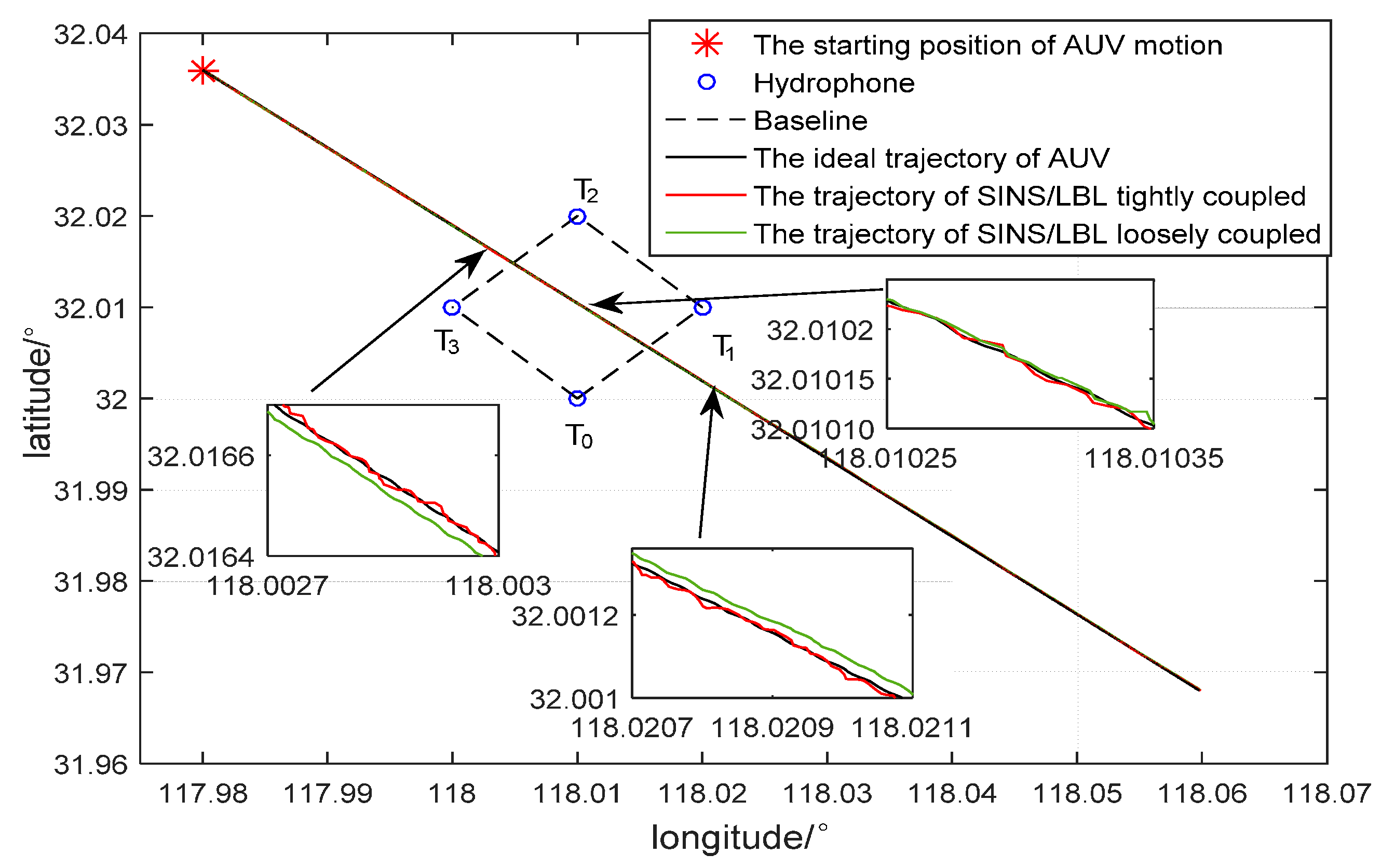
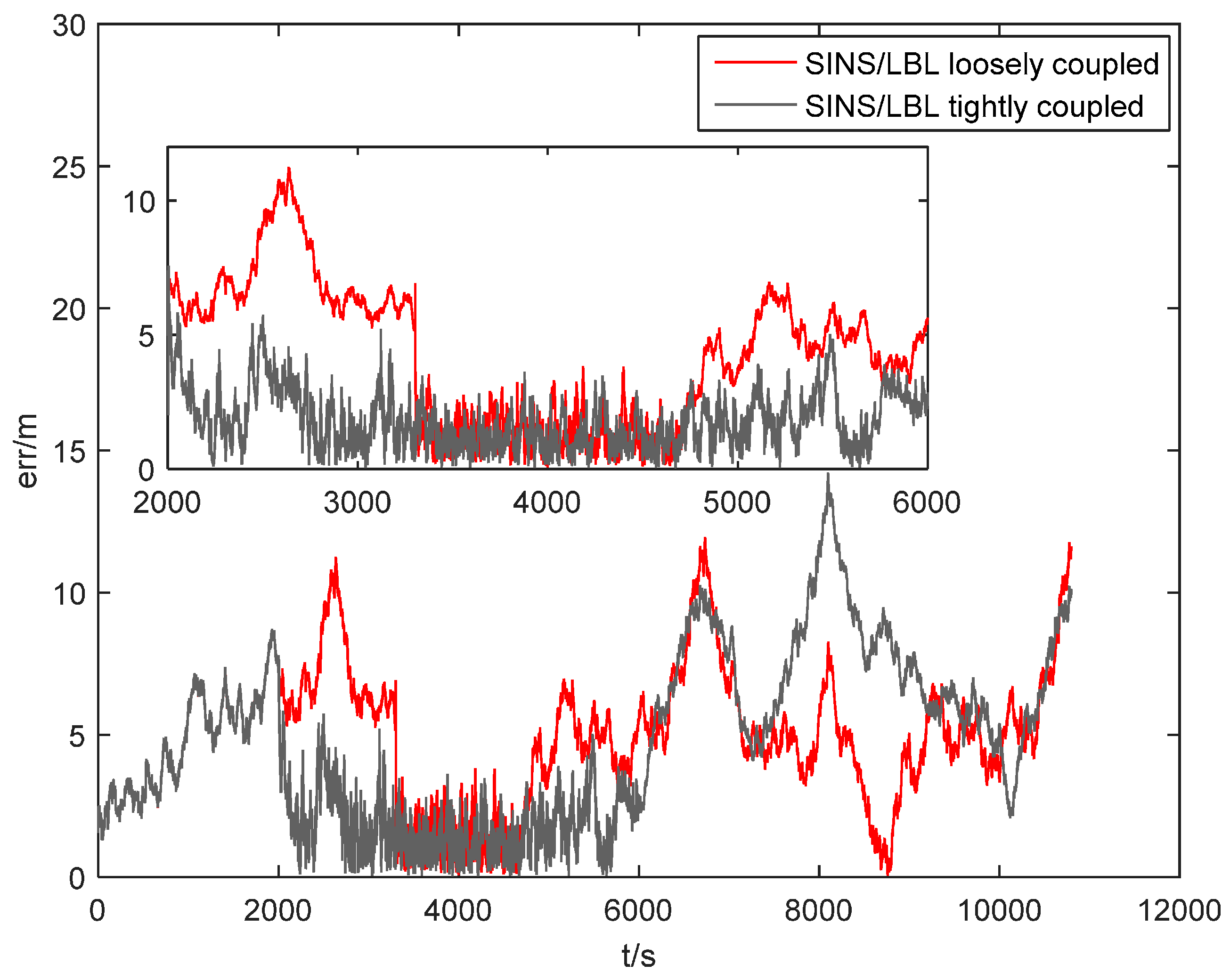
6.2. Simulation of SINS/LBL Tightly Coupled Algorithm
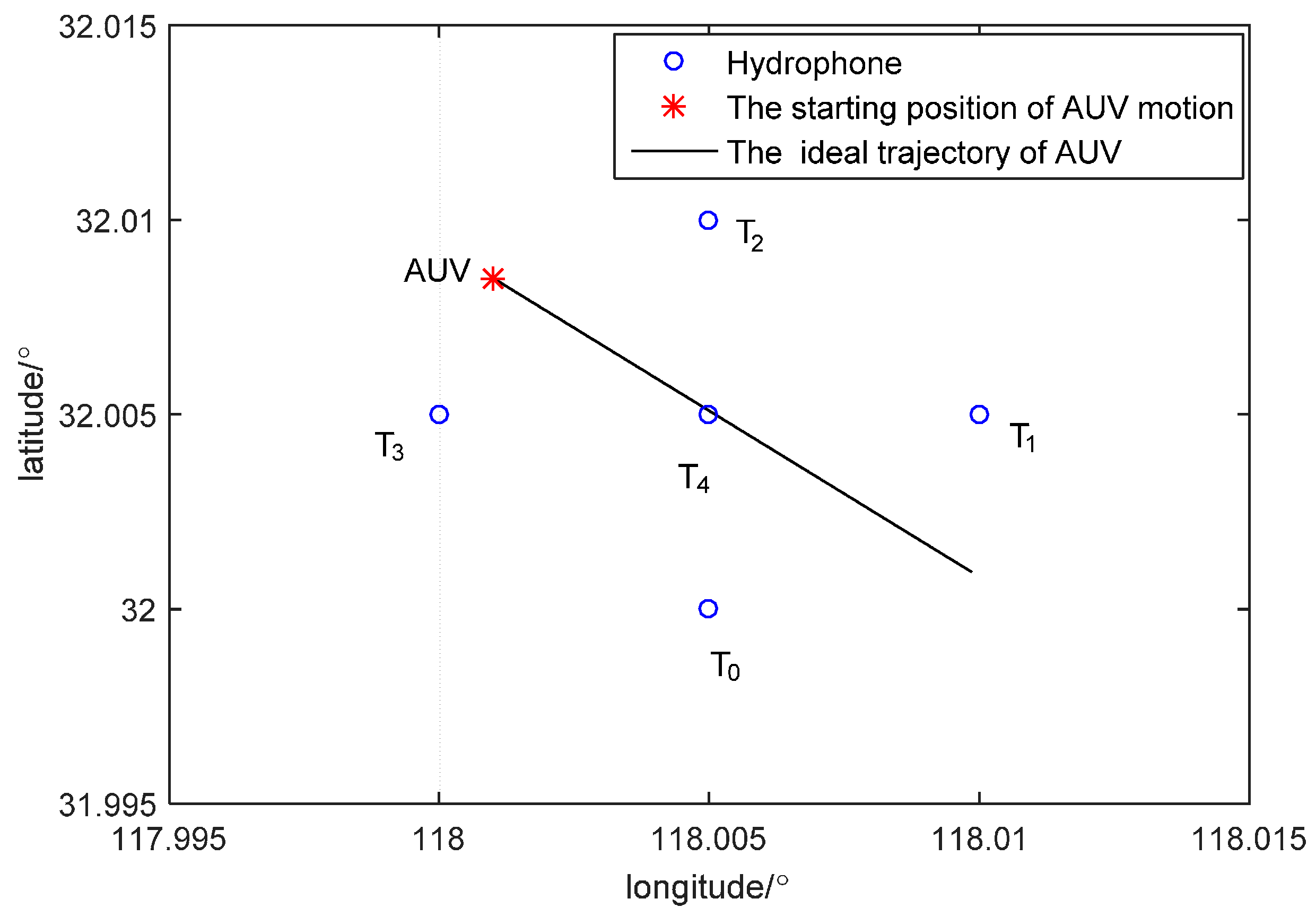
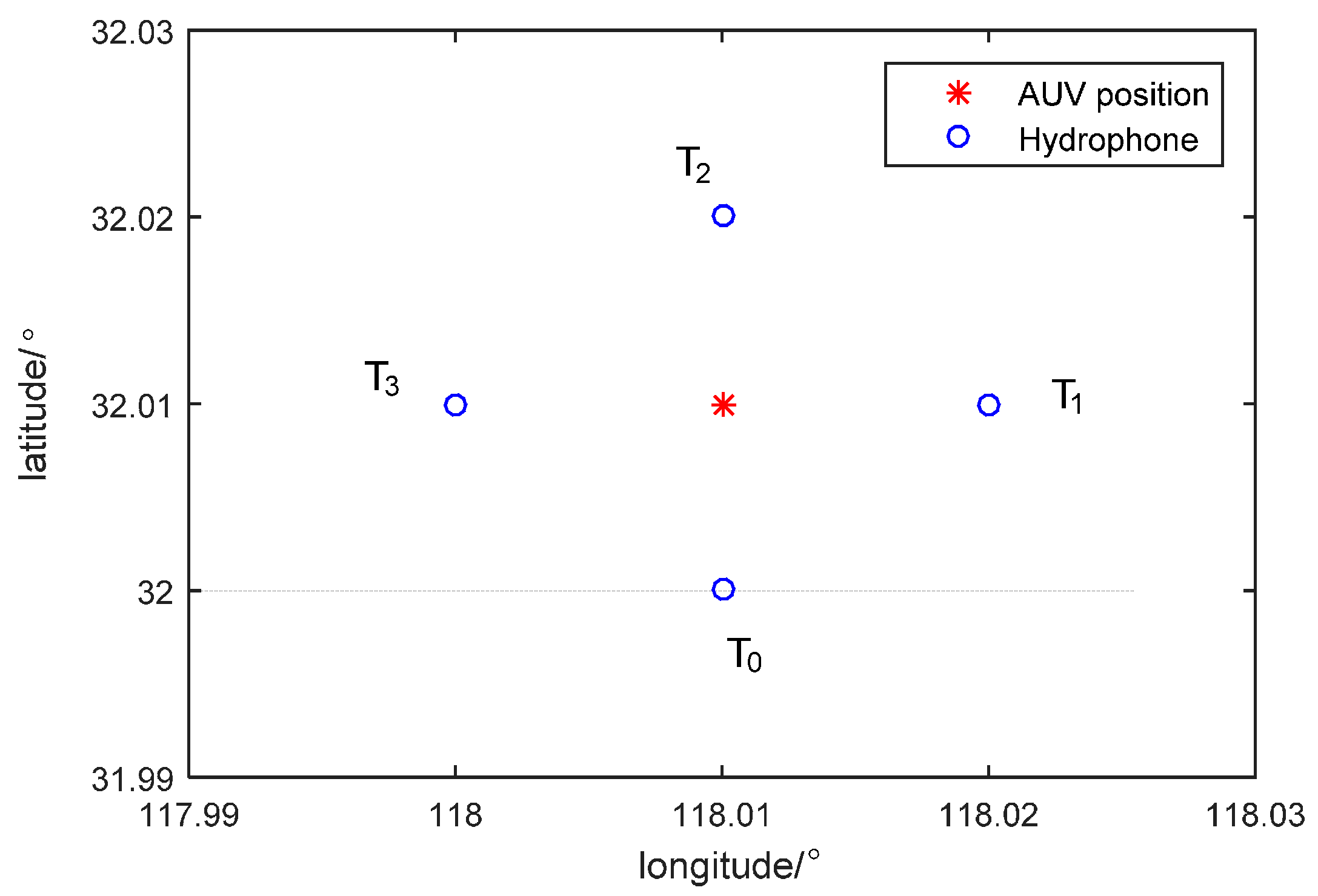
6.3. Simulation of AUV Dynamic Positioning Based on Federated Filter System
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Miller, P.A.; Farrell, J.A.; Zhao, Y.; Djapic, V. Autonomous Underwater Vehicle Navigation. IEEE J. Ocean. Eng. 2010, 35, 663–678. [Google Scholar] [CrossRef]
- Marco, D.B.; Healey, A.J. Command, control, and navigation experimental results with the NPS ARIES AUV. IEEE J. Ocean. Eng. 2001, 26, 466–476. [Google Scholar] [CrossRef]
- Morgado, M.; Oliveira, P.; Silvestre, C. Tightly coupled ultrashort baseline and inertial navigation system for underwater vehicles: An experimental validation. J. Field Robot. 2013, 30, 142–170. [Google Scholar] [CrossRef]
- Jordan Stanway, M. Water profile navigation with an Acoustic Doppler Current Profiler. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–5.
- Jakuba, M.V.; Roman, C.N.; Singh, H.; Murphy, C.; Kunz, C.; Willis, C.; Sato, T.; Sohn, R.A. Long-Baseline Acoustic Navigation for Under-Ice Autonomous Underwater Vehicle Operations. J. Field Robot. 2008, 25, 861–879. [Google Scholar] [CrossRef]
- Ji, D.; Liu, J.; Chen, X.; Feng, X. Fast and accurate AUV positioning using acoustic beacons of LBL system. Tech. Acoust. 2009, 28, 476–479. [Google Scholar]
- Hegrenæs, Ø.; Gade, K.; Hagen, O.K.; Hagen, P.E. Underwater Transponder Positioning and Navigation of Autonomous Underwater Vehicles. In Proceedings of the OCEANS 2009, MTS/IEEE Biloxi—Marine Technology for Our Future: Global and Local Challenges, Biloxi, MS, USA, 26–29 October 2009.
- Fan, X.; Zhang, F.-B.; Zhang, Y.-Q. Information Fusion Technology and its Application to Multi-sensor Integrated Navigation System for Autonomous Underwater Vehicle. Fire Control Command Control 2011, 36, 78–81. [Google Scholar]
- Lee, P.; Jun, B.; Choi, H.T.; Hong, S.-W. An integrated navigation systems for underwater vehicles based on inertial sensors and pseudo LBL acoustic transponders. In Proceedings of OCEANS 2005 MTS/IEEE, Washington, DC, USA, 19–23 September 2005; pp. 555–562.
- An, L.; Chen, L.-J.; Fang, S.-L. Investigation on Correlation Peaks Ambiguity and Ambiguity Elimination Algorithm in Underwater Acoustic Passive Localization. J. Electron. Inf. Technol. 2013, 35, 2948–2953. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater Acoustic Communication Channels: Propagation Models and Statistical Characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Zhang, T.; Chen, L.; Li, Y. AUV Underwater Positioning Algorithm Based on Interactive Assistance of SINS and LBL. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Lee, P.; Jun, B.; Kim, K.; Lee, J.; Aoki, T.; Hyakudome, T. Simulation of an Inertial Acoustic Navigation System With Range Aiding for an Autonomous Underwater Vehicle. IEEE J. Ocean. Eng. 2007, 32, 327–345. [Google Scholar] [CrossRef]
- Lee, P.; Jun, B.; Hong, S.; Lim, Y.-K.; Yang, S.-I. Pseudo Long Base Line (LBL) Hybrid Navigation Algorithm Based on Inertial Measurement Unit with Two Range Transducers. J. Ocean Eng. Technol. 2005, 19, 71–77. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TDOA of Two Hydrophones | Error of Traditional Algorithm/s | Error of SINS-Assisted Algorithm/s |
|---|---|---|
| 0.0056 | 0.0010 | |
| 0.0055 | −0.0009 | |
| 0.0034 | 0.0009 |
| Slant-Range Difference between Two Hydrophones and Sound Source | Error of Traditional Algorithm/m | Error of SINS-Assisted Algorithm/m |
|---|---|---|
| 8.0626 | 1.4379 | |
| 8.8442 | −1.2836 | |
| 5.0872 | 1.3466 |
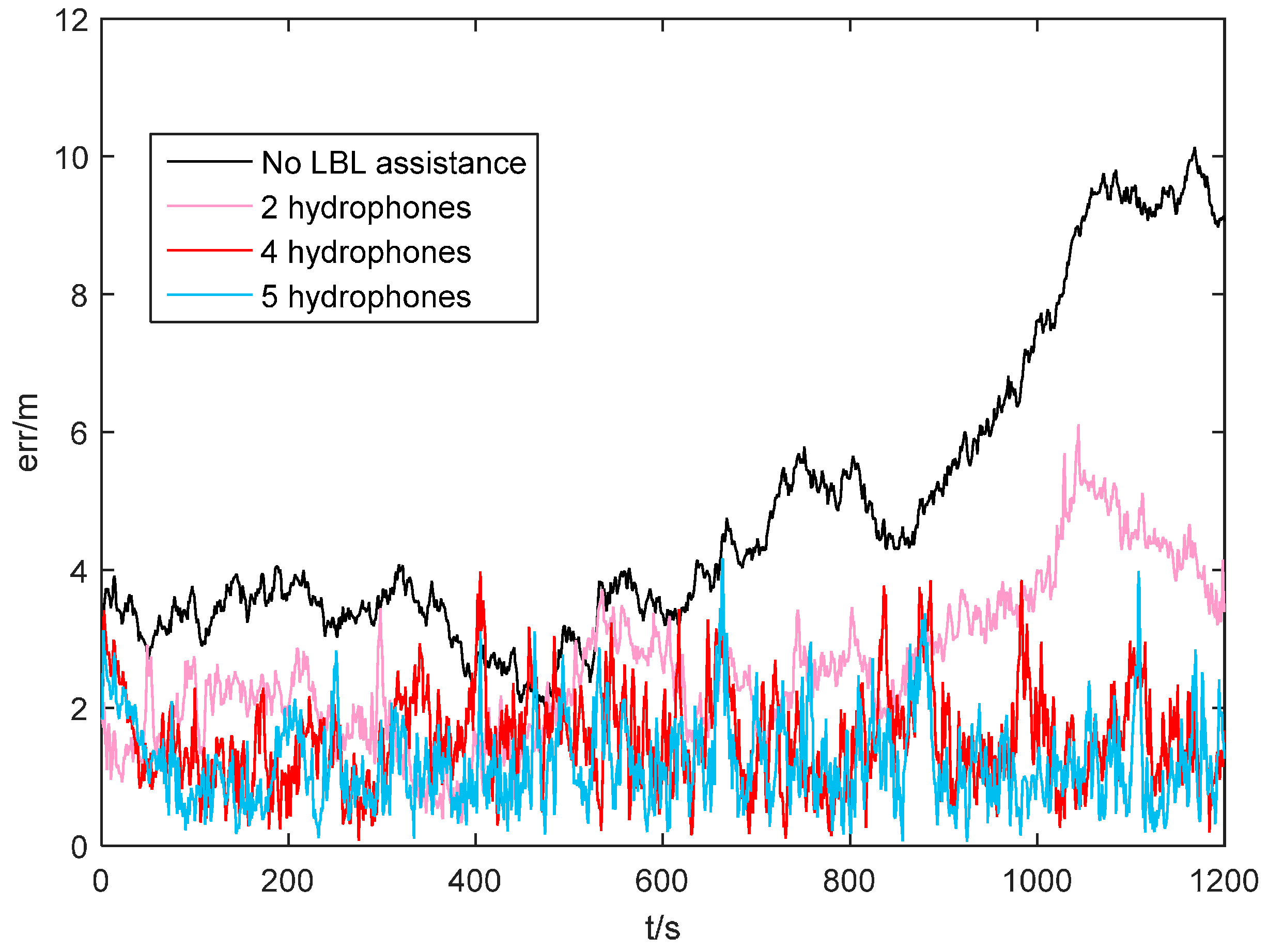
| No LBL Assistance | 2 Hydrophones | 4 Hydrophones | 5 Hydrophones | |
|---|---|---|---|---|
| Mean /m | 4.8300 | 2.5760 | 1.5420 | 1.1900 |
| Variance /m | 2.1890 | 1.1200 | 0.7039 | 0.6336 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Shi, H.; Chen, L.; Li, Y.; Tong, J. AUV Positioning Method Based on Tightly Coupled SINS/LBL for Underwater Acoustic Multipath Propagation. Sensors 2016, 16, 357. https://doi.org/10.3390/s16030357
Zhang T, Shi H, Chen L, Li Y, Tong J. AUV Positioning Method Based on Tightly Coupled SINS/LBL for Underwater Acoustic Multipath Propagation. Sensors. 2016; 16(3):357. https://doi.org/10.3390/s16030357
Chicago/Turabian StyleZhang, Tao, Hongfei Shi, Liping Chen, Yao Li, and Jinwu Tong. 2016. "AUV Positioning Method Based on Tightly Coupled SINS/LBL for Underwater Acoustic Multipath Propagation" Sensors 16, no. 3: 357. https://doi.org/10.3390/s16030357
APA StyleZhang, T., Shi, H., Chen, L., Li, Y., & Tong, J. (2016). AUV Positioning Method Based on Tightly Coupled SINS/LBL for Underwater Acoustic Multipath Propagation. Sensors, 16(3), 357. https://doi.org/10.3390/s16030357