
Pressure Mapping Mat for Tele-Home Care Applications

 ,
,  ,
,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Fabrication of the Single-Layer Textile Pressure Sensor
2.2. Pressure Sensing Model
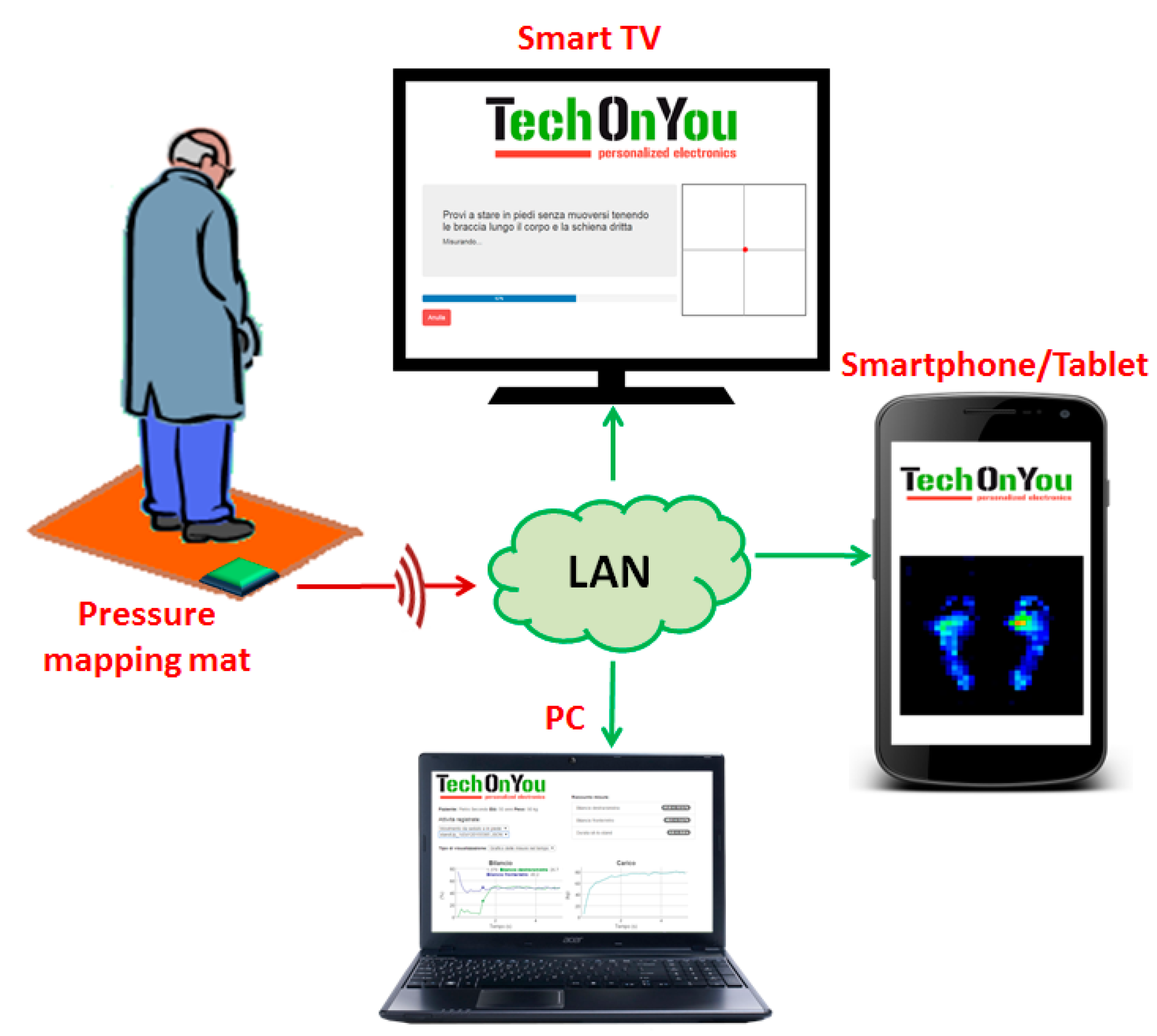
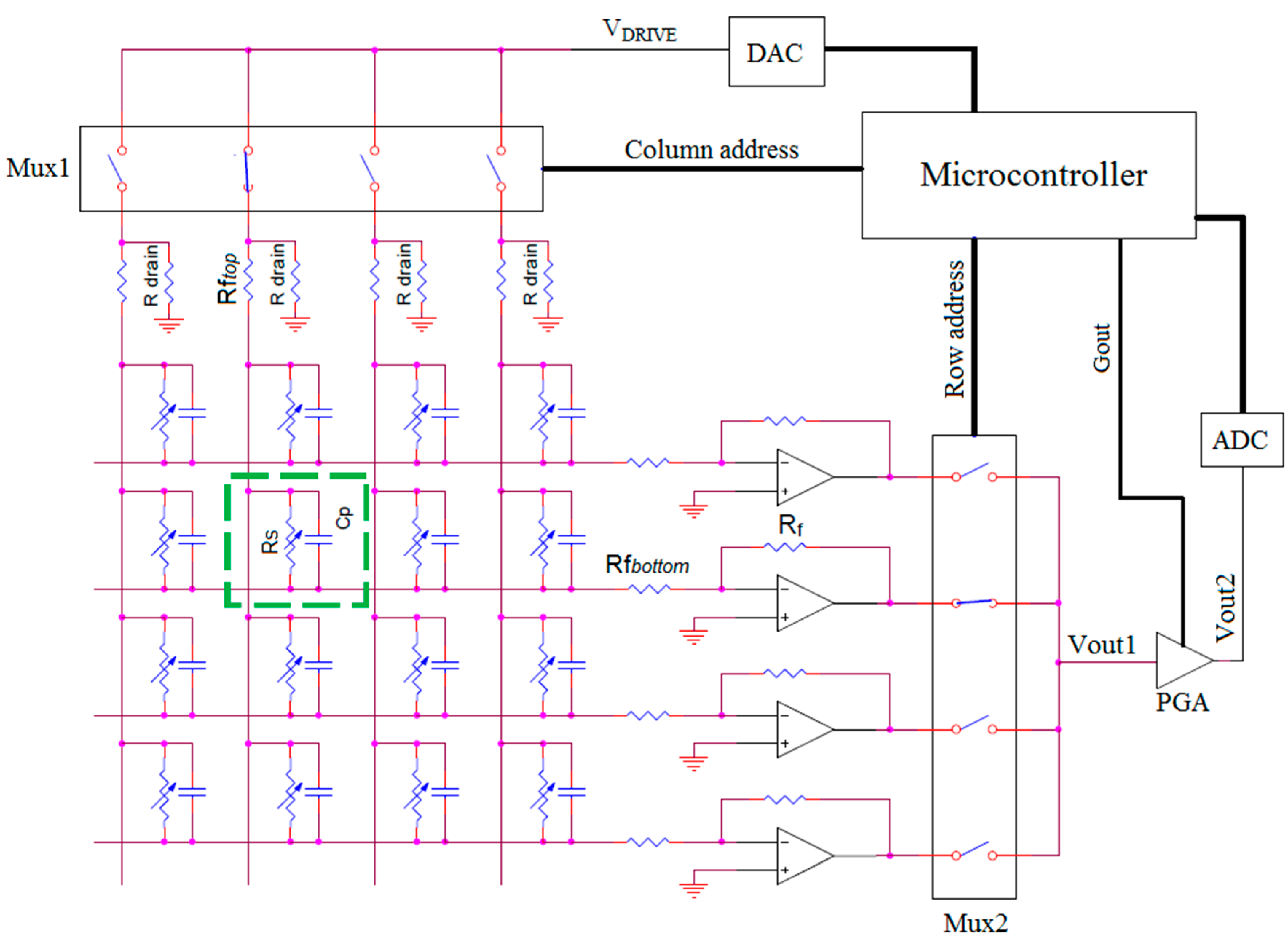
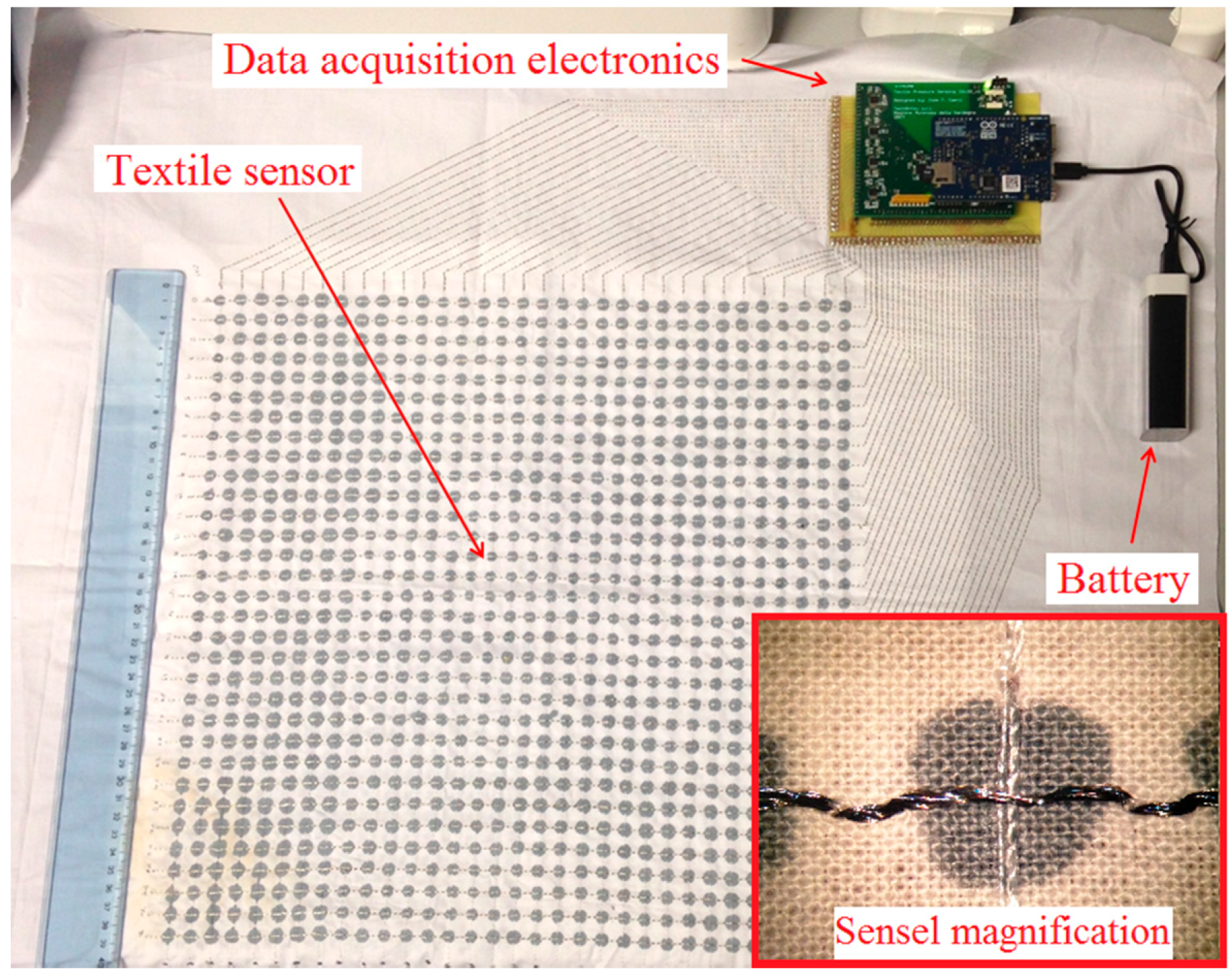
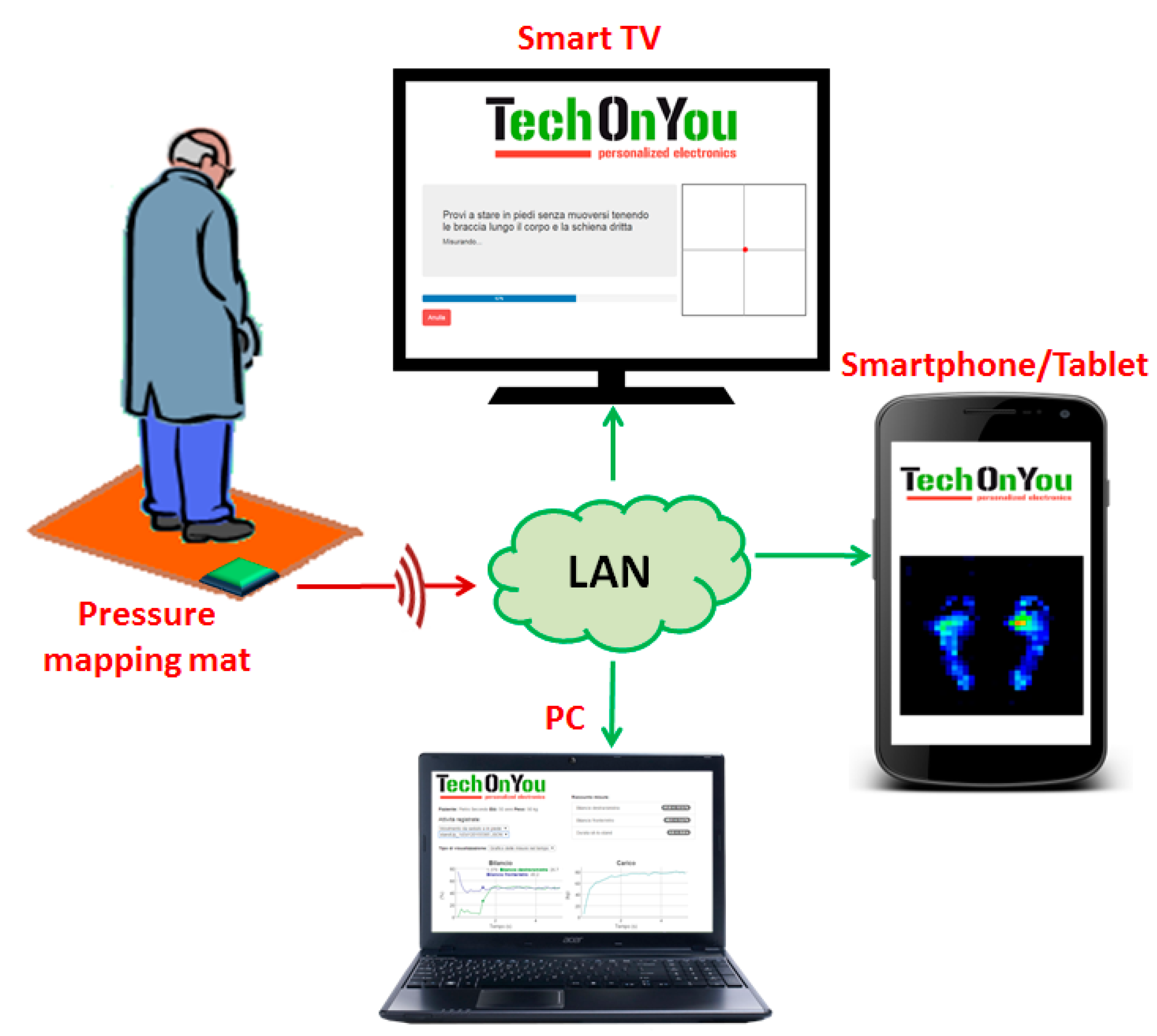
2.3. Data Acquisition Electronics
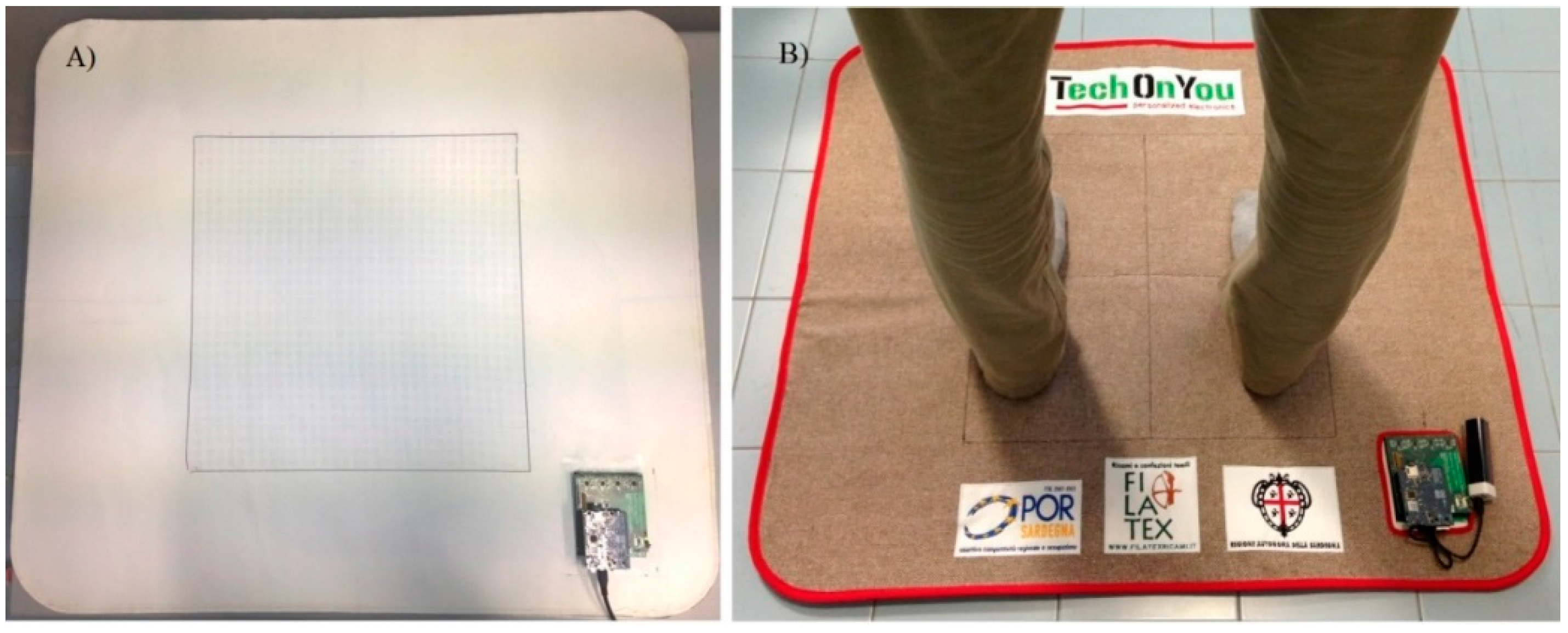
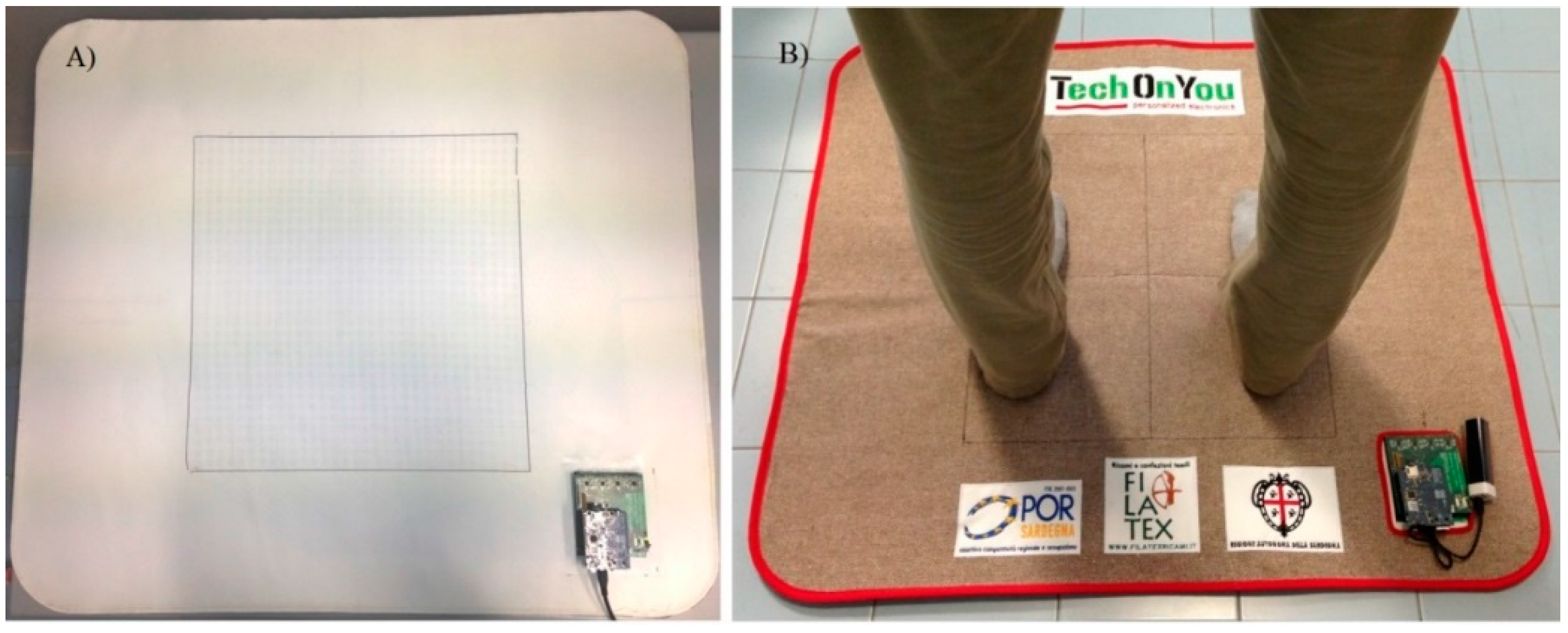
2.4. Fabrication of the Pressure Sensitive Mat Prototype
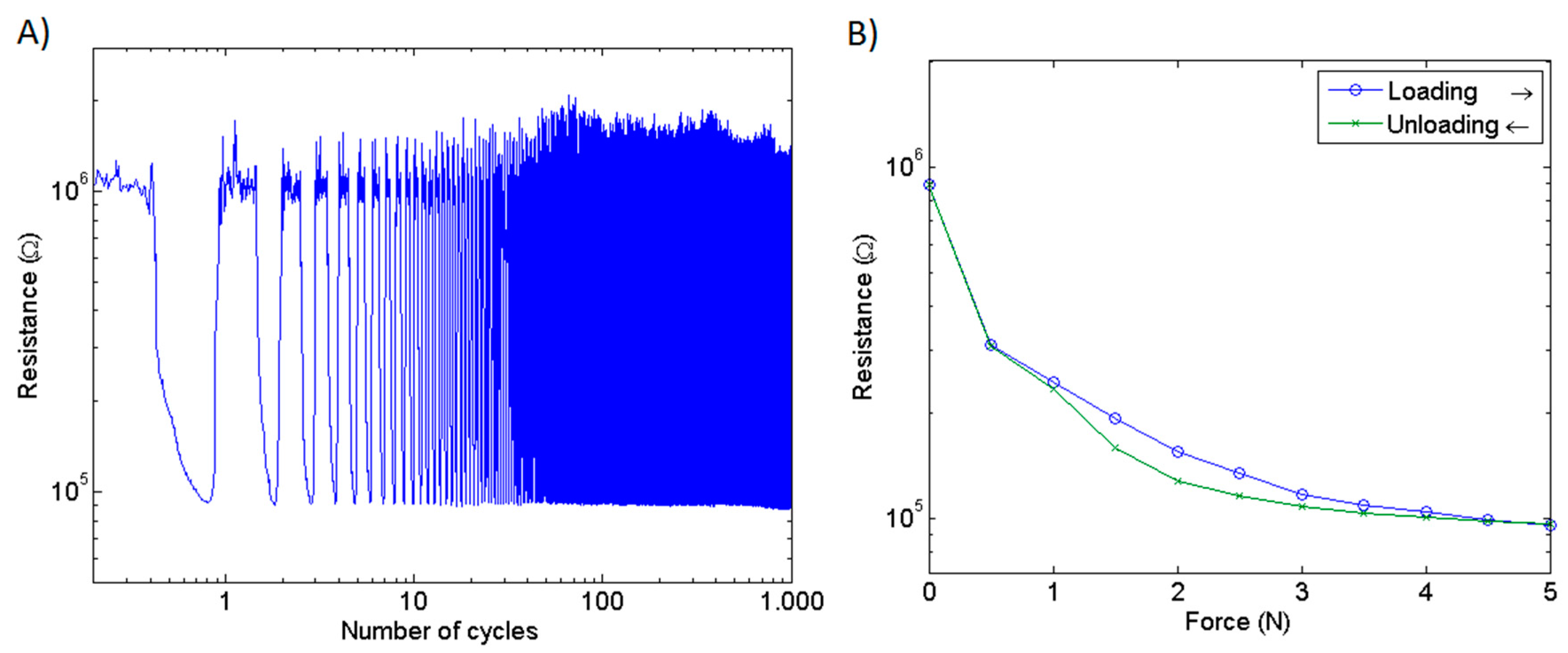
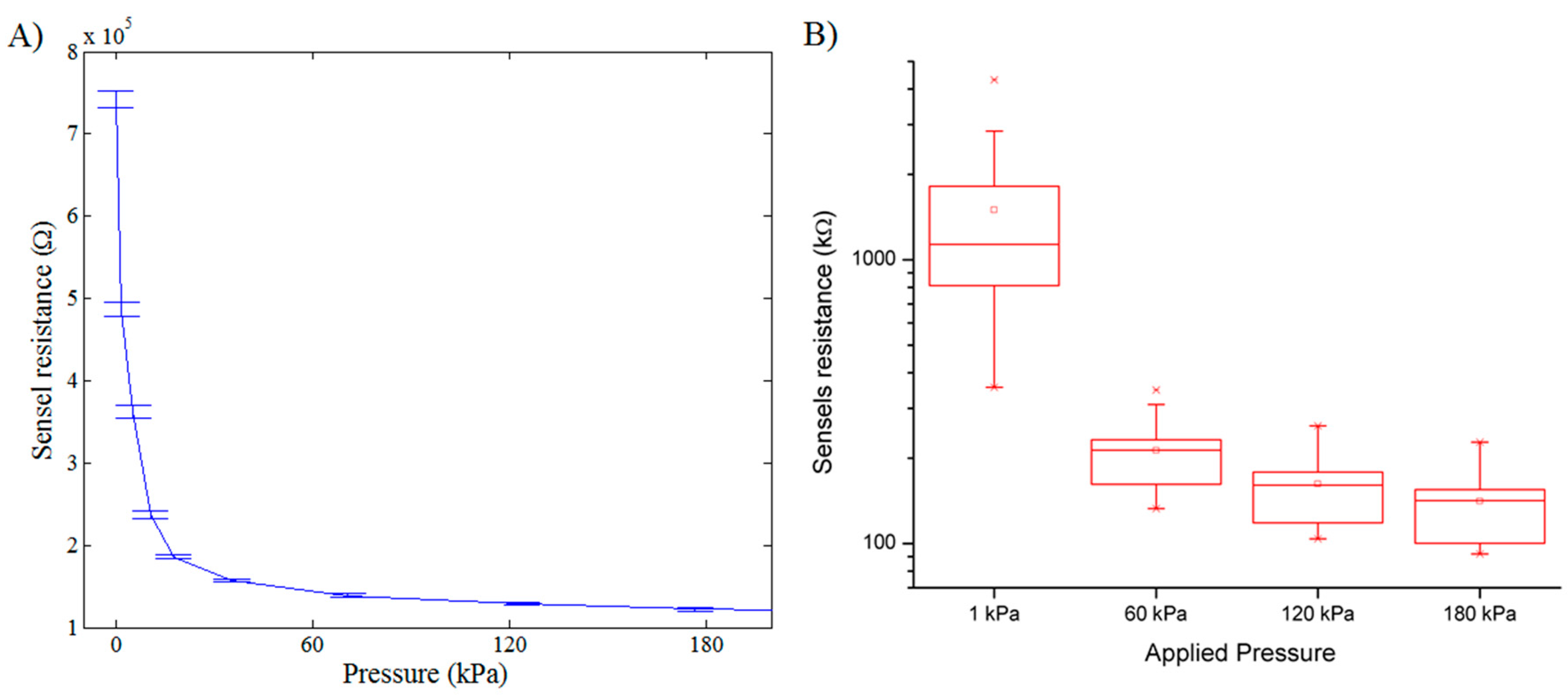
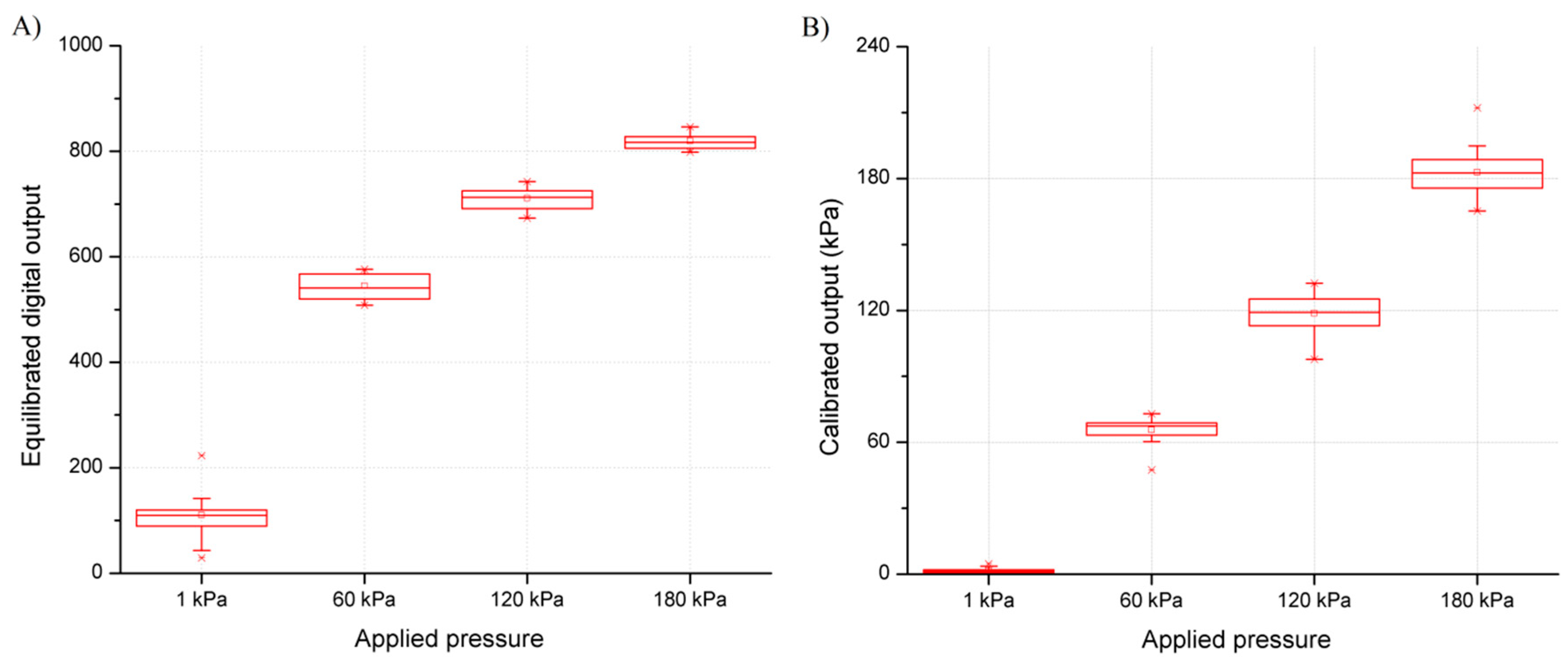
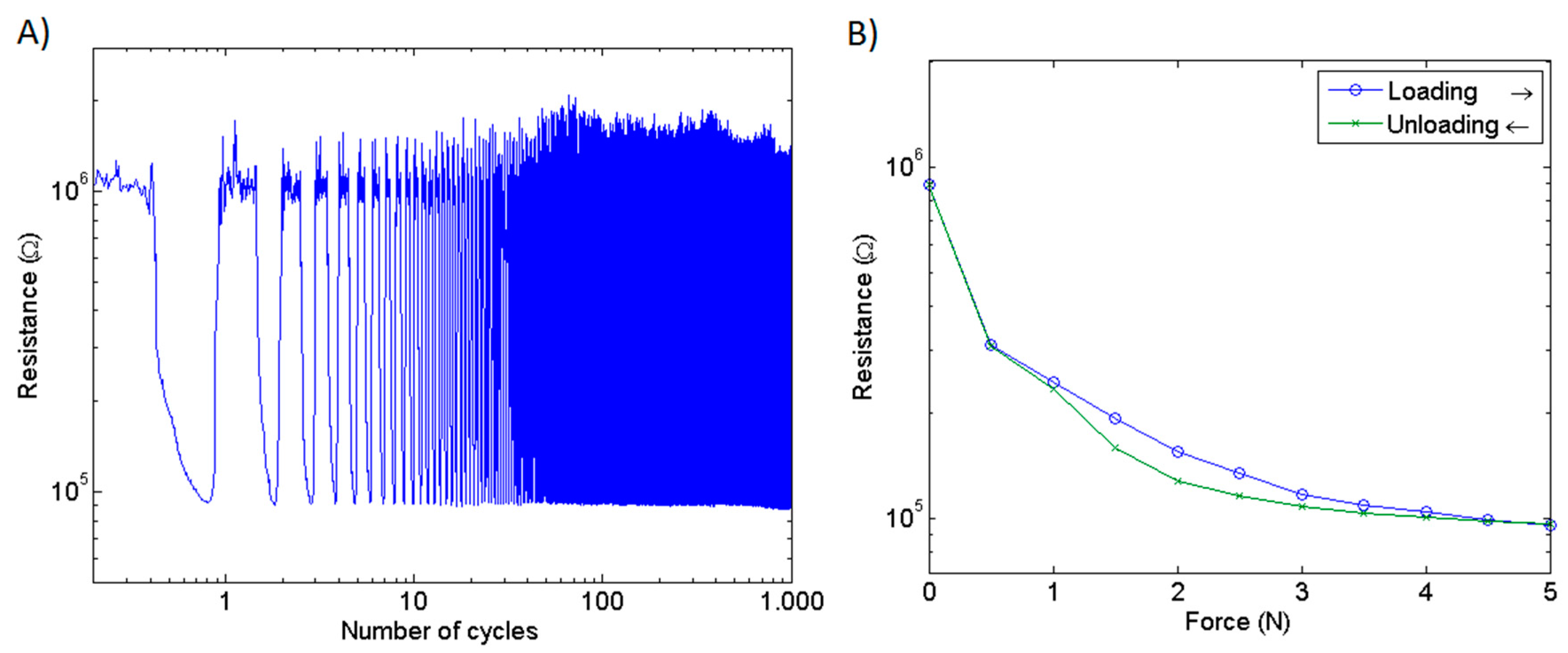
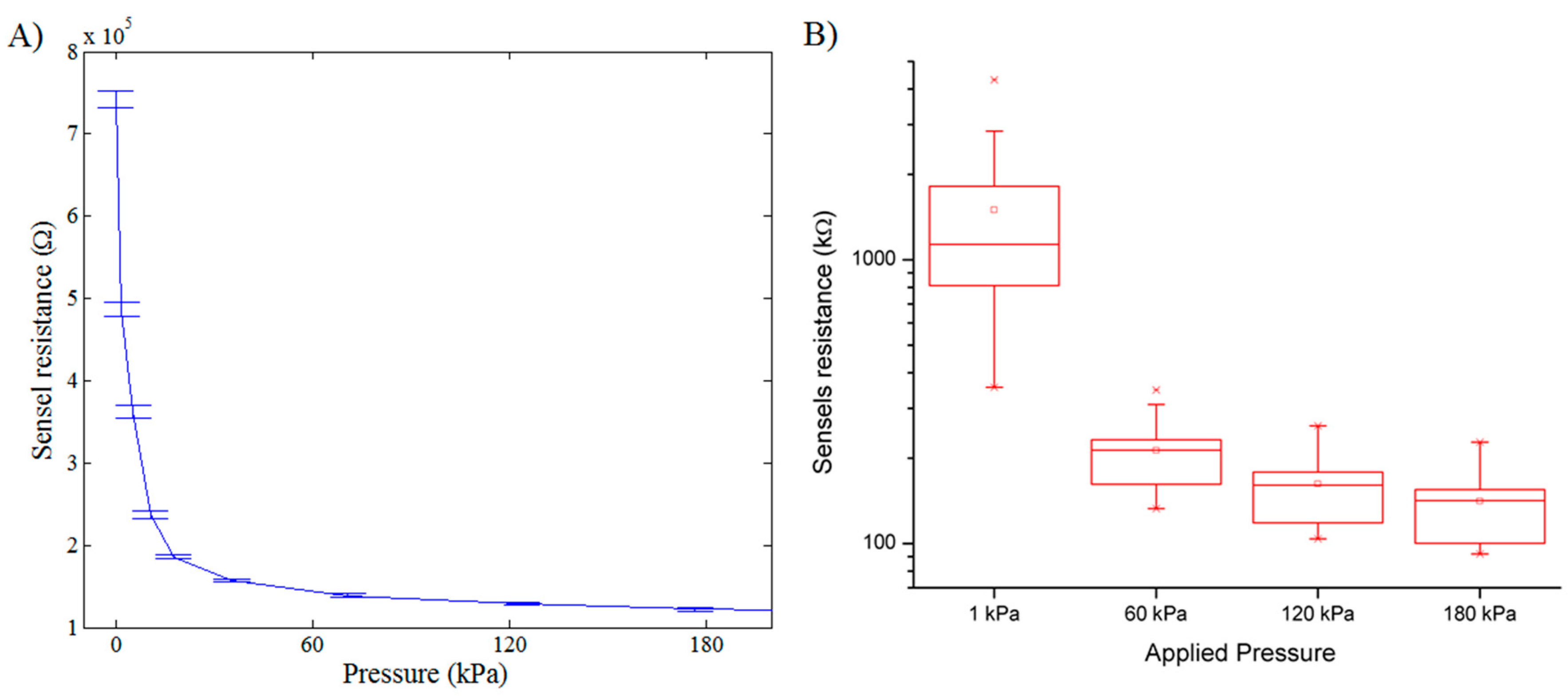
2.5. Characterization, Equalization, and Calibration
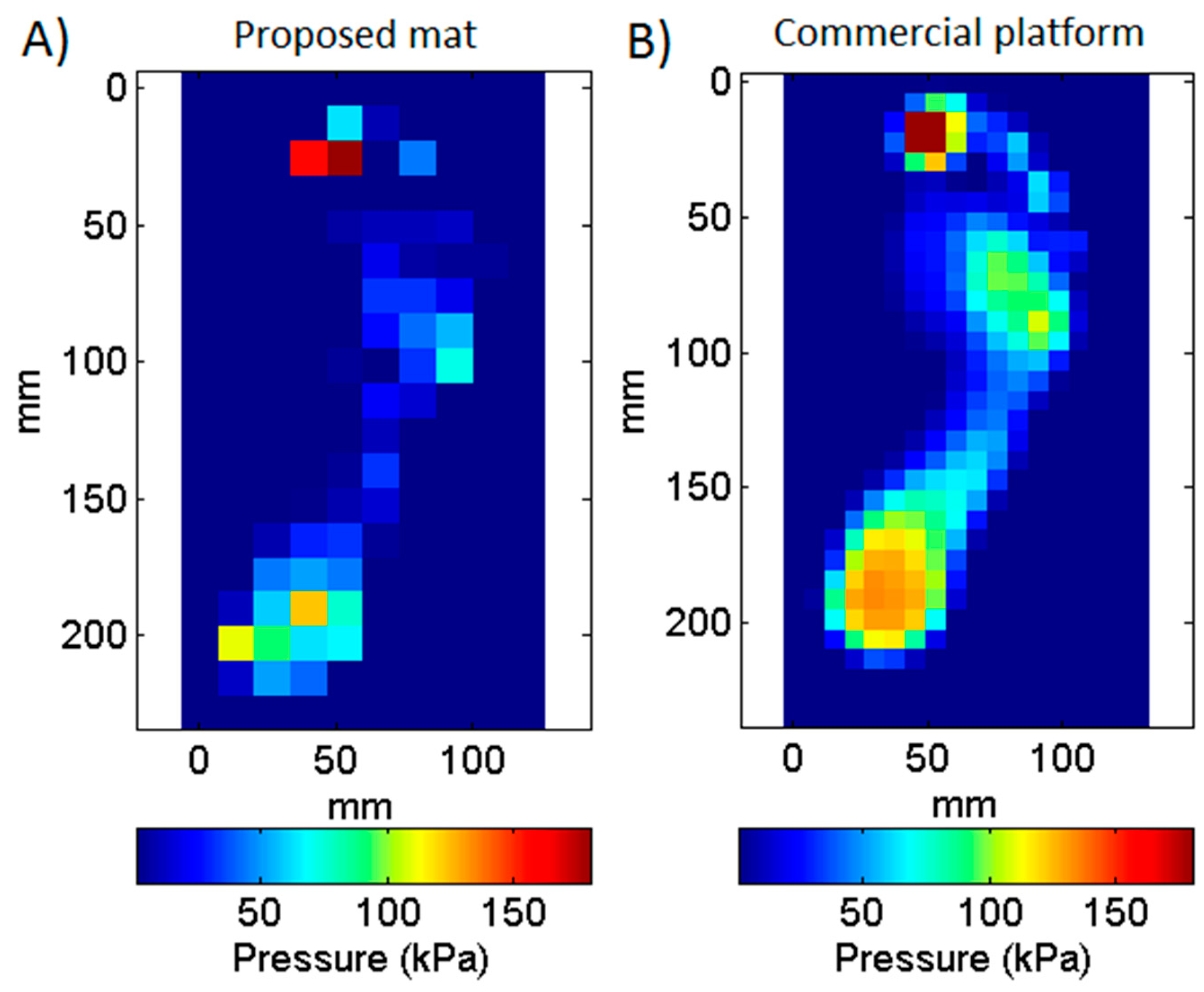
2.6. Validation
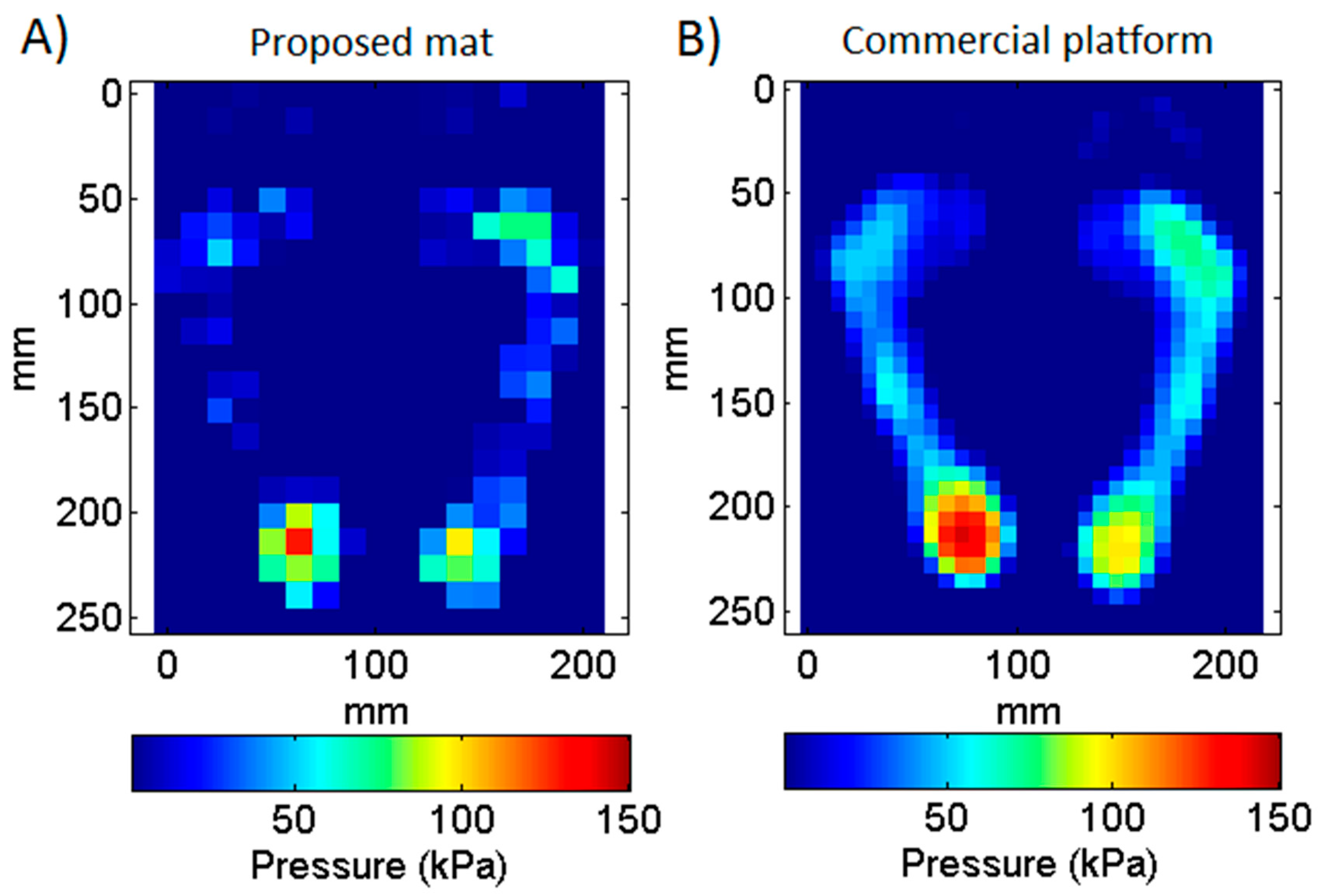
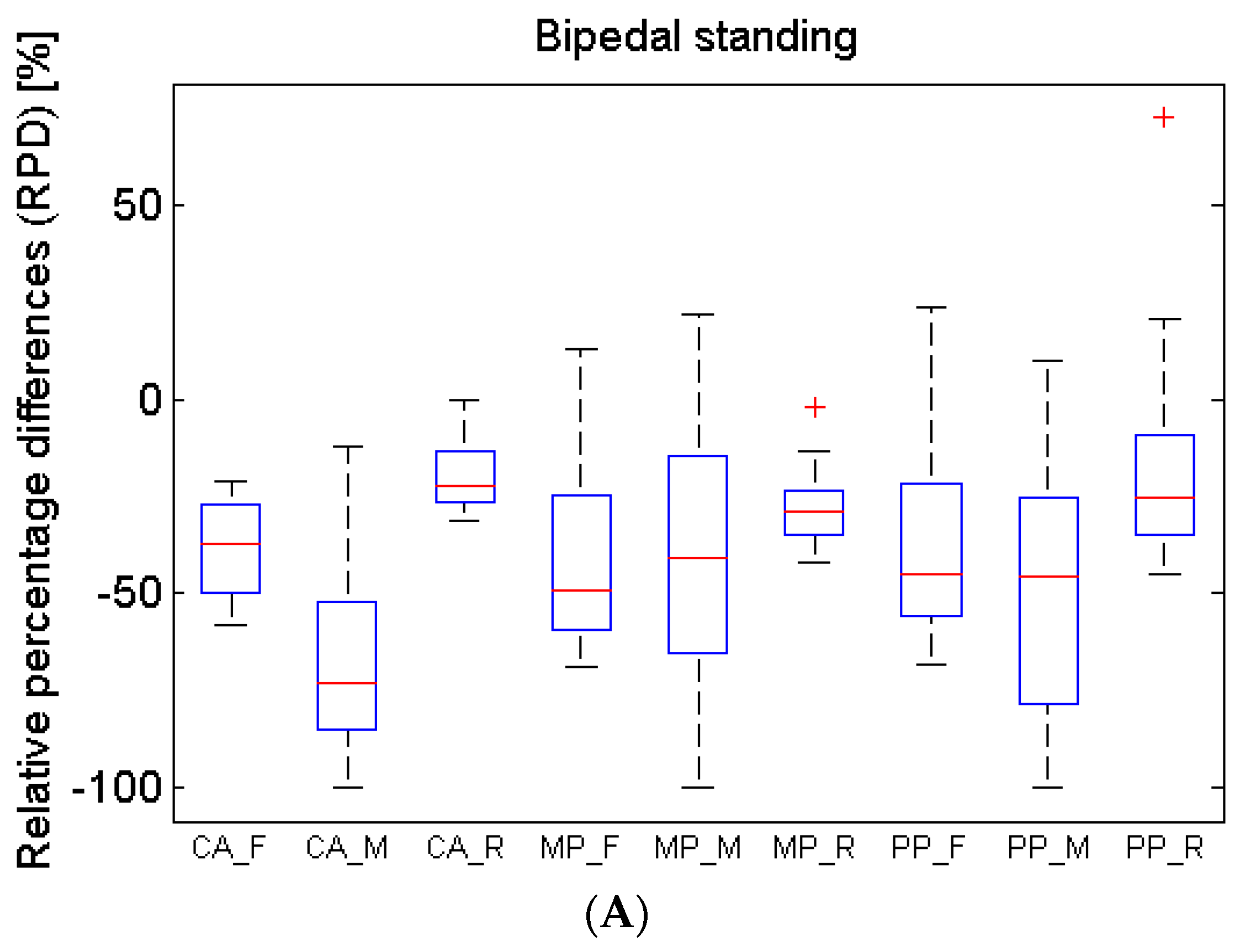
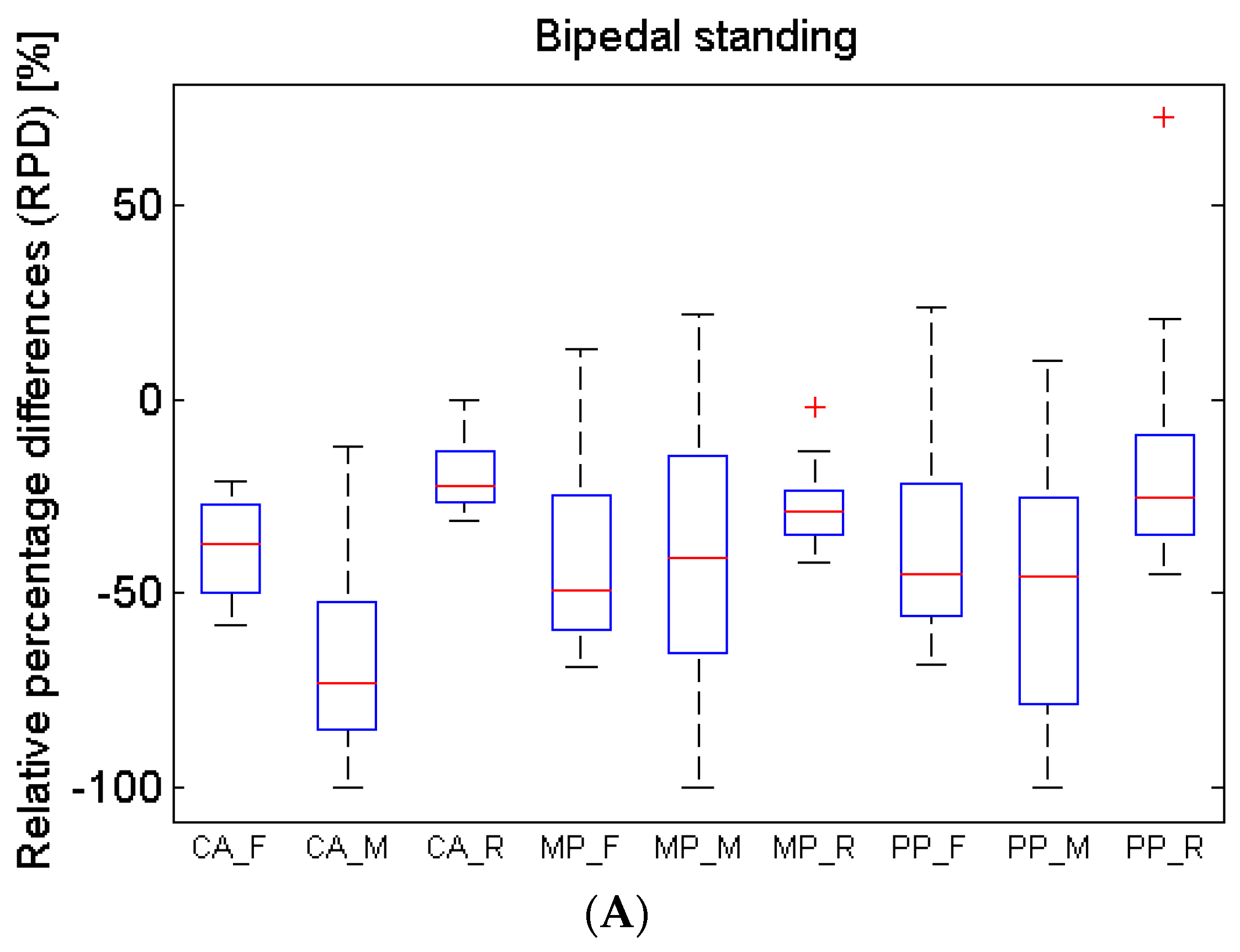
- Bipedal static standing. In this test, a subject was asked to stand as still as possible for 30 s in a comfortable position having the feet parallel and placed at a distance approximately correspondent to the shoulder width. Three trials were performed for each subject.
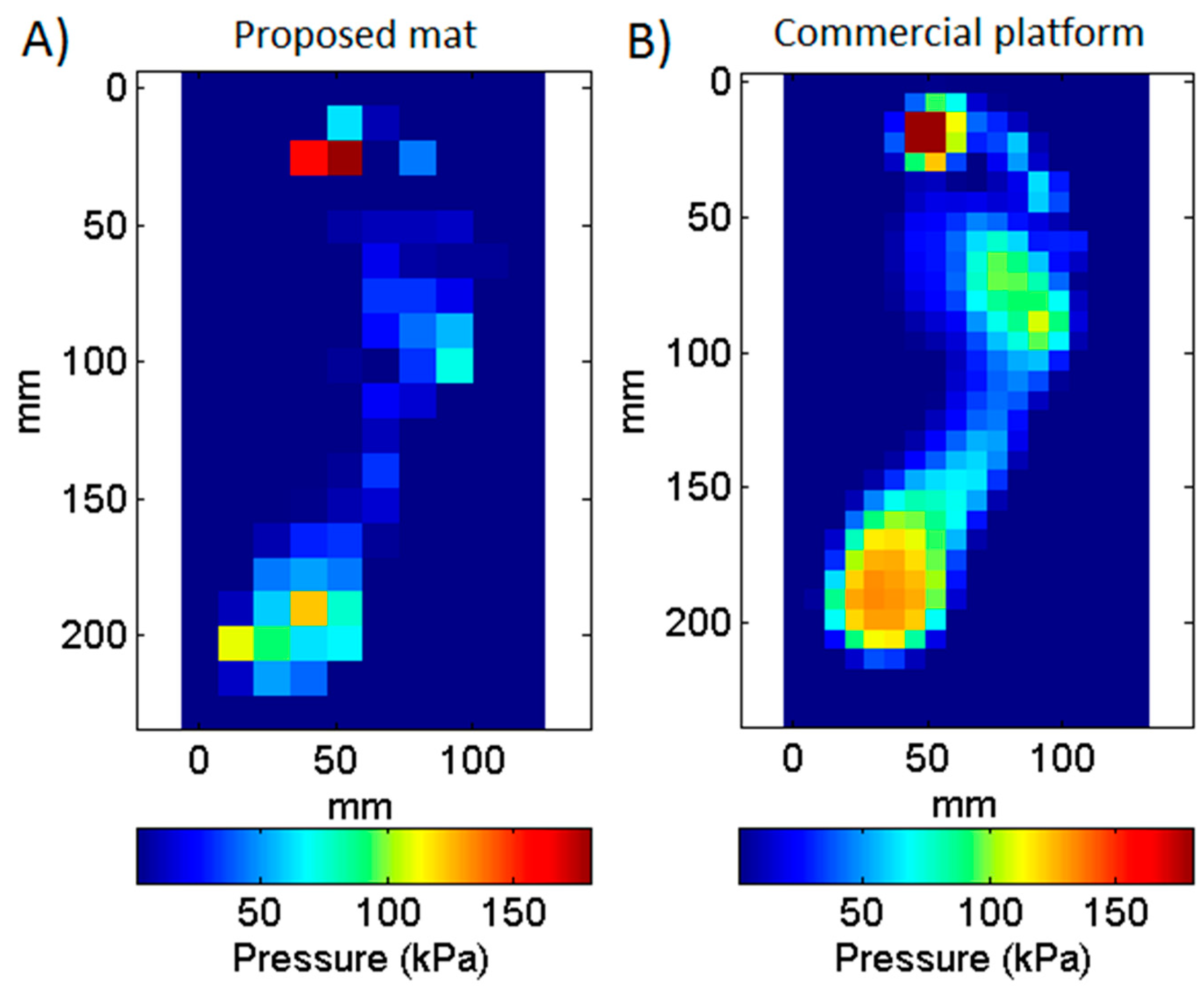
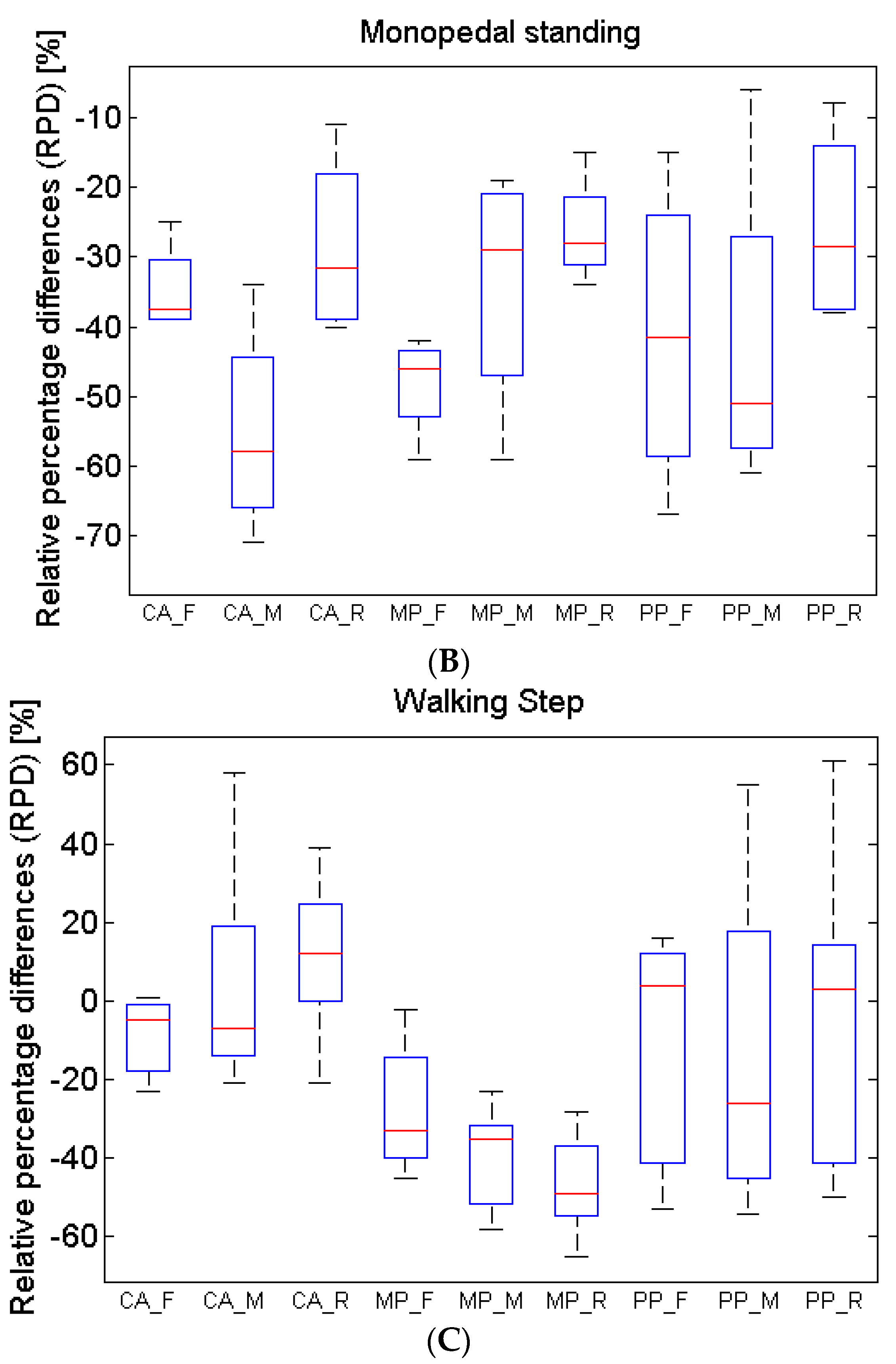
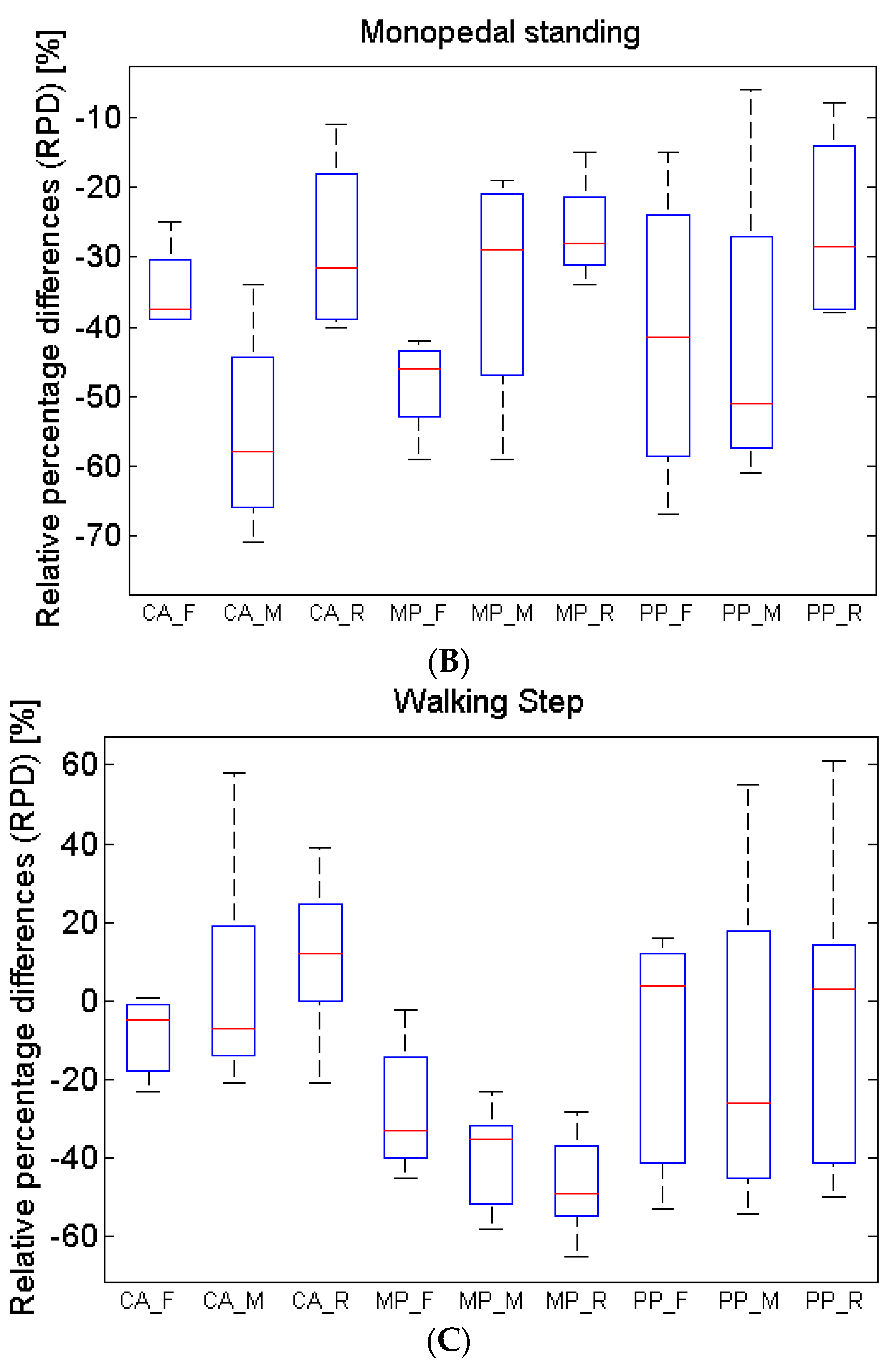
- Unipedal static standing. Similar to (1) but supporting the body with one limb only having the other suspended at medial malleolus height. Two trials were performed for each subject (one for each foot).
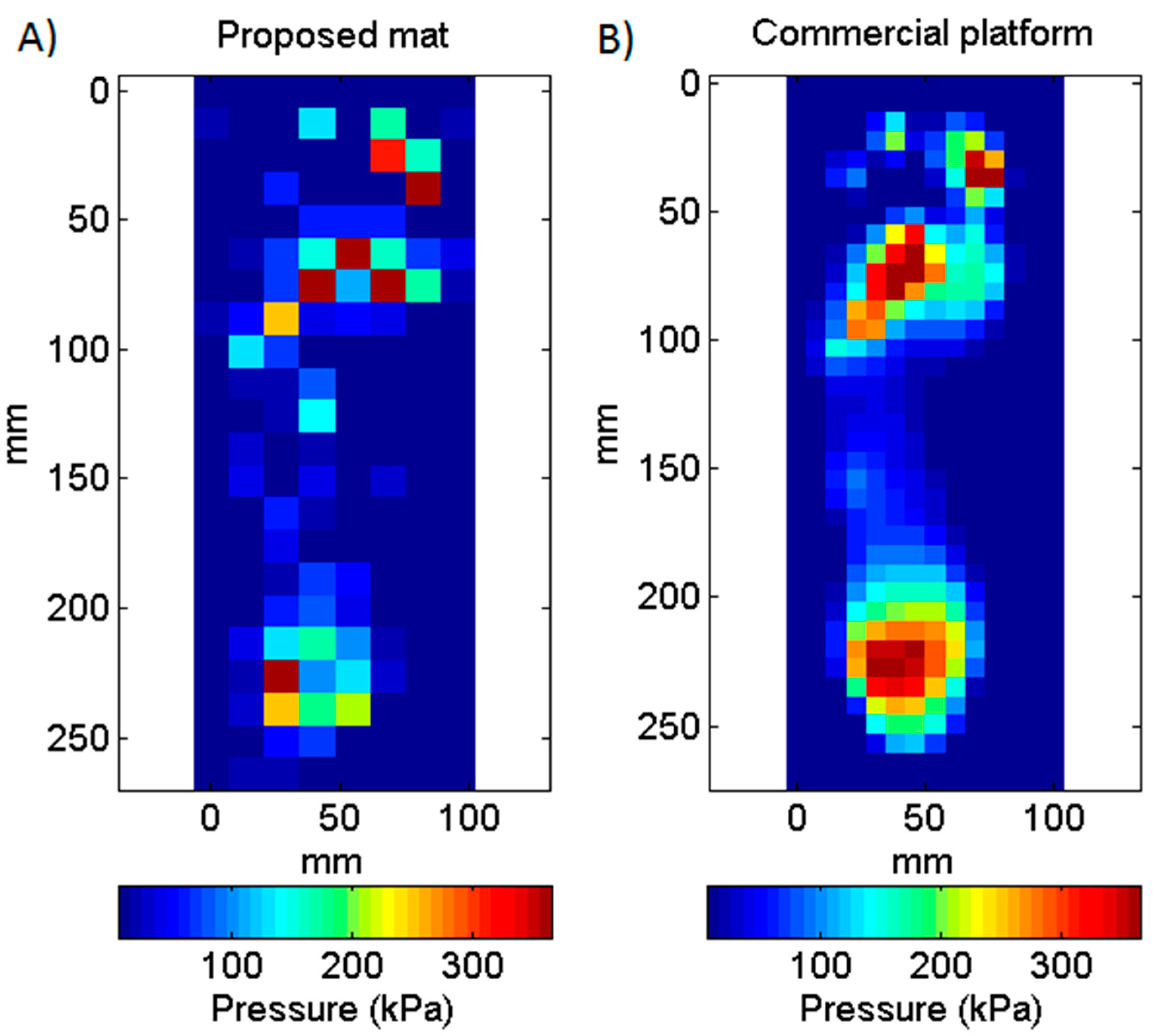
- Walking (dynamic). The subject walked onto the mat/platform surface taking care to hit the devices with a single foot. The acquisition area of the mat was limited to 8 × 21 sensels in order to increase the acquisition speed to 20 Hz. Three trials were performed for each subject (with the same foot).
- Contact areas in the forefoot, midfoot, and rearfoot (expressed in mm2). Foot segmentation was done according to the procedure proposed by Cavanagh and Rodgers [26]. Contact areas were calculated by summing the area covered for non-zero sensels in each foot zone.
- Mean and peak contact pressure in the forefoot, midfoot, and rearfoot (in kPa).
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| PEDOT:PSS | poly(3,4-ethylenedioxythiophene):poly(styrenesulfonate) |
| LAN | Local Area Network |
| CAD | Computer Assisted Design |
| ADC | Analog to Digital Converter |
| PGA | Programmable Gain Amplifier |
| PCB | Printed Circuit Board |
| SoC | System On a Chip |
| RPD | Relative Percentage Differences |
Appendix A
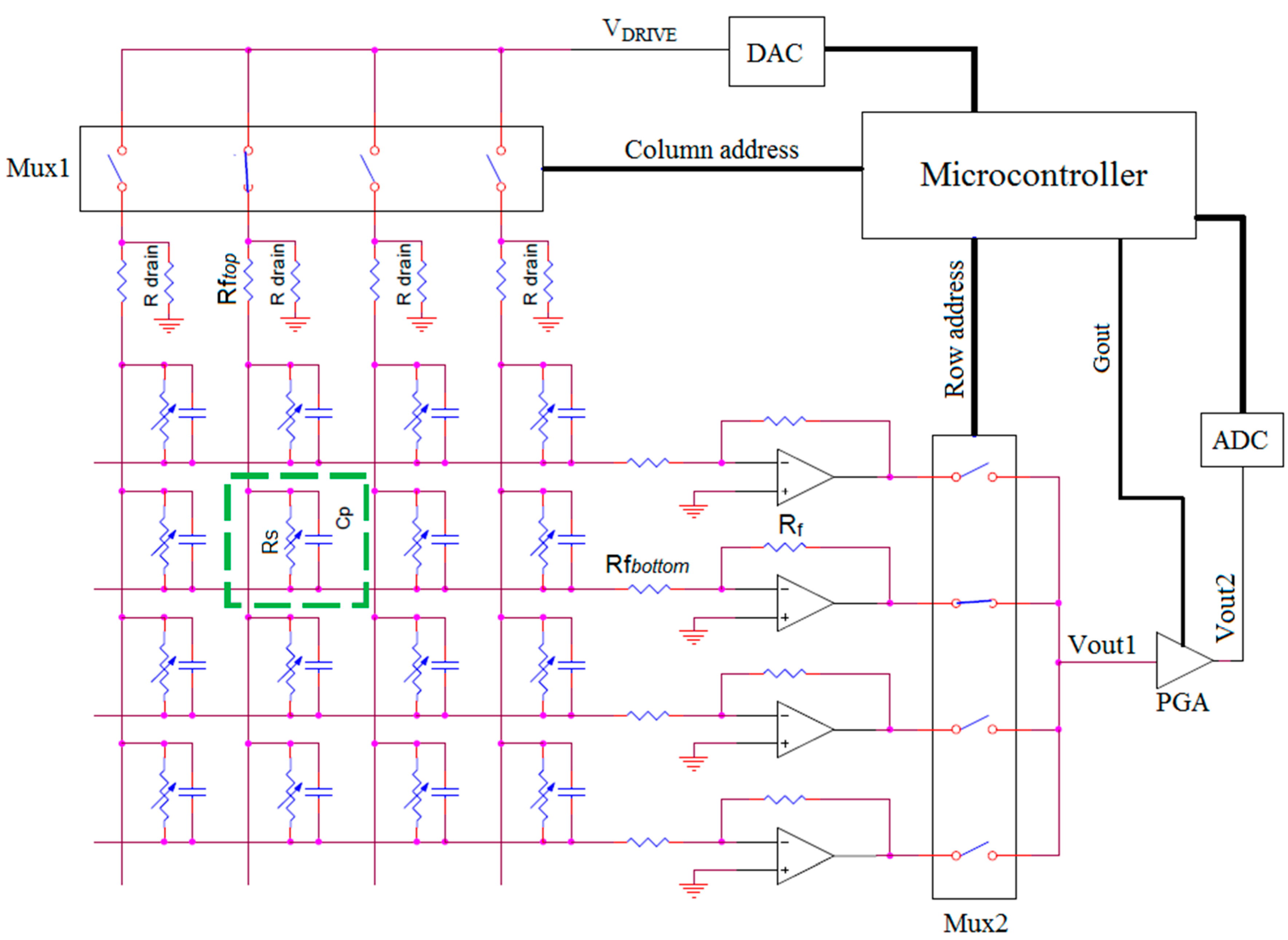
- DAC: Digital-to-analog converter (MCP4921—Microchip Technology): Generate the polarization voltage that drives the sensels. Receive SPI commands from the microncontroller.
- Mux1: Analog multiplexer (ADG731—Analog Devices): Directs the polarization voltage to the column (top conductive path) of the sensel to read. Receive SPI commands from the microncontroller.
- Operational amplifiers (MCP6V14—Microchip Technology) in transimpedance configuration: Transform into voltage the current of each row (bottom conductive paths) of sensels.
- Mux2: Analog multiplexer (ADG731—Analog Devices): Selects the output voltage of the row (bottom conductive paths) where the sensel to read is located. Receive SPI commands from the microncontroller.
- PGA: Programable gain amplifier (MCP6S21—Microchip Technology): Amplify the output voltage in order to obtain the voltage suitable to be digitalized. Amplifica il voltaggio di misura per la sua corretta digitalizzazione. Receive SPI commands from the microncontroller.
- ADC: Digital-to-analog converter (MCP3001—Microchip Technology): Transforms the output voltage to a digital data that is transmitted to the microcontroller using SPI communication.
- Microcontroller (Atmel ATmega32u4 on Arduino Yún board): Implements all the data acquisition logic. Communicates with the System-on-a-Chip (SoC) through a TTL serial interface. It’s programmed in C language using Arduino environment.
- SoC: System-on-a-Chip (Atheros AR9331 on Arduino Yún board): Implements the logic for data storing, acquisition management, web-server tasks and user interfaces back-end. Coomunicates with user interface devices using Wi-Fi communication. It’s programmed in Javascript language under Node.js environment.
References
- Guralnik, J.M.; Branch, L.G.; Cummings, S.R.; Curb, J.D. Physical performance measures in aging research. J. Gerontol. 1989, 44, M141–M146. [Google Scholar] [CrossRef] [PubMed]
- Ozturk, A.; Simsek, T.T.; Yumin, E.T.; Sertel, M.; Yumin, M. The relationship between physical, functional capacity and quality of life (QoL) among elderly people with a chronic disease. Arch. Gerontol. Geriatr. 2011, 53, 278–283. [Google Scholar] [CrossRef] [PubMed]
- Guralnik, J.M.; Ferrucci, L.; Simonsick, E.M.; Salive, M.E.; Wallace, R.B. Lower-extremity function in persons over the age of 70 years as a predictor of subsequent disability. N. Engl. J. Med. 1995, 332, 556–561. [Google Scholar] [CrossRef] [PubMed]
- Piirtola, M.; Era, P. Force Platform Measurements as Predictors of Falls among Older People: A Review. Gerontology 2006, 52, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Razak, A.H.A.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot plantar pressure measurement system: A review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [PubMed]
- Chevalier, T.L.; Hodgins, H.; Chockalingam, N. Plantar pressure measurements using an in-shoe system and a pressure platform: A comparison. Gait Posture 2010, 31, 397–399. [Google Scholar] [CrossRef] [PubMed]
- Shu, L.; Hua, T.; Wang, Y.; Li, Q.; Feng, D.D.; Tao, X. In-shoe plantar pressure measurement and analysis system based on fabric pressure sensing array. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 767–775. [Google Scholar] [PubMed]
- Tan, H.Z.; Slivovsky, L.A.; Pentland, A. A sensing chair using pressure distribution sensors. IEEE ASME Trans. Mechatron. 2001, 6, 261–268. [Google Scholar] [CrossRef]
- Papakostas, T.V.; Lima, J.; Lowe, M. A large area force sensor for smart skin applications. Proc. IEEE Sens. 2002, 2, 1620–1624. [Google Scholar]
- Post, E.R.; Orth, M.; Russo, P.R.; Gershenfeld, N. E-broidery: Design and fabrication of textile-based computing. IBM Syst. J. 2000, 39, 840–860. [Google Scholar] [CrossRef]
- Meyer, J.; Arnrich, B.; Schumm, J.; Troster, G. Design and modeling of a textile pressure sensor for sitting posture classification. IEEE Sens. J. 2010, 10, 1391–1398. [Google Scholar] [CrossRef]
- Xu, W.; Huang, M.C.; Amini, N.; He, L.; Sarrafzadeh, M. ECushion: A textile pressure sensor array design and calibration for sitting posture analysis. IEEE Sens. J. 2013, 13, 3926–3934. [Google Scholar] [CrossRef]
- Sundholm, M.; Cheng, J.; Zhou, B.; Sethi, A.; Lukowicz, P. Smart-Mat: Recognizing and Counting Gym Exercises with Low-Cost Resistive Pressure Sensing Matrix. In Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 373–382.
- Lee, J.; Kwon, H.; Seo, J.; Shin, S.; Koo, J.H.; Pang, C.; Son, S.; Kim, J.H.; Jang, Y.H.; Kim, D.E.; et al. Conductive Fiber-Based Ultrasensitive Textile Pressure Sensor for Wearable Electronics. Adv. Mater. 2015, 27, 2433–2439. [Google Scholar] [CrossRef] [PubMed]
- Takamatsu, S.; Kobayashi, T.; Shibayama, N.; Miyake, K.; Itoh, T. Fabric pressure sensor array fabricated with die-coating and weaving techniques. Sens. Actuators A Phys. 2012, 184, 57–63. [Google Scholar] [CrossRef]
- Tu, H.; Chen, X.; Feng, X.; Xu, Y. A post-CMOS compatible smart yarn technology based on SOI wafers. Sens. Actuators A Phys. 2015, 233, 397–404. [Google Scholar] [CrossRef]
- Dunn, J.E.; Link, C.L.; Felson, D.T.; Crincoli, M.G.; Keysor, J.J.; McKinlay, J.B. Prevalence of Food and Ankle Conditions in a Multiethnic Community Sample of Older Adults. Am. J. Epidemiol. 2004, 159, 491–498. [Google Scholar] [CrossRef] [PubMed]
- Mattana, G.; Cosseddu, P.; Fraboni, B.; Malliaras, G.G.; Hinestroza, J.P.; Bonfiglio, A. Organic electronics on natural cotton fibres. Org. Electron. 2011, 12, 2033–2039. [Google Scholar] [CrossRef]
- Zhang, P.; Lau, Y.Y.; Tang, W.; Gomez, M.R.; French, D.M.; Zier, J.C.; Gilgenbach, R.M. Contact Resistance with Dissimilar Materials: Bulk Contacts and Thin Film Contacts. In Proceedings of the IEEE 57th Holm Conference on Electrical Contacts, Minneapolis, MN, USA, 11–14 September 2011; pp. 1–6.
- Archard, J.F. Contact and Rubbing of Flat Surfaces. J. Appl. Phys. 1953, 24, 981–988. [Google Scholar] [CrossRef]
- Shimojo, M.; Namiki, A.; Ishikawa, M.; Makino, R.; Mabuchi, K. A Tactile Sensor Sheet Using Pressure Conductive Rubber With Electrical-Wires Stitched Method. IEEE Sens. J. 2004, 4, 589–596. [Google Scholar] [CrossRef]
- Kuş, M.; Okur, S. Electrical characterization of PEDOT:PSS beyond humidity saturation. Sens. Actuators B Chem. 2009, 143, 177–181. [Google Scholar] [CrossRef]
- Arduino Arduino Yún. Available online: https://www.arduino.cc/en/Main/ArduinoBoardYun (accessed on 9 February 2016).
- Pau, M.; Galli, M.; Celletti, C.; Morico, G.; Leban, B.; Albertini, G.; Camerota, F. Plantar pressure patterns in women affected by Ehlers-Danlos syndrome while standing and walking. Res. Dev. Disabil. 2013, 34, 3720–3726. [Google Scholar] [CrossRef] [PubMed]
- Pau, M.; Leban, B.; Corona, F.; Gioi, S.; Nussbaum, M.A. School-based screening of plantar pressures during level walking with a backpack among overweight and obese schoolchildren. Ergonomics 2015, 0139, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Cavanagh, P.R.; Rodgers, M.; Virginia, W. Technical Note the Arch Index: A Useful Measure. J. Biomech. 1987, 20, 547–551. [Google Scholar] [CrossRef]
- Lang, U.; Rust, P.; Schoberle, B.; Dual, J. Piezoresistive properties of PEDOT:PSS. Microelectron. Eng. 2009, 86, 330–334. [Google Scholar] [CrossRef]
- Latessa, G.; Brunetti, F.; Reale, A.; Saggio, G.; Di Carlo, A. Piezoresistive behaviour of flexible PEDOT:PSS based sensors. Sens Actuators B Chem. 2009, 139, 304–309. [Google Scholar] [CrossRef]
- Bubnova, O.; Khan, Z.U.; Malti, A.; Braun, S.; Fahlman, M.; Berggren, M.; Crispin, X. Optimization of the thermoelectric figure of merit in the conducting polymer poly(3,4-ethylenedioxythiophene). Nat. Mater. 2011, 10, 429–433. [Google Scholar] [CrossRef] [PubMed]
- Zeng, W.; Shu, L.; Li, Q.; Chen, S.; Wang, F.; Tao, X.M. Fiber-based wearable electronics: A review of materials, fabrication, devices, and applications. Adv. Mater. 2014, 26, 5310–5336. [Google Scholar] [CrossRef] [PubMed]
- Bosch, K.; Nagel, A.; Weigend, L.; Rosenbaum, D. From “first” to “last” steps in life—Pressure patterns of three generations. Clin. Biomech. 2009, 24, 676–681. [Google Scholar] [CrossRef] [PubMed]
- Yamada, T.; Demura, S. Relationships between ground reaction force parameters during a sit-to-stand movement and physical activity and falling risk of the elderly and a comparison of the movement characteristics between the young and the elderly. Arch. Gerontol. Geriatr. 2009, 48, 73–77. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bipedal Standing (Right Foot Figure 9) | Unipedal Standing (Foot Figure 10) | Walking Step (Foot Figure 11) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Mat | Platform | RPD | Mat | Platform | RPD | Mat | Platform | RPD | ||
| Contact area [mm2] | F | 3168 | 4129 | −23% | 2448 | 4027 | −39% | 4752 | 4996 | −5% |
| M | 1584 | 2447 | −35% | 1152 | 2957 | −61% | 3024 | 3314 | −9% | |
| R | 2016 | 2804 | −28% | 2592 | 2906 | −11% | 4032 | 3772 | 7% | |
| Mean pressure [kPa] | F | 27 | 35 | −23% | 23 | 39 | −42% | 116 | 118 | −2% |
| M | 16 | 32 | −49% | 13 | 32 | −59% | 29 | 43 | −31% | |
| R | 46 | 51 | −9% | 51 | 77 | −34% | 86 | 167 | −49% | |
| Peak pressure [kPa] | F | 76 | 74 | 3% | 72 | 108 | −33% | 600 | 530 | 13% |
| M | 38 | 60 | −37% | 32 | 81 | −61% | 147 | 95 | 55% | |
| R | 97 | 99 | −2% | 123 | 134 | −8% | 400 | 365 | 10% | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saenz-Cogollo, J.F.; Pau, M.; Fraboni, B.; Bonfiglio, A. Pressure Mapping Mat for Tele-Home Care Applications. Sensors 2016, 16, 365. https://doi.org/10.3390/s16030365
Saenz-Cogollo JF, Pau M, Fraboni B, Bonfiglio A. Pressure Mapping Mat for Tele-Home Care Applications. Sensors. 2016; 16(3):365. https://doi.org/10.3390/s16030365
Chicago/Turabian StyleSaenz-Cogollo, Jose Francisco, Massimiliano Pau, Beatrice Fraboni, and Annalisa Bonfiglio. 2016. "Pressure Mapping Mat for Tele-Home Care Applications" Sensors 16, no. 3: 365. https://doi.org/10.3390/s16030365
APA StyleSaenz-Cogollo, J. F., Pau, M., Fraboni, B., & Bonfiglio, A. (2016). Pressure Mapping Mat for Tele-Home Care Applications. Sensors, 16(3), 365. https://doi.org/10.3390/s16030365